Integrated GNSS/IMU-Gyrocompass with Rotating IMU. Development and Test Results

 ,
,
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
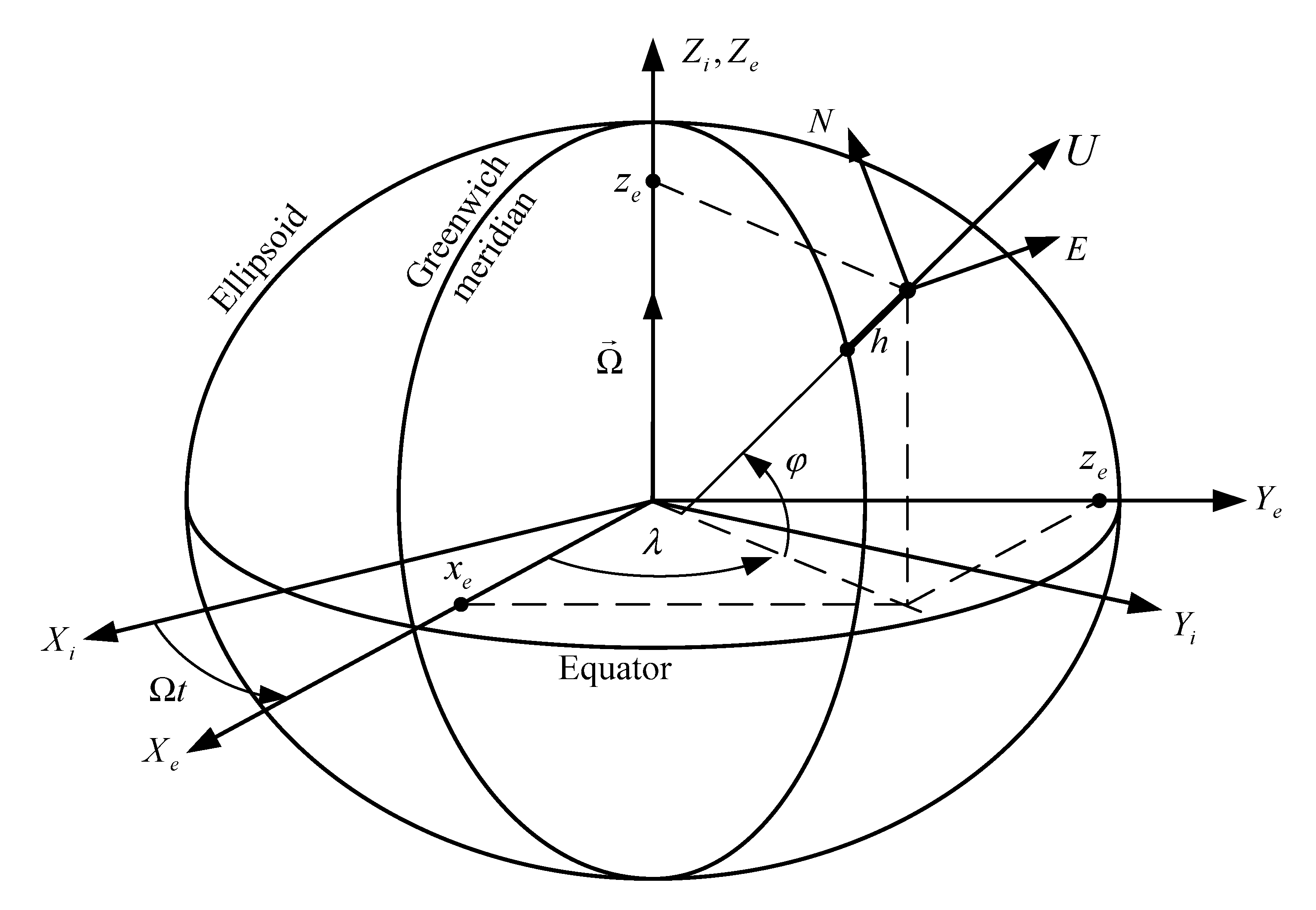
2. Reference Frame Definitions and Main Notations
- —inertial frame (i-frame);
- —Earth-Centered-Earth-Fixed Frame (e-frame);
- —n-frame, a local geographic frame (eastward-northward-upward);
- —b-frame bound with the integrated GNSS/IMU gyrocompass body;
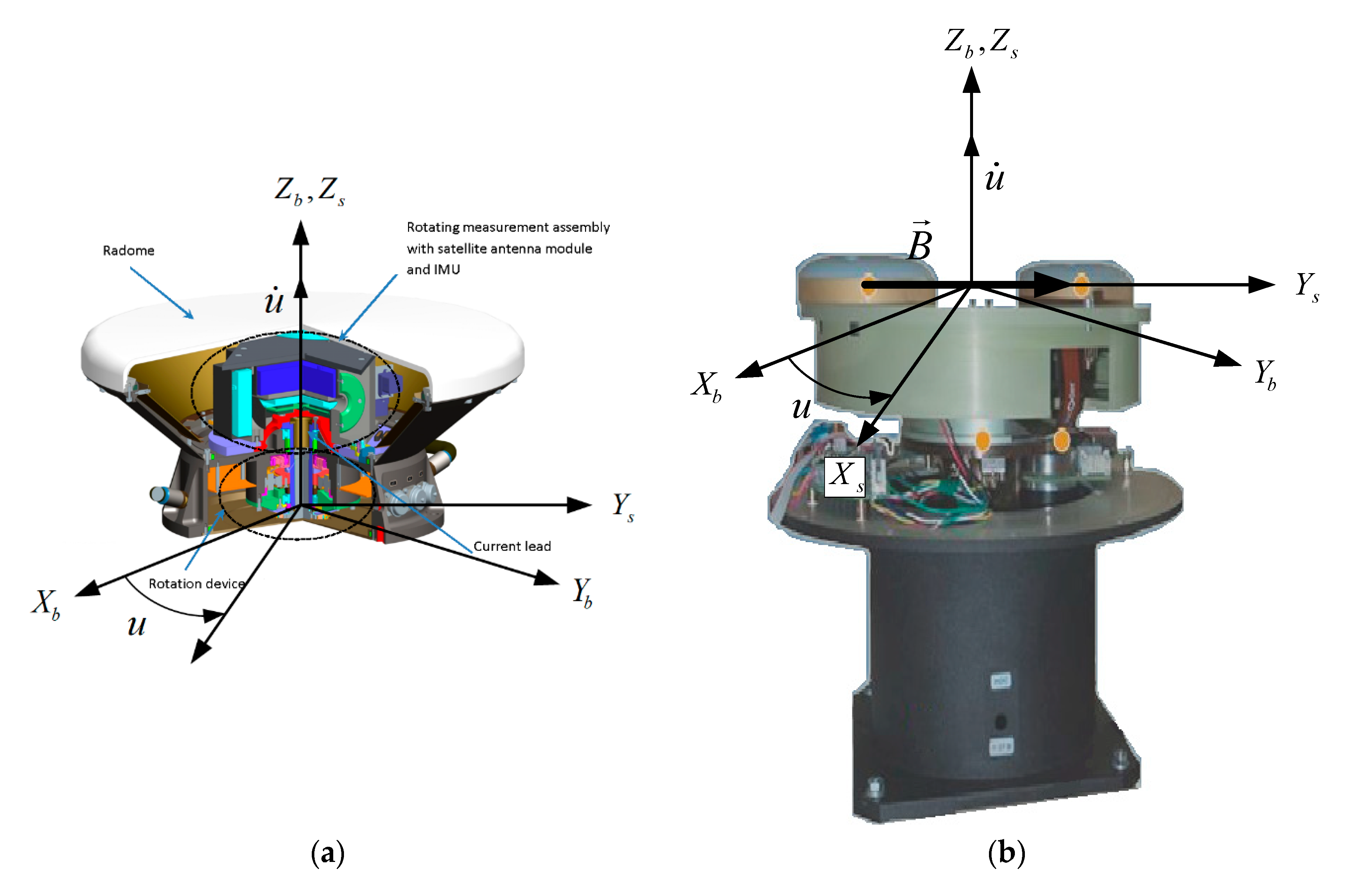
- —s-frame bound with the antenna baseline and measurement axes of accelerometers and gyros, with the antenna baseline oriented along axis (Figure 3), s-frame rotates with respect to b-frame about axis coinciding with axis at angular velocity .
3. Materials
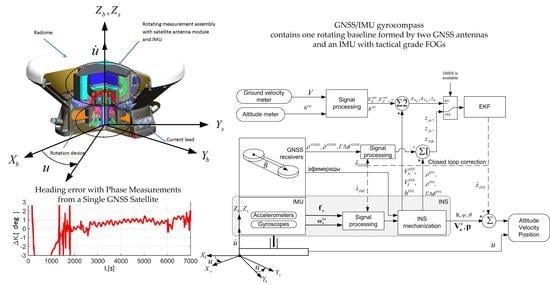
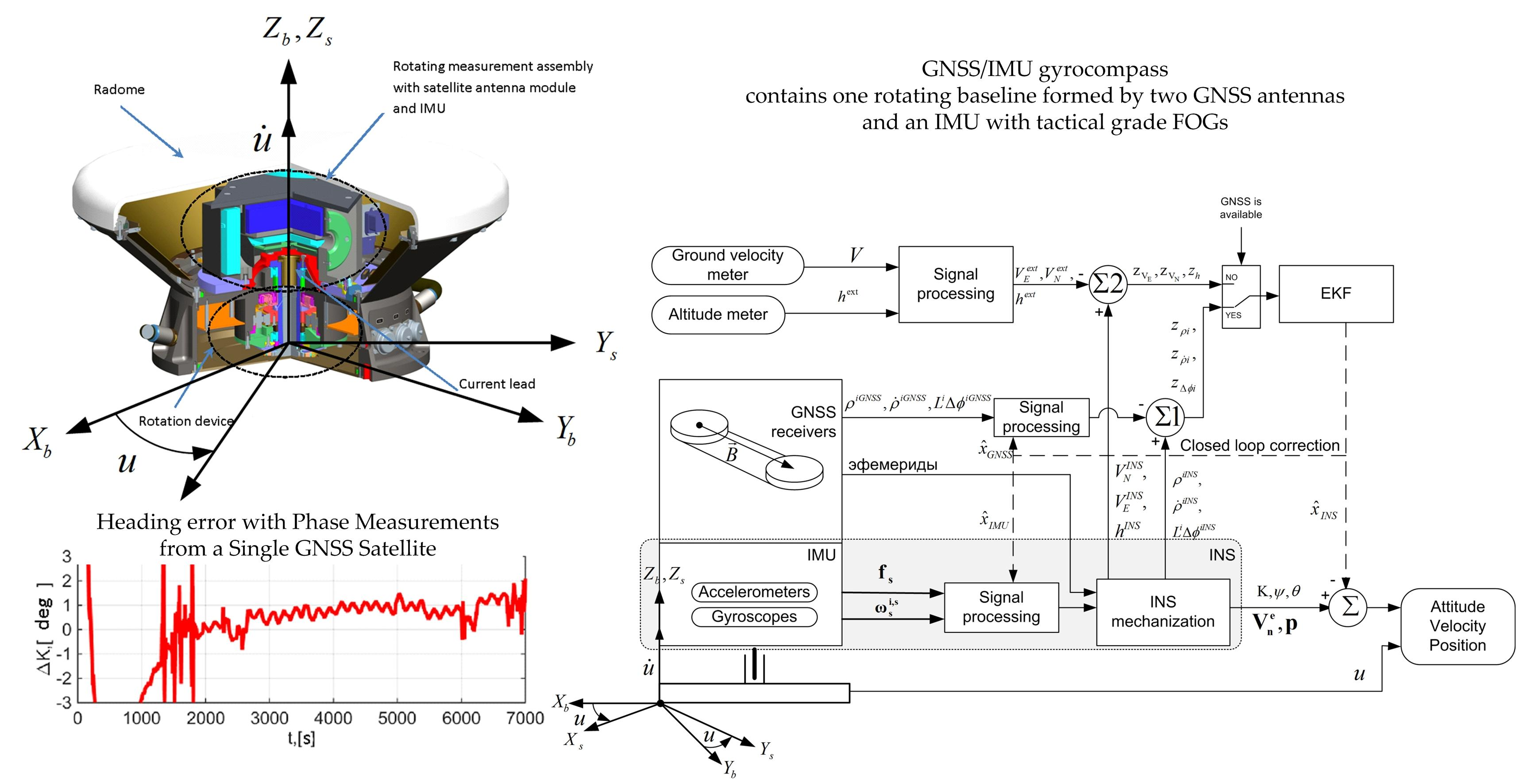
3.1. Integrated GNSS/IMU Gyrocompass Structure and Features
3.2. Description of Prototype Model
- Compact GNSS compass with two GLONASS/GPS satellite receivers with a common clock and antenna baseline of about 0.18 m forcedly rotated by the electric drive by the harmonic law with the angle amplitude of 180° (position 1 in Figure 4);
- IMU on tactical grade FOGs (with drift level of 30°/h) and accelerometers (bias instability of 1 mg), forcedly rotated by electric drive by harmonic law with the angle amplitude of 180° (position 2 in Figure 4).
4. Methods
4.1. INS Error Model
4.2. Error Model of Inertial Sensors
4.3. Models of Satellite Signals and Their Errors
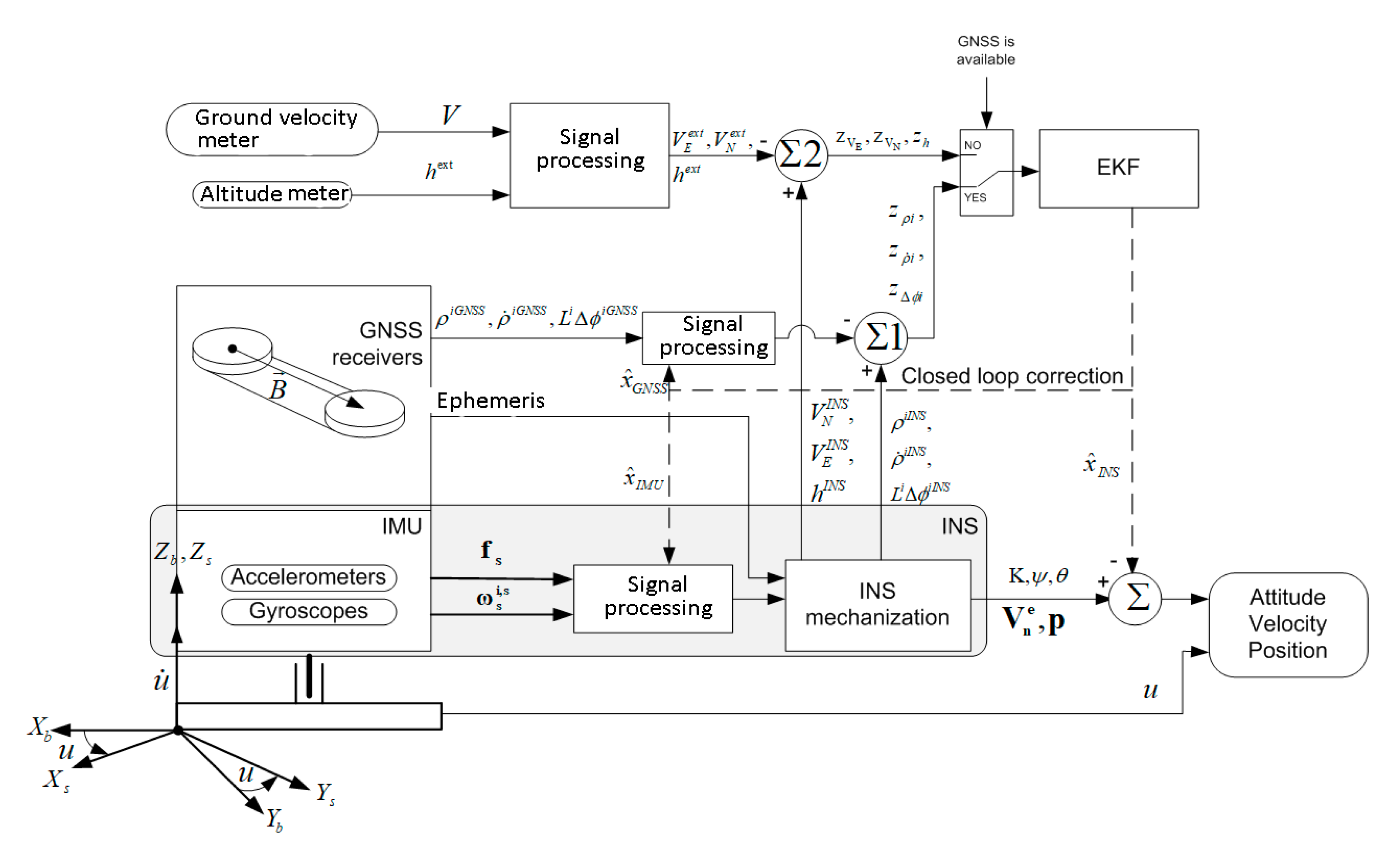
4.4. Filtering Algorithms Used for GNSS/IMU Gyrocompass Measurements
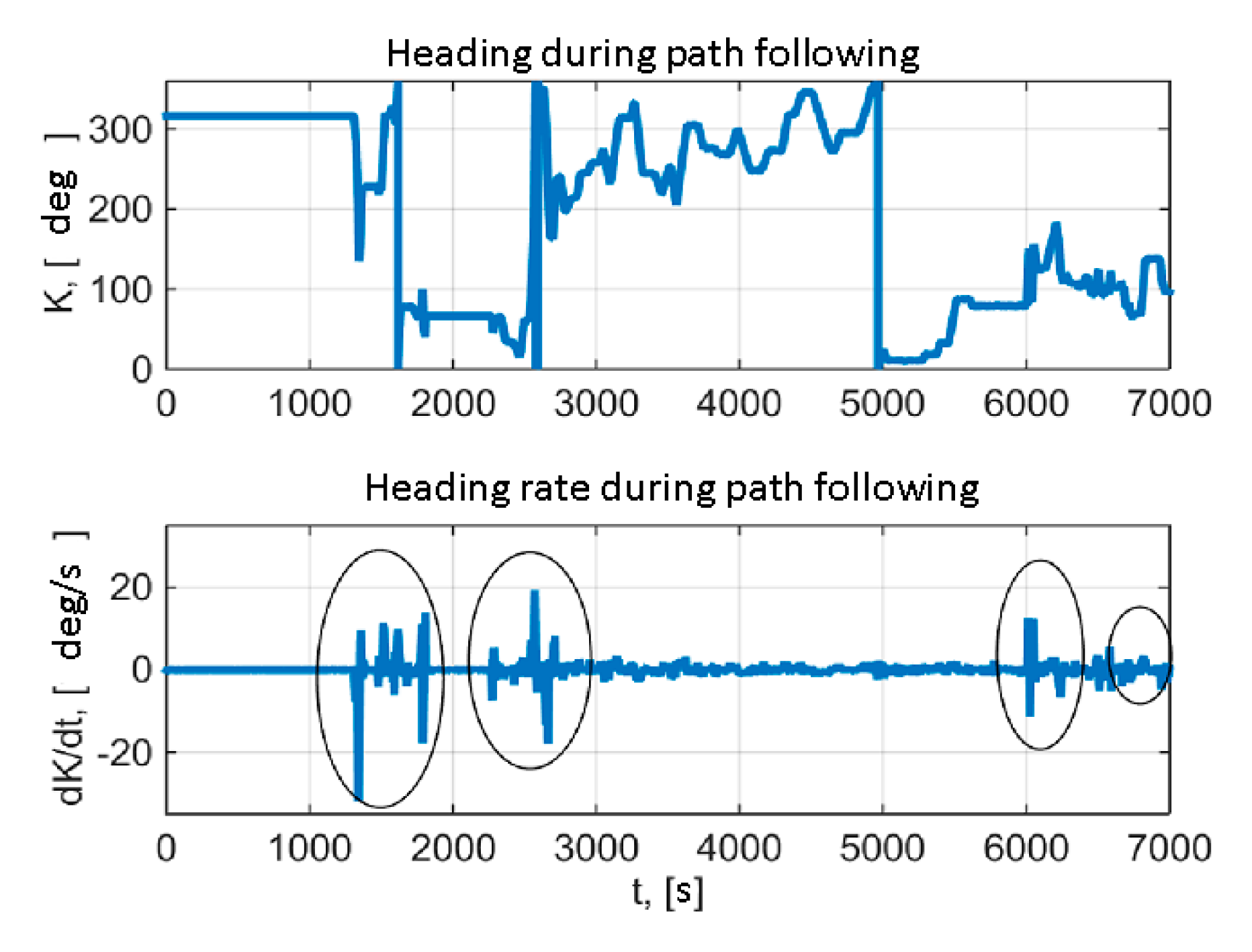
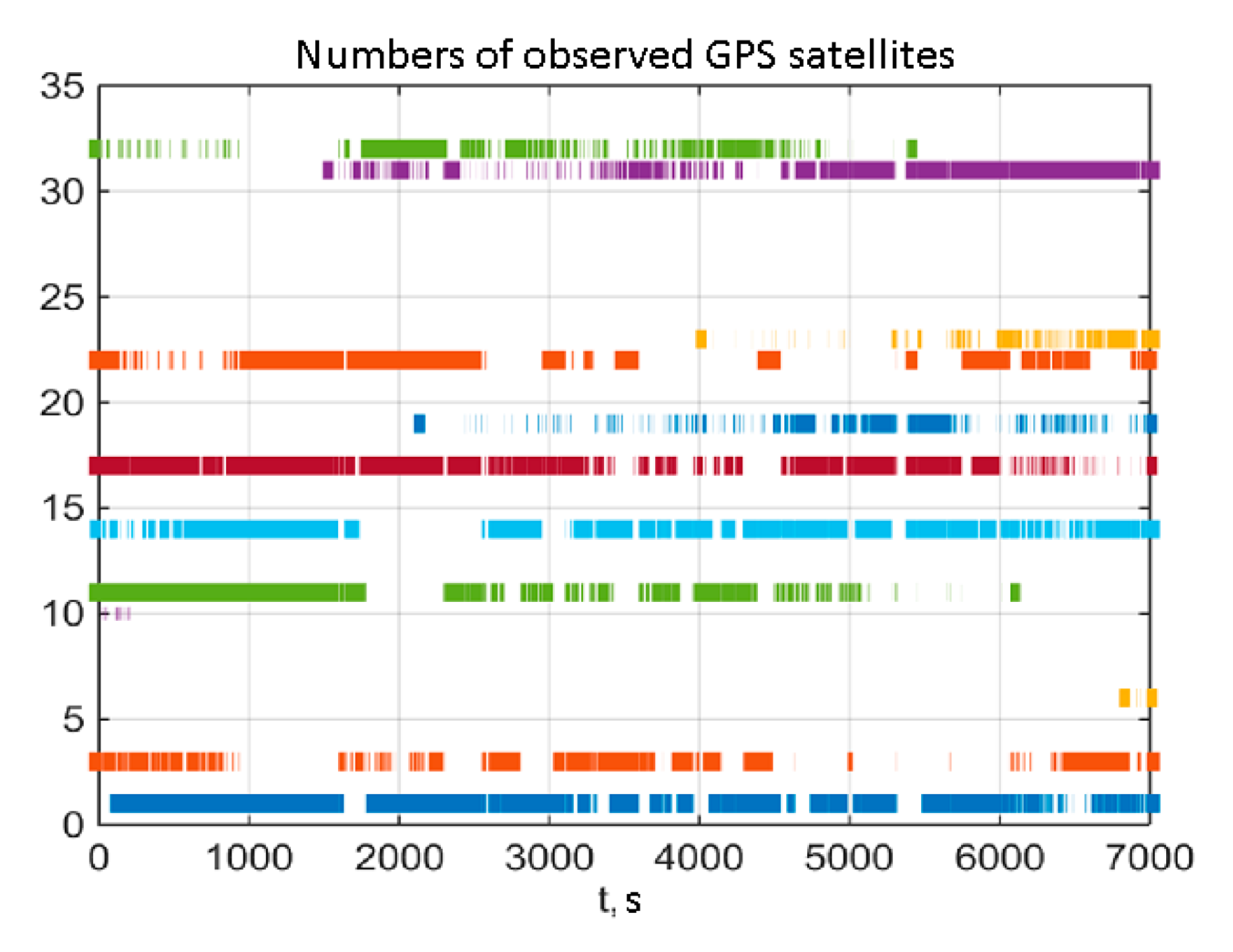
5. Results
5.1. Results with Phase Measurment Signals from Multiple Satellites
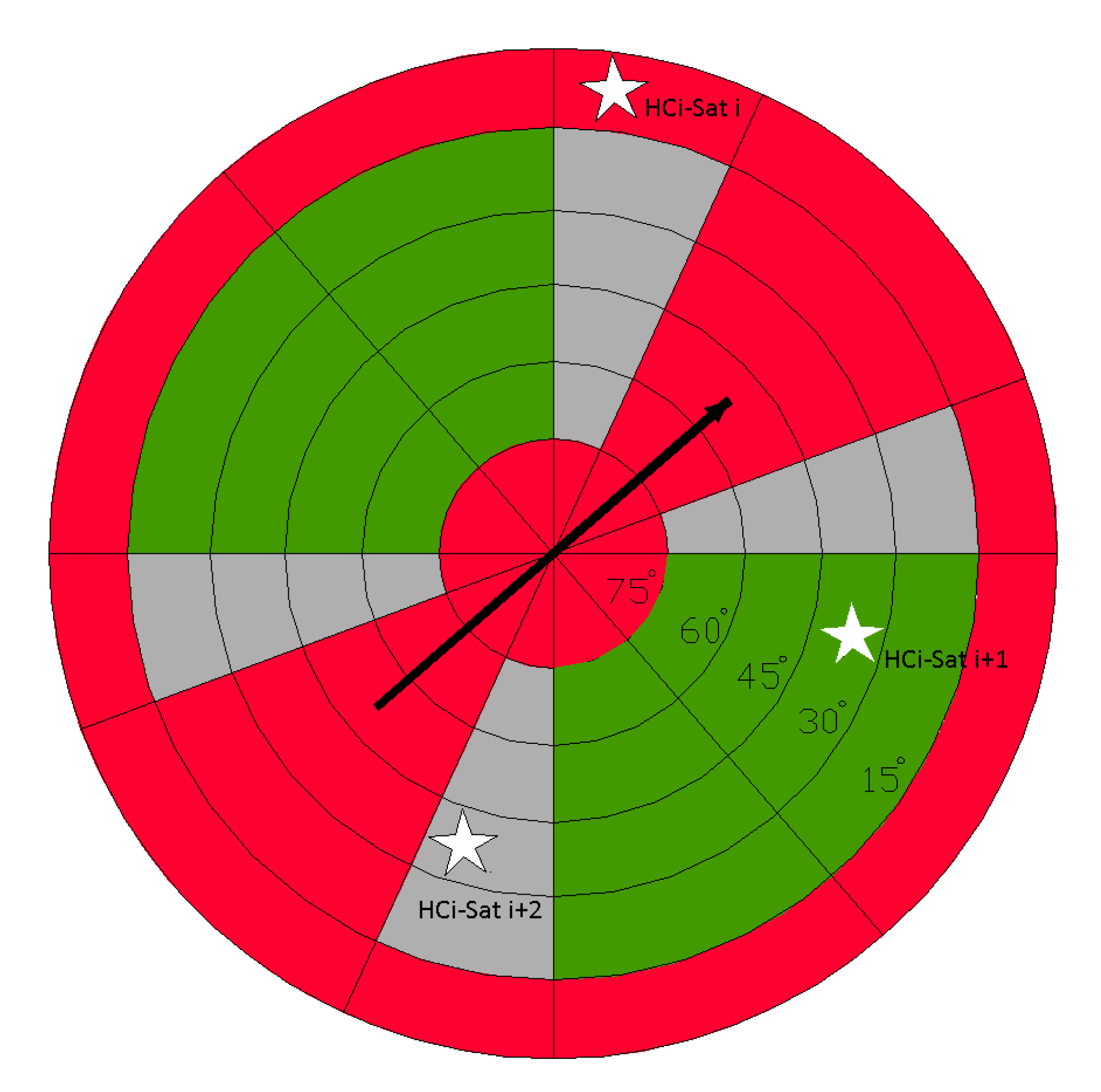
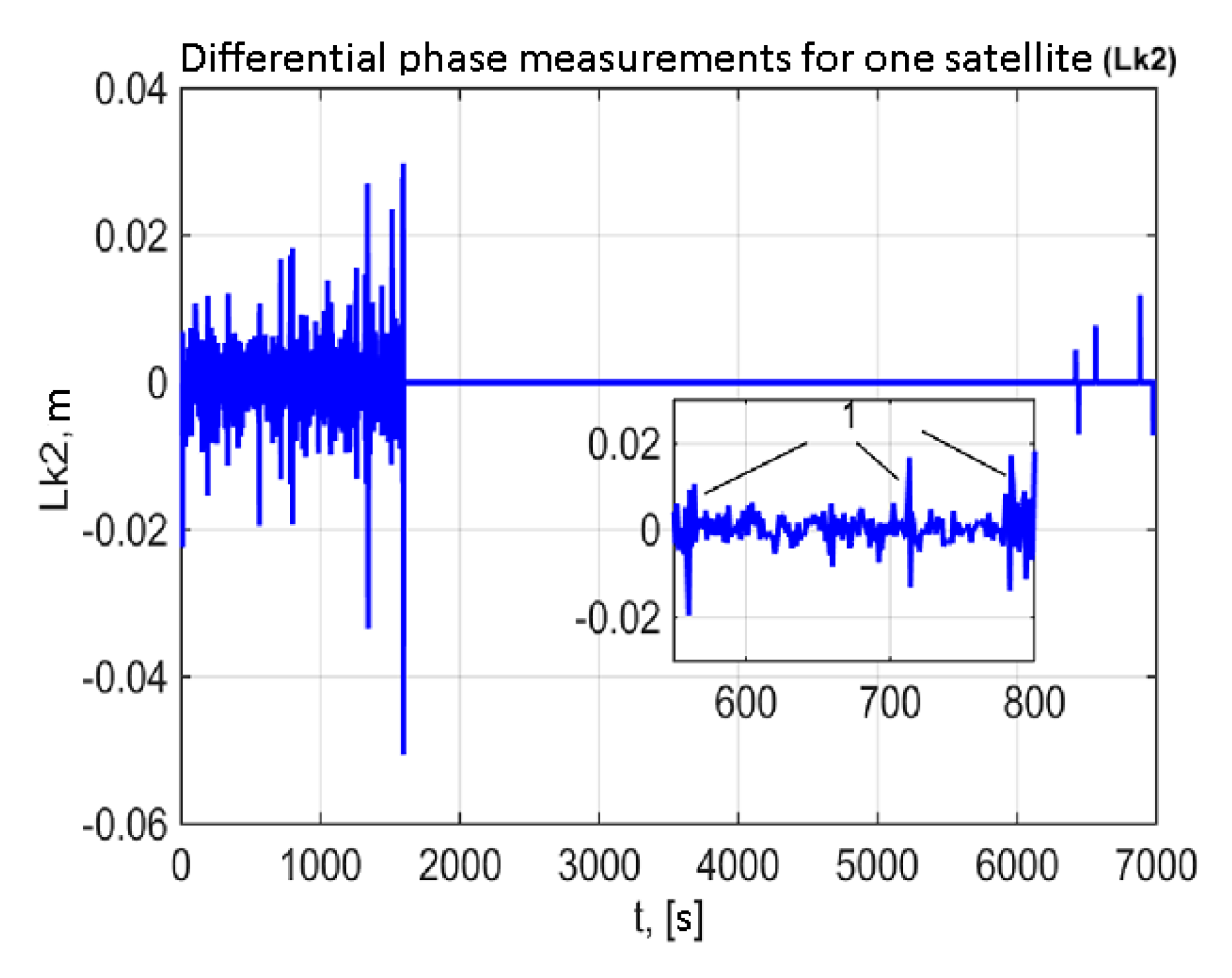
5.2. Results with Phase Measurements from a Single Satellite
5.3. Results with Complete GNSS Signal Outage
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fourati, H.; Belkhiat, D.E.C. Devices, circuits, and systems. In Multisensor Attitude Estimation: Fundamental Concepts and Applications; Fourati, H., Belkhiat, D.E.C., Eds.; CRC Press: Boca Raton, FL, USA, 2017; ISBN 978-1-4987-4571-0. [Google Scholar]
- Chiang, K.-W.; Tsai, G.-J.; Li, Y.-H.; Li, Y.; El-Sheimy, N. Navigation engine design for automated driving using INS/GNSS/3D LiDAR-SLAM and integrity assessment. Remote Sens. 2020, 12, 1564. [Google Scholar] [CrossRef]
- Li, Y.; Efatmaneshnik, M.; Dempster, A.G. Attitude determination by integration of MEMS inertial sensors and GPS for autonomous agriculture applications. GPS Solut. 2012, 16, 41–52. [Google Scholar] [CrossRef]
- Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An integrated GNSS/INS/LiDAR-SLAM positioning method for highly accurate forest stem mapping. Remote Sens. 2016, 9, 3. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. IEE radar, sonar, navigation, and avionics series. Strapdown Inertial Navigation Technology, 2nd ed.; Institution of Electrical Engineers: Stevenage, UK, 2004; ISBN 978-0-86341-358-2. [Google Scholar]
- Grewal, M.S.; Andrews, A.P.; Bartone, C. Global Navigation Satellite Systems, Inertial Navigation, and Integration, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2013; ISBN 978-1-118-44700-0. [Google Scholar]
- Groves, P.D. GNSS technology and application series. In Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Boston, MA, USA, 2013; ISBN 978-1-60807-005-3. [Google Scholar]
- Teunissen, P.J.G. Integer least-squares theory for the GNSS compass. J. Geod. 2010, 84, 433–447. [Google Scholar] [CrossRef]
- Emel’yantsev, G.I.; Stepanov, A.P. Integrirovannye inertsial’no-sputnikovye sistemy orientatsii i navigatsii (Integrated INS/GNSS Attitude Reference and Navigation Systems); Kontsern TsNII Elektropribor: St. Petersburg, Russia, 2016; ISBN 978-5-91995-029-5. [Google Scholar]
- Teunissen, P.J.G.; Giorgi, G.; Buist, P.J. Testing of a new single-frequency GNSS carrier phase attitude determination method: Land, ship and aircraft experiments. GPS Solut. 2011, 15, 15–28. [Google Scholar] [CrossRef]
- Koshaev, D.A. GNSS-based heading determination under satellite restricted visibility with a static baseline. Gyroscopy Navig. 2013, 4, 120–129. [Google Scholar] [CrossRef]
- Aleshechkin, A.M. Algorithm of GNSS-based attitude determination. Gyroscopy Navig. 2011, 2, 269–276. [Google Scholar] [CrossRef]
- Nadarajah, N.; Teunissen, P.J.G.; Raziq, N. Instantaneous GPS-galileo attitude determination: Single-frequency performance in satellite-deprived environments. IEEE Trans. Veh. Technol. 2013, 62, 2963–2976. [Google Scholar] [CrossRef]
- Jaskólski, K.; Felski, A.; Piskur, P. The compass error comparison of an onboard standard gyrocompass, fiber-optic gyrocompass (FOG) and satellite compass. Sensors 2019, 19, 1942. [Google Scholar] [CrossRef]
- Moradi, R.; Schuster, W.; Feng, S.; Jokinen, A.; Ochieng, W. The carrier-multipath observable: A new carrier-phase multipath mitigation technique. GPS Solut. 2015, 19, 73–82. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhang, H.; Li, Y.; Li, Z. An adaptive low-cost GNSS/MEMS-IMU tightly-coupled integration system with aiding measurement in a GNSS signal-challenged environment. Sensors 2015, 15, 23953–23982. [Google Scholar] [CrossRef] [PubMed]
- Oh, T.; Chung, M.J.; Myung, H. Accurate localization in urban environments using fault detection of gps and multi-sensor fusion. In Robot Intelligence Technology and Applications 4; Kim, J.-H., Karray, F., Jo, J., Sincak, P., Myung, H., Eds.; Springer International Publishing: Cham, Switzerland, 2017; Volume 447, pp. 43–53. ISBN 978-3-319-31291-0. [Google Scholar]
- Daneshmand, S.; Lachapelle, G. Integration of GNSS and INS with a phased array antenna. GPS Solut. 2018, 22, 3. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Gao, Z.; Niu, X.; El-sheimy, N. Tight fusion of a monocular camera, MEMS-IMU, and single-frequency multi-GNSS RTK for precise navigation in GNSS-challenged environments. Remote Sens. 2019, 11, 610. [Google Scholar] [CrossRef]
- Hirokawa, R.; Takuji, E. A low-cost tightly coupled GPS/INS for small UAVs augmented with multiple GPS Antennas. Navig. J. Inst. Navig. 2009, 56, 35–44. [Google Scholar] [CrossRef]
- Ishibashi, S.; Tsukioka, S.; Yoshida, H.; Hyakudome, T.; Sawa, T.; Tahara, J.; Aoki, T.; Ishikawa, A. Accuracy Improvement of an Inertial Navigation System Brought about by the Rotational Motion. In Proceedings of the IEEE OCEANS 2007-Europe, Aberdeen, Scotland, 18–21 June 2007; pp. 1–5. [Google Scholar]
- Kang, L.; Ye, L.; Song, K.; Zhou, Y. Attitude heading reference system using MEMS inertial sensors with dual-axis rotation. Sensors 2014, 14, 18075–18095. [Google Scholar] [CrossRef]
- Stepanov, A.P.; Emel’yantsev, G.I.; Blazhnov, B.A. On the effectiveness of rotation of the inertial measurement unit of a FOG-based platformless ins for marine applications. Gyroscopy Navig. 2016, 7, 128–136. [Google Scholar] [CrossRef]
- Liang, Q.; Litvinenko, Y.A.; Stepanov, O.A. Method of processing the measurements from two units of micromechanical gyroscopes for solving the orientation problem. Gyroscopy Navig. 2018, 9, 233–242. [Google Scholar] [CrossRef]
- Liang, Q.; Litvinenko, Y.A.; Stepanov, O.A. A solution to the attitude problem using two rotation units of micromechanical gyroscopes. IEEE Trans. Ind. Electron. 2020, 67, 1357–1365. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Xiao, G.; Li, P.; Gao, Y.; Heck, B. A Unified model for multi-frequency PPP ambiguity resolution and test results with Galileo and BeiDou triple-frequency observations. Remote Sens. 2019, 11, 116. [Google Scholar] [CrossRef]
- He, H.; Li, J.; Yang, Y.; Xu, J.; Guo, H.; Wang, A. Performance assessment of single- and dual-frequency BeiDou/GPS single-epoch kinematic positioning. GPS Solut. 2014, 18, 393–403. [Google Scholar] [CrossRef]
- Gao, Z.; Shen, W.; Zhang, H.; Ge, M.; Niu, X. Application of helmert variance component based adaptive Kalman filter in multi-GNSS PPP/INS tightly coupled integration. Remote Sens. 2016, 8, 553. [Google Scholar] [CrossRef]
- Emel’yantsev, G.I.; Stepanov, A.P.; Dranitsyna, E.V.; Blazhnov, B.A.; Radchenko, D.A.; Vinokurov, I.Y.; Eliseev, D.P.; Petrov, P.Y. Dual-Mode GNSS Gyrocompass Using Primary Satellite Measurements. In Proceedings of the 25th IEEE Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, Russia, 28–30 May 2018; pp. 1–3. [Google Scholar]
- Emel’yantsev, G.; Dranitsyna, E.; Stepanov, A.; Blazhnov, B.; Vinokurov, I.; Kostin, P.; Petrov, P.; Radchenko, D. Tightly-Coupled GNSS-Aided Inertial System with Modulation Rotation of Two-Antenna Measurement Unit. In Proceedings of the IEEE 2017 DGON Inertial Sensors and Systems (ISS), Karlsruhe, Germany, 19–20 September 2017; pp. 1–18. [Google Scholar]
- Cai, T.; Xu, Q.; Gao, S.; Zhou, D. A Short-baseline dual-antenna BDS/MIMU integrated navigation system. E3S Web Conf. 2019, 95, 03007. [Google Scholar] [CrossRef]
- Cai, T.; Xu, Q.; Zhou, D.; Gao, S.; Liu, Y.; Huang, J.; Emelyantsev, G.I.; Stepanov, A.P. Multimode GNSS/MIMU integrated orientation and navigation system. In Proceedings of the 26th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), Saint Petersburg, Russia, 27–29 May 2019; p. 212. [Google Scholar]
- Chen, W.; Qin, H.; Zhang, Y.; Jin, T. Accuracy assessment of single and double difference models for the single epoch GPS compass. Adv. Space Res. 2012, 49, 725–738. [Google Scholar] [CrossRef]
- Emel’yantsev, G.I.; Stepanov, A.P.; Blazhnov, B.A.; Radchenko, D.A.; Vinokurov, I.Y.; Petrov, P.Y. Using Satellite Receivers with a Common Clock in a Small-Sized GNSS Compass. In Proceedings of the IEEE 24th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), Saint Petersburg, Russia, 29–31 May 2017; pp. 1–2. [Google Scholar]
- Available online: https://www.fizoptika.ru/catalog/gruppa-vg-910 (accessed on 11 August 2020).
- Available online: https://www.furuno.com/files/Brochure/484/upload/SCX2021_EN_200120_U.pdf (accessed on 10 October 2020).
- Available online: https://www.hemispheregnss.com/wp-content/uploads/2019/09/hemispheregnss_v500_datasheet_web.pdf (accessed on 10 October 2020).
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering: With MATLAB Exercises, 4th ed.; John Wiley: Hoboken, NJ, USA, 2012; ISBN 978-0-470-60969-9. [Google Scholar]
- Stepanov, O.A. Optimal and suboptimal filtering in integrated navigation systems. In Aerospace Navigation Systems; Nebylov, A.V., Watson, J., Eds.; John Wiley & Sons, Ltd.: Chichester, UK, 2016; pp. 244–298. ISBN 978-1-119-16306-0. [Google Scholar]
- Lefèvre, H.C. The fiber-optic gyroscope. In The Artech House Applied Photonics Series, 2nd ed.; Artech House: Boston, MA, USA, 2014; ISBN 978-1-60807-695-6. [Google Scholar]
- Antonovich, K.M. Ispol’zovanie Sputnikovykh Radionavigatsionnykh Sistem v Geodezii: V Dvukh Tomakh; Kartgeotsentr: Moskva, Russia, 2005; ISBN 978-5-86066-071-7. [Google Scholar]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Emel’yantsev, G.; Stepanov, O.; Stepanov, A.; Blazhnov, B.; Dranitsyna, E.; Evstifeev, M.; Eliseev, D.; Volynskiy, D. Integrated GNSS/IMU-Gyrocompass with Rotating IMU. Development and Test Results. Remote Sens. 2020, 12, 3736. https://doi.org/10.3390/rs12223736
Emel’yantsev G, Stepanov O, Stepanov A, Blazhnov B, Dranitsyna E, Evstifeev M, Eliseev D, Volynskiy D. Integrated GNSS/IMU-Gyrocompass with Rotating IMU. Development and Test Results. Remote Sensing. 2020; 12(22):3736. https://doi.org/10.3390/rs12223736
Chicago/Turabian StyleEmel’yantsev, Gennadiy, Oleg Stepanov, Aleksey Stepanov, Boris Blazhnov, Elena Dranitsyna, Mikhail Evstifeev, Daniil Eliseev, and Denis Volynskiy. 2020. "Integrated GNSS/IMU-Gyrocompass with Rotating IMU. Development and Test Results" Remote Sensing 12, no. 22: 3736. https://doi.org/10.3390/rs12223736
APA StyleEmel’yantsev, G., Stepanov, O., Stepanov, A., Blazhnov, B., Dranitsyna, E., Evstifeev, M., Eliseev, D., & Volynskiy, D. (2020). Integrated GNSS/IMU-Gyrocompass with Rotating IMU. Development and Test Results. Remote Sensing, 12(22), 3736. https://doi.org/10.3390/rs12223736