Airborne Tree Crown Detection for Predicting Spatial Heterogeneity of Canopy Transpiration in a Tropical Rainforest

 ,
,
Abstract
1. Introduction
2. Materials and Methods
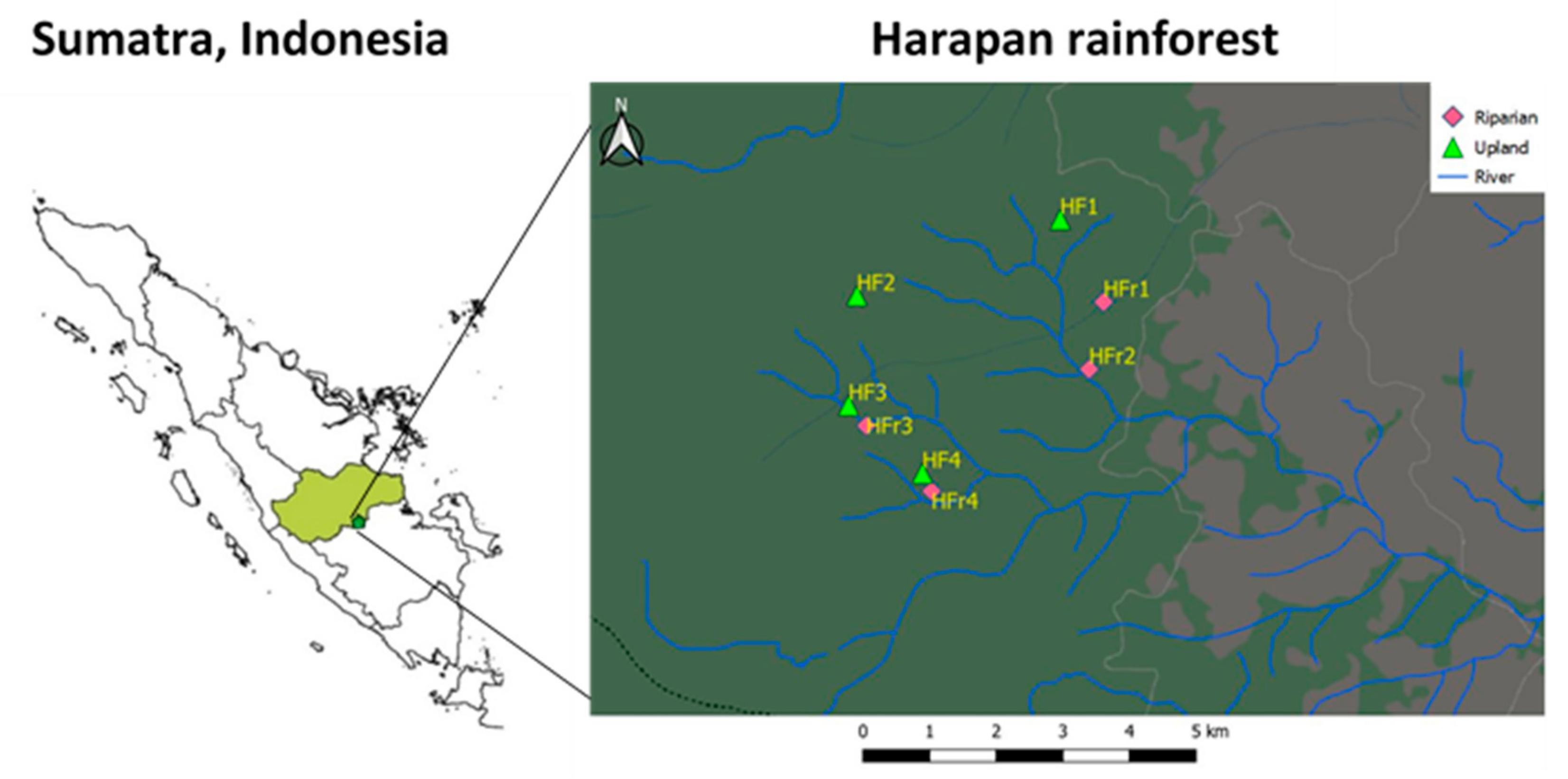
2.1. Study Region and Sites
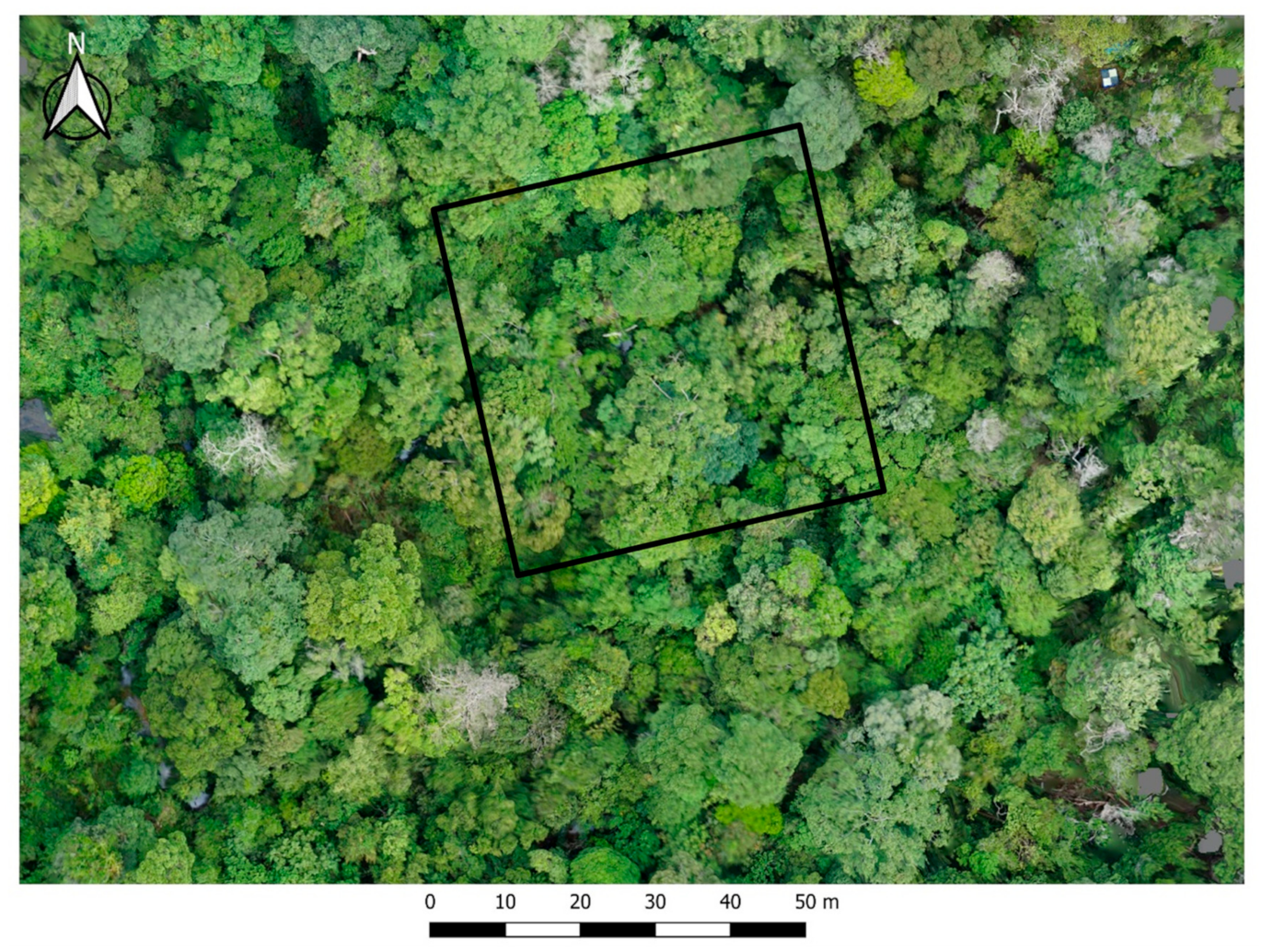
2.2. Study Plots and Stand Characteristics
2.3. Sap Flux Measurements
2.4. Remote Sensing
2.4.1. Drone Image Acquisition
2.4.2. 3D Point Cloud Generation, Individual Tree Crown Detection and Crown Metrics
2.4.3. Automatic Crown Detection Using AMS3D
2.5. Drone-Based Scaling, Uncertainties And Heterogeneity Assessment of Transpiration
3. Results
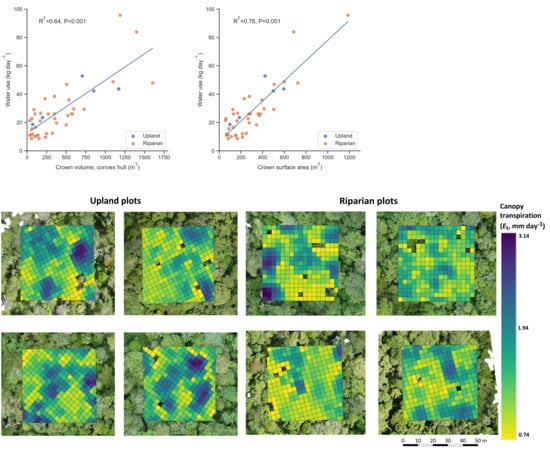
3.1. Tree Water Use vs. Crown Metrics
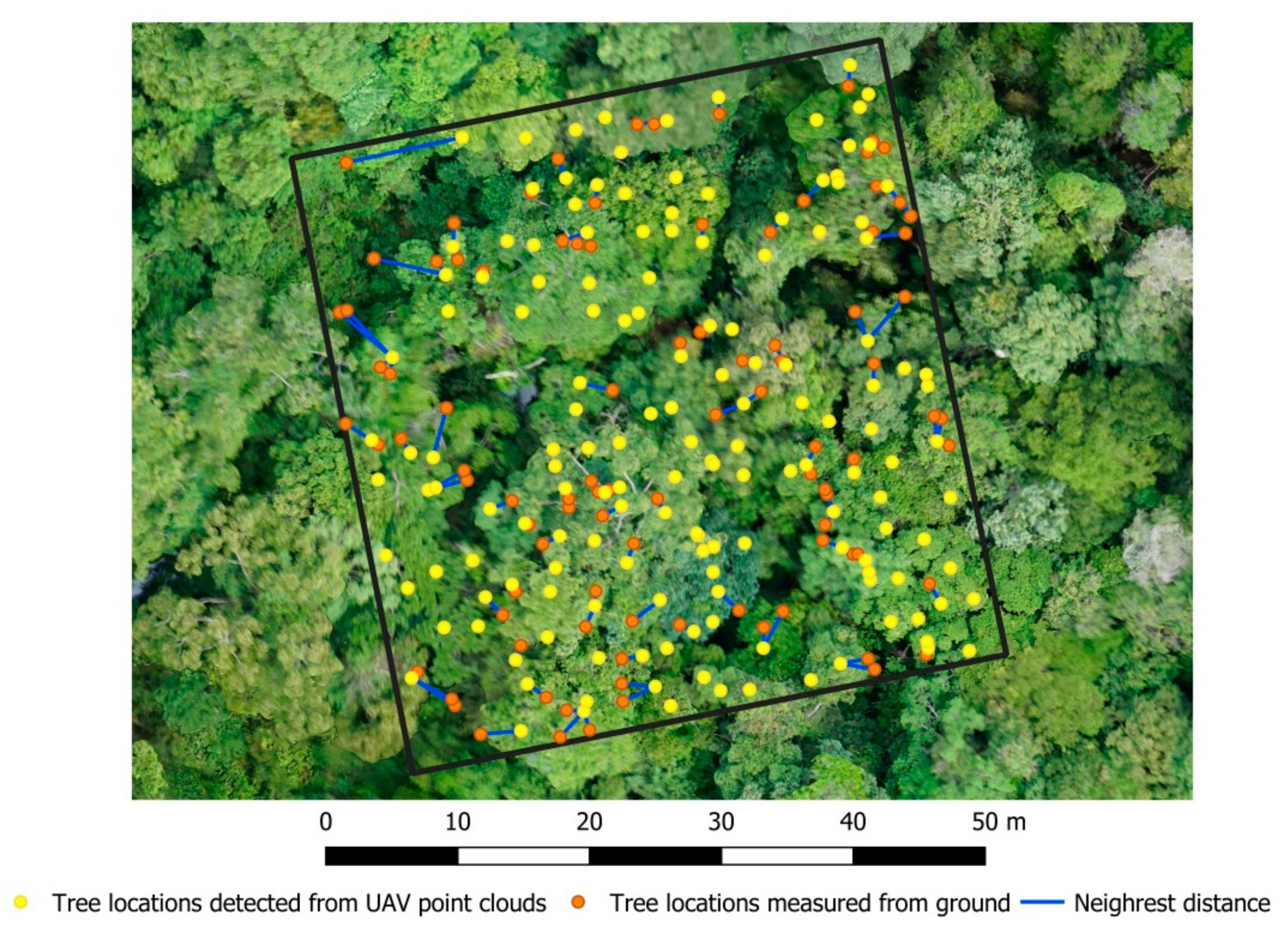
3.2. Individual Tree Crown Segmentation
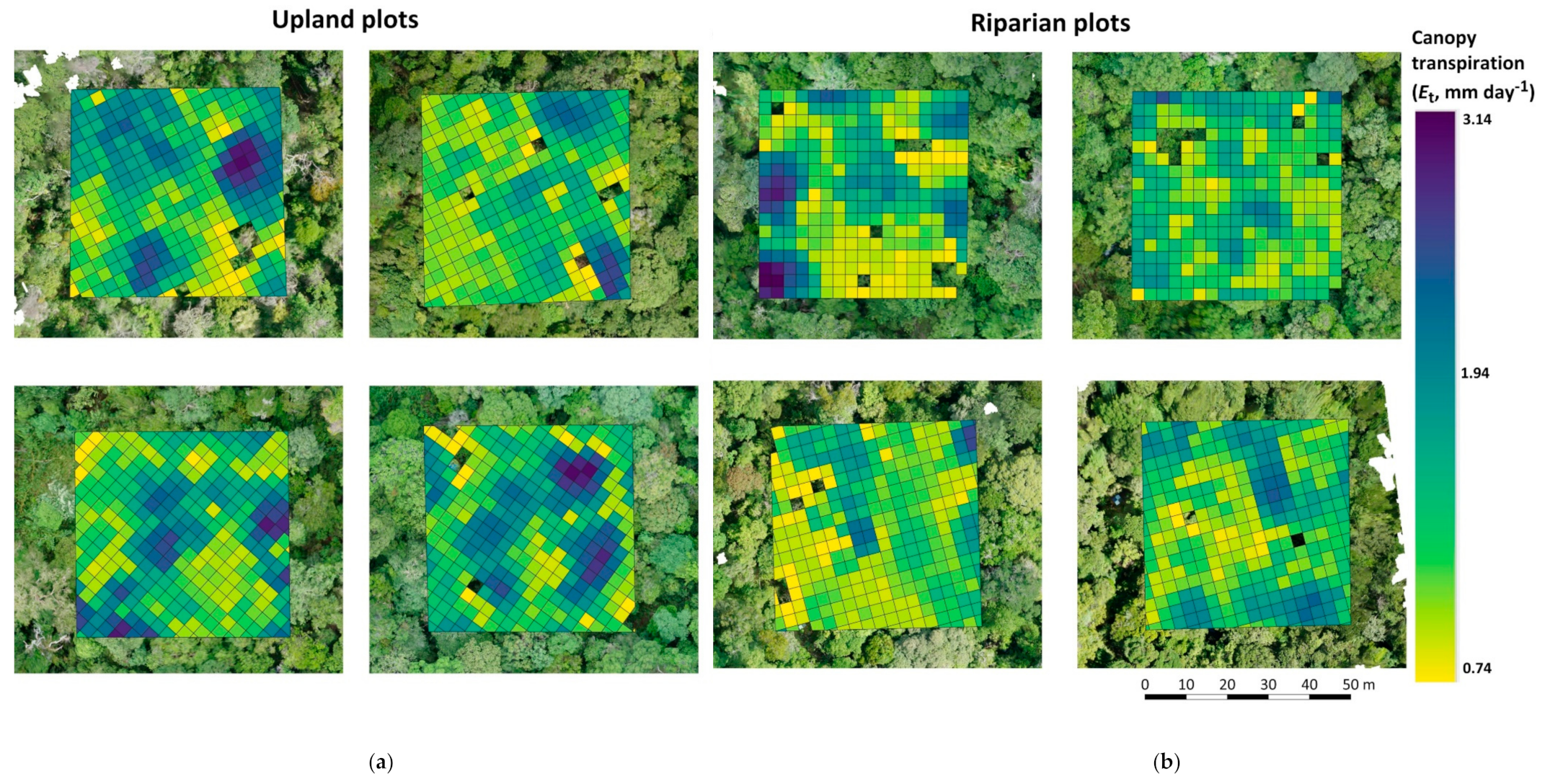
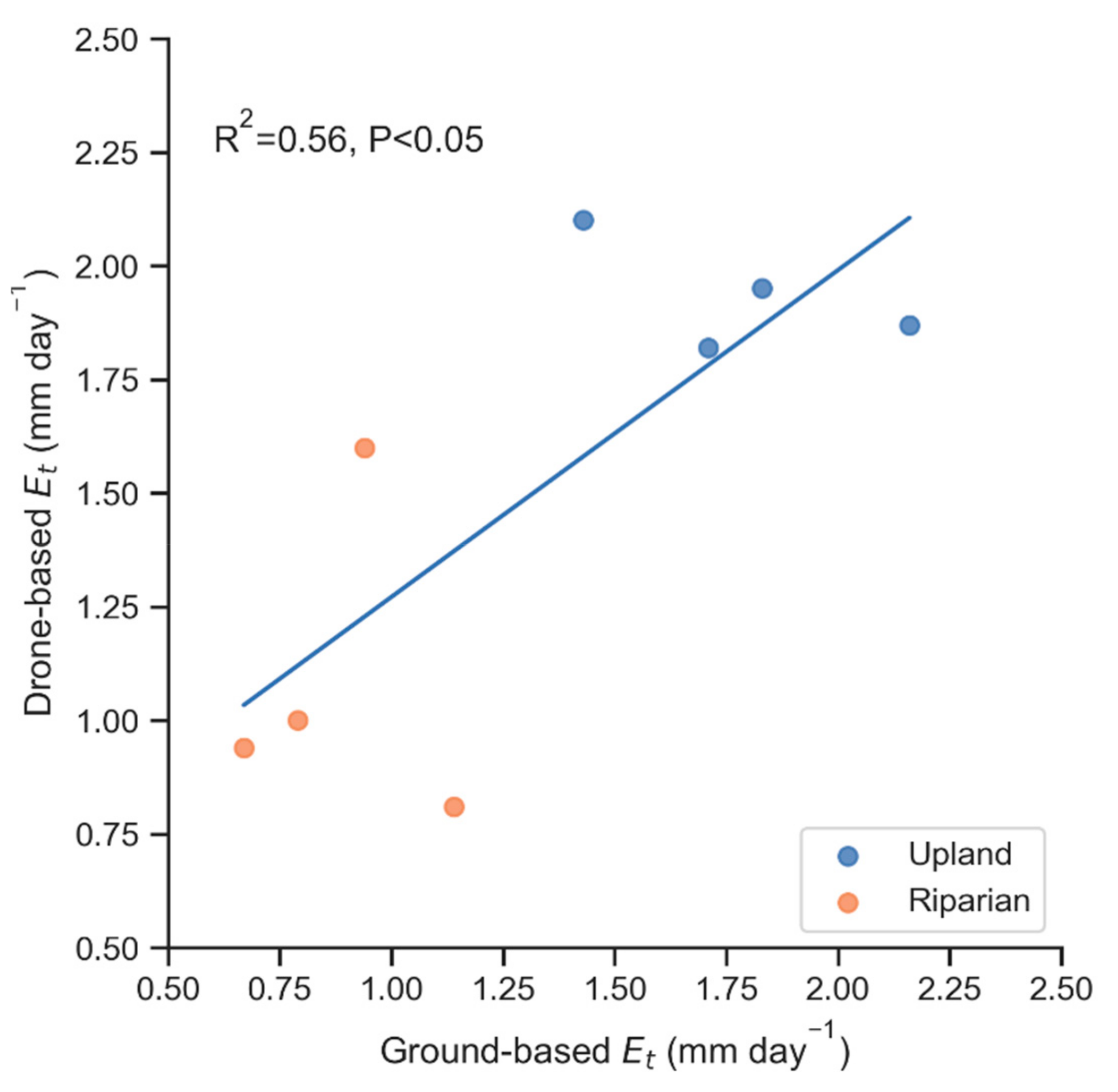
3.3. Canopy Transpiration: Scaling, Uncertainties and Spatial Heterogeneity
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specification |
|---|---|
| Camera | Sony A5000 |
| Drone | MikroKopter OktoXL V3 |
| Flight altitude | 80 m |
| Number of images | 220 per 50x50 m2 plot |
| Focal length | 16 mm |
| Ground resolution | 1.8 cm/pixel |
| Point density | 198 points m−2 |
| Equation Y = Tree Water Use X = Variables | R2 | P Value | |
|---|---|---|---|
| Drone-based | |||
| Crown surface area (m2) | Y = 0.07 * X + 6.65 | 0.76 | P < 0.001 |
| Crown volume (m3) | Y = 0.04 * X + 12.44 | 0.64 | P < 0.001 |
| Crown projection area (m2) | Y = 0.25 * X + 7.33 | 0.69 | P < 0.001 |
| Ground-based | |||
| DBH (cm) | Y = 0.94 * X - 1.17 | 0.38 | P < 0.001 |
| Sapwood area (cm2) | Y = 0.08 * X + 0.25 | 0.37 | P < 0.001 |
| Transpiration (mm Day−1) Estimate ± Uncertainty | ||||
|---|---|---|---|---|
| Plot type | Plot ID | Drone-based | Ground-based | Divergence % |
| Upland plots | HF1 | 1.87 ± 0.36 | 2.16 ± 1.23 | 13 |
| HF2 | 1.82 ± 0.35 | 1.71 ± 0.98 | 6 | |
| HF3 | 1.95 ± 0.37 | 1.83 ± 1.04 | 7 | |
| HF4 | 2.10 ± 0.40 | 1.43 ± 0.82 | 46 | |
| Riparian plots | HFr1 | 0.94 ± 0.18 | 0.67 ± 0.38 | 39 |
| HFr2 | 0.81 ± 0.15 | 1.14 ± 0.65 | 29 | |
| HFr3 | 1.00 ± 0.19 | 0.79 ± 0.45 | 27 | |
| HFr4 | 1.60 ± 0.30 | 0.94 ± 0.54 | 70 | |
| Mean 13 | ||||




References
- Whitmore, T.C. An Introduction to Tropical Rain Forests, 2nd ed.; Oxford University Press: Oxford, NY, USA, 1998; ISBN 978-0-19-850147-3. [Google Scholar]
- Whitten, T.; Damanik, S.J. The Ecology of Sumatra; Periplus Editions (HK) Limited: Hong Kong, China, 2000; ISBN 978-962-593-074-9. [Google Scholar]
- Ellison, D.; Morris, C.E.; Locatelli, B.; Sheil, D.; Cohen, J.; Murdiyarso, D.; Gutierrez, V.; Noordwijk, M.; van Creed, I.F.; Pokorny, J.; et al. Trees, forests and water: Cool insights for a hot world. Glob. Environ. Chang. 2017, 43, 51–61. [Google Scholar] [CrossRef]
- Wullschleger, S.D.; Meinzer, F.C.; Vertessy, R.A. A review of whole-plant water use studies in tree. Tree Physiol. 1998, 18, 499–512. [Google Scholar] [CrossRef]
- Ahongshangbam, J.; Khokthong, W.; Ellsäßer, F.; Hendrayanto, H.; Hölscher, D.; Röll, A. Drone-based photogrammetry-derived crown metrics for predicting tree and oil palm water use. Ecohydrology 2019, 12. [Google Scholar] [CrossRef]
- Loranty, M.M.; Mackay, D.S.; Ewers, B.E.; Adelman, J.D.; Kruger, E.L. Environmental drivers of spatial variation in whole-tree transpiration in an aspen-dominated upland-to-wetland forest gradient. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Mackay, D.S.; Ewers, B.E.; Loranty, M.M.; Kruger, E.L. On the representativeness of plot size and location for scaling transpiration from trees to a stand. J. Geophys. Res. Biogeosci. 2010, 115. [Google Scholar] [CrossRef]
- Angstmann, J.L.; Ewers, B.E.; Barber, J.; Kwon, H. Testing transpiration controls by quantifying spatial variability along a boreal black spruce forest drainage gradient. Ecohydrology 2013, 6, 783–793. [Google Scholar] [CrossRef]
- McJannet, D.; Wallace, J.; Fitch, P.; Disher, M.; Reddell, P. Water balance of tropical rainforest canopies in north Queensland, Australia. Hydrol. Process. 2007, 21, 3473–3484. [Google Scholar] [CrossRef]
- Santiago, L.S.; Goldstein, G.; Meinzer, F.C.; Fownes, J.H.; Mueller-Dombois, D. Transpiration and forest structure in relation to soil waterlogging in a Hawaiian montane cloud forest. Tree Physiol. 2000, 20, 673–681. [Google Scholar] [CrossRef][Green Version]
- Hardanto, A.; Röll, A.; Niu, F.; Meijide, A.; Hendrayanto Hölscher, D. Oil palm and rubber tree water use patterns: Effects of topography and flooding. Front. Plant Sci. 2017, 8. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Jaakkola, A. Mini-UAV-borne LiDAR for fine-scale mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Asner, G.P.; Palace, M.; Keller, M.; Pereira, R., Jr.; Silva, J.N.; Zweede, J.C. Estimating canopy structure in an amazon forest from laser range finder and IKONOS satellite observations. Biotropica 2002, 34, 483–492. [Google Scholar] [CrossRef]
- Mlambo, R.; Woodhouse, I.H.; Gerard, F.; Anderson, K. Structure from Motion (SfM) photogrammetry with drone data: A low cost method for monitoring greenhouse gas emissions from forests in developing countries. Forests 2017, 8, 68. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision and hobbyist unmanned aerial vehicles. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultra-fine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar] [CrossRef]
- Ota, T.; Ogawa, M.; Mizoue, N.; Fukumoto, K.; Yoshida, S. Forest structure estimation from a UAV-based photogrammetric point cloud in managed temperate coniferous forests. Forests 2017, 8, 343. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovskỳ, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and Structure from Motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating individual trees in a savanna woodland using small footprint lidar data. Photogramm. Eng. Remote Sens. 2006, 8, 923–932. [Google Scholar] [CrossRef]
- Dalponte, M.; Coomes, D.A. Tree-centric mapping of forest carbon density from airborne laser scanning and hyperspectral data. Methods Ecol. Evol. 2016, 7, 1236–1245. [Google Scholar] [CrossRef] [PubMed]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.J.; et al. Imputation of individual longleaf pine (Pinus palustris Mill.) tree attributes from field and LiDAR data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Meyer, V. Lidar detection of individual tree size in tropical forests. Remote Sens. Environ. 2016, 183, 318–333. [Google Scholar] [CrossRef]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of individual tree crowns in airborne lidar data. Photogramm. Eng. Remote Sens. 2006, 357–363. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the lidar point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Xiao, W.; Zaforemska, A.; Smigaj, M.; Wang, Y.; Gaulton, R. Mean shift segmentation assessment for individual forest tree delineation from airborne lidar data. Remote Sens. 2019, 11, 1263. [Google Scholar] [CrossRef]
- Morsdorf, F.; Meier, E.; Kötz, B.; Itten, K.I.; Dobbertin, M.; Allgöwer, B. LiDAR-based geometric reconstruction of boreal type forest stands at single tree level for forest and wildland fire management. Remote Sens. Environ. 2004, 92, 353–362. [Google Scholar] [CrossRef]
- Vega, C.; Hamrouni, A.; El Mokhtari, S.; Morel, J.; Bock, J.; Renaud, J.-P.; Bouvier, M.; Durrieu, S. PTrees: A point-based approach to forest tree extraction from lidar data. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 98–108. [Google Scholar] [CrossRef]
- Aubry-Kientz, M.; Dutrieux, R.; Ferraz, A.; Saatchi, S.; Hamraz, H.; Williams, J.; Coomes, D.; Piboule, A.; Vincent, G. A comparative assessment of the performance of individual tree crowns delineation algorithms from ALS data in tropical forests. Remote Sens. 2019, 11, 1086. [Google Scholar] [CrossRef]
- Amiri, N.; Yao, W.; Heurich, M.; Krzystek, P.; Skidmore, A.K. Estimation of regeneration coverage in a temperate forest by 3D segmentation using airborne laser scanning data. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 252–262. [Google Scholar] [CrossRef]
- Drescher, J.; Rembold, K.; Allen, K.; Beckschäfer, P.; Buchori, D.; Clough, Y.; Faust, H.; Fauzi, A.M.; Gunawan, D.; Hertel, D.; et al. Ecological and socio-economic functions across tropical land use systems after rainforest conversion. Philos. Trans. R. Soc. B 2016, 371, 20150275. [Google Scholar] [CrossRef] [PubMed]
- Laumonier, Y. The Vegetation and Physiography of Sumatra: Maps; Springer: Berlin/Heidelberg, Germany, 1997; ISBN 978-0-7923-3761-4. [Google Scholar]
- Rembold, K.; Mangopo, H.; Tjitrosoedirdjo, S.S.; Kreft, H. Plant diversity, forest dependency, and alien plant invasions in tropical agricultural landscapes. Biol. Conserv. 2017, 213, 234–242. [Google Scholar] [CrossRef]
- Guillaume, T.; Damris, M.; Kuzyakov, Y. Losses of soil carbon by converting tropical forest to plantations: Erosion and decomposition estimated by δ13C. Glob. Chang. Biol. 2015, 21, 3548–3560. [Google Scholar] [CrossRef] [PubMed]
- Koks, J.A. Tropical Forest Conversion to Rubber and Oil Palm Plantations: Landscape-scale and Inter-annual Variability of Soil Greenhouse Gas (GHG) Fluxes and the Contribution of Tree-stem Emissions to the Soil GHG Budget in Jambi Province, Sumatra, Indonesia. Ph.D. Thesis, University of Goettingen, Göttingen, Germany, 2019. Unpublished. [Google Scholar]
- Granier, A. Une nouvelle méthode pour la mesure du flux de sève brute dans le tronc des arbres. In Annales des Sciences Forestières; EDP Sciences: Les Ulis, France, 1985; Volume 42, pp. 193–200. [Google Scholar] [CrossRef]
- Röll, A.; Niu, F.; Meijide, A.; Ahongshangbam, J.; Ehbrecht, M.; Guillaume, T.; Kreft, H. Transpiration on the rebound in lowland Sumatra. Agric. For. Meteorol. 2019, 274, 160–171. [Google Scholar] [CrossRef]
- Oishi, A.C.; Oren, R.; Stoy, P.C. Estimating components of forest evapotranspiration: A footprint approach for scaling sap flux measurements. Agric. For. Meteorol. 2008, 148, 1719–1732. [Google Scholar] [CrossRef]
- AgiSoft PhotoScan Professional (Version 1.5.1) (Software). 2019. Available online: http://www.agisoft.com/downloads/installer/ (accessed on 25 December 2019).
- QGIS Development Team. QGIS Geographic Information System; Open Source Geospatial Foundation Project. 2019. Available online: http://qgis.osgeo.org/ (accessed on 25 December 2019).
- CloudCompare. CloudCompare (version 2.9) [GPL software]. 2019. Available online: http://www.cloudcompare.org/ (accessed on 25 December 2019).
- Roussel, J.R.; Auty, D. lidR: Airborne LiDAR Data Manipulation and Visualization for Forestry Applications; R Package Version 1.6.1. 2018. Available online: https://rdrr.io/cran/lidR/ (accessed on 10 October 2019).
- Silva, C.A.; Crookston, N.L.; Hudak, A.T.; Vierling, L.A. rLiDAR: An R Package for Reading, Processing and Visualizing LiDAR (Light Detection and Ranging) Data, R Package Version 0.1. 2015. Available online: http://cran.rproject.org/web/packages/rLiDAR/index.html (accessed on 20 September 2017).
- Knapp, N. MeanShiftR: Tree Delineation from Lidar Using Mean Shift Clustering. R Package. 2019. Available online: https://rdrr.io/github/niknap/MeanShiftR/ (accessed on 10 October 2019).
- Goutte, C.; Gaussier, E. A Probabilistic Interpretation of Precision, Recall and F-Score, with Implication for Evaluation. In Advances in Information Retrieval; Losada, D.E., Fernández-Luna, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar]
- Angelo Canty and B. D. Ripley Boot: Bootstrap R (S-Plus) Functions. R Package Version 13-24. 2019. Available online: https://cran.r-project.org/web/packages/boot/index.html (accessed on 10 October 2019).
- Davison, A.C.; Hinkley, D.V. Bootstrap Methods and Their Application; Cambridge University Press: Cambridge, UK, 1997; ISBN 0-521-57391-2. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019. [Google Scholar]
- Michael, W.; Olga, B.; Paul, H.; John, B.C.; Yaroslav, H.; Stephan, H.; Alistair, M.; Tom, A.; Tal, Y.; Tobias, M.; et al. Seaborn: Statistical Data Visualization. Python Library Version 0.9.0. 2018. Available online: https://zenodo.org/record/1313201#.Xhcqt1VKiUk (accessed on 10 October 2019).
- Granier, A.; Biron, P.; Bréda, N.; Pontailler, J.-Y.; Saugier, B. Transpiration of trees and forest stands: Short and long-term monitoring using sapflow methods. Glob. Chang. Biol. 1996, 2, 265–274. [Google Scholar] [CrossRef]
- Kunert, N.; Aparecido, L.M.T.; Wolff, S.; Higuchi, N.; Santos, J.; dos Araujo, A.C.; de Trumbore, S. A revised hydrological model for the Central Amazon: The importance of emergent canopy trees in the forest water budget. Agric. For. Meteorol. 2017, 239, 47–57. [Google Scholar] [CrossRef]
- Lindberg, E.; Holmgren, J. Individual tree crown methods for 3D data from remote sensing. Curr. For. Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef]
- Næsset, E.; Nelson, R. Using airborne laser scanning to monitor tree migration in the boreal–alpine transition zone. Remote Sens. Environ. 2007, 110, 357–369. [Google Scholar] [CrossRef]
- Parker, G.G.; Stone, P.J.; Bowers, D. A balloon for microclimate observations within the forest canopy. J. Appl. Ecol. 1996, 33, 173–177. [Google Scholar] [CrossRef]
- Pirotti, F.; Kobal, M.; Roussel, J.R. A comparison of tree segmentation methods using very high density airborne laser scanner data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42W7, 285. [Google Scholar] [CrossRef]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, G.; Pereira, L.; Tomé, M.; Soares, P. 3-D mapping of a multi-layered Mediterranean forest using ALS data. Remote Sens. Environ. 2012, 121, 210–223. [Google Scholar] [CrossRef]
- Zaforemska, A.; Xiao, W.; Gaulton, R. Individual tree detection from UAV LiDAR data in a mixed species woodland. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 657–663. [Google Scholar] [CrossRef]
- Hatton, T.J.; Moore, S.J.; Reece, P.H. Estimating stand transpiration in a Eucalyptus populnea woodland with the heat pulse method: Measurement errors and sampling strategies. Tree Physiol. 1995, 15, 219–227. [Google Scholar] [CrossRef]
- Hatton, T.J.; Wu, H.-I. Scaling theory to extrapolate individual tree water use to stand water use. Hydrol. Process. 1995, 9, 527–540. [Google Scholar] [CrossRef]
- Oren, R.; Phillips, N.; Ewers, B.E.; Pataki, D.E.; Megonigal, J.P. Sap-flux-scaled transpiration responses to light, vapor pressure deficit, and leaf area reduction in a flooded Taxodium distichum forest. Tree Physiol. 1999, 19, 337–347. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Næsset, E.; Gobakken, T. Deriving airborne laser scanning based computational canopy volume for forest biomass and allometry studies. ISPRS J. Photogramm. Remote Sens. 2014, 96, 57–66. [Google Scholar] [CrossRef]
- Cermak, J.; Kucera, J. Scaling up Transpiration Data Between Trees, Stands and Watersheds. Silva Carelica Finl. 1990. Available online: http://agris.fao.org/agris-search/search.do?recordID=FI9500013 (accessed on 20 November 2019).
- Kume, T.; Tsuruta, K.; Komatsu, H.; Shinohara, Y.; Katayama, A.; Ide, J.; Otsuki, K. Differences in sap flux-based stand transpiration between upper and lower slope positions in a Japanese cypress plantation watershed. Ecohydrology 2016, 9, 1105–1116. [Google Scholar] [CrossRef]
- Kumagai, T.; Tateishi, M.; Shimizu, T.; Otsuki, K. Transpiration and canopy conductance at two slope positions in a Japanese cedar forest watershed. Agric. For. Meteorol. 2008, 148, 1444–1455. [Google Scholar] [CrossRef]
- Rembold, K.; Brambach, F.; Waite, P.A. Tree location map and inventory dataset of trees with a DBH ≥ 10 cm in four riparian and four upland plots in Harapan rainforest. Unpublished.
- Kotowska, M.; Waite, P.A. Datasets of aboveground biomass in four upland and four riparian plots in Harapan rainforest. Unpublished.




| Plot | Trees per Plot (n) | DBH (cm) | Height (m) | ||||
|---|---|---|---|---|---|---|---|
| mean | min | max | mean | min | max | ||
| HF1 | 125 | 21.9 | 10.1 | 67.9 | 19.7 | 8.3 | 52.2 |
| HF2 | 172 | 20.1 | 10.4 | 67.5 | 18.4 | 7.8 | 48.0 |
| HF3 | 146 | 22.6 | 10.2 | 80.2 | 21.1 | 4.3 | 44.5 |
| HF4 | 143 | 22.5 | 10.0 | 76.8 | 21.0 | 2.5 | 48.2 |
| HFr1 | 135 | 17.8 | 10.0 | 67.0 | 16.9 | 1.1 | 42.5 |
| HFr2 | 136 | 20.1 | 10.0 | 56.3 | 18.3 | 1.4 | 34.4 |
| HFr3 | 160 | 17.9 | 10.1 | 51.0 | 19.9 | 5.2 | 36.7 |
| HFr4 | 140 | 20.7 | 10.1 | 108.1 | 20.4 | 4.6 | 44.0 |
| Ground-Based Counted Trees | Drone-Based Detected Trees | Difference (%) | True Positive | False Positive | False Negative | Precision | Recall | F-Index | |
|---|---|---|---|---|---|---|---|---|---|
| HF1 | 125 | 162 | 22.8 | 78 | 84 | 40 | 0.48 | 0.68 | 0.56 |
| HF2 | 172 | 181 | 5.0 | 82 | 99 | 65 | 0.45 | 0.60 | 0.52 |
| HF3 | 146 | 159 | 8.2 | 96 | 63 | 44 | 0.60 | 0.59 | 0.60 |
| HF4 | 142 | 151 | 6.0 | 85 | 66 | 51 | 0.56 | 0.56 | 0.56 |
| HFr1 | 135 | 140 | 3.6 | 74 | 66 | 31 | 0.53 | 0.68 | 0.60 |
| HFr2 | 136 | 155 | 12.3 | 86 | 69 | 11 | 0.56 | 0.86 | 0.68 |
| HFr3 | 157 | 140 | 12.1 | 101 | 39 | 33 | 0.72 | 0.54 | 0.62 |
| HFr4 | 140 | 152 | 7.9 | 88 | 64 | 29 | 0.58 | 0.69 | 0.63 |
| Mean | 144 | 155 | 7.0 | 86 | 68 | 38 | 0.56 | 0.65 | 0.60 |
| Plot ID | Drone-Based Detected Trees | Crown Volume (m3) | Crown Surface Area (m2) | Crown Projection Area (m2) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| mean | min | max | mean | min | max | mean | min | max | ||
| HF1 | 162 | 409.1 | 5.4 | 2817.0 | 311.9 | 18.6 | 1217.0 | 30.5 | 3.3 | 165.0 |
| HF2 | 181 | 338.9 | 3.9 | 3659.0 | 260.1 | 18.6 | 1292.0 | 35.6 | 2.5 | 249.6 |
| HF3 | 159 | 512.1 | 1.7 | 4826.0 | 337.5 | 10.9 | 1578.0 | 39.3 | 2.2 | 299.5 |
| HF4 | 151 | 610.3 | 1.4 | 4702.0 | 393.2 | 12.0 | 1493.0 | 45.9 | 2.5 | 251.9 |
| HFr1 | 140 | 121.0 | 0.9 | 843.6 | 141.0 | 7.7 | 588.1 | 12.5 | 1.7 | 49.0 |
| HFr2 | 155 | 61.6 | 0.7 | 427.6 | 90.8 | 7.8 | 353.2 | 10.0 | 2.3 | 38.4 |
| HFr3 | 140 | 153.9 | 1.3 | 1068.0 | 155.9 | 10.1 | 562.7 | 21.4 | 2.3 | 126.6 |
| HFr4 | 152 | 370.5 | 1.6 | 4221.0 | 275.7 | 9.9 | 1376.0 | 35.9 | 1.7 | 298.5 |
| Scaling Approach | R2 | P Value | Mean Tree Water Use (WUmean) kg day−1 | Bootstrapped Scaling Uncertainty % | |
|---|---|---|---|---|---|
| Ground-based measurements | N x WUmean | - | - | 27.63 (measured) | 67.51 |
| DBH (cm) | 0.38 | <0.001 | 27.52 | 50.6 | |
| Drone-based crown metrics | Crown volume (convex hull, m3) | 0.63 | <0.001 | 27.63 | 19.9 |
| Crown surface area (m2) | 0.76 | <0.001 | 27.55 | 17.0 | |
| Crown projection area (m2) | 0.68 | <0.001 | 27.51 | 21.6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahongshangbam, J.; Röll, A.; Ellsäßer, F.; Hendrayanto; Hölscher, D. Airborne Tree Crown Detection for Predicting Spatial Heterogeneity of Canopy Transpiration in a Tropical Rainforest. Remote Sens. 2020, 12, 651. https://doi.org/10.3390/rs12040651
Ahongshangbam J, Röll A, Ellsäßer F, Hendrayanto, Hölscher D. Airborne Tree Crown Detection for Predicting Spatial Heterogeneity of Canopy Transpiration in a Tropical Rainforest. Remote Sensing. 2020; 12(4):651. https://doi.org/10.3390/rs12040651
Chicago/Turabian StyleAhongshangbam, Joyson, Alexander Röll, Florian Ellsäßer, Hendrayanto, and Dirk Hölscher. 2020. "Airborne Tree Crown Detection for Predicting Spatial Heterogeneity of Canopy Transpiration in a Tropical Rainforest" Remote Sensing 12, no. 4: 651. https://doi.org/10.3390/rs12040651
APA StyleAhongshangbam, J., Röll, A., Ellsäßer, F., Hendrayanto, & Hölscher, D. (2020). Airborne Tree Crown Detection for Predicting Spatial Heterogeneity of Canopy Transpiration in a Tropical Rainforest. Remote Sensing, 12(4), 651. https://doi.org/10.3390/rs12040651