Using Remote Sensing Techniques to Document and Identify the Largest Underwater Object of the Baltic Sea: Case Study of the Only German Aircraft Carrier, Graf Zeppelin


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Historical Background
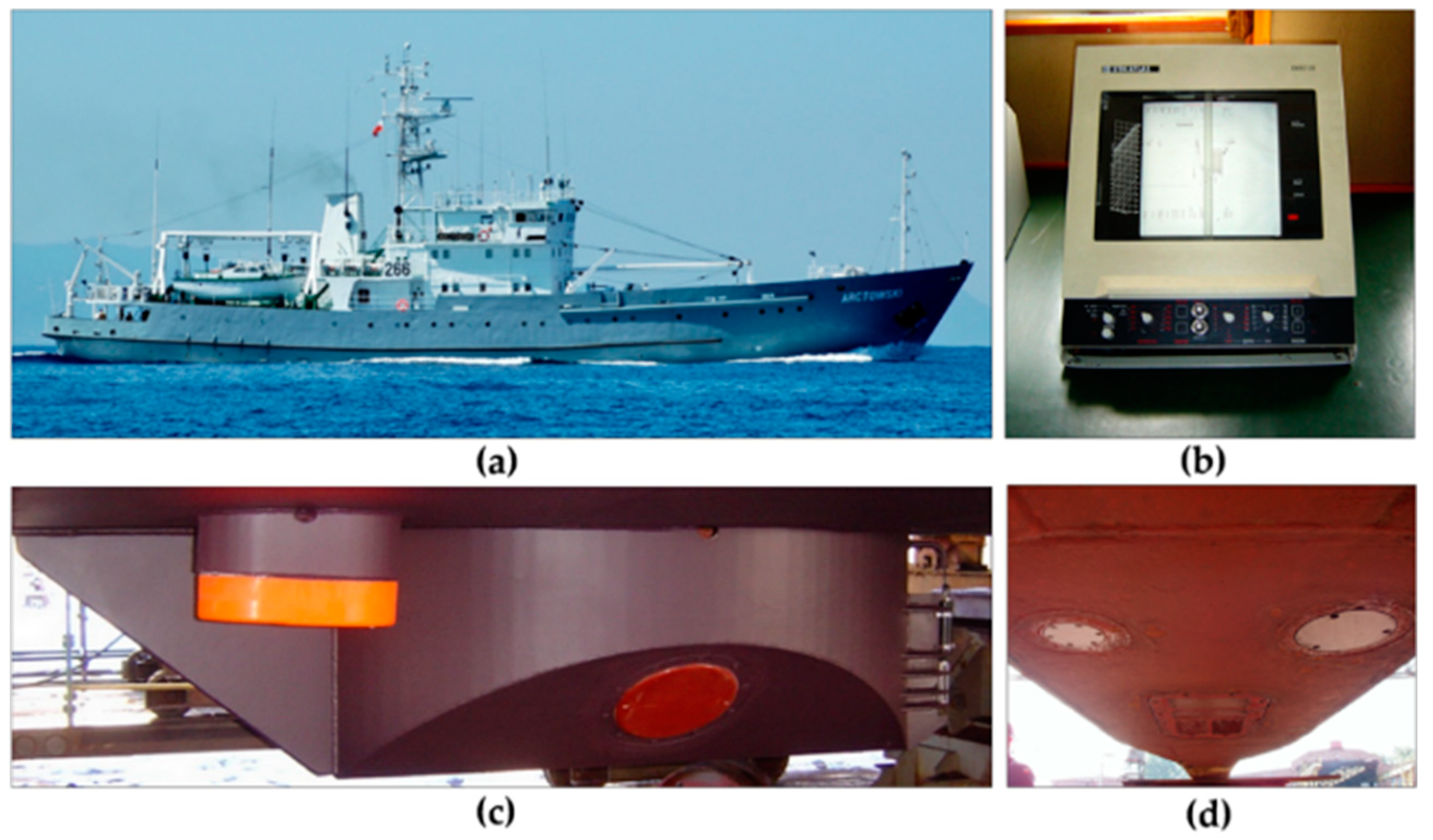
2.3. Survey Planning and Acquisition of Bathymetric Data
2.4. Mapping the Shipwreck-Site with Side-Scan Sonar
2.5. Imaging the Shipwreck with a Scanning Sonar—A New Unconventional Use
3. Results and Discussion
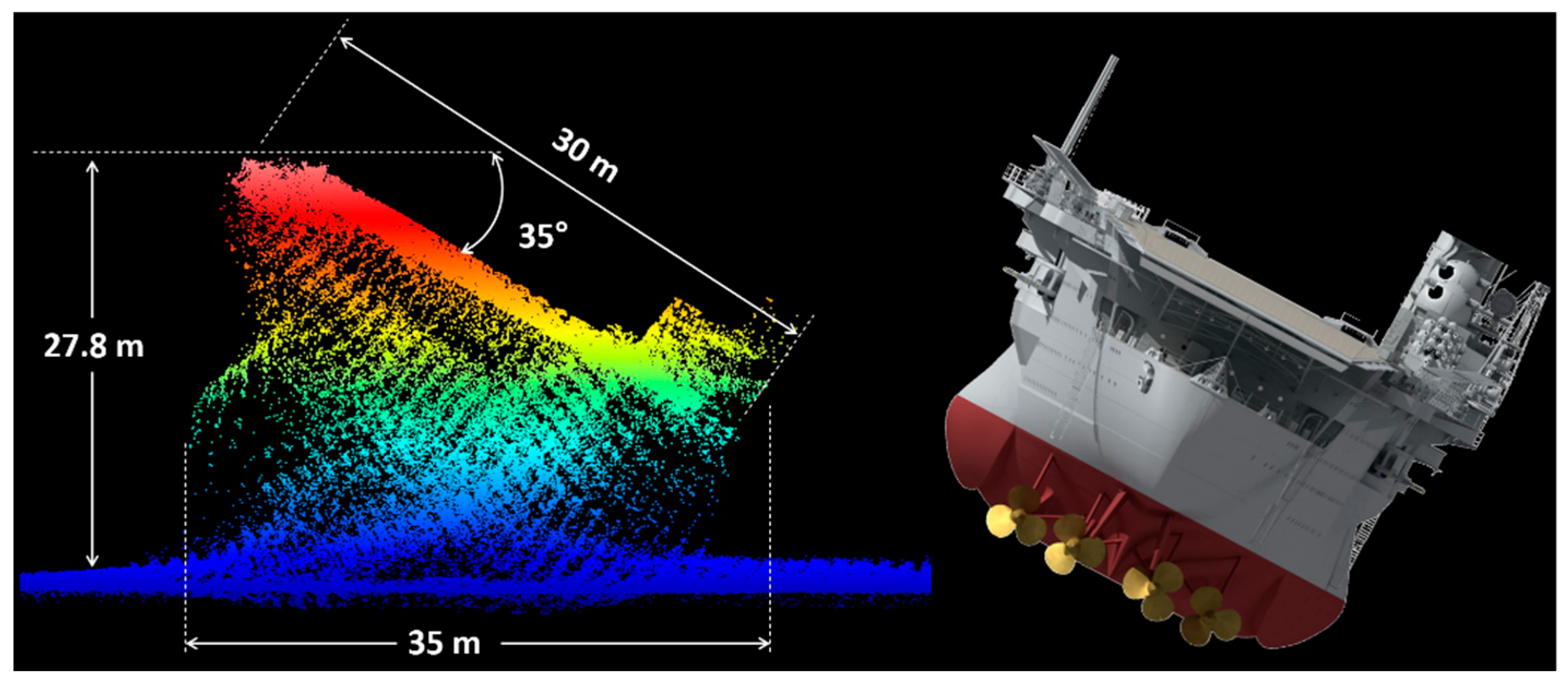
3.1. Bathymetric Survey Results
- (a)
- The lying depth of the wreck is Zs = 87.8 m;
- (b)
- The wreck length is L = 260 m;
- (c)
- The minimum depth above the wreck Zmin = 60 m;
- (d)
- The wreck is not on the even keel, it is leaning to one side;
- (e)
- The wreck height is Hs = 27.8 m.
- (a)
- The wreck has a 35-degree heel angle to starboard side;
- (b)
- Minimum depths Zmin = 58.9 m are in the stern part of the wreck on the port side;
- (c)
- The wreck lies at 059.3 degrees;
- (d)
- The wreck width on the aircraft deck is equal to 30 m;
- (e)
- The fore and aft airlift have dimensions of 13 × 13 m;
- (f)
- The lying depth of the wreck is Zs = 87.8 m;
- (g)
- Part of the aircraft carrier superstructure (island) is destroyed, its length is 62 m;
- (h)
- The wreck height is Hs = 27.8 m;
- (i)
- The amidship’s opening in the place of the airlift and the engine room is 56 × 13 m.
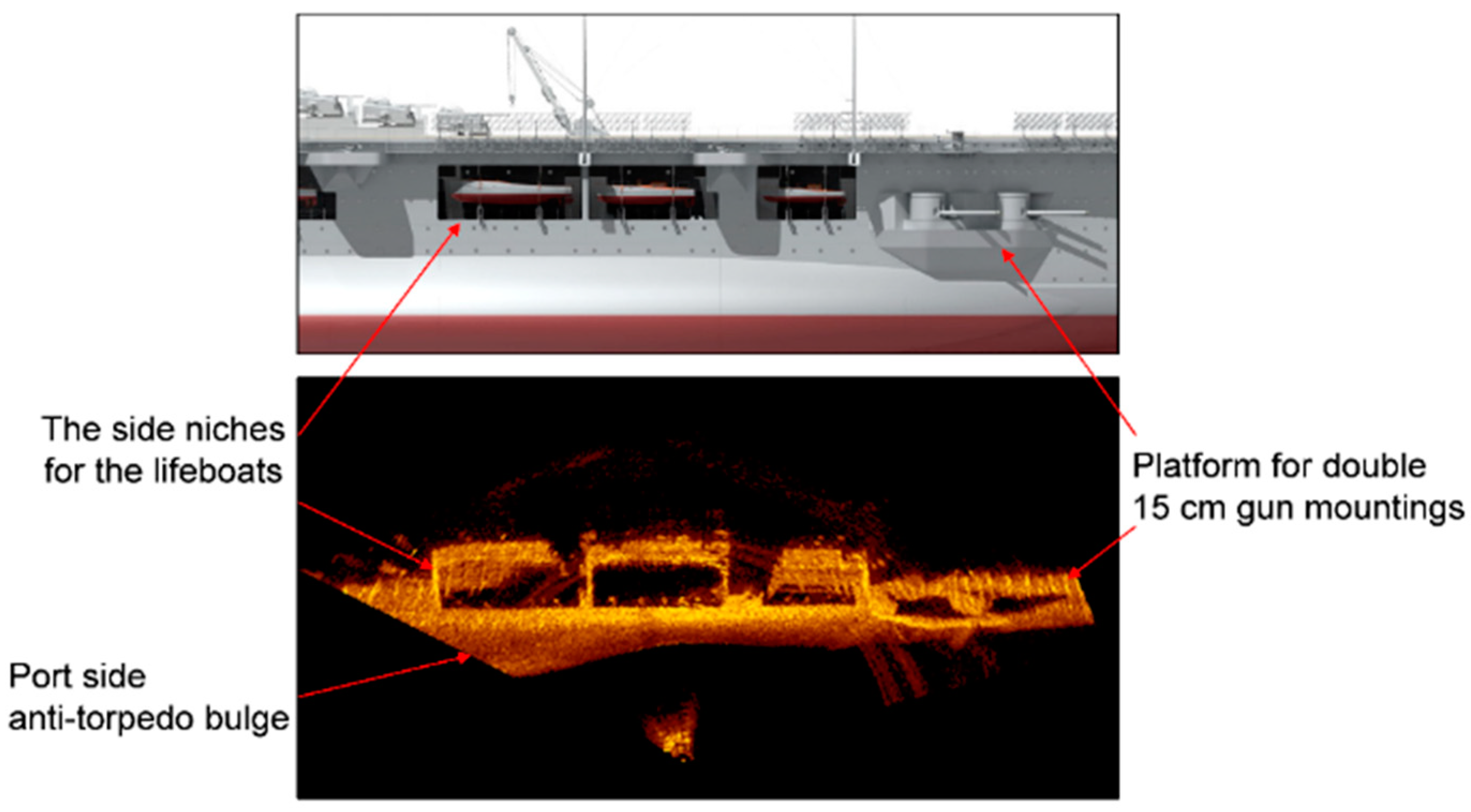
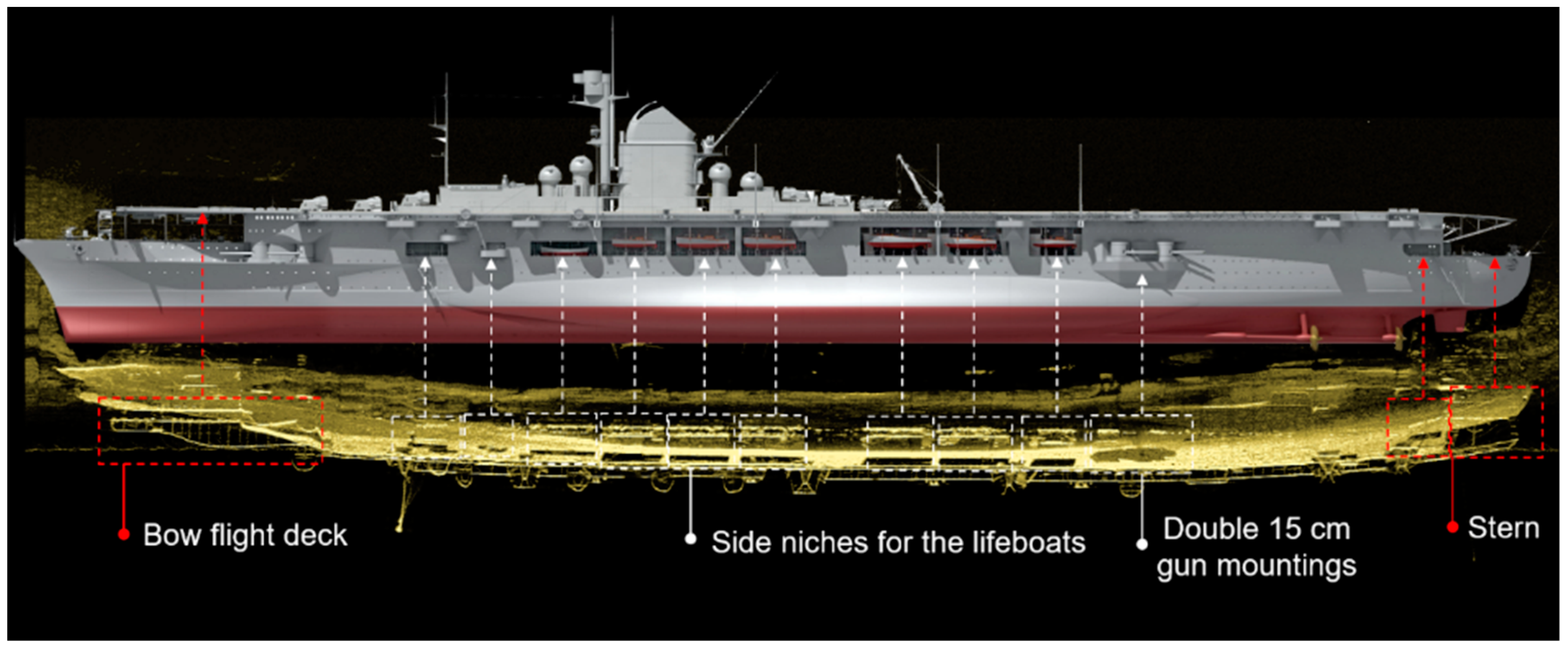
3.2. Sonar Investigation Results
3.3. The Identification of a Newly Discovered Shipwreck
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Ødegård, Ø.; Sørensen, A.J.; Hansen, R.E.; Ludvigsen, M. A new method for underwater archaeological surveying using sensors and unmanned platforms. IFAC-PapersOnLine 2016, 49, 486–493. [Google Scholar] [CrossRef]
- Allen, Y.C.; Wilson, C.A.; Roberts, H.H.; Supan, J. High resolution mapping and classification of oyster habitats in nearshore Louisiana using sidescan sonar. Estuaries 2005, 28, 435–446. [Google Scholar] [CrossRef]
- Yeung, C.; McConnaughey, R.A. Using acoustic backscatter from a sidescan sonar to explain fish and invertebrate distributions: A case study in Bristol Bay, Alaska. ICES J. Mar. Sci. 2008, 65, 242–254. [Google Scholar] [CrossRef]
- Grządziel, A. Methodology of performing hydrographic survey of the underwater obstacles. Marit. Rev. 2006, 7–8, 29–46. (In Polish) [Google Scholar]
- Czechowska, K.; Feldens, P.; Tuya, F.; Cosme de Esteban, M.; Espino, F.; Haroun, R.; Schönke, M.; Otero-Ferrer, F. Testing Side-Scan Sonar and Multibeam Echosounder to Study Black Coral Gardens: A Case Study from Macaronesia. Remote Sens. 2020, 12, 3244. [Google Scholar] [CrossRef]
- Clarke, J.H.; Mayer, L.; Wells, D. Shallow-water imaging multibeam sonars: A new tool for investigating seafloor processes in the coastal zone and on the continental shelf. Mar. Geophys. Res. 1996, 18, 607–629. [Google Scholar] [CrossRef]
- Schrottke, K.; Becker, M.; Batholomä, A.; Flemming, B.W.; Hebbeln, D. Fluid mud dynamics in the Weser estuary turbidity zone tracked by high-resolution side-scan sonar and parametric sub-bottom profiler. Geo-Mar. Lett. 2006, 26, 185–198. [Google Scholar] [CrossRef]
- Schultz, J.J.; Healy, C.A.; Parker, K.; Lowers, B. Detecting submerged objects: The application of side scan sonar to forensic contexts. Forensic Sci. Int. 2013, 231, 306–316. [Google Scholar] [CrossRef]
- Buscombe, D.; Grams, P.E.; Smith, S.M.C. Automated Riverbed Sediment Classification Using Low-Cost Sidescan Sonar. J. Hydraul. Eng. 2016, 142, 06015019-1–06015019-7. [Google Scholar] [CrossRef]
- Geraga, M.; Papatheodorou, G.; Ferentinos, G.; Fakiris, E.; Christodoulou, D. The study of an ancient shipwreck using marine remote sensing techniques, in Kefalonia Island (Ionian Sea), Greece. Archaeol. Mariti. Mediterr. 2015, 12, 183–200. [Google Scholar]
- Wheeler, A.J. Environmental controls on Shipwreck preservation: The Irish context. J. Archaeol. Sci. 2002, 29, 1149–1159. [Google Scholar] [CrossRef]
- Fish, J.P.; Carr, H.A. Sound Underwater Images: A Guide to the Generation and Interpretation of Side Scan Sonar Data; Lower Cape Publishing Co.: Boston, MA, USA, 1990. [Google Scholar]
- Beltrame, C.; Gaddi, D. Report on the first research campaign on the Napoleonic brick, Mercure, wrecked off Lignano, Udine, Italy in 1812. Int. J. Naut. Archaeol. 2002, 31, 60–73. [Google Scholar] [CrossRef]
- Bates, C.R.; Lawrence, M.; Dean, M.; Robertson, P. Geophysical Methods for Wreck-Site Monitoring: The Rapid Archaeological Site Surveying and Evaluation (RASSE) programme. Int. J. Naut. Archaeol. 2011, 40, 404–416. [Google Scholar] [CrossRef]
- Blondel, P. The Handbook of Sidescan Sonar; Springer Science & Business Media: Chichester, UK, 2009. [Google Scholar]
- Headquarters, U.S. Army Corps of Engineers. “Hydrographic surveying,” Draft Engineer Manual; EM 1110-2-1003; US Army Corps of Engineers: Washington, DC, USA, 2002; p. 506.
- Mazel, C. Side Scan Sonar Training Manual; Klein Associates, Inc.: Salem, NH, USA, 1985. [Google Scholar]
- Quinn, R.; Dean, M.; Lawrence, M.; Liscoe, S.; Boland, D. Backscatter responses and resolution considerations in archaeological side-scan sonar surveys: A control experiment. J. Archaeol. Sci. 2005, 32, 1252–1264. [Google Scholar] [CrossRef]
- Kvitek, R.; Iampietro, P.; Sandoval, E.; Castleton, M.; Bretz, C.; Manouki, T.; Green, A. Early Implementation of Nearshore Ecosystem Database Project; SIVA Resource Center: Monterey Bay, CA, USA, 1999; 131p. [Google Scholar]
- Penrose, J.D.; Siwabessy, P.J.W.; Gavrilov, A.; Parnum, I.; Hamilton, L.J.; Bickers, A.; Brooke, B.; Ryan, D.A.; Kennedy, P. Acoustic Techniques for Seabed Classification; Technical Report 32; Cooperative Research Centre for Coastal Zone Estuary and Waterway Management: Indooroopilly, Australia, 2005. [Google Scholar]
- Kenny, A.J.; Todd, B.J.; Cooke, R. Procedural Guideline No. 1–4. The application of sidescan sonar for seabed habitat mapping. In Marine Monitoring Handbook; JNCC: Peterborough, UK, 2001; ISBN 1-86107-5243. [Google Scholar]
- Bai, Y.; Bai, Q. Subsea Engineering Handbook, 2nd ed.; Gulf Professional Publishing: Waltham, MA, USA, 2012; ISBN 9780128126226. [Google Scholar] [CrossRef]
- Dondurur, D. Acquisition and Processing of Marine Seismic Data; Elsevier: Amsterdam, The Netherlands, 2018; ISBN 9780128114902. [Google Scholar] [CrossRef]
- Bennell, J.D. Procedural Guideline No. 1–5 Mosaicking of sidescan sonar images to map seabed features. In Marine Monitoring Handbook; JNCC: Peterborough, UK, 2001; ISBN 1-86107-5243. [Google Scholar]
- Manual on Hydrography, 1st ed.; Publication M-13; International Hydrographic Organization: Monaco, 2005; p. 202.
- Breyer, S. Graf Zeppelin: The German Aircraft Carrier; Schiffer Pub: West Chester, UK, 1989. [Google Scholar]
- Breyer, S. Graf Zeppelin: Encyklopedia Okrętów Wojennych (42); Wyd. AJ-Press: Gdańsk, Poland, 2004. [Google Scholar]
- Federowicz, P. Lotniskowiec Graf Zeppelin cz. II. Okręty Wojenne 2002, 54, 36. (In Polish) [Google Scholar]
- Dramiński, S. The German Aircraft Carrier Graf Zeppelin; Publisher Kagero: Lublin, Poland, 2016. [Google Scholar]
- Burke, S.; Olejnik, A. Freedom of the Seas: The Story of Hitler’s Aircraft Carrier—Graf Zeppelin; Stephen Burke Books: Warrington, UK, 2010; Print. [Google Scholar]
- Von der Porten, E.P. The German Navy in World War II; Ballantine Books: New York, NY, USA, 1977. [Google Scholar]
- Murawski, M.J. Lotniskowiec Graf Zeppelin i jego samoloty pokładowe. Wojsko Tech. Hist. 2017, 3, 56–70. (In Polish) [Google Scholar]
- Jackson, R. Battle of the Baltic: The Wars 1918–1945, 1st ed.; Pen and Sword: Barnsley, UK, 2007; ISBN 10:184415422X. [Google Scholar]
- Doneus, M.; Doneus, N.; Briese, C.; Pregesbauer, M.; Mandlburger, G.; Verhoeven, G. Airborne laser bathymetry—Detecting and recording submerged archaeological sites from the air. J. Archaeol. Sci. 2013, 40, 2136–2151. [Google Scholar] [CrossRef]
- Pøhner, F. Multibeam sonars for mapping the seabed with the HUGIN UUV. In Proceedings of the 17th Symposium on Hydroacoustics, Jurata, Poland, 23–26 May 2000; Volume 3, pp. 7–13. [Google Scholar]
- ATLAS DESO 25. Survey Echosounder. Operating Instructions; STN ATLAS Electronic GmbH Marine Division: Bremen, Germany, 1996; ED 1013 G 012.
- Kongsberg, S.A. EA 400 Hydrography Echo Sounder; Instruction Manual: Horten, Norway, 2003. [Google Scholar]
- Atallah, L.; Shang, C.; Bates, R. Object detection at different resolution in archaeological side-scan sonar images. Eur. Ocean. 2005, 1, 287–292. [Google Scholar] [CrossRef]
- Burguera, A.; Oliver, G. High-Resolution Underwater Mapping Using Side-Scan Sonar. PLoS ONE 2016, 11, e0146396. [Google Scholar] [CrossRef]
- Łukaszewicz, D.; Rowiński, L. Experimental evaluation of high frequency side scan sonar as object search and identification tool. Hydroacoustics 2006, 9, 109–118. [Google Scholar]
- Lekkerkerk, H.-J.; Theijs, M.J. Handbook of Offshore Surveying. Acquisition Sensors, 2nd ed.; Skilltrade BV: Voorschoten, The Netherlands, 2012. [Google Scholar]
- Łukaszewicz, D.; Rowiński, L. Possibilities of detection and identification objects located on the sea bottom by means of a simple sidescan sonar. Hydroacoustics 2005, 8, 111–116. [Google Scholar]
- Model DF-1000 Digital Side Scan Sonar Tow Fish; Instruction Manual, EdgeTech: West Wareham, MA, USA, 2003.
- Sonar for Harbour Surveillance and Intruder Detection; Kongsberg Mesotech Ltd.: Port Coquitlam, BC, Canada, 2006; p. 7.
- Kongsberg Mesotech Ltd. MS 1000 High-Resolution Scanning Sonar & Software System for Underwater Inspection, Survey and Visualization 2013. Available online: https://escort-technology.com/wp-content/uploads/ms1000_iusv_bro_6pages_lr.pdf (accessed on 13 August 2020).
- Topczewski, Ł.; Cieśla, J.; Mikołajewski, P.; Adamski, P.; Markowski, Z. Monitoring of scour around bridge piers and abutments. Transp. Res. Procedia 2016, 14, 3963–3971. [Google Scholar] [CrossRef]
- Wawrzyniak, N.; Zaniewicz, G. Visualization of quay walls by means of scanning sonar images for the needs of a geoinformation port security system. Rocz. Geomatyki 2011, 2, 133–137. (In Polish) [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grazing Angle β | 80° | 70° | 60° | 50° | 40° | 30° | 20° | 10° |
|---|---|---|---|---|---|---|---|---|
| Ry [m] | 6.48 | 3.29 | 2.25 | 1.75 | 1.47 | 1.30 | 1.20 | 1.14 |
| Grazing Angle β | 80° | 70° | 60° | 50° | 40° | 30° | 20° | 10° |
|---|---|---|---|---|---|---|---|---|
| Ry [m] for 100 kHz | 0.43 | 0.22 | 0.15 | 0.12 | 0.10 | 0.09 | 0.08 | 0.08 |
| Ry [m] for 500 kHz | 0.04 | 0.02 | 0.02 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
| Distance D | 10 m | 30 m | 50 m | 60 m | 70 m | 80 m | 100 m | 130 m | 150 m |
|---|---|---|---|---|---|---|---|---|---|
| Rx [m] for 100 kHz | 0.21 | 0.63 | 1.05 | 1.26 | 1.47 | 1.68 | 2.09 | 2.72 | 3.14 |
| Rx [m] for 500 kHz | 0.09 | 0.26 | 0.44 | 0.52 | 0.61 | 0.70 | 0.87 | 1.13 | 1.31 |
| Distance D | 10 m | 30 m | 50 m | 60 m | 70 m | 80 m | 100 m | 130 m | 150 m |
|---|---|---|---|---|---|---|---|---|---|
| Rx [m] for 100 kHz | 0.22 | 0.44 | 1.09 | 1.31 | 1.53 | 1.75 | 2.18 | 284 | 3.27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grządziel, A. Using Remote Sensing Techniques to Document and Identify the Largest Underwater Object of the Baltic Sea: Case Study of the Only German Aircraft Carrier, Graf Zeppelin. Remote Sens. 2020, 12, 4076. https://doi.org/10.3390/rs12244076
Grządziel A. Using Remote Sensing Techniques to Document and Identify the Largest Underwater Object of the Baltic Sea: Case Study of the Only German Aircraft Carrier, Graf Zeppelin. Remote Sensing. 2020; 12(24):4076. https://doi.org/10.3390/rs12244076
Chicago/Turabian StyleGrządziel, Artur. 2020. "Using Remote Sensing Techniques to Document and Identify the Largest Underwater Object of the Baltic Sea: Case Study of the Only German Aircraft Carrier, Graf Zeppelin" Remote Sensing 12, no. 24: 4076. https://doi.org/10.3390/rs12244076
APA StyleGrządziel, A. (2020). Using Remote Sensing Techniques to Document and Identify the Largest Underwater Object of the Baltic Sea: Case Study of the Only German Aircraft Carrier, Graf Zeppelin. Remote Sensing, 12(24), 4076. https://doi.org/10.3390/rs12244076