Retrieval of Aerodynamic Parameters in Rubber Tree Forests Based on the Computer Simulation Technique and Terrestrial Laser Scanning Data


 ,
,  ,
, 
Abstract
1. Introduction
2. Materials and Methods
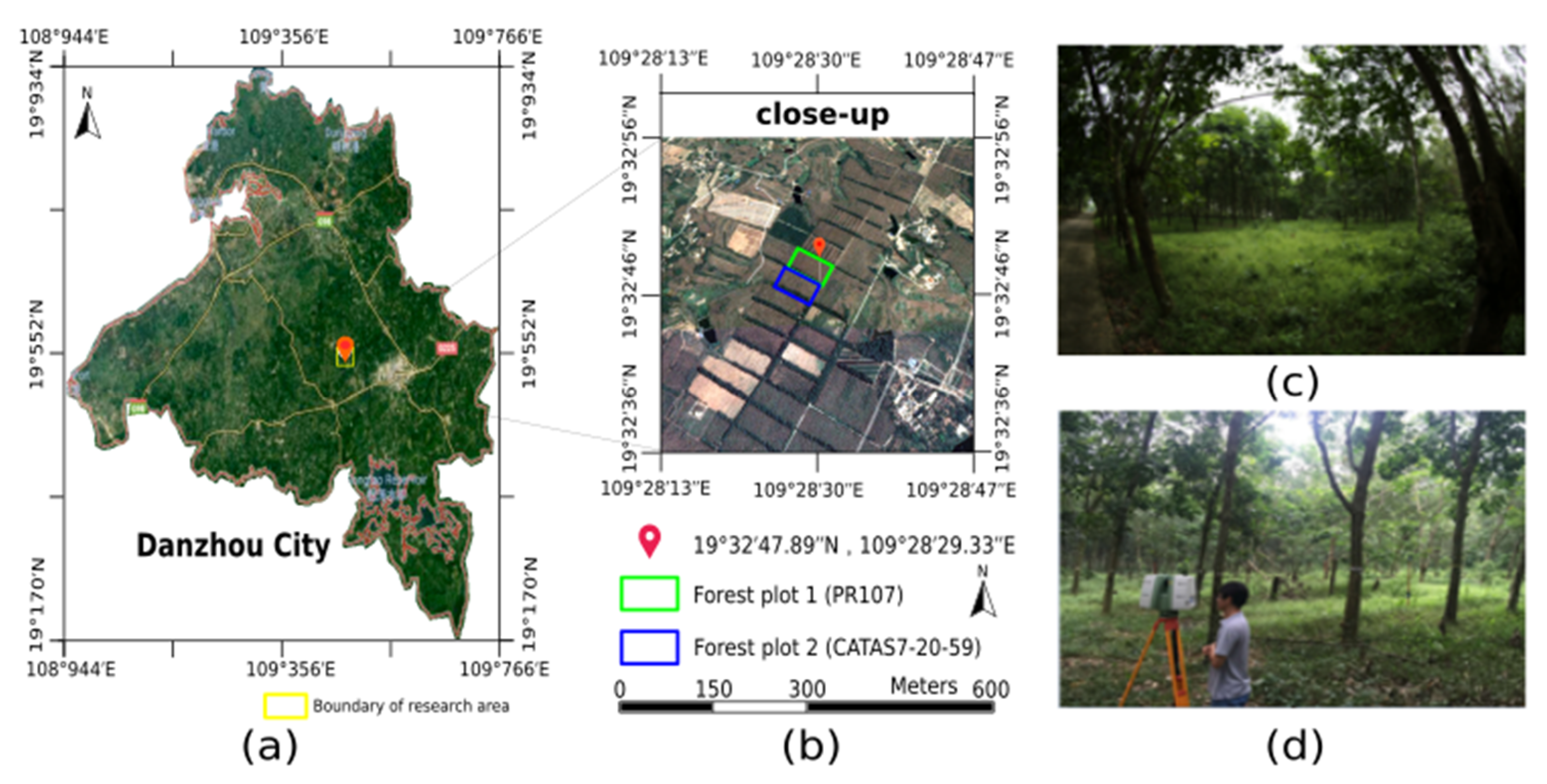
2.1. Study Site and Data Collection
2.2. Data Preprocessing
2.3. Branch Skeleton Reconstruction
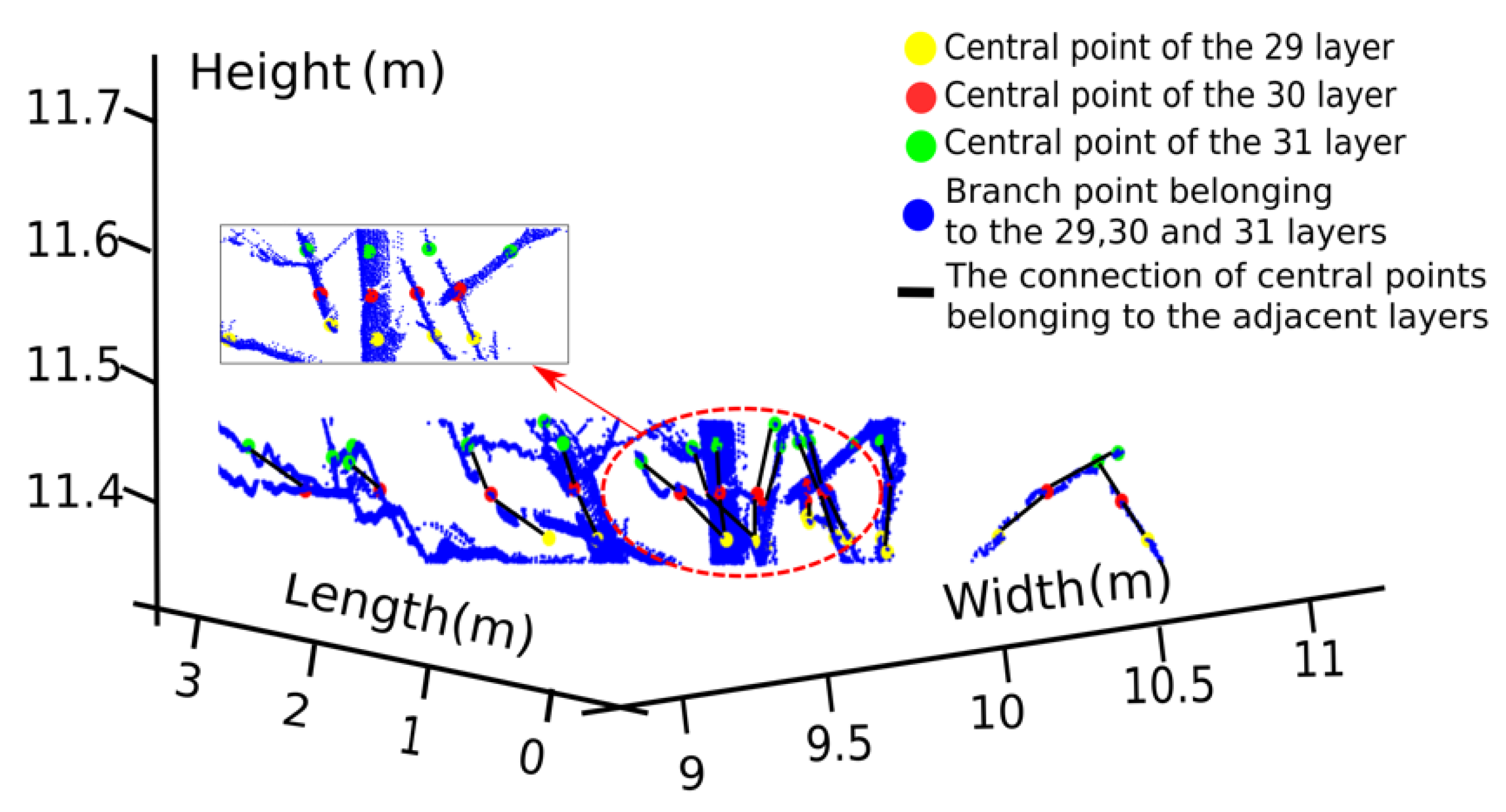
2.3.1. Stratifying Branch Points and Obtaining the Central Points of Each Layer
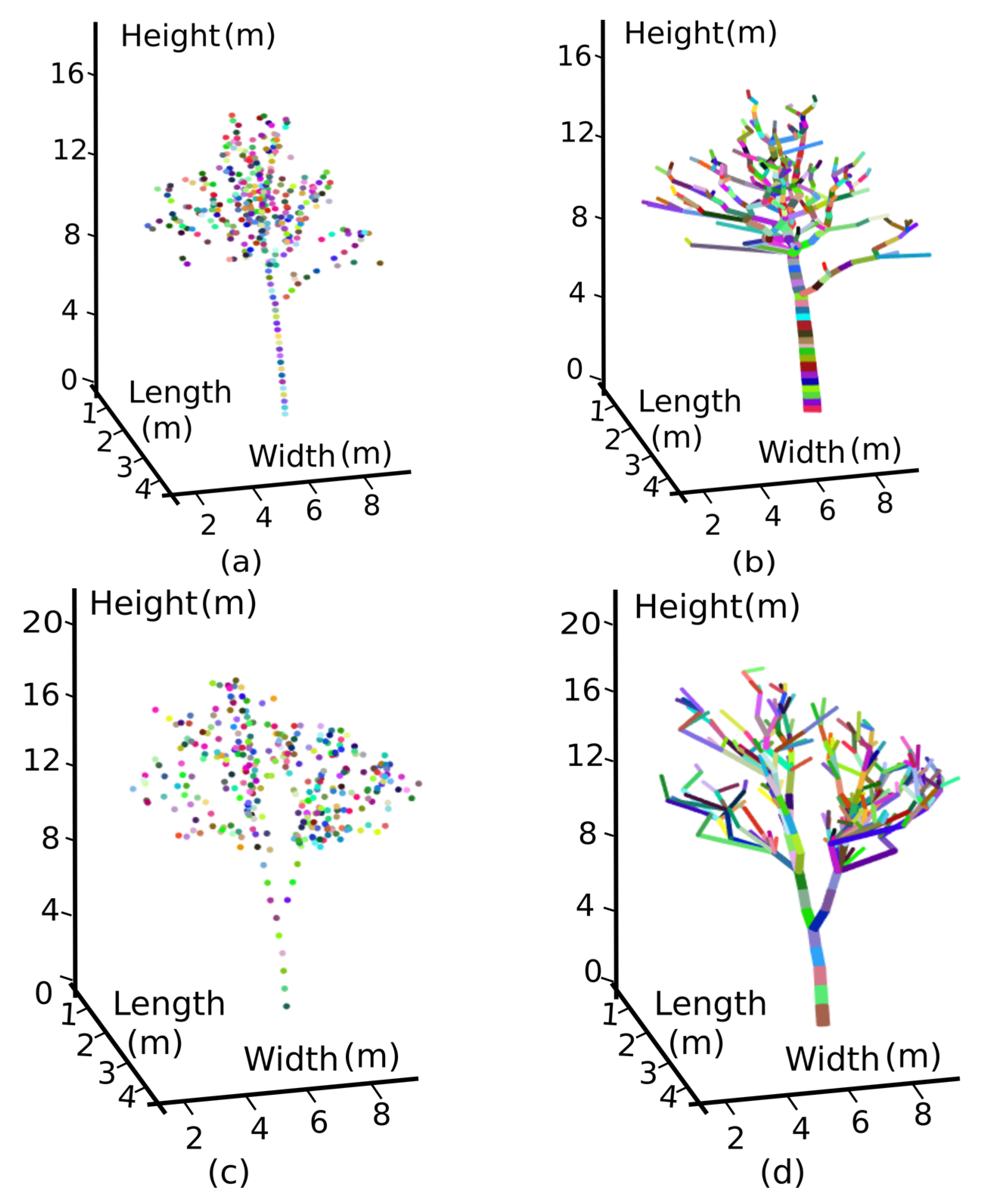
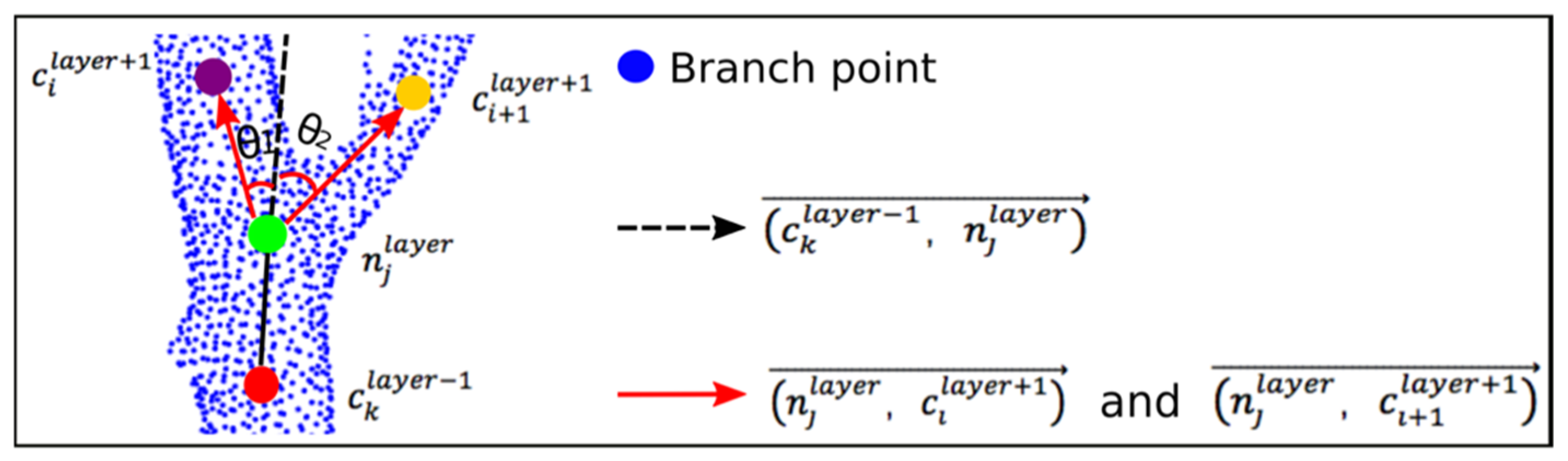
2.3.2. Adopting the Cylinder Model to Form the Tree Skeleton
- Root node: root node is the lowermost central point.
- Bifurcation node: bifurcation node () has two or more connected child nodes.
- Edge node: edge node has no connected child nodes (the nearest central point to is in the upper layer).
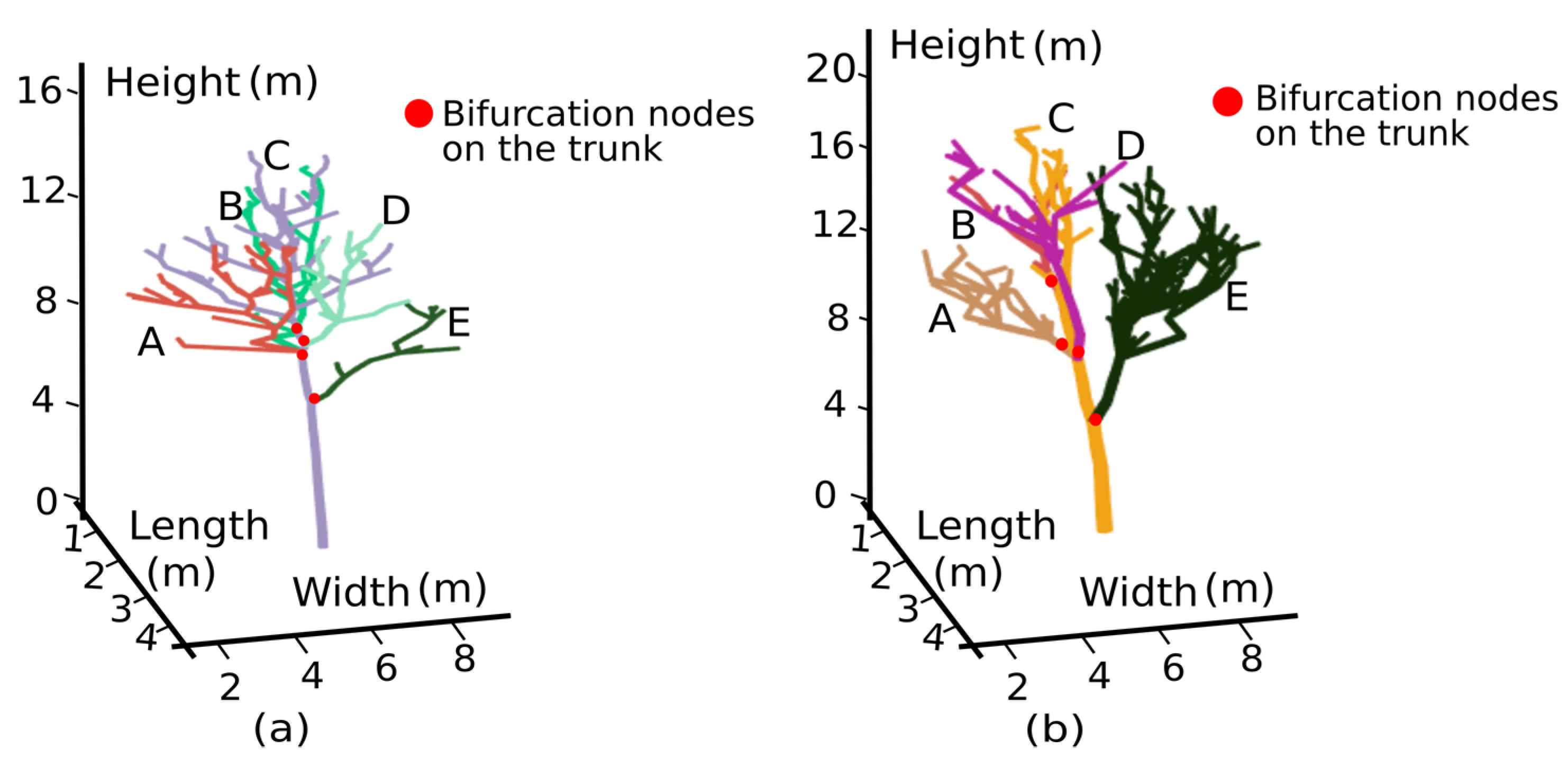
2.3.3. Recognizing the Trunk and First-Order Branches
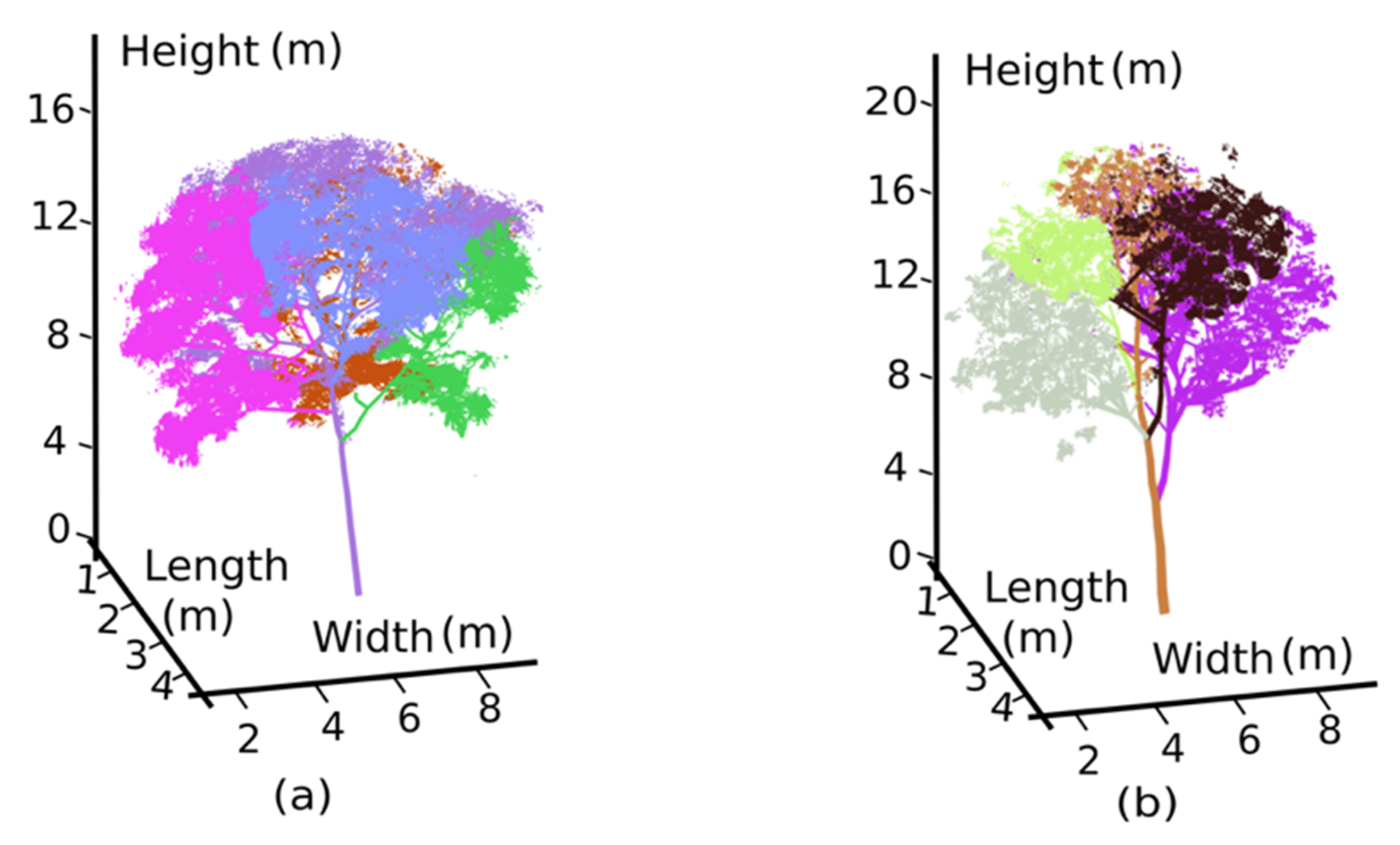
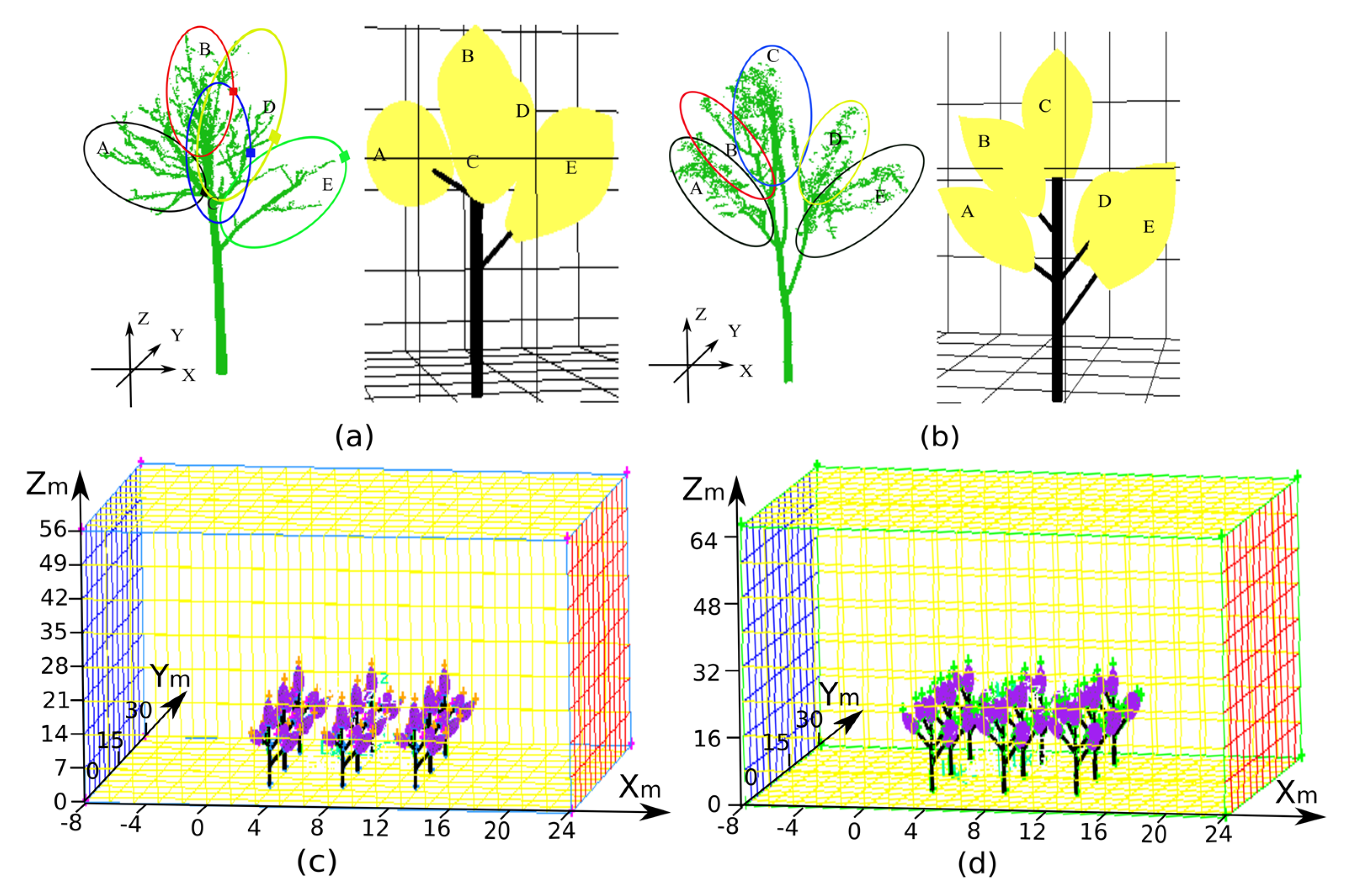
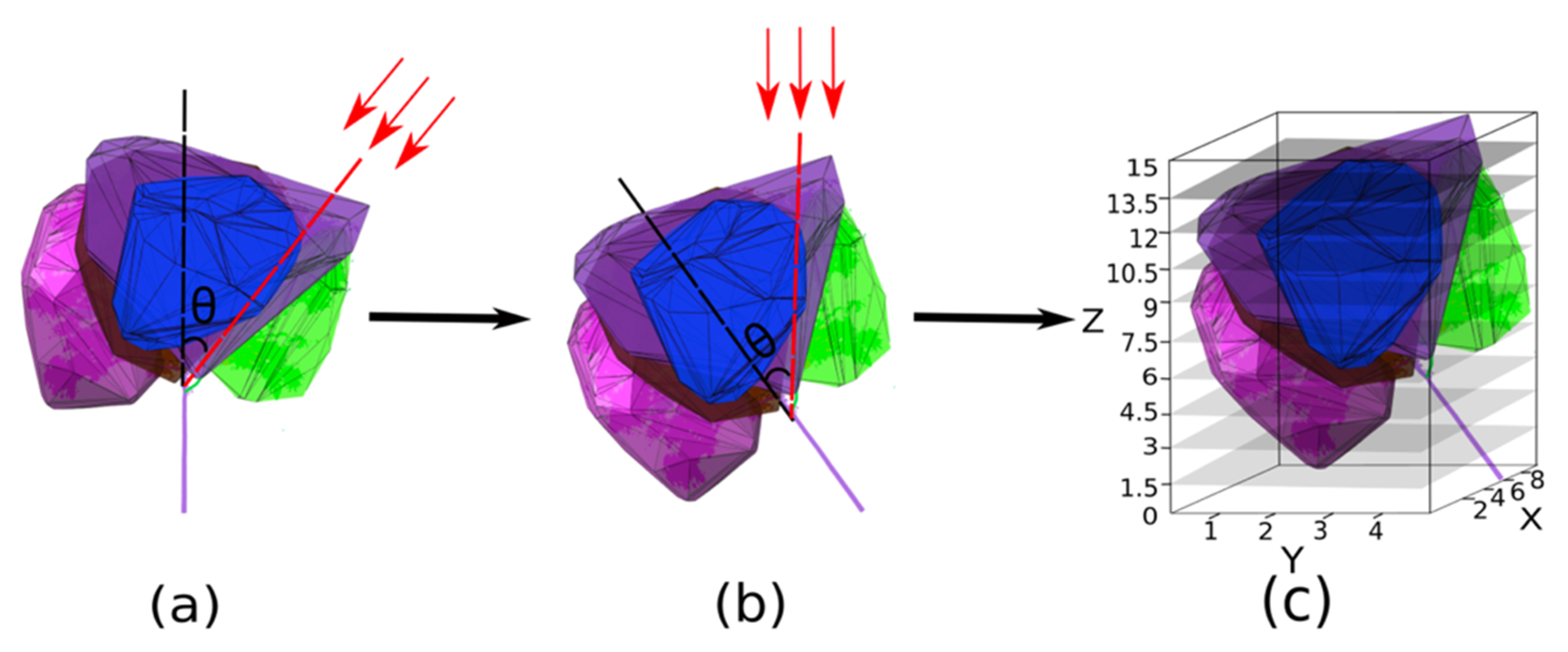
2.3.4. Determining Foliage Clumps based on the Trunk and First-Order Branches
2.3.5. Retrieving the Foliage Clump Properties
- LAI is the ratio of the total leaf area to ground area. First, after the single-leaf extraction and the number of leaves in each foliage clump were obtained using the method described in [29], Delaunay triangulation was adopted to deduce the area of each leaf. We acquired the LAI by computing the ratio of the sum of all leaf areas in each foliage clump to the projected area of each foliage clump.
- Crown volume and foliage clump volume: A 3D convex hull algorithm [6] was used to deduce the tree crown volume and volume of each foliage clump.
- Leaf area density: For each foliage clump, the leaf area density was expressed as the ratio of total leaf area to the volume of each foliage clump.
- Gap fraction: The detailed derivation of the gap fraction of each foliage clump is available in Appendix B.
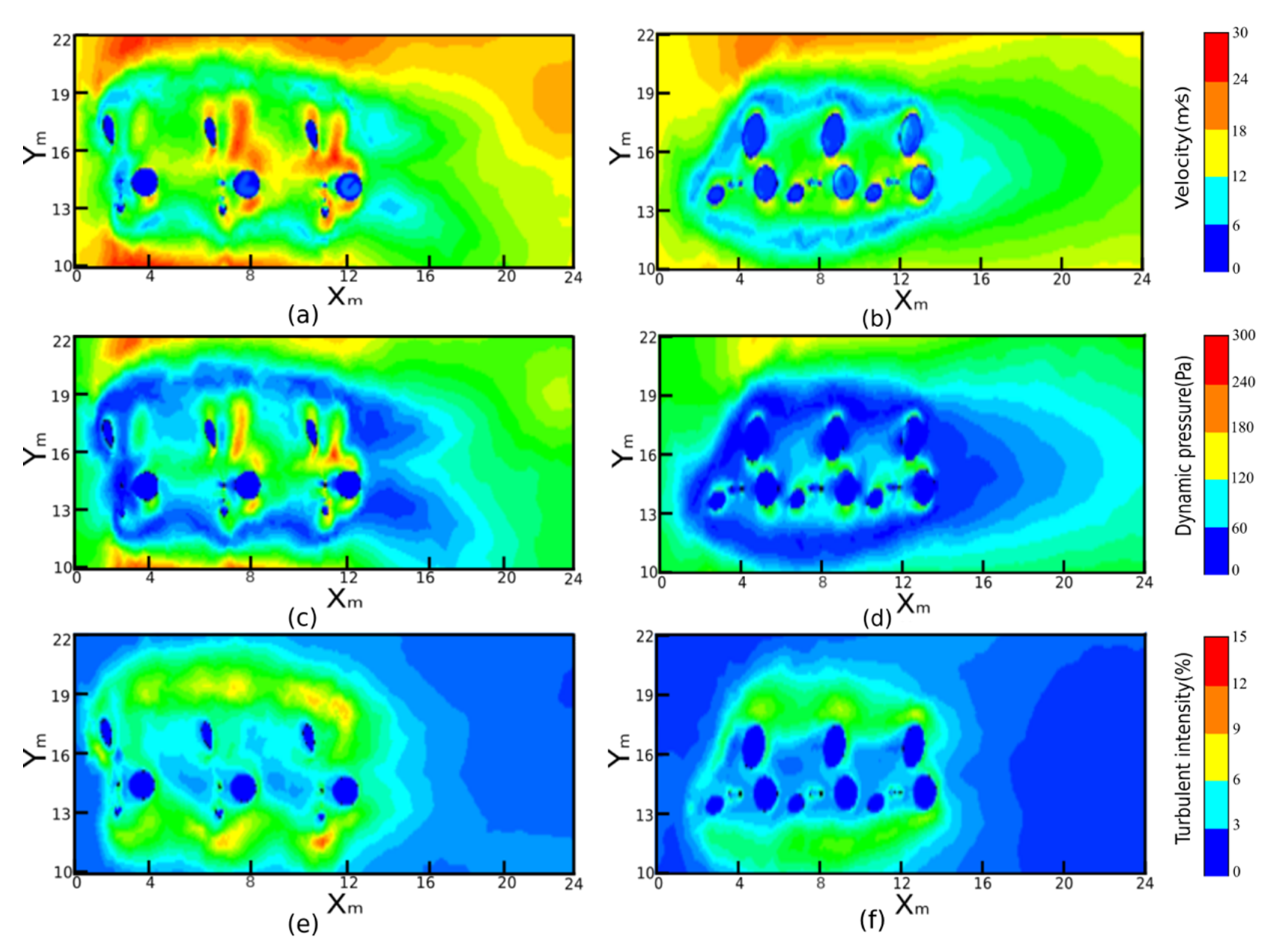
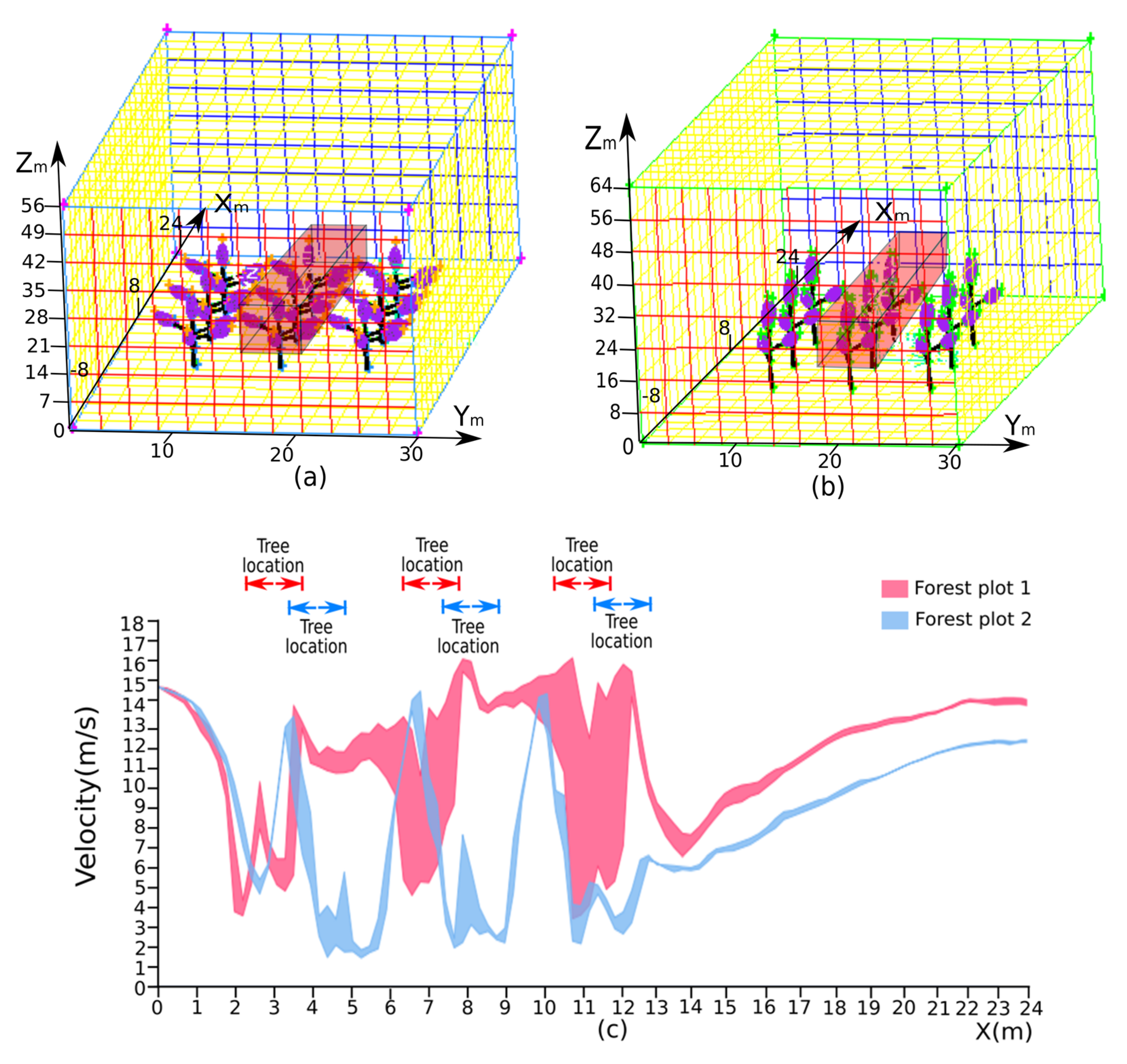
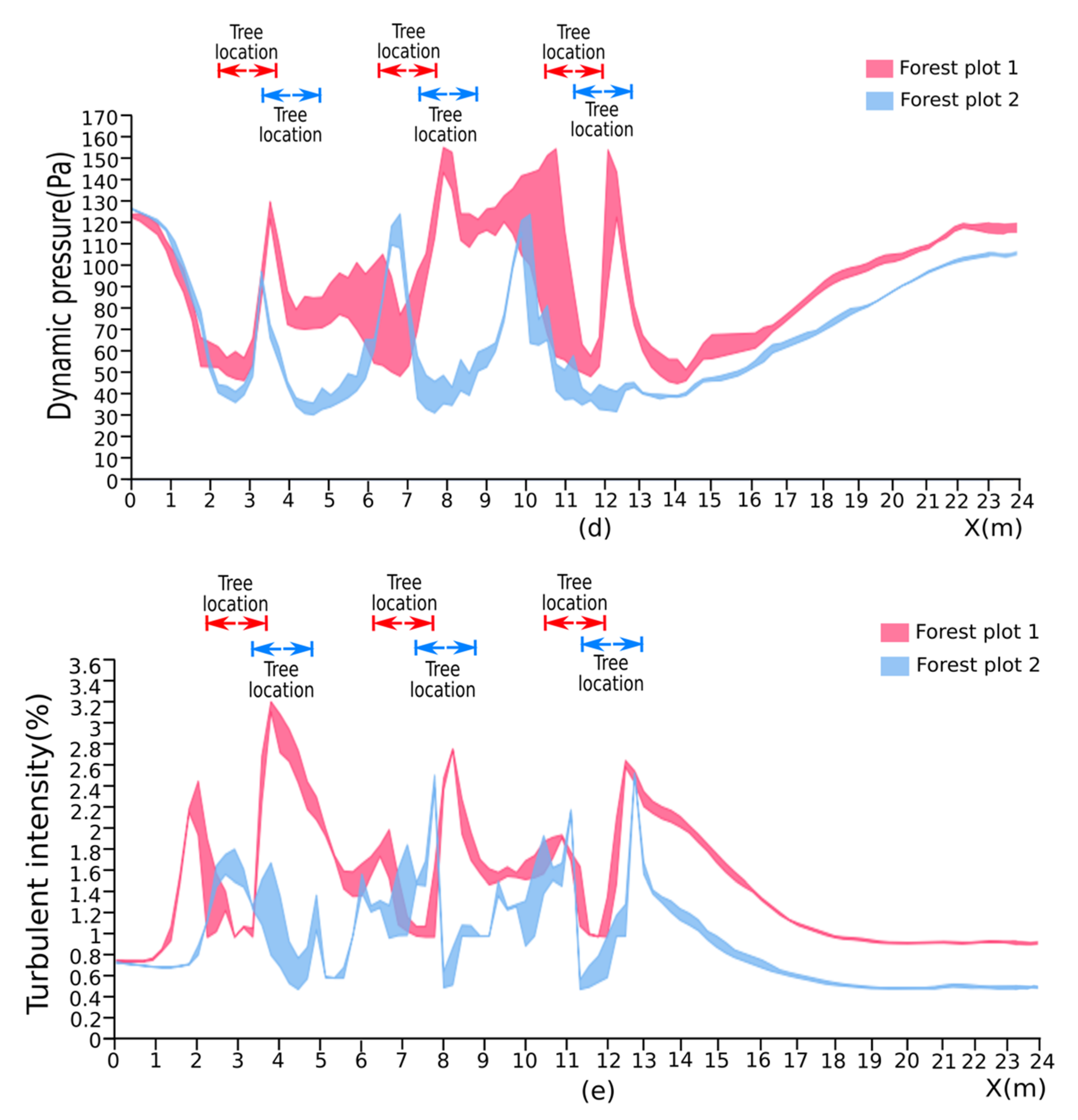
2.3.6. Retrieval of the Wind-Related Parameters in the Rubber Tree Plot
3. Results
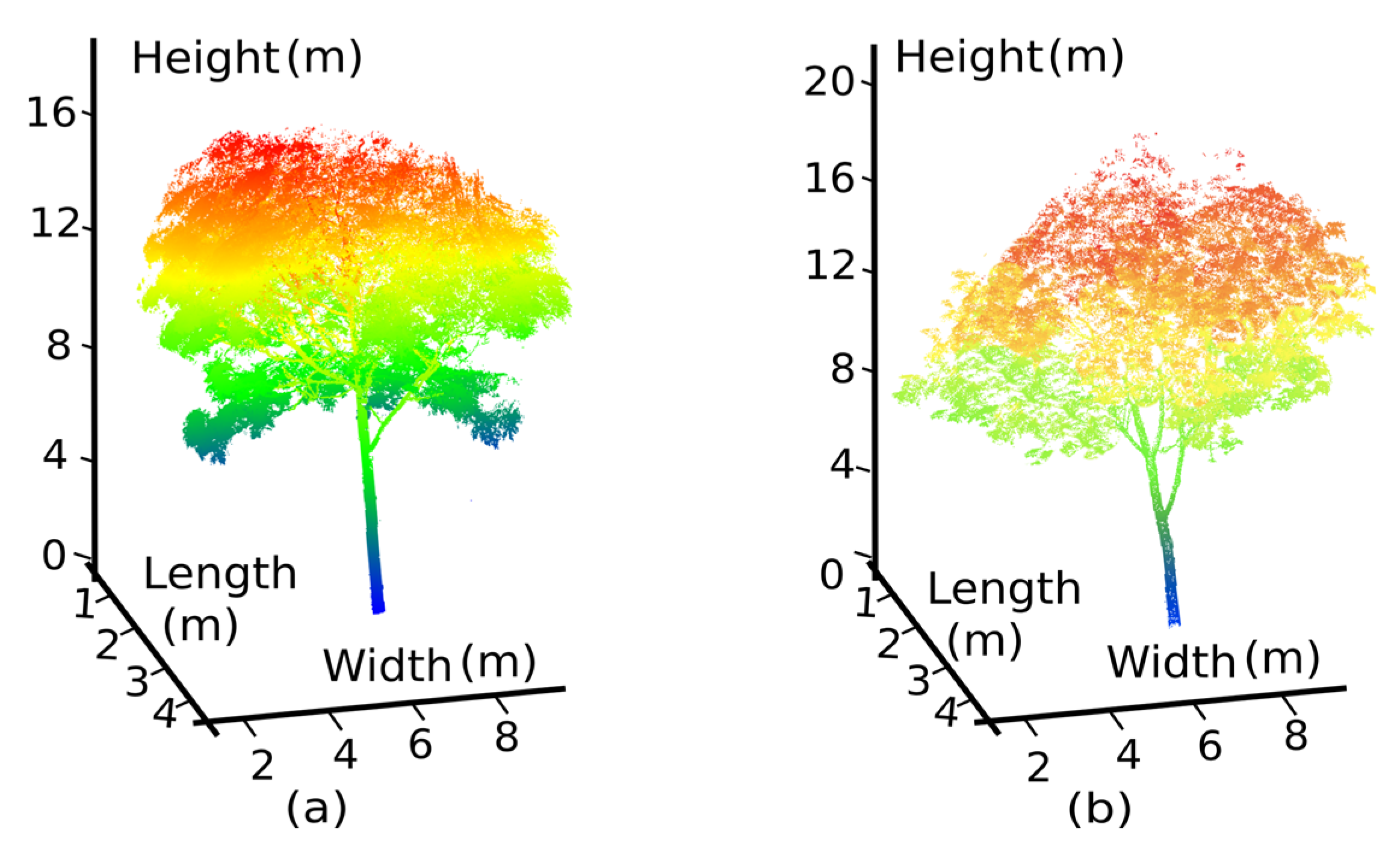
3.1. Properties of the Two Rubber Trees
3.2. Reconstruction of the Forest Plot Model
3.3. Analysing the Wind-Related Parameters in Forest Plots of Different Clones
4. Discussion
5. Conclusions
- Trees with large or dense crowns are more vulnerable to windthrow than are trees with smaller open crowns. Crown modification techniques, such as pruning and topping to reduce the effective crown size and density, can considerably reduce the risk of windthrow. Where possible, creating gaps that are too large and exposing individual branches or foliage clumps through these types of cuts should be avoided.
- A wide variety of rubber tree clones is planted in the coastal areas of China. The choice of rubber tree clones should take into account the probability of wind damage. Before extensively promoting a new clone of rubber trees, our method can be used to analyse the forest parameters, determine their aerodynamic parameters under windy conditions and measure the resistance capability of tree clones.
- Quantification of wind damage under different forest cultivation practices (e.g., adjusting the spatial distance between trees or changing the arrangement of trees) in the forest can be explored using our method to analyse to identify suitable silvicultural management strategies for different rubber tree clones.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Rule of Minimal Change in the Growth Angle

Appendix B. Derivation of the Gap Fraction

Appendix C. Standard k-ϵ Two Equation Model
Appendix C.1. Momentum Model
Appendix C.2. Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cε2 | ||||
|---|---|---|---|---|
| 0.09 | 1.42 | 1.92 | 1.0 | 1.3 |
References
- Li, L.; Kareem, A.; Xiao, Y.; Song, L.; Zhou, C. A comparative study of field measurements of the turbulence characteristics of typhoon and hurricane winds. J. Wind Eng. Ind. Aerodyn. 2015, 140, 49–66. [Google Scholar] [CrossRef]
- Dupont, S.; Pivato, D.; Brunet, Y. Wind damage propagation in forests. Agric. For. Meteorol. 2015, 214, 243–251. [Google Scholar] [CrossRef]
- Change, C. The Physical Science Basis; Intergovernmental Panel on Climate Change: Geneva, Switzerland, 2013. [Google Scholar]
- Xia, Z.; Liu, K.; Zhang, S.; Yu, W.; Zou, M.; He, L.; Wang, W. An ultra-high density map allowed for mapping QTL and candidate genes controlling dry latex yield in rubber tree. Ind. Crops Prod. 2018, 120, 351–356. [Google Scholar] [CrossRef]
- Suchat, S.; Theanjumpol, P.; Karrila, S. Rapid moisture determination for cup lump natural rubber by near infrared spectroscopy. Ind. Crops Prod. 2015, 76, 772–780. [Google Scholar] [CrossRef]
- Yun, T.; Jiang, K.; Hou, H.; An, F.; Chen, B.; Jiang, A.; Li, W.; Xue, L. Rubber Tree Crown Segmentation and Property Retrieval using Ground-Based Mobile LiDAR after Natural Disturbances. Remote Sens. 2019, 11, 903. [Google Scholar] [CrossRef]
- Schelhaas, M.-J.; Hengeveld, G.; Moriondo, M.; Reinds, G.J.; Kundzewicz, Z.W.; Ter Maat, H.; Bindi, M. Assessing risk and adaptation options to fires and windstorms in European forestry. Mitig. Adapt. Strateg. Glob. Chang. 2010, 15, 681–701. [Google Scholar] [CrossRef]
- Zhu, J.; Li, X.; Liu, Z.; Cao, W.; Gonda, Y.; Matsuzaki, T. Factors affecting the snow and wind induced damage of a montane secondary forest in northeastern China. Silva. Fenn. 2006, 40, 37. [Google Scholar] [CrossRef]
- Gardiner, B.; Berry, P.; Moulia, B. Wind impacts on plant growth, mechanics and damage. Plant Sci. 2016, 245, 94–118. [Google Scholar] [CrossRef]
- Hayashi, M.; Saigusa, N.; Oguma, H.; Yamagata, Y.; Takao, G. Quantitative assessment of the impact of typhoon disturbance on a Japanese forest using satellite laser altimetry. Remote Sens. Environ. 2015, 156, 216–225. [Google Scholar] [CrossRef]
- Villamayor, B.M.R.; Rollon, R.N.; Samson, M.S.; Albano, G.M.G.; Primavera, J.H. Impact of Haiyan on Philippine mangroves: Implications to the fate of the widespread monospecific Rhizophora plantations against strong typhoons. Ocean. Coast. Manag. 2016, 132, 1–14. [Google Scholar] [CrossRef]
- Dolan, K.A.; Hurtt, G.C.; Chambers, J.Q.; Dubayah, R.O.; Frolking, S.; Masek, J.G. Using ICESat’s Geoscience Laser Altimeter System (GLAS) to assess large-scale forest disturbance caused by hurricane Katrina. Remote Sens. Environ. 2011, 115, 86–96. [Google Scholar] [CrossRef]
- Peltola, H.; Ikonen, V.-P.; Gregow, H.; Strandman, H.; Kilpeläinen, A.; Venäläinen, A.; Kellomäki, S. Impacts of climate change on timber production and regional risks of wind-induced damage to forests in Finland. For. Ecol. Manag. 2010, 260, 833–845. [Google Scholar] [CrossRef]
- Rich, R.L.; Frelich, L.; Reich, P.B.; Bauer, M.E. Detecting wind disturbance severity and canopy heterogeneity in boreal forest by coupling high-spatial resolution satellite imagery and field data. Remote Sens. Environ. 2010, 114, 299–308. [Google Scholar] [CrossRef]
- Lagergren, F.; Jönsson, A.M.; Blennow, K.; Smith, B. Implementing storm damage in a dynamic vegetation model for regional applications in Sweden. Ecol. Modell. 2012, 247, 71–82. [Google Scholar] [CrossRef]
- Pivato, D.; Dupont, S.; Brunet, Y. A simple tree swaying model for forest motion in windstorm conditions. Trees 2014, 28, 281–293. [Google Scholar] [CrossRef]
- Schelhaas, M.J. The wind stability of different silvicultural systems for Douglas-fir in the Netherlands: A model-based approach. Forestry 2008, 81, 399–414. [Google Scholar] [CrossRef]
- Sylvain, D.; Veli-Pekka, I.; Hannu, V.; Peltola, H. Predicting tree damage in fragmented landscapes using a wind risk model coupled with an airflow model. Can. J. For. Res. 2015, 45, 150409143413008. [Google Scholar]
- Locatelli, T.; Tarantola, S.; Gardiner, B.; Patenaude, G. Variance-based sensitivity analysis of a wind risk model-Model behaviour and lessons for forest modelling. Environ. Model. Softw. 2017, 87, 84–109. [Google Scholar] [CrossRef]
- Gardiner, B.; Peltola, H.; Kellomäki, S. Comparison of two models for predicting the critical wind speeds required to damage coniferous trees. Ecol. Modell. 2000, 129, 1–23. [Google Scholar] [CrossRef]
- Blennow, K.; Andersson, M.; Sallnäs, O.; Olofsson, E. Climate change and the probability of wind damage in two Swedish forests. For. Ecol. Manag. 2010, 259, 818–830. [Google Scholar] [CrossRef]
- Watt, M.S.; Moore, J.R.; McKinlay, B. The influence of wind on branch characteristics of Pinus radiata. Trees 2005, 19, 58–65. [Google Scholar] [CrossRef]
- James, K.R.; Dahle, G.A.; Grabosky, J.; Kane, B.; Detter, A. Tree biomechanics literature review: Dynamics. Arboric. Urban For. 2014, 40, 1–15. [Google Scholar]
- Chiba, Y. Modelling stem breakage caused by typhoons in plantation Cryptomeria japonica forests. For. Ecol. Manag. 2000, 135, 123–131. [Google Scholar] [CrossRef]
- Tadrist, L.; Saudreau, M.; De Langre, E. Wind and gravity mechanical effects on leaf inclination angles. J. Theor. Biol. 2014, 341, 9–16. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Shao, C. The steady and vibrating statuses of tulip tree leaves in wind. Theor. Appl. Mech. Lett. 2017, 7, 30–34. [Google Scholar] [CrossRef]
- Yun, T.; Cao, L.; An, F.; Chen, B.; Xue, L.; Li, W.; Pincebourde, S.; Smith, M.J.; Eichhorn, M.P. Simulation of multi-platform LiDAR for assessing total leaf area in tree crowns. Agric. For. Meteorol. 2019, 276, 107610. [Google Scholar] [CrossRef]
- Sheng, Q.; Zhang, Y.; Zhu, Z.; Li, W.; Xu, J.; Tan, R. An experimental study to quantify road greenbelts and their association with PM2.5 concentration along city main roads in Nanjing, China. Sci. Total Environ. 2019, 667, 710–717. [Google Scholar] [CrossRef]
- Xu, Q.; Cao, L.; Xue, L.; Chen, B.; An, F.; Yun, T. Extraction of Leaf Biophysical Attributes Based on a Computer Graphic-based Algorithm Using Terrestrial Laser Scanning Data. Remote Sens. 2019, 11, 15. [Google Scholar] [CrossRef]
- Sun, Y.; Liang, X.; Liang, Z.; Welham, C.; Li, W. Deriving Merchantable Volume in Poplar through a Localized Tapering Function from Non-Destructive Terrestrial Laser Scanning. Forests 2016, 7, 87. [Google Scholar] [CrossRef]
- Hu, C.; Pan, Z.; Zhong, T. Leaf and wood separation of poplar seedlings combining locally convex connected patches and K-means++ clustering from terrestrial laser scanning data. J. Appl. Remote Sens. 2020, 14, 1. [Google Scholar] [CrossRef]
- Hu, C.; Pan, Z.; Li, P. A 3D Point Cloud Filtering Method for Leaves Based on Manifold Distance and Normal Estimation. Remote Sens. 2019, 11, 198. [Google Scholar] [CrossRef]
- Xu, S.; Xu, S.; Ye, N.; Zhu, F. Automatic extraction of street trees’ nonphotosynthetic components from MLS data. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 64–77. [Google Scholar] [CrossRef]
- Chen, B.; Cao, J.; Wang, J.; Wu, Z.; Tao, Z.; Chen, J.; Yang, C.; Xie, G. Estimation of rubber stand age in typhoon and chilling injury afflicted area with Landsat TM data: A case study in Hainan Island, China. For. Ecol. Manag. 2012, 274, 222–230. [Google Scholar] [CrossRef]
- Xu, S.; Wang, R. Power Line Extraction from Mobile LiDAR Point Clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 734–743. [Google Scholar] [CrossRef]
- Yang, H.; Yang, X.; Zhang, F.; Ye, Q. Robust Plane Clustering Based on L1-Norm Minimization. IEEE Access 2020, 8, 29489–29500. [Google Scholar] [CrossRef]
- Savage, J.A.; Beecher, S.D.; Clerx, L.; Gersony, J.T.; Knoblauch, J.; Losada, J.M.; Jensen, K.H.; Knoblauch, M.; Holbrook, N.M. Maintenance of carbohydrate transport in tall trees. Nat. Plants 2017, 3, 965. [Google Scholar] [CrossRef]
- Duchemin, L.; Eloy, C.; Badel, E.; Moulia, B. Tree crowns grow into self-similar shapes controlled by gravity and light sensing. J. R. Soc. Interface 2018, 15, 20170976. [Google Scholar] [CrossRef]
- Wang, J.; Chen, X.; Cao, L.; An, F.; Chen, B.; Xue, L.; Yun, T. Individual Rubber Tree Segmentation Based on Ground-Based LiDAR Data and Faster R-CNN of Deep Learning. Forests 2019, 10, 793. [Google Scholar] [CrossRef]
- Shih, T.-H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A new k-ϵ eddy viscosity model for high reynolds number turbulent flows. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Bauman, R.P.; Schwaneberg, R. Interpretation of Bernoulli’s equation. Phys. Teach. 1994, 32, 478–488. [Google Scholar] [CrossRef]
- Pipinato, A. Innovative Bridge Design Handbook: Construction, Rehabilitation and Maintenance; Butterworth-Heinemann: Oxford, UK, 2015; ISBN 0128004878. [Google Scholar]
- Durand, W.F. Aerodynamic Theory: A General Review of Progress Under a Grant of the Guggenheim Fund for the Promotion of Aeronautics; Springer: Berlin/Heidelberg, Germany, 2013; ISBN 364291487X. [Google Scholar]
- Xi, W.; Peet, R.K.; Decoster, J.K.; Urban, D.L. Tree damage risk factors associated with large, infrequent wind disturbances of Carolina forests. Forestry 2008, 81, 317–334. [Google Scholar] [CrossRef]
- Valinger, E.; Fridman, J. Factors affecting the probability of windthrow at stand level as a result of Gudrun winter storm in southern Sweden. For. Ecol. Manag. 2011, 262, 398–403. [Google Scholar] [CrossRef]
- Sellier, D.; Fourcaud, T. Crown structure and wood properties: Influence on tree sway and response to high winds. Am. J. Bot. 2009, 96, 885–896. [Google Scholar] [CrossRef] [PubMed]
- Nilson, T.; Kuusk, A.; Lang, M.; Pisek, J.; Kodar, A. Simulation of statistical characteristics of gap distribution in forest stands. Agric. For. Meteorol. 2011, 151, 895–905. [Google Scholar] [CrossRef]
- Haverd, V.; Lovell, J.L.; Cuntz, M.; Jupp, D.L.B.; Newnham, G.J.; Sea, W. The canopy semi-analytic Pgap and radiative transfer (CanSPART) model: Formulation and application. Agric. For. Meteorol. 2012, 160, 14–35. [Google Scholar] [CrossRef]
- Zheng, G.; Moskal, L.M. Computational-geometry-based retrieval of effective leaf area index using terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3958–3969. [Google Scholar] [CrossRef]













| Tree | Total Number of Leaf Points | Tree Crown Volume (m3) | Average Single-Leaf Area (cm2) | Tree Crown Projection Area (m2) | LAI (m2/m2) |
|---|---|---|---|---|---|
| Tree 1 | 117,615 | 168.73 | 75.53 | 16.08 | 3.08 |
| Tree 2 | 88,249 | 142.51 | 79.54 | 12.65 | 2.62 |
| Tree | Height (m)/ Crown Diameter (m) (E-W) × (N-S) | Branch Diameter (cm) (Our Method/ Field Measurement) | Angle between the Trunk and the First-Order Branch (°) (Our Method/Field Measurement) | |||
|---|---|---|---|---|---|---|
| Tree 1 | 15.36/ 3.85 × 5.71 | A:21.6/22.1 B:22.3/20.8 C:28.7/30.5 D:25.3/23.9 E:18.7/20.8 | 45.19/ 47.23 | 53.14/ 49.36 | 47.37/ 45.64 | 60.72/ 57.56 |
| Tree 2 | 17.13/ 3.07 × 5.59 | A:20.7/22.8 B:16.4/15.7 C:35.1/36.8 D:25.6/27.3 E:18.6/19.5 | 42.36/ 41.78 | 37.89/ 40.25 | 34.47/ 32.92 | 43.91/ 42.24 |
| Tree | Foliage Clump Belonging to T/Fb | Number of Leaf Cloud Points | Foliage Clump Volume (m3)/ Projection Area (m2) | Number of Leaves [29] | Leaf Area (m2)/LAI | Estimated Leaf Area Density (m2/m3) | Gap Fraction |
|---|---|---|---|---|---|---|---|
| (Our Method/ Field Measurement) | |||||||
| Tree 1 | A(Fb) | 20832 | 29.28/3.26 | 1157/1274 | 8.74/2.68 | 0.30 | 0.42 |
| B(Fb) | 17411 | 27.65/2.87 | 967/1027 | 7.30/2.54 | 0.26 | 0.53 | |
| C(T) | 21548 | 28.86/3.38 | 1197/1007 | 9.04/2.67 | 0.31 | 0.48 | |
| D(Fb) | 38216 | 49.12/4.23 | 2123/2242 | 16.03/3.78 | 0.33 | 0.43 | |
| E(Fb) | 19608 | 26.78/3.21 | 1089/1026 | 8.23/2.56 | 0.31 | 0.39 | |
| Tree 2 | A(Fb) | 11410 | 22.75/2.13 | 543/609 | 4.32/2.02 | 0.19 | 0.63 |
| B(Fb) | 14821 | 20.34/2.30 | 706/789 | 5.62/2.44 | 0.28 | 0.61 | |
| C(T) | 8852 | 24.70/1.81 | 421/494 | 3.35/1.85 | 0.14 | 0.73 | |
| D(Fb) | 11884 | 25.05/2.23 | 565/487 | 4.49/2.01 | 0.18 | 0.75 | |
| E(Fb) | 41282 | 55.14/5.11 | 1966/2118 | 15.64/3.06 | 0.28 | 0.57 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Huang, X.; Fan, J.; Eichhorn, M.P.; An, F.; Chen, B.; Cao, L.; Zhu, Z.; Yun, T. Retrieval of Aerodynamic Parameters in Rubber Tree Forests Based on the Computer Simulation Technique and Terrestrial Laser Scanning Data. Remote Sens. 2020, 12, 1318. https://doi.org/10.3390/rs12081318
Huang Z, Huang X, Fan J, Eichhorn MP, An F, Chen B, Cao L, Zhu Z, Yun T. Retrieval of Aerodynamic Parameters in Rubber Tree Forests Based on the Computer Simulation Technique and Terrestrial Laser Scanning Data. Remote Sensing. 2020; 12(8):1318. https://doi.org/10.3390/rs12081318
Chicago/Turabian StyleHuang, Zhixian, Xiao Huang, Jiangchuan Fan, Markus P. Eichhorn, Feng An, Bangqian Chen, Lin Cao, Zhengli Zhu, and Ting Yun. 2020. "Retrieval of Aerodynamic Parameters in Rubber Tree Forests Based on the Computer Simulation Technique and Terrestrial Laser Scanning Data" Remote Sensing 12, no. 8: 1318. https://doi.org/10.3390/rs12081318
APA StyleHuang, Z., Huang, X., Fan, J., Eichhorn, M. P., An, F., Chen, B., Cao, L., Zhu, Z., & Yun, T. (2020). Retrieval of Aerodynamic Parameters in Rubber Tree Forests Based on the Computer Simulation Technique and Terrestrial Laser Scanning Data. Remote Sensing, 12(8), 1318. https://doi.org/10.3390/rs12081318