A Novel Post-Doppler Parametric Adaptive Matched Filter for Airborne Multichannel Radar

 ,
,  , ,
, ,
Abstract
1. Introduction
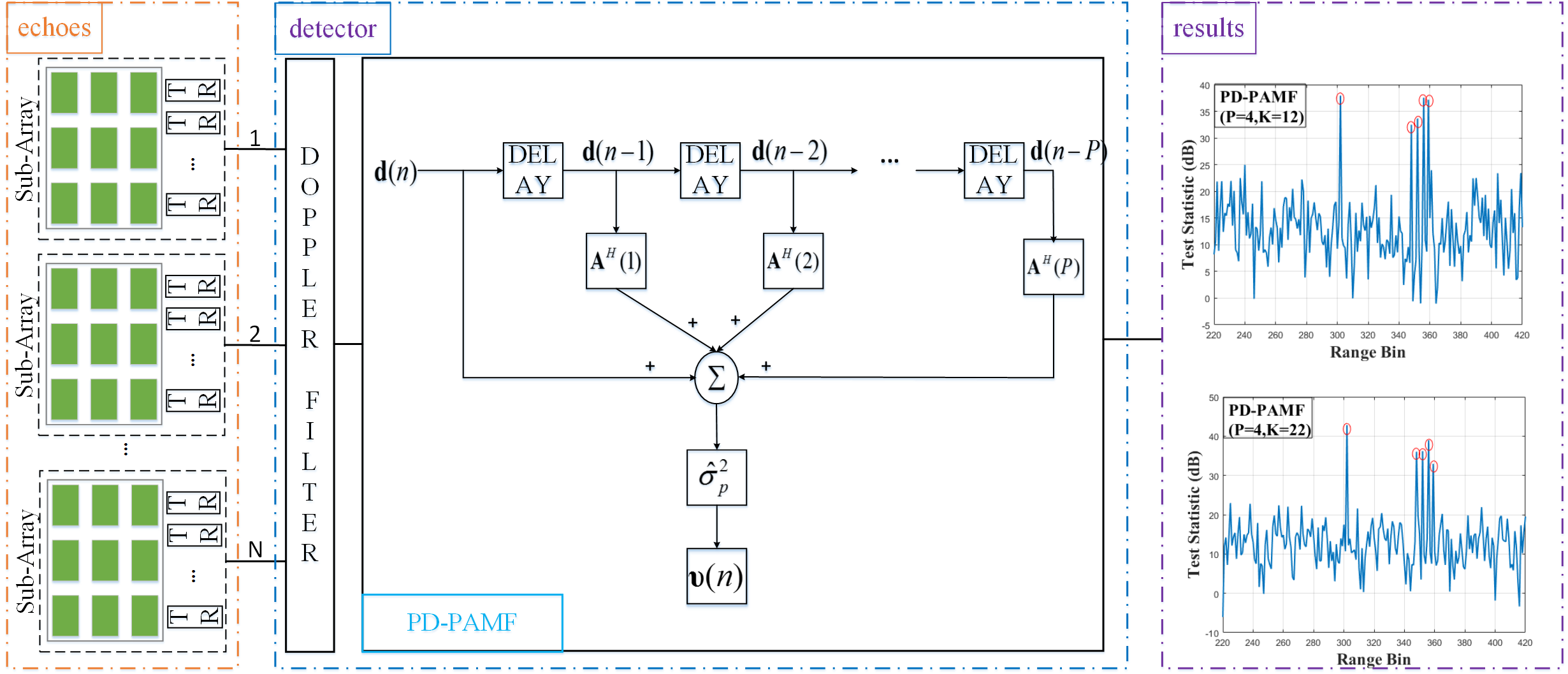
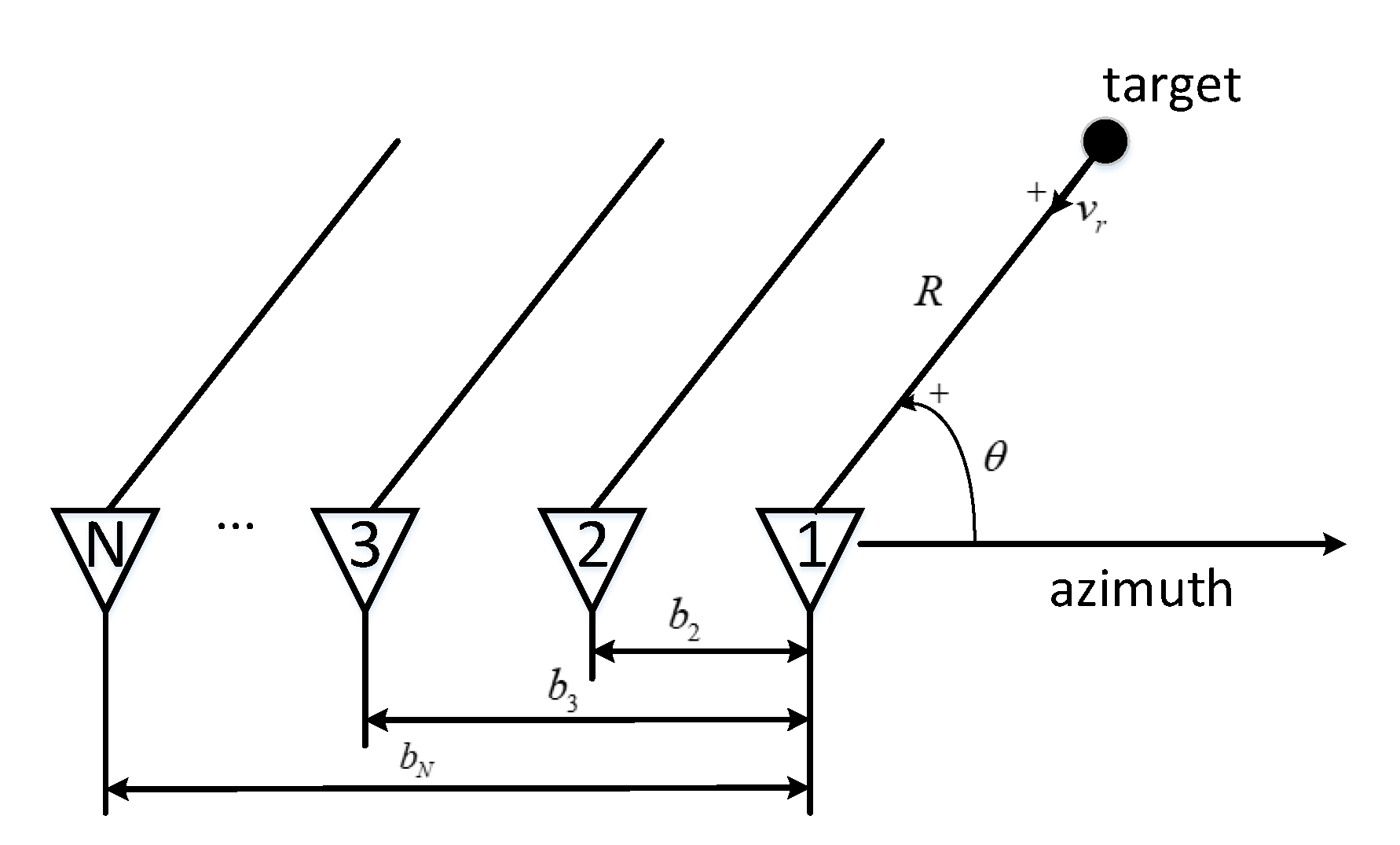
2. Multichannel Signal Model and PD-STAP Overview
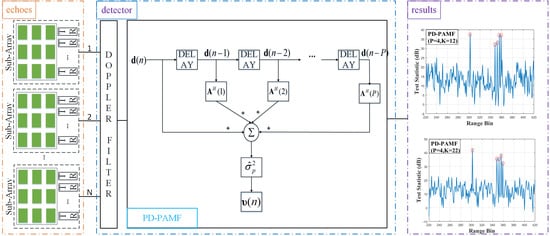
3. Post-Doppler Parametric Matched Filter
3.1. Modified Multichannel Signal Model
3.2. Post-Doppler Parametric Matched Filter Derivation
4. Post-Doppler Parametric Adaptive Matched Filter
4.1. Post-Doppler Parametric Adaptive Matched Filter Derivation
4.2. Computational Complexity
5. Numerical Evaluation
5.1. Theoretical Performance
5.1.1. Receiver Operating Characteristic (ROC) Curves
5.1.2. Probability of Detection versus SINR
5.1.3. Root Mean Square Error (RMSE) of Velocity versus SINR
5.1.4. Computational Complexity versus Channels
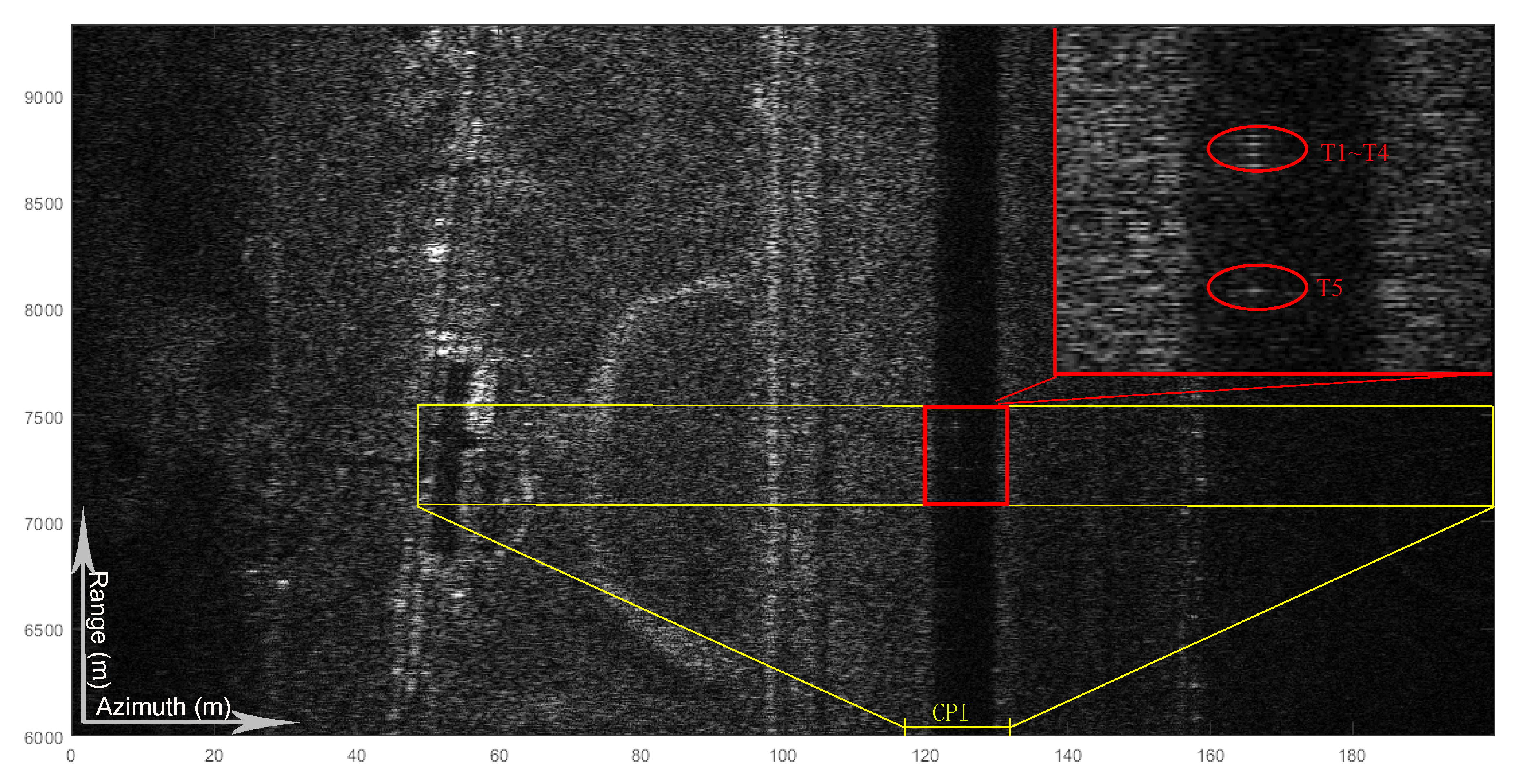
5.2. Detection Performance Using Simulated Airborne Multichannel Radar Data
5.2.1. First Test Case
5.2.2. Second Test Case
5.2.3. Third Test Case
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of open access journals |
| TLA | Three letter acronym |
| LD | linear dichroism |
References
- Brennan, L.E.; Reed, L. Theory of adaptive radar. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9, 237–252. [Google Scholar] [CrossRef]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid convergence rate in adaptive arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, 6, 853–863. [Google Scholar] [CrossRef]
- Kelly, E.J. An adaptive detection algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 115–127. [Google Scholar] [CrossRef]
- Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar]
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; IEE Colloquium on Space-Time Adaptive Processing: London, UK, 1998. [Google Scholar]
- Wang, H.; Cai, L. On adaptive spatial-temporal processing for airborne surveillance radar systems. IEEE Aerosp. Electron. Syst. 1994, 30, 660–670. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Klare, J.; Brenner, A.R.; Ender, J.H. Wide-area traffic monitoring with the SAR/GMTI system PAMIR. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3019–3030. [Google Scholar] [CrossRef]
- Da Silva, A.B.C.; Baumgartner, S.V.; Krieger, G. Training data selection and update strategies for airborne post-doppler stap. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5626–5641. [Google Scholar] [CrossRef]
- Ender, J.H. Space-time processing for multichannel synthetic aperture radar. Electron. Commun. Eng. J. 1999, 11, 29–38. [Google Scholar] [CrossRef]
- Gelli, S.; Bacci, A.; Giusti, E.; Martorella, M.; Berizzi, F. Effectiveness of Knowledge-Based STAP in Ground Targets Detection with Real Dataset. In Proceedings of the International Conference on Radar Systems (Radar 2017), Belfast, UK, 23—26 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Rangaswamy, M.; Michels, J.H. A parametric multichannel detection algorithm for correlated non-Gaussian random processes. In Proceedings of the 1997 IEEE National Radar Conference, Syracuse, NY, USA, 13–15 May 1997; pp. 349–354. [Google Scholar]
- Roman, J.R.; Rangaswamy, M.; Davis, D.W.; Zhang, Q.; Himed, B.; Michels, J.H. Parametric adaptive matched filter for airborne radar applications. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 677–692. [Google Scholar] [CrossRef]
- Sohn, K.J.; Li, H.; Himed, B. Parametric Rao test for multichannel adaptive signal detection. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 921–933. [Google Scholar] [CrossRef]
- Wang, P.; Li, H.; Himed, B. A new parametric GLRT for multichannel adaptive signal detection. IEEE Trans. Signal Process. 2010, 58, 317–325. [Google Scholar] [CrossRef]
- Sohn, K.J.; Li, H.; Himed, B. Parametric GLRT for multichannel adaptive signal detection. IEEE Trans. Signal Process. 2007, 55, 5351–5360. [Google Scholar] [CrossRef]
- Li, H.; Sohn, K.J.; Himed, B. The PAMF Detector is a Parametric Rao Test. In Proceedings of the Conference Record of the Thirty-Ninth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 30 October–2 November 2005; pp. 1311–1315. [Google Scholar] [CrossRef]
- Chen, C.W. Performance assessment of along-track interferometry for detecting ground moving targets. In Proceedings of the 2004 IEEE Radar Conference (IEEE Cat. No.04CH37509), Philadelphia, PA, USA, 29 April 2004; pp. 99–104. [Google Scholar] [CrossRef]
- Michels, J.H.; Himed, B.; Rangaswamy, M. Robust STAP detection in a dense signal airborne radar environment. Signal Process. 2004, 84, 1625–1636. [Google Scholar] [CrossRef]
- Alfano, G.; De Maio, A.; Farina, A. Model-based adaptive detection of range-spread targets. IEEE Proc. Radar Sonar Navig. 2004, 151, 2–10. [Google Scholar] [CrossRef]
- Melvin, W.L. A stap overview. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 19–35. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Sikaneta, I. A generalization of DPCA processing for multichannel SAR/GMTI radars. IEEE Trans. Geosci. Remote Sens. 2012, 51, 560–572. [Google Scholar] [CrossRef]
- Kirk, J. Motion Compensation for Synthetic Aperture Radar. IEEE Trans. Aerosp. Electron. Syst. 1975, AES-11, 338–348. [Google Scholar] [CrossRef]
- Zeng, L.; Liang, Y.; Xing, M.; Huai, Y.; Li, Z. A Novel Motion Compensation Approach for Airborne Spotlight SAR of High-Resolution and High-Squint Mode. IEEE Geosci. Remote Sens. Lett. 2016, 13, 429–433. [Google Scholar] [CrossRef]
- Da Silva, A.B.C.; Baumgartner, S.V.; de Almeida, F.Q.; Krieger, G. In-Flight Multichannel Calibration for Along-Track Interferometric Airborne Radar. IEEE Trans. Geosci. Remote. Sens. 2020, 1–18. [Google Scholar] [CrossRef]
- Gierull, C.H. Moving Target Detection with Along-Track SAR Interferometry; Technical Report 2002-084; Technical memorandum; Defence R & D Canada-Ottawa: Ottawa, ON, Canada, 2002. [Google Scholar]
- Gierull, C.; Ottawa, D.R.D.C. Digital Channel Balancing of Along-Track Interferometric SAR Data; Technical memorandum; Defence R & D Canada-Ottawa: Ottawa, ON, Canada, 2003. [Google Scholar]
- Therrien, C. On the relation between triangular matrix decomposition and linear prediction. Proc. IEEE 1983, 71, 1459–1460. [Google Scholar] [CrossRef]
- Haykin, S. Adaptive Radar Detection and Estimation; WILEY-INTERSCIENCE: Hoboken, NJ, USA, 1992. [Google Scholar]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Rissanen, J. Modeling by shortest data description. Automatica 1978, 14, 465–471. [Google Scholar] [CrossRef]
- Marple, S.L., Jr.; Carey, W.M. Digital Spectral Analysis with Applications. J. Acounsti. Soc. Am. 1989, 86, 2043. [Google Scholar] [CrossRef]
- Michels, J.; Himed, B.; Rangaswamy, M. Evaluation of the normalized parametric adaptive matched filter STAP test in airborne radar clutter. In Proceedings of the Record of the IEEE 2000 International Radar Conference [Cat. No. 00CH37037], Alexandria, VA, USA, 12 May 2000; pp. 769–774. [Google Scholar] [CrossRef]
- Michels, J.H.; Rangaswamy, M.; Himed, B. Performance of parametric and covariance based STAP tests in compound-Gaussian clutter. Digit. Signal Process. 2002, 12, 307–328. [Google Scholar] [CrossRef]
- Wang, P.; Li, H.; Himed, B. A parametric moving target detector for distributed MIMO radar in non-homogeneous environment. IEEE Trans. Signal Process. 2013, 61, 2282–2294. [Google Scholar] [CrossRef]
- Ender, J.H.; Gierull, C.H.; Cerutti-Maori, D. Improved space-based moving target indication via alternate transmission and receiver switching. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3960–3974. [Google Scholar] [CrossRef]
- Allan, J.M.; Collins, M.J.; Gierull, C. Computational synthetic aperture radar (cSAR): A flexible signal simulator for multichannel SAR systems. Can. J. Remote Sens. 2010, 36, 345–360. [Google Scholar] [CrossRef]
- Barbarossa, S.; Farina, A. Detection and imaging of moving objects with synthetic aperture radar. 2. Joint time-frequency analysis by Wigner-Ville distribution. Radar Signal Process. IEEE Proc. F 1992, 139, 79–88. [Google Scholar] [CrossRef]
- Cristallini, D.; Pastina, D.; Colone, F.; Lombardo, P. Efficient Detection and Imaging of Moving Targets in SAR Images Based on Chirp Scaling. IEEE Trans. Geoence Remote Sens. 2013, 51, 2403–2416. [Google Scholar] [CrossRef]
- Pu, W.; Wang, X.; Wu, J.; Huang, Y.; Yang, J. Video SAR Imaging Based on Low-Rank Tensor Recovery. IEEE Trans. Neural Networks Learn. Syst. 2020, 1–15. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Variables | Values |
|---|---|---|
| Wavelength | 0.03 m | |
| Platform velocity | V | 100 m/s |
| Number of channels | N | 11 |
| Antenna separation | b | 0.1 m |
| Target direction of arrival | 90 | |
| Target radial velocity | 1 m/s | |
| Pulse repetition frequency | PRF | 1000 Hz |
| Clutter to noise ratio | CNR | 10 dB |
| Parameters | Variables | Values |
|---|---|---|
| Scene dimensions | Na × Nr | 2000 × 800 |
| Wavelength | 0.03 m | |
| Platform velocity | V | 100 m/s |
| Number of channels | N | 11 |
| Antenna separation | b | 0.1 m |
| Target direction of arrival | 90 | |
| Target radial velocity | 2 m/s | |
| Pulse repetition frequency | PRF | 1000 Hz |
| Platform Height | Ha | 3000 m |
| Minimum slant range | Rmin | 6000 m |
| Bandwidth | Br | 30 MHz |
| Clutter to noise ratio | CNR | 30 dB |
| Signal to clutter ratio | SCR | 2 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.; Wang, B.; Xiang, M.; Wang, Z.; Xu, W.; Sun, X. A Novel Post-Doppler Parametric Adaptive Matched Filter for Airborne Multichannel Radar. Remote Sens. 2020, 12, 4017. https://doi.org/10.3390/rs12244017
Song C, Wang B, Xiang M, Wang Z, Xu W, Sun X. A Novel Post-Doppler Parametric Adaptive Matched Filter for Airborne Multichannel Radar. Remote Sensing. 2020; 12(24):4017. https://doi.org/10.3390/rs12244017
Chicago/Turabian StyleSong, Chong, Bingnan Wang, Maosheng Xiang, Zhongbin Wang, Weidi Xu, and Xiaofan Sun. 2020. "A Novel Post-Doppler Parametric Adaptive Matched Filter for Airborne Multichannel Radar" Remote Sensing 12, no. 24: 4017. https://doi.org/10.3390/rs12244017
APA StyleSong, C., Wang, B., Xiang, M., Wang, Z., Xu, W., & Sun, X. (2020). A Novel Post-Doppler Parametric Adaptive Matched Filter for Airborne Multichannel Radar. Remote Sensing, 12(24), 4017. https://doi.org/10.3390/rs12244017