Analysis of the Suitability of High-Resolution DEM Obtained Using ALS and UAS (SfM) for the Identification of Changes and Monitoring the Development of Selected Geohazards in the Alpine Environment—A Case Study in High Tatras, Slovakia

 ,
,  , , ,
, , ,  and
and 
Abstract
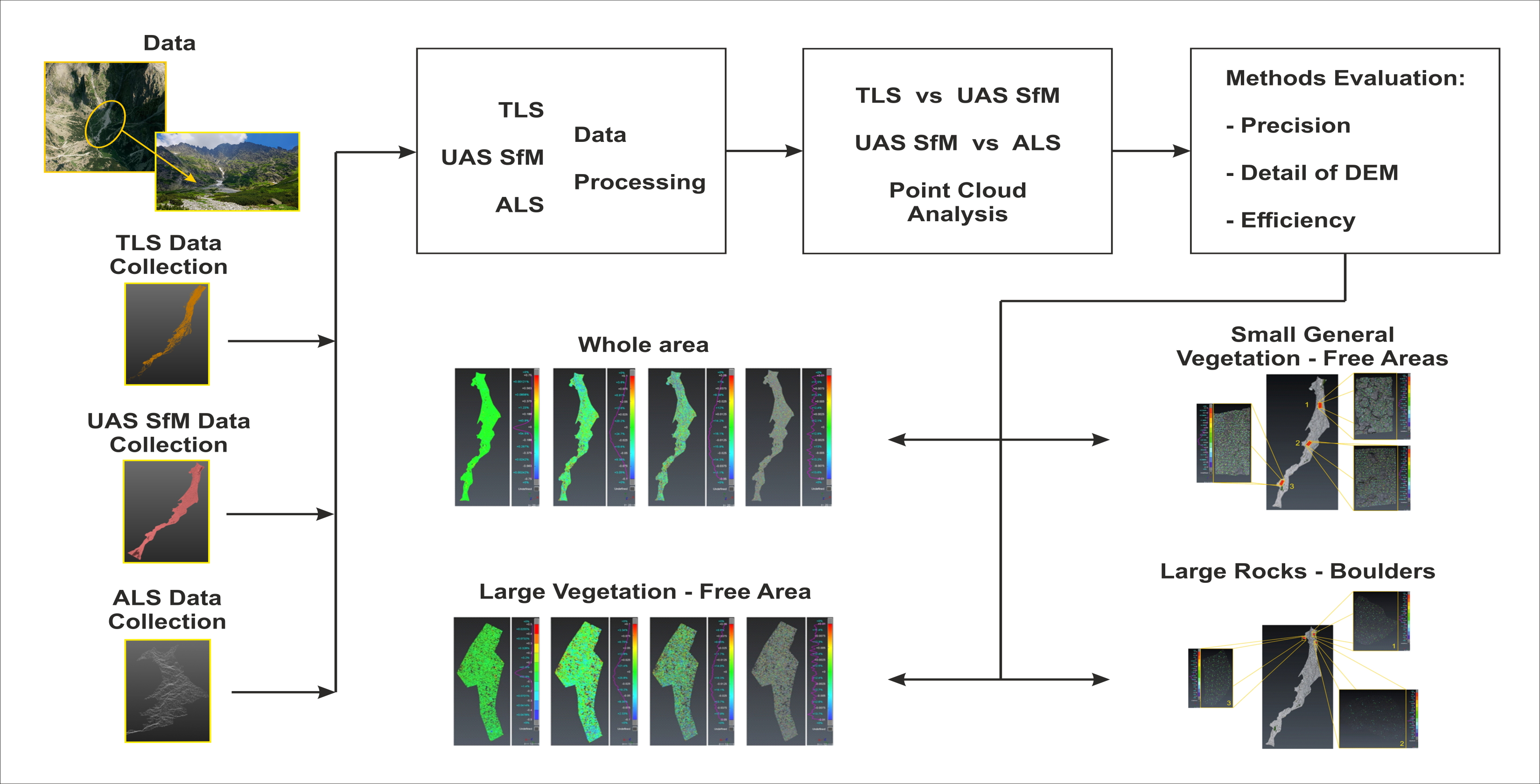
1. Introduction
- Terrestrial laser scanner (TLS),
- Digital photogrammetry using UAS,
- Airborne laser scanning (ALS; Source of ALS products: ÚGKK SR; provided for our research by the Geodetic and Cartographic Institute of the Slovak Republic; described in [39]).
Aim of the Research
- Development of various geological phenomena such as weathering and movement of weathered material on a slope, development of erosion, etc.,
- The formation and development of geohazards such as landslides and falls, torrential rains and flash floods, and changes in the alpine landscape caused by them,
- Anthropogenic changes caused by human activity in urbanization and land use (construction of roads, sidewalks, construction of cottages, sports grounds, etc.).
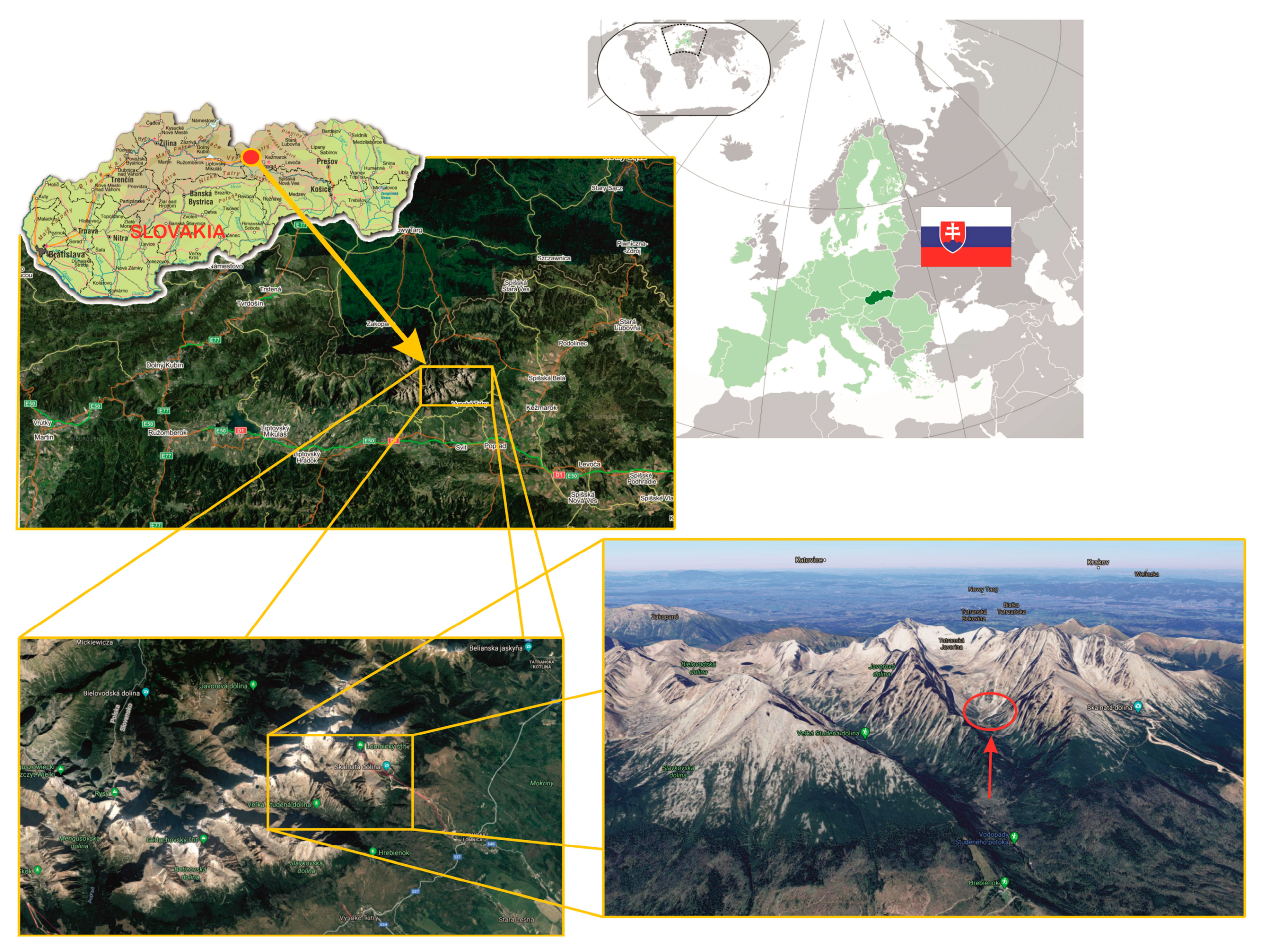
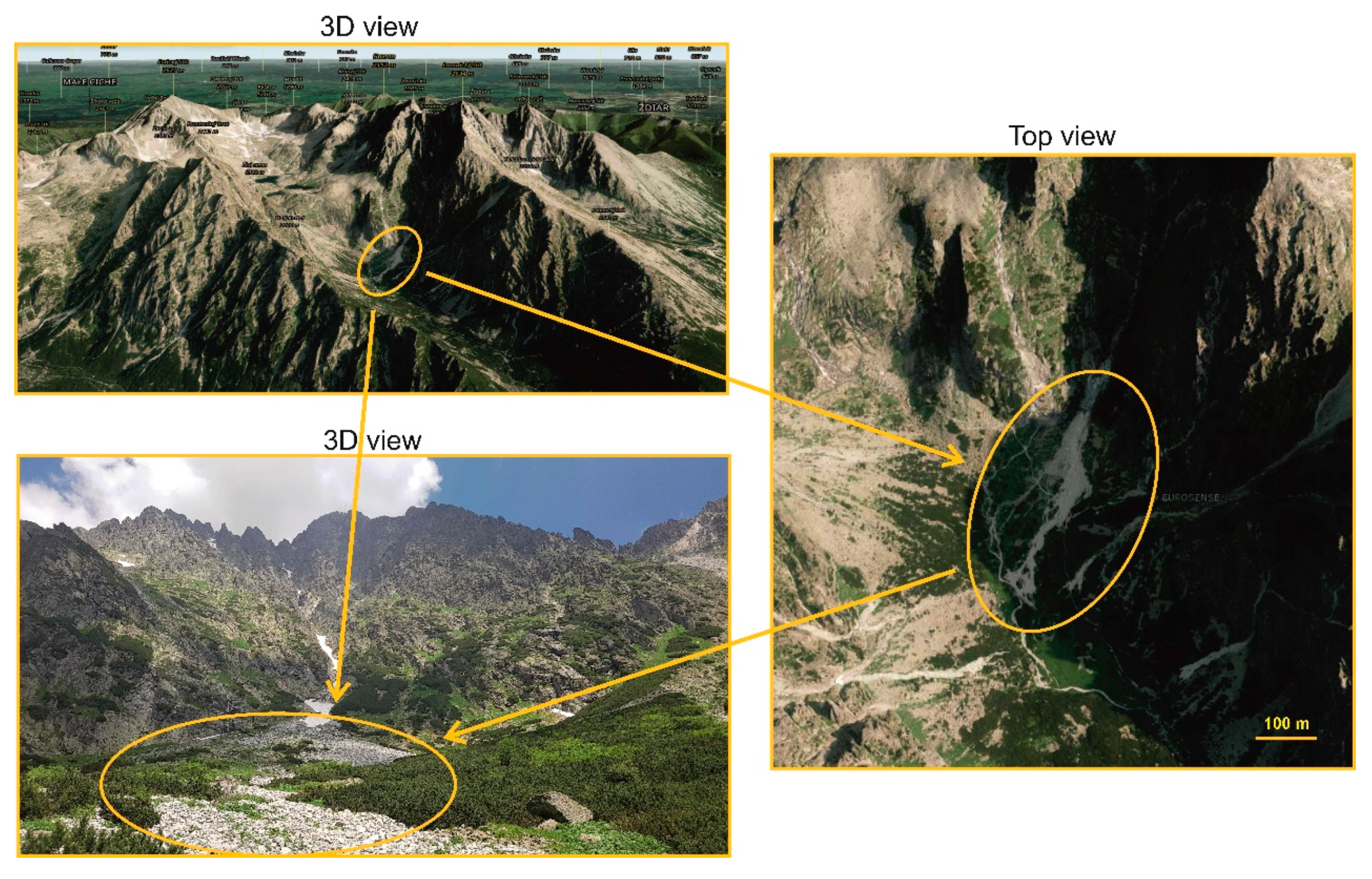
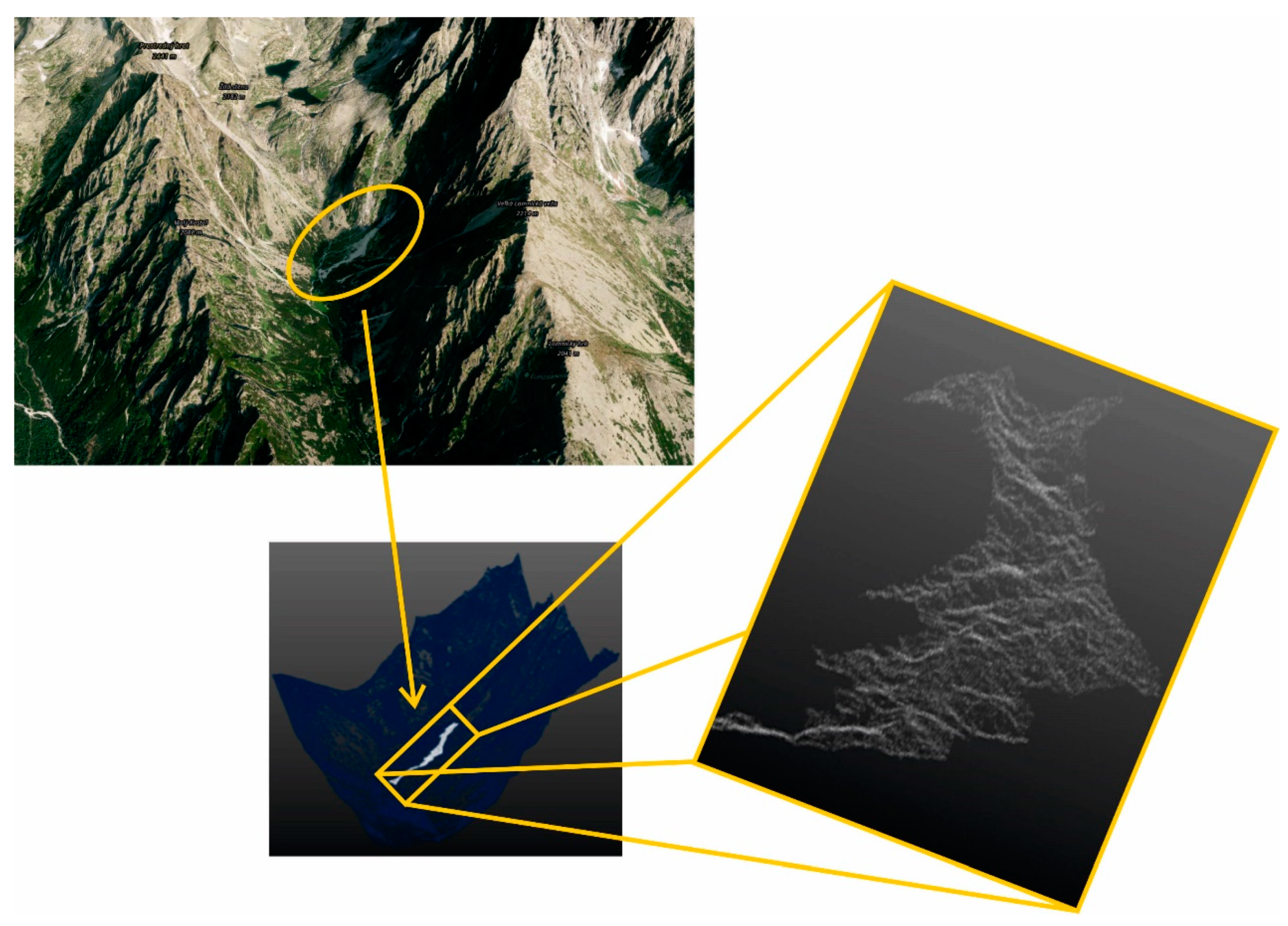
2. Study Area
2.1. Geographical Location
2.2. Description of the Study Area
3. Field Surveying and Equipment
- The survey project, determination of the extent of the area of interest, design, and deployment of the geodetic network based on available map materials.
- Monumentation and surveying of fixed points of the geodetic network.
- Determination of GCP coordinates for TLS and photogrammetry.
- TLS measurement and photogrammetric imaging.
- Control and verification measurement.
3.1. GNSS Surveying
3.2. Geodetic Network and GCPs
3.3. TLS Surveying
3.4. UAS Photogrammetry
4. Processing of Measured Data and Datasets
4.1. TLS Data Processing
4.2. SfM Processing of Photogrammetric Data
4.3. Airborne Laser Scanning (ALS)
5. Analysis of Point Clouds and Results
5.1. TLS vs. UAS Evaluation
5.1.1. The Whole Area
5.1.2. Partial Areas
5.2. UAS vs. ALS Evaluation
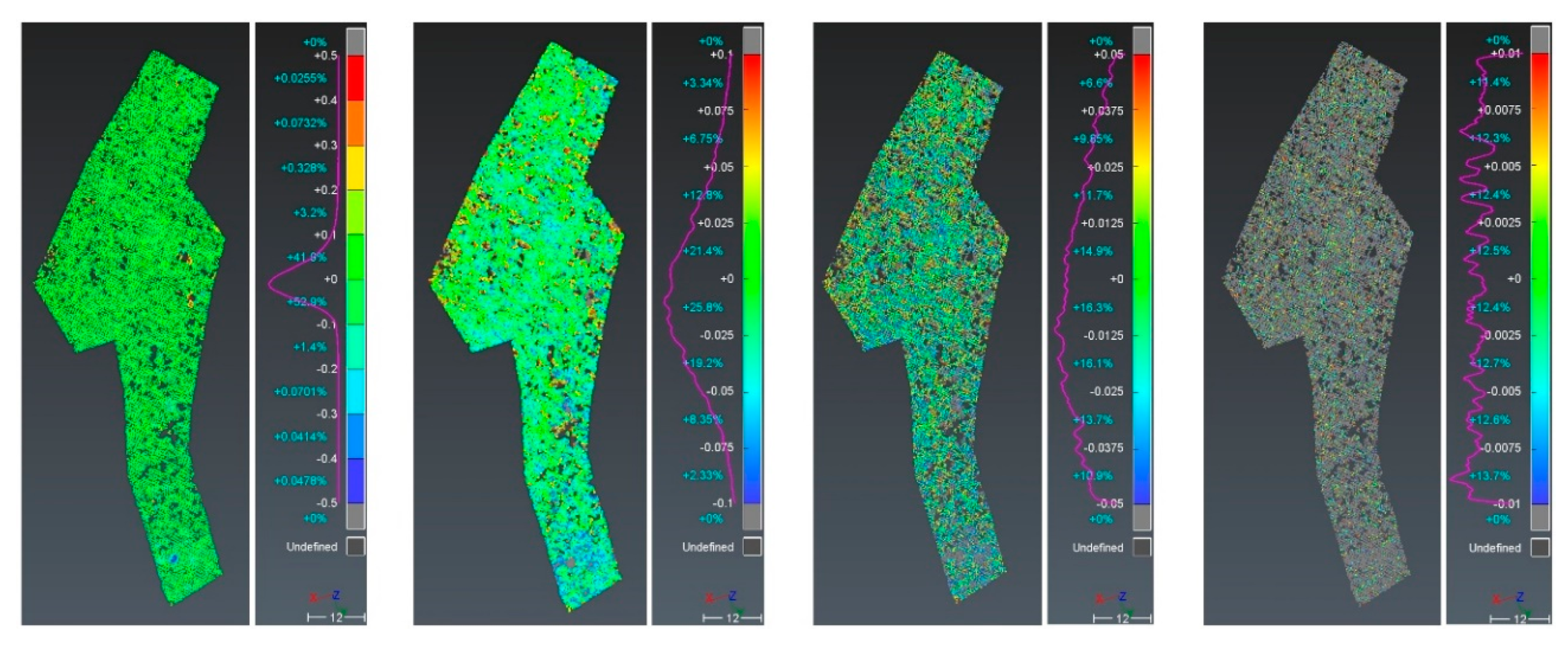
5.2.1. The Whole Area
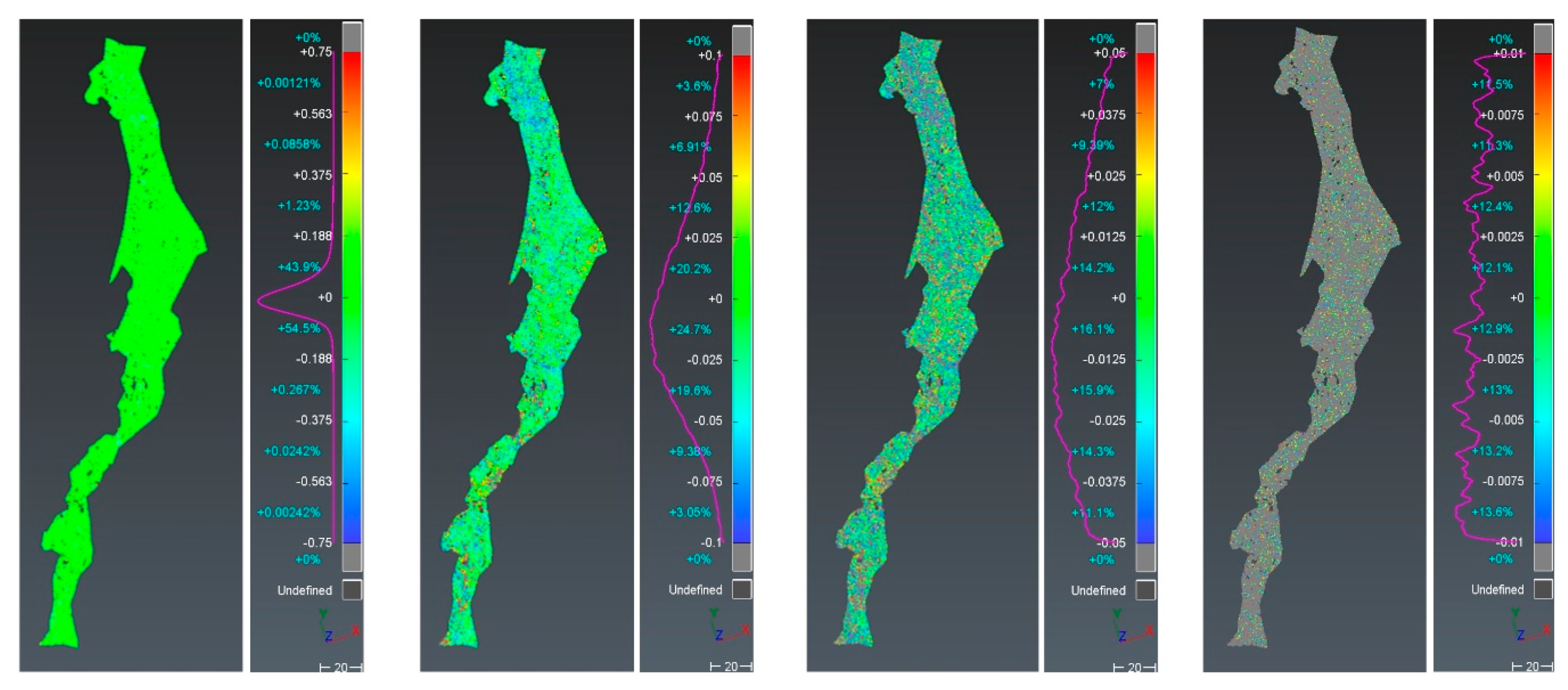
5.2.2. Large Vegetation-Free Area
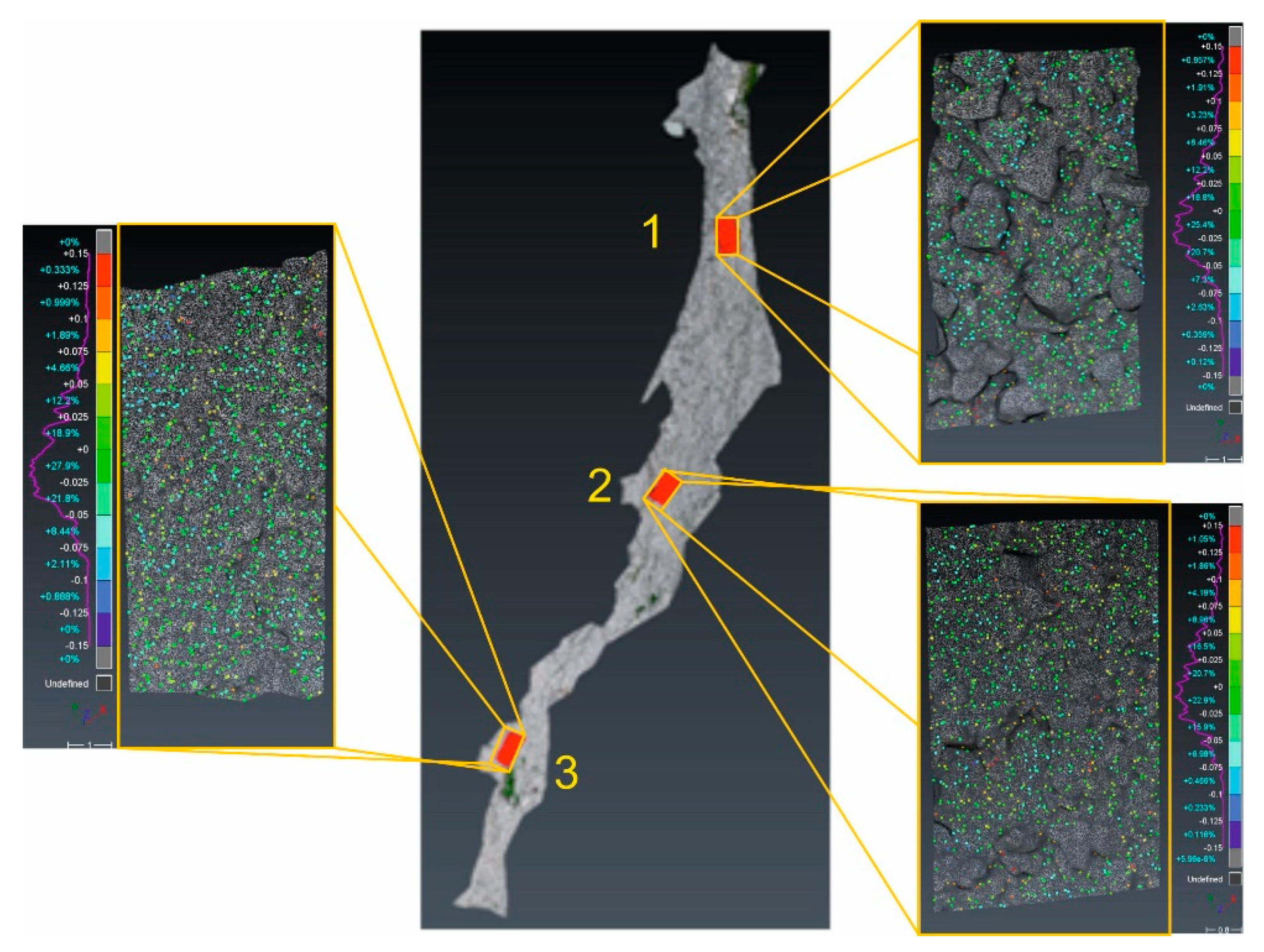
5.2.3. Small General Vegetation-Free Areas
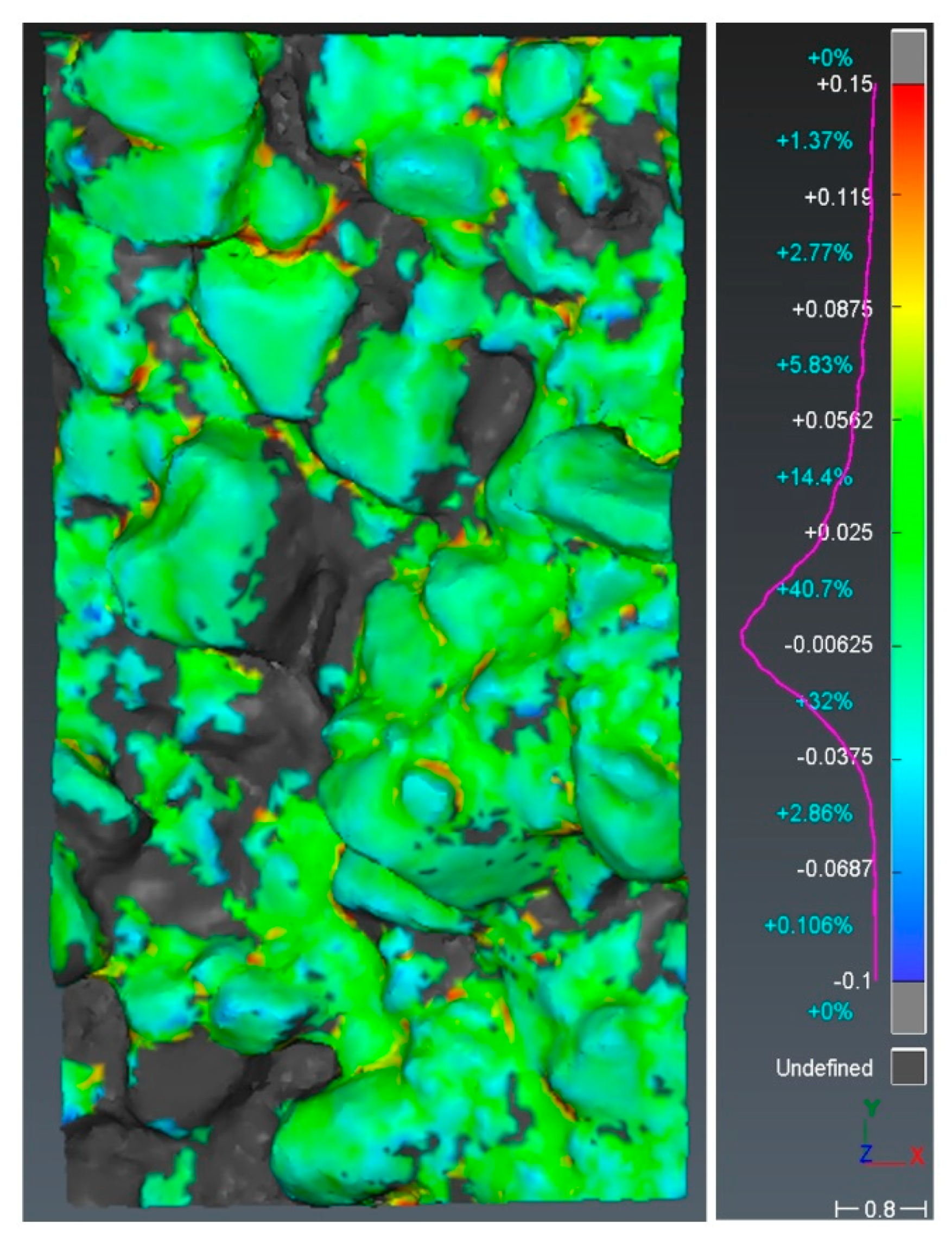
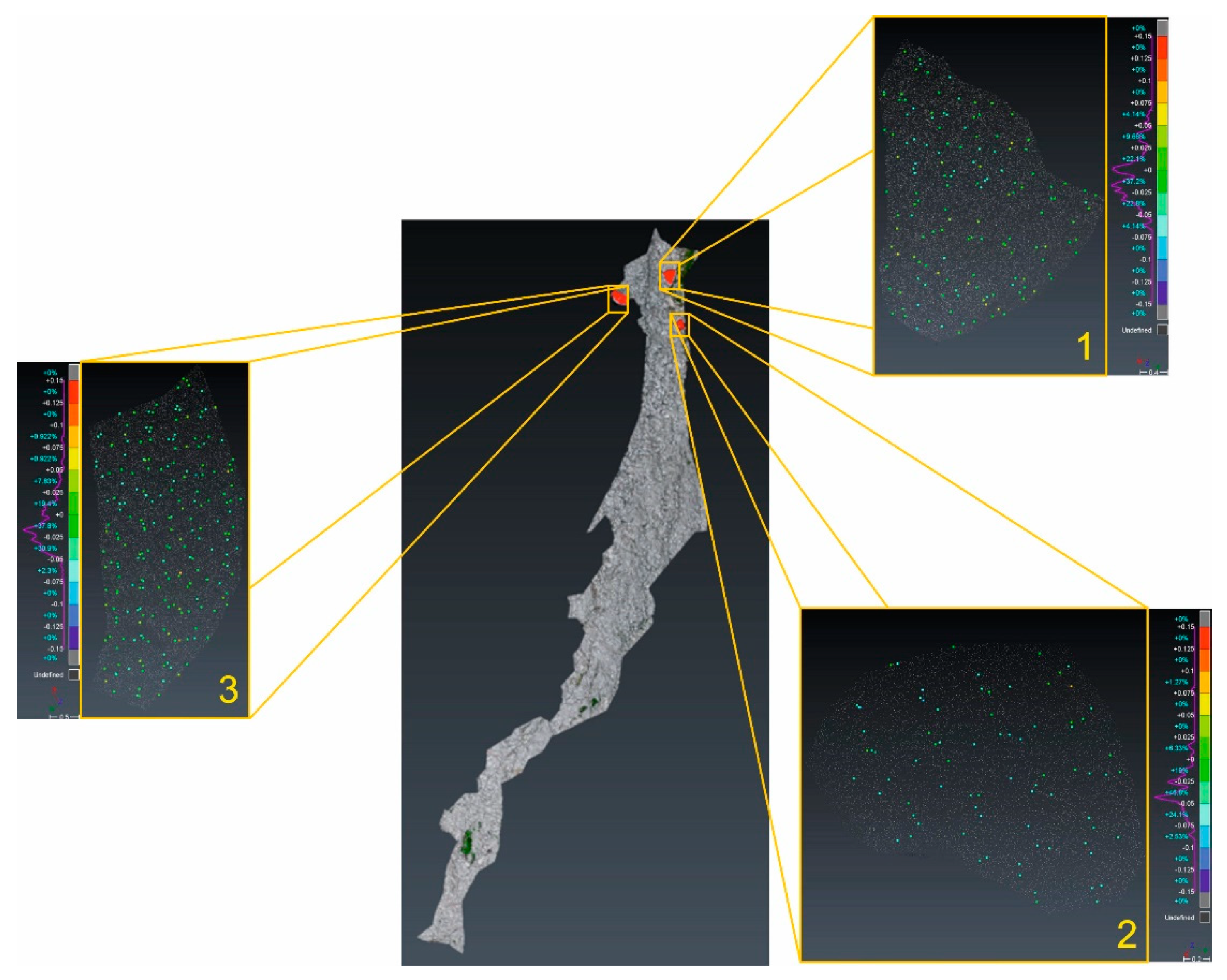
5.2.4. Large Rocks—Boulders
6. Discussion
7. Conclusions
- Our results confirmed the suitability of the ALS method,
- Advantages of ALS are the speed of data collection over a large area at the same time,
- ALS data collection eliminates the need for demanding field data collection in inaccessible locations, hardly accessible and dangerous terrain such as mountain gutters, active talus cones, or in alpine environments, where it is difficult or even impossible to transport geodetic instruments,
- ALS makes it easy to perform repeated measurements or to plan stage surveys at preplanned intervals,
- The main disadvantages of ALS are the lower detail of the DEM and significantly higher financial demands.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sepúlveda, S.A.; Alfaro, A.; Lara, M.; Carrasco, J.; Olea-Encina, P.; Rebolledo, S.; Garcés, M. An active large rock slide in the Andean paraglacial environment: The Yerba Loca landslide, central Chile. Landslides 2020. [Google Scholar] [CrossRef]
- Chang, K.-J.; Tseng, C.-W.; Tseng, C.-M.; Liao, T.-C.; Yang, C.J. Application of Unmanned Aerial Vehicle (UAV)-Acquired Topography for Quantifying Typhoon-Driven Landslide Volume and Its Potential Topographic Impact on Rivers in Mountainous Catchments. Appl. Sci. 2020, 10, 6102. [Google Scholar] [CrossRef]
- Hofierka, J.; Gallay, M.; Bandura, P.; Šašak, J. Identification of karst sinkholes in a forested karst landscape using airborne laser scanning data and water flow analysis. Geomorphology 2018, 308, 265–277. [Google Scholar] [CrossRef]
- Available online: https://www.europeandataportal.eu (accessed on 23 November 2020).
- Moudrý, V.; Urban, R.; Štroner, M.; Komárek, J.; Brouček, J.; Prošek, J. Comparison of a commercial and home-assembled fixed-wing UAV for terrain mapping of a post-mining site under leaf-off conditions. Int. J. Remote Sens. 2019, 40, 555–572. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef]
- Benjamin, A.R.; O’Brien, D.; Barnes, G.; Wilkinson, B.E.; Volkmann, W. Improving data acquisition eficiency: Systematic accuracy evaluation of GNSS-assisted aerial triangulation in UAS operations. J. Surv. Eng. 2020, 146, 1–15. [Google Scholar] [CrossRef]
- Bruggisser, M.; Hollaus, M.; Kükenbrink, D.; Pfeifer, N. Comparison of Forest Structure Metrics Derived from UAS LiDAR and ALS Data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-2/W5, 325–332. [Google Scholar] [CrossRef]
- Zieher, T.; Bremer, M.; Rutzinger, M.; Pfeiffer, J.; Fritzmann, P.; Wichmann, V. Assessment of landslide-induced displacement and deformation of above-ground objects using UAS-borne and airborne laser scanning data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-2/W5, 461–467. [Google Scholar] [CrossRef]
- Thiel, C.; Schmullius, C. Derivation of Forest Parameters from Stereographic UAS Data—A Comparison with Airborne Lidar Data. Available online: https://ui.adsabs.harvard.edu/abs/2016ESASP.740E.189T/abstract (accessed on 5 November 2020).
- Tournadre, V.; Pierrot-Deseilligny, M.; Faure, P.H. UAS Photogrammetry to Monitor Dykes—Calibration and Comparison to Terrestrial Lidar. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-3/W1, 143–148. [Google Scholar] [CrossRef]
- Grohmann, C.H.; Garcia, G.; Affonso, A.A.; Albuquerque, R.W. Dune migration and volume change from airborne LiDAR, terrestrial LiDAR and Structure from Motion-Multi View Stereo. Comput. Geosci. 2020, 143, 104569. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAS Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAS LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef]
- Moe, K.T.; Owari, T.; Furuya, N.; Hiroshima, T. Comparing Individual Tree Height Information Derived from Field Surveys, LiDAR and UAS-DAP for High-Value Timber Species in Northern Japan. Forests 2020, 11, 223. [Google Scholar] [CrossRef]
- Pellicani, R.; Argentiero, I.; Manzari, P.; Spilotro, G.; Marzo, C.; Ermini, R.; Apollonio, C. UAS and Airborne LiDAR Data for Interpreting Kinematic Evolution of Landslide Movements: The Case Study of the Montescaglioso Landslide (Southern Italy). Geosciences 2019, 9, 248. [Google Scholar] [CrossRef]
- Salach, A.; Bakuła, K.; Pilarska, M.; Ostrowski, W.; Górski, K.; Kurczyński, Z. Accuracy Assessment of Point Clouds from LiDAR and Dense Image Matching Acquired Using the UAS Platform for DTM Creation. ISPRS Int. J. Geo-Inf. 2018, 7, 342. [Google Scholar] [CrossRef]
- Borrelli, L.; Conforti, M.; Mercuri, M. LiDAR and UAS System Data to Analyze Recent Morphological Changes of a Small Drainage Basin. ISPRS Int. J. Geo-Inf. 2019, 8, 536. [Google Scholar] [CrossRef]
- Kociuba, W. Different Paths for Developing Terrestrial LiDAR Data for Comparative Analyses of Topographic Surface Changes. Appl. Sci. 2020, 10, 7409. [Google Scholar] [CrossRef]
- Derrien, A.; Villeneuve, N.; Peltier, A.; Beauducel, F. Retrieving 65 years of volcano summit deformation from multitemporal structure from motion: The case of Piton de la Fournaise (La Réunion Island). Geophys. Res. Lett. 2015, 42, 6959–6966. [Google Scholar] [CrossRef]
- Jovančević, S.D.; Peranić, J.; Ružić, I.; Arbanas, Ž. Analysis of a historical landslide in the Rječina River Valley, Croatia. Geoenviron. Disasters 2016. [Google Scholar] [CrossRef]
- Rossi, G.; Tanteri, L.; Tofani, V.; Vannocci, P. Multitemporal UAS surveys for landslide mapping and characterization. Landslides 2018, 15, 1045. [Google Scholar] [CrossRef]
- Ridolfi, E.; Buffi, G.; Venturi, S.; Manciola, P. accuracy analysis of a dam model from drone surveys. Sensors 2017, 17, 1777. [Google Scholar] [CrossRef] [PubMed]
- Buffi, G.; Manciola, P.; Grassi, S.; Barberini, M.; Gambi, A. Survey of the Ridracoli Dam: UAS–based photogrammetry and traditional topographic techniques in the inspection of vertical structures. Geomat. Nat. Hazards Risk 2017, 1562–1579. [Google Scholar] [CrossRef]
- Duró, G.; Crosato, A.; Kleinhans, M.G.; Uijttewaal, W.S.J. Bank erosion processes measured with UAS-SfM along complex banklines of a straight mid-sized river reach. Earth Surf. Dyn. 2018, 6, 933–953. [Google Scholar] [CrossRef]
- Peppa, M.V.; Mills, J.P.; Moore, P.; Miller, P.E.; Chambers, J.E. Brief communication: Landslide motion from cross correlation of UAS-derived morphological attributes. Nat. Hazards Earth Syst. Sci. 2017, 17, 2143–2150. [Google Scholar] [CrossRef]
- Salvini, R.; Mastrorocco, G.; Esposito, G.; Di Bartolo, S.; Coggan, J.; Vanneschi, C. Use of a remotely piloted aircraft system for hazard assessment in a rocky mining area (Lucca, Italy). Nat. Hazards Earth Syst. Sci. 2018, 18, 287–302. [Google Scholar] [CrossRef]
- Car, M.; JurićKaćunić, D.; Kovačević, M.S. Application of Unmanned Aerial Vehicle for Landslide Mapping. In Proceedings of the International Symposiun on Engineering Geodesy—SIG 2016, Varaždin, Croatia, 20–22 May 2016; pp. 549–559. [Google Scholar]
- Kaufmann, V.; Seier, G.; Sulzer, W.; Wecht, M.; Liu, Q.; Lauk, G.; Maurer, M. Rock Glacier Monitoring Using Aerial Photographs: Conventional vs. UAS-Based Mapping—A Comparative Study. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2018, XLII-1, 239–246. [Google Scholar] [CrossRef]
- Vivero, S.; Lambiel, C.H. Monitoring the crisis of a rock glacier with repeated UAS surveys. Geogr. Helv. 2019, 74, 59–69. [Google Scholar] [CrossRef]
- Blišťan, P.; Kovanič, Ľ.; Zelizňaková, V.; Palková, J. Using UAS photogrammetry to document rock outcrops. Acta Montan. Slovaca 2016, 21, 154–161. [Google Scholar]
- Moudry, V.; Gdulova, K.; Fogl, M.; Klapste, P.; Urban, R.; Komarek, J.; Moudra, L.; Štroner, M.; Bartak, V.; Solsky, M. Comparison of leaf-off and leaf-on combined UAS imagery and airborne LiDAR for assessment of a post-mining site terrain and vegetation structure: Prospects for monitoring hazards and restoration success. Appl. Geogr. 2019, 104, 32–41. [Google Scholar] [CrossRef]
- Westoby, M.; Lim, M.; Hogg, M.; Dunlop, L.; Pound, M.; Strzelecki, M.; Woodward, J. Decoding Complex Erosion Responses for the Mitigation of Coastal Rockfall Hazards Using Repeat Terrestrial LiDAR. Remote Sens. 2020, 12, 2620. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-E_ective Non-Metric Photogrammetry from Consumer-Grade Suas: Implications for Direct Geo-referencing of Structure from Motion Photogrammetry. Earth Surf. Process. Landf. 2017, 42, 473–486. [Google Scholar] [CrossRef]
- Szczygieł, J.; Golicz, M.; Hercman, H.; Lynch, E. Geological constraints on cave development in the plateau-gorge karst of South China (Wulong, Chongqing). Geomorphology 2018, 304, 50–63. [Google Scholar] [CrossRef]
- Pukanská, K.; Bartoš, K.; Bella, P.; Gašinec, J.; Blistan, P.; Kovanič, Ľ. Surveying and high-resolution topography of the ochtiná aragonite cave based on tls and digital photogrammetry. Appl. Sci. 2020, 10, 4633. [Google Scholar] [CrossRef]
- Vanneschi, C.; Di Camillo, M.; Aiello, E.; Bonciani, F.; Salvini, R. SfM-MVS Photogrammetry for Rockfall Analysis and Hazard Assessment Along the Ancient Roman via Flaminia Road at the Furlo Gorge (Italy). ISPRS Int. J. Geo-Inf. 2019, 8, 325. [Google Scholar] [CrossRef]
- Urban, R.; Štroner, M.; Blistan, P.; Kovanič, Ľ.; Patera, M.; Jacko, S.; Ďuriška, I.; Kelemen, M.; Szabo, S. The Suitability of UAS for Mass Movement Monitoring Caused by Torrential Rainfall—A Study on the Talus Cones in the Alpine Terrain in High Tatras, Slovakia. ISPRS Int. J. Geo-Inf. 2019, 8, 317. [Google Scholar] [CrossRef]
- Available online: https://www.geoportal.sk/sk/udaje/lls-dmr/o-projekte/ (accessed on 12 February 2020).
- Mazúr, E.; Lukniš, M. Regionálne Geomorfologické Členenie SSR. 1978. Available online: https://fns.uniba.sk/fileadmin/prif/geog/kfg/Studium/predmety_1._stupen/geomorfoskripta_len_lit/PrilohaC_geomorfol_clen_slov.pdf (accessed on 5 November 2020).
- Černík, A.; Sekyra, J. Zeměpis Velehor; Academia: Praha, Czech Republic, 1969; 396p. [Google Scholar]
- Midriak, R. Morfogenéza Povrchu Vysokých Pohorí; VEDA: Bratislava, Slovakia, 1983; 516p. [Google Scholar]
- Krsak, B.; Blistan, P.; Paulikova, A.; Puskarova, P.; Kovanic, L.; Palkova, J.; Zeliznakova, V. Use of low-cost UAV photogrammetry to analyze the accuracy of a digital elevation model in a case study. Measurement 2016, 91, 276–287. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Blišťan, P.; Zelizňaková, V.; Palková, J. Surveying of open pit mine using low-cost aerial photogrammetry. In Lecture Notes in Geoinformation and Cartography; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Blistan, P.; Kovanic, L.; Patera, M.; Hurcik, T. Evaluation quality parameters of DEM generated with low-cost UAS photogrammetry and Structure-from-Motion (SfM) approach for topographic surveying of small areas. Acta Montan. Slovaca 2019, 24, 198–212. [Google Scholar]
- Ćwiąkała, P.; Gruszczyński, W.; Stoch, T.; Puniach, E.; Mrocheń, D.; Matwij, W.; Matwij, K.; Nędzka, M.; Sopata, P.; Wójcik, A. UAV Applications for Determination of Land Deformations Caused by Underground Mining. Remote Sens. 2020, 12, 1733. [Google Scholar] [CrossRef]
- Fraštia, M.; Liščák, P.; Žilka, A.; Pauditš, P.; Bobáľ, P.; Hronček, S.; Sipina, S.; Ihring, P.; Marčiš, M. Mapping of debris flows by the morphometric analysis of DTM: A case study of the Vrátna dolina Valley, Slovakia. Geogr. Časopis 2019, 71, 101–120. [Google Scholar] [CrossRef]
- Siwiec, J. Comparison of Airborne Laser Scanning of Low and High Above Ground Level for Selected Infrastructure Objects. J. Appl. Eng. Sci. 2018, 8, 89–96. [Google Scholar] [CrossRef]
- Šašak, J.; Gallay, M.; Kaňuk, J.; Hofierka, J.; Minár, J. Combined Use of Terrestrial Laser Scanning and UAV Photogrammetry in Mapping Alpine Terrain. Remote Sens. 2019, 11, 2154. [Google Scholar] [CrossRef]
- Blišťan, P.; Jacko, S.; Kovanič, Ľ.; Kondela, J.; Pukanská, K.; Bartoš, K. TLS and SfM approach for bulk density determination of excavated heterogeneous raw materials. Minerals 2020, 10, 174. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle measurement (Hz, V) | |
| Accuracy | 7″ |
| Distance measurement with a prism | |
| Range | 3500 m |
| Accuracy | 1.5 mm + 2.0 ppm |
| Distance measurement without a prism | |
| Range | >400 m |
| Accuracy | 2 mm + 2 ppm |
| Main Characteristics | |
| Type | Time-of-flight laser scanner |
| Range and reflectivity | Minimum 0.4 m, 270 m@34%; 120 m@8% |
| Scan rate | Up to 1,000,000 points per sec |
| Field of view | H—360° (max.); V—290° (max.) |
| Accuracy | |
| Distance measurement | 1.2 mm + 10 ppm |
| Angular measurement | 8″ horizontal; 8″ vertical |
| 3D position | 3 mm at 50 m; 6 mm at 100 m |
| Target acquisition | 2 mm standard deviation at 50 m |
| Aircraft | |
|---|---|
| Weight (with Battery and Propellers): | 1380 g |
| Max Ascent/Descent Speed: | 6 m/s/4 m/s |
| Max Flight Speed: | 20 m/s |
| Max. flight time: | 28 min. |
| Satellite positioning system | GPS/GLONASS |
| Wind speed resistance | 10 m/s |
| Camera | |
| Operating Environment Temperature: | 0–40 °C |
| Sensor: | 1″ CMOS |
| Effective Pixels: | 20 Megapixels |
| Image size: | 4864 pixels × 3648 pixels (4:3) |
| Gimbal pitch | −90 to + 30° |
| Battery | |
| Type | Li-Pol |
| Capacity | 5870 mAh |
| Voltage | 15.2 V |
| Dataset | Total Count of Points in the Raw Point Cloud | Count of Points in the Reduced Point Cloud | Average Point Cloud Density (point/m2) | Average Resolution of Point Cloud (m) | Spatial Sampling Resolution of Point Cloud (m) |
|---|---|---|---|---|---|
| TLS | 505,000,000 | 5,486,311 | 1157 | 0.029 | 0.010 |
| UAS | 261,000,000 | 14,222,293 | 3000 | 0.018 | 0.010 |
| ALS | 190,000 | 82,764 | 17 | 0.243 | 0.150 |
| Area (m2) | UAS Points | TLS Points | Mean (m) | Abs Max (m) | Std. Dev. (m) | |
|---|---|---|---|---|---|---|
| Whole area | 4400 | 14,222,293 | 5,486,311 | −0.006 | 0.586 | 0.020 |
| Vegetation-free | 66 | 205,699 | 86,771 | −0.006 | 0.149 | 0.022 |
| Boulder | 6 | 22,766 | 19,180 | −0.006 | 0.030 | 0.018 |
| Area (m2) | UAS Points | ALS Points | Mean (m) | Abs Max (m) | Std. Dev. (m) | |
|---|---|---|---|---|---|---|
| Whole area | 4400 | 14,222,293 | 82,764 | 0.001 | 0.741 | 0.046 |
| Vegetation free | 1727 | 6,441,540 | 31,404 | 0.001 | 0.495 | 0.032 |
| Area | Area (m2) | UAS Points | ALS Points | Mean (m) | Abs Max (m) | Std. Dev. (m) |
|---|---|---|---|---|---|---|
| 1 | 66 | 205,699 | 842 | 0.015 | 0.178 | 0.033 |
| 2 | 47 | 149,748 | 862 | 0.016 | 0.155 | 0.033 |
| 3 | 42 | 114,623 | 901 | 0.017 | 0.114 | 0.033 |
| Boulder | Area (m2) | UAS Points | ALS Points | Mean (m) | Abs Max (m) | Std. Dev. (m) |
|---|---|---|---|---|---|---|
| 1 | 12 | 22,766 | 154 | 0.015 | 0.100 | 0.022 |
| 2 | 6 | 7712 | 85 | 0.029 | 0.106 | 0.026 |
| 3 | 15 | 27,003 | 217 | 0.010 | 0.109 | 0.019 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovanič, Ľ.; Blistan, P.; Urban, R.; Štroner, M.; Blišťanová, M.; Bartoš, K.; Pukanská, K. Analysis of the Suitability of High-Resolution DEM Obtained Using ALS and UAS (SfM) for the Identification of Changes and Monitoring the Development of Selected Geohazards in the Alpine Environment—A Case Study in High Tatras, Slovakia. Remote Sens. 2020, 12, 3901. https://doi.org/10.3390/rs12233901
Kovanič Ľ, Blistan P, Urban R, Štroner M, Blišťanová M, Bartoš K, Pukanská K. Analysis of the Suitability of High-Resolution DEM Obtained Using ALS and UAS (SfM) for the Identification of Changes and Monitoring the Development of Selected Geohazards in the Alpine Environment—A Case Study in High Tatras, Slovakia. Remote Sensing. 2020; 12(23):3901. https://doi.org/10.3390/rs12233901
Chicago/Turabian StyleKovanič, Ľudovít, Peter Blistan, Rudolf Urban, Martin Štroner, Monika Blišťanová, Karol Bartoš, and Katarína Pukanská. 2020. "Analysis of the Suitability of High-Resolution DEM Obtained Using ALS and UAS (SfM) for the Identification of Changes and Monitoring the Development of Selected Geohazards in the Alpine Environment—A Case Study in High Tatras, Slovakia" Remote Sensing 12, no. 23: 3901. https://doi.org/10.3390/rs12233901
APA StyleKovanič, Ľ., Blistan, P., Urban, R., Štroner, M., Blišťanová, M., Bartoš, K., & Pukanská, K. (2020). Analysis of the Suitability of High-Resolution DEM Obtained Using ALS and UAS (SfM) for the Identification of Changes and Monitoring the Development of Selected Geohazards in the Alpine Environment—A Case Study in High Tatras, Slovakia. Remote Sensing, 12(23), 3901. https://doi.org/10.3390/rs12233901