Near-Field Remote Sensing of Surface Velocity and River Discharge Using Radars and the Probability Concept at 10 U.S. Geological Survey Streamgages

 , , , , ,
, , , , ,
Abstract

1. Introduction
2. Materials and Methods
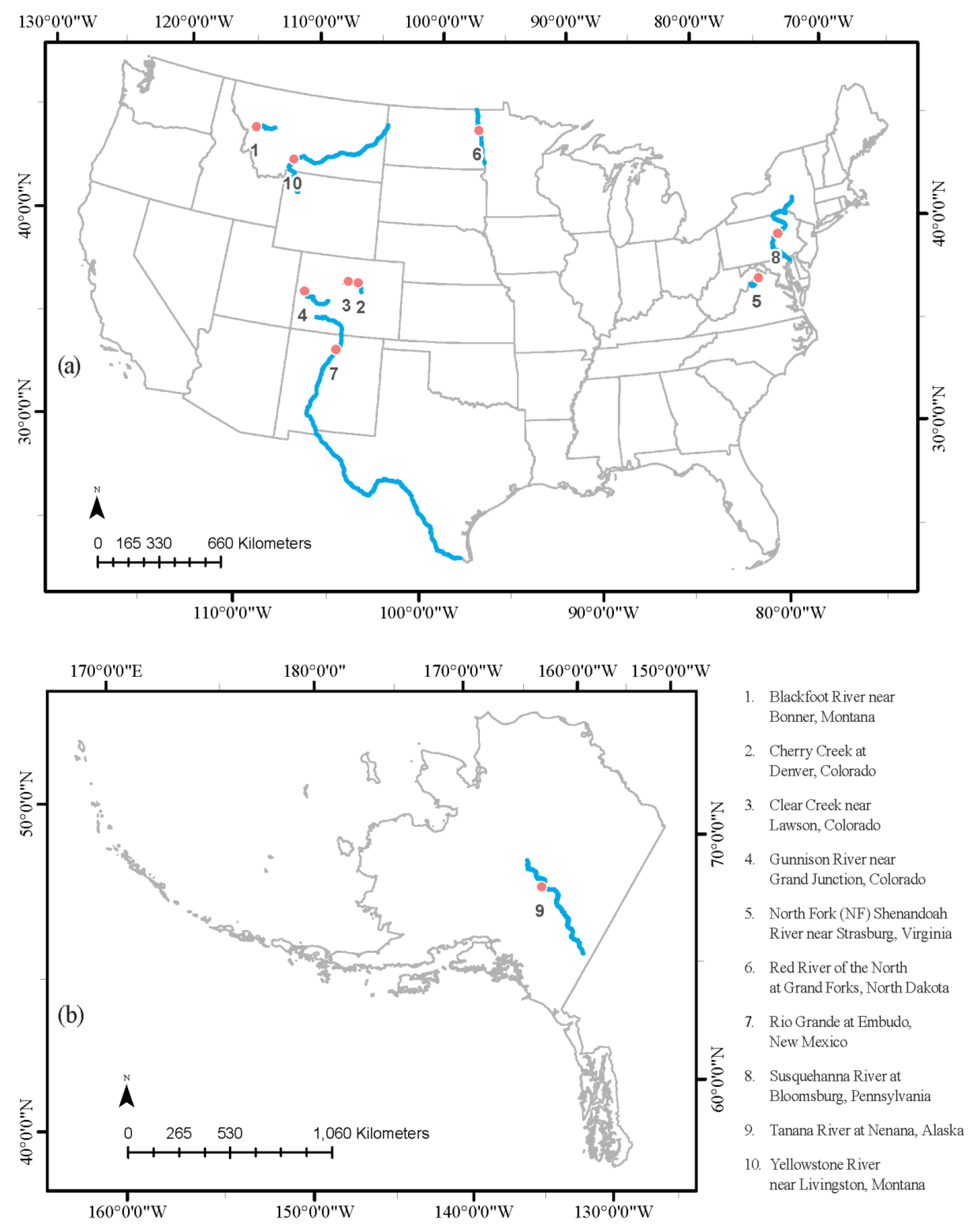
2.1. Site Selection
2.2. Doppler Radar Technology
2.3. Validation Measurements
2.4. Radar Siting
2.4.1. Velocity
2.4.2. y-axis
2.4.3. Cross-sectional Area
2.4.4. Wind Drift
2.5. Radar Deployments
2.6. Discharge Algorithms
2.6.1. Conventional Methods
2.6.2. Probability Concept
3. Results
3.1. Siting and Validation Phase
3.1.1. Velocity
3.1.2. Values of ϕ and Location of the y-axis
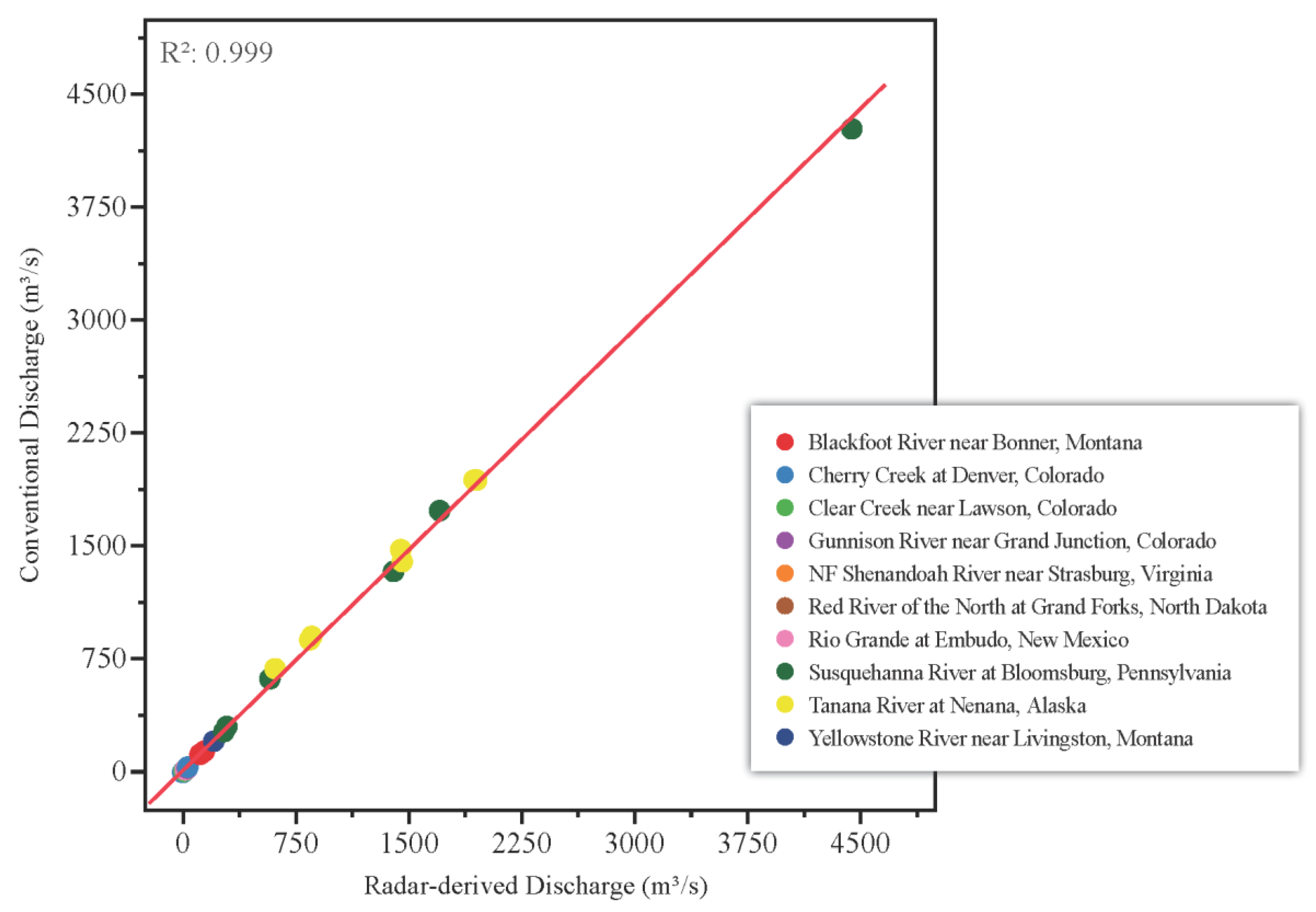
3.1.3. Discharge
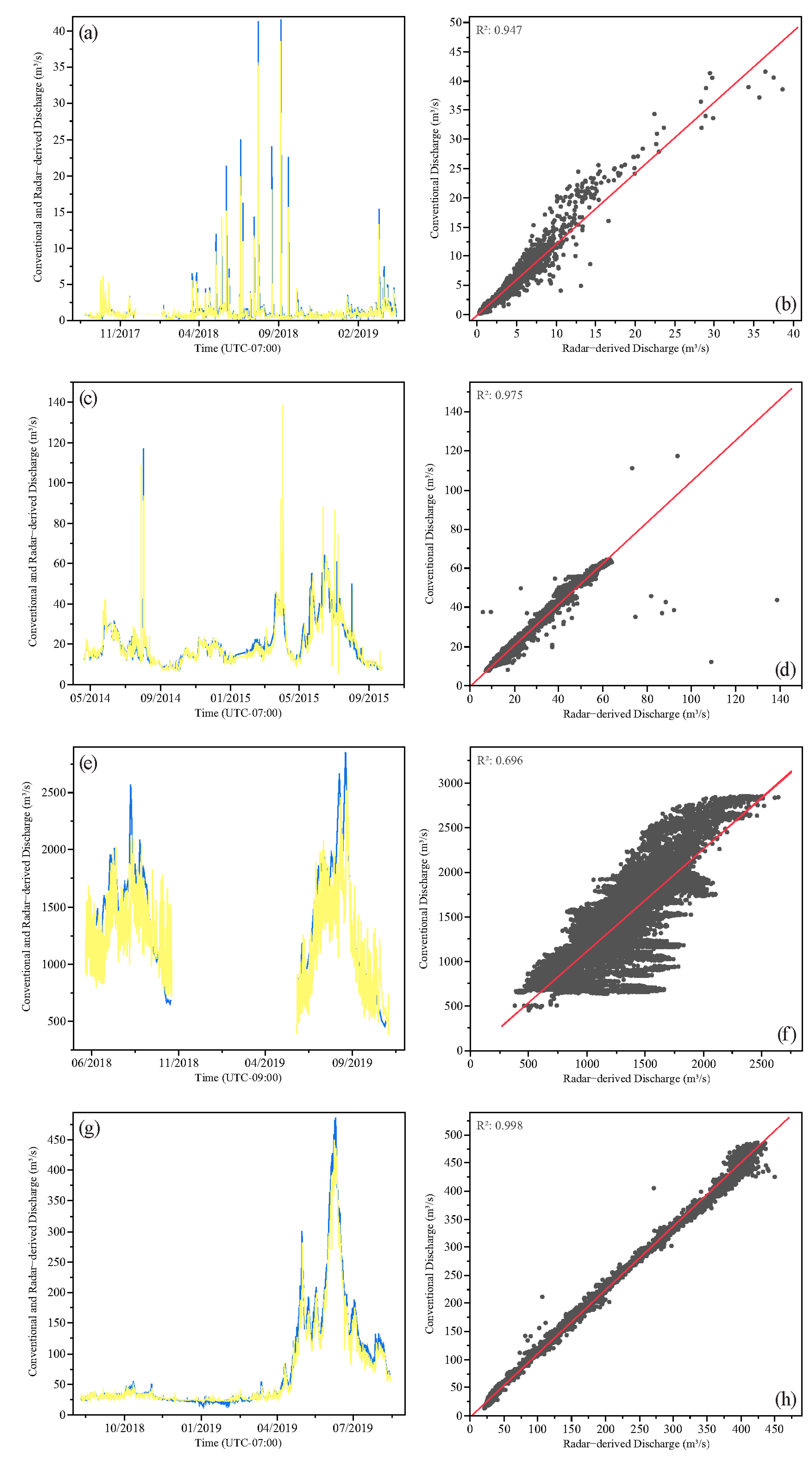
3.2. Operational Phase
3.2.1. Velocity and Discharge
3.2.2. Wind Drift
4. Discussion
4.1. Velocity and Discharge Computations
4.2. Uncertainty
4.2.1. Variability in ϕ
4.2.2. Variability in y-axis
4.2.3. Wind drift, Sample Duration and Frequency, and Minimum-Surface Velocities
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eberts, S.; Woodside, M.; Landers, M.; Wagner, C. Monitoring the Pulse of our Nation’s Rivers and Streams—The U.S. Geological Survey Streamgaging Network; U.S. Geological Survey Fact Sheet 2018–3081; 2018. Available online: https://pubs.er.usgs.gov/publication/fs20183081 (accessed on 19 April 2020).
- Buchanan, T.J.; Somers, W.P. Discharge Measurements at Gaging Stations; U.S. Geological Survey Techniques of Water-Resources Investigations, Book 3, Chap A8; 1969; p. 65. Available online: http://pubs.usgs.gov/twri/twri3a8/ (accessed on 30 December 2019).
- Rantz, S. Measurement and Computation of Streamflow: Volume 1. Measurement of Stage and Discharge; U.S. Geological Survey Water Supply Paper 2175; United States Government Printing Office: Washington, DC, USA, 1982; p. 284.
- Turnipseed, D.P.; Sauer, V.B. Discharge Measurements at Gaging Stations; U.S. Geological Survey Techniques and Methods Book 3, Chap. A8; 2010; p. 87. Available online: http://pubs.usgs.gov/tm/tm3-a8/ (accessed on 30 December 2019).
- Christensen, J.L.; Herrick, L.E. Mississippi River Test: Volume 1. Final Rep.; DCP4400/300; the U.S. Geological Survey, AMETEK/Straza Division: El Cajon, CA, USA, 1982.
- Simpson, M.R. Evaluation of a vessel-mounted acoustic Doppler current profiler for use in rivers and estuaries. In Proceedings of the 3rd Working Conference on Current Measurement, IEEE, Washington, DC, USA, 22–24 January 1986; pp. 106–121. [Google Scholar]
- Gordon, R.L. Acoustic measurement of river discharge. J. Hydraul. Eng. 1989, 115, 925–936. [Google Scholar] [CrossRef]
- Simpson, M.R.; Oltmann, R.N. Discharge-Measurement System Using an Acoustic Doppler Current Profiler with Applications to Large Rivers and Estuaries; U.S. Geological Survey Water Supply Paper 2395; U.S. Geological Survey: Reston, VA, USA, 1993; p. 32.
- Oberg, K.A.; Morlock, S.E.; Caldwell, W.S. Quality Assurance Plan for Discharge Measurements Using Acoustic Doppler Current Profilers; U.S. Geological Survey Scientific Investigations Report 2005–5135; U.S. Geological Survey: Reston, VA, USA, 2005; p. 35.
- Mueller, D.S. QRev—Software for Computation and Quality Assurance of Acoustic Doppler Current Profiler Moving-Boat Streamflow Measurements—User’s Manual for Version 2.8; U.S. Geological Survey Open-File Report 2016–1052; USGS: Reston, VA, USA, 2016; p. 50. Available online: https://pubs.er.usgs.gov/publication/ofr20161052 (accessed on 30 December 2019).
- Mueller, D.S. Extrap: Software to assist the selection of extrapolation methods for moving-boat ADCP streamflow measurements. Comput. Geosci. 2013, 54, 211–218. [Google Scholar] [CrossRef]
- Lin, D.; Grundmann, J.; Eltner, A. Evaluating Image Tracking Approaches for Surface Velocimetry With Thermal Tracers. Water Resour. Res. 2019, 55, 3122–3136. [Google Scholar] [CrossRef]
- Hauet, A.; Morlot, T.; Daubagnan, L. Velocity Profile and Depth-Averaged to Surface Velocity in Natural Streams: A Review over a Large Sample of Rivers. E3S Web of Conferences 40 06015 River Flow, EDP Sciences, France. 2018. Available online: https://www.e3s-conferences.org/articles/e3sconf/abs/2018/15/e3sconf_riverflow2018_06015/e3sconf_riverflow2018_06015.html (accessed on 20 January 2020).
- Fujita, I.; Komura, S. Application of video image analysis for measurements of river-surface flows. Proc. Hydraul. Eng. JSCE 1994, 38, 733–738. [Google Scholar] [CrossRef]
- Tauro, F.; Pagano, C.; Phamduy, P.; Grimaldi, S.; Porfiri, M. Large-scale particle image velocimetry from an unmanned aerial vehicle. IEEE/ASME Trans. Mechatron. 2015, 20, 3269–3275. [Google Scholar] [CrossRef]
- Tauro, F.; Porfiri, M.; Grimaldi, S. Surface flow measurements from drones. J. Hydrol. 2016, 540, 240–245. [Google Scholar] [CrossRef]
- Kinzel, P.J.; Legleiter, C.J. sUAS-based remote sensing of river discharge using thermal particle image velocimetry and bathymetric lidar. Remote Sens. 2019, 11, 2317. [Google Scholar] [CrossRef]
- Dugan, J.P.; Anderson, S.P.; Piotrowski, C.C.; Zuckerman, S.B. Airborne infrared remote sensing of riverine currents. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3895–3907. [Google Scholar] [CrossRef]
- Smith, L.C.; Isacks, B.L.; Bloom, A.L.; Murray, A.B. Estimation of discharge from three braided rivers using synthetic aperture radar satellite imagery. Water Resour. Res. 1996, 32, 2021–2034. [Google Scholar] [CrossRef]
- Leon, J.G.; Calmant, S.; Seyler, F.; Bonnet, M.P.; Cauhope, M.; Frappart, F. Rating curves and estimation of average water depth at the upper Negro River based on satellite altimeter data and modeled discharges. J. Hydrol. 2006, 328, 481–496. [Google Scholar] [CrossRef]
- Getirana, A.C.V.; Bonnet, M.P.; Calmant, S.; Roux, H.; Filho, O.C.R.; Mansur, W.J. Hydrological monitoring of poorly gauged basins based on rainfall–runoff modeling and spatial altimetry. J. Hydrol. 2009, 379, 205–219. [Google Scholar] [CrossRef]
- Birkinshaw, S.J.; O’Donnell, G.M.; Moore, P.; Kilsby, C.G.; Fowler, H.J.; Berry, P.A.M. Using satellite altimetry data to augment flow estimation techniques on the Mekong River. Hydrol. Process. 2010, 24, 3811–3825. [Google Scholar] [CrossRef]
- Getirana, A.C.V.; Peters-Lidard, C. Estimating water discharge from large radar altimetry datasets. Hydrol. Earth Syst. Sci. 2013, 17, 923–933. [Google Scholar] [CrossRef]
- Paiva, R.C.D.; Buarque, D.C.; Colischonn, W.; Bonnet, M.-P.; Frappart, F.; Calmant, S.; Mendes, C.A.B. Large-scale hydrological and hydrodynamics modelling of the Amazon River basin. Water Resour. Res. 2013, 49, 1226–1243. [Google Scholar] [CrossRef]
- Tarpanelli, A.; Barbetta, S.; Brocca, L.; Moramarco, T. River discharge estimation by using altimetry data and simplified flood routing modeling. Remote Sens. 2013, 5, 4145–4162. [Google Scholar] [CrossRef]
- Birkinshaw, S.J.; Moore, P.; Kilsby, C.G.; O’Donnell, G.M.; Hardy, A.J.; Berry, P.A.M. Daily discharge estimation at ungauged river sites using remote sensing. Hydrol. Process. 2014, 28, 1043–1054. [Google Scholar] [CrossRef]
- Pavelsky, T.M. Using width-based rating curves from spatially discontinuous satellite imagery to monitor river discharge. Hydrol. Process. 2014, 28, 3035–3040. [Google Scholar] [CrossRef]
- Paris, A.; Dias de Paiva, R.; Santos da Silva, J.; Medeiros Moreira, D.; Calmant, S.; Garambois, P.-A.; Collischonn, W.; Bonnet, M.-P.; Seyler, F. Stage-discharge rating curves based on satellite altimetry and modeled discharge in the Amazon basin. Water Resour. Res. 2016, 52, 3787–3814. [Google Scholar] [CrossRef]
- Bjerklie, D.M.; Birkett, C.M.; Jones, J.W.; Carabajal, C.; Rover, J.A.; Fulton, J.W.; Garambois, P.-A. Satellite remote sensing estimation of river discharge: Application to the Yukon River Alaska. J. Hydrol. 2018, 561, 1000–1018. [Google Scholar] [CrossRef]
- Bogning, S.; Frappart, F.; Blarel, F.; Niño, F.; Mahé, G.; Bricquet, J.-P.; Seyler, F.; Onguéné, R.; Etamé, J.; Paiz, M.-C.; et al. Monitoring water levels and discharges using radar altimetry in an ungauged river basin: The case of the Ogooué. Remote Sens. 2018, 10, 350. [Google Scholar] [CrossRef]
- Moramarco, T.; Barbetta, S.; Bjerklie, D.M.; Fulton, J.W.; Tarpanelli, A. River bathymetry estimate and discharge assessment from remote sensing. Water Resour. Res. 2019, 55, 6692–6711. [Google Scholar] [CrossRef]
- Birkett, C.M. Contribution of the TOPEX NASA radar altimeter to the global monitoring of large rivers and wetlands. Water Resour. Res. 1998, 34, 1223–1239. [Google Scholar] [CrossRef]
- Birkett, C.M.; Mertes, L.A.K.; Dunne, T.; Costa, M.H.; Jasinski, M.J. Surface water dynamics in the Amazon Basin: Application of satellite radar altimetry. J. Geophys. Res. 2002, 107, 8059. [Google Scholar] [CrossRef]
- Kouraev, A.V.; Zakharova, E.A.; Samain, O.; Mognard, N.M.; Cazenave, A. Ob’ river discharge from TOPEX/Poseidon satellite altimetry (1992–2002). Remote Sens. Environ. 2004, 93, 238–245. [Google Scholar] [CrossRef]
- Papa, F.; Bala, S.K.; Kumar Pandey, R.; Durand, F.; Rahman, A.; Rossow, W.B. Ganga-Brahmaputra River discharge. Geophys. Res. 2012, 117, C11021. [Google Scholar] [CrossRef]
- Tulbure, M.G.; Broich, M. Spatiotemporal dynamic of surface water bodies using Landsat time-series data from 1999 to 2011. ISPRS J. Photogramm. Remote Sens. 2013, 79, 44–52. [Google Scholar] [CrossRef]
- Gleason, C.J.; Smith, L.C. Toward global mapping of river discharge using satellite images and at-many-stations hydraulic geometry. Proc. Natl. Acad. Sci. USA 2014, 111, 4788–4791. [Google Scholar] [CrossRef]
- Kim, J.-W.; Lu, Z.; Jones, J.W.; Shum, C.K.; Lee, H.; Jia, Y. Monitoring Everglades freshwater marsh water level using L-band synthetic aperture radar backscatter. Remote Sens. Environ. 2014, 150, 66–81. [Google Scholar] [CrossRef]
- Jones, J.W. Efficient wetland surface water detection and monitoring via Landsat: Comparison with in situ data from the Everglades Depth Estimation Network. Remote Sens. 2015, 7, 12503–12538. [Google Scholar] [CrossRef]
- Carroll, M.; Wooten, M.; DiMiceli, C.; Sohlberg, R.; Kelly, M. Quantifying surface water dynamics at 30 meter spatial resolution in the North American high northern latitudes 1991–2011. Remote Sens. 2016, 8, 622. [Google Scholar] [CrossRef]
- Brakenridge, G.R.; Nghiem, S.V.; Anderson, E.; Mic, R. Orbital microwave measurement of river discharge and ice status. Water Resour. Res. 2007, 43, W04405. [Google Scholar] [CrossRef]
- Durand, M.; Neal, J.; Rodríguez, E.; Andreadis, K.M.; Smith, L.C.; Yoon, Y. Estimating reach-averaged discharge for the River Severn from measurements of river water surface elevation and slope. J. Hydrol. 2014, 511, 92–104. [Google Scholar] [CrossRef]
- Biancamaria, S.; Lettenmaier, D.P.; Pavelsky, T. The SWOT Mission and its capabilities for land hydrology. Surv. Geophys. 2015, 37, 307–337. [Google Scholar] [CrossRef]
- Garambois, P.-A.; Monnier, J. Inference of effective river properties from remotely sensed observations of water surface. Adv. Water Resour. 2015, 79, 103–120. [Google Scholar] [CrossRef]
- Bonnema, M.G.; Sikder, S.; Hossain, F.; Durand, M.; Gleason, C.J.; Bjerklie, D.M. Benchmarking wide swath altimetry-based river discharge estimation algorithms for the Ganges river system. Water Resour. Res. 2016, 52, 2439–2461. [Google Scholar] [CrossRef]
- Durand, M.; Gleason, C.J.; Garambois, P.A.; Bjerklie, D.M.; Smith, L.C.; Roux, H.; Rodriguez, E.; Bates, P.D.; Pavelsky, T.M.; Monnier, J.; et al. An intercomparison of remote sensing river discharge estimation algorithms from measurements of river height, width, and slope. Water Resour. Res. 2016, 52, 4527–4549. [Google Scholar] [CrossRef]
- National Aeronautics and Space Administration (NASA). SWOT Surface Water and Ocean Topography. Available online: https://swot.jpl.nasa.gov/home.htm (accessed on 17 July 2018).
- Costa, J.E.; Spicer, K.R.; Cheng, R.T.; Haeni, F.P.; Melcher, N.B.; Thurman, E.M.; Plant, W.J.; Keller, W.C. Measuring stream discharge by non-contact methods: A Proof-of-Concept Experiment. Geophys. Res. Lett. 2000, 27, 553–556. [Google Scholar] [CrossRef]
- Melcher, N.B.; Costa, J.E.; Haeni, F.P.; Cheng, R.T.; Thurman, E.M.; Buursink, M.; Spicer, K.R.; Hayes, E.; Plant, W.J.; Keller, W.C. River discharge measurements by using helicopter-mounted radar. Geophys. Res. Lett. 2002, 29, 41–44. [Google Scholar] [CrossRef]
- Fulton, J.W.; Anderson, I.E.; Chiu, C.-L.; Sommer, W.; Adams, J.D.; Moramarco, T.; Bjerklie, D.M.; Fulford, J.M.; Sloan, J.L. sUAS-based remote sensing of velocity and discharge using Doppler radar. (manuscript in preparation).
- Plant, W.J.; Keller, W.C.; Hayes, K. Measurement of river surface currents with coherent microwave systems. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1242–1257. [Google Scholar] [CrossRef]
- Costa, J.E.; Cheng, R.T.; Haeni, F.P.; Melcher, N.; Spicer, K.R.; Hayes, E.; Plant, W.; Hayes, K.; Teague, C.; Barrick, D. Use of radars to monitor stream discharge by noncontact methods. Water Resour. Res. 2006, 42, 14. [Google Scholar] [CrossRef]
- Fulton, J.W.; Ostrowski, J. Measuring real-time streamflow using emerging technologies: Radar, hydroacoustics, and the probability concept. J. Hydrol. 2008, 357, 1–10. [Google Scholar] [CrossRef]
- Boning, C.W. Policy Statement on Stage Accuracy; U.S. Geological Survey, Office of Surface Water Technical Memorandum 93.07; 1992. Available online: https://water.usgs.gov/admin/memo/SW/sw93.07.html (accessed on 14 February 2020).
- Sauer, V.B.; Meyer, R.W. Determination of Error in Individual Discharge Measurements; U.S. Geological Survey Open-File Report 92–144; U.S. Geological Survey: Reston, VA, USA, 1992; p. 21. [CrossRef]
- Kiang, J.E.; Gazoorian, C.; McMillan, H.; Coxon, G.; Le Coz, J.; Westerberg, I.K.; Belleville, A.; Sevrez, D.; Sikorska, A.E.; Petersen-Øverleir, A.; et al. A Comparison of Methods for Streamflow Uncertainty Estimation. Water Resour. Res. 2018, 54, 7149–7176. [Google Scholar] [CrossRef]
- Cohn, T.A.; Kiang, J.E.; Mason, R.R. Estimating Discharge Measurement Uncertainty Using the Interpolated Variance Estimator. J. Hydraul. Eng. 2013, 139, 502–510. [Google Scholar] [CrossRef]
- McMillan, H.; Krueger, T.; Freer, J. Benchmarking observational uncertainties for hydrology: Rainfall, river discharge and water quality. Hydrol. Process. 2012, 26, 4078–4111. [Google Scholar] [CrossRef]
- Welber, M.; Le Coz, J.; Laronne, J.B.; Zolezzi, G.; Zamler, D.; Dramais, G.; Hauet, A.; Salvaro, M. Field assessment of noncontact stream gauging using portable surface velocity radars (SVR). Water Resour. Res. 2016, 2, 1108–1126. [Google Scholar] [CrossRef]
- Sauer, V.B. Standards for the Analysis and Processing of Surface-Water Data and Information Using Electronic Methods; U.S. Geological Survey Water-Resources Investigations Report 01–4044; U.S. Geological Survey: Reston, VA, USA, 2002; p. 91.
- Levesque, V.A.; Oberg, K.A. Computing Discharge Using the Index Velocity Method; U.S. Geological Survey Techniques and Methods 3–A23; 2012; p. 148. Available online: https://pubs.usgs.gov/tm/3a23/ (accessed on 20 January 2019).
- Fulton, J.W. Guidelines for Siting and Operating Surface-Water Velocity Radars. Available online: https://my.usgs.gov/confluence/display/SurfBoard/Guidelines+for+Siting+and+Operating+Surface-water+Velocity+Radars (accessed on 25 June 2018).
- Moramarco, T.; Barbetta, S.; Tarpanelli, A. From surface flow velocity measurements to discharge assessment by the entropy theory. Water. 2017, 9, 120. [Google Scholar] [CrossRef]
- Parsons, D.R.; Jackson, P.R.; Czuba, J.A.; Engel, F.L.; Rhoads, B.L.; Oberg, K.A.; Best, J.L.; Mueller, D.S.; Johnson, K.K.; Riley, J.D. Velocity Mapping Toolbox (VMT): A processing and visualization suite for moving-vessel ADCP measurements. Earth Surf. Process. Landf. 2013, 38, 1244–1260. [Google Scholar] [CrossRef]
- U.S. Geological Survey (USGS), Office of Surface Water Hydroacoustics Page. Available online: https://hydroacoustics.usgs.gov/movingboat/WinRiverII.shtml (accessed on 30 January 2020).
- Chiu, C.-L.; Chiou, J.-D. Structure of 3-D Flow in rectangular open channels. J. Hydraul. Eng. 1986, 112, 1050–1068. [Google Scholar] [CrossRef]
- Chiu, C.-L. Entropy and probability concepts in hydraulics. J. Hydraul. Eng. 1987, 113, 583–600. [Google Scholar] [CrossRef]
- Chiu, C.-L. Velocity distribution in open channel flow. J. Hydraul. Eng. 1989, 115, 576–594. [Google Scholar] [CrossRef]
- Chiu, C.-L. Probability and Entropy Concepts in Fluid Flow Modeling and Measurement; National Taiwan University: Taipei, Taiwan, 15 March 1995. [Google Scholar]
- Chiu, C.-L.; Tung, N.C.; Hsu, S.M.; Fulton, J.W. Comparison and Assessment of Methods of Measuring Discharge in Rivers and Streams; Research Report No. CEEWR-4; Dept. of Civil & Environmental Engineering, University of Pittsburgh: Pittsburgh, PA, USA, 2001. [Google Scholar]
- Chiu, C.-L.; Tung, N.C. Velocity and regularities in open-channel flow. J. Hydraul. Eng. 2002, 128, 390–398. [Google Scholar] [CrossRef]
- Chiu, C.-L.; Hsu, S.M.; Tung, N.C. Efficient methods of discharge measurements in rivers and streams based on the probability concept. Hydrol. Process. Wiley Intersci. 2005, 19, 3935–3946. [Google Scholar] [CrossRef]
- Chiu, C.-L.; Hsu, S.-M. Probabilistic approach to modeling of velocity distributions in fluid flows. J. Hydrol. 2006, 316, 28–42. [Google Scholar] [CrossRef]
- Moramarco, T.; Dingman, S.L. On the theoretical velocity distribution and flow resistance in natural channels. J. Hydrol. 2017, 555, 777–785. [Google Scholar] [CrossRef]
- Moramarco, T.; Saltalippi, C.; Singh, V.P. Estimation of mean velocity in natural channel based on Chiu’s velocity distribution equation. J. Hydrol. Eng. 2004, 9, 42–50. [Google Scholar] [CrossRef]
- Fulton, J.W. Comparison of Conventional and Probability-Based Modeling of Open-Channel Flow in The Allegheny River, Pennsylvania, USA. Unpublished Thesis, Department of Civil and Environmental Engineering, University of Pittsburgh, Pittsburgh, PA, USA, April 1999. [Google Scholar]
- Lant, J.; Mueller, D.S. Stage Area Rating Application – AreaComp2, USGS. Office of Surface Water. 2012. Available online: http://hydroacoustics.usgs.gov/software/AreaComp2_Users_Guide.pdf (accessed on 21 January 2020).
- Chow, V.T.; Maidment, D.R.; Mays, L.W. Applied Hydrology, International Edition 1988; McGraw-Hill Inc.: Singapore, 1988; pp. 42–47. [Google Scholar]
- González, J.A.; Melching, C.S.; Oberg, K.A. Analysis of open-channel velocity measurements collected with an acoustic Doppler current profiler. Reprint from RIVERTECH 96. In Proceedings of the 1st International Conference On New/Emerging Concepts for Rivers Organized by the International Water Resources Association, Chicago, IL, USA, 22–26 September 1996. [Google Scholar]
- Murphy, E.C. Accuracy of Stream Measurements; Water-Supply and Irrigation Paper No. 95, Series M, General Hydrographic Investigations 10; United States Government Printing Office: Washington, DC, USA, 1904; pp. 58–163.
- Guo, J.; Julien, P.Y. Application of the modified log-wake law in open-Channels. J. Appl. Fluid Mech. 2008, 1, 17–23. [Google Scholar]
- Jarrett, R.D. Wading measurements of vertical velocity profiles. Geomorphology 1991, 4, 243–247. [Google Scholar] [CrossRef]
- Kundu, S.; Ghoshal, K. Velocity Distribution in Open Channels: Combination of Log-law and Parabolic-law. World Acad. Sci. Eng. Technol. Int. J. Math. Comput. Phys. Electr. Comput. Eng. 2012, 6, 1234–1241. [Google Scholar]
- Wiberg, P.L.; Smith, J.D. Velocity distribution and bed roughness in high-gradient streams. Water Resour. Res. 1991, 27, 825–838. [Google Scholar] [CrossRef]
- Yang, S.-Q.; Xu, W.-L.; Yu, G.-L. Velocity distribution in gradually accelerating free surface flow. Adv. Water Resour. 2006, 29, 1969–1980. [Google Scholar] [CrossRef]
- Blodgett, J.C. Rock Riprap Design for Protection of Stream Channels Near Highway Structures, Volume 1: Hydraulic Characteristics of Open Channels; U.S. Geological Survey Water-Resources Investigations Report 86–4127; U.S. Geological Survey: Reston, VA, USA, 1986; p. 60. [CrossRef]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 623–656. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019; Available online: https://www.R-project.org/ (accessed on 9 February 2020).
- Zambrano-Bigiarini, M. HydroGOF: Goodness-of-Fit Functions for Comparison of Simulated and Observed Hydrological Time Series. R Package Version 0.3–10. 2017. Available online: http://hzambran.github.io/hydroGOF/ (accessed on 9 February 2020).
- Fulton, J.W.; Mcdermott, W.R.; Mason, C.A. Radar-based field measurements of surface velocity and discharge from 10 USGS streamgages for various locations in the United States, 2002–2019. U.S. Geological Survey data release, (manuscript in review).
- U.S. Geological Survey. USGS Water Data for the Nation; U.S. Geological Survey National Water Information System Database; 2016. Available online: https://waterdata.usgs.gov/nwis (accessed on 15 November 2016).
- Criss, R.E.; Winston, W.E. Do Nash values have value? Discussion and alternate proposals. Hydrol. Process. 2008, 22, 2723–2725. [Google Scholar] [CrossRef]
- Moriasi, D.N.; Arnold, J.G.; Van Liew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Am. Soc. Agric. Biol. Eng. 2007, 50, 885–900. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.532.2506&rep=rep1&type=pdf (accessed on 14 February 2020).
- Muleta, M.K. Model performance sensitivity to objective function during automated Calibrations. J. Hydrol. Eng. 2012, 17, 756–767. [Google Scholar] [CrossRef]
- Bechle, A.J.; Wu, C.H. An entropy-based surface velocity method for estuarine discharge measurement. Water Resour. Res. 2014, 50, 6106–6128. [Google Scholar] [CrossRef]
- Plant, W.J.; Keller, W.C. Evidence of Bragg scattering in microwave Doppler spectra of sea return. J. Geophys. Res. 1990, 95, 16299–16310. [Google Scholar] [CrossRef]
- Plant, W.J. Bragg Scattering of Electromagnetic Waves from The air/sea Interface, in Surface Waves and Fluxes: Current Theory and Remote Sensing; Geernaert, G.L., Plant, W.J., Eds.; Kluwer: Dordrecht, The Netherlands, 1990; Volume 2, p. 336. [Google Scholar]
- Wright, J.W. A new model for sea clutter. IEEE Trans. Antennas Propag. 1968, AP-16, 217–223. [Google Scholar] [CrossRef]
- Plant, W.J.; Wright, J.W. Phase speeds of upwind and downwind traveling short gravity waves. J. Geophys. Res. 1980, 85, 3304–3310. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| USGS Streamgage | USGS Streamgage Identification Number | Setting | DA (km2) | Radar Deployment Period | ||
|---|---|---|---|---|---|---|
| Start | End | Duration (Months) | ||||
| Blackfoot River near Bonner, Montana | 12340000 | High-gradient mtn stream | 5930 | May 2013 | Aug 2013 | 4 |
| Cherry Creek at Denver, Colorado | 06713500 | Urban | 1060 | Aug 2017 | Apr 2019 | 19 |
| Clear Creek near Lawson, Colorado | 06716500 | High-gradient mtn stream | 381 | Apr 2019 | Sep 2019 | 6 |
| Gunnison River near Grand Junction, Colorado | 09152500 | Mixed | 20,500 | Aug 2018 | Aug 2019 | 12 |
| NF Shenandoah River near Strasburg, Virginia | 01634000 | Mixed | 1990 | Feb 2015 | Jan 2016 | 11 |
| Red River of the North at Grand Forks, North Dakota | 05082500 | Agricultural | 66,100 | Apr 2013 | May 2013 | < 1 |
| Rio Grande at Embed, New Mexico | 08279500 | Desert | 19,300 | Apr 2014 | Sep 2015 | 17 |
| Susquehanna River at Bloomsburg, Pennsylvania | 01538700 | Mixed | 27,400 | Apr 2011 | May 2011 | < 1 |
| Tanana River at Nenana, Alaska | 15515500 | Forest | 66,200 | May 2018 | Oct 2019 | 18 |
| Yellowstone River near Livingston, Montanan | 06192500 | High-gradient mtn stream | 9200 | May 2013 | Aug 2013 | 4 |
| USGS Streamgage | Number of Visits | Top Width (m) | Hydraulic Depth (m) | ||
|---|---|---|---|---|---|
| min | max | min | max | ||
| Blackfoot River near Bonner, Montana | 2 | 44 | 58 | 0.52 | 2.1 |
| Cherry Creek at Denver, Colorado | 6 | 7.3 | 13 | 0.19 | 0.82 |
| Clear Creek near Lawson, Colorado | 8 | 7.0 | 19 | 0.34 | 0.88 |
| Gunnison River near Grand Junction, Colorado | 1 | 49 | 85 | 0.09 | 2.9 |
| NF Shenandoah River near Strasburg, Virginia | 1 | 56 | 67 | 0.40 | 1.9 |
| Red River of the North at Grand Forks, North Dakota | 2 | 87 | 160 | 5.5 | 7.0 |
| Rio Grande at Embed, New Mexico | 2 | 20 | 37 | 0.61 | 0.85 |
| Susquehanna River at Bloomsburg, Pennsylvania | 6 | 320 | 340 | 2.7 | 5.2 |
| Tanana River at Nenana, Alaska | 7 | 38 | 380 | 1.3 | 3.7 |
| Yellowstone River near Livingston, Montana | 1 | 40 | 104 | 0.98 | 1.9 |
| USGS Streamgage | Stage-Discharge (m3/s) | Streamflow Exceedance | ||
|---|---|---|---|---|
| min | med | max | % exceeded | |
| Blackfoot River near Bonner, Montana | 17.8 | 52.6 | 168 | 5.10 |
| Cherry Creek at Denver, Colorado | 0.12 | 0.79 | 41.6 | 0.00 |
| Clear Creek near Lawson, Colorado | 1.19 | 6.41 | 32.1 | 0.48 |
| Gunnison River near Grand Junction, Colorado | 13.2 | 32.4 | 486 | 0.67 |
| NF Shenandoah River near Strasburg, Virginia | 2.10 | 11.2 | 190 | 0.46 |
| Red River of the North at Grand Forks, North Dakota | 308 | 875 | 1,240 | 0.40 |
| Rio Grande at Embudo, New Mexico | 7.65 | 17.1 | 117 | 3.00 |
| Susquehanna River at Bloomsburg, Pennsylvania | 1,250 | 1,970 | 4,950 | 0.00 |
| Tanana River at Nenana, Alaska | 452 | 1,410 | 2,850 | 0.48 |
| Yellowstone River near Livingston, Montana | 57.1 | 78.1 | 113 | 5.40 |
| USGS Streamgage | Date Collected | PC Metrics | PC | Conv | % error in umean | ||||
|---|---|---|---|---|---|---|---|---|---|
| M (dim) | ϕ (dim) | uD (m/s) | umax (m/s) | Water Depth at y-axis (m) | umean (m/s) | umean (m/s) | |||
| Blackfoot River near Bonner, Montana | 05-20-2013 | 2.10 | 0.664 | 2.70 | 2.70 | 2.57 | 1.79 | 1.78 | 1.1 |
| Cherry Creek at Denver, Colorado | 08-25-2017 | 2.32 | 0.678 | 0.75 | 0.75 | 0.26 | 0.51 | 0.50 | 1.2 |
| Clear Creek near Lawson, Colorado | 04-19-2019 | 0.883 | 0.573 | na | 1.09 | 0.43 | 0.62 | 0.61 | 2.3 |
| Gunnison River near Grand Junction, Colorado | 03-27-2019 | 0.266 | 0.522 | 1.12 | 1.02 | 1.55 | 0.53 | 0.51 | 4.9 |
| NF Shenandoah River near Strasburg, Virginia | 12-04-2014 | 1.03 | 0.584 | 0.45 | 0.49 | 0.77 | 0.29 | 0.31 | −8.0 |
| Red River of the North at Grand Forks, North Dakota | 02-05-2004 | 0.60 | 0.550 | na | 0.09 | 6.34 | 0.05 | 0.05 | −0.1 |
| Rio Grande at Embudo, New Mexico | 03-21-2014 | 1.49 | 0.620 | 1.45 | 1.45 | 0.70 | 0.90 | 0.87 | 3.2 |
| Susquehanna River at Bloomsburg, Pennsylvania | 06-27-2002 | 4.35 | 0.783 | 0.73 | 0.73 | 1.83 | 0.57 | 0.59 | −4.0 |
| Tanana River at Nenana, Alaska | 05-07-2015 | 2.98 | 0.718 | 1.41 | 1.41 | 2.84 | 1.01 | 1.14 | −11 |
| Yellowstone River near Livingston, Montana | 05-22-2013 | 2.92 | 0.715 | 2.96 | 2.96 | 2.86 | 2.11 | 2.13 | −0.7 |
| Average percent error | −1.1 | ||||||||
| Absolute average percent error | 3.6 | ||||||||
| USGS Streamgage | Date Collected | Method | Discharge (m3/s) | % Error in Discharge | |
|---|---|---|---|---|---|
| PC | Conventional | ||||
| Blackfoot River near Bonner, Montana | 05-20-2013 | ADCP | 144 | 142 | 1.1 |
| Cherry Creek at Denver, Colorado | 08-25-2017 | FT | 0.85 | 0.84 | 1.2 |
| Clear Creek near Lawson, Colorado | 04-19-2019 | FT | 1.43 | 1.39 | 2.3 |
| Gunnison River near Grand Junction, Colorado | 03-27-2019 | ADCP | 30.5 | 29.1 | 4.9 |
| NF Shenandoah River near Strasburg, Virginia | 12-04-2014 | ADCP | 11.7 | 12.7 | −8.0 |
| Red River of the North at Grand Forks, North Dakota | 02-05-2004 | ADCP | 12.6 | 12.6 | −0.1 |
| Rio Grande at Embudo, New Mexico | 03-21-2014 | ADCP | 19.3 | 18.7 | 3.2 |
| Susquehanna River at Bloomsburg, Pennsylvania | 06-27-2002 | AA | 292 | 306 | −4.0 |
| Tanana River at Nenana, Alaska | 05-07-2015 | ADCP | 615 | 690 | −11 |
| Yellowstone River near Livingston, Montana | 05-22-2013 | ADCP | 208 | 209 | −0.7 |
| Average percent error | −1.1 | ||||
| Absolute average percent error | 3.6 | ||||
| USGS Streamgage | Radar-Derived Surface Velocity (m/s) | ||
|---|---|---|---|
| min | med | Max | |
| Blackfoot River near Bonner, Montana | 0.66 | 2.03 | 3.01 |
| Cherry Creek at Denver, Colorado | 0.30 | 0.62 | 3.33 |
| Clear Creek near Lawson, Colorado | 0.84 | 1.85 | 3.78 |
| Gunnison River near Grand Junction, Colorado | 0.99 | 1.16 | 3.37 |
| NF Shenandoah River near Strasburg, Virginia | 0.41 | 0.66 | 1.76 |
| Red River of the North at Grand Forks, North Dakota | 0.55 | 1.19 | 1.78 |
| Rio Grande at Embudo, New Mexico | 0.51 | 0.92 | 2.88 |
| Susquehanna River at Bloomsburg, Pennsylvania | 0.64 | 1.62 | 2.53 |
| Tanana River at Nenana, Alaska | 0.70 | 1.81 | 3.02 |
| Yellowstone River near Livingston, Montana | 1.39 | 2.49 | 3.84 |
| USGS Streamgage | Radar-Derived Discharge (m3/s) | Stage-Discharge (m3/s) | ||||
|---|---|---|---|---|---|---|
| min | med | max | min | med | max | |
| Blackfoot River near Bonner, Montana | 14.3 | 63.5 | 177 | 17.8 | 52.6 | 168 |
| Cherry Creek at Denver, Colorado | 0.17 | 0.73 | 38.6 | 0.12 | 0.79 | 41.6 |
| Clear Creek near Lawson, Colorado | 1.40 | 6.98 | 38.2 | 1.19 | 6.41 | 32.1 |
| Gunnison River near Grand Junction, Colorado | 21.0 | 31.1 | 450 | 13.2 | 32.4 | 486 |
| NF Shenandoah River near Strasburg, Virginia | 2.87 | 9.69 | 167 | 2.10 | 11.2 | 190 |
| Red River of the North at Grand Forks, North Dakota | 213 | 916 | 1470 | 308 | 875 | 1250 |
| Rio Grande at Embudo, New Mexico | 5.77 | 16.8 | 138 | 7.65 | 17.1 | 117 |
| Susquehanna River at Bloomsburg, Pennsylvania | 603 | 1780 | 4890 | 1250 | 1970 | 4950 |
| Tanana River at Nenana, Alaska | 381 | 1280 | 2640 | 452 | 1410 | 2850 |
| Yellowstone River near Livingston, Montana | 53.3 | 71.9 | 102 | 57.1 | 78.1 | 113 |
| USGS streamgage | n | MAE (m3/s) | PBIAS | NSE | (log) NSE | VE |
|---|---|---|---|---|---|---|
| Blackfoot River near Bonner, Montana | 7499 | 9.12 | 13.5 | 0.95 | 0.88 | 0.86 |
| Cherry Creek at Denver, Colorado | 151,161 | 0.13 | −9.2 | 0.91 | 0.90 | 0.86 |
| Clear Creek near Lawson, Colorado | 13,222 | 1.91 | 12 | 0.85 | 0.96 | 0.81 |
| Gunnison River near Grand Junction, Colorado | 34,628 | 7.85 | −8.6 | 0.98 | 0.99 | 0.90 |
| NF Shenandoah River near Strasburg, Virginia | 29,563 | 2.53 | −13.9 | 0.95 | 0.97 | 0.85 |
| Red River of the North at Grand Forks, North Dakota | 1558 | 122 | −3.0 | 0.71 | 0.70 | 0.86 |
| Rio Grande at Embudo, New Mexico | 41,219 | 1.13 | −2.9 | 0.97 | 0.97 | 0.94 |
| Susquehanna River at Bloomsburg, Pennsylvania | 448 | 286 | −10.6 | 0.79 | 0.61 | 0.87 |
| Tanana River at Nenana, Alaska | 28,047 | 247 | −10.6 | 0.59 | 0.60 | 0.82 |
| Yellowstone River near Livingston, Montana | 3099 1 | 6.17 | −7.8 | 0.79 | 0.81 | 0.92 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fulton, J.W.; Mason, C.A.; Eggleston, J.R.; Nicotra, M.J.; Chiu, C.-L.; Henneberg, M.F.; Best, H.R.; Cederberg, J.R.; Holnbeck, S.R.; Lotspeich, R.R.; et al. Near-Field Remote Sensing of Surface Velocity and River Discharge Using Radars and the Probability Concept at 10 U.S. Geological Survey Streamgages. Remote Sens. 2020, 12, 1296. https://doi.org/10.3390/rs12081296
Fulton JW, Mason CA, Eggleston JR, Nicotra MJ, Chiu C-L, Henneberg MF, Best HR, Cederberg JR, Holnbeck SR, Lotspeich RR, et al. Near-Field Remote Sensing of Surface Velocity and River Discharge Using Radars and the Probability Concept at 10 U.S. Geological Survey Streamgages. Remote Sensing. 2020; 12(8):1296. https://doi.org/10.3390/rs12081296
Chicago/Turabian StyleFulton, John W., Christopher A. Mason, John R. Eggleston, Matthew J. Nicotra, Chao-Lin Chiu, Mark F. Henneberg, Heather R. Best, Jay R. Cederberg, Stephen R. Holnbeck, R. Russell Lotspeich, and et al. 2020. "Near-Field Remote Sensing of Surface Velocity and River Discharge Using Radars and the Probability Concept at 10 U.S. Geological Survey Streamgages" Remote Sensing 12, no. 8: 1296. https://doi.org/10.3390/rs12081296
APA StyleFulton, J. W., Mason, C. A., Eggleston, J. R., Nicotra, M. J., Chiu, C.-L., Henneberg, M. F., Best, H. R., Cederberg, J. R., Holnbeck, S. R., Lotspeich, R. R., Laveau, C. D., Moramarco, T., Jones, M. E., Gourley, J. J., & Wasielewski, D. (2020). Near-Field Remote Sensing of Surface Velocity and River Discharge Using Radars and the Probability Concept at 10 U.S. Geological Survey Streamgages. Remote Sensing, 12(8), 1296. https://doi.org/10.3390/rs12081296