Landslide Prediction Method Based on a Ground-Based Micro-Deformation Monitoring Radar

 , , ,
, , ,
Abstract
1. Introduction
2. Study Area and Monitoring System
2.1. Study Area
- Shotcrete area. This area is about 450 m wide and 100 m high, with its highest point about 500 m from the surface. It has collapsed in the past, leaving exposed rock walls and posing a risk of secondary collapse, so it is the main part of slope monitoring. The slope manager reinforced the wall by spraying concrete on the surface and erecting a protective net to prevent rocks from falling.
- Steep precipice. This is an area that has not collapsed, but it is steep. There is a small amount of vegetation attached to the precipice surface, and there is also a risk of slipping. Besides, as there are several large pieces of drilling equipment directly below the precipice, this will pose a great threat to the safety of the equipment and the workers, considering rocks above the slope.
- Soft layer area. This area is mainly composed of soft clay and some remaining rock blocks. Although its slope is relatively small, about 30°–40°, it is more susceptible to rain due to its soft texture. If giant rocks on the slope come loose and slide along the slope, it can also pose a great threat to the safety of the equipment and personnel below.
- Landslide area. This area belongs to the soft layer area. The whole monitoring region suffered multiple consecutive heavy rains in mid-July 2019, resulting in increased soil moisture content and decreased stability, and eventually inducing landslides. The range of this landslide is about 40 m horizontally and 120 m vertically along the slope. Fortunately, the landslide did not cause casualties or property damage.
- Ground construction area. This area is mainly used for some ground construction. In addition, it is used to house the equipment and materials needed for the slope management project, as well as for the livelihood of the staff.
- Drilling area. This area is close to the soft layer and steep precipice. There are many drilling rigs in this area, and they are building diaphragm wall day and night. This is also the equipment most threatened by the surrounding environment.
2.2. Monitoring System
3. Materials and Methods
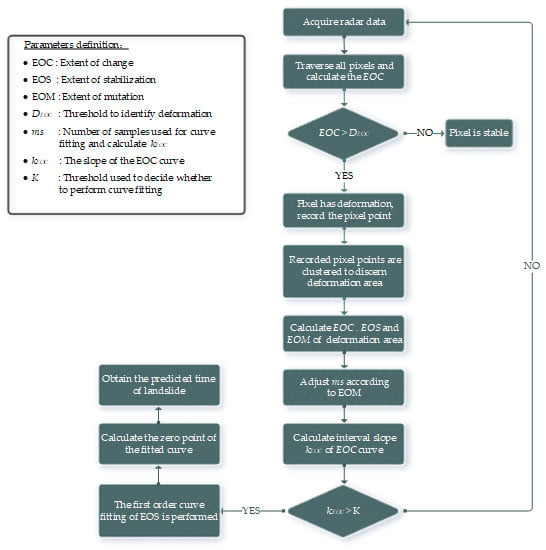
3.1. Data-Processing Flow
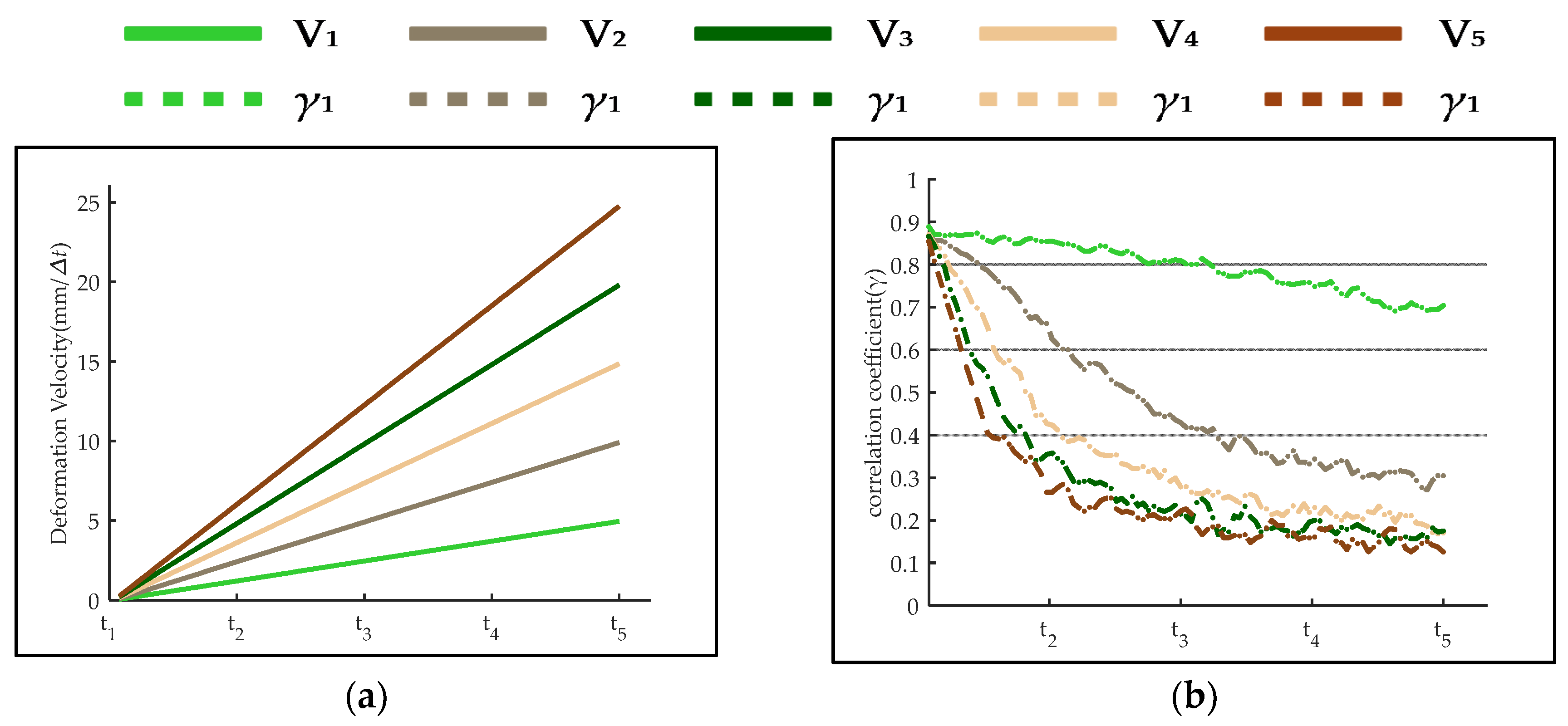
3.2. Deformation Velocity and Coherence Coefficient
3.3. EOC, EOS, and EOM
3.4. Discern Deformation Area
3.5. Landslide Prediction
4. Results
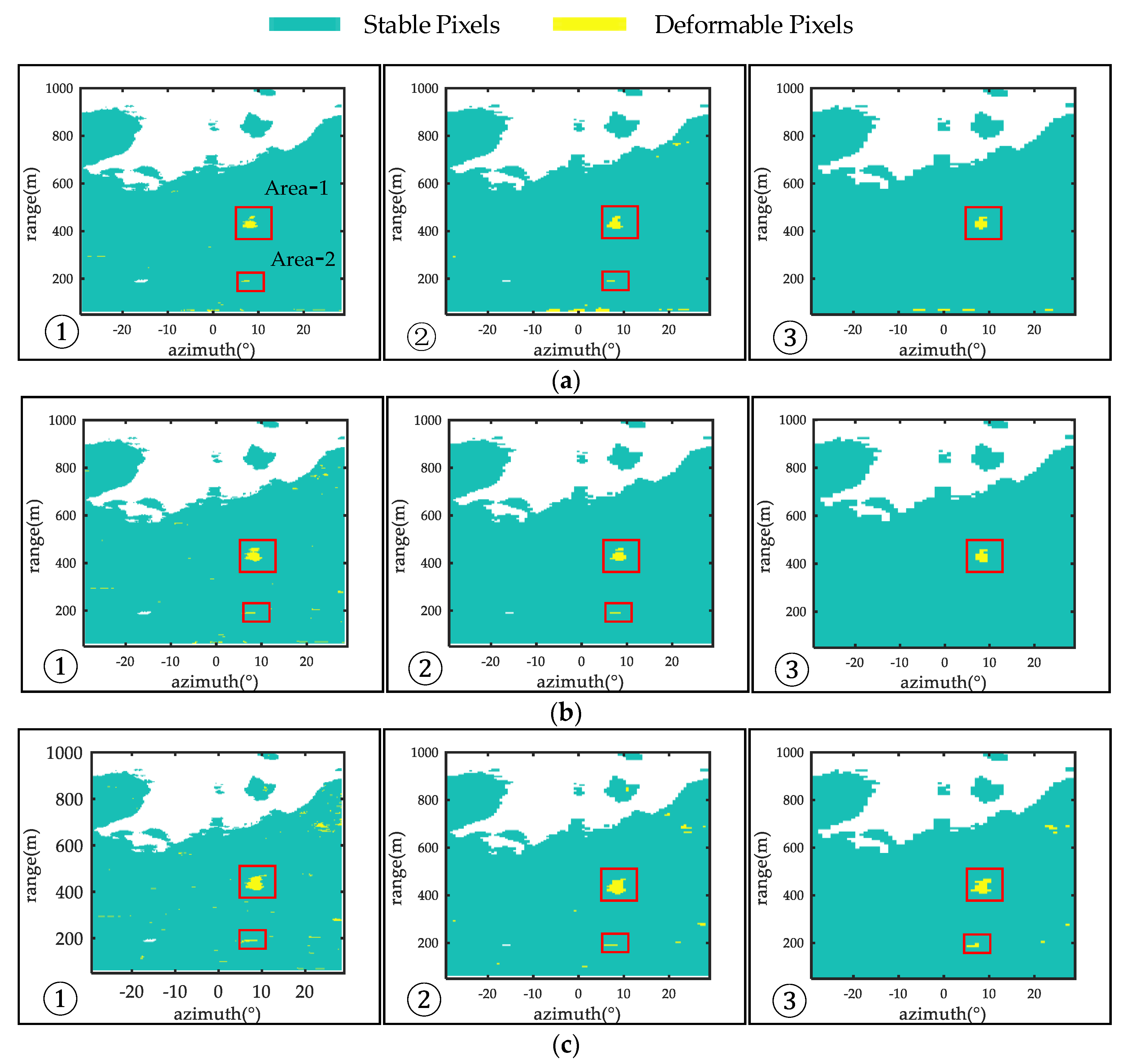
4.1. Area Discernment Result
4.2. Landslide Prediction Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lin, Q.; Wang, Y. Spatial and temporal analysis of a fatal landslide inventory in China from 1950 to 2016. Landslides 2018, 15, 2357–2372. [Google Scholar] [CrossRef]
- Zhang, S.F.; Wang, Y.F.; Jia, B. Spatial-temporal changes and influencing factors of geologic disasters from 2005 to 2016 in China. J. GeoInf. Sci. 2017, 19, 1567–1574. [Google Scholar]
- Froude, M.J.; Petley, D. Global fatal landslide occurrence from 2004 to 2016. Nat. Hazards Earth Syst. Sci. 2018, 18, 2161–2181. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, N.N.; Sun, Z.; Fei, W. The major domestic natural disasters in 2017. Disaster Reduct. China 2018, 5, 38–41. [Google Scholar]
- Liu, N.J.; Zhang, D.; Wang, Y. Inventory of major domestic natural disasters in 2018. Disaster Reduct. China 2019, 5, 18–23. [Google Scholar]
- The Ministry of Emergency Management Announce the Ten Major Domestic Natural Disasters in 2019. Available online: https://www.mem.gov.cn/xw/bndt/202001/t20200112_343410.shtml (accessed on 12 January 2020).
- Xu, Q.; Tang, M.G.; Huang, R.Q. Monitoring, Early Warning and Emergency Disposal of Large Landslides; Science Press: Beijing, China, 2015. [Google Scholar]
- Zao, C.Y.; Liu, X.J. Research on landslide identification, monitoring and failure model with InSAR technique in Heifangtai, Gansu. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 996–1007. [Google Scholar]
- Xu, Q.; Dong, X.J.; Li, W.L. Integrated space-air-ground early detection, monitoring and warning system for potential catastrophic geohazards. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 957–966. [Google Scholar]
- Ge, D.Q.; Dai, K.R. Early identification of serious geological hazards with integrated remote sensing technologies: Thoughts and recommendations. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 949–956. [Google Scholar]
- Atzeni, C.; Barla, M.; Pieraccini, M. Early warning monitoring of natural and engineered slopes with ground-based synthetic-aperture radar. Rock Mech. Rock Eng. 2015, 48, 235–246. [Google Scholar] [CrossRef]
- Intrieri, E.; Carlà, T.; Farina, P.; Bardi, F.; Ketizmen, H.; Casagli, N. Satellite interferometry as a tool for early warning and aiding decision making in an open—Pit mine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 5248–5258. [Google Scholar] [CrossRef]
- Zeng, T.; Deng, Y.K. Development state and application examples of ground-based differential interferometric radar. J. Radars 2019, 8, 154–170. [Google Scholar]
- Carlà, T.; Intrieri, E.; Raspini, F.; Bardi, F.; Farina, P.; Ferretti, A.; Colombo, D.; Novali, F.; Casagli, N. Perspectives on the prediction of catastrophic slope failures from satellite InSAR. Sci. Rep. 2019, 9, 14137. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Li, Z.H.; Hoey, T. Using advanced InSAR time series techniques to monitor landslide movements in Badong of the Three Gorges region, China. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 253–264. [Google Scholar] [CrossRef]
- Florentino, A.; Charapaqui, S.; De La Jara, C.; Milla, M. Implementation of a ground-based synthetic aperture radar (GB-SAR) for landslide monitoring: System description and preliminary results. In Proceedings of the IEEE XXIII International Congress on Electronics, Piura, Peru, 2–5 August 2016. [Google Scholar]
- Shi, X.G.; Zhang, L. Detection and characterization of active slope deformations with Sentinel-1 InSAR analyses in the southwest area of Shanxi, China. Remote Sens. 2020, 12, 392. [Google Scholar] [CrossRef]
- Li, W.L.; Xu, Q. Historical retrospection of deformation of large rocky landslides and its enlightenment. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 1043–1053. [Google Scholar]
- Peng, L.; Xu, S.N.; Peng, J.H. Research on development characteristics and size of landslides in the Three Gorges area. Geoscience 2014, 28, 1077–1086. [Google Scholar]
- Luo, W.Q.; Lu, F.A. Evolution stage division of landslide based on analysis of multivariate time series. Earth Sci. 2016, 41, 711–717. [Google Scholar]
- Graham, J.D.; Erik, E. Development of an early-warning time-of-failure analysis methodology for open-pit mine slopes utilizing ground-based slope stability radar monitoring data. Can. Geotech. J. 2015, 52, 515–529. [Google Scholar]
- Qin, S.Q.; Wang, Y.Y.; Ma, P. Exponential laws of critical displacement evolution for landslides and avalanches. Chin. J. Rock Mech. Eng. 2010, 29, 873–880. [Google Scholar]
- Zao, C.Y.; Liu, X.J. Characteristics of landslide displacement-time curve by physical simulation experiment. J. Eng. Geol. 2015, 3, 401–407. [Google Scholar]
- Chen, X.P.; Zhang, Q.Y.; Liu, D.W. Deformation statistical regression analysis model of slope and its application. Chin. J. Rock Mech. Eng. 2008, 27, 3673–3679. [Google Scholar]
- Voight, B.A. Method for prediction of volcanic eruptions. Nature 1988, 332, 125–130. [Google Scholar] [CrossRef]
- Fukuzono, T. A new method for predicting the failure time of a slope. In Proceedings of the Fourth International Conference and Field Workshop on Landslides, Japan Landslide Society, Tokyo, Japan, 23–31 August 1985; pp. 145–150. [Google Scholar]
- Carlà, T.; Intrieri, E.; Di Traglia, F.; Nolesini, T.; Giovanni Gigli, G.; Casagli, N. Guidelines on the use of inverse velocity method as a tool for setting alarm thresholds and forecasting landslides and structure collapses. Landslides 2017, 14, 517–534. [Google Scholar] [CrossRef]
- Xu, Q.; Li, W.L.; Dong, X.J. The Xinmocun landslide on 24 June 2017 in Maoxian, Sichuan: Characteristics and failure mechanism. Chin. J. Rock Mech. Eng. 2017, 36, 2612–2628. [Google Scholar]
- Pieraccini, M.; Miccinesi, L. Ground-Based Radar Interferometry: A Bibliographic Review. Remote Sens. 2019, 11, 1029. [Google Scholar] [CrossRef]
- Bardi, F.; Raspini, F.; Frodella, W.; Lombardi, L.; Nocentini, M.; Gigli, G.; Morelli, S.; Corsini, A.; Casagli, N. Monitoring the rapid-moving reactivation of earth flows by means of GB-InSAR: The April 2013 Capriglio landslide (northern Appennines, Italy). Remote Sens. 2017, 9, 165. [Google Scholar] [CrossRef]
- Tarchi, D.; Casagli, N.; Fanti, R. Landslide monitoring by using ground-based SAR interferometry: An example of application to the Tessina landslide in Italy. Eng. Geol. 2003, 68, 15–30. [Google Scholar] [CrossRef]
- Macedo, K.A.; Ramos, F.L.; Gaboardi, C. A compact ground-based interferometric radar for landslide monitoring: The Xerém experiment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 99, 1–12. [Google Scholar] [CrossRef]
- Traglia, F.; Intrieri, E.; Nolesini, T.; Bardi, F.; Del Ventisette, C.; Ferrigno, F.; Frangioni, S.; Frodella, W.; Gigli, G.; Lotti, A.; et al. The ground-based InSAR monitoring system at Stromboli volcano: Linking changes in displacement rate and intensity of persistent volcanic activity. Bull. Volcanol. 2014, 76, 1–18. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, C. Research on DInSAR Method Based on Coherent Target; Science Press: Beijing, China, 2009; pp. 12–28. [Google Scholar]
- Tofani, V.; Raspini, F.; Catani, F.; Casagli, N. Persistent scatterer interferometry (PSI) technique for landslide characterization and monitoring. Remote Sens. 2013, 5, 1045–1065. [Google Scholar] [CrossRef]
- Tian, X.; Liao, M.S. The analysis of conditions for InSAR in the field of deformation monitoring. Chin. J. Geophys. 2013, 56, 812–823. [Google Scholar]
- Huang, Z.S.; Sun, J.P.; Li, Q.; Tan, W.X. Time- and space-varying atmospheric phase correction in discontinuous ground-based synthetic aperture radar deformation monitoring. Sensors 2018, 18, 3883. [Google Scholar] [CrossRef] [PubMed]
- Zheng, X.; Yang, X.; Ma, H.; Ren, G.; Zhang, K.; Yang, F.; Li, C. Integrated Ground-Based SAR Interferometry, Terrestrial Laser Scanner, and Corner Reflector Deformation Experiments. Sensors 2018, 18, 4401. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.H.; Sun, J.Q.; Wang, J. Real-time prediction for 2018 JJA extreme precipitation and landslides. Trans. Atmos. Sci. 2019, 42, 93–99. [Google Scholar]
- Luo, Y.; He, S.M.; He, J.C. Effect of rainfall patterns on stability of shallow landslide. Earth Sci. 2014, 39, 1357–1363. [Google Scholar]
- Oliver, C.; Shaun, Q.G. Understanding Synthetic Aperture Radar Images; Artech House: Boston, MA, USA, 1998; pp. 75–119. [Google Scholar]
- Touzi, R.; Lopes, A. Coherence estimation for SAR imagery. IEEE Trans. Geosci. Remote Sens. 1999, 37, 135–149. [Google Scholar] [CrossRef]
- Guo, L.P.; Yue, J.P. Analysis coherence effected by baseline and time interval. Bull. Surv. Mapp. 2018, 7, 9–12. [Google Scholar]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef]
- Kuga, Y.; Phu, P. Experimental research of millimeter wave scattering in discrete random media and from rough surfaces. Prog. Electromagn. Res. 1996, 14, 37–88. [Google Scholar]
- Wang, Y.H.; Yu, Y.; Zang, Y.M. Investigation on synthetic aperture radar imaging simulation of oceanic wind waves. Trans. Oceanol. Limnol. 2019, 6, 41–47. [Google Scholar]
- Guo, R.; Li, S.M.; Chen, Y.N. A method based on SBAS-InSAR for comprehensive identification of potential goaf landslide. J. GeoInf. Sci. 2019, 21, 1109–1120. [Google Scholar]
- Tripolitsiotis, A.; Steiakakis, C.; Papadaki, E. Complementing geotechnical slope stability and land movement analysis using satellite DInSAR. Cent. Eur. J. Geosci. 2014, 6, 56–66. [Google Scholar] [CrossRef]
- Zhang, L.; Liao, M.S.; Dong, J. Early detection of landslide hazards in mountainous areas of west China using time series SAR Interferometry-a case study of Danba, Sichuan. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 2039–2049. [Google Scholar]
- Jaedicke, C.; Eeckhaut, M.V.; Nadim, F. Identification of landslide hazard and risk ‘hotspots’ in Europe. Bull. Eng. Geol. Environ. 2014, 73, 325–339. [Google Scholar] [CrossRef]
- Sun, J.L.; Ma, J.H.; Dong, G.F. Analysis of surface deformation characteristics and identification of potential landslides in Gaojiawan area. Geomat. Spat. Inf. Technol. 2019, 42, 99–103. [Google Scholar]
- Li, Q.Y.; Wang, N.C. Numerical Analysis; Tsinghua University Press: Beijing, China, 2008; pp. 73–78. [Google Scholar]
- Li, Z.H.; Song, C.; Yu, C. Application of satellite radar remote sensing to landslide detection and monitoring: Challenges and solutions. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 967–979. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Bandwidth | Operating Range | FOV (Field of View) | Repetition Time | Resolution |
|---|---|---|---|---|---|
| Ku | 500 MHz | 10 to 5 km | >60° (azi.) ×30° (ele.) | 8 min | 0.3 m (slant range direction) ×5.4 mrad (azimuth direction) |
| Frequency | Bandwidth | Simulation Range |
|---|---|---|
| Ku | 500 MHz | 10 m to 3 km |
| Time Window Width Δw (h) | Point Set Size (a × b) | Boundary of Deformation Area-1 | |
|---|---|---|---|
| Range (m) (Near/Far) | Azimuth (°) (Left/Right) | ||
| 4 | 10 × 1 | 404.2/457.2 | 6.7/10.0 |
| 4 | 20 × 2 | 404.2/458.1 | 6.7/10.0 |
| 4 | 30 × 3 | 401.1/455.1 | 7.3/9.7 |
| 8 | 10 × 1 | 400.2/454.5 | 6.1/10.6 |
| 8 | 20 × 2 | 404.2/458.1 | 6.7/10.0 |
| 8 | 30 × 3 | 402.4/463.2 | 7.0/10.6 |
| 12 | 10 × 1 | 349.5/469.2 | 6.1/10.6 |
| 12 | 20 × 2 | 386.4/464.4 | 6.4/10.6 |
| 12 | 30 × 3 | 401.1/464.4 | 6.4/10.6 |
| Δw(h) | Landslide Countdown (h) | ms = 10 | ms = 20 | ||
|---|---|---|---|---|---|
| Prediction Error of EOS (h) | Prediction Error of Inverse Velocity (h) | Prediction Error of EOS (h) | Prediction Error of Inverse Velocity (h) | ||
| 4 | 13 | 0.78 | – | −2.57 | −7.18 |
| 5 | – | 2.03 | -- | 1.39 | |
| 1 | −0.11 | – | −0.11 | – | |
| 8 | 13 | 4.33 | −4.21 | 1.16 | −7.35 |
| 5 | – | 0.59 | – | −2.01 | |
| 1 | −0.11 | – | −0.11 | – | |
| 12 | 13 | 2.49 | 3.37 | −0.74 | −6.92 |
| 5 | – | 1.09 | – | −1.95 | |
| 1 | 1.30 | – | 5.59 | – | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, L.; Tan, W.; Huang, P.; Xu, W.; Qi, Y.; Zhang, M. Landslide Prediction Method Based on a Ground-Based Micro-Deformation Monitoring Radar. Remote Sens. 2020, 12, 1230. https://doi.org/10.3390/rs12081230
Qi L, Tan W, Huang P, Xu W, Qi Y, Zhang M. Landslide Prediction Method Based on a Ground-Based Micro-Deformation Monitoring Radar. Remote Sensing. 2020; 12(8):1230. https://doi.org/10.3390/rs12081230
Chicago/Turabian StyleQi, Lin, Weixian Tan, Pingping Huang, Wei Xu, Yaolong Qi, and Mingzhi Zhang. 2020. "Landslide Prediction Method Based on a Ground-Based Micro-Deformation Monitoring Radar" Remote Sensing 12, no. 8: 1230. https://doi.org/10.3390/rs12081230
APA StyleQi, L., Tan, W., Huang, P., Xu, W., Qi, Y., & Zhang, M. (2020). Landslide Prediction Method Based on a Ground-Based Micro-Deformation Monitoring Radar. Remote Sensing, 12(8), 1230. https://doi.org/10.3390/rs12081230