Remote Sensing of Boreal Wetlands 1: Data Use for Policy and Management

 ,
, 

 ,
,  ,
,
Abstract
1. Introduction
2. Objective 1: History and Uses of Remote Sensing of Wetland Ecosystems
3. Objective 2: Feasibility of Remotely Sensed Data Products for Wetland Applications
3.1. Approach
3.2. Results: Feasibility of Remote Sensing for Wetland Applications
4. Objective 3: Best Approaches for Wetland Inventory and Monitoring
4.1. Wetland Extent for Baseline Inventory and Long-Term Monitoring
4.2. Characterizing Wetland Hydrology, Hydroperiod, and Water Cycling
4.3. Remote Sensing of Wetland Biogeochemistry
4.4. Ecosystem Productivity and Change
5. Objective 4: Optimal Remote Sensing of Wetland Applications based on User Needs, Cost, and Feasibility
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Costanza, R.; de Groot, R.; Sutton, P.; van der Ploeg, S.; Anderson, S.J.; Kubiszewski, I.; Farber, S.; Turner, R.K. Changes in the global value of ecosystem services. Glob. Environ. Chang. 2014, 26, 152–158. [Google Scholar] [CrossRef]
- Gardner, R.; Finlayson, M. Global Wetland Outlook: State of the World’s Wetlands and their Services to People; Ramsar Convention Secretariat: Gland, Switzerland, 2018. [Google Scholar]
- Finlayson, C.M.; Capon, S.J.; Rissik, D.; Pittock, J.; Fisk, G.; Davidson, N.C.; Bodmin, K.A.; Papas, P.; Robertson, H.A.; Schallenberg, M.; et al. Policy considerations for managing wetlands under a changing climate. Mar. Freshw. Res. 2017, 68, 1803–1815. [Google Scholar] [CrossRef]
- He, J.; Moffette, F.; Fournier, R.; Revéret, J.-P.; Théau, J.; Dupras, J.; Boyer, J.-P.; Varin, M. Meta-analysis for the transfer of economic benefits of ecosystem services provided by wetlands within two watersheds in Quebec, Canada. Wetl. Ecol. Manag. 2015, 23, 707–725. [Google Scholar] [CrossRef]
- Fournier, R.A.; Grenier, M.; Lavoie, A.; Hélie, R. Towards a strategy to implement the Canadian Wetland Inventory using satellite remote sensing. Can. J. Remote Sens. 2007, 33 (Suppl. 1), S1–S16. [Google Scholar] [CrossRef]
- Anderson, R.R.; Wobber, F.J. Wetlands Mapping in New Jersey. Photogramm. Eng. Remote Sens. 1973, 47, 223–227. [Google Scholar]
- Anderson, V.J.; Hardin, P.J. Infrared photo interpretation of non-riparian wetlands. Rangelands 1992, 14, 334–337. [Google Scholar]
- Cowardin, L.M.; Gilmer, D.S.; Mechlin, L.M. Characteristics of Central North Dakota Wetlands Determined from Sample Aerial Photographs and Ground Study. Wildl. Soc. Bull. (1973–2006) 1981, 9, 280–288. [Google Scholar]
- Cowardin, L.M.; Myers, V.I. Remote sensing for identification and classification of wetland vegetation. J. Wildland Manag. 1974, 38, 308–314. [Google Scholar] [CrossRef]
- Vitt, D.H.; Halsey, L.A.; Zoltai, S.C. The Bog Landforms of Continental Western Canada in Relation to Climate and Permafrost Patterns. Arct. Alp. Res. 1994, 26, 1–13. [Google Scholar] [CrossRef]
- Zoltai, S.C.; Vitt, D.H. Canadian wetlands: Environmental gradients and classification. Vegetation 1995, 118, 131–137. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Quinton, W. Quantifying errors in discontinuous permafrost plateau change from optical data, Northwest Territories, Canada: 1947–2008. Can. J. Remote Sens. 2010, 36, S211–S223. [Google Scholar] [CrossRef]
- Hopkinson, C.; Horrigan, K.; Cane, T.; Gaborit, S.; McLernon, S.; Pennington, S.; Quon, S.; Woo, L.; Mulamoottil, G.; Jasinski, P.; et al. An integrated approach to the planning and management of urban wetlands: The case of Bechtel Park Wetland, Waterloo, Ontario. Can. Water Resour. J. Rev. Can. Ressour. Hydr. 1997, 22, 45–56. [Google Scholar] [CrossRef]
- Quinton, W.L.; Hayashi, M.; Chasmer, L.E. Peatland hydrology of discontinuous permafrost in the Northwest Territories: Overview and synthesis. Can. Water Resour. J. Rev. Can. Ressour. Hydr. 2009, 34, 311–328. [Google Scholar] [CrossRef]
- Muller, S.V.; Racoviteanu, A.E.; Walker, D.A. Landsat MSS-derived land-cover map of northern Alaska: Extrapolation methods and a comparison with photo-interpreted and AVHRR-derived maps. Int. J. Remote Sens. 1999, 20, 2921–2946. [Google Scholar] [CrossRef]
- Rutchey, K.; Vilcheck, L. Air photointerpretation and satellite imagery analysis techniques for mapping cattail coverage in a northern everglades impoundment. Photogramm. Eng. Remote Sens. 1999, 65, 185–191. [Google Scholar]
- Ozesmi, S.L.; Bauer, M.E. Satellite remote sensing of wetlands. Wetl. Ecol. Manag. 2002, 10, 381–402. [Google Scholar] [CrossRef]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Rebelo, L.M.; Finlayson, C.M.; Nagabhatla, N. Remote sensing and GIS for wetland inventory, mapping and change analysis. J. Environ. Manag. 2009, 90, 2144–2153. [Google Scholar] [CrossRef]
- Gabrielsen, C.G.; Murphy, M.A.; Evans, J.S. Using a multiscale, probabilistic approach to identify spatial-temporal wetland gradients. Remote Sens. Environ. 2016, 184, 522–538. [Google Scholar] [CrossRef]
- Khanna, S.; Santos, M.J.; Ustin, S.L.; Shapiro, K.; Haverkamp, P.J.; Lay, M. Comparing the Potential of Multispectral and Hyperspectral Data for Monitoring Oil Spill Impact. Sensors 2018, 18, 558. [Google Scholar] [CrossRef] [PubMed]
- Marti-Cardona, B.; Dolz-Ripolles, J.; Lopez-Martinez, C. Wetland inundation monitoring by the synergistic use of ENVISAT/ASAR imagery and ancilliary spatial data. Remote Sens. Environ. 2013, 139, 171–184. [Google Scholar] [CrossRef]
- Montgomery, J.S.; Hopkinson, C.; Brisco, B.; Patterson, S.; Rood, S.B. Wetland hydroperiod classification in the western prairies using multitemporal synthetic aperture radar. Hydrol. Process. 2018, 32, 1476–1490. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Progress in Physical Geography. Prog. Phys. Geogr. Earth Environ. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Lindsay, J.B.; Creed, I.F.; Beall, F.D. Drainage basin morphometrics for depressional landscapes. Water Resour. Res. 2004, 40. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Sass, G.; Creed, I.; Sitar, M.; Kalbfleisch, W.; Treitz, P. Vegetation class dependent errors in lidar ground elevation and canopy height estimates in a boreal wetland environment. Can. J. Remote Sens. 2005, 31, 191–206. [Google Scholar] [CrossRef]
- Grabs, T.; Seibert, J.; Bishop, K.; Laudon, H. Modeling spatial patterns of saturated areas: A comparison of the topographic wetness index and a dynamic distributed model. J. Hydrol. 2009, 373, 15–23. [Google Scholar] [CrossRef]
- Cao, F.; Tzortziou, M.; Hu, C.; Mannino, A.; Fichot, C.G.; del Vecchio, R.; Najjar, R.G.; Novak, M. Remote sensing retrievals of colored dissolved organic matter and dissolved organic carbon dynamics in North American estuaries and their margins. Remote Sens. Environ. 2018, 205, 151–165. [Google Scholar] [CrossRef]
- Bubier, J.L.; Moore, T.R.; Bledzki, L.A. Effects of nutrient addition on vegetation and carbon cycling in an ombrotrophic bog. Glob. Chang. Biol. 2007, 13, 1168–1186. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Ackermann, F. Airborne laser scanning—Present status and future expectations. ISPRS J. Photogramm. Remote Sens. 1999, 54, 64–67. [Google Scholar] [CrossRef]
- Boerner, W.M.; Mott, H.; Livingstone, C.; Brisco, B.; Brown, R.; Paterson, J.S.; Luneburg, E.; van Zyl, J.J.; Randall, D.; Budkewitsch, P. Polarimetry in Remote Sensing: Basic and Applied Concepts, Chapter 5 in The Manual of Remote Sensing, 3rd ed.; Rencz, A.N., Ryerson, R.A., Eds.; Principles and Applications of Imaging Radar; American Society for Photogrammetry and Remote Sensing: Bethesda, MD, USA, 1998. [Google Scholar]
- Ulaby, F.T.; Dubois, P.C.; van Zyl, J. Radar mapping of surface soil moisture. J. Hydrol. 1996, 184, 57–84. [Google Scholar] [CrossRef]
- White, L.; Brisco, B.; Pregitzer, M.; Tedford, B.; Boychuk, L. RADARSAT-2 beam mode selection for surface water and flooded vegetation mapping. Can. J. Remote Sens. 2014, 40, 135–151. [Google Scholar]
- Amani, M.; Salehi, B.; Mahdavi, S.; Brisco, B. Spectral analysis of wetlands using multi-source optical satellite imagery. ISPRS J. Photogramm. Remote Sens. 2018, 144, 119–136. [Google Scholar] [CrossRef]
- Corcoran, J.; Knight, J.; Brisco, B.; Kaya, S.; Cull, A.; Murnaghan, K. The integration of optical, topographic, and radar data for wetland mapping in northern Minnesota. Can. J. Remote Sens. 2014, 37, 564–582. [Google Scholar] [CrossRef]
- Millard, K.; Redden, A.M.; Webster, T.; Stewart, H. Use of GIS and high resolution LiDAR in salt marsh restoration site suitability assessments in the upper Bay of Fundy, Canada. Wetl. Ecol. Manag. 2013, 21, 243–262. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.; Lee, Y.; Battaglia, M.; Endres, S.; Laubach, Z.; Scarbrough, K. Identification of Woodland Vernal Pools with Seasonal Change PALSAR Data for Habitat Conservation. Remote Sens. 2016, 8, 490. [Google Scholar] [CrossRef]
- Wu, Q.; Lane, C.; Liu, H. An Effective Method for Detecting Potential Woodland Vernal Pools Using High-Resolution LiDAR Data and Aerial Imagery. Remote Sens. 2014, 6, 11444–11467. [Google Scholar] [CrossRef]
- Creed, I.F.; Sandford, S.E.; Beall, F.D.; Molot, L.A.; Dillon, P.J. Cryptic wetlands: Integrating hidden wetlands in regression models of the export of dissolved organic carbon from forested landscapes. Hydrol. Process. 2003, 17, 3629–3648. [Google Scholar] [CrossRef]
- Anderson, K.; Bennie, J.J.; Milton, E.J.; Hughes, P.D.; Lindsay, R.; Meade, R. Combining LiDAR and IKONOS data for eco-hydrological classification of an ombrotrophic peatland. J. Environ. Qual. 2010, 39, 260–273. [Google Scholar] [CrossRef]
- Franklin, S.E.; Skeries, E.M.; Stefanuk, M.A.; Ahmed, O.S. Wetland classification using Radarsat-2 SAR quad-polarization and Landsat-8 OLI spectral response data: A case study in the Hudson Bay Lowlands Ecoregion. Int. J. Remote Sens. 2017, 39, 1615–1627. [Google Scholar] [CrossRef]
- Villa, P.; Laini, A.; Bresciani, M.; Bolpagni, R. A remote sensing approach to monitor the conservation status of lacustrine Phragmites australis beds. Wetl. Ecol. Manag. 2013, 21, 399–416. [Google Scholar] [CrossRef]
- Töyrä, J.; Pietroniro, A. Towards operational monitoring of a northern wetland using geomatics-based techniques. Remote Sens. Environ. 2005, 97, 174–191. [Google Scholar] [CrossRef]
- Irwin, K.; Beaulne, D.; Braun, A.; Fotopoulos, G. Optical Imagery and Airborne LiDAR for Surface Water Detection. Remote Sens. 2017, 9, 890. [Google Scholar] [CrossRef]
- Hummel, S.; Hudak, A.T.; Uebler, E.H.; Falkowski, M.J.; Megown, K.A. A comparison of accuracy and cost of LiDAR versus stand exam data for landscape management on the Malheur National Forest. J. For. 2011, 109, 267–273. [Google Scholar]
- Arzandeh, S.; Wang, J. Texture evaluation of RADARSAT imagery for wetland mapping. Can. J. Remote Sens. 2002, 28, 653–666. [Google Scholar] [CrossRef]
- Berhane, T.M.; Lane, C.R.; Wu, Q.; Anenkhonov, O.A.; Chepinoga, V.V.; Autrey, B.C.; Liu, H. Comparing Pixel- and Object-Based Approaches in Effectively Classifying Wetland-Dominated Landscapes. Remote Sens. 2018, 10, 46. [Google Scholar] [CrossRef]
- Berhane, T.M.; Lane, C.R.; Wu, Q.; Autrey, B.C.; Anenkhonov, O.A.; Chepinoga, V.V.; Liu, H. Decision-Tree, Rule-Based, and Random Forest Classification of High-Resolution Multispectral Imagery for Wetland Mapping and Inventory. Remote Sens. 2018, 10, 580. [Google Scholar]
- Bourgeau-Chavez, L.; Endres, S.; Battaglia, M.; Miller, M.; Banda, E.; Laubach, Z.; Higman, P.; Chow-Fraser, P.; Marcaccio, J. Development of a Bi-National Great Lakes Coastal Wetland and Land Use Map Using Three-Season PALSAR and Landsat Imagery. Remote Sens. 2015, 7, 8655–8682. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Quinton, W.; Veness, T.; Baltzer, J. A decision-tree classification for low-lying complex land cover types within the zone of discontinuous permafrost. Remote Sens. Environ. 2014, 143, 73–84. [Google Scholar] [CrossRef]
- Chen, Z.; Pasher, J.; Duffe, J.; Behnamian, A. Mapping Arctic Coastal Ecosystems with High Resolution Optical Satellite Imagery Using a Hybrid Classification Approach. Can. J. Remote Sens. 2017, 43, 513–527. [Google Scholar] [CrossRef]
- Dash, J.; Mathur, A.; Foody, G.M.; Curran, P.J.; Chipman, J.W.; Lillesand, T.M. Land cover classification using multi-temporal MERIS vegetation indices. Int. J. Remote Sens. 2007, 28, 1137–1159. [Google Scholar] [CrossRef]
- Durieux, L.; de Grandi, G.D.K.; Achard, F. Object-oriented and textural image classification of the Siberia GBFM radar mosaic combined with MERIS imagery for continental scale land cover mapping. Int. J. Remote Sens. 2007, 28, 4175–4182. [Google Scholar] [CrossRef]
- Forzieri, G.; Castelli, F.; Preti, F. Advances in remote sensing of hydraulic roughness. Int. J. Remote Sens. 2011, 33, 630–654. [Google Scholar] [CrossRef]
- Frey, K.E.; Smith, L.C. How well do we know northern land cover? Comparison of four global vegetation and wetland products with a new ground-truth database for West Siberia. Glob. Biogeochem. Cycles 2007, 21. [Google Scholar] [CrossRef]
- Grenier, M.; Demers, A.-M.; Labrecque, S.; Benoit, M.; Fournier, R.A.; Drolet, B. An object-based method to map wetland using RADARSAT-1 and Landsat ETM images: Test case on two sites in Quebec, Canada. Can. J. Remote Sens. 2007, 33, S28–S45. [Google Scholar] [CrossRef]
- Held, A.; Ticehurst, C.; Lymburner, L.; Williams, N. High resolution mapping of tropical mangrove ecosystems using hyperspectral and radar remote sensing. Int. J. Remote Sens. 2010, 24, 2739–2759. [Google Scholar] [CrossRef]
- Hogg, A.R.; Holland, J. An evaluation of DEMs derived from lidar and photogrammetry for wetland mapping. For. Chron. 2008, 84, 840–849. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Despain, D.G.; Clark, R.N.; Livo, K.E. Mapping vegetation in Yellowstone National Park using spectral feature analysis of AVIRIS data. Remote Sens. Environ. 2003, 84, 437–456. [Google Scholar] [CrossRef]
- Kumar, L.; Sinha, P.; Taylor, S. Improving image classification in a complex wetland ecosystem through image fusion techniques. J. Appl. Remote Sens. 2014, 8, 083616. [Google Scholar] [CrossRef]
- Kumar, R.; Rosen, P.; Misra, T. NASA-ISRO synthetic aperture radar: Science and applications. Earth Obs. Mission. Sens. 2016, 9881, 988103. [Google Scholar]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Brisco, B. An Assessment of Simulated Compact Polarimetric SAR Data for Wetland Classification Using Random Forest Algorithm. Can. J. Remote Sens. 2017, 43, 468–484. [Google Scholar] [CrossRef]
- Maxa, M.; Bolstad, P. Mapping northern wetlands with high resolution satellite images and LiDAR. Wetlands 2009, 29, 248–260. [Google Scholar] [CrossRef]
- McCarthy, M.J.; Radabaugh, K.R.; Moyer, R.P.; Muller-Karger, F.E. Enabling efficient, large-scale high-spatial resolution wetland mapping using satellites. Remote Sens. Environ. 2018, 208, 189–201. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. On the importance of training data sample selection in random forest image classification: A case study in peatland ecosystem mapping. Remote Sens. 2015, 7, 8489–8515. [Google Scholar] [CrossRef]
- Mitrakis, N.E.; Topaloglou, C.A.; Alexandridis, T.K.; Theocharis, J.B.; Zalidis, G.C. Decision fusion of GA self-organizing neuro-fuzzy multilayered classifiers for land cover classification using textural and spectral features. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2137–2152. [Google Scholar] [CrossRef]
- Papa, F.; Legrésy, B.T.; Rémy, F. Use of the Topex–Poseidon dual-frequency radar altimeter over land surfaces. Remote Sens. Environ. 2003, 87, 136–147. [Google Scholar] [CrossRef]
- Pengra, B.W.; Johnston, C.A.; Loveland, T.R. Mapping an invasive plant, Phragmites australis, in coastal wetlands using the EO-1 Hyperion hyperspectral sensor. Remote Sens. Environ. 2007, 108, 74–81. [Google Scholar] [CrossRef]
- Racine, M.; Bernier, M.; Ouarda, T. Evaluation of RADARSAT-1 images acquired in fine mode for the study of boreal peatlands: A case study in James Bay, Canada. Can. J. Remote Sens. 2005, 31, 450–467. [Google Scholar] [CrossRef]
- Rahman, M.M.; Sumantyo, J.T.S. Mapping tropical forest cover and deforestation using synthetic aperture radar (SAR) images. Appl. Geomat. 2010, 2, 113–121. [Google Scholar] [CrossRef]
- Rapinel, S.; Hubert-Moy, L.; Clément, B. Combined use of LiDAR data and multispectral earth observation imagery for wetland habitat mapping. Int. J. Appl. Earth Obs. Geoinf. 2015, 37, 56–64. [Google Scholar] [CrossRef]
- Steyaert, L.T.; Hall, F.G.; Loveland, T.R. Land cover mapping, fire regeneration, and scaling studies in the Canadian boreal forest with 1 km AVHRR and Landsat TM data. J. Geophys. Res. Atmos. 1997, 102, 29581–29598. [Google Scholar] [CrossRef]
- Sulla-Menashe, D.; Friedl, M.A.; Krankina, O.N.; Baccini, A.; Woodcock, C.E.; Sibley, A.; Sun, G.; Kharuk, V.; Elsakov, V. Hierarchical mapping of Northern Eurasian land cover using MODIS data. Remote Sens. Environ. 2011, 115, 392–403. [Google Scholar] [CrossRef]
- Whyte, A.; Ferentinos, K.P.; Petropoulos, G.P. A new synergistic approach for monitoring wetlands using Sentinels -1 and 2 data with object-based machine learning algorithms. Environ. Model. Softw. 2018, 104, 40–54. [Google Scholar] [CrossRef]
- Wright, C.; Gallant, A. Improved wetland remote sensing in Yellowstone National Park using classification trees to combine TM imagery and ancillary environmental data. Remote Sens. Environ. 2007, 107, 582–605. [Google Scholar] [CrossRef]
- Zabel, F.; Hank, T.B.; Mauser, W. Improving arable land heterogeneity information in available land cover products for land surface modelling using MERIS NDVI data. Hydrol. Earth Syst. Sci. 2010, 14, 2073–2084. [Google Scholar] [CrossRef]
- Amani, M.; Mahdavi, S.; Afshar, M.; Brisco, B.; Huang, W.; Mirzadeh, S.M.J.; White, L.; Banks, S.; Montgomery, J.; Hopkinson, C. Canadian Wetland Inventory using Google Earth Engine: The First Map and Preliminary Results. Remote Sens. 2019, 11, 842. [Google Scholar] [CrossRef]
- Amani, M.; Salehi, B.; Mahdavi, S.; Granger, J.; Brisco, B. Wetland classification in Newfoundland and Labrador using multi-source SAR and optical data integration. GISci. Remote Sens. 2017, 54, 779–796. [Google Scholar] [CrossRef]
- Baker, C.; Lawrence, R.; Montagne, C.; Patten, D. Mapping wetlands and riparian areas using Landsat ETM+ imagery and decision-tree-based models. Wetlands 2006, 26, 465–474. [Google Scholar] [CrossRef]
- Barrette, J.; August, P.; Golet, F. Accuracy assessment of wetland boundary delineation using aerial photography and digital orthophotography. Photogramm. Eng. Remote Sens. 2000, 66, 409–416. [Google Scholar]
- Belluco, E.; Camuffo, M.; Ferrari, S.; Modenese, L.; Silvestri, S.; Marani, A.; Marani, M. Mapping salt-marsh vegetation by multispectral and hyperspectral remote sensing. Remote Sens. Environ. 2006, 105, 54–67. [Google Scholar] [CrossRef]
- Betbeder, J.; Rapinel, S.; Corgne, S.; Pottier, E.; Hubert-Moy, L. TerraSAR-X dual-pol time-series for mapping of wetland vegetation. ISPRS J. Photogramm. Remote Sens. 2015, 107, 90–98. [Google Scholar] [CrossRef]
- Bubier, J.L.; Rock, B.N.; Crill, P.M. Spectral reflectance measurements of boreal wetland and forest mosses. J. Geophys. Res. Atmos. 1997, 102, 29483–29494. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Montgomery, J.; Petrone, R. A Physically-based terrain morphology and vegetation structural classification for wetlands of the Boreal Plains, Alberta Canada. Can. J. Remote Sens. 2016, 42, 521–540. [Google Scholar] [CrossRef]
- Dechka, J.A.; Franklin, S.E.; Watmough, M.D.; Bennett, R.P.; Ingstrup, D.W. Classification of wetland habitat and vegetation communities using multi-temporal Ikonos imagery in southern Saskatchewan. Can. J. Remote Sens. 2002, 28, 679–685. [Google Scholar] [CrossRef]
- Dillabaugh, K.A.; King, D.J. Riparian marshland composition and biomass mapping using Ikonos imagery. Can. J. Remote Sens. 2008, 34, 143–158. [Google Scholar] [CrossRef]
- Everitt, J.H.; Yang, C.; Fletcher, R.S.; Davis, M.R.; Drawe, D.L. Using Aerial Color-infrared Photography and QuickBird Satellite Imagery for Mapping Wetland Vegetation. Geocarto Int. 2004, 19, 15–22. [Google Scholar] [CrossRef]
- Frohn, R.C.; Reif, M.; Lane, C.; Autrey, B. Satellite Remote Sensing of Isolated Wetlands Using Object-Oriented Classification of Landsat-7 Data. Wetlands 2009, 29, 931–941. [Google Scholar] [CrossRef]
- Ghioca-Robrecht, D.; Johnston, C.A.; Tulbure, M.G. Assessing the use of multiseason QuickBird imagery for mapping invasive species in a Lake Erie coastal marsh. Wetlands 2008, 28, 1028–1039. [Google Scholar] [CrossRef]
- Gray, P.; Ridge, J.; Poulin, S.; Seymour, A.; Schwantes, A.; Swenson, J.; Johnston, D. Integrating Drone Imagery into High Resolution Satellite Remote Sensing Assessments of Estuarine Environments. Remote Sens. 2018, 10, 1257. [Google Scholar] [CrossRef]
- Grenier, M.; Labrecque, S.; Garneau, M.; Tremblay, A. Object-based classification of a SPOT-4 image for mapping wetlands in the context of greenhouse gases emissions: The case of the Eastmain region, Québec, Canada. Can. J. Remote Sens. 2008, 34, S398–S413. [Google Scholar] [CrossRef]
- Hird, J.; DeLancey, E.; McDermid, G.; Kariyeva, J. Google Earth Engine, Open-Access Satellite Data, and Machine Learning in Support of Large-Area Probabilistic Wetland Mapping. Remote Sens. 2017, 9, 1315. [Google Scholar] [CrossRef]
- Jollineau, M.Y.; Howarth, P.J. Mapping an inland wetland complex using hyperspectral imagery. Int. J. Remote Sens. 2008, 29, 3609–3631. [Google Scholar] [CrossRef]
- Kloiber, S.M.; Macleod, R.D.; Smith, A.J.; Knight, J.F.; Huberty, B.J. A Semi-Automated, Multi-Source Data Fusion Update of a Wetland Inventory for East-Central Minnesota, USA. Wetlands 2015, 35, 335–348. [Google Scholar] [CrossRef]
- Laamrani, A.; Valeria, O.; Bergeron, Y.; Fenton, N.; Cheng, L.Z. Distinguishing and mapping permanent and reversible paludified landscapes in Canadian black spruce forests. Geoderma 2015, 237–238, 88–97. [Google Scholar] [CrossRef]
- Lang, M.; McCarty, G.; Oesterling, R.; Yeo, I.-Y. Topographic metrics for improved mapping of forested wetlands. Wetlands 2013, 33, 141–155. [Google Scholar] [CrossRef]
- Li, J.; Chen, W. A rule-based method for mapping Canada’s wetlands using optical, radar and DEM data. Int. J. Remote Sens. 2011, 26, 5051–5069. [Google Scholar] [CrossRef]
- Mack, B.; Roscher, R.; Stenzel, S.; Feilhauer, H.; Schmidtlein, S.; Waske, B. Mapping raised bogs with an iterative one-class classification approach. ISPRS J. Photogramm. Remote Sens. 2016, 120, 53–64. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Rezaee, M.; Mohammadimanesh, F.; Zhang, Y. Very Deep Convolutional Neural Networks for Complex Land Cover Mapping Using Multispectral Remote Sensing Imagery. Remote Sens. 2018, 10, 1119. [Google Scholar] [CrossRef]
- Merchant, M.A.; Adams, J.R.; Berg, A.A.; Baltzer, J.L.; Quinton, W.L.; Chasmer, L.E. Contributions of C-Band SAR Data and Polarimetric Decompositions to Subarctic Boreal Peatland Mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1467–1482. [Google Scholar] [CrossRef]
- Merchant, M.A.; Warren, R.K.; Edwards, R.; Kenyon, J.K. An Object-Based Assessment of Multi-Wavelength SAR, Optical Imagery and Topographical Datasets for Operational Wetland Mapping in Boreal Yukon, Canada. Can. J. Remote Sens. 2019, 45, 308–332. [Google Scholar] [CrossRef]
- Middleton, M.; Närhi, P.; Arkimaa, H.; Hyvönen, E.; Kuosmanen, V.; Treitz, P.; Sutinen, R. Ordination and hyperspectral remote sensing approach to classify peatland biotopes along soil moisture and fertility gradients. Remote Sens. Environ. 2012, 124, 596–609. [Google Scholar] [CrossRef]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Brisco, B.; Gill, E. Full and simulated compact polarimetry SAR responses to Canadian wetlands: Separability analysis and classification. Remote Sens. 2019, 11, 516. [Google Scholar] [CrossRef]
- Murphy, P.N.C.; Ogilvie, J.; Connor, K.; Arp, P.A. Mapping wetlands: A comparison of two different approaches for New Brunswick, Canada. Wetlands 2007, 27, 846–854. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Krankina, O.N.; Cohen, W.B. Satellite-based peatland mapping: Potential of the MODIS sensor. Glob. Planet. Chang. 2007, 56, 248–257. [Google Scholar] [CrossRef]
- Pistolesi, L.I.; Ni-Meister, W.; McDonald, K.C. Mapping wetlands in the Hudson Highlands ecoregion with ALOS PALSAR: An effort to identify potential swamp forest habitat for golden-winged warblers. Wetl. Ecol. Manag. 2015, 23, 95–112. [Google Scholar] [CrossRef]
- Place, J.L. Mapping of forested wetland: Use of SEASAT radar images to complement conventional sources. Prof. Geogr. 1985, 37, 463–469. [Google Scholar] [CrossRef]
- Rocchini, D.; Ricotta, C.; Chiarucci, A. Using satellite imagery to assess plant species richness: The role of multispectral systems. Appl. Veg. Sci. 2007, 10, 325–331. [Google Scholar] [CrossRef]
- Rokitnicki-Wojcik, D.; Wei, A.; Chow-Fraser, P. Transferability of object-based rule sets for mapping coastal high marsh habitat among different regions in Georgian Bay, Canada. Wetl. Ecol. Manag. 2011, 19, 223–236. [Google Scholar] [CrossRef]
- Wang, J.; Shang, J.; Brisco, B.; Brown, R.J. Evaluation of Multidate ERS-1 and Multispectral Landsat Imagery for Wetland Detection in Southern Ontario. Can. J. Remote Sens. 2014, 24, 60–68. [Google Scholar] [CrossRef]
- Wasser, L.; Chasmer, L.; Day, R.; Taylor, A. Quantifying land use effects on forested riparian buffer vegetation structure using LiDAR data. Ecosphere 2015, 6, 1–17. [Google Scholar] [CrossRef]
- White, L.; Millard, K.; Banks, S.; Richardson, M.; Pasher, J.; Duffe, J. Moving to the RADARSAT Constellation Mission: Comparing Synthesized Compact Polarimetry and Dual Polarimetry Data with Fully Polarimetric RADARSAT-2 Data for Image Classification of Peatlands. Remote Sens. 2017, 9, 573. [Google Scholar] [CrossRef]
- Wilen, B.O.; Bates, M.K. The US Fish and Wildlife Service’s National Wetlands Inventory project. Vegetation 1995, 118, 153–169. [Google Scholar] [CrossRef]
- Andrew, M.; Ustin, S. The role of environmental context in mapping invasive plants with hyperspectral image data. Remote Sens. Environ. 2008, 112, 4301–4317. [Google Scholar] [CrossRef]
- Baschuk, M.S.; Ervin, M.D.; Clark, W.R.; Armstrong, L.M.; Wrubleski, D.A.; Goldsborough, G.L. Using satellite imagery to assess macrophyte response to water-level manipulations in the Saskatchewan River Delta, Manitoba. Wetlands 2012, 32, 1091–1102. [Google Scholar] [CrossRef]
- Becker, B.L.; Lusch, D.P.; Qi, J. A classification-based assessment of the optimal spectral and spatial resolutions for Great Lakes coastal wetland imagery. Remote Sens. Environ. 2007, 108, 111–120. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; Kasischke, E.S.; Brunzell, S.M.; Mudd, J.P.; Smith, K.B.; Frick, A.L. Analysis of space-borne SAR data for wetland mapping in Virginia riparian ecosystems. Int. J. Remote Sens. 2001, 22, 3665–3687. [Google Scholar] [CrossRef]
- Budei, B.C.; St-Onge, B.; Hopkinson, C.; Audet, F.-A. Identifying the genus or species of individual trees using a three-wavelength airborne lidar system. Remote Sens. Environ. 2018, 204, 632–647. [Google Scholar] [CrossRef]
- Bustamante, J.; Aragonés, D.; Afán, I.; Luque, C.; Pérez-Vázquez, A.; Castellanos, E.; Díaz-Delgado, R. Hyperspectral Sensors as a Management Tool to Prevent the Invasion of the Exotic Cordgrass Spartina densiflora in the Doñana Wetlands. Remote Sens. 2016, 8, 1001. [Google Scholar] [CrossRef]
- Cabezas, J.; Galleguillos, M.; Valdés, A.; Fuentes, J.P.; Pérez, C.; Perez-Quezada, J.F. Evaluation of impacts of management in an anthropogenic peatland using field and remote sensing data. Ecosphere 2015, 6, 1–24. [Google Scholar] [CrossRef]
- Davranche, A.; Lefebvre, G.; Poulin, B. Wetland monitoring using classification trees and SPOT-5 seasonal time series. Remote Sens. Environ. 2010, 114, 552–562. [Google Scholar] [CrossRef]
- Dogan, O.K.; Akyurek, Z.; Beklioglu, M. Identification and mapping of submerged plants in a shallow lake using Quickbird satellite data. J. Environ. Manag. 2009, 90, 2138–2143. [Google Scholar] [CrossRef]
- Evans, T.L.; Costa, M. Landcover classification of the Lower Nhecolândia subregion of the Brazilian Pantanal Wetlands using ALOS/PALSAR, RADARSAT-2 and ENVISAT/ASAR imagery. Remote Sens. Environ. 2013, 128, 118–137. [Google Scholar] [CrossRef]
- Filippi, A.M.; Jensen, J.R. Fuzzy learning vector quantization for hyperspectral coastal vegetation classification. Remote Sens. Environ. 2006, 100, 512–530. [Google Scholar] [CrossRef]
- Hess, L.; Melack, J.M.; Novo, E.M.L.M.; Barbosa, C.C.F.; Gastil, M. Dual-season mapping of wetland inundation and vegetation for the central Amazon basin. Remote Sens. Environ. 2003, 87, 404–428. [Google Scholar] [CrossRef]
- Hestir, E.L.; Khanna, S.; Andrew, M.E.; Santos, M.J.; Viers, J.H.; Greenberg, J.A.; Rajapakse, S.S.; Ustin, S.L. Identification of invasive vegetation using hyperspectral remote sensing in the California Delta ecosystem. Remote Sens. Environ. 2008, 112, 4034–4047. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Gynan, C.; Mahoney, C.; Sitar, M. Multisensor and Multispectral LiDAR Characterization and Classification of a Forest Environment. Can. J. Remote Sens. 2016, 42, 501–520. [Google Scholar] [CrossRef]
- Laba, M.; Blair, B.; Downs, R.; Monger, B.; Philpot, W.; Smith, S.; Sullivan, P.; Baveye, P.C. Use of textural measurements to map invasive wetland plants in the Hudson River National Estuarine Research Reserve with IKONOS satellite imagery. Remote Sens. Environ. 2010, 114, 876–886. [Google Scholar] [CrossRef]
- Midwood, J.D.; Chow-Fraser, P. Mapping floating and emergent aquatic vegetation in coastal wetlands of eastern Georgian Bay, Lake Huron, Canada. Wetlands 2010, 30, 1141–1152. [Google Scholar] [CrossRef]
- Onojeghuo, A.O.; Blackburn, G.A. Optimising the use of hyperspectral and LiDAR data for mapping reedbed habitats. Remote Sens. Environ. 2011, 115, 2025–2034. [Google Scholar] [CrossRef]
- Schmidtlein, S.; Zimmermann, P.; Schüpferling, R.; Weiß, C. Mapping the floristic continuum: Ordination space position estimated from imaging spectroscopy. J. Veg. Sci. 2007, 18, 131–140. [Google Scholar] [CrossRef]
- Shoko, C.; Mutanga, O. Examining the strength of the newly-launched Sentinel 2 MSI sensor in detecting and discriminating subtle differences between C3 and C4 grass species. ISPRS J. Photogramm. Remote Sens. 2017, 129, 32–40. [Google Scholar] [CrossRef]
- Shuman, C.S.; Ambrose, R.F. A comparison of remote sensing and ground-based methods for monitoring wetland restoration success. Restor. Ecol. 2003, 11, 325–333. [Google Scholar] [CrossRef]
- Stratoulias, D.; Balzter, H.; Zlinszky, A.; Tóth, V.R. A comparison of airborne hyperspectral-based classifications of emergent wetland vegetation at Lake Balaton, Hungary. Int. J. Remote Sens. 2018, 39, 5689–5715. [Google Scholar] [CrossRef]
- Verrelst, J.; Geerling, G.W.; Sykora, K.V.; Clevers, J.G.M. Mapping of aggregated floodplain plant communities using image fusion of CASI and LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2009, 11, 83–94. [Google Scholar] [CrossRef]
- Wei, A.; Chow-Fraser, P. Use of IKONOS imagery to map coastal wetlands of Georgian Bay. Fisheries 2007, 32, 167–173. [Google Scholar] [CrossRef]
- Whiteside, T.G.; Bartolo, R.E. Use of WorldView-2 time series to establish a wetland monitoring program for potential offsite impacts of mine site rehabilitation. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 24–37. [Google Scholar] [CrossRef]
- Zhang, C. Combining Hyperspectral and Lidar Data for Vegetation Mapping in the Florida Everglades. Photogramm. Eng. Remote Sens. 2014, 80, 733–743. [Google Scholar] [CrossRef]
- Zhang, C.; Xie, Z. Data fusion and classifier ensemble techniques for vegetation mapping in the coastal Everglades. Geocarto Int. 2013, 29, 228–243. [Google Scholar] [CrossRef]
- Zomer, R.J.; Trabucco, A.; Ustin, S.L. Building spectral libraries for wetlands land cover classification and hyperspectral remote sensing. J. Environ. Manag. 2009, 90, 2170–2177. [Google Scholar] [CrossRef]
- Allard, M.; Fournier, R.A.; Grenier, M.; Lefebvre, J.; Giroux, J.-F. Forty years of change in the bulrush marshes of the St. Lawrence Estuary and the impact of the Greater Snow Goose. Wetlands 2012, 32, 1175–1188. [Google Scholar]
- Baltzer, J.L.; Veness, T.; Chasmer, L.E.; Sniderham, A.; Quinton, W.L. Forests on thawing permafrost: Fragmentation, edge effects and net forest loss. Glob. Chang. Biol. 2014, 20, 824–834. [Google Scholar] [CrossRef] [PubMed]
- Brisco, B.; Ahern, F.; Murnaghan, K.; White, L.; Canisus, F.; Lancaster, P. Seasonal Change in Wetland Coherence as an Aid to Wetland Monitoring. Remote Sens. 2017, 9, 1280. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C. Threshold loss of discontinuous permafrost and landscape evolution. Glob. Chang. Biol. 2017, 23, 2672–2686. [Google Scholar] [CrossRef] [PubMed]
- Feilhauer, H.; Schmid, T.; Faude, U.; Sánchez-Carrillo, S.; Cirujano, S. Are remotely sensed traits suitable for ecological analysis? A case study of long-term drought effects on leaf mass per area of wetland vegetation. Ecol. Indic. 2018, 88, 232–240. [Google Scholar] [CrossRef]
- Helbig, M.; Pappas, C.; Sonnentag, O. Permafrost thaw and wildfire: Equally important drivers of boreal tree cover changes in the Taiga Plains, Canada. Geophys. Res. Lett. 2016, 43, 1598–1606. [Google Scholar] [CrossRef]
- Helbig, M.; Wischnewski, K.; Kljun, N.; Chasmer, L.E.; Quinton, W.L.; Detto, M.; Sonnentag, O. Regional atmospheric cooling and wetting effect of permafrost thaw-induced boreal forest loss. Glob. Chang. Biol. 2016, 22, 4048–4066. [Google Scholar] [CrossRef]
- Jorgenson, M.; Frost, G.; Dissing, D. Drivers of Landscape Changes in Coastal Ecosystems on the Yukon-Kuskokwim Delta, Alaska. Remote Sens. 2018, 10, 1280. [Google Scholar] [CrossRef]
- Little-Devito, M.; Mendoza, C.A.; Chasmer, L.; Kettridge, N.; Devito, K.J. Opportunistic wetland formation on reconstructed landforms in a sub-humid climate: Influence of site and landscape-scale factors. Wetl. Ecol. Manag. 2019, 27, 587–608. [Google Scholar] [CrossRef]
- Mialon, A. Wetland seasonal dynamics and interannual variability over northern high latitudes, derived from microwave satellite data. J. Geophys. Res. 2005, 110. [Google Scholar] [CrossRef]
- Shapiro, K.; Khanna, S.; Ustin, S. Vegetation Impact and Recovery from Oil-Induced Stress on Three Ecologically Distinct Wetland Sites in the Gulf of Mexico. J. Mar. Sci. Eng. 2016, 4, 33. [Google Scholar] [CrossRef]
- Sutherland, G.; Chasmer, L.E.; Petrone, R.M.; Kljun, N.; Devito, K.J. Evaluating the use of spatially varying versus bulk average 3D vegetation structural inputs to modeled evapotranspiration within heterogeneous land cover types. Ecohydrology 2014, 7, 1545–1559. [Google Scholar] [CrossRef]
- Sweta, L.O.; Akwani, L.W. Monitoring water quality and land cover changes in Lake Victoria and Wetland Ecosystems using Earth observation. International Journal of Science and Research, Monitoring water quality and land cover changes in Lake Victoria and Wetland Ecosystems using Earth observation. Int. J. Sci. Res. 2014, 3, 1490–1497. [Google Scholar]
- Vanderhoof, M.; Burt, C. Applying High-Resolution Imagery to Evaluate Restoration-Induced Changes in Stream Condition, Missouri River Headwaters Basin, Montana. Remote Sens. 2018, 10, 913. [Google Scholar] [CrossRef]
- Arroyo-Mora, J.; Kalacska, M.; Soffer, R.; Moore, T.; Roulet, N.; Juutinen, S.; Ifimov, G.; Leblanc, G.; Inamdar, D. Airborne Hyperspectral Evaluation of Maximum Gross Photosynthesis, Gravimetric Water Content, and CO2 Uptake Efficiency of the Mer Bleue Ombrotrophic Peatland. Remote Sens. 2018, 10, 565. [Google Scholar] [CrossRef]
- Atkinson, D.; Treitz, P. Arctic Ecological Classifications Derived from Vegetation Community and Satellite Spectral Data. Remote Sens. 2012, 4, 3948–3971. [Google Scholar] [CrossRef]
- Byrd, K.B.; O’Connell, J.L.; di Tommaso, S.; Kelly, M. Evaluation of sensor types and environmental controls on mapping biomass of coastal marsh emergent vegetation. Remote Sens. Environ. 2014, 149, 166–180. [Google Scholar] [CrossRef]
- Hall, F.G.; Hilker, T.; Coops, N.C.; Lyapustin, A.; Huemmrich, K.F. Multi-angle remote sensing of forest light use efficiency by observing PRI variation with canopy shadow fraction. Remote Sens. Environ. 2008, 112, 3201–3211. [Google Scholar] [CrossRef]
- Johnston, C.A.; Naiman, R.J. The use of a geographic information system to analyze long-term landscape alteration by beaver. Landsc. Ecol. 1990, 4, 5–19. [Google Scholar] [CrossRef]
- Jones, L.A.; Kimball, J.S.; Reichle, R.H.; Madani, N.; Glassy, J.; Ardizzone, J.V.; Ardizzone, J.V.; Colliander, A.; Cleverly, J.; Desai, A.R.; et al. The SMAP Level 4 Carbon Product for Monitoring Ecosystem Land–Atmosphere CO2Exchange. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6517–6532. [Google Scholar] [CrossRef]
- Kalacska, M.; Arroyo-Mora, J.P.; Soffer, R.J.; Roulet, N.T.; Moore, T.R.; Humphreys, E.; Leblanc, G.; Lucanus, O.; Inamdar, D. Estimating peatland water table depth and net ecosystem exchange: A comparison between satellite and airborne imagery. Remote Sens. 2018, 10, 687. [Google Scholar] [CrossRef]
- Kalacska, M.; Lalonde, M.; Moore, T.R. Estimation of foliar chlorophyll and nitrogen content in an ombrotrophic bog from hyperspectral data: Scaling from leaf to image. Remote Sens. Environ. 2015, 169, 270–279. [Google Scholar] [CrossRef]
- Kross, A.; Seaquist, J.; Roulet, N. Light use efficiency of peatlands: Variability and suitability for modelling ecosystem production. Remote Sens. Environ. 2016, 183, 239–249. [Google Scholar] [CrossRef]
- Kross, A.; Seaquist, J.W.; Roulet, N.T.; Fernandes, R.; Sonnentag, O. Estimating carbon dioxide exchange rates at contrasting northern peatlands using MODIS satellite data. Remote Sens. Environ. 2013, 137, 234–243. [Google Scholar] [CrossRef]
- Niemann, K.O.; Quinn, G.; Goodenough, D.G.; Visintini, F.; Loos, R. Addressing the Effects of Canopy Structure on the Remote Sensing of Foliar Chemistry of a 3-Dimensional, Radiometrically Porous Surface. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 584–593. [Google Scholar] [CrossRef]
- Wang, L.; Wei, Y. Revised normalized difference nitrogen index (NDNI) for estimating canopy nitrogen concentration in wetlands. Optik 2016, 127, 7676–7688. [Google Scholar] [CrossRef]
- Yu, Y.; Saatchi, S. Sensitivity of L-band SAR backscatter to aboveground biomass of global forests. Remote Sens. 2016, 8, 522. [Google Scholar] [CrossRef]
- Abib, T.H.; Chasmer, L.; Hopkinson, C.; Mahoney, C.; Rodriguez, L.C.E. Seismic line impacts on proximal boreal forest and wetland environments in Alberta. Sci. Total Environ. 2019, 658, 1601–1613. [Google Scholar] [CrossRef]
- Chasmer, L.E.; Devito, K.J.; Hopkinson, C.D.; Petrone, R.M. Remote sensing of ecosystem trajectories as a proxy indicator for watershed water balance. Ecohydrology 2018, 11, e1987. [Google Scholar] [CrossRef]
- Sutherland, G.; Chasmer, L.; Kljun, N.; Devito, K.; Petrone, R. Using high resolution LiDAR data and a flux footprint parameterization to scale evapotranspiration estimates to lower pixel resolutions. Can. J. Remote Sens. 2017, 43, 215–229. [Google Scholar] [CrossRef][Green Version]
- Brown, H.E.; Diuk-Wasser, M.A.; Guan, Y.; Caskey, S.; Fish, D. Comparison of three satellite sensors at three spatial scales to predict larval mosquito presence in Connecticut wetlands. Remote Sens. Environ. 2008, 112, 2301–2308. [Google Scholar] [CrossRef]
- Goodale, R.; Hopkinson, C.; Colville, D.; Amirault-Langlais, D. Mapping piping plover (Charadrius melodus melodus) hagitat in coastal areas using airborne lidar data. Can. J. Remote Sens. 2007, 33, 519–533. [Google Scholar] [CrossRef]
- Halls, J.; Costin, K. Submerged and Emergent Land Cover and Bathymetric Mapping of Estuarine Habitats Using WorldView-2 and LiDAR Imagery. Remote Sens. 2016, 8, 718. [Google Scholar] [CrossRef]
- Pirie, L.D.; Francis, C.M.; Johnston, V.H. Evaluating the potential impact of a gas pipeline on whimbrel breeding habitat in the outer Mackenzie Delta, Northwest Territories. Avian Conserv. Ecol. 2009, 4, 4. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Petrone, R.; Sitar, M. Using multi-temporal and multi-spectral airborne lidar to assess depth of peat loss and correspondence with a new active normalized burn ratio for wildfires. Geophys. Res. Lett. 2017, 44, 11851–11859. [Google Scholar] [CrossRef]
- Fisher, J.B.; Tu, K.P.; Baldocchi, D.D. Global estimates of the land–atmosphere water flux based on monthly AVHRR and ISLSCP-II data, validated at 16 FLUXNET sites. Remote Sens. Environ. 2008, 112, 901–919. [Google Scholar] [CrossRef]
- Reichle, R.H.; de Lannoy, G.J.M.; Liu, Q.; Ardizzone, J.V.; Colliander, A.; Conaty, A.; Crow, W.; Jackson, T.J.; Jones, L.A.; Kimball, J.S.; et al. Assessment of the SMAP Level-4 Surface and Root-Zone Soil Moisture Product Using In Situ Measurements. J. Hydrometeorol. 2017, 18, 2621–2645. [Google Scholar] [CrossRef]
- Sonnentag, O.; Chen, J.M.; Roberts, D.A.; Talbot, J.; Halligan, K.Q.; Govind, A. Mapping tree and shrub leaf area indices in an ombrotrophic peatland through multiple endmember spectral unmixing. Remote Sens. Environ. 2007, 109, 342–360. [Google Scholar] [CrossRef]
- Jarihani, A.A.; Callow, J.N.; Johansen, K.; Gouweleeuw, B. Evaluation of multiple satellite altimetry data for studying inland water bodies and river floods. J. Hydrol. 2013, 505, 78–90. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Smith, L.C.; Melack, J.M. Amazon floodplain water level changes measured with interferometric SIR-C radar. IEEE Trans. Geosci. Remote Sens. 2001, 39, 423–431. [Google Scholar] [CrossRef]
- Bartsch, A.; Kidd, R.A.; Pathe, C.; Scipal, K.; Wagner, W. Satellite radar imagery for monitoring inland wetlands in boreal and sub-arctic environments. Aquat. Conserv. Mar. Freshw. Ecosyst. 2007, 17, 305–317. [Google Scholar] [CrossRef]
- Birkett, C.M.; Beckley, B. Investigating the Performance of the Jason-2/OSTM Radar Altimeter over Lakes and Reservoirs. Mar. Geod. 2010, 33, 204–238. [Google Scholar] [CrossRef]
- Bolanos, S.; Stiff, D.; Brisco, B.; Pietroniro, A. Operational Surface Water Detection and Monitoring Using Radarsat 2. Remote Sens. 2016, 8, 285. [Google Scholar] [CrossRef]
- Cooley, S.; Smith, L.; Stepan, L.; Mascaro, J. Tracking Dynamic Northern Surface Water Changes with High-Frequency Planet CubeSat Imagery. Remote Sens. 2017, 9, 1306. [Google Scholar] [CrossRef]
- Crasto, N.; Hopkinson, C.; Forbes, D.L.; Lesack, L.; Marsh, P.; Spooner, I.; van der Sanden, J.J. A LiDAR-based decision-tree classification of open water surfaces in an Arctic delta. Remote Sens. Environ. 2015, 164, 90–102. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Jelinski, W.; Calmant, S.; Kouraev, A.; Vuglinski, V.; Bergé-Nguyen, M.; Gennero, M.C.; Nino, F.; del Rio, R.A.; Cazenave, A.; et al. SOLS: A lake database to monitor in the Near Real Time water level and storage variations from remote sensing data. Adv. Space Res. 2011, 47, 1497–1507. [Google Scholar] [CrossRef]
- DeLancey, E.R.; Kariyeva, J.; Cranston, J.; Brisco, B. Monitoring Hydro Temporal Variability in Alberta, Canada with Multi-Temporal Sentinel-1 SAR Data. Can. J. Remote Sens. 2018, 44, 1–10. [Google Scholar] [CrossRef]
- Dettermering, D.; Schwatke, C.; Boergens, E.; Seitz, F. Potential of ENVISAT radar altimetry for water level monitoring in the Pantanal Wetland. Remote Sens. 2016, 8, 596. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water Bodies’ Mapping from Sentinel-2 Imagery with Modified Normalized Difference Water Index at 10-m Spatial Resolution Produced by Sharpening the SWIR Band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef]
- Giardino, C.; Bresciani, M.; Valentini, E.; Gasperini, L.; Bolpagni, R.; Brando, V.E. Airborne hyperspectral data to assess suspended particulate matter and aquatic vegetation in a shallow and turbid lake. Remote Sens. Environ. 2015, 157, 48–57. [Google Scholar] [CrossRef]
- Hong, S.-H.; Kim, H.-O.; Wdowinski, S.; Feliciano, E. Evaluation of Polarimetric SAR Decomposition for Classifying Wetland Vegetation Types. Remote Sens. 2015, 7, 8563–8585. [Google Scholar] [CrossRef]
- Hopkinson, C.; Crasto, N.; Marsh, P.; Forbes, D.; Lesack, L. Investigating the spatial distribution of water levels in the Mackenzie Delta using airborne LiDAR. Hydrol. Process. 2011, 25, 2995–3011. [Google Scholar] [CrossRef]
- Krohn, M.D.; Milton, N.M.; Segal, D.B. SEASAT synthetic aperture radar (SAR) response to lowland vegeation types in eastern Maryland and Virginia. J. Geophys. Res. Ocean. 1983, 88, 1937–1952. [Google Scholar] [CrossRef]
- Malinowski, R.; Groom, G.; Schwanghart, W.; Heckrath, G. Detection and Delineation of Localized Flooding from WorldView-2 Multispectral Data. Remote Sens. 2015, 7, 14853–14875. [Google Scholar] [CrossRef]
- Marechal, C.; Pottier, E.; Hubert-Moy, L.; Rapinel, S. One year wetland survey investigations from quad-pol RADARSAT-2 time-series SAR images. Can. J. Remote Sens. 2014, 38, 240–252. [Google Scholar] [CrossRef]
- Morsy, S.; Shaker, A.; El-Rabbany, A. Using Multispectral Airborne LiDAR Data for Land/Water Discrimination: A Case Study at Lake Ontario, Canada. Appl. Sci. 2018, 8, 349. [Google Scholar] [CrossRef]
- Papa, F.; Prigent, C.; Rossow, W.B.; Legresy, B.; Remy, F. Inundated wetland dynamics over boreal regions from remote sensing: The use of Topex-Poseidon dual-frequency radar altimeter observations. Int. J. Remote Sens. 2007, 27, 4847–4866. [Google Scholar] [CrossRef]
- Reschke, J.; Bartsch, A.; Schlaffer, S.; Schepaschenko, D. Capability of C-Band SAR for Operational Wetland Monitoring at High Latitudes. Remote Sens. 2012, 4, 2923–2943. [Google Scholar] [CrossRef]
- Riley, J.W.; Calhoun, D.L.; Barichivich, W.J.; Walls, S.C. Identifying Small Depressional Wetlands and Using a Topographic Position Index to Infer Hydroperiod Regimes for Pond-Breeding Amphibians. Wetlands 2017, 37, 325–338. [Google Scholar] [CrossRef]
- Riordan, B.; Verbyla, D.; McGuire, A.D. Shrinking ponds in subarctic Alaska based on 1950–2002 remotely sensed images. J. Geophys. Res. Biogeosci. 2006, 111, 1–11. [Google Scholar] [CrossRef]
- Sethre, P.R.; Rundquist, B.C.; Todhunter, P.E. Remote Detection of Prairie Pothole Ponds in the Devils Lake Basin, North Dakota. GISci. Remote Sens. 2013, 42, 277–296. [Google Scholar] [CrossRef]
- Torbick, N.; Persson, A.; Olefeldt, D.; Frolking, S.; Salas, W.; Hagen, S.; Crill, P.; Li, C. High Resolution Mapping of Peatland Hydroperiod at a High-Latitude Swedish Mire. Remote Sens. 2012, 4, 1974–1994. [Google Scholar] [CrossRef]
- Frappart, F.; Seyler, F.; Martinez, J.-M.; León, J.G.; Cazenave, A. Floodplain water storage in the Negro River basin estimated from microwave remote sensing of inundation area and water levels. Remote Sens. Environ. 2005, 99, 387–399. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Bourgeau-Chavez, L.L.; Rober, A.R.; Wyatt, K.H.; Waddington, J.M.; Turetsky, M.R. Effects of soil moisture and water depth on ERSSAR backscatter measurements from an Alaskan wetland complex. Remote Sens. Environ. 2009, 113, 1868–1873. [Google Scholar] [CrossRef]
- Kornelsen, K.C.; Coulibaly, P. Advances in soil moisture retrieval from synthetic aperture radar and hydrological applications. J. Hydrol. 2013, 476, 460–489. [Google Scholar] [CrossRef]
- Quinton, W.L.; Hayashi, M.; Pietroniro, A. Connectivity and storage functions of channel fens and flat bogs in northern basins. Hydrol. Process. 2003, 17, 3665–3684. [Google Scholar] [CrossRef]
- Connon, R.F.; Quinton, W.L.; Craig, J.R.; Hanisch, J.; Sonnentag, O. The hydrology of interconnected bog complexes in discontinuous permafrost terrains. Hydrol. Process. 2015, 29, 3831–3847. [Google Scholar] [CrossRef]
- Evans, M.; Lindsay, J. High resolution quantification of gully erosion in upland peatlands at the landscape scale. Earth Surf. Process. Landf. 2010, 35, 876–886. [Google Scholar] [CrossRef]
- Lindsay, J.B. Sensitivity of channel mapping techniques to uncertainty in digital elevation data. Int. J. Geogr. Inf. Sci. 2006, 20, 669–692. [Google Scholar] [CrossRef]
- Lindsay, J.B.; Creed, I.F. Removal of artifact depressions from digital elevation models: Towards a minimum impact approach. Hydrol. Process. 2005, 19, 3113–3126. [Google Scholar] [CrossRef]
- Lindsay, J.B.; Creed, I.F. Distinguishing actual and artefact depressions in digital elevation data. Comput. Geosci. 2006, 32, 1192–1204. [Google Scholar] [CrossRef]
- Töyra, J.; Pietroniro, A.; Hopkinson, C.; Kalbfleisch, W. Assessment of airborne scanning laser altimetry (lidar) in a deltaic wetland environment. Can. J. Remote Sens. 2003, 29, 718–728. [Google Scholar] [CrossRef]
- Detenbeck, N.; Johnston, C.A.; Niemi, G.J. Wetland effects on lake water quality in the Mineapolis/St. Paul Metropolitan area. Landsc. Ecol. 1993, 8, 39–61. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.; Han, X.; Chen, X.; Qi, L. Long-Term Distribution Patterns of Chlorophyll-a Concentration in China’s Largest Freshwater Lake: MERIS Full-Resolution Observations with a Practical Approach. Remote Sens. 2014, 7, 275–299. [Google Scholar] [CrossRef]
- Isenstein, E.M.; Park, M.H. Assessment of nutrient distributions in Lake Champlain using satellite remote sensing. J. Environ. Sci. (China) 2014, 26, 1831–1836. [Google Scholar] [CrossRef]
- Long, C.M.; Pavelsky, T.M. Remote sensing of suspended sediment concentration and hydrologic connectivity in a complex wetland environment. Remote Sens. Environ. 2013, 129, 197–209. [Google Scholar] [CrossRef]
- Mertes, L.A.; Smith, M.O.; Adams, J.B. Estimating suspended sediment concentrations in surface waters of the Amazon River wetlands. Remote Sens. Environ. 1993, 43, 281–301. [Google Scholar] [CrossRef]
- Metternicht, G.I. Fuzzy classification of JERS-1 SAR data: An evaluation of it’s performance for soil salinity mapping. Ecol. Model. 1998, 11, 61–74. [Google Scholar] [CrossRef]
- Newcomer, M.E.; Kuss, A.J.M.; Ketron, T.; Remar, A.; Choksi, V.; Skiles, J.W. Estuarine sediment deposition during wetland restoration: A GIS and remote sensing modeling approach. Geocarto Int. 2013, 29, 451–467. [Google Scholar] [CrossRef]
- Olmanson, L.G.; Brezonik, P.L.; Finlay, J.C.; Bauer, M.E. Comparison of Landsat 8 and Landsat 7 for regional measurements of CDOM and water clarity in lakes. Remote Sens. Environ. 2016, 185, 119–128. [Google Scholar] [CrossRef]
- Sass, G.Z.; Creed, I.F.; Bayley, S.E.; Devito, K.J. Understanding variation in trophic status of lakes on the Boreal Plain: A 20 year retrospective using Landsat TM imagery. Remote Sens. Environ. 2007, 109, 127–141. [Google Scholar] [CrossRef]
- Atkinson, N.; Utting, D.J.; Pawley, S.M.; Trenhaile, A. Landform signature of the Laurentide and Cordilleran ice sheets across Alberta during the last glaciation. Can. J. Earth Sci. 2014, 51, 1067–1083. [Google Scholar] [CrossRef]
- Hansen, M.K.; Brown, D.J.; Dennison, P.E.; Bricklemyer, R.S. Inductively mapping expert-derived soil landscape units within dambo wetland catenae using multispectral and topographic data. Geoderma 2009, 150, 72–84. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Couvillion, B.R.; Holloway, J.M.; Roberts, D.A.; Ustin, S.L.; Peterson, S.H.; Khanna, S.; Piazza, S.C. Spectroscopic remote sensing of the distribution and persistence of oil from the Deepwater Horizon spill in Barataria Bay marshes. Remote Sens. Environ. 2013, 129, 210–230. [Google Scholar] [CrossRef]
- Mars, J.C.; Crowley, J.K. Mapping mine wastes and analyzing areas affected by selenium-rich water runoff in southeast Idaho using AVIRIS imagery and digital elevation data. Remote Sens. Environ. 2003, 84, 422–436. [Google Scholar] [CrossRef]
- Mo, Y.; Kearney, M.S.; Riter, J.C.A. Post-Deepwater Horizon Oil Spill Monitoring of Louisiana Salt Marshes Using Landsat Imagery. Remote Sens. 2017, 9, 547. [Google Scholar] [CrossRef]
- Peterson, S.H.; Roberts, D.A.; Beland, M.; Kokaly, R.F.; Ustin, S.L. Oil detection in the coastal marshes of Louisiana using MESMA applied to band subsets of AVIRIS data. Remote Sens. Environ. 2015, 159, 222–231. [Google Scholar] [CrossRef]
- Myneni, R.B.; Keeling, C.D.; Tucker, C.J.; Asrar, G.; Nemani, R.R. Increased plant growth in the northern high latitudes from 1981–1991. Nature 1997, 386, 698–702. [Google Scholar] [CrossRef]
- Timoney, K. Landscape cover change in the Peace-Athabasca Delta, 1927–2001. Wetlands 2006, 26, 765–778. [Google Scholar] [CrossRef]
- Sass, G.Z.; Creed, I.F. Characterizing hydrodynamics on boreal landscapes using archived synthetic aperture radar imagery. Hydrol. Process. 2008, 22, 1687–1699. [Google Scholar] [CrossRef]
- Montgomery, J.; Brisco, B.; Chasmer, L.; Devito, K.; Cobbaert, D.; Hopkinson, C. SAR and LiDAR temporal data fusion approaches to boreal wetland ecosystem monitoring. Remote Sens. 2019, 11, 161. [Google Scholar] [CrossRef]
- Clark, R.B.; Creed, I.F.; Sass, G.Z. Mapping hydrologically sensitive areas on the Boreal Plain: A multitemporal analysis of ERS synthetic aperture radar data. Int. J. Remote Sens. 2009, 30, 2619–2635. [Google Scholar] [CrossRef]
- Banks, S.; White, L.; Behnamian, A.; Chen, Z.; Montpetit, B.; Brisco, B.; Pasher, J.; Duffe, J. Wetland classification with multi-angle/temporal SAR using random forests. Remote Sens. 2019, 11, 670. [Google Scholar] [CrossRef]
- Brisco, B.; Shelat, Y.; Murnaghan, K.; Montgomery, J.; Fuss, C.; Olthof, I.; Hopkinson, C.; Deschamps, A.; Poncos, V. Evaluation of C-Band SAR for Identification of Flooded Vegetation in Emergency Response Products. Can. J. Remote Sens. 2019, 45, 73–87. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. SAR-based detection of flooded vegetation–a review of characteristics and approaches. Int. J. Remote Sens. 2018, 39, 2255–2293. [Google Scholar] [CrossRef]
- Durden, S.; Haddad, Z.; Morrissey, L.; Livingston, G. Classification of radar imagery over boreal regions for methane exchange studies. Int. J. Remote Sens. 1996, 17, 1267–1273. [Google Scholar] [CrossRef]
- Mahdavi, S.; Salehi, B.; Amani, M.; Granger, J.E.; Brisco, B.; Huang, W.; Hanson, A. Object-Based Classification of Wetlands in Newfoundland and Labrador Using Multi-Temporal PolSAR Data. Can. J. Remote Sens. 2017, 43, 432–450. [Google Scholar] [CrossRef]
- Salehi, B.; Mahdianpari, M.; Amani, M.; Manesh, F.M.; Granger, J.; Mahdavi, S.; Brisco, B. A Collection of Novel Algorithms for Wetland Classification with SAR and Optical Data. In Wetlands Management-Assessing Risk and Sustainable Solutions. IntechOpen 2018. [Google Scholar] [CrossRef]
- Olefeldt, D.; Goswami, S.; Grosse, G.; Hayes, D.; Hugelius, G.; Kuhry, P.; McGuire, A.D.; Romanovsky, V.E.; Sannel, A.B.K.; Schuur, E.A.G.; et al. Circumpolar distribution and carbon storage of thermokarst landscapes. Nat. Commun. 2016, 7, 13043. [Google Scholar] [CrossRef]
- Franklin, S.E.; Ahmed, O.S. Object-based Wetland Characterization Using Radarsat-2 Quad-Polarimetric SAR Data, Landsat-8 OLI Imagery, and Airborne Lidar- Derived Geomorphometric Variables. Photogramm. Eng. Remote Sens. 2017, 83, 27–36. [Google Scholar] [CrossRef]
- Fu, B.; Wang, Y.; Campbell, A.; Li, Y.; Zhang, B.; Yin, S.; Xing, Z.; Jin, X. Comparison of object-based and pixel-based Random Forest algorithm for wetland vegetation mapping using high spatial resolution GF-1 and SAR data. Ecol. Indic. 2017, 73, 105–117. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. Wetland mapping with LiDAR derivatives, SAR polarimetric decompositions, and LiDAR–SAR fusion using a random forest classifier. Can. J. Remote Sens. 2013, 39, 290–307. [Google Scholar] [CrossRef]
- van Beijma, S.; Comber, A.; Lamb, A. Random forest classification of salt marsh vegetation habitats using quad-polarimetric airborne SAR, elevation and optical RS data. Remote Sens. Environ. 2014, 149, 118–129. [Google Scholar] [CrossRef]
- Vanderhoof, M.; Distler, H.; Mendiola, D.A.; Lang, M. Integrating Radarsat-2, Lidar, and Worldview-3 Imagery to maximize detection of forested inundation extent in the Delmarva Peninsula, USA. Remote Sens. 2017, 9, 105. [Google Scholar] [CrossRef]
- Bwangoy, J.-R.B.; Hansen, M.C.; Roy, D.P.; Grandi, G.D.; Justice, C.O. Wetland mapping in the Congo Basin using optical and radar remotely sensed data and derived topographical indices. Remote Sens. Environ. 2010, 114, 73–86. [Google Scholar] [CrossRef]
- Castañeda, C.; Ducrot, D. Land cover mapping of wetland areas in an agricultural landscape using SAR and Landsat imagery. J. Environ. Manag. 2009, 90, 2270–2277. [Google Scholar] [CrossRef]
- Augusteijn, M.F.; Warrender, C.E. Wetland classification using optical and radar data and neural network classification. Int. J. Remote Sens. 1998, 19, 1545–1560. [Google Scholar] [CrossRef]
- Furtado, L.F.D.A.; Silva, T.S.F.; Fernades, P.J.F.; Novo, E.M.L.D.M. Land cover classification of Lago Grande de Curuai floodplain (Amazon, Brazil) using multi-sensor and image fusion techniques. Acta Amaz. 2015, 45, 195–202. [Google Scholar] [CrossRef]
- Gallant, A.; Kaya, S.; White, L.; Brisco, B.; Roth, M.; Sadinski, W.; Rover, J. Detecting emergence, growth, and senescence of wetland vegetation with polarimetric synthetic aperture radar (SAR) data. Water 2014, 6, 694–722. [Google Scholar] [CrossRef]
- Smith, K.; Smith, C.; Forest, S.; Richard, A. A Field Guide to the Wetlands of the Boreal Plains Ecozone of Canada; Report No. 1.0; Ducks Unlimited Canada: Edmonton, AB, Canada, 2007. [Google Scholar]
- Halsey, L.; Vitt, D.; Beilman, D.; Crow, S.; Mahelcic, S.; Wells, R. Alberta Wetland Inventory Standards Version 2.0; Alberta Sustainable Resource Development: Edmonton, AB, Canada, 2003. [Google Scholar]
- Beckingham, J.D.; Archibald, J.H. Field Guide to Ecosites of Northern Alberta; Canadian Forest Service, Northern Forestry Centre: Edmonton, AB, Canada, 1996. [Google Scholar]
- Beckingham, J.D.; Corns, I.G.W.; Archibald, J.H. Field Guide to Ecosites of West-Central ALBERTA; Canadian Forest Service: Edmonton, AB, Canada, 1996. [Google Scholar]
- National Wetlands Working Group. The Canadian Wetland Classification System, 2nd ed.; Warner, B.G., Rubec, C.D.A., Eds.; University of Waterloo, Wetlands Research Centre: Waterloo, ON, Canada, 1997. [Google Scholar]
- Mitsch, W.; Gosselink, J. Wetlands, 5th ed.; John Wiley & Sons, Inc.: Hoboken, NY, USA, 2015. [Google Scholar]
- Alberta Environment and Sustainable Resource Development (ESRD) Government of Alberta (GoA). Alberta Wetland Classification System; Water Policy Branch, Policy and Planning Division: Edmonton, AB, Canada, 2015.
- Group, N.W.W. The Canadian Wetland Classification System, 2nd ed.; Wetlands Research Centre, University of Waterloo: Waterloo, ON, Canada, 1997. [Google Scholar]
- Beckingham, J.D.; Corns, I.G.W.; Archibald, J.H. Field Guide to Ecosites of West-Central Alberta. Natural Resources Canada; Report No. Special Report 9; Natural Resources Canada, Canadian Forest Service: Edmonton, AB, Canada, 1996. [Google Scholar]
- Foody, G.M. Approaches for the production and evaluation of fuzzy land cover classifications from remotely-sensed data. Int. J. Remote Sens. 1996, 17, 1317–1340. [Google Scholar] [CrossRef]
- Government of Alberta—Alberta Environment and Parks (GOA:AEP). Mapping Standards and Guidelines: Mapping Wetlands at an Inventory Scale v1(Draft). Edmonton, AB, USA, Unpublished work. 2020. [Google Scholar]
- Bourgeau-Chavez, L.; Kowalski, K.; Mazur, M.; Scarbrough, K.; Powell, R.; Brooks, C.; Huberty, B.; Jenkins, L.; Banda, E.; Galbraith, D.; et al. Mapping invasive Phragmites australis in the coastal Great Lakes with ALOS PALSAR satellite imagery for decision support. J. Great Lakes Res. 2013, 39, 65–77. [Google Scholar] [CrossRef]
- Mahoney, C.; Hopkinson, C.; Held, A.; Simard, M. Continental-Scale Canopy Height Modeling by Integrating National, Spaceborne, and Airborne LiDAR Data. Can. J. Remote Sens. 2016, 42, 574–590. [Google Scholar] [CrossRef]
- Sandri, M.; Zuccolotto, P. Analysis and correction of bias in Total Decrease in Node Impurity measures for tree-based algorithms. Stat. Comput. 2010, 20, 393–407. [Google Scholar] [CrossRef]
- Behnamian, A.; Banks, S.; White, L.; Brisco, B.; Millard, K.; Pasher, J.; Chen, Z.; Duffe, J.; Bourgeau-Chavez, L.; Battaglia, M. Semi-Automated Surface Water Detection with Synthetic Aperture Radar Data: A Wetland Case Study. Remote Sens. 2017, 9, 1209. [Google Scholar] [CrossRef]
- Pande-Chhetri, R.; Abd-Elrahman, A.; Liu, T.; Morton, J.; Wilhelm, V.L. Object-based classification of wetland vegetation using very high-resolution unmanned air system imagery. Eur. J. Remote Sens. 2017, 50, 564–576. [Google Scholar] [CrossRef]
- Zhang, M.; Zeng, Y.; Huang, W.; Li, S. Combining spatiotemporal fusion and object-based image analysis for improving wetland mapping in complex and heterogeneous urban landscapes. Geocarto Int. 2018, 34, 1144–1161. [Google Scholar] [CrossRef]
- Govender, M.; Chetty, K.; Bulcock, H.A. A review of hyperspectral remote sensing and its application in vegetation and water resource studies. Water SA 2007, 33, 145–151. [Google Scholar] [CrossRef]
- Adam, E.; Mutanga, O.; Rugege, D. Multispectral and hyperspectral remote sensing for identification and mapping of wetland vegetation: A review. Wetl. Ecol. Manag. 2010, 18, 281–296. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Motagh, M. Random forest wetland classification using ALOS-2 L-band, RADARSAT-2 C-band, and TerraSAR-X imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 13–31. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Mahoney, C.; Hall, R.; Hopkinson, C.; Filiatrault, M.; Beaudoin, A.; Chen, Q. A Forest Attribute Mapping Framework: A Pilot Study in a Northern Boreal Forest, Northwest Territories, Canada. Remote Sens. 2018, 10, 1338. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. Quantifying the relative contributions of vegetation and soil moisture conditions to polarimetric C-Band SAR response in a temperate peatland. Remote Sens. Environ. 2018, 206, 123–138. [Google Scholar] [CrossRef]
- Devito, K.; Creed, I.; Gan, T.; Mendoza, C.; Petrone, R.; Silins, U.; Smerdon, B. A framework for broad-scale classification of hydrologic response units on the Boreal Plain: Is topography the last thing to consider? Hydrol. Process. 2005, 19, 1705–1714. [Google Scholar] [CrossRef]
- Holling, C.S. Resilience and stability of ecological systems. Annu. Rev. Ecol. Syst. 1973, 4, 1–23. [Google Scholar] [CrossRef]
- Wells, C.; Ketcheson, S.; Price, J.S. Hydrology of a wetland-dominated headwater basin in the Boreal Plain, Alberta, Canada. J. Hydrol. 2017, 547, 168–183. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; Smith, K.B.; Brunzell, S.M.; Kasischke, E.S.; Romanowicz, E.A.; Richardson, C.J. Remote monitoring of regional inundation patterns and hydroperiod in the Greater Everglades using Synthetic Aperture Radar. Wetlands 2005, 25, 176–191. [Google Scholar] [CrossRef]
- Lang, M.W.; Kasischke, E.S.; Prince, S.D.; Pittman, K.W. Assessment of C-band synthetic aperture radar data for mapping and monitoring Coastal Plain forested wetlands in the Mid-Atlantic Region, USA. Remote Sens. Environ. 2008, 112, 4120. [Google Scholar] [CrossRef]
- Baldassarre, G.; Schumann, G.; Brandimarte, L.; Bates, P. Timely low resolution SAR imagery to support floodplain modeling: A case study review. Surv. Geophys. 2011, 32, 255–269. [Google Scholar] [CrossRef]
- Brisco, B. Mapping and Monitoring Surface Water and Wetlands with Synthetic Aperture Radar. In Remote Sensing of Wetlands: Applications and Advances; Tiner, R.W., Lang, M.W., Klemas, V.V., Eds.; Chapter 7; CRC Press: Boca Raton, FL, USA, 2015; ISBN1 978-1-4822-3735-1. ISBN2 978-1-4822-3738-2. [Google Scholar]
- Brisco, B.; Kapfer, M.; Hirose, T.; Tedford, B.; Liu, J. Evaluation of C-band polarization diversity and polarimetry for wetland mapping. Can. J. Remote Sens. 2011, 37, 82–92. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; LeToan, T.; Beaudoin, A.; Kasischke, E.S.; Christensen, N. Dependence of radar backscatter on coniferous forest biomass. IEEE Trans. Geosci. Remote Sens. 1992, 30, 412–415. [Google Scholar] [CrossRef]
- Klemas, V. Remote sensing of emergent and submerged wetlands: An overview. Int. J. Remote Sens. 2013, 34, 6286–6320. [Google Scholar] [CrossRef]
- Dabboor, M.; Brisco, B. Wetland Monitoring and Mapping using Synthetic Aperture Radar in Wetlands Management—Assessing Risk and Sustainable Solutions. IntechOpen 2018, 1, 61–86. [Google Scholar]
- Vitt, D.H.; van Wirdum, G.; Zoltai, S.C.; Halsey, L.A. Habitat requirements of Scorpidium scorpiodes and fen development in continental Canada. Bryologist 1993, 96, 106–111. [Google Scholar] [CrossRef]
- Stewart, R.; Kantrud, H. Classification of Natural Ponds and Lakes in the Glaciated Prairie Region; US Bureau of Sport Fisheries and Wildlife: Washington, DC, USA, 1971. [Google Scholar]
- Alberta Environment and Sustainable Resource Development. In Alberta Wetland Classification System; Environment and Sustainable Resource Development: Edmonton, AB, Canada, 2015.
- Baghdadi, N.; Choker, M.; Zribi, M.; Hajj, M.; Paloscia, S.; Verhoest, N.; Lievens, H.; Baup, F.; Mattia, F. A New Empirical Model for Radar Scattering from Bare Soil Surfaces. Remote Sens. 2016, 8, 920. [Google Scholar] [CrossRef]
- Wang, Y. Seasonal change in the extent of inundation on floodplains detected by JERS-1 Synthetic Aperture Radar data. Int. J. Remote Sens. 2004, 25, 2497–2508. [Google Scholar] [CrossRef]
- Zhang, C.; Selch, D.; Cooper, H. A framework to combine three remotely sensed data sources for vegetation mapping in the central Florida Everglades. Wetlands 2016, 36, 201–213. [Google Scholar] [CrossRef]
- Zribi, M.; Gorrab, A.; Baghdadi, N.; Lili-Chabaane, Z.; Mougenot, B. Influence of radar frequency on the relationship between bare surface soil moisture vertical profile and radar backscatter. IEEE Geosci. Remote Sens. Lett. IEEE Inst. Electr. 2013, 11, 848–885. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; Kasischke, E.S.; Riordan, K.; Brunzell, S.; Nolan, M.; Hyer, E.; Slawski, J.; Medvecz, M.; Walters, T.; Ames, S. Remote monitoring of spatial and temporal surface soil moisture in fire disturbed boreal forest ecosystems with ERS SAR imagery. Int. J. Remote Sens. 2007, 28, 2133–2162. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; Kasischke, E.S.; Rutherford, M.D. Evaluation of ERS SAR data for prediction of fire danger in a boreal region. Int. J. Wildland Fire 1999, 9, 183–194. [Google Scholar] [CrossRef]
- Jacome, A.; Bernier, M.; Chokmani, K.; Gauthier, Y.; Poulin, J.; de Sève, D. Monitoring volumetric surface soil moisture content at the La Grande basin boreal wetland by radar multi polarization data. Remote Sens. 2013, 5, 4919–4941. [Google Scholar] [CrossRef]
- Millard, K.; Thompson, D.; Parisien, M.A.; Richardson, M. Soil moisture monitoring in a temperate peatland using multi-sensor remote sensing and linear mixed effects. Remote Sens. 2018, 10, 903. [Google Scholar] [CrossRef]
- Al-Yaari, A.; Wigneron, J.P.; Kerr, Y.; Rodriguez-Fernandez, N.; O’Neill, P.E.; Jackson, T.J.; de Lannoy, G.J.M.; al Bitar, A.; Mialon, A.; Richaume, P.; et al. Evaluating soil moisture retrievals from ESA’s SMOS and NASA’s SMAP brightness temperature datasets. Remote Sens. Environ. 2017, 193, 257–273. [Google Scholar] [CrossRef] [PubMed]
- Derksen, C.; Xu, X.; Dunbar, R.S.; Colliander, A.; Kim, Y.; Kimball, J.S.; Black, T.A.; Euskirchen, E.; Langlois, A.; Loranty, M.M.; et al. Retrieving landscape freeze/thaw state from Soil Moisture Active Passive (SMAP) radar and radiometer measurements. Remote Sens. Environ. 2017, 194, 48–62. [Google Scholar] [CrossRef]
- Garroway, K.; Hopkinson, C.; Jamieson, R. Surface moisture and vegetation influences on lidar intensity data in an agricultural watershed. Can. J. Remote Sens. 2011, 37, 275–284. [Google Scholar] [CrossRef]
- Peters, D.L.; Caissie, D.; Monk, W.A.; Rood, S.B.; St-Hilaire, A. An ecological perspective on floods in Canada. Can. Water Resour. J. Rev. Can. Ressour. Hydr. 2016, 41, 288–306. [Google Scholar] [CrossRef]
- Price, J.S.; Branfireun, B.A.; Michael Waddington, J.; Devito, K.J. Advances in Canadian wetland hydrology, 1999–2003. Hydrol. Process. 2005, 19, 201–214. [Google Scholar] [CrossRef]
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology/Un modèle à base physique de zone d’appel variable de l’hydrologie du bassin versant. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef]
- Buttle, J.M.; Dillon, P.J.; Eerkes, G.R. Hydrologic coupling of slopes, riparian zones and streams: An example from the Canadian Shield. J. Hydrol. 2004, 287, 161–177. [Google Scholar] [CrossRef]
- Ferone, J.M.; Devito, K.J. Shallow groundwater-surface water interactions in pond-peatland complexes along a Boreal Plains topographic gradient. J. Hydrol. 2004, 292, 75–95. [Google Scholar] [CrossRef]
- Heidemann, H.K. Lidar base specification (ver. 1.3, February 2018). In U.S. Geological Survey Techniques and Methods; Book 11, Chapter B4; 2018; p. 101. Available online: https://www.ipcc-nggip.iges.or.jp/public/2006gl/vol4.html (accessed on 22 February 2020).
- Richardson, M.C.; Mitchell, C.P.; Branfireun, B.A.; Kolka, R.K. Analysis of airborne LiDAR surveys to quantify the characteristic morphologies of northern forested wetlands. J. Geophys. Res. Biogeosci. 2010, 115. [Google Scholar] [CrossRef]
- Cheng, K.S.; Lei, T.C. Reservoir trophic state evaluation using Landsat TM images. J. Am. Water Resour. Assoc. 2001, 37, 1321–1334. [Google Scholar] [CrossRef]
- Markogianni, V.; Kalivas, D.; Petropoulos, G.; Dimitriou, E. An Appraisal of the Potential of Landsat 8 in Estimating Chlorophyll-a, Ammonium Concentrations and Other Water Quality Indicators. Remote Sens. 2018, 10, 1018. [Google Scholar] [CrossRef]
- Phillips, T.; Petrone, R.M.; Wells, C.M.; Price, J.S. Characterizing dominant controls governing evapotranspiration within a natural saline fen in the Athabasca Oil Sands of Alberta, Canada. Ecohydrology 2016, 9, 817–829. [Google Scholar] [CrossRef]
- Gibson, J.J.; Fennell, J.; Birks, S.J.; Yi, Y.; Moncur, M.C.; Hansen, B.; Jasechko, S. Evidence of discharging saline formation water to the Athabasca River in the oil sands mining region, northern Alberta. Can. J. Earth Sci. 2013, 50, 1244–1257. [Google Scholar] [CrossRef]
- Joosten, H.; Sirin, A.; Couwenberg, J.; Laine, J.; Smith, P. The role of peatlands in climate regulation. In Peatland Restoration and Ecosystem Services; Bonn, A., Allott, T., Evans, M., Joosten, H., Stoneman, R., Eds.; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Intergovernmental Panel on Climate Change. Guidelines for National Greenhouse Gas Inventories Volume 4 Agriculture, Forestry and other Land Uses; Ch 7 Wetlands. 2006. Available online: https://www.ipcc-nggip.iges.or.jp/public/2006gl/vol4.html (accessed on 22 February 2020).
- Bona, K.A.; Fyles, J.W.; Shaw, C.; Kurz, W.A. Are mosses required to accurately predict upland black spruce forest soil carbon in national-scale forest C accounting models? Ecosystems 2013, 16, 1071–1086. [Google Scholar] [CrossRef]
- Kurz, W.A.; Hayne, S.; Fellows, M.; MacDonald, J.D.; Metsaranta, J.M.; Hafer, M.; Blain, D. Quantifying the impacts of human activities on reported greenhouse gas emissions and removals in Canada’s managed forest: Conceptual framework and implementation. Can. J. For. Res. 2018, 48, 1227–1240. [Google Scholar] [CrossRef]
- Kurz, W.A.; Shaw, C.H.; Boisvenue, C.; Stinson, G.; Metsaranta, J.; Leckie, D.; Dyk, A.; Smyth, C.; Neilson, E.T. Carbon in Canada’s boreal forest—A synthesis. Environ. Rev. 2013, 21, 260–292. [Google Scholar] [CrossRef]
- Metsaranta, J.M.; Shaw, C.H.; Kurz, W.A.; Boisvenue, C.; Morken, S. Uncertainty of inventory-based estimates of the carbon dynamics of Canada’s managed forest (1990–2014). Can. J. For. Res. 2017, 47, 1082–1094. [Google Scholar] [CrossRef]
- Emerald City Comic Con. National Inventory Report 1990–2015: Greenhouse Gas Sources and Sinks in Canada; Consulted on 3 June 2019. 2017. Available online: https://www.canada.ca/en/environment-climate-change/services/climate-change/greenhouse-gas-emissions/sources-sinks-executive-summary-2019.html (accessed on 22 February 2020).
- Crooks, S.; Sutton-Grier, A.E.; Troxler, T.G.; Herold, N.; Bernal, B.; Schile-Beers, L.; Wirth, T. Coastal wetland management as a contribution to the US National Greenhouse Gas Inventory. Nat. Clim. Chang. 2018, 8, 1109. [Google Scholar] [CrossRef]
- Edwards, P.; Abivardi, C. The value of biodiversity: Where ecology and economy blend. Biol. Conserv. 1998, 83, 239–246. [Google Scholar] [CrossRef]
- Baldocchi, D. Measuring fluxes of trace gases and energy between ecosystems and the atmosphere—The state and future of the eddy covariance method. Glob. Chang. Biol. 2014, 20, 3600–3609. [Google Scholar] [CrossRef] [PubMed]
- Kljun, N.; Calanca, P.; Rotach, M.W.; Schmid, H.P. A simple two-dimensional parameterisation for Flux Footprint Prediction (FFP). Geosci. Model Dev. 2015, 8, 3695–3713. [Google Scholar] [CrossRef]
- Gamon, J.A.; Filella, I.; Penuelas, J.E. The dynamic 531-nanometer reflectance signal: A survey of twenty angiosperm species. In Photosynthetic Responses to the Environment; American Society of Plant Physiologists: Rockville, MD, USA, 1993. [Google Scholar]
- Gamon, J.A.; Penuelas, J.; Field, C.B. A narrow-waveband spectral index that tracks diurnal changes in photosynthetic efficiency. Remote Sens. Environ. 1992, 41, 35–44. [Google Scholar] [CrossRef]
- Hilker, T.; Hall, F.G.; Coops, N.C.; Lyapustin, A.; Wang, Y.; Nesic, Z.; Grant, N.; Black, T.A.; Wulder, M.A.; Kljun, N.; et al. Remote sensing of photosynthetic light-use efficiency across two forested biomes: Spatial scaling. Remote Sens. Environ. 2010, 114, 2863–2874. [Google Scholar] [CrossRef]
- Cook, B.D.; Bolstad, P.V.; Næsset, E.; Anderson, R.S.; Garrigues, S.; Morisette, J.T.; Nickeson, J.; Davis, K.J. Using LiDAR and quickbird data to model plant production and quantify uncertainties associated with wetland detection and land cover generalizations. Remote Sens. Environ. 2009, 113, 2366–2379. [Google Scholar] [CrossRef]
- Wulder, M.; Li, Z.; Campbell, E.; White, J.; Hobart, G.; Hermosilla, T.; Coops, N. A National Assessment of Wetland Status and Trends for Canada’s Forested Ecosystems Using 33 Years of Earth Observation Satellite Data. Remote Sens. 2018, 10, 1623. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ramsar Process | Applications of Interest | Derivative Products | Description | Remote Sensing Systems | References |
|---|---|---|---|---|---|
| Wetland extent | Landcover | Landcover class | General land cover classes, where wetlands are one of many land cover classes characterised by remotely sensed data | Air photos, MIVIS, AVIRIS, Hyperion, Worldview, Quickbird, IKONOS, KOMPSAT, SPOT, Sentinel-2, Landsat, MODIS, AVHRR, RADARSAT, MERIS, NISAR, Sentinel-1, JERS, PALSAR, ERS 1, 2, SIR, Lidar | [6,12,15,36,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77] |
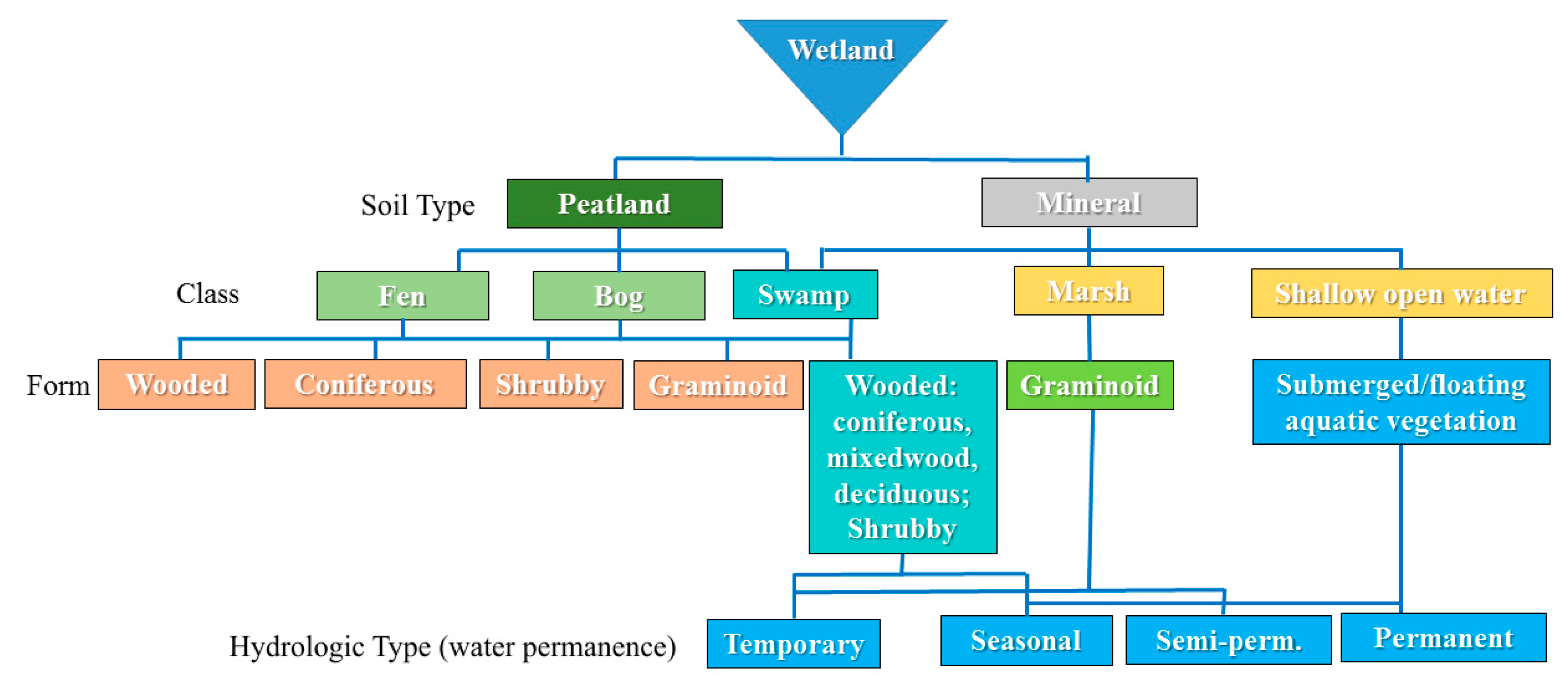
| Wetland class | Wetland class (e.g., Bog, Fen, Swamp, Marsh, Shallow open water) Wetland form structure including graminoid, shrubby, treed Wetland edge detection | More specific use of remote sensing data for classifying wetland class, physiognomic vegetation form, and accuracy of extent, including wetland edge detection | Air photos, Hymap, CASI, Worldview, Pleiades, Quickbird, IKONOS, RapidEye, SPOT, Landsat, MODIS, RADARSAT, PALSAR, ERS 1, 2, SeaSat SIR, Lidar | [7,10,11,19,35,36,38,40,41,42,47,50,57,63,70,72,76,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95,96,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111,112,113,114] | |
| Vegetation species | Tree/shrub/graminoid (etc.) species identification; invasive species Moss/ground cover identification | Identification of vegetation species and ground covers, variability, and extent | Air photo, PROBE, MIVIS, ROSIS, Hymap, CASI, AVIRIS, Hyperion, Worldview, Quickbird, IKONOS, SPOT, Sentinel-2, Landsat, TerraSAR-X, Lidar | [9,10,11,15,16,19,41,43,44,60,69,70,72,76,82,102,103,104,105,106,107,108,109,110,112,113,114,115,116,117,118,119,120,121,122,123,124,125,126,127,128,129,130,131,132,133,134,135,136,137,138,139,140,141] | |
| Ecosystem change | Ecosystem change Restoration Reclamation | Change of wetland ecosystems over time, including expansion and contraction of wetland land covers, changes in species. Requires accuracy standards for wetland class to determine accuracy of wetland change | Airphotos, Quickbird, IKONOS, SPOT, Landsat, MODIS, AVHRR, Lidar | [12,19,44,71,142,143,144,145,146,147,148,149,150,151,152,153,154,155] | |
| Biological Productivity | Ecosystem productivity | Productivity, biomass Carbon and methane Foliage biogeo-chemistry | Indicators of vegetation productivity, vegetation indices; Leaf biogeochemistry (e.g., N) often measured using hyperspectral remote sensing | Hymap, CASI, Hyperion, Worldview, Rapideye, Sentinel-2, Landsat, MODIS, MERIS, Sentinel-1, SMAP, Lidar | [21,134,146,154,156,157,158,159,160,161,162,163,164,165,166,167,168] |
| Vegetation structure | Vegetation structure Friction Stress | Measurement of structural and foliage attributes of vegetation; Frictional components of land and vegetation for flood extent mapping and air movement; Variations in structure associated with stress | AVIRIS, IKONOS, Landsat, MODIS, Lidar | [21,26,112,128,169,170,171] | |
| Habitat | Fauna Insect | Habitat characterisation for fauna and insects | Air photo, GeoSAT, IKONOS, Landsat, MODIS, Lidar | [72,130,131,155,160,172,173,174,175] | |
| Wildfire effects | Fire impacts Loss of biomass Fire severity | Post-fire ecosystem changes, burn severity often determined from spectral burn indices, lidar | IKONOS, Sentinel-1, 2, Landsat, RADARSAT, Lidar | [73,147,176] | |
| Hydrological regime/water cycling | Water flux | Evapo-transpiration | Modelling water losses often based on structure/leaf area; measurement using thermal infrared imagery | Landsat, MODIS, AVHRR | [50,148,171,177,178,179] |
| Water extent/level | Water extent Water level Bathymetry | Water extent can be used to determine water level with an accurate DEM, and hydroperiod; Bathymetry determined from bathymetric lidar | Air photo, Quickbird, Cubesat (etc.), RapidEye, SPOT, Landsat, Sentinel-2, Sentinel-1, RADARSAT, JERS, ENVISAT, Palsar, SeaSat, SIR, GeoSat, Jason, Lidar | [8,9,20,22,23,36,39,44,75,91,93,118,124,144,162,174,180,181,182,183,184,185,186,187,188,189,190,191,192,193,194,195,196,197,198,199,200,201,202,203] | |
| Soil moisture/ water table | Soil moisture Position of the water table Hydraulic gradient | Surface soil moisture, saturation associated with water table at the ground surface, and estimates of hydrological gradient between saturated surfaces | SASI, CASI, ASTER, ERS-1,2, SMAP, Lidar | [93,126,178,204,205,206,207] | |
| Topography | Topographic variability Wetland connectivity Erosion | Local topographic variations influencing distribution of soil moisture, vegetation species, structures, hydroperiod, contributing basin area, wetland hydrological connectivity, and water/nutrient flows | Worldview, Lidar | [26,27,128,155,207,208,209,210,211,212,213] | |
| Biogeochemical processes | Water chemistry/turbidity | Trophic status Suspended sediment Turbidity/Secchi disk depth Salinity | Spectral reflection/absorption of water column constituents; Spectral indicators of saline soil surfaces | Air photos, MIVIS, Sentinel-2, Landsat, MODIS, MERIS, JERS-1 | [124,154,191,214,215,216,217,218,219,220,221,222] |
| Surface geology/soils | Surface geology Soils | Distribution of surface geological formations often based on DEM textural attributes and/or spectral characteristics of bare soils/rock | MIVIS, Lidar | [223,224] | |
| Mine spill detection | Oil spill detection Contaminants | Overland flow of oil spills and contaminants measured using optical/hyperspectral remote sensing | Air photos, AVIRIS, SPOT, Landsat | [152,225,226,227,228] | |
| Climate Change | Climate forcing | Wetland class change | Broad area wetland class or characteristics (e.g., albedo) and implications for climate change | MODIS | [143,145,149,170,229] |
| Sensor Type | Sensor | Average Accuracy (%) | Standard Deviation Accuracy (%) | Applications | Number of Data to Field Comparisons |
|---|---|---|---|---|---|
| Photo | Aerial photography | 80.5 | 21.6 | Land cover class Wetland class Vegetation Species Water extent Water quality | 2 3 1 1 1 |
| Hyperspectral | MIVIS | 86.5 | 12.1 | Landcover class Vegetation Species Trophic status Bathymetry | 1 1 1 1 |
| Hymap | 76.0 | 27.8 | Wetland class Vegetation Species | 1 7 | |
| CASI | 90.2 | 7.6 | Wetland class Vegetation Species Chlorophyll-a | 1 3 2 | |
| AVIRIS | 85.5 | 9.7 | Landcover class Vegetation Species Oil spill detection | 1 2 4 | |
| Hyperion | 54.9 | 26.9 | Landcover class Vegetation Species Productivity Habitat Nitrogen | 1 1 1 1 1 | |
| Satellite Multi-spectral | WorldView Series | 80.0 | 17.6 | Landcover class Wetland class Vegetation Species Productivity | 1 4 1 1 |
| Pleiades | 86.2 | 3.4 | Wetland class Landcover class Wetland class | 5 * 1 2 | |
| Quickbird | 73.7 | 13.9 | Vegetation Species Change Water extent | 5 2 1 | |
| IKONOS | 78.8 | 14.3 | Land cover class Wetland class Vegetation Species Productivity Habitat | 2 2 7 1 2 | |
| RapidEye | 88.0 | 9.1 | Wetland class Water extent Productivity | 5 3 1 | |
| SPOT | 77.0 | 21.9 | Landcover class Wetland class Vegetation Species Change | 1 2 3 1 | |
| Sentinel-2 | 86.6 | 11.8 | Landcover class Vegetation Species Water extent Productivity Trophic status | 1 1 4 1 2 | |
| Landsat TM | 74.0 | 23.0 | Landcover class Wetland class Water extent Productivity Chlorophyll-a Water turbidity Vegetation structure Habitat | 1 5 3 2 1 2 2 1 | |
| Landsat ETM+ | 71.5 | 10.8 | Productivity Trophic status | 1 3 | |
| Landsat OLI | 74.1 | 13.0 | Wetland class Vegetation Species Productivity Trophic status | 1 1 1 3 | |
| MODIS | 54.9 | 32.7 | Landcover class Wetland class Turbidity Productivity Water flux modelling | 1 1 1 3 1 | |
| AVHRR | 58.0 | 36.6 | Landcover class Water flux modelling | 2 1 | |
| Synthetic Aperture Radar | MERIS | 77.4 | 7.5 | Landcover class Chlorophyll-a Trophic status | 2 1 3 |
| TerraSAR-X | 88.3 | 9.4 | Vegetation species Water extent | 1 1 | |
| Sentinel-1 | 93.4 | 2.9 | Landcover class Water extent | 1 2 | |
| RADARSAT-2 | 86.7 | 6.3 | Wetland class Water extent | 4 3 | |
| JERS-1 | 80.1 | 12.3 | Landcover class Water extent Water salinity | 1 2 1 | |
| ENVISAT ASAR | 73.1 | 33.6 | Water extent | 4 | |
| RADARSAT-1 | 67.7 | 8.3 | Landcover class Wetland class | 2 3 | |
| ALOS PALSAR | 67.3 | 19.7 | Landcover class Wetland class Water extent | 3 2 1 | |
| ERS-1 | 66.0 | 15.2 | Wetland class Soil moisture | 2 * 2 * | |
| SMAP | 70.1 | 23.4 | Productivity Soil moisture/temperature | 2 4 + 2 * | |
| SIR-A | 67.5 | 17.5 | Landcover class Wetland class Water extent | 1 2 1 | |
| Jason Series | 97.5 | 2.2 | Water extent | 3 | |
| Lidar | Airborne lidar | 74.3 | 15.7 | Wetland class Change Water extent Wildland fire Habitat Vegetation structure Elevation | 2 1 3 1 1 5 6 |
| Airborne multi-spectral lidar | 84.6 | 10.6 | Vegetation species Water extent Structure | 2 1 1 |
| Agency | Application * Ramsar Convention | Minimum Mapping Unit Feasibility (Sensor) | Potential Frequency of Remotely Sensed Data Collection Per Application | Comments |
|---|---|---|---|---|
| Federal | * Wetland classification/extent | 0.36 ha (Landsat) | Decadal or less | Optimal long time series National time series mapping, change detection from 1982, providing long temporal history, data consistency, national composite time series moving to annual periods using spectral vegetation indices (SVIs) due to advances in computing. Cloud cover is problematic |
| 0.04 ha (Sentinel-2) | ~3 years or less | Optimal spatial resolution considering availability and ease of use National time series mapping change detection along boundaries at current rates. Advances in computing will increase temporal resolution. Future of national-level wetland mapping/monitoring. | ||
| * Wetland productivity (carbon accounting via UNFCCC) | 400 ha (AVHRR) | Weekly/bi-weekly trends; phenology | Magnitude and directionality of trends per pixel based on spectral vegetation indices indicate cumulative changes across mixed land cover types. Long time series. | |
| 100 ha (MODIS) | Weekly/bi-weekly trends; phenology | Same as for AVHRR. Finer pixel resolution. Influence of wetlands on spectral signal depends on spatial frequency. Thermal infrared channel and narrow bands show promise for climate forcing | ||
| 0.36 ha (Landsat) | Decadal or less | Optimal long time series Long time series, however, should ensure that annual cumulative productivity is observed at maximum foliage cover each year | ||
| 0.04 ha (Sentinel-2) | Weekly/bi-weekly | Optimal, feasible across key areas: future computing power will increase national feasibility | ||
| Wildfire | 0.36 ha (Landsat + observation) | Weekly | Operational wildfire reporting based on Landsat optical + thermal imagery (hot spot detection) | |
| 0.04 ha (Sentinel-2) | ~3 years or less | Pre-fire fuels and post-fire burn severity mapping; does not include thermal band | ||
| Surface geology | 0.004 ha (Lidar) | Baseline | Optimal, feasible for local assessment | |
| 3.24 ha in northern ecosystems (SRTM/ASTER) | Baseline | Sub-optimal due to variability of surface geology and landforms. Currently best available. | ||
| * Soil moisture | 0.12 ha (SMAP) | Weekly | Low resolution, but currently best available. SWOT will improve soil moisture products | |
| Provincial | * Wetland classification/extent change (monitoring) | 0.36 ha (Landsat) | Decadal or less; phenology-dependent | Optimal long time series, does not easily detect wetland edges |
| 0.04 ha (Sentinel-2) | ~3 years or less; phenology-dependent | Optimal band discrimination: Improved edge detection, can increase frequency of use for change detection, many bands = greater ability to detect wetlands than Landsat | ||
| 0.0004–0.002 ha (SPOT) | Decadal | Optimal long time series, low band discrimination: Variable high spatial resolution, national coverage, however few spectral bands increase uncertainty of classification | ||
| 0.00014 ha (Worldview) | Optimal band discrimination, high resolution: Data are expensive to acquire | |||
| 0.0004 ha (Air photo) | Baseline | Optimal resolution, not feasible: Manual delineation is very time consuming | ||
| 0.0004 (Lidar + hyperspectral) | Inter-annual at max. foliage | Optimal, not feasible due to limited area coverage with the exception for of monitoring small/sensitive areas. Class and type discrimination + topography + structure | ||
| * Water extent/level | 0.0256–4 ha (RADARSAT-2, RCM) | Monthly | Mapping of flood extents. RCM data will be free increasing feasibility of product. Cloud cover is not an issue | |
| 0.0049–0.64 ha (Sentinel-1) | Bi-Weekly | Optimal, possibly feasible (computing). Cloud cover is not an issue | ||
| Surface geology | 0.004 ha (Lidar) | Baseline | Optimal, feasible, costly: high-resolution 3D ground surface features beneath tree canopies. | |
| Municipal | * Wetland extent/classification Change | 0.0004 ha (Air photo) | Monitoring phenology-dependent | Optimal: Municipal areas relatively small; air photo delineation is fairly simple. Low cost. |
| 0.0004 ha (Lidar) | Baseline/monitoring | Possibly Optimal: Many applications and benefits beyond wetland mapping. High accuracy | ||
| * Water extent/level | 0.0256–4 ha (RADARSAT-2, RCM) | Monthly | Mapping of flood extents. RCM data will be free increasing feasibility of product | |
| 0.0049–0.64 ha (Sentinel-1) | Bi-Weekly | Optimal: Online processing improves accessibility of data for non-experts | ||
| * Vegetation structure | 0.0004 ha (Lidar) | Baseline/Monitoring at max foliage | Optimal for full medium to large wetlands: can be costly, requires user expertise. Best accuracy | |
| 0.000005 ha (UAV SfM) | Monitoring | Optimal for plot-level application/monitoring: requires significant user skill, licensing, inexpensive, high density for objects in line of sight, unable to detect ground if not observed | ||
| Wildfire monitoring | 0.36 ha (Landsat + observation) | Weekly | Operational wildfire reporting based on Landsat optical + thermal imagery (hot spot detection), low spatial resolution | |
| 0.04 ha (Sentinel-2) | ~3 years or less | Pre-fire fuels and post-fire burn severity mapping, does not include thermal band, moderate spatial resolution | ||
| 0.0004 ha (Lidar) | Baseline/monitoring | Optimal for fuel load mapping/modelling: may not be feasible (depends on budget) | ||
| Industrial/NGO | Ecosystem condition/change for impacts assessment and reclamation AND * Species | 0.0009–0.0064 ha (High-resolution multi-spectral) | Monitoring; Annual—3 years at max foliage | Sub-optimal for species/biogeochemistry compared with hyperspectral, less expensive, increases feasibility. Spatial, spectral, and temporal resolution need to be considered depending on use, e.g., Worldview optimal for wetland condition, sub-optimal for time series analysis + cost, IKONOS optimal for wetland change, time series analysis, sub-optimal for wetland condition, etc. |
| 0.000005 ha (UAV optical, SfM) | Monitoring | Optimal for plot-level application/monitoring: requires significant user skill, licensing, inexpensive, high density for objects in line of sight, unable to detect ground if not observed | ||
| 0.00005–0.003ha (Hyperspectral) | Baseline or monitoring | Optimal depending on band/pixel/time series requirements, costly: Ability to discriminate different species, biogeochemistry, condition at snapshot in time. Regional-scale application | ||
| * Vegetation structure | 0.0004 ha (Lidar) | Baseline/Monitoringat max foliage | Optimal for full medium to large wetlands: can be costly, requires user expertise. Best accuracy. Greater finances = increased feasibility | |
| 0.000005 ha (UAV SfM) | Monitoring | Optimal for plot-level application/monitoring: requires significant user skill, licensing, inexpensive, high density for objects in line of sight, unable to detect ground if not observed | ||
| Mine spill detection | 0.1156 ha (AVIRIS) | Baseline/monitoring | Feasible in coastal/non-treed environments: Development of hyperspectral and lidar systems are ongoing. | |
| Varies (Laser fluorosensors) | Baseline/monitoring | Optimal: Costly but highly accurate required for remediation. | ||
| * Biogeochemistry | 0.00005–0.003 ha (Hyperspectral) | Baseline/monitoring | Optimal, costly: Ability to discriminate water column chemistry at high resolution, including turbidity at snapshot in time. Regional-scale application | |
| Topography | 0.0004 ha (Lidar) | Baseline/monitoring for cut-fill | Optimal for undisturbed forest/wetland ecosystem mining and reclamation, costly: Accurate measurement of ground topography beneath vegetation for mining, volume | |
| 0.000005 ha (UAV SfM) | Pre-/post disturbance | Optimal for small area application/monitoring in unvegetated environments/mine sites. Inexpensive, easy to operate, though requires significant licensing. Methods are developing rapidly | ||
| Surface geology | 0.0004 ha (Lidar) | Baseline | Optimal for mapping surface features beneath vegetation canopies at high resolution, costly | |
| Soils | 0.00005–0.003 ha (Hyperspectral) | Baseline | Optimal, costly: Can be compared with spectral reflectance/absorption tables for soil types in un-vegetated areas | |
| Soil moisture | 0.0256–4 ha (RADARSAT2, RCM) | Monthly | Mapping potential for flooding, changes in hydrology due to disturbance. RCM data will be free increasing feasibility of product | |
| 0.0049–0.64 ha (Sentinel-1) | Bi-Weekly | Optimal: Online processing improves accessibility of data for non-experts |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chasmer, L.; Cobbaert, D.; Mahoney, C.; Millard, K.; Peters, D.; Devito, K.; Brisco, B.; Hopkinson, C.; Merchant, M.; Montgomery, J.; et al. Remote Sensing of Boreal Wetlands 1: Data Use for Policy and Management. Remote Sens. 2020, 12, 1320. https://doi.org/10.3390/rs12081320
Chasmer L, Cobbaert D, Mahoney C, Millard K, Peters D, Devito K, Brisco B, Hopkinson C, Merchant M, Montgomery J, et al. Remote Sensing of Boreal Wetlands 1: Data Use for Policy and Management. Remote Sensing. 2020; 12(8):1320. https://doi.org/10.3390/rs12081320
Chicago/Turabian StyleChasmer, Laura, Danielle Cobbaert, Craig Mahoney, Koreen Millard, Daniel Peters, Kevin Devito, Brian Brisco, Chris Hopkinson, Michael Merchant, Joshua Montgomery, and et al. 2020. "Remote Sensing of Boreal Wetlands 1: Data Use for Policy and Management" Remote Sensing 12, no. 8: 1320. https://doi.org/10.3390/rs12081320
APA StyleChasmer, L., Cobbaert, D., Mahoney, C., Millard, K., Peters, D., Devito, K., Brisco, B., Hopkinson, C., Merchant, M., Montgomery, J., Nelson, K., & Niemann, O. (2020). Remote Sensing of Boreal Wetlands 1: Data Use for Policy and Management. Remote Sensing, 12(8), 1320. https://doi.org/10.3390/rs12081320