InSAR 3-D Coseismic Displacement Field of the 2015 Mw 7.8 Nepal Earthquake: Insights into Complex Fault Kinematics during the Event

 , ,
, ,
Abstract
1. Introduction
2. Data and Methods
2.1. InSAR Data and Interferogram Processing Methods
2.2. Coseismic Slip Distribution Inversion Method
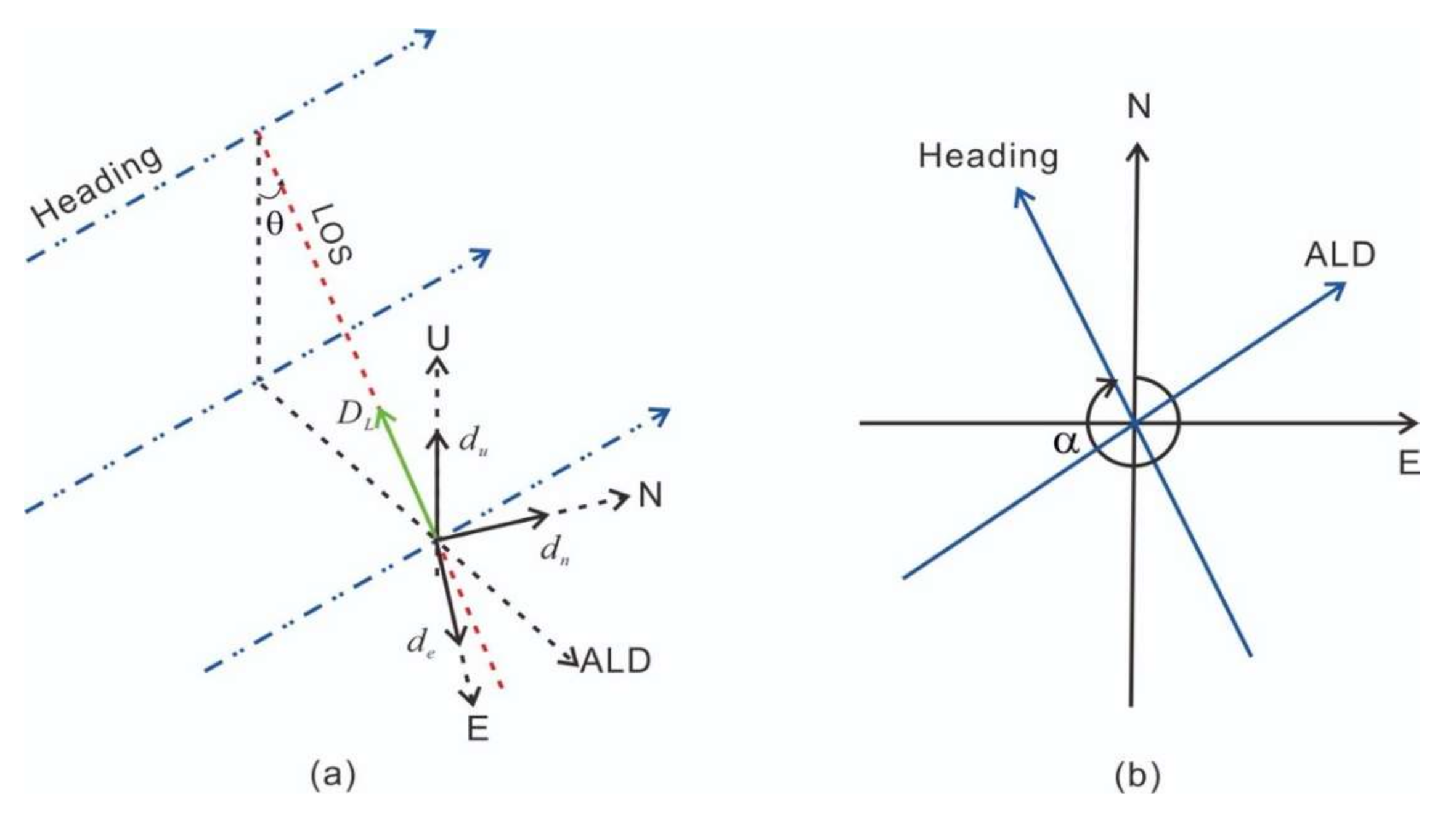
2.3. 3-D Displacement Decomposing Methodology
3. Results
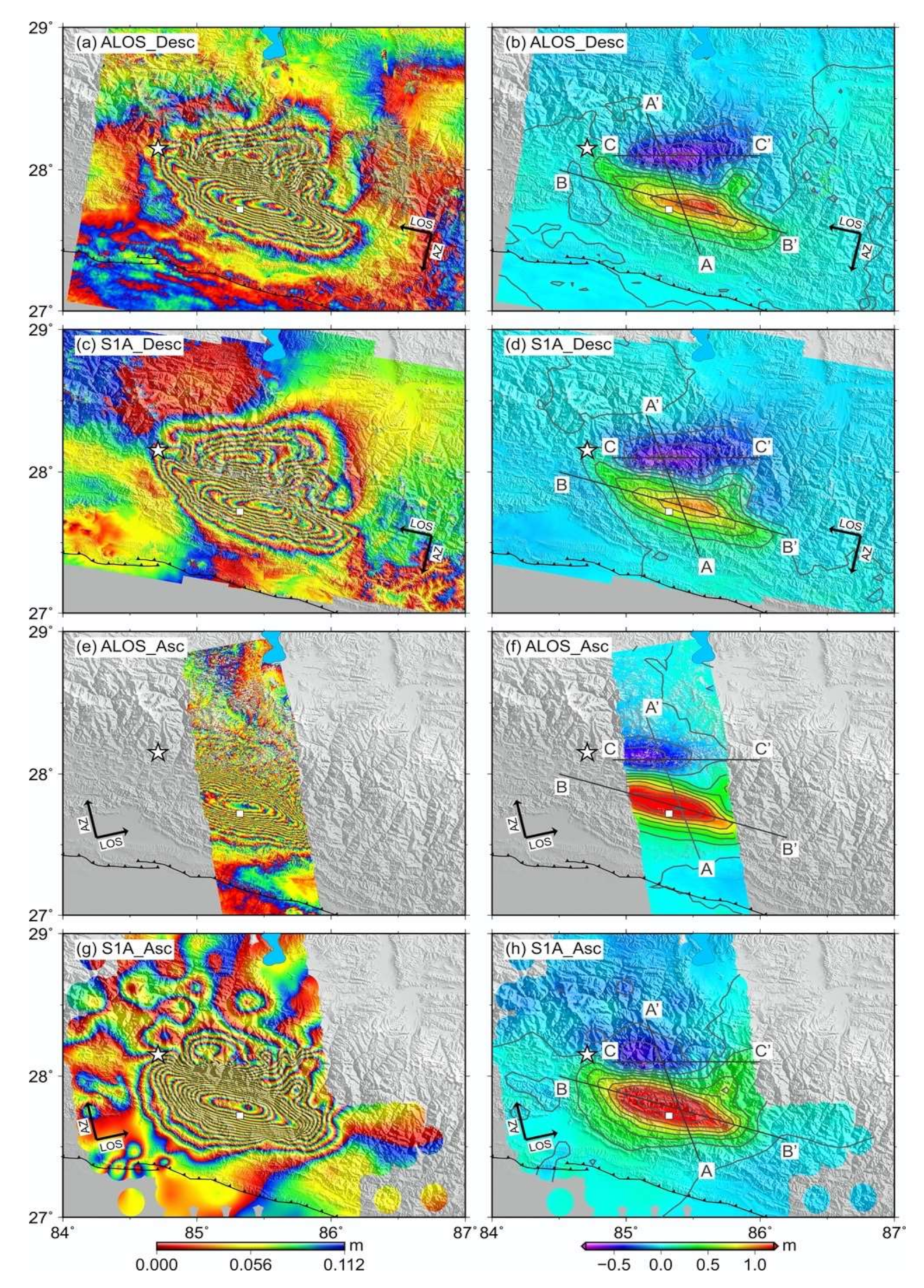
3.1. Coseismic Deformation Fields Acquired from Multi-Source InSAR Data
3.2. Comparative Analysis of Slip Distribution Inversion Results
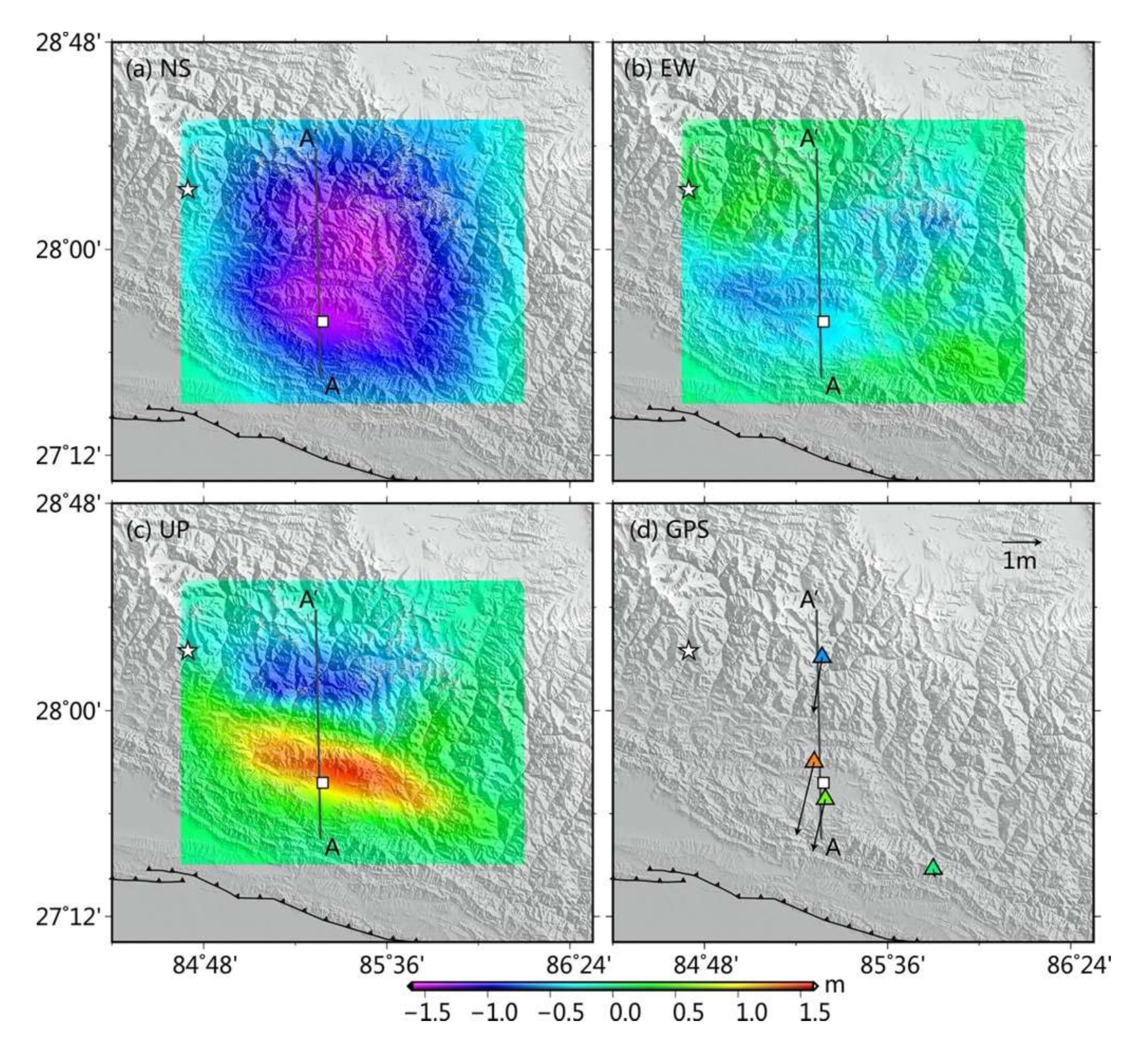
3.3. Analysis of 3-D Deformation Field
4. Discussion
4.1. Comparison of 3-D Deformation Fields and GPS Data
4.2. Significance of the 3-D Deformation Field and Characteristics of Fault Motion
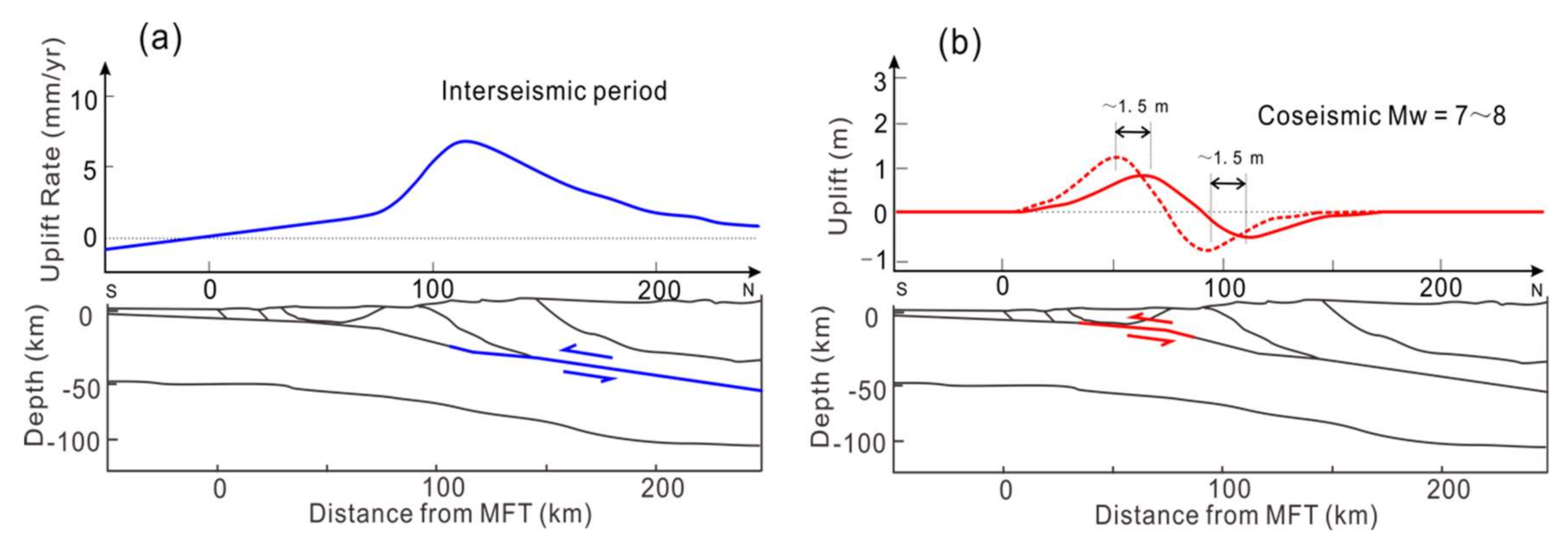
4.3. Large-Scale Low-Angle Thrust Earthquakes and Associated Lateral Extrusion and Tension
4.4. Applicability of Different 3-D Deformation Solutions to Earthquakes with a Large North–South Component
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Elliott, J.R.; Jolivet, R.; González, P.J.; Avouac, J.P.; Hollingsworth, J.; Searle, M.P.; Stevens, V.L. Himalayan megathrust geometry and relation to topography revealed by the Gorkha earthquake. Nat. Geosci. 2016, 9, 174–180. [Google Scholar] [CrossRef]
- Whipple, K.X.; Shirzaei, M.; Hodges, K.V.; Arrowsmith, J.R. Active shortening within the Himalayan orogenic wedge implied by the 2015 Gorkha earthquake. Nat. Geosci. 2016, 9, 711–716. [Google Scholar] [CrossRef]
- Ader, T.; Avouac, J.-P.; Liu-Zeng, J.; Lyon-Caen, H.; Bollinger, L.; Galetzka, J.; Genrich, J.; Thomas, M.; Chanard, K.; Sapkota, S.N.; et al. Convergence rate across the Nepal Himalaya and interseismic coupling on the Main Himalayan Thrust: Implications for seismic hazard. J. Geophys. Res. Solid Earth 2012, 117, B04403. [Google Scholar] [CrossRef]
- Bilham, R.; Larson, K.; Freymueller, J. GPS measurements of present-day convergence across the Nepal Himalaya. Nature 1997, 386, 61–64. [Google Scholar] [CrossRef]
- Liu, J.; Ji, C.; Zhang, J.Y.; Zhang, J.Y.; Zhang, P.Z.; Zeng, L.S.; Li, Z.F.; Wang, W. Tectonic setting and general features of coseismic rupture of the 25 April, 2015 Mw 7.8 Gorkha, Nepal earthquake. China Sci. Bull. 2015, 60, 2640–2655. (In Chinese) [Google Scholar] [CrossRef]
- Feng, G.; Li, Z.; Shan, X.; Zhang, L.; Zhang, G.; Zhu, J. Geodetic model of the 2015 April 25 Mw 7.8 Gorkha Nepal Earthquake and Mw 7.3 aftershock estimated from InSAR and GPS data. Geophys. J. Int. 2015, 203, 896–900. [Google Scholar] [CrossRef]
- Sapkota, S.N.; Bollinger, L.; Klinger, Y.; Tapponnier, P.; Gaudemer, Y.; Tiwari, D. Primary surface ruptures of the great Himalayan earthquakes in 1934 and 1255. Nat. Geosci. 2013, 6, 71–76. [Google Scholar] [CrossRef]
- Shan, X.J.; Zhang, G.H.; Wang, C.S.; Li, Y.C.; Qu, C.Y.; Song, X.G.; Yu, L.; Liu, Y.H. Joint inversion for the spatial fault slip distribution of the 2015 Nepal Mw 7.9 earthquake based on InSAR and GPS observations. Chinese J. Geophys. 2015, 58, 4266–4276. (In Chinese) [Google Scholar] [CrossRef]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. GAMMA SAR and interferometric processing software. In Proceedings of the ERS-Envisat Symposium, Gothenburg, Sweden, 16–20 October 2000. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–380. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Werner, C.L. Radar Interferogram Filtering for Geophysical Applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef]
- Costantini, M. A novel phase unwrapping method based on network programming. IEEE Trans. Geosci. Remote Sens. 1998, 36, 813–821. [Google Scholar] [CrossRef]
- Grandin, R.; Vallée, M.; Satriano, C.; Lacassin, R.; Klinger, Y.; Simoes, M.; Bollinger, L. Rupture process of the Mw = 7.9 2015 Gorkha earthquake (Nepal): Insights into Himalayan megathrust segmentation. Geophys. Res. Lett. 2015, 42, 8373–8382. [Google Scholar] [CrossRef]
- Wang, K.; Fialko, Y. Slip model of the 2015 Mw 7.8 Gorkha (Nepal) earthquake from inversions of ALOS-2 and GPS data. Geophys. Res. Lett. 2015, 42, 7452–7458. [Google Scholar] [CrossRef]
- Lindsey, E.O.; Natsuaki, R.; Xu, X.; Shimada, M.; Hashimoto, M.; Melgar, D.; Sandwell, D.T. Line-of-sight displacement from ALOS-2 interferometry: Mw 7.8 Gorkha Earthquake and Mw 7.3 aftershock. Geophys. Res. Lett. 2015, 42, 6655–6661. [Google Scholar] [CrossRef]
- Li, Y.S.; Shen, W.H.; Wen, Y.M.; Zhang, J.; Li, Z.; Jiang, W.; Luo, Y. Source parameters for the 2015 Nepal Earthquake revealed by InSAR observations and strong ground motion simulation. Chin. J. Geophys. 2016, 59, 1359–1370. (In Chinese) [Google Scholar] [CrossRef]
- Wen, S.; Shan, X.; Zhang, Y.; Wang, J.; Zhang, G.; Qu, C.; Xu, X. Three-dimensional coseismic deformation acquisition and source characteristics analysis of Qaidam earthquake based on InSAR. Chin. J. Geophs. 2016, 59, 912–921. (In Chinese) [Google Scholar]
- Wright, T.J.; Parsons, B.E.; Lu, Z. Toward mapping surface deformation in three dimensions using InSAR. Geophys. Res. Lett. 2004, 31, L01607. [Google Scholar] [CrossRef]
- Fialko, Y.; Sandwell, D.; Simons, M.; Rosen, P. Three dimensional Deformation caused by the BAM, Iran, earthquake and the origin of shallow slip deficit. Nature 2005, 435, 295–299. [Google Scholar] [CrossRef]
- Wang, H.; Ge, L.; Xu, C.J.; Du, Z. 3-D coseismic displacement Field of the 2005 Kashmir earthquake inferred from satellite radar imagery. Earth Planet. Space 2007, 59, 343–349. [Google Scholar] [CrossRef]
- Bechor, N.B.D.; Zebker, H.A. Measuring two-dimensional movements using a single InSAR pair. Geophys. Res. Lett. 2006, 33, L16311. [Google Scholar] [CrossRef]
- Sun, J.B.; Liang, F.; Xu, X.W.; Gong, P. 3-D co-seismic deformation field of the Bam Earthquake (Mw 6.5) from ascending and descending pass ASAR radar interferometry. J. Remote Sens. 2006, 10, 489–496. (In Chinese) [Google Scholar]
- Su, X.N.; Wang, Z.; Meng, G.J.; Xu, W.Z.; Ren, J.W. Pre-seismic strain accumulation and co-seismic deformation of the 2015 Nepal Ms 8.1 earthquake observed by GPS. China Sci. Bull. 2015, 60, 2115–2123. (In Chinese) [Google Scholar] [CrossRef]
- Avouac, J.P. Mountain building: From earthquakes to geological deformation. Dynamic processes in extensional and compressional settings. Treatise Geophys. 2015, 6, 377–439. [Google Scholar]
- Zheng, G.; Wang, H.; Wright, T.J.; Lou, Y.; Zhang, R.; Zhang, W.; Shi, C.; Huang, J.; Wei, N. Crustal deformation in the India-Eurasia collision zone from 25 years of GPS measurements. J. Geophys. Res. Solid Earth 2017, 122, 9290–9312. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Track and Orbit Type | Image Mode | Incidence Angle (deg) | Heading (deg) | Reference Image Acquisition Date | Secondary Image Acquisition Date | Perpendicular Baseline (m) |
|---|---|---|---|---|---|---|---|
| S1A | T19 Descending | TOPS | 31.3~46.5 | −167.45 | 17 April 2015 | 29 April 2015 | 37.7 |
| 38.6 | |||||||
| T21 Descending | 12 April 2015 | 06 May 2015 | 154.0 | ||||
| 24 April 2015 | 06 May 2015 | 224.3 | |||||
| S1A | T85 Ascending | TOPS | 31.3~46.5 | −12.52 | 09 April 2015 | 03 May 2015 | −203.3 |
| ALOS-2 | T048 Descending | ScanSAR | 26.8~49.7 | −169.95 | 05 April 2015 | 03 May 2015 | 4.3 |
| ALOS-2 | T157 Ascending | Swath | 29.2~34.0 | −10.87 | 21 Tuesday 2015 | 02 May 2015 | −118.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, C.; Qiao, X.; Shan, X.; Zhao, D.; Zhao, L.; Gong, W.; Li, Y. InSAR 3-D Coseismic Displacement Field of the 2015 Mw 7.8 Nepal Earthquake: Insights into Complex Fault Kinematics during the Event. Remote Sens. 2020, 12, 3982. https://doi.org/10.3390/rs12233982
Qu C, Qiao X, Shan X, Zhao D, Zhao L, Gong W, Li Y. InSAR 3-D Coseismic Displacement Field of the 2015 Mw 7.8 Nepal Earthquake: Insights into Complex Fault Kinematics during the Event. Remote Sensing. 2020; 12(23):3982. https://doi.org/10.3390/rs12233982
Chicago/Turabian StyleQu, Chunyan, Xin Qiao, Xinjian Shan, Dezheng Zhao, Lei Zhao, Wenyu Gong, and Yanchuan Li. 2020. "InSAR 3-D Coseismic Displacement Field of the 2015 Mw 7.8 Nepal Earthquake: Insights into Complex Fault Kinematics during the Event" Remote Sensing 12, no. 23: 3982. https://doi.org/10.3390/rs12233982
APA StyleQu, C., Qiao, X., Shan, X., Zhao, D., Zhao, L., Gong, W., & Li, Y. (2020). InSAR 3-D Coseismic Displacement Field of the 2015 Mw 7.8 Nepal Earthquake: Insights into Complex Fault Kinematics during the Event. Remote Sensing, 12(23), 3982. https://doi.org/10.3390/rs12233982