Applying the Tropical Peatland Combustion Algorithm to Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) Imagery

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Data
2.1. Landsat-8 and Sentinel-2A/B
2.2. Study Area and Data Acquisition Period
3. Methods
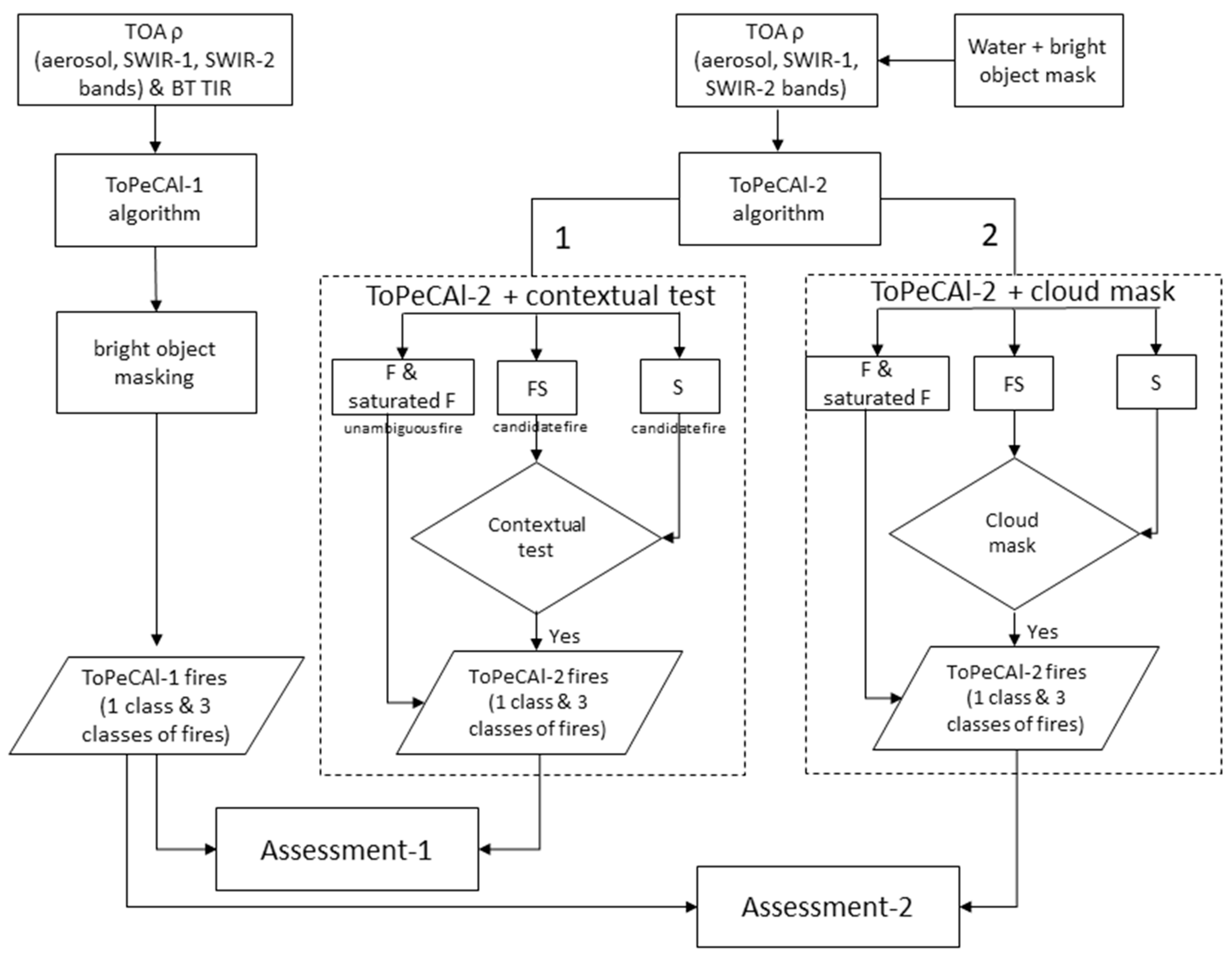
3.1. Tropical Peatland Combustion Algorithm with Shortwave Infrared (SWIR) and Thermal Infrared (TIR)
3.2. Tropical Peatland Combustion Algorithm without TIR (ToPeCAl-2)
- Pre-processing for water body and permanent bright objects masking,
- An alternative variation to ToPeCAl-2 using cloud masking.
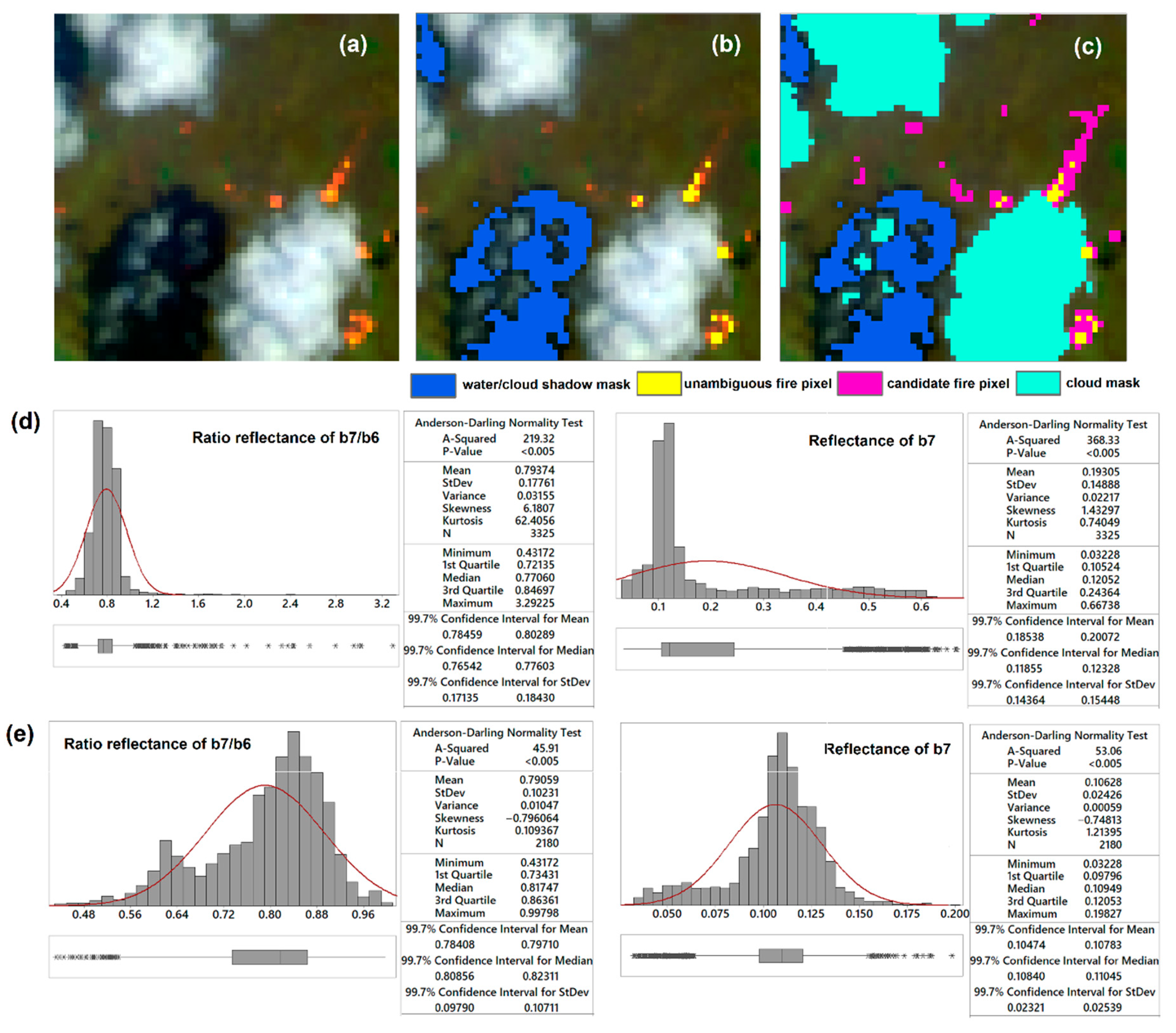
3.2.1. Water Masking
3.2.2. Permanent Bright Object Masking
- Use of multitemporal Sentinel-2 MSI images instead of Landsat-8 OLI images to acquire more images containing cloud free pixels. This is a result of the higher temporal resolution of Sentinel-2 acquisition compared with Landsat-8. The cloud free pixels of the multitemporal images from Level-1C Sentinel-2 MSI for permanent bright object mapping were obtained via the Google Earth Engine platform [58]. According to [48], geometric image quality performance for multitemporal Sentinel-2 20 m bands was 6 m (2σ). To match with the fire product of ToPeCAl-2 applied to Landsat-8, the product of permanent bright objects from SWIR-2 band of Sentinel-2 was resampled to 30 m.
- The median values of as applied by [40] instead of the mean values as used by [38]; thus, in this study, the median values of were used. This condition needs to exist in the first half-year (January–June) and in the second half-year (July–December) either in the year of data acquisition, or in the previous year. This seasonal period was selected to gain increased possibilities of obtaining cloud free images which were not based on the period of seasons in Indonesia. Otherwise, cloud free images were usually found in dry season (April–September) and barely any cloud free data in wet season (October–March). Permanent bright objects should also have relatively stable and high SWIR reflectance in any period. Thus, these conditions can be expressed as:
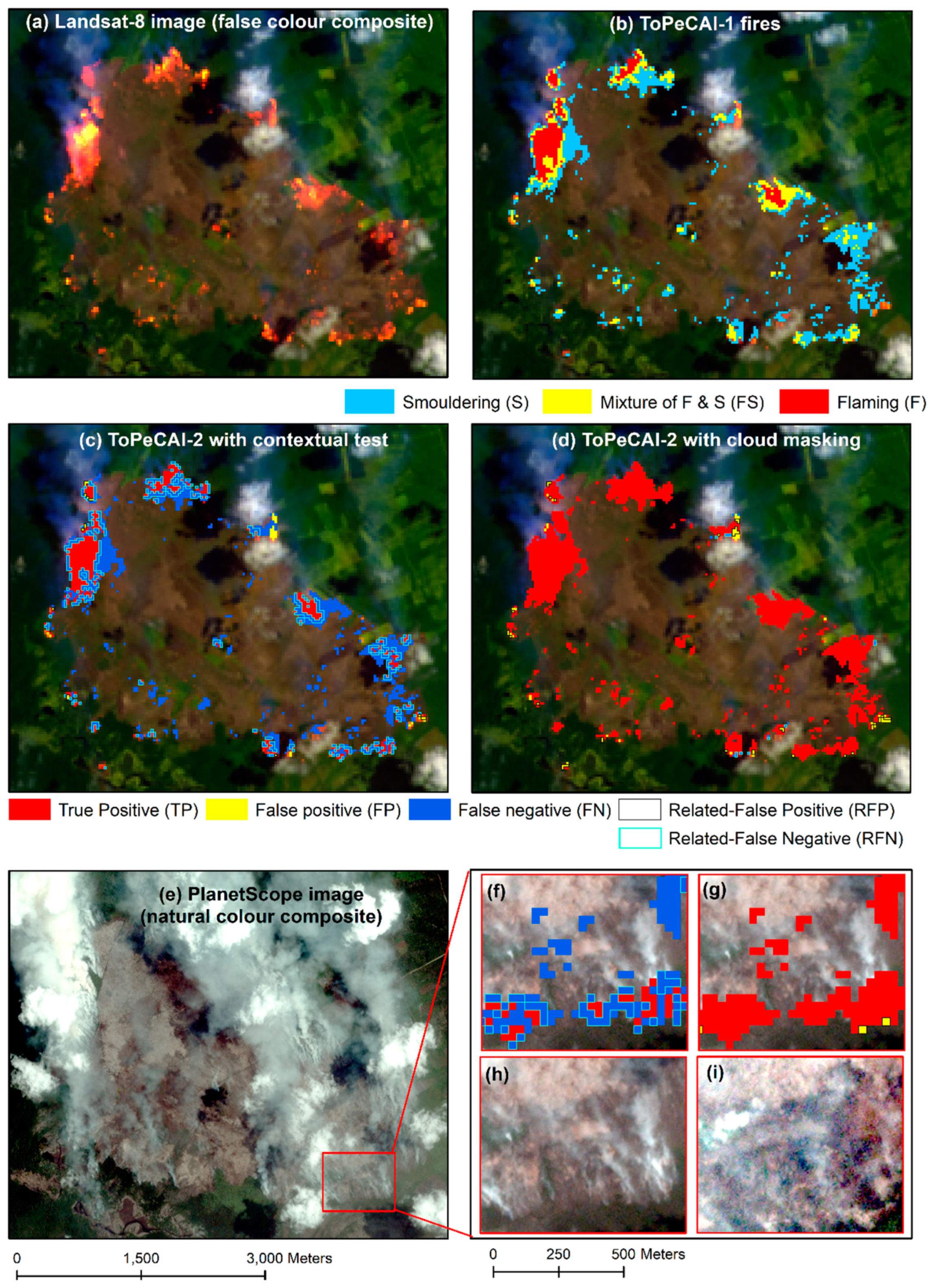
3.2.3. ToPeCAl-2 with Contextual Test
3.2.4. ToPeCAl-2 with Cloud Masking
3.2.5. Pixel-Based Comparison of ToPeCAl-2 Applied to Landsat-8 Operational Land Imager (OLI) with ToPeCAl-1 Applied to Landsat-8 OLI/Thermal Infrared Sensor (TIRS)
3.3. Implementation and Comparison of ToPeCAl-2 on Sentinel-2 Multi Spectral Instrument (MSI)
3.3.1. Sentinel-2 MSI Data Pre-Processing
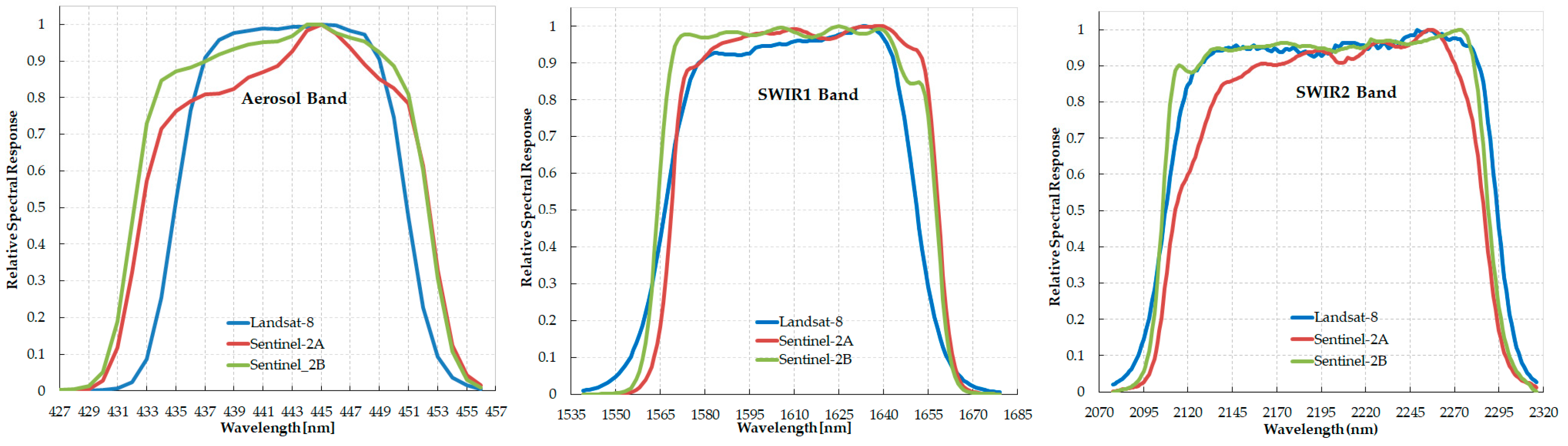
3.3.2. Sentinel-2A MSI and Landsat-8 OLI Spectral Reflectance Sensor Comparison
3.3.3. Implementation of ToPeCAl-2 Applied to Sentinel-2 MSI
3.3.4. Pixel-Based Comparison of ToPeCAl-2 Applied to Sentinel-2 MSI with ToPeCAl-1 Applied to Landsat-8 OLI/TIRS
4. Results
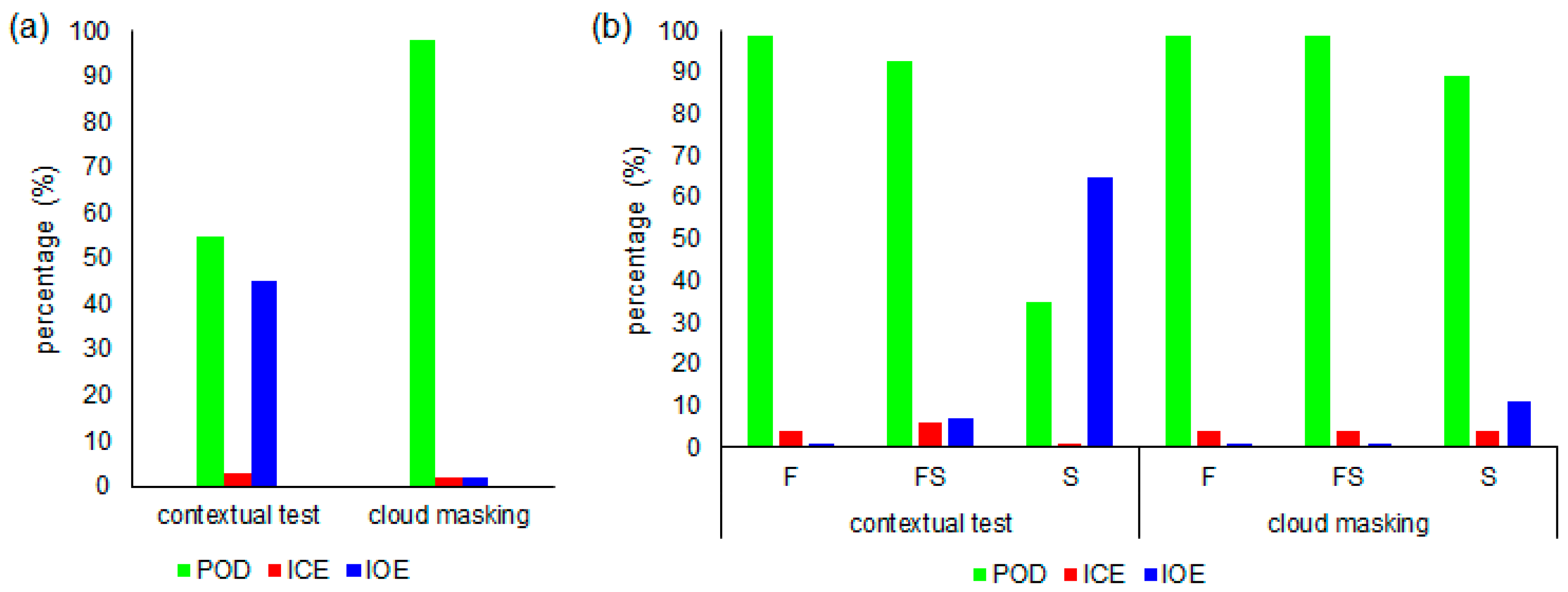
4.1. Statistical Comparison of ToPeCAl-2 Applied to Landsat-8 OLI and ToPeCAl-1 Applied to Landsat-8 OLI/TIRS
4.2. Relationship Between Top of Atmosphere (TOA) Reflectance of Landsat-8 and Sentinel-2 for Aerosol and SWIR Bands
4.3. Implementation and Comparison of ToPeCAl-2 Applied to Sentinel-2 MSI
5. Discussion
5.1. Comparison and Adjustment of ToPeCAl-2 to Landsat-8 OLI
5.2. Relationships between TOA Reflectance of Sentinel-2 and Landsat-8 at Aerosol and SWIR bands
5.3. The Application of ToPeCAl-2 to Sentinel-2 Data
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | TN (Pixel) | TP (Pixel) | FP (Pixel) | RFP (Pixel) * | IFP (Pixel) | FN (Pixel) | RFN (Pixel) * | IFN (Pixel) | POD (%) | ICE (%) | IOE (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (d) | (e) | (f) | (g) | (h) | ||||
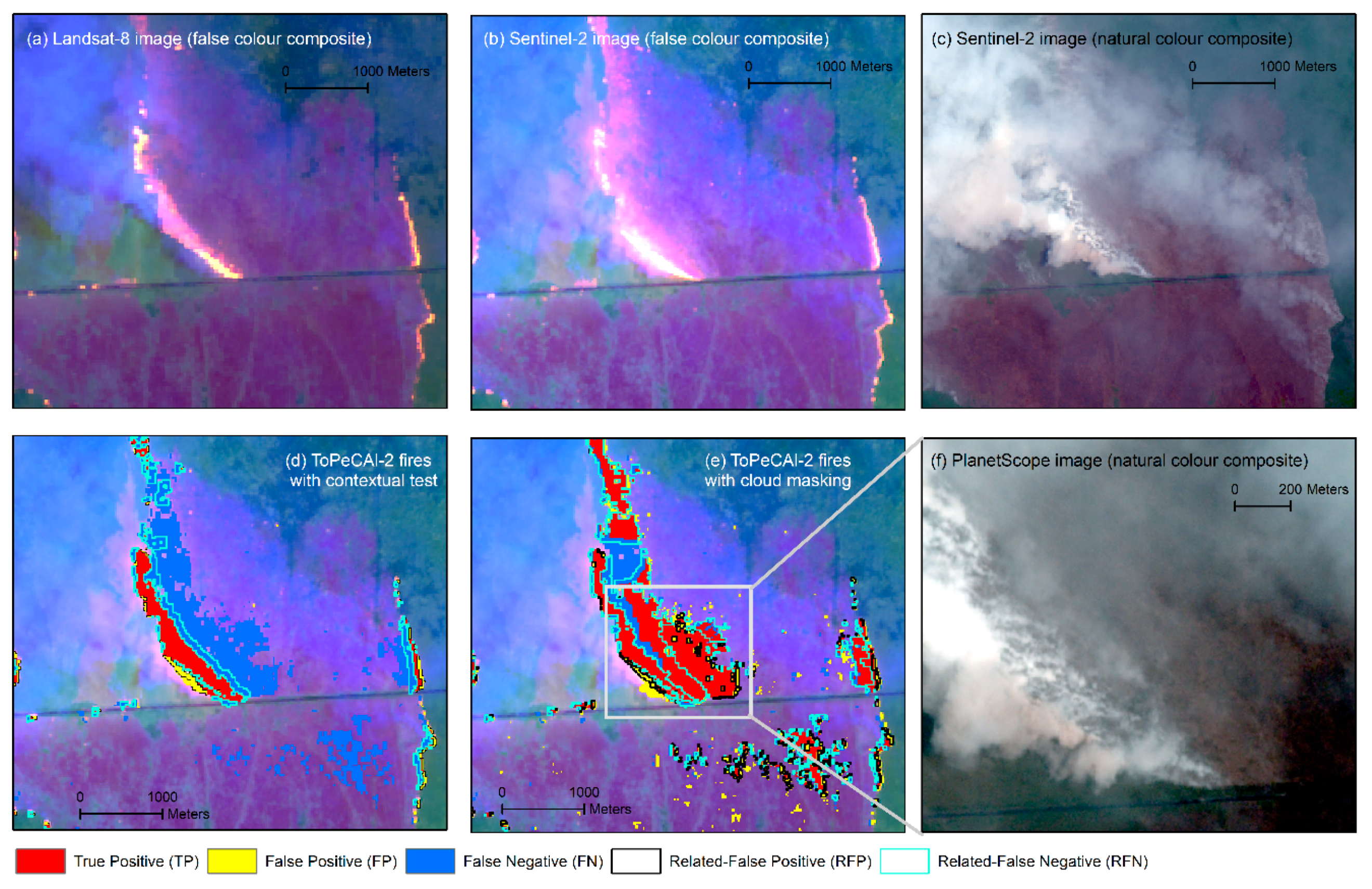
| Contextual | 609,216,243 | 37,041 | 2551 | 606 | 1945 | 63,124 | 17,915 | 45,209 | 55 | 3 | 45 |
| Cloud masking | 609,216,383 | 96,847 | 2413 | 831 | 1582 | 3312 | 1477 | 1835 | 98 | 2 | 2 |
| Method | TN (pixel) | Fire Classes | TP (Pixel) | FP (Pixel) | RFP (Pixel) * | IFP (Pixel) | FN (Pixel) | RFN (Pixel) * | IFN (Pixel) | POD (%) | ICE (%) | IOE (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (d) | (e) | (f) | (g) | (h) | |||||
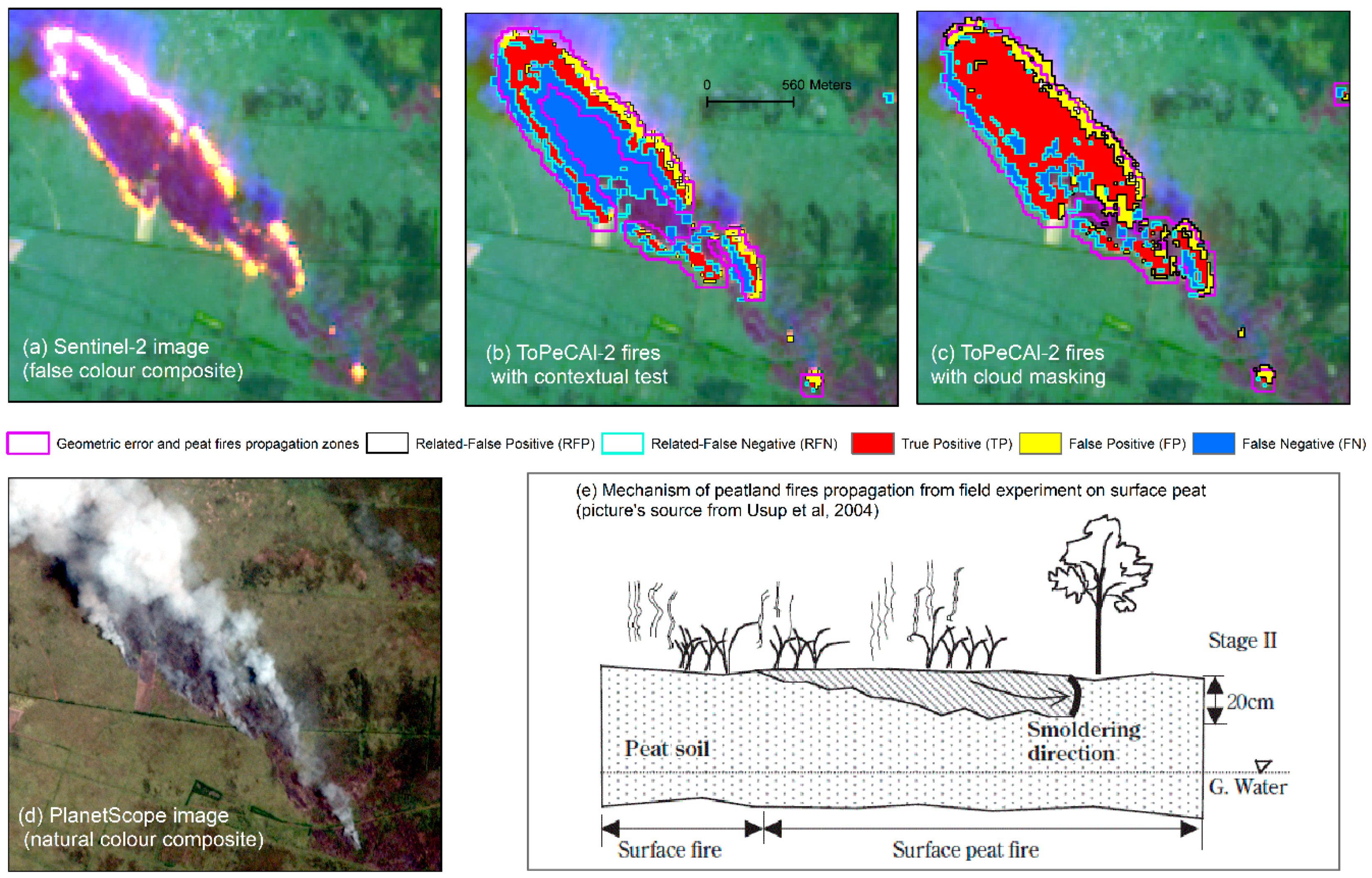
| Contextual | 609,216,245 | F | 11,971 | 871 | 301 | 570 | 252 | 167 | 85 | 99 | 4 | 1 |
| FS | 13,842 | 1374 | 291 | 1083 | 2945 | 1823 | 1122 | 93 | 6 | 7 | ||
| S | 7842 | 306 | 14 | 292 | 59,925 | 15,925 | 44,000 | 35 | 1 | 65 | ||
| Cloud mask | 609,216,383 | F | 11,971 | 871 | 322 | 549 | 252 | 138 | 114 | 99 | 4 | 1 |
| FS | 17,187 | 1129 | 457 | 672 | 618 | 489 | 129 | 99 | 4 | 1 | ||
| S | 65,481 | 413 | 41 | 372 | 2286 | 1142 | 1144 | 89 | 4 | 11 |
| Band | Site | Acquisition Date | Intercept | Slope | n | R2 |
|---|---|---|---|---|---|---|
| Aerosol | CK-SK | 28 September 2018 a | 0.0022 | 0.9297 | 27,701,821 | 0.8585 |
| 14 August 2019 | 0.0350 | 0.7769 | 4,012,759 | 0.5439 | ||
| 6 September 2019 | −0.0071 | 1.0763 | 7,656,763 | 0.5784 | ||
| JSS | 21 August 2018 b | 0.0295 | 0.7853 | 27,540,936 | 0.5553 | |
| 31 August 2019 | 0.0928 | 0.1427 | 2,705,635 | 0.1242 | ||
| 13 September 2018 | 0.0457 | 0.3497 | 12,913,944 | 0.1642 | ||
| Riau | 16 April 2019 c | 0.0050 | 0.6378 | 4,785,880 | 0.4004 | |
| 9 May 2019 | 0.0792 | 0.3652 | 11,602,209 | 0.1379 | ||
| 28 July 2019 | 0.0850 | 0.2951 | 2,689,892 | 0.0642 | ||
| CK-SK, JSS and Riau (merged data a,b,c) | 28 September 2018 a, 21 August 2018 b, 16 April 2019 c | 0.0169 | 0.8509 | 58,716,843 | 0.6619 | |
| SWIR-1 | CK-SK | 28 September 2018 a | −0.0043 | 0.8878 | 27,701,821 | 0.8669 |
| 14 August 2019 | −0.0041 | 0.9299 | 4,012,759 | 0.8856 | ||
| 6 September 2019 | 0.0164 | 0.8552 | 7,656,763 | 0.7647 | ||
| JSS | 21 August 2018 b | 0.0193 | 0.8516 | 27,540,936 | 0.7769 | |
| 31 August 2019 | 0.0654 | 0.2717 | 2,705,635 | 0.4016 | ||
| 13 September 2018 | 0.0295 | 0.4261 | 12,913,944 | 0.6305 | ||
| Riau | 16 April 2019 c | 0.0305 | 0.7213 | 4,785,880 | 0.6091 | |
| 9 May 2019 | 0.0681 | 0.5808 | 11,602,209 | 0.4267 | ||
| 28 July 2019 | 0.0638 | 0.3316 | 2,689,892 | 0.4026 | ||
| CK-SK, JSS and Riau (merged data a,b,c) | 28 September 2018 a, 21 August 2018 b, 16 April 2019 c | 0.0131 | 0.8404 | 58,716,843 | 0.7856 | |
| SWIR-2 | CK-SK | 28 September 2018 a | 0.0004 | 0.8553 | 27,701,821 | 0.8649 |
| 14 August 2019 | −0.0002 | 0.8968 | 4,012,759 | 0.8846 | ||
| 6 September 2019 | 0.0059 | 0.8710 | 7,656,763 | 0.8099 | ||
| JSS | 21 August 2018 b | 0.0064 | 0.8776 | 27,540,936 | 0.8261 | |
| 31 August 2019 | 0.0170 | 0.3298 | 2,705,635 | 0.5879 | ||
| 13 September 2018 | 0.0108 | 0.4459 | 12,913,944 | 0.7337 | ||
| Riau | 16 April 2019 c | 0.0089 | 0.7771 | 4,785,880 | 0.7094 | |
| 9 May 2019 | 0.0222 | 0.6619 | 11,602,209 | 0.5070 | ||
| 28 July 2019 | 0.0246 | 0.3680 | 2,689,892 | 0.4148 | ||
| CK-SK, JSS and Riau (merged data a,b,c) | 28 September 2018 a, 21 August 2018 b, 16 April 2019 c | 0.0041 | 0.8549 | 58,716,843 | 0.8318 |
| Method | TN (Pixel) | TP (Pixel) | FP (Pixel) | RFP (Pixel) * | IFP (Pixel) | FN (Pixel) | RFN (Pixel) * | IFN (Pixel) | POD (%) | ICE (%) | IOE (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (d) | (e) | (f) | (g) | (h) | ||||
| ToPeCAl-2 with Contextual test | |||||||||||
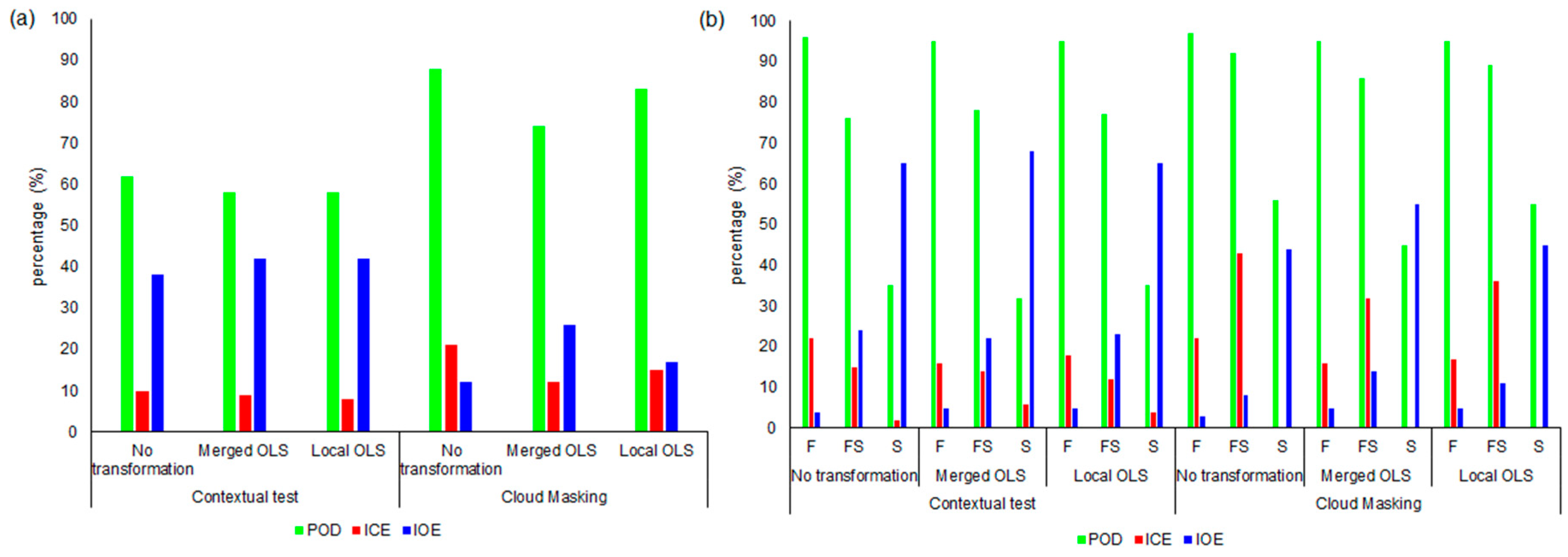
| No transformation | 128,855,177 | 22,664 | 9422 | 4578 | 4844 | 46,923 | 18,434 | 28,489 | 62 | 10 | 38 |
| Merged OLS | 128,541,534 | 19,002 | 8279 | 4202 | 4077 | 50,985 | 19,457 | 31,528 | 58 | 9 | 42 |
| Local OLS | 128,552,020 | 19,632 | 7435 | 3675 | 3760 | 50,460 | 19,648 | 30,812 | 58 | 8 | 42 |
| ToPeCAl-2 with Cloud Masking | |||||||||||
| No transformation | 128,909,378 | 38,169 | 29,013 | 10,505 | 18,508 | 31,937 | 22,366 | 9571 | 88 | 21 | 12 |
| Merged OLS | 128,921,723 | 29,547 | 15,634 | 7878 | 7756 | 40,530 | 20,443 | 20,087 | 74 | 12 | 26 |
| Local OLS | 128,913,901 | 36,118 | 23,456 | 11,827 | 11,629 | 33,959 | 19,882 | 14,077 | 83 | 15 | 17 |
| Method | TN (Pixel) | Fire Classes | TP (Pixel) | FP (Pixel) | RFP (Pixel) * | IFP (Pixel) | FN (Pixel) | RFN (Pixel) * | IFN (Pixel) | POD (%) | ICE (%) | IOE (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (d) | (e) | (f) | (g) | (h) | |||||
| ToPeCAl-2 with Contextual test | ||||||||||||
| No transformation | 128,825,338 | F | 7102 | 5910 | 2572 | 3338 | 2336 | 1900 | 436 | 96 | 22 | 4 |
| FS | 2000 | 3002 | 1762 | 1240 | 5168 | 3069 | 2099 | 76 | 15 | 24 | ||
| S | 1327 | 774 | 411 | 363 | 39,795 | 12,881 | 26,914 | 35 | 2 | 65 | ||
| Merged OLS | 128,541,534 | F | 6215 | 3720 | 1769 | 1951 | 3092 | 2497 | 595 | 95 | 16 | 5 |
| FS | 1891 | 2768 | 1528 | 1240 | 5920 | 3908 | 2012 | 78 | 14 | 22 | ||
| S | 1053 | 1742 | 838 | 904 | 41,874 | 12,151 | 29,723 | 32 | 6 | 68 | ||
| Local OLS | 128,538,496 | F | 6242 | 4157 | 1850 | 2307 | 3229 | 2631 | 598 | 95 | 18 | 5 |
| FS | 1771 | 2357 | 1388 | 969 | 5931 | 3881 | 2050 | 77 | 12 | 23 | ||
| S | 1369 | 1177 | 568 | 609 | 37,970 | 12,116 | 25,854 | 35 | 4 | 65 | ||
| ToPeCAl-2 with Cloud Masking | ||||||||||||
| No transformation | 128,905,237 | F | 7293 | 5763 | 2525 | 3238 | 2075 | 1726 | 349 | 97 | 22 | 3 |
| FS | 2939 | 22,986 | 10,438 | 12,548 | 4764 | 3225 | 1539 | 92 | 43 | 8 | ||
| S | - | - | - | - | 24,757 | 13,801 | 10,956 | 56 | 0 | 44 | ||
| Merged OLS | 128,917,292 | F | 6198 | 3756 | 1836 | 1920 | 2954 | 2385 | 569 | 95 | 16 | 5 |
| FS | 3129 | 11,904 | 6080 | 5824 | 5353 | 3263 | 2090 | 86 | 32 | 14 | ||
| S | - | - | - | - | 31,751 | 14,409 | 17,342 | 45 | 0 | 55 | ||
| Local OLS | 128,909,701 | F | 6301 | 4101 | 1892 | 2209 | 2817 | 2319 | 498 | 95 | 17 | 5 |
| FS | 3195 | 19,150 | 9852 | 9298 | 5234 | 3299 | 1935 | 89 | 36 | 11 | ||
| S | - | - | - | - | 25,625 | 13,970 | 11,655 | 55 | 0 | 45 | ||
References
- Page, S.E.; Rieley, J.; Banks, C. Global and regional importance of the tropical peatland carbon pool. Glob. Chang. Biol. 2011, 17, 798–818. [Google Scholar] [CrossRef]
- Page, S.E.; Baird, A.J. Peatlands and global change: Response and resilience. Annu. Rev. Environ. Resour. 2016, 41, 35–57. [Google Scholar] [CrossRef]
- Carlson, K.M.; Goodman, L.K.; May-Tobin, C.C. Modeling relationships between water table depth and peat soil carbon loss in Southeast Asian plantations. Environ. Res. Lett. 2015, 10, 074006. [Google Scholar] [CrossRef]
- Stockwell, C.E.; Jayarathne, T.; Cochrane, M.A.; Ryan, K.C.; Putra, E.I.; Saharjo, B.H.; Nurhayati, A.D.; Albar, I.; Blake, D.R.; Simpson, I.J.; et al. Field measurements of trace gases and aerosols emitted by peat fires in Central Kalimantan, Indonesia, during the 2015 El Niño. Atmos. Chem. Phys. 2016, 16, 11711–11732. [Google Scholar] [CrossRef]
- Murdiyarso, D.; Lilleskov, E.; Kolka, R. Tropical peatlands under siege: The need for evidence-based policies and strategies. Mitig. Adapt. Strateg. Glob. Chang. 2019, 24, 493–505. [Google Scholar] [CrossRef]
- Huijnen, V.; Wooster, M.J.; Kaiser, J.W.; Gaveau, D.L.A.; Flemming, J.; Parrington, M.; Inness, A.; Murdiyarso, D.; Main, B.; van Weele, M. Fire carbon emissions over Maritime Southeast Asia in 2015 largest since 1997. Sci. Rep. UK 2016, 6, 26886. [Google Scholar] [CrossRef]
- Rein, G. Smouldering fires and natural fuels. In Fire Phenomena and the Earth System: An Interdisciplinary Guide to Fire Science; Belcher, C.M., Ed.; Wiley and Sons: Hoboken, New Jersey, USA, 2013; Chapter 2; pp. 15–34. ISBN 978-047-06574-8-5. [Google Scholar]
- Rein, G. Smoldering combustion. In SFPE Handbook of Fire Protection Engineering; Hurley, M.J., Gottuk, D.T., Hall, J.R., Jr., Harada, K., Kuligowski, E.D., Puchovsky, M., Torero, J.L., Watts, J.M., Jr., Wieczorek, C.J., Eds.; Springer: New York, NY, USA, 2016; pp. 581–603. [Google Scholar]
- Hooijer, A.; Silvius, M.; Woesten, H.; Page, S. Peat-CO2 Assessment of CO2 Emissions from Drained Peatlands in SE Asia; Delft Hydraulics Report Q3943; Delft Hydraulics: Delft, The Netherlands, 2006; p. 41. [Google Scholar]
- Joosten, H.; Clarke, D. Wise Use of Mires and Peatlands; International Mire Conservation Group and International Peat Society: Devon, UK, 2002; ISBN 951-97744-8-3. [Google Scholar]
- Parish, F.; Sirin, A.; Charman, D.; Joosten, H.; Minayeva, T.; Silvius, M.; Stringer, L. Assessment of Peatlands, Biodiversity, and Climate Change; Global Environment Centre and Wetland International: Kuala Lumpur, Malaysia; Wageningen, The Netherlands, 2008; ISBN 978-983-43751-0-2. [Google Scholar]
- Rydin, H.; Jeglum, J.K. The Biology of Peatlands; Oxford University Press: Oxford, UK, 2006; ISBN 9780198528722. [Google Scholar] [CrossRef]
- Suyanto, S.; Applegate, G.; Permana, R.; Khususiyah, N.; Kurniawan, I. The role of fire in changing land use and livelihoods in Riau-Sumatra. Ecol. Soc. 2004, 9, 15. [Google Scholar] [CrossRef]
- Kobayashi, S.; Segah, H.; Momota, E. Local community safeguard by REDDC and payment for ecosystem services (PES) in peatland. In Tropical Peatland Ecosystems; Osaki, M., Tsuji, N., Eds.; Springer: Tokyo, Japan, 2016; pp. 563–584. ISBN 978-4-431-55680-0. [Google Scholar] [CrossRef]
- Rieley, J.; Page, S. Tropical peatland of the world. In Tropical Peatland Ecosystems; Osaki, M., Tsuji, N., Eds.; Springer: Tokyo, Japan, 2016; pp. 3–32. ISBN 978-4-431-55680-0. [Google Scholar] [CrossRef]
- Miettinen, J.; Liew, S.C. Connection between fire and land cover change in Southeast Asia: A remote sensing case study in Riau, Sumatra. Int. J. Remote Sens. 2005, 26, 1109–1126. [Google Scholar] [CrossRef]
- Boer, R.; Dewi, R.G.; Ardiansyah, M.; Siagian, U.W. Indonesia Second Biennial Update Report, Under the United Nations Framework Convention on Climate Change; Directorate General of Climate Change, Ministry of Environment and Forestry: Jakarta, Indonesia, 2018; ISBN 978-602-51356-8-2.
- Global Fire Data. Global Fire Emissions Database. Available online: http://globalfiredata.org/pages/data/ (accessed on 1 July 2020).
- Climate Prediction Center, National Oceanic and Atmospheric Administration. Cold & Warm Episodes by Season. Available online: https://origin.cpc.ncep.noaa.gov/products/analysis_monitoring/ensostuff/ONI_v5.php (accessed on 1 July 2020).
- Physical Sciences Laboratory, National Oceanic and Atmospheric Administration. Dipole Mode Index. Available online: https://psl.noaa.gov/gcos_wgsp/Timeseries/DMI/ (accessed on 14 September 2020).
- Alsepan, G.; Minobe, S. Relations between interannual variability of regional-scale Indonesian precipitation and large-scale climate modes during 1960–2007. J. Clim. 2020, 33, 5271–5291. [Google Scholar] [CrossRef]
- Pan, X.; Chin, M.; Ichoku, C.M.; Field, R.D. Connecting Indonesian fires and drought with the type of el niño and phase of the indian ocean dipole during 1979–2016. J. Geophys. Res. Atmos. 2018, 123, 7974–7988. [Google Scholar] [CrossRef]
- Bowen, M.R.; Bompard, J.M.; Anderson, I.P.; Guizol, P.; Gouyon, A. Anthropogenic Fires in Indonesia: A View from Sumatra. In Forest Fires and Regional Haze in Southeast Asia; Eaton, P., Radojevic, M., Eds.; Nova Science: New York, NY, USA, 2000; pp. 41–66. [Google Scholar]
- Dennis, R.A.; Mayer, J.; Applegate, G.; Chokkalingam, U.; Colfer, C.J.P.; Kurniawan, I.; Lachowski, H.; Maus, P.; Permana, R.P.; Ruchiat, Y.; et al. Fire, people and pixels: Linking social science and remote sensing to understand underlying causes and impacts of fires in Indonesia. Hum. Ecol. 2005, 33, 465–504. [Google Scholar] [CrossRef]
- Purnomo, H.; Shantiko, B.; Sitorus, S.; Gunawan, H.; Achdiawan, R.; Kartodihardjo, H.; Dewayani, A.A. Fire economy and actor network of forest and land fires in Indonesia. For. Policy Econ. 2017, 78, 21–31. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Zhizhin, M.; Hsu, F.; Baugh, K.; Khomarudin, M.; Vetrita, Y.; Sofan, P.; Suwarsono; Hilman, D. Long-wave infrared identification of smoldering peat fires in Indonesia with nighttime Landsat data. Environ. Res. Lett. 2015, 10, 065002. [Google Scholar] [CrossRef]
- Sofan, P.; Bruce, D.; Jones, E.; Marsden, J. Detection and validation of tropical peatland flaming and smouldering using Landsat-8 SWIR and TIRS bands. Remote Sens. 2019, 11, 465. [Google Scholar] [CrossRef]
- Siegert, F.; Zhukov, B.; Oertel, D.; Limin, S.; Page, S.E.; Rieley, J.O. Peat fires detected by the BIRD satellite. Int. J. Remote Sens. 2004, 25, 3221–3230. [Google Scholar] [CrossRef]
- Atwood, E.; Englhart, S.; Lorenz, E.; Halle, W.; Wiedemann, W.; Siegert, F. Detection and characterization of low temperature peat fires during the 2015 fire catastrophe in Indonesia using a new high-sensitivity fire monitoring satellite sensor (FireBIRD). PLoS ONE 2016, 11, e0159410. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Zhizhin, M.; Hsu, F.-C.; Baugh, K. VIIRS nightfire: Satellite pyrometry at night. Remote Sens. 2013, 5, 4423. [Google Scholar] [CrossRef]
- Sofan, P.; Bruce, D.; Schroeder, W.; Jones, E.; Marsden, J. Assessment of VIIRS 375 m active fire using tropical peatland combustion algorithm applied to Landsat-8 over Indonesia’s peatlands. Int. J. Digit. Earth 2020. [Google Scholar] [CrossRef]
- Burke, C.; Wich, S.; Kusin, K.; McAree, O.; Harrison, M.E.; Ripoll, B.; Ermiasi, Y.; Mulero-Pázmány, M.; Longmore, S. Thermal-drones as a safe and reliable method for detecting Subterranean peat fires. Drones 2019, 3, 23. [Google Scholar] [CrossRef]
- Roy, D.P.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.H.; Li, Z. Landsat-8 and Sentinel-2 burned area mapping—A combined sensor multi-temporal change detection approach. Remote Sens. Environ. 2019, 231, 111254. [Google Scholar] [CrossRef]
- Quintano, C.; Fernández-Manso, A.; Fernández-Manso, O. Combination of Landsat and Sentinel-2 MSI data for initial assessing of burn severity. Int. J. Appl. Earth Obs. 2018, 64, 221–225. [Google Scholar] [CrossRef]
- García-Llamas, P.; Suárez-Seoane, S.; Fernández-Guisuraga, J.M.; Fernández-García, V.; Fernández-Manso, A.; Quintano, C.; Taboada, A.; Marcos, E.; Calvo, L. Evaluation and comparison of Landsat 8, Sentinel-2 and Deimos-1 remote sensing indices for assessing burn severity in Mediterranean fire-prone ecosystems. Int. J. Appl. Earth Obs. 2019, 80, 137–144. [Google Scholar] [CrossRef]
- Fiona, N.; Kudzai Shaun, M.; Blessing, K.; Henry, N.; Monalisa Shingirayi, M. Exploring THE UTIlity of Sentinel-2 MSI and Landsat 8 OLI in burned area mapping for a heterogenous savannah landscape. PLoS ONE 2020, 15, e0232962. [Google Scholar]
- Giglio, L.; Csiszar, I.; Restás, Á.; Morisette, J.T.; Schroeder, W.; Morton, D.; Justice, C.O. Active fire detection and characterization with the Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER). Remote Sens. Environ. 2008, 112, 3055–3063. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Quayle, B.; Lorenz, E.; Morelli, F. Active fire detection using Landsat-8/OLI data. Remote Sens. Environ. 2016, 185, 210–220. [Google Scholar] [CrossRef]
- Murphy, S.W.; de Souza Filho, C.R.; Wright, R.; Sabatino, G.; Correa Pabon, R. Hotmap: Global hot target detection at moderate spatial resolution. Remote Sens. Environ. 2016, 177, 78–88. [Google Scholar] [CrossRef]
- Kumar, S.S.; Roy, D.P. Global operational land imager Landsat-8 reflectance-based active fire detection algorithm. Int. J. Remote Sens. 2018, 11, 154–178. [Google Scholar] [CrossRef]
- Chastain, R.; Housman, I.; Goldstein, J.; Finco, M.; Tenneson, K. Empirical cross sensor comparison of Sentinel-2A and 2B MSI, Landsat-8 OLI, and Landsat-7 ETM+ top of atmosphere spectral characteristics over the Conterminous United States. Remote Sens. Environ. 2019, 221, 274–285. [Google Scholar] [CrossRef]
- Flood, N. Comparing Sentinel-2A and Landsat 7 and 8 using surface reflectance over Australia. Remote Sens. 2017, 9, 659. [Google Scholar] [CrossRef]
- Mandanici, E.; Bitelli, G. Preliminary comparison of Sentinel-2 and Landsat 8 imagery for a combined use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef]
- Shang, R.; Zhu, Z. Harmonizing Landsat 8 and Sentinel-2: A time-series-based reflectance adjustment approach. Remote Sens. Environ. 2019, 235, 111439. [Google Scholar] [CrossRef]
- Zhang, H.K.; Roy, D.P.; Yan, L.; Li, Z.; Huang, H.; Vermote, E.; Skakun, S.; Roger, J.-C. Characterization of Sentinel-2A and Landsat-8 top of atmosphere, surface, and nadir BRDF adjusted reflectance and NDVI differences. Remote Sens. Environ. 2018, 215, 482–494. [Google Scholar] [CrossRef]
- Irons, J.R.; Dwyer, J.L.; Barsi, J.A. The Next landsat satellite: The landsat data continuity mission. Remote Sens. Environ. 2012, 122, 11–21. [Google Scholar] [CrossRef]
- Loveland, T.R.; Irons, J.R. Landsat 8: The plans, the reality, and the legacy. Remote Sens. Environ. 2016, 185, 1–6. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Barsi, J.A.; Alhammoud, B.; Czapla-Myers, J.; Gascon, F.; Haque, M.O.; Kaewmanee, M.; Leigh, L.; Markham, B.L. Sentinel-2a MSI and Landsat-8 OLI radiometric cross comparison over desert sites. Eur. J. Remote Sens. 2018, 51, 822–837. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water bodies’ mapping from Sentinel-2 imagery with modified normalized difference water index at 10-m spatial resolution produced by sharpening the SWIR band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef]
- Sun, L.; Mi, X.; Wei, J.; Wang, J.; Tian, X.; Yu, H.; Gan, P. A cloud detection algorithm-generating method for remote sensing data at visible to short-wave infrared wavelengths. ISPRS J. Photogramm. Remote Sens. 2017, 124, 70–88. [Google Scholar] [CrossRef]
- Caiazzo, F.; Malina, R.; Staples, M.D.; Wolfe, P.J.; Yim, S.H.L.; Barrett, S.R.H. Quantifying the climate impacts of albedo changes due to biofuel production: A comparison with biogeochemical effects. Environ. Res. Lett. 2014, 9, 024015. [Google Scholar] [CrossRef]
- Hayasaka, H.; Takahashi, H.; Limin, S.H.; Yulianti, N.; Usup, A. Peat fire occurrence. In Tropical Peatland Ecosystems; Osaki, M., Tsuji, N., Eds.; Springer: Tokyo, Japan, 2016; pp. 377–395. [Google Scholar]
- Usup, A.; Hashimoto, Y.; Takashi, H.; Hayasaka, H. Combustion and thermal characteristics of peat fire in tropical peatland in Central Kalimantan, Indonesia. Tropics 2004, 14, 1–19. [Google Scholar] [CrossRef]
- Wooster, M.J.; Roberts, G.; Smith, A.M.S.; Johnston, J.; Freeborn, P.; Amici, S.; Hudak, A.T. Thermal remote sensing of active vegetation fires and biomass burning events. In Thermal Infrared Remote Sensing: Sensors, Methods, Applications; Kuenzer, C., Dech, S., Eds.; Springer: Dordrecht, The Netherlands, 2013; pp. 347–390. [Google Scholar]
- Santoso, M.A.; Huang, X.; Prat-Guitart, N.; Christensen, E.; Hu, Y.; Rein, G. Smouldering Fires and Soils; CSIRO Publishing: Collingwood, Australia, 2019; p. 382. [Google Scholar]
- Xi, Y.; Thinh, N.X.; Li, C. Preliminary comparative assessment of various spectral indices for built-up land derived from Landsat-8 OLI and Sentinel-2a MSI imageries. Eur. J. Remote Sens. 2019, 52, 240–252. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- ESA. Sentinel-2 Spectral Response Functions (S2-SRF) COPE-GSEG-EOPG-TN-15-0007, 3.0 ed.; European Space Agency, 2017. Available online: https://earth.esa.int/web/sentinel/user-guides/sentinel-2-msi/document-library/-/asset_publisher/Wk0TKajiISaR/content/sentinel-2a-spectral-responses (accessed on 5 May 2020).
- Barsi, J.; Lee, K.; Kvaran, G.; Markham, B.; Pedelty, J. The spectral response of the Landsat-8 operational land imager. Remote Sens. 2014, 6, 10232–10251. [Google Scholar] [CrossRef]
- Baetens, L.; Desjardins, C.; Hagolle, O. Validation of Copernicus Sentinel-2 cloud masks obtained from MAJA, Sen2Cor, and FMask processors using reference cloud masks generated with a supervised active learning procedure. Remote Sens. 2019, 11, 433. [Google Scholar] [CrossRef]
- Spencer, R.S.; Levy, R.C.; Remer, L.A.; Mattoo, S.; Arnold, G.T.; Hlavka, D.L.; Meyer, K.G.; Marshak, A.; Wilcox, E.M.; Platnick, S.E. Exploring aerosols near clouds with high-spatial-resolution aircraft remote sensing during SEAC4RS. J. Geophys. Res. Atmos. 2019, 124, 2148–2173. [Google Scholar] [CrossRef] [PubMed]
- Várnai, T.; Marshak, A. Near-cloud aerosol properties from the 1 km resolution MODIS ocean product. J. Geophys. Res. Atmos. 2014, 119, 1546–1554. [Google Scholar] [CrossRef]
- Wen, G.; Marshak, A.; Cahalan, R.F.; Remer, L.A.; Kleidman, R.G. 3-D aerosol-cloud radiative interaction observed in collocated MODIS and ASTER images of cumulus cloud fields. J. Geophys. Res. 2007, 112, D13204. [Google Scholar] [CrossRef]
- Richter, R.; Louis, J.; Muller-Wilm, U. Sentinel-2 MSI–Level 2A Products Algorithm Theoretical Basis Document; Telespazio VEGA Deutschland GmbH: Darmstadt, Germany, 2012; Available online: https://forum.step.esa.int/uploads/default/original/2X/f/f3aa9be5ad9aab427885b536d0a30a5d47f45202.pdf (accessed on 6 May 2020).
- Storey, J.; Roy, D.P.; Masek, J.; Gascon, F.; Dwyer, J.; Choate, M. A Note on The Temporary misregistration of Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) imagery. Remote Sens. Environ. 2016, 186, 121–122. [Google Scholar] [CrossRef]
- NASA Earth Observatory. Aerosols and Clouds (Indirect Effects). Available online: https://earthobservatory.nasa.gov/features/Aerosols/page4.php (accessed on 4 September 2020).
- Feng, L.; Hu, C. Cloud adjacency effects on top-of-atmosphere radiance and ocean color data products: A statistical assessment. Remote Sens. Environ. 2016, 174, 301–313. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the FMask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Koetz, B.; Berger, M.; Blommaert, J.; Bello, U.D.; Drusch, M.; Duca, R.; Gascon, F.; Ghent, D.; Hoogeveen, J.; Hook, S.; et al. Copernicus High Spatio-Temporal Resolution Land Surface Temperature Mission: Mission Requirements Document; ESA: Noorwijk, The Netherlands, 2019; p. 89. [Google Scholar]













| Satellite/Aircraft | Sensor | Primary Spectra Used for Fire Detection | Revisit Time (Day) | Spatial Resolution (m) | Main Objective | Reference |
|---|---|---|---|---|---|---|
| Landsat-8 | OLI & TIRS | SWIR, TIR | 16 | 30 | Peatland fire detection at nighttime & daytime | [26,27] |
| BIRD | HSRS | MWIR, TIR | 2–3 | 370 | Peatland fire detection at daytime | [28] |
| TET-1 | TET-1 | MWIR | 2–5 | 160 | Peatland fire detection at daytime | [29] |
| Suomi NPP | VIIRS | SWIR | 0.5 | 750 | Peatland fire detection at nighttime | [30] |
| MWIR, TIR | 0.5 | 375 | Assessment of active fire | [31] | ||
| UAV | Tau2 TIR | TIR | as needed | 0.185 | Peatland fire detection at daytime | [32] |
| Landsat-8 OLI/TIR | Sentinel-2 MSI | Type of Information and Purpose | ||||
|---|---|---|---|---|---|---|
| Band | Centre Wavelength (µm) | Spatial Resolution (m) | Band | Centre Wavelength (µm) | Spatial Resolution (m) | |
| 1 (coastal aerosol) | 0.443 | 30 | 1 (coastal aerosol) | 0.433 | 20 (resampled from 60) | TOA reflectance for classifying clear and smoky atmosphere |
| 3 (Green) | 0.561 | 30 | 3 (Green) | 0.560 | 20 (resampled from 10) | TOA reflectance for water masking |
| 4 (Red) | 0.665 | 30 | - | - | - | TOA reflectance for cloud masking |
| 5 (NIR) | 0.865 | 30 | 8a (NIR) | 0.865 | 20 | TOA reflectance for water masking |
| 6 (SWIR-1) | 1.609 | 30 | 11 (SWIR-1) | 1.610 | 20 | TOA reflectance for fire mapping & water masking |
| 7 (SWIR-2) | 2.201 | 30 | 12 (SWIR-2) | 2.190 | 20 | TOA reflectance for fire mapping & bright object mapping |
| 10 (TIR) | 10.9 | 30 (resampled from 100) | - | - | - | TOA brightness temperature for fire mapping |
| Study Area | Acquisition Date | Landsat-8′s Path/Row |
|---|---|---|
| Central Kalimantan and South Kalimantan | 11 August 2018 | 118/062 |
| 12 September 2018 | 118/062 | |
| 28 September 2018 | 118/062 | |
| 29 July 2019 | 118/062 | |
| 14 August 2019 | 118/062 | |
| 6 September 2019 | 119/062 | |
| West Kalimantan | 9 September 2015 | 121/061 |
| Jambi and South Sumatera | 11 October 2019 | 124/062 |
| 27 October 2019 | 124/062 | |
| 20 August 2015 | 125/061 | |
| 15 August 2019 | 125/061 | |
| 31 August 2019 | 125/061 | |
| Riau | 7 September 2019 | 126/060 |
| 20 August 2016 | 127/059 | |
| 29 August 2019 | 127/059 |
| Study Area | Acquisition Date | Landsat-8′s Path/Row | Sentinel-2′s Tile | Difference Time (Minutes) | Fire Features |
|---|---|---|---|---|---|
| Central Kalimantan and South Kalimantan | 28 September 2018 | 118/062 | S-2A (T49MHS, T49MHT, T50MKB, T50MKC) | 9 | Yes |
| 14 August 2019 | 118/062 | S-2A (T49MHT, T50MKC) | 9 | Yes | |
| Central Kalimantan | 6 September 2019 | 119/062 | S-2A (T49MGS, T49MGT, T49MHT) | 5 | Yes |
| Jambi and South Sumatera | 21 August 2018 | 124/061 124/062 | S-2A (T48MVC, T48MVD, T48MWC) | 5 | No |
| 31 August 2019 | 125/061 | S-2B (T48MUD) | 12 | Yes | |
| 13 September 2018 | 125/061 | S-2A (T48MUD) | 2 | No | |
| Riau | 16 April 2019 | 126/059 | S-2B (T47NRA, T47NRB, T48NTF, T48NTG) | 7 | No |
| 9 May 2019 | 127/059 | S-2B (T47NPB, T47NQC, T47NRB) | 3 | No | |
| 28 July 2019 | 127/059 | S-2B (T47NQB) | 4 | No |
| Object | ToPeCAl-1 | ToPeCAl-2 | Recommendation for Eliminating the False Positive Pixels on ToPeCAl-2 |
|---|---|---|---|
| Edge of cloud | no | yes | Contextual test or cloud masking |
| Permanent bright objects | less | more | permanent bright object masking |
| OLS Model | Site | Acquisition Date | n (Pixel) | Mean of the Differences of MSI-OLI | ||
|---|---|---|---|---|---|---|
| Aerosol Band | SWIR-1 Band | SWIR-2 Band | ||||
| No-transformation | CK-SK JSS Riau | 28 September 2018 21 August 2018 16 April 2019 | 58,716,843 | 0.004497 * | 0.017121 * | 0.008576 * |
| Merged OLS model | CK-SK JSS Riau | 28 September 2018 21 August 2018 16 April 2019 | 58,716,843 | 0.000047 * | 0.000015 * | 0.000027 * |
| Local OLS model | CK-SK JSS Riau | 28 September 2018 21 August 2018 16 April 2019 | 58,716,843 | −0.006369 * | 0.000024 * | 0.000193 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sofan, P.; Bruce, D.; Jones, E.; Khomarudin, M.R.; Roswintiarti, O. Applying the Tropical Peatland Combustion Algorithm to Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) Imagery. Remote Sens. 2020, 12, 3958. https://doi.org/10.3390/rs12233958
Sofan P, Bruce D, Jones E, Khomarudin MR, Roswintiarti O. Applying the Tropical Peatland Combustion Algorithm to Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) Imagery. Remote Sensing. 2020; 12(23):3958. https://doi.org/10.3390/rs12233958
Chicago/Turabian StyleSofan, Parwati, David Bruce, Eriita Jones, M. Rokhis Khomarudin, and Orbita Roswintiarti. 2020. "Applying the Tropical Peatland Combustion Algorithm to Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) Imagery" Remote Sensing 12, no. 23: 3958. https://doi.org/10.3390/rs12233958
APA StyleSofan, P., Bruce, D., Jones, E., Khomarudin, M. R., & Roswintiarti, O. (2020). Applying the Tropical Peatland Combustion Algorithm to Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) Imagery. Remote Sensing, 12(23), 3958. https://doi.org/10.3390/rs12233958