Regional Forest Volume Estimation by Expanding LiDAR Samples Using Multi-Sensor Satellite Data

 ,
, 
 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
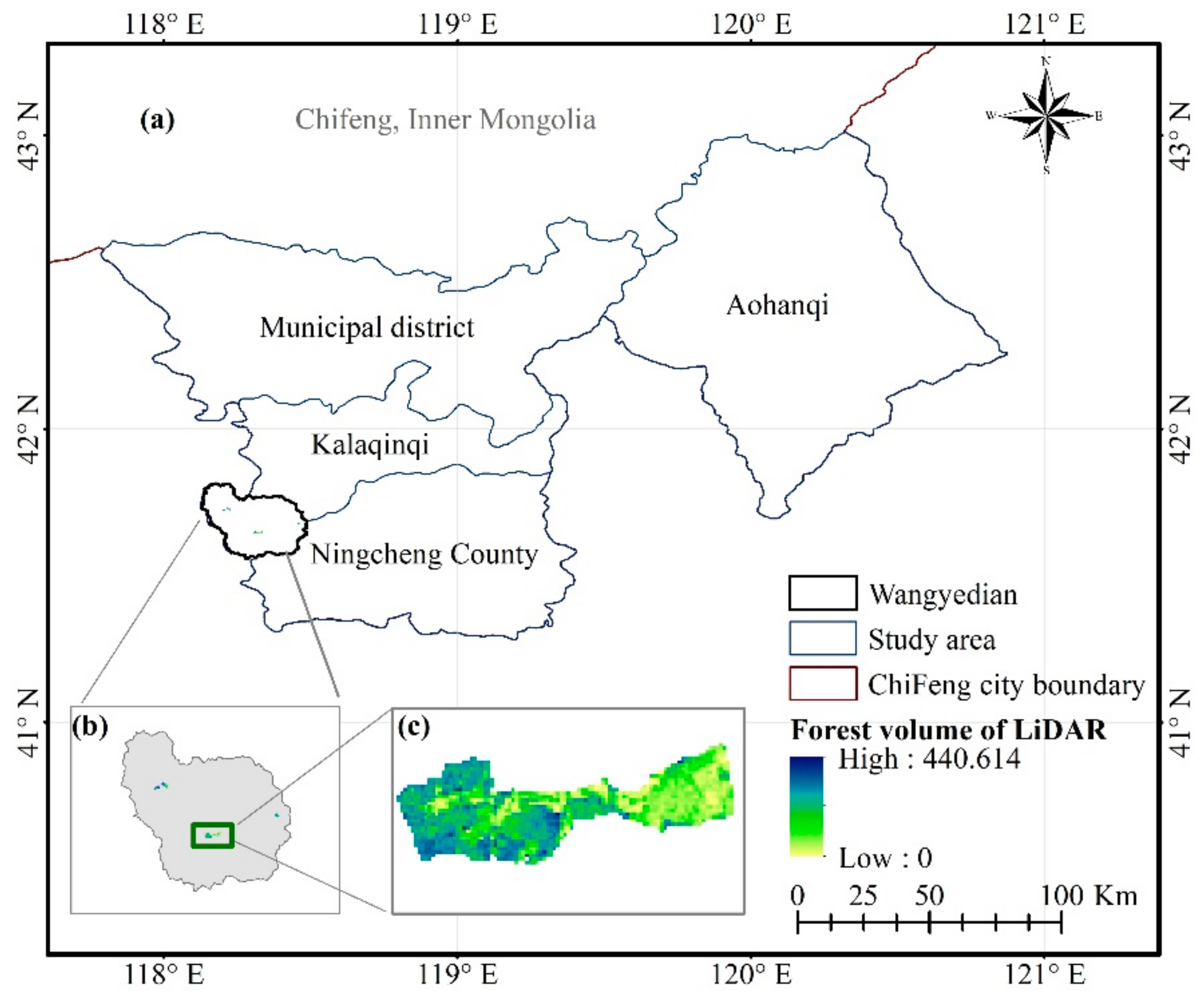
2.1. Chifeng City, Inner Mongolia
2.2. Data Collection
2.2.1. Landsat-8 OLI & Sentinel-1A
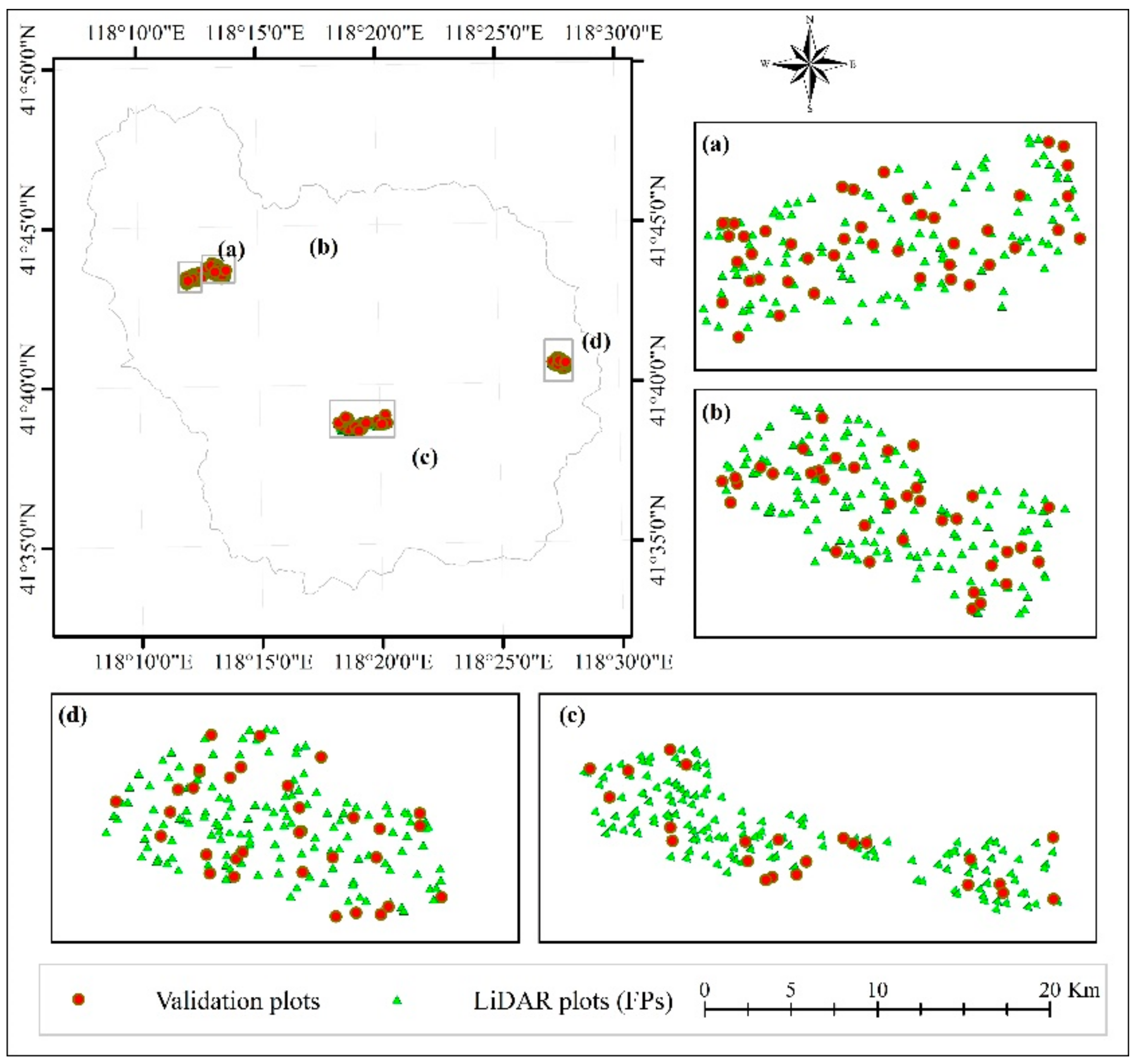
2.2.2. Forest Volume Maps of LiDAR and Field Plots
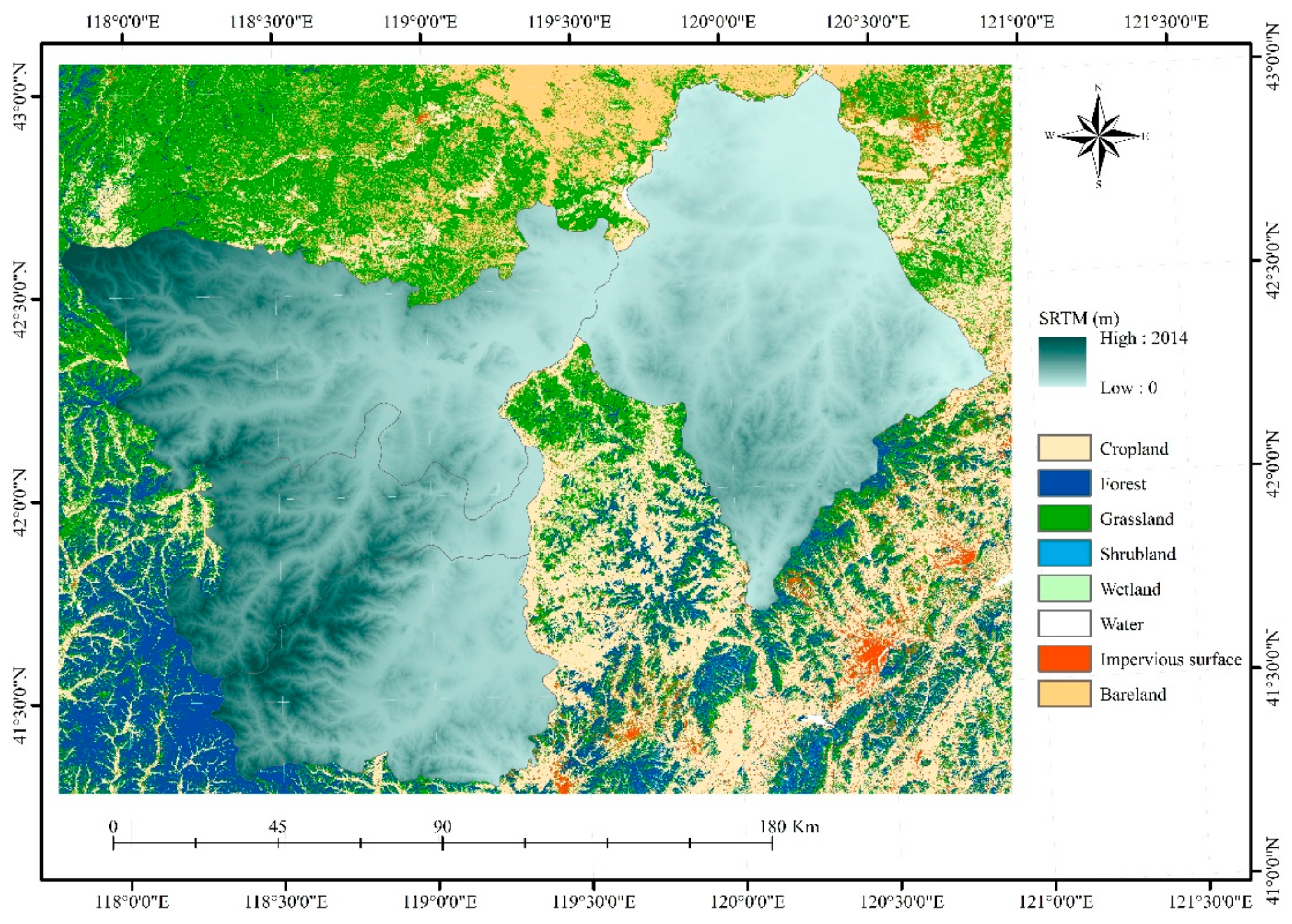
2.2.3. Topographic Data
2.2.4. Auxiliary Data
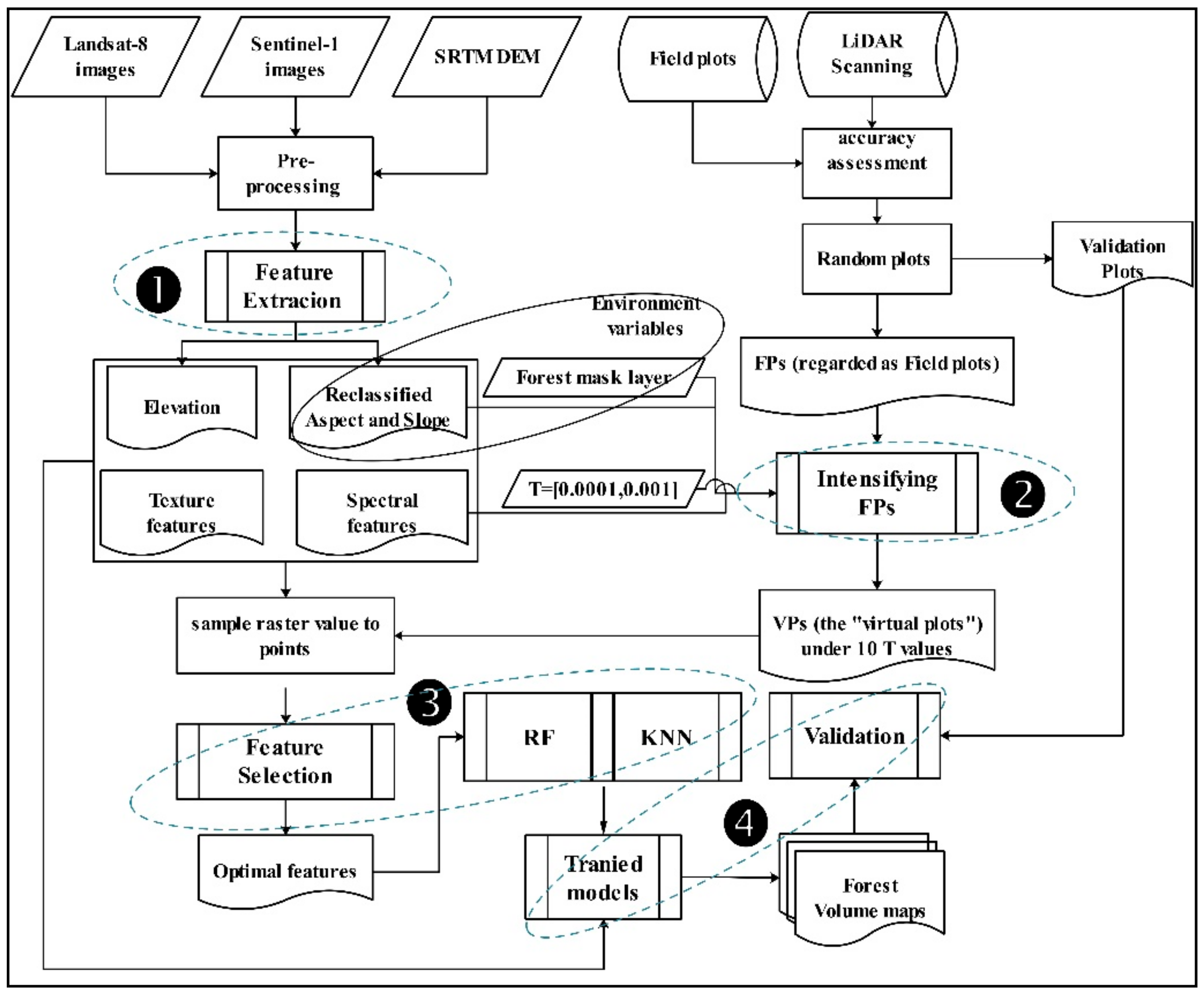
2.3. Methods
2.3.1. Features Extraction from the Satellite Data
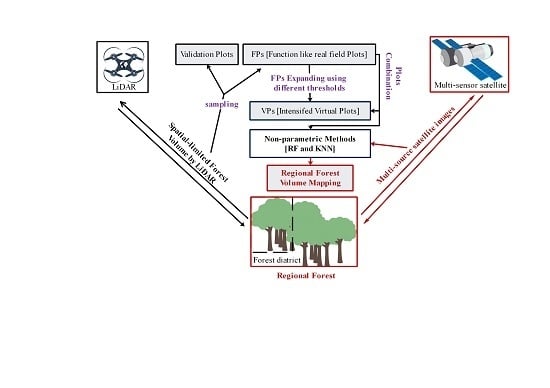
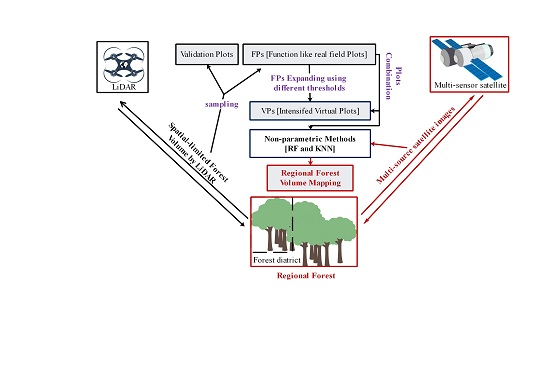
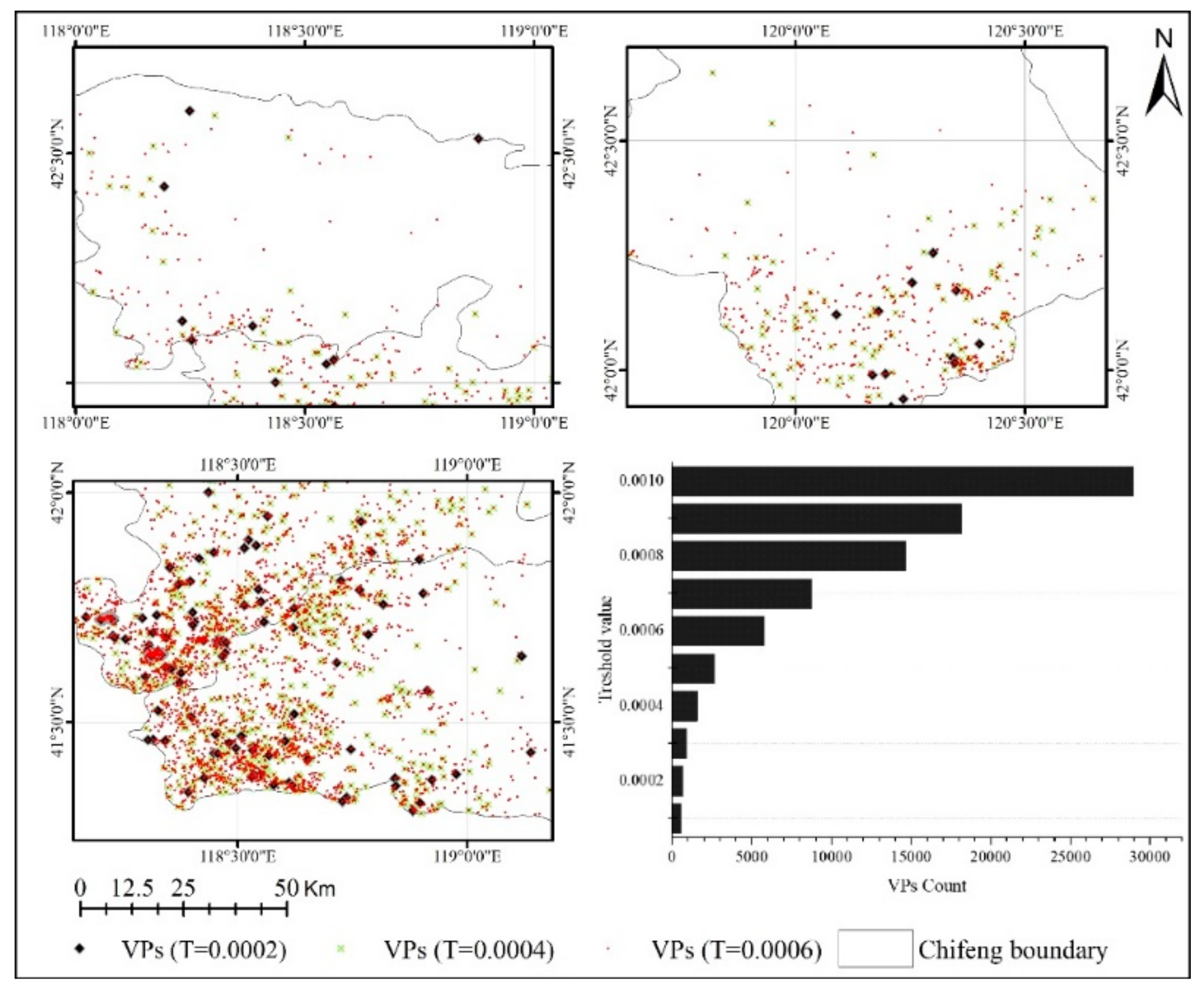
2.3.2. Expanding of LiDAR samples
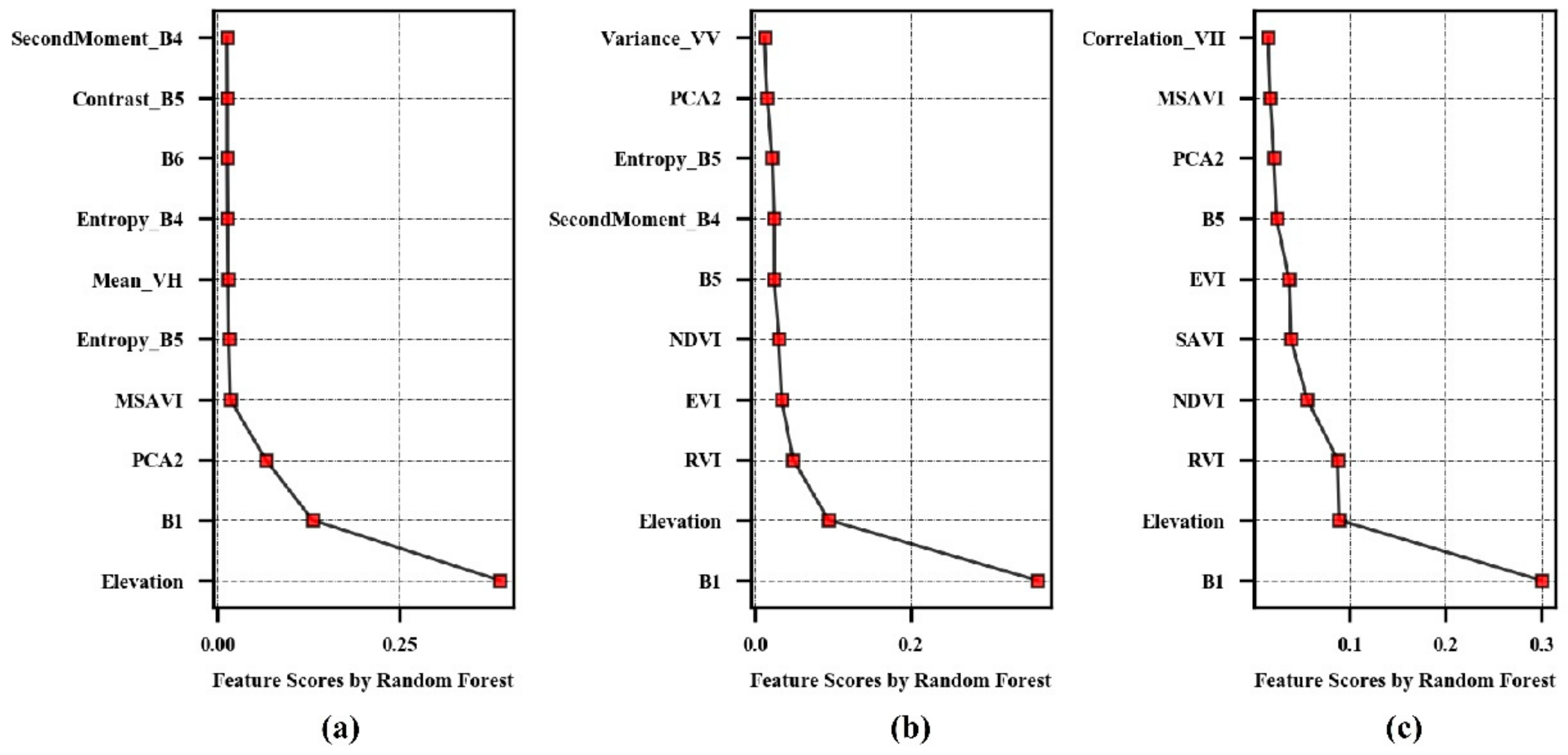
2.3.3. Feature Selection and Modeling
2.3.4. Forest Volume Mapping and Validation
3. Results
3.1. Expanding of LiDAR Samples
3.2. Feature Importance and Modeling
3.3. Optimal Forest Volume Estimation and Validation
4. Discussion
4.1. Samples Extrapolation
4.2. Feature Importance Measure
4.3. Implications and Future Work
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dixon, R.K.; Brown, S.; Houghton, R.A.; Solomon, A.M.; Trexler, M.C.; Wisniewski, J. Carbon Pools and Flux of Global Forest Ecosystems. Science 1994, 263, 185–190. [Google Scholar] [CrossRef] [PubMed]
- Bonan, G.B. Forests and climate change: Forcings, feedbacks, and the climate benefits of forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [PubMed]
- Coomes, D.A.; Allen, R.B. Mortality and tree-size distributions in natural mixed-age forests. J. Ecol. 2007, 95, 27–40. [Google Scholar] [CrossRef]
- Magnussen, S.; Naesset, E.; Gobakken, T. Prediction of tree-size distributions and inventory variables from cumulants of canopy height distributions. Forestry 2013, 86, 583–595. [Google Scholar] [CrossRef]
- Saarinen, N.; Kankare, V.; Vastaranta, M.; Luoma, V.; Pyorala, J.; Tanhuanpaa, T.; Liang, X.L.; Kaartinen, H.; Kukko, A.; Jaakkola, A.; et al. Feasibility of Terrestrial laser scanning for collecting stem volume information from single trees. ISPRS J. Photogramm. Remote Sens. 2017, 123, 140–158. [Google Scholar] [CrossRef]
- Cao, L.; Zhang, Z.N.; Yun, T.; Wang, G.B.; Ruan, H.H.; She, G.H. Estimating Tree Volume Distributions in Subtropical Forests Using Airborne LiDAR Data. Remote Sens. 2019, 11, 33. [Google Scholar] [CrossRef]
- Santoro, M.; Cartus, O.; Fransson, J.E.S.; Shvidenko, A.; McCallum, I.; Hall, R.J.; Beaudoin, A.; Beer, C.; Schmullius, C. Estimates of Forest Growing Stock Volume for Sweden, Central Siberia, and Quebec Using Envisat Advanced Synthetic Aperture Radar Backscatter Data. Remote Sens. 2013, 5, 4503–4532. [Google Scholar] [CrossRef]
- Ripple, W.J.; Wang, S.; Isaacson, D.L.; Paine, D.P. A Preliminary Comparison of Landsat Thematic Mapper and Spot-1 Hrv Multispectral Data for Estimating Coniferous Forest Volume. Int. J. Remote Sens. 1991, 12, 1971–1977. [Google Scholar] [CrossRef]
- Tinkham, W.T.; Smith, A.M.S.; Affleck, D.L.R.; Saralecos, J.D.; Falkowski, M.J.; Hoffman, C.M.; Hudak, A.T.; Wulder, M.A. Development of Height-Volume Relationships in Second Growth Abies grandis for Use with Aerial LiDAR. Can. J. Remote Sens. 2016, 42, 400–410. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Acker, S.A.; Parker, G.G.; Spies, T.A.; Harding, D. Lidar remote sensing of the canopy structure and biophysical properties of Douglas-fir western hemlock forests. Remote Sens. Environ. 1999, 70, 339–361. [Google Scholar] [CrossRef]
- Takahashi, T.; Yamamoto, K.; Senda, Y.; Tsuzuku, M. Predicting individual stem volumes of sugi (Cryptomeria japonica D. Don) plantations in mountainous areas using small-footprint airborne LiDAR. J. For. Res. 2005, 10, 305–312. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Popescu, S.C.; Zhao, K. A voxel-based lidar method for estimating crown base height for deciduous and pine trees. Remote Sens. Environ. 2008, 112, 767–781. [Google Scholar] [CrossRef]
- Tonolli, S.; Dalponte, M.; Vescovo, L.; Rodeghiero, M.; Bruzzone, L.; Gianelle, D. Mapping and modeling forest tree volume using forest inventory and airborne laser scanning. Eur. J. For. Res. 2011, 130, 569–577. [Google Scholar] [CrossRef]
- Strunk, J.L.; Reutebuch, S.E.; Andersen, H.E.; Gould, P.J.; McGaughey, R.J. Model-Assisted Forest Yield Estimation with Light Detection and Ranging. West. J. Appl. For. 2012, 27, 53–59. [Google Scholar] [CrossRef]
- Tao, S.L.; Guo, Q.H.; Li, L.; Xue, B.L.; Kelly, M.; Li, W.K.; Xu, G.C.; Su, Y.J. Airborne Lidar-derived volume metrics for aboveground biomass estimation: A comparative assessment for conifer stands. Agric. For. Meteorol. 2014, 198, 24–32. [Google Scholar] [CrossRef]
- Li, W.; Niu, Z.; Huang, N.; Wang, C.; Gao, S.; Wu, C.Y. Airborne LiDAR technique for estimating biomass components of maize: A case study in Zhangye City, Northwest China. Ecol. Indic. 2015, 57, 486–496. [Google Scholar] [CrossRef]
- Tompalski, P.; Coops, N.C.; Marshall, P.L.; White, J.C.; Wulder, M.A.; Bailey, T. Combining Multi-Date Airborne Laser Scanning and Digital Aerial Photogrammetric Data for Forest Growth and Yield Modelling. Remote Sens. 2018, 10, 347. [Google Scholar] [CrossRef]
- Lo, C.S.; Lin, C.S. Growth-Competition-Based Stem Diameter and Volume Modeling for Tree-Level Forest Inventory Using Airborne LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2216–2226. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Hudak, A.T.; Crookston, N.L.; Gessler, P.E.; Uebler, E.H.; Smith, A.M.S. Landscape-scale parameterization of a tree-level forest growth model: A k-nearest neighbor imputation approach incorporating LiDAR data. Can. J. For. Res.-Rev. Can. Rech. For. 2010, 40, 184–199. [Google Scholar] [CrossRef]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.J.; et al. Imputation of Individual Longleaf Pine (Pinus palustris Mill.) Tree Attributes from Field and LiDAR Data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Hickey, M.P.; Taylor, M.J.; Gardner, C.S. Full-wave modeling of small-scale gravity waves using Airborne Lidar and Observations of the Hawaiian Airglow (ALOHA-93) O(S-1) images and coincident Na wind/temperature lidar measurements (vol 107, pg 4357, 2002). J. Geophys. Res.-Atmos. 2002, 107. [Google Scholar] [CrossRef]
- Xu, C.; Morgenroth, J.; Manley, B. Mapping Net Stocked Plantation Area for Small-Scale Forests in New Zealand Using Integrated RapidEye and LiDAR Sensors. Forests 2017, 8, 487. [Google Scholar] [CrossRef]
- Xu, C.; Manley, B.; Morgenroth, J. Evaluation of modelling approaches in predicting forest volume and stand age for small-scale plantation forests in New Zealand with RapidEye and LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 386–396. [Google Scholar] [CrossRef]
- Tesfamichael, S.G.; van Aardt, J.A.N.; Ahmed, F. Estimating plot-level tree height and volume of Eucalyptus grandis plantations using small-footprint, discrete return lidar data. Prog. Phys. Geogr. 2010, 34, 515–540. [Google Scholar] [CrossRef]
- Clementel, F.; Colle, G.; Farruggia, C.; Floris, A.; Scrinzi, G.; Torresan, C. Estimating forest timber volume by means of “low-cost” LiDAR data. Ital. J. Remote Sens. 2012, 44, 125–140. [Google Scholar] [CrossRef]
- Palleja, T.; Tresanchez, M.; Teixido, M.; Sanz, R.; Rosell, J.R.; Palacin, J. Sensitivity of tree volume measurement to trajectory errors from a terrestrial LIDAR scanner. Agric. For. Meteorol. 2010, 150, 1420–1427. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Peterson, D.L.; Aber, J.D.; Matson, P.A.; Card, D.H.; Swanberg, N.; Wessman, C.; Spanner, M. Remote-Sensing of Forest Canopy and Leaf Biochemical Contents. Remote Sens. Environ. 1988, 24, 85–108. [Google Scholar] [CrossRef]
- Collins, J.B.; Woodcock, C.E. An assessment of several linear change detection techniques for mapping forest mortality using multitemporal landsat TM data. Remote Sens. Environ. 1996, 56, 66–77. [Google Scholar] [CrossRef]
- Carpenter, G.A.; Gjaja, M.N.; Gopal, S.; Woodcock, C.E. ART neural networks for remote sensing: Vegetation classification from Landsat TM and terrain data. IEEE Trans. Geosci. Remote Sens. 1997, 35, 308–325. [Google Scholar] [CrossRef]
- Gu, H.Y.; Dai, L.M.; Wu, G.; Xu, D.; Wang, S.Z.; Wang, H. Estimation of forest volumes by integrating Landsat TM imagery and forest inventory data. Sci. China Ser. E-Technol. Sci. 2006, 49, 54–62. [Google Scholar] [CrossRef]
- Tokola, T. The influence of field sample data location on growing stock volume estimation in landsat TM-based forest inventory in eastern Finland. Remote Sens. Environ. 2000, 74, 422–431. [Google Scholar] [CrossRef]
- Mura, M.; Bottalico, F.; Giannetti, F.; Bertani, R.; Giannini, R.; Mancini, M.; Orlandini, S.; Travaglini, D.; Chirici, G. Exploiting the capabilities of the Sentinel-2 multi spectral instrument for predicting growing stock volume in forest ecosystems. Int. J. Appl. Earth Obs. Geoinf. 2018, 66, 126–134. [Google Scholar] [CrossRef]
- Chrysafis, I.; Mallinis, G.; Tsakiri, M.; Patias, P. Evaluation of single-date and multi-seasonal spatial and spectral information of Sentinel-2 imagery to assess growing stock volume of a Mediterranean forest. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 1–14. [Google Scholar] [CrossRef]
- Santoro, M.; Eriksson, L.; Schmullius, C.; Wiesmann, A. Seasonal and Topographic Effects on Growing Stock Volume Estimates from JERS-1 Backscatter in Siberian Forests; Millpress Science Publishers: Rotterdam, The Netherlands, 2004; pp. 151–158. [Google Scholar]
- Santoro, M.; Wegmuller, U.; Askne, J. Forest stem volume estimation using C-band interferometric SAR coherence data of the ERS-1 mission 3-days repeat-interval phase. Remote Sens. Environ. 2018, 216, 684–696. [Google Scholar] [CrossRef]
- Wang, C.L.; Niu, C.; Cong, P.F.; Lin, W.P.; Guo, Z.X.; IEEE. Retrieval Forest Stock Volume of Large Plantation in South China Using RADARSAT-SAR; IEEE: New York, NY, USA, 2005; pp. 3051–3054. [Google Scholar]
- Wilhelm, S.; Huttich, C.; Korets, M.; Schmullius, C. Large Area Mapping of Boreal Growing Stock Volume on an Annual and Multi-Temporal Level Using PALSAR L-Band Backscatter Mosaics. Forests 2014, 5, 1999–2015. [Google Scholar] [CrossRef]
- Cartus, O.; Kellndorfer, J.; Rombach, M.; Walker, W. Mapping Canopy Height and Growing Stock Volume Using Airborne Lidar, ALOS PALSAR and Landsat ETM. Remote Sens. 2012, 4, 3320–3345. [Google Scholar] [CrossRef]
- Mauya, E.W.; Koskinen, J.; Tegel, K.; Hamalainen, J.; Kauranne, T.; Kayhko, N. Modelling and Predicting the Growing Stock Volume in Small-Scale Plantation Forests of Tanzania Using Multi-Sensor Image Synergy. Forests 2019, 10, 21. [Google Scholar] [CrossRef]
- Steinmann, K.; Mandallaz, D.; Ginzler, C.; Lanz, A. Small area estimations of proportion of forest and timber volume combining Lidar data and stereo aerial images with terrestrial data. Scand. J. For. Res. 2013, 28, 373–385. [Google Scholar] [CrossRef]
- Hawrylo, P.; Wezyk, P. Predicting Growing Stock Volume of Scots Pine Stands Using Sentinel-2 Satellite Imagery and Airborne Image-Derived Point Clouds. Forests 2018, 9, 274. [Google Scholar] [CrossRef]
- Puliti, S.; Saarela, S.; Gobakken, T.; Stahl, G.; Naesset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Saarela, S.; Grafstrom, A.; Stahl, G.; Kangas, A.; Holopainen, M.; Tuominen, S.; Nordkvist, K.; Hyyppa, J. Model-assisted estimation of growing stock volume using different combinations of LiDAR and Landsat data as auxiliary information. Remote Sens. Environ. 2015, 158, 431–440. [Google Scholar] [CrossRef]
- Huang, S.; Ramirez, C.; Kennedy, K.; Mallory, J. A New Approach to Extrapolate Forest Attributes from Field Inventory with Satellite and Auxiliary Data Sets. For. Sci. 2016, 63, 232–240. [Google Scholar] [CrossRef]
- Huang, S.; Ramirez, C.; Conway, S.; Kennedy, K.; Kohler, T.; Liu, J. Mapping site index and volume increment from forest inventory, Landsat, and ecological variables in Tahoe National Forest, California, USA. Can. J. For. Res. 2017, 47, 113–124. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Lee, J.S.H.; Wich, S.; Widayati, A.; Koh, L.P. Detecting industrial oil palm plantations on Landsat images with Google Earth Engine. Remote Sens. Appl. Soc. Environ. 2016, 4, 219–224. [Google Scholar] [CrossRef]
- Teluguntla, P.; Thenkabail, P.S.; Oliphant, A.; Xiong, J.; Gumma, M.K.; Congalton, R.G.; Yadav, K.; Huete, A. A 30-m landsat-derived cropland extent product of Australia and China using random forest machine learning algorithm on Google Earth Engine cloud computing platform. ISPRS J. Photogramm. Remote Sens. 2018, 144, 325–340. [Google Scholar] [CrossRef]
- Xiong, J.; Thenkabail, P.S.; Gumma, M.K.; Teluguntla, P.; Poehnelt, J.; Congalton, R.G.; Yadav, K.; Thau, D. Automated cropland mapping of continental Africa using Google Earth Engine cloud computing. ISPRS J. Photogramm. Remote Sens. 2017, 126, 225–244. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance produc t. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef]
- Ko, B.C.; Kim, H.H.; Nam, J.Y. Classification of Potential Water Bodies Using Landsat 8 OLI and a Combination of Two Boosted Random Forest Classifiers. Sensors 2015, 15, 13763–13777. [Google Scholar] [CrossRef] [PubMed]
- Phua, M.H.; Johari, S.A.; Wong, O.C.; Ioki, K.; Mahali, M.; Nilus, R.; Coomes, D.A.; Maycock, C.R.; Hashim, M. Synergistic use of Landsat 8 OLI image and airborne LiDAR data for above-ground biomass estimation in tropical lowland rainforests. For. Ecol. Manag. 2017, 406, 163–171. [Google Scholar] [CrossRef]
- Sonobe, R.; Yamaya, Y.; Tani, H.; Wang, X.F.; Kobayashi, N.; Mochizuki, K. Evaluating metrics derived from Landsat 8 OLI imagery to map crop cover. Geocarto Int. 2019, 34, 839–855. [Google Scholar] [CrossRef]
- Rodriguez, E.; Morris, C.S.; Belz, J.E. A global assessment of the SRTM performance. Photogramm. Eng. Remote Sens. 2006, 72, 249–260. [Google Scholar] [CrossRef]
- Prasannakumar, V.; Shiny, R.; Geetha, N.; Vijith, H. Applicability of SRTM data for landform characterisation and geomorphometry: A comparison with contour-derived parameters. Int. J. Digit. Earth 2011, 4, 387–401. [Google Scholar] [CrossRef]
- Pour, A.B.; Hashim, M. Regional Geolgical Mapping in Tropical Environments Using Landsat Tm and Srtm Remote Sensing Data. In Proceedings of the ISPRS Joint International Geoinformation Conference 2015, Kuala Lumpur, Malaysia, 28–30 October 2015; Rahman, A.A., Isikdag, U., Castro, F.A., Eds.; Volume II-2, pp. 93–98. [Google Scholar]
- Ustun, A.; Abbak, R.A.; Ozturk, E.Z. Height biases of SRTM DEM related to EGM96: From a global perspective to regional practice. Surv. Rev. 2018, 50, 26–35. [Google Scholar] [CrossRef]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.C.; Zhao, Y.Y.; Liang, L.; Niu, Z.G.; Huang, X.M.; Fu, H.H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Pavlov, Y.L. Random Forests; VSP: Utrecht, The Netherlands, 1997; pp. 11–18. [Google Scholar]
- Gauza, D.; Zukowska, A.; Nowak, R. K-nearest neighbors clustering algorithm. In Photonics Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments 2014; Romaniuk, R.S., Ed.; International Society for Optics and Photonics: San Diego, CA, USA, 2014; Volume 9290. [Google Scholar]
- Jaiswal, J.K.; Samikannu, R.; IEEE. Application of Random Forest Algorithm on Feature Subset Selection and Classification and Regression; IEEE: Tiruchirappalli, India, 2017; pp. 65–68. [Google Scholar] [CrossRef]
- Roy, S.S.; Pratyush, C.; Barna, C. Predicting Ozone Layer Concentration Using Multivariate Adaptive Regression Splines, Random Forest and Classification and Regression Tree. In Soft Computing Applications, Sofa 2016, Vol 2; Balas, V.E., Jain, L.C., Balas, M.M., Eds.; Springer: Cham, Switzerland, 2018; Volume 634, pp. 140–152. [Google Scholar]
- Kumar, T.; IEEE. Solution of Linear and Non Linear Regression Problem by K Nearest Neighbour Approach; IEEE: Ghaziabad, India, 2015; pp. 197–201. [Google Scholar] [CrossRef]
- Bo, C.J.; Wang, D.; Lu, H.C. Hyperspectral Image Classification via a Joint Weighted K-Nearest Neighbour Approach. In Computer Vision—Accv 2016 Workshops, Pt I; Chen, C.S., Lu, J., Ma, K.K., Eds.; Springer: Cham, Switzerland, 2017; Volume 10116, pp. 349–360. [Google Scholar]
- Chirici, G.; Barbati, A.; Corona, P.; Marchetti, M.; Travaglini, D.; Maselli, F.; Bertini, R. Non-parametric and parametric methods using satellite images for estimating growing stock volume in alpine and Mediterranean forest ecosystems. Remote Sens. Environ. 2008, 112, 2686–2700. [Google Scholar] [CrossRef]
- Huang, H.B.; Liu, C.X.; Wang, X.Y. Constructing a Finer-Resolution Forest Height in China Using ICESat/GLAS, Landsat and ALOS PALSAR Data and Height Patterns of Natural Forests and Plantations. Remote Sens. 2019, 11, 17. [Google Scholar] [CrossRef]
- Brosofske, K.D.; Froese, R.E.; Falkowski, M.J.; Banskota, A. A Review of Methods for Mapping and Prediction of Inventory Attributes for Operational Forest Management. For. Sci. 2014, 60, 733–756. [Google Scholar] [CrossRef]
- Mellor, A.; Haywood, A.; Stone, C.; Jones, S. The Performance of Random Forests in an Operational Setting for Large Area Sclerophyll Forest Classification. Remote Sens. 2013, 5, 2838–2856. [Google Scholar] [CrossRef]
- Nicodemus, K.K. Letter to the Editor: On the stability and ranking of predictors from random forest variable importance measures. Brief. Bioinform. 2011, 12, 369–373. [Google Scholar] [CrossRef] [PubMed]
- Belgiu, M.; Dragut, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Behnamian, A.; Millard, K.; Banks, S.N.; White, L.; Richardson, M.; Pasher, J. A Systematic Approach for Variable Selection With Random Forests: Achieving Stable Variable Importance Values. IEEE Geosci. Remote Sens. 2017, 14, 1988–1992. [Google Scholar] [CrossRef]
- Boonprong, S.; Cao, C.X.; Chen, W.; Bao, S.N. Random Forest Variable Importance Spectral Indices Scheme for Burnt Forest Recovery MonitoringMultilevel RF-VIMP. Remote Sens. 2018, 10, 807. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Kalogirou, S.; Wolff, E. Less is more: Optimizing classification performance through feature selection in a very-high-resolution remote sensing object-based urban application (vol 55, pg 221, 2017). GISci. Remote Sens. 2018, 55, 221–242. [Google Scholar] [CrossRef]
- Stage, A.R.; Salas, C. Interactions of elevation, aspect, and slope in models of forest species composition and productivity. For. Sci. 2007, 53, 486–492. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Acquisition Dates (Year-Month-Day) | Number of Scenes |
|---|---|---|
| Landsat-8 OLI | 2017-09-21 | 2 |
| 2017-09-23 | 1 | |
| 2017-09-28 | 2 | |
| 2017-09-30 | 3 | |
| Sentinel-1A | 2017-09-23 | 2 |
| 2017-09-24 | 2 | |
| 2017-09-28 | 1 | |
| 2017-09-30 | 2 |
| Name | Code |
|---|---|
| Cropland | 1 |
| Forest | 2 |
| Grassland | 3 |
| Shrubland | 4 |
| Wetland | 5 |
| Water | 6 |
| Tundra | 7 |
| Impervious surface | 8 |
| Bareland | 9 |
| Snow/Ice | 10 |
| Slope Levels | Aspect Categories | ||||
|---|---|---|---|---|---|
| Value (°) | Name | Flag | Value (°) | Name | Flag |
| 5 | flat | 0 | −2–0 | Flat| non-directional | 0 |
| 5–14 | gentle | 1 | 0–22.5 | North|Shady | 1 |
| 15–24 | slope | 2 | 337.5–360 | North|Shady | 1 |
| 25–34 | Steep | 3 | 292.5–337.5 | NorthWest|Shady | 1 |
| 35–44 | Acute | 4 | 22.5–67.5 | NorthEast|Shady | 1 |
| 45 | Dangerous | 5 | 67.5–112.5 | East|Sunny | 2 |
| 112.5–157.5 | SouthEast|Sunny | 2 | |||
| 157.5–202.5 | South|Sunny | 2 | |||
| 202.5–247.5 | SouthWest|Sunny | 2 | |||
| 247.5–292.5 | West|Sunny | 2 | |||
| Algorithm Type | Hyperparameter Name | Interval | Step Length |
|---|---|---|---|
| RF | n_estimators | [10,60] | 3 |
| max_depth | [1,35] | 2 | |
| KNN | n_neighbors | [2,15] | 1 |
| weights | [‘uniform’, ‘distance’] | ||
| p | [1,4] | 1 |
| Location | Forest Volume Value (m3/ha) | Accuracy Assessment | ||
|---|---|---|---|---|
| Lat | Lon | Ground Truth Value | LiDAR Estimation | |
| 41.7257 | 118.2260 | 198.93 | 204.10 | 26.89 m3/ha (RMSE) 0.76 (R Squared) 84.10% (accuracy) |
| 41.7257 | 118.2270 | 191.19 | 198.52 | |
| 41.7260 | 118.2180 | 279.40 | 239.36 | |
| 41.7265 | 118.2210 | 187.47 | 174.14 | |
| 41.7276 | 118.2130 | 324.08 | 208.35 | |
| 41.7295 | 118.2150 | 218.26 | 160.37 | |
| 41.6472 | 118.3310 | 64.39 | 51.74 | |
| 41.6468 | 118.3320 | 63.13 | 58.78 | |
| 41.6463 | 118.3340 | 57.68 | 62.02 | |
| 41.6473 | 118.3330 | 55.12 | 57.94 | |
| 41.6467 | 118.3220 | 154.63 | 160.63 | |
| 41.6463 | 118.3240 | 159.58 | 171.90 | |
| 41.6467 | 118.3240 | 93.74 | 179.40 | |
| 41.6454 | 118.3180 | 251.41 | 224.48 | |
| 41.6461 | 118.3190 | 229.69 | 224.30 | |
| 41.6455 | 118.3090 | 233.76 | 185.30 | |
| 41.6462 | 118.3110 | 204.70 | 195.90 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, B.; Cao, C.; Xu, M.; Bashir, B.; Singh, R.P.; Huang, Z.; Lin, X. Regional Forest Volume Estimation by Expanding LiDAR Samples Using Multi-Sensor Satellite Data. Remote Sens. 2020, 12, 360. https://doi.org/10.3390/rs12030360
Xie B, Cao C, Xu M, Bashir B, Singh RP, Huang Z, Lin X. Regional Forest Volume Estimation by Expanding LiDAR Samples Using Multi-Sensor Satellite Data. Remote Sensing. 2020; 12(3):360. https://doi.org/10.3390/rs12030360
Chicago/Turabian StyleXie, Bo, Chunxiang Cao, Min Xu, Barjeece Bashir, Ramesh P. Singh, Zhibin Huang, and Xiaojuan Lin. 2020. "Regional Forest Volume Estimation by Expanding LiDAR Samples Using Multi-Sensor Satellite Data" Remote Sensing 12, no. 3: 360. https://doi.org/10.3390/rs12030360
APA StyleXie, B., Cao, C., Xu, M., Bashir, B., Singh, R. P., Huang, Z., & Lin, X. (2020). Regional Forest Volume Estimation by Expanding LiDAR Samples Using Multi-Sensor Satellite Data. Remote Sensing, 12(3), 360. https://doi.org/10.3390/rs12030360