Constructing a New Inter-Calibration Method for DMSP-OLS and NPP-VIIRS Nighttime Light



Abstract
1. Introduction
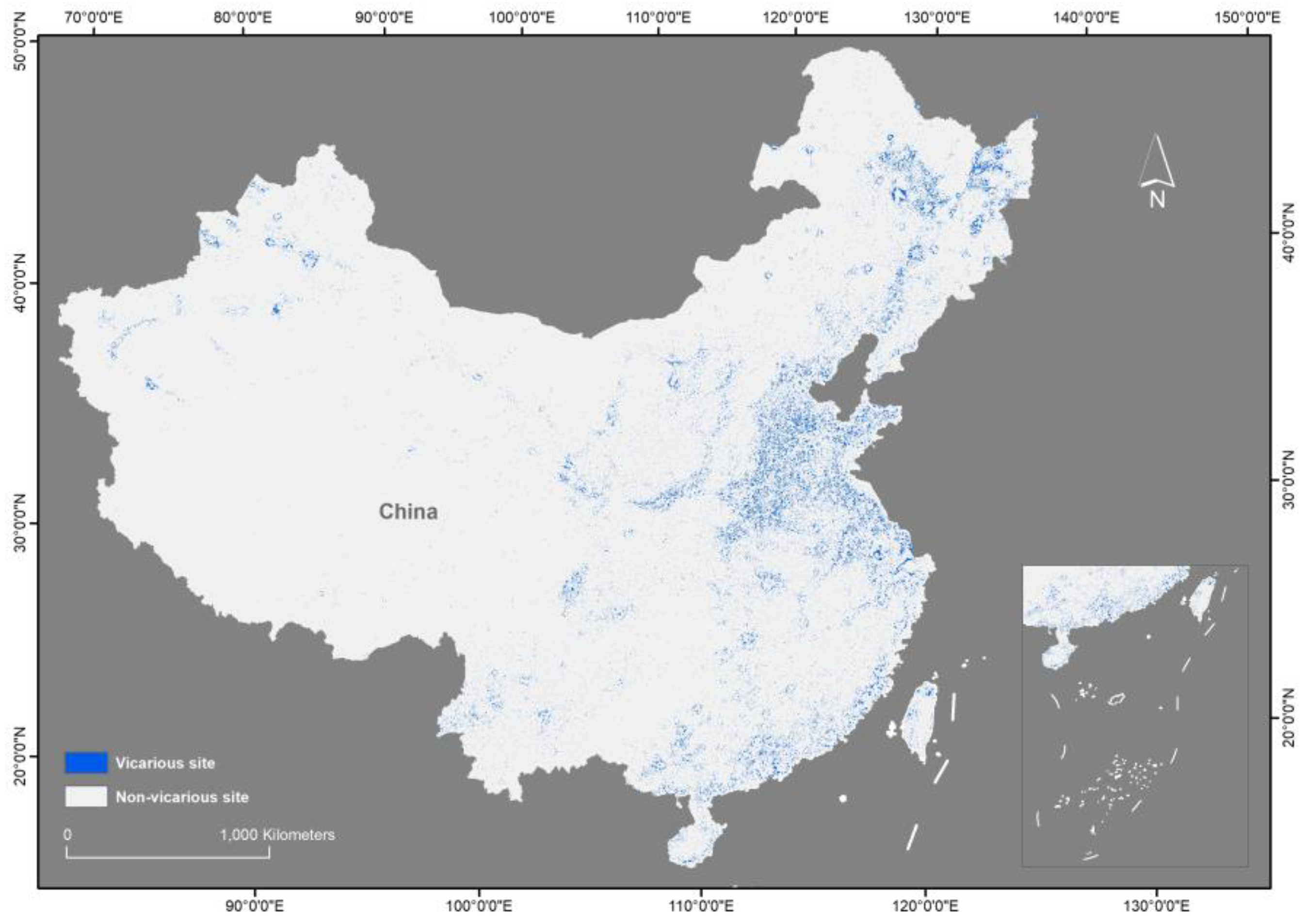
2. Study Areas and Datasets
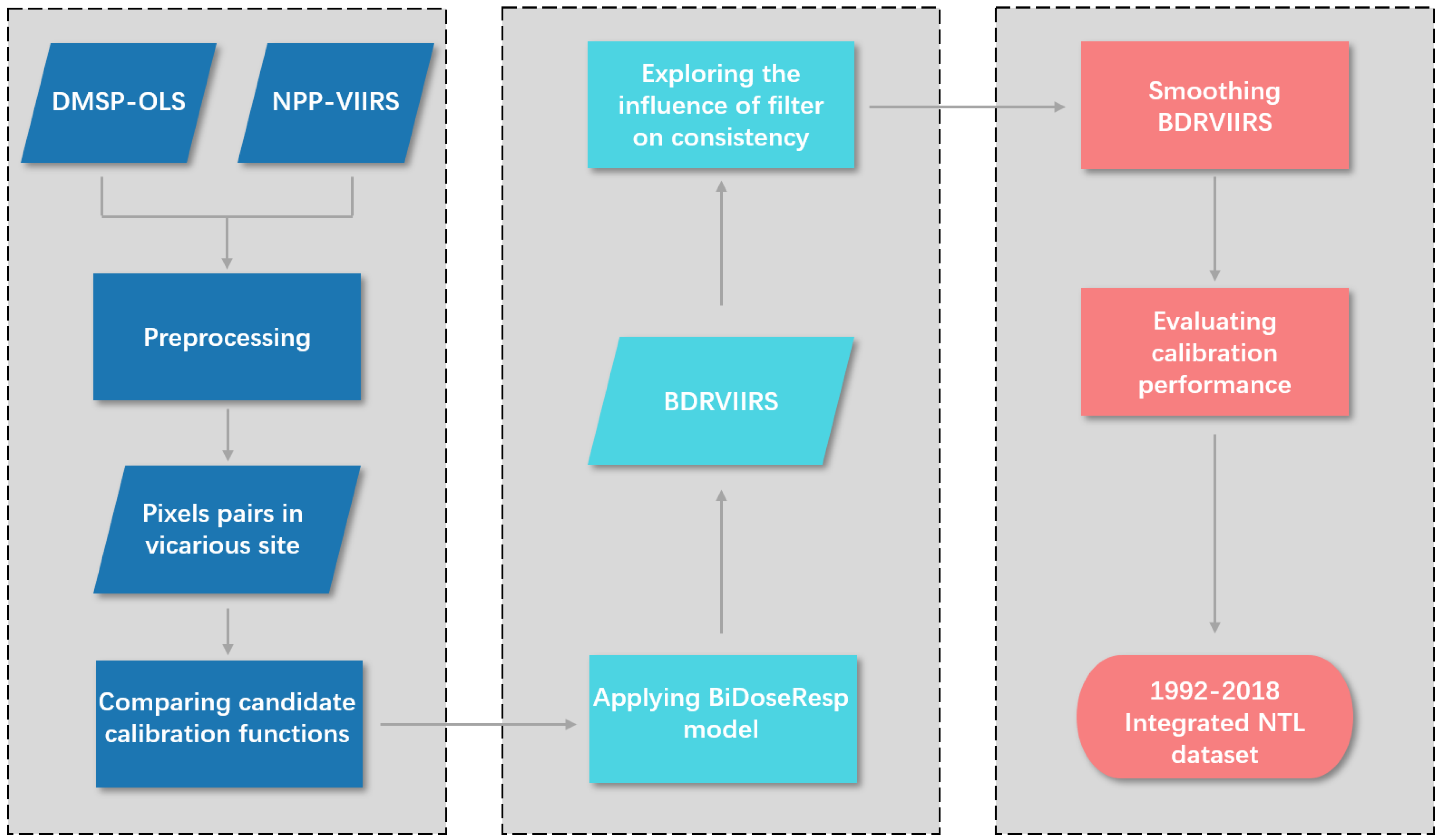
3. Methodology
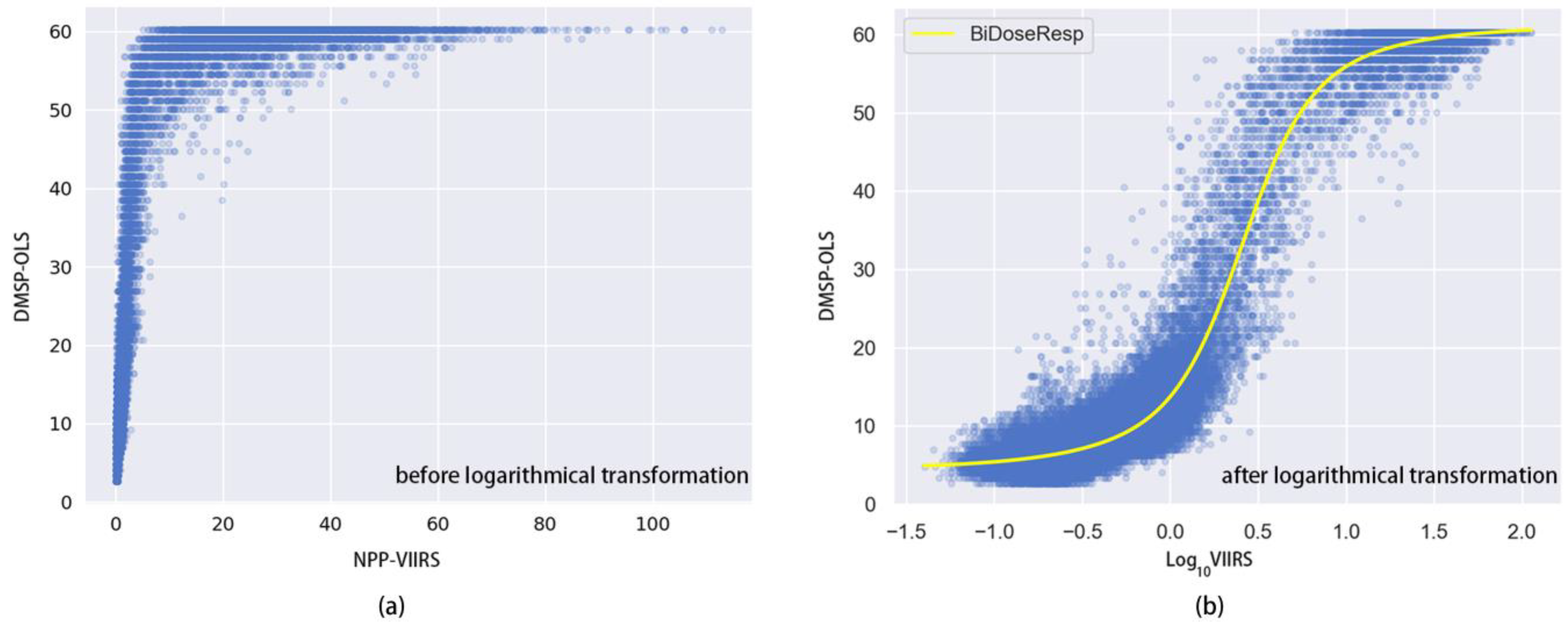
3.1. Preprocessing
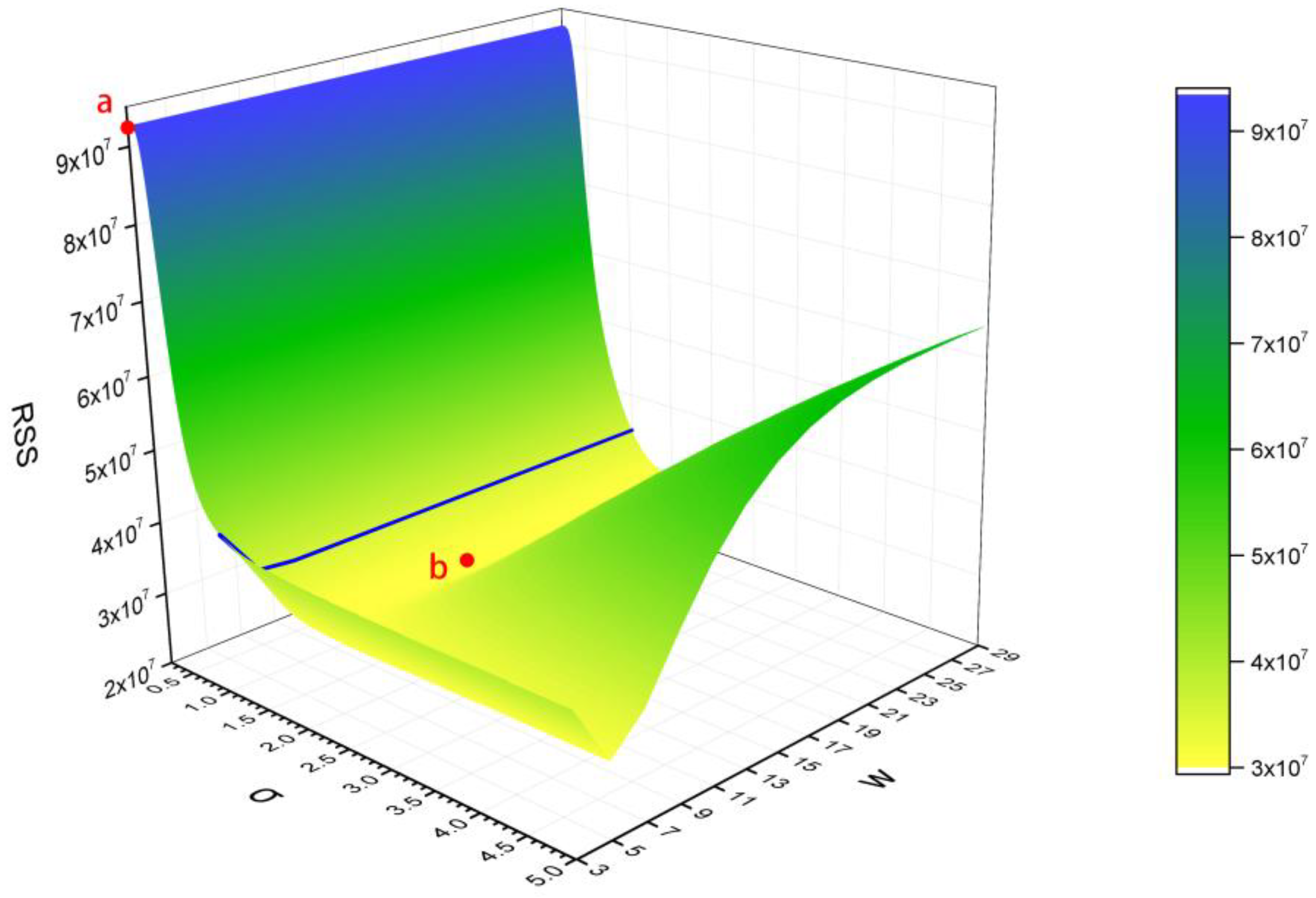
3.2. Constructing Inter-calibration Function
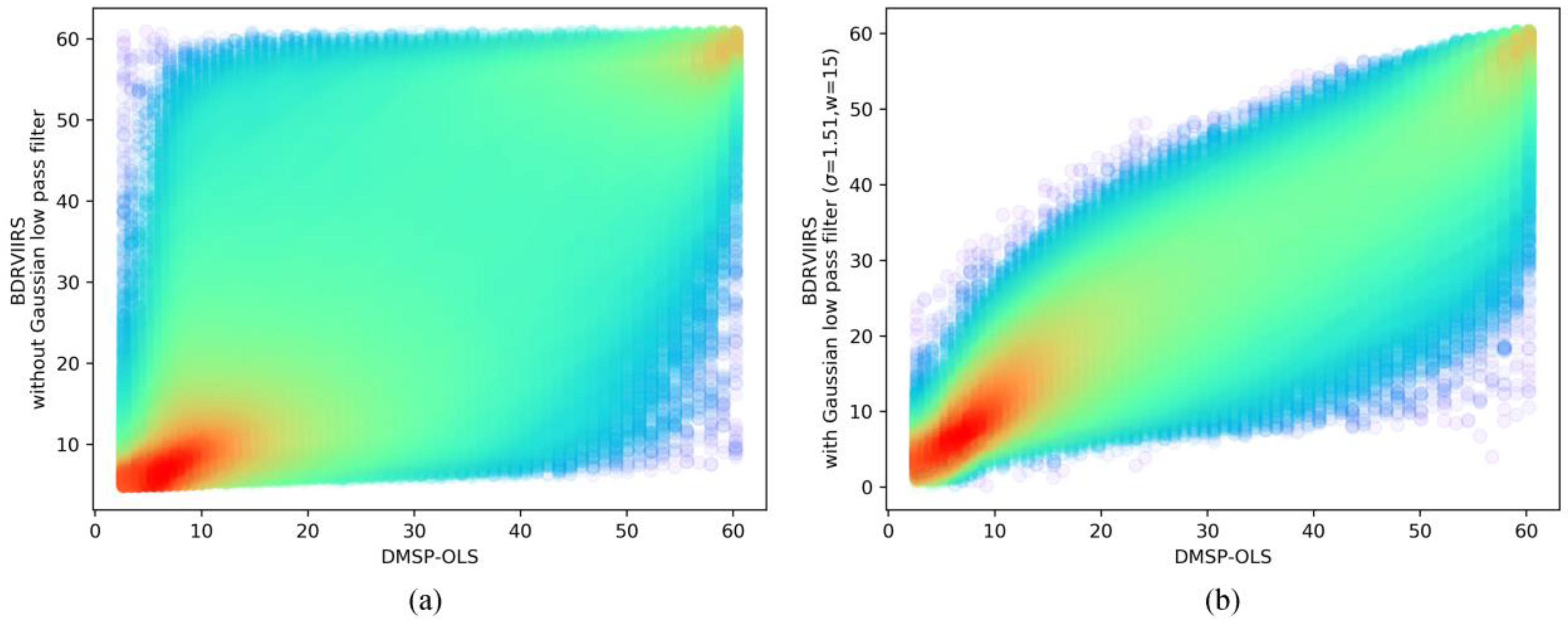
3.3. Mitigating Spatial Variability
4. Results
4.1. Constructing Inter-Calibration Function
4.2. Mitigating Spatial Variability
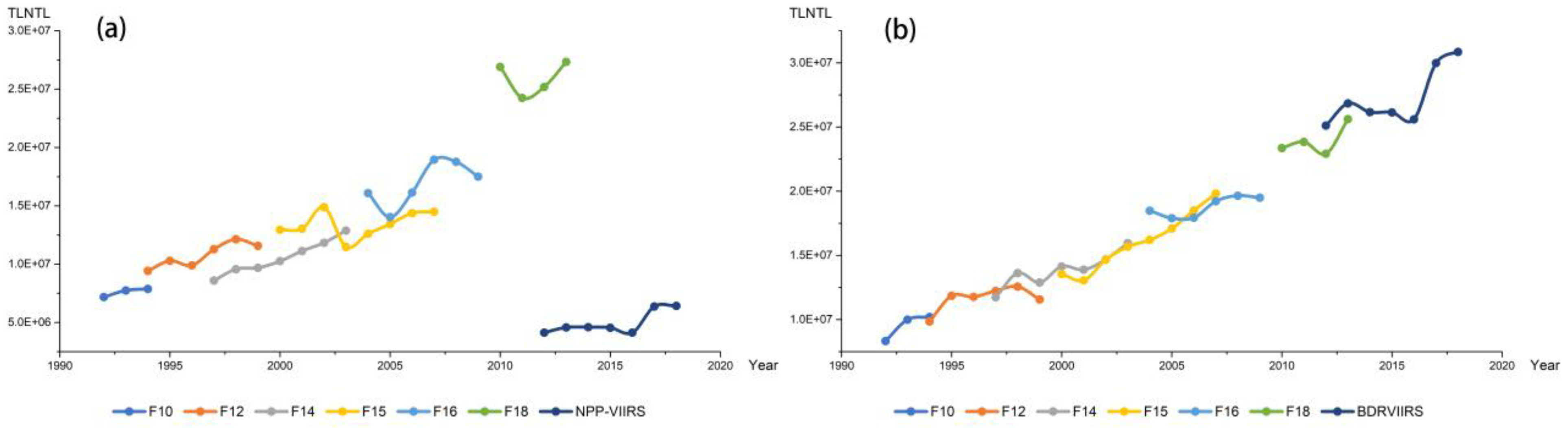
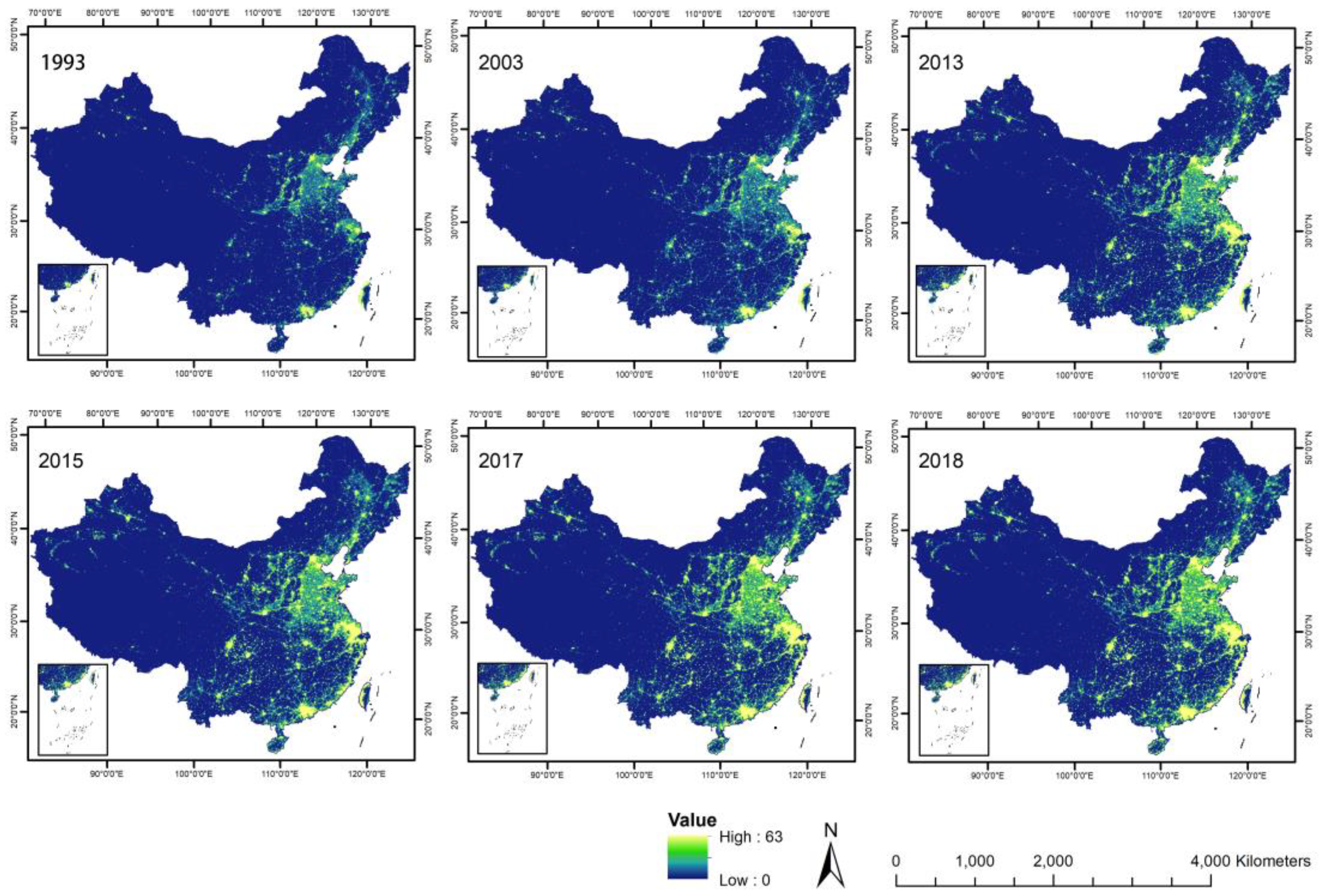
4.3. Trend of Calibrated NTL of China
5. Discussion
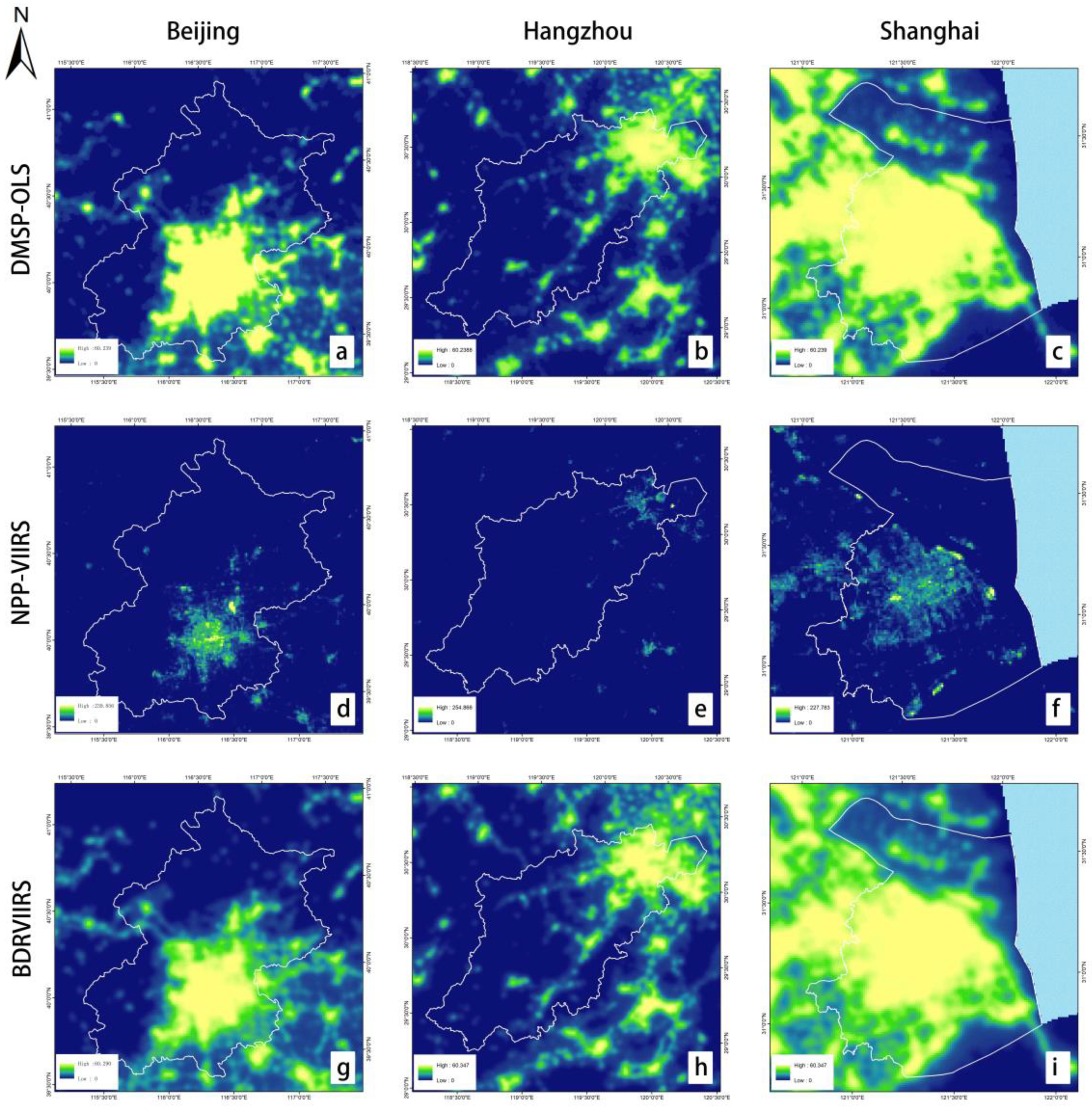
5.1. Evaluating Image Texture
5.2. Evaluating Transect
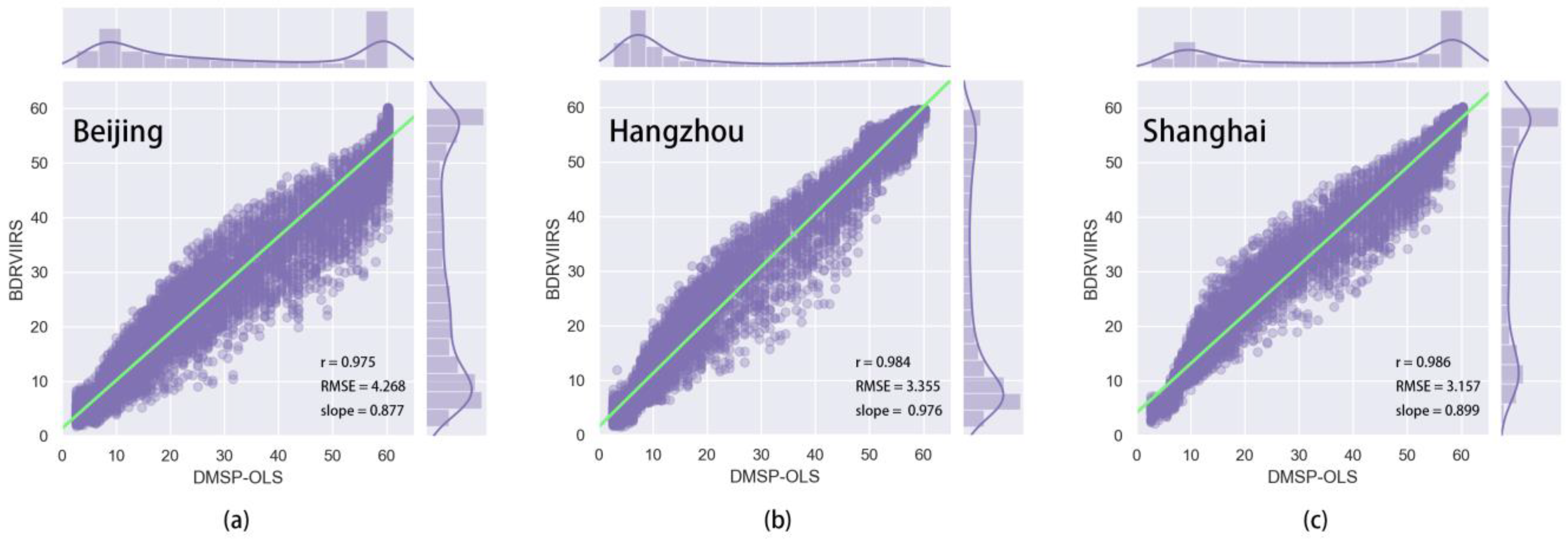
5.3. Evaluating Pixel Relationship
5.4. Comparison with Related Works
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, X.; Nordhaus, W.D. Using luminosity data as a proxy for economic statistics. Proc. Natl. Acad. Sci. USA 2011, 108, 8589. [Google Scholar] [CrossRef] [PubMed]
- Yu, B.; Deng, S.; Liu, G.; Yang, C.; Chen, Z.; Hill, C.J.; Wu, J. Nighttime Light Images Reveal Spatial-Temporal Dynamics of Global Anthropogenic Resources Accumulation above Ground. Environ. Sci. Technol. 2018, 52, 11520–11527. [Google Scholar] [CrossRef] [PubMed]
- Zhuo, L.; Ichinose, T.; Zheng, J.; Chen, J.; Shi, P.J.; Li, X. Modelling the population density of China at the pixel level based on DMSP/OLS non-radiance-calibrated night-time light images. Int. J. Remote Sens. 2009, 30, 1003–1018. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, B.; Song, W.; Liu, H.; Wu, Q.; Shi, K.; Wu, J. A New Approach for Detecting Urban Centers and Their Spatial Structure with Nighttime Light Remote Sensing. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6305–6319. [Google Scholar] [CrossRef]
- Chen, X.; Jia, X.; Pickering, M. A Nighttime Lights Adjusted Impervious Surface Index (NAISI) with Integration of Landsat Imagery and Nighttime Lights Data from International Space Station. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101889. [Google Scholar] [CrossRef]
- Ou, J.; Liu, X.; Liu, P.; Liu, X. Evaluation of Luojia 1-01 nighttime light imagery for impervious surface detection: A comparison with NPP-VIIRS nighttime light data. Int. J. Appl. Earth Obs. Geoinf. 2019, 81, 1–12. [Google Scholar] [CrossRef]
- Zheng, Q.; Jiang, R.; Wang, K.; Huang, L.; Ye, Z.; Gan, M.; Ji, B. Monitoring the trajectory of urban nighttime light hotspots using a Gaussian volume model. Int. J. Appl. Earth Obs. Geoinf. 2018, 65, 24–34. [Google Scholar] [CrossRef]
- Amaral, S.; Câmara, G.; Monteiro, A.M.V.; Quintanilha, J.A.; Elvidge, C.D. Estimating population and energy consumption in Brazilian Amazonia using DMSP night-time satellite data. Comput. Environ. Urban Syst. 2005, 29, 179–195. [Google Scholar] [CrossRef]
- Cao, X.; Wang, J.; Chen, J.; Shi, F. Spatialization of electricity consumption of China using saturation-corrected DMSP-OLS data. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 193–200. [Google Scholar] [CrossRef]
- Liu, X.; Ou, J.; Wang, S.; Li, X.; Yan, Y.; Jiao, L.; Liu, Y. Estimating spatiotemporal variations of city-level energy-related CO2 emissions: An improved disaggregating model based on vegetation adjusted nighttime light data. J. Clean. Prod. 2018, 177, 101–114. [Google Scholar] [CrossRef]
- Shi, K.; Yu, B.; Zhou, Y.; Chen, Y.; Yang, C.; Chen, Z.; Wu, J. Spatiotemporal variations of CO2 emissions and their impact factors in China: A comparative analysis between the provincial and prefectural levels. Appl. Energy 2019, 233–234, 170–181. [Google Scholar] [CrossRef]
- Katz, Y.; Levin, N. Quantifying urban light pollution—A comparison between field measurements and EROS-B imagery. Remote Sens. Environ. 2016, 177, 65–77. [Google Scholar] [CrossRef]
- Xiang, W.; Tan, M. Changes in Light Pollution and the Causing Factors in China’s Protected Areas, 1992–2012. Remote Sens. 2017, 9, 1026. [Google Scholar] [CrossRef]
- Xu, P.; Wang, Q.; Jin, J.; Jin, P. An increase in nighttime light detected for protected areas in mainland China based on VIIRS DNB data. Ecol. Indic. 2019, 107, 105615. [Google Scholar] [CrossRef]
- Abrahams, A.; Oram, C.; Lozano-Gracia, N. Deblurring DMSP nighttime lights: A new method using Gaussian filters and frequencies of illumination. Remote Sens. Environ. 2018, 210, 242–258. [Google Scholar] [CrossRef]
- Hao, R.; Yu, D.; Sun, Y.; Cao, Q.; Liu, Y.; Liu, Y. Integrating Multiple Source Data to Enhance Variation and Weaken the Blooming Effect of DMSP-OLS Light. Remote Sens. 2015, 7, 1422–1440. [Google Scholar] [CrossRef]
- Zhou, Y.; Smith, S.J.; Elvidge, C.D.; Zhao, K.; Thomson, A.; Imhoff, M. A cluster-based method to map urban area from DMSP/OLS nightlights. Remote Sens. Environ. 2014, 147, 173–185. [Google Scholar] [CrossRef]
- Bennett, M.M.; Smith, L.C. Advances in using multitemporal night-time lights satellite imagery to detect, estimate, and monitor socioeconomic dynamics. Remote Sens. Environ. 2017, 192, 176–197. [Google Scholar] [CrossRef]
- Li, X.; Elvidge, C.; Zhou, Y.; Cao, C.; Warner, T. Remote sensing of night-time light. Int. J. Remote Sens. 2017, 38, 5855–5859. [Google Scholar] [CrossRef]
- Zhao, M.; Zhou, Y.; Li, X.; Cao, W.; He, C.; Yu, B.; Li, X.; Elvidge, D.C.; Cheng, W.; Zhou, C. Applications of Satellite Remote Sensing of Nighttime Light Observations: Advances, Challenges, and Perspectives. Remote Sens. 2019, 11, 1971. [Google Scholar] [CrossRef]
- Shao, X.; Cao, C.; Zhang, B.; Qiu, S.; Elvidge, C.; Von Hendy, M. Radiometric calibration of DMSP-OLS sensor using VIIRS day/night band. SPIE 2014, 9264, 92640A. [Google Scholar]
- Jeswani, R. Evaluation of the consistency of DMSP-OLS and SNPP-VIIRS Night-time Light Datasets. J. Geomat. 2019, 13, 98–105. [Google Scholar]
- Imhoff, M.L.; Lawrence, W.T.; Stutzer, D.C.; Elvidge, C.D. A technique for using composite DMSP/OLS “City Lights” satellite data to map urban area. Remote Sens. Environ. 1997, 61, 361–370. [Google Scholar] [CrossRef]
- Small, C.; Pozzi, F.; Elvidge, C.D. Spatial analysis of global urban extent from DMSP-OLS night lights. Remote Sens. Environ. 2005, 96, 277–291. [Google Scholar] [CrossRef]
- Li, X.; Li, D.; Xu, H.; Wu, C. Intercalibration between DMSP/OLS and VIIRS night-time light images to evaluate city light dynamics of Syria’s major human settlement during Syrian Civil War. Int. J. Remote Sens. 2017, 38, 5934–5951. [Google Scholar] [CrossRef]
- Wu, K.; Wang, X. Aligning Pixel Values of DMSP and VIIRS Nighttime Light Images to Evaluate Urban Dynamics. Remote Sens. 2019, 11, 1463. [Google Scholar] [CrossRef]
- Zheng, Q.; Weng, Q.; Wang, K. Developing a new cross-sensor calibration model for DMSP-OLS and Suomi-NPP VIIRS night-light imageries. ISPRS J. Photogramm. Remote Sens. 2019, 153, 36–47. [Google Scholar] [CrossRef]
- Liu, L.; Leung, Y. A study of urban expansion of prefectural-level cities in South China using night-time light images. Int. J. Remote Sens. 2015, 36, 5557–5575. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, X.; Asrar, G.R.; Smith, S.J.; Imhoff, M. A global record of annual urban dynamics (1992–2013) from nighttime lights. Remote Sens. Environ. 2018, 219, 206–220. [Google Scholar] [CrossRef]
- Xiao, P.; Wang, X.; Feng, X.; Zhang, X.; Yang, Y. Detecting China’s Urban Expansion over the Past Three Decades Using Nighttime Light Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4095–4106. [Google Scholar] [CrossRef]
- Elvidge, D.C.; E Baugh, K.; Zhizhin, M.; Hsu, F.C. Why VIIRS data are superior to DMSP for mapping nighttime lights. Asia Pac. Adv. Netw. 2013, 35, 62–69. [Google Scholar] [CrossRef]
- Seaman, C. Beginner’s Guide to VIIRS Imagery Data. Available online: http://129.82.109.125/projects/npp/Beginner_Guide_to_VIIRS_Imagery_Data.pdf (accessed on 26 January 2020).
- Miller, D.S.; Straka, W.; Mills, P.S.; Elvidge, D.C.; Lee, F.T.; Solbrig, J.; Walther, A.; Heidinger, K.A.; Weiss, C.S. Illuminating the Capabilities of the Suomi National Polar-Orbiting Partnership (NPP) Visible Infrared Imaging Radiometer Suite (VIIRS) Day/Night Band. Remote Sens. 2013, 5, 6717–6766. [Google Scholar] [CrossRef]
- Li, X.; Xu, H.; Chen, X.; Li, C. Potential of NPP-VIIRS Nighttime Light Imagery for Modeling the Regional Economy of China. Remote Sens. 2013, 5, 3057–3081. [Google Scholar] [CrossRef]
- Elvidge, D.C.; Ziskin, D.; Baugh, E.K.; Tuttle, T.B.; Ghosh, T.; Pack, W.D.; Erwin, H.E.; Zhizhin, M. A Fifteen Year Record of Global Natural Gas Flaring Derived from Satellite Data. Energies 2009, 2, 595–622. [Google Scholar] [CrossRef]
- Cao, C.; Uprety, S.; Xiong, J.; Wu, A.; Jing, P.; Smith, D.; Chander, G.; Fox, N.; Ungar, S. Establishing the Antarctic Dome C community reference standard site towards consistent measurements from Earth observation satellites. Can. J. Remote Sens. 2010, 36, 498–513. [Google Scholar] [CrossRef]
- Datla, R.; Shao, X.; Cao, C.; Wu, X. Comparison of the Calibration Algorithms and SI Traceability of MODIS, VIIRS, GOES, and GOES-R ABI Sensors. Remote Sens. 2016, 8, 126. [Google Scholar] [CrossRef]
- Wu, X.; Weinreb, M.; Chang, I.; Crosby, D.; Dean, C.; Sun, F.; Han, D. Calibration of GOES Imager Visible Channels. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium. IGARSS, Seoul, Korea, 25–29 July 2005; pp. 3432–3435. [Google Scholar]
- Small, C.; Elvidge, C.D.; Baugh, K. Mapping Urban Structsure and Spatial Connectivity with VIIRS and OLS Night Light Imagery. In Proceedings of the Joint Urban Remote Sensing Event, Sao Paulo, Brazil, 21–23 April 2013; pp. 230–233. [Google Scholar]
- Motulsky, H.; Christopoulos, A. Fitting Models to Biological Data Using Linear and Nonlinear Regression: A Practical Guide to Curve Fitting; Oxford University Press: New York, NY, USA, 2004. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors of NTL | DMSP-OLS | NPP-VIIRS DNB |
|---|---|---|
| Data Spatial Resolution | 30 arc second | 15 arc second |
| Data Temporary Resolution | Annual | Monthly |
| Available Time Interval | 1992–2013 | April 2012–Present |
| Overpass time | Between 19:30 and 21:30 | 1:30 |
| Quantization ability in A/D | 6bit | 14 bits for HGS; 13 bits for MGS and LGS |
| Unit | Unitless DN | |
| On-board Calibration | Unequipped | Equipped |
| Model | RSS | |
|---|---|---|
| BiDoseResp | 0.967 | |
| Logistic | 0.967 | |
| Linear | 0.847 | |
| Power | - | - |
| 4.56804 | 61.02992 | 0.37684 | 0.40853 | 0.93649 | 2.3558 | 0.30823 |
| Related Works | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Shao et al. (2014) | Li et al. (2017) | JESWANI (2017) | Wu et al. (2019) | Zheng et al. (2019) | This Work | ||||||||
| Data characteristics | Daily, not free | Monthly, not free | Annual, free | Annual, free | annual, free | annual, free | |||||||
| Calibration function | Function name | Linear function | Power function & Convolution | Logarithm & linear function | Power function & Convolution | GWRc | BiDoseResp & Convolution | ||||||
| - | - | 0.775 | - | - | - | - | - | 0.967 | |||||
| RMSE | 4.05 | - | - | - | - | 6.36 | - | - | 1.75 | ||||
| Research area | Name | Dome C | Syrian | India | Beijing | Yiwu | Hangzhou | Beijing | Shanghai | China | |||
| Level | Point | Country | Country | City | City | City | City | City | Country | ||||
| Dynamic range | 10–31 | 0–50 | 0–63 | 0–50 | no upper limit | 0–63 | |||||||
| Evaluation index of result | r | - | 0.9158 | - | 0.945 | 0.963 | 0.993 | 0.995 | 0.966 | Beijing | Yiwu | Hangzhou | Shanghai |
| 0.975 | 0.98 | 0.983 | 0.986 | ||||||||||
| RMSE | - | 4.9967 | - | 9.387 | 7.687 | - | - | - | Beijing | Yiwu | Hangzhou | Shanghai | |
| 4.268 | 3.649 | 3.356 | 3.157 | ||||||||||
| Simplicity of algorithm | Simple | Simple | Simple | Simple | Complex | Simple | |||||||
| Product | Limited application range | The calibrated monthly NTL of Syrian from March 2011 to January 2017 | The calibrated NTL of India in 2013 | The calibrated annual NTL of Beijing and Yiwu from 1992 to 2018 | The calibrated annual NTL of Hangzhou, Beijing and Shanghai from 1996 to 2017 | The calibrated annual NTL of China from 1992 to 2018 | |||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Guo, J.; Ahmad, S.; Li, Z.; Hong, J. Constructing a New Inter-Calibration Method for DMSP-OLS and NPP-VIIRS Nighttime Light. Remote Sens. 2020, 12, 937. https://doi.org/10.3390/rs12060937
Ma J, Guo J, Ahmad S, Li Z, Hong J. Constructing a New Inter-Calibration Method for DMSP-OLS and NPP-VIIRS Nighttime Light. Remote Sensing. 2020; 12(6):937. https://doi.org/10.3390/rs12060937
Chicago/Turabian StyleMa, Jinji, Jinyu Guo, Safura Ahmad, Zhengqiang Li, and Jin Hong. 2020. "Constructing a New Inter-Calibration Method for DMSP-OLS and NPP-VIIRS Nighttime Light" Remote Sensing 12, no. 6: 937. https://doi.org/10.3390/rs12060937
APA StyleMa, J., Guo, J., Ahmad, S., Li, Z., & Hong, J. (2020). Constructing a New Inter-Calibration Method for DMSP-OLS and NPP-VIIRS Nighttime Light. Remote Sensing, 12(6), 937. https://doi.org/10.3390/rs12060937