Application of the DIC Technique to Remote Control of the Hydraulic Load System



Abstract
1. Introduction
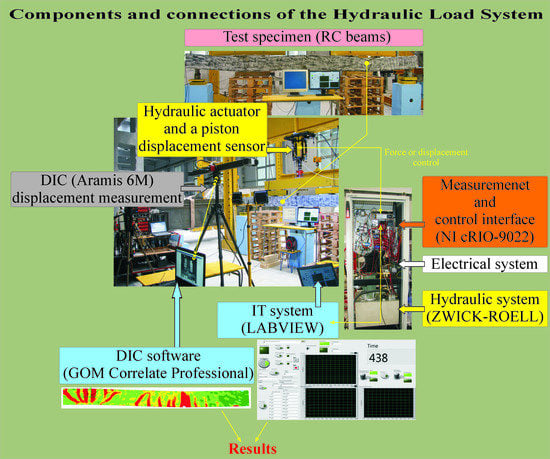
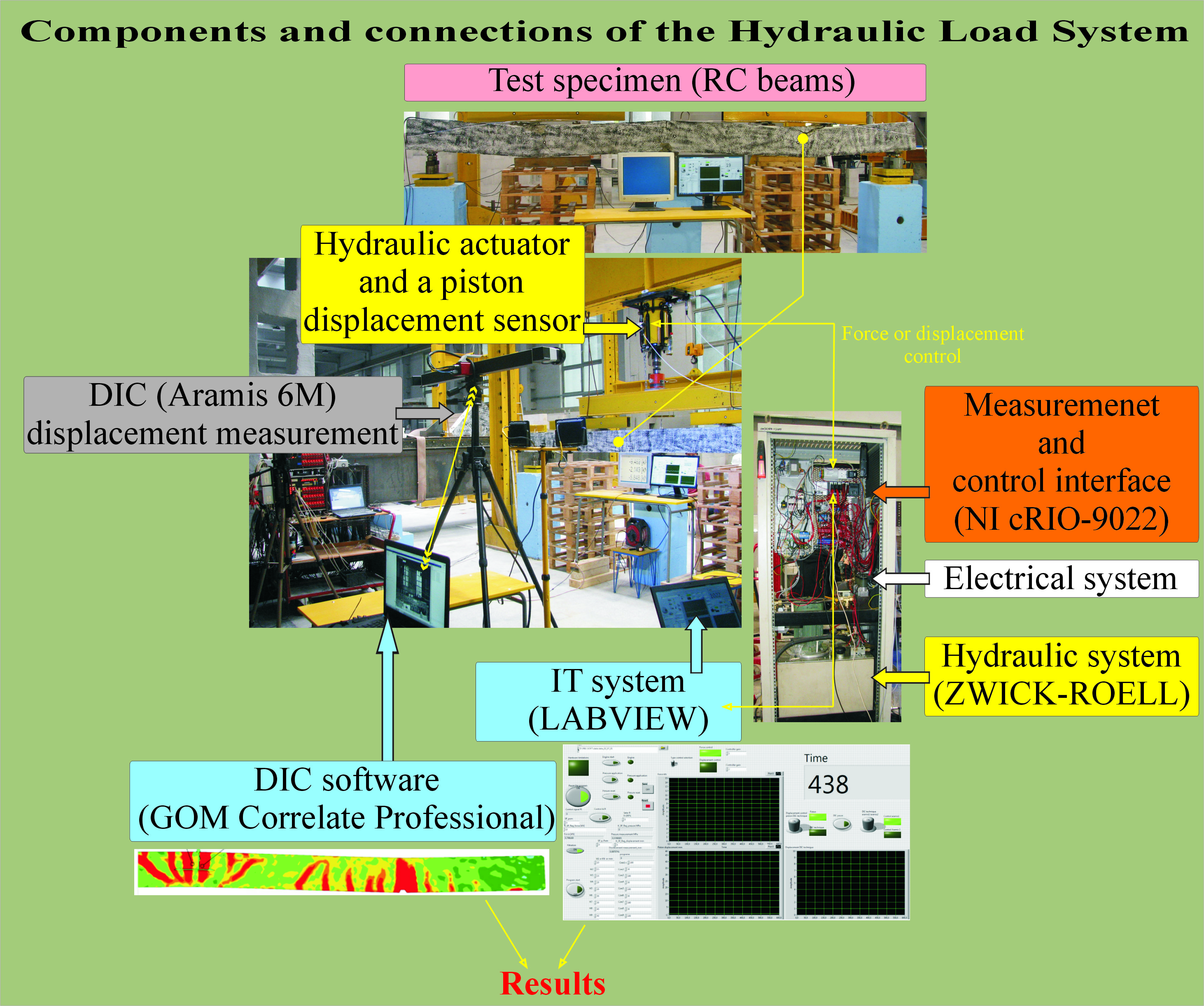
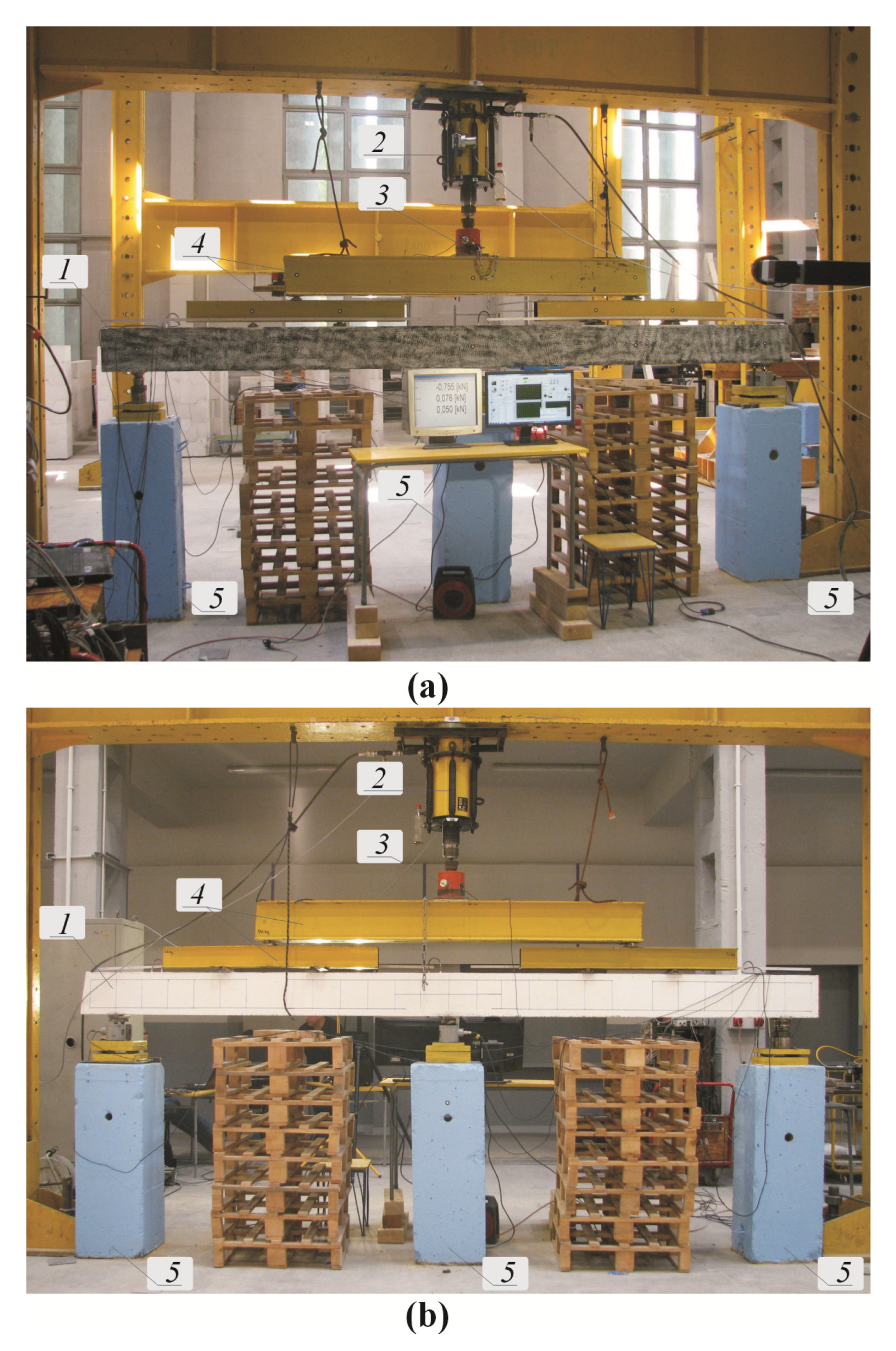
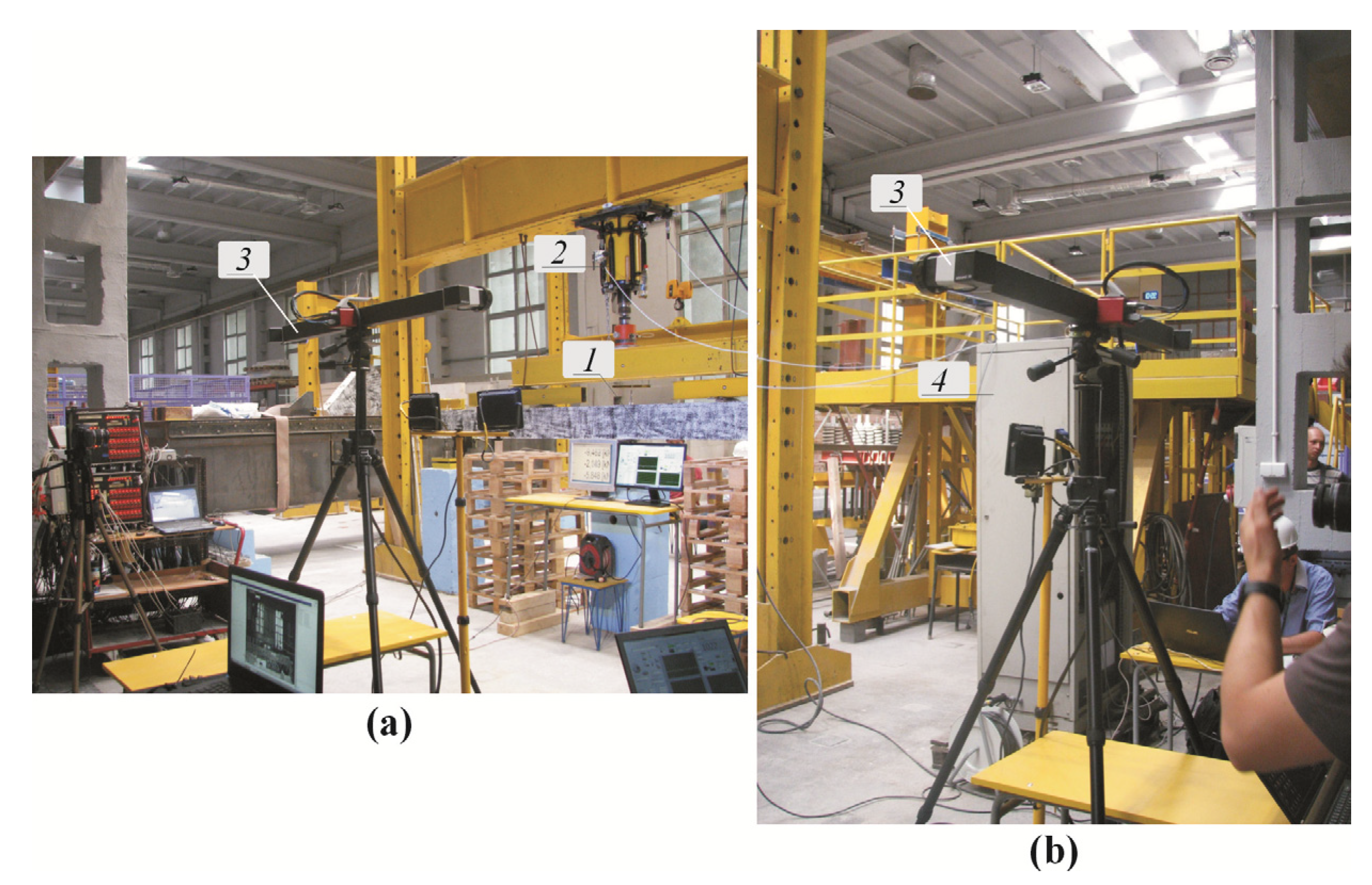
2. Development of the Test Stand
- digital image correlation equipment—ARAMIS 6M,
- hydraulic system,
- electrical system,
- measurement and control interface,
- IT system.
- Components of each subsystem, their mutual connections and ways of their operating are described further in the paper.
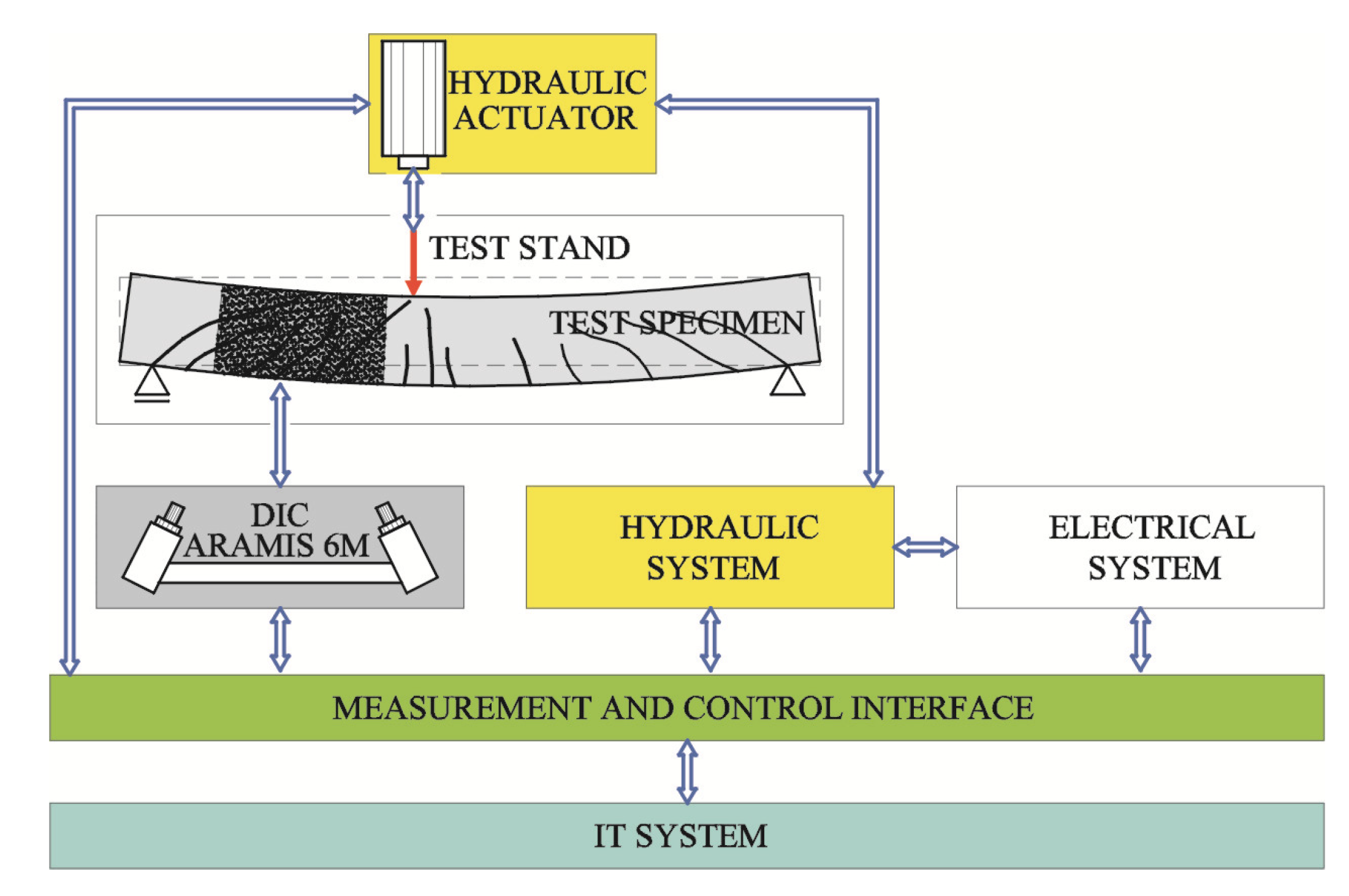
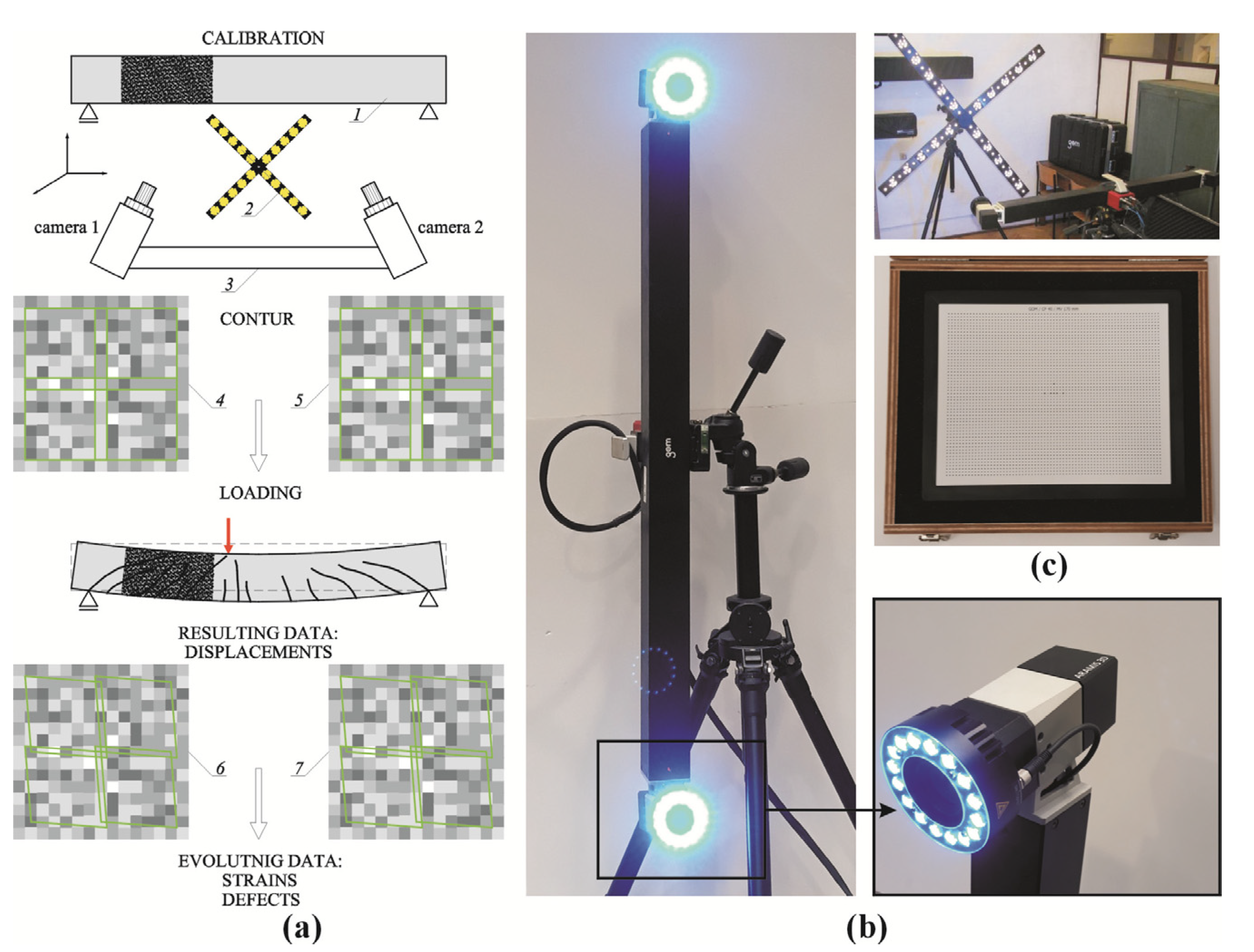
2.1. Digital Image Correlation Equipment– ARAMIS 6M
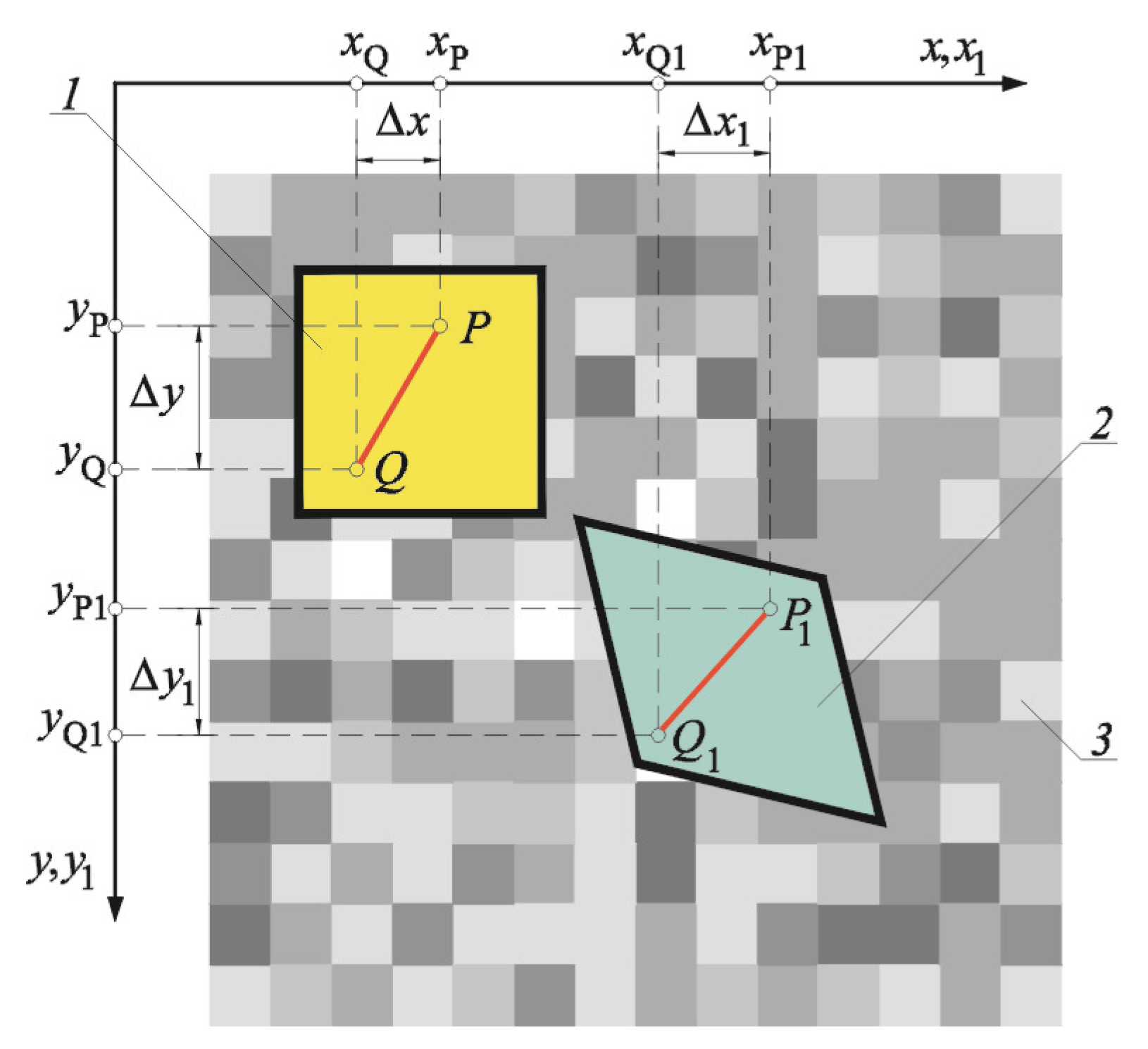
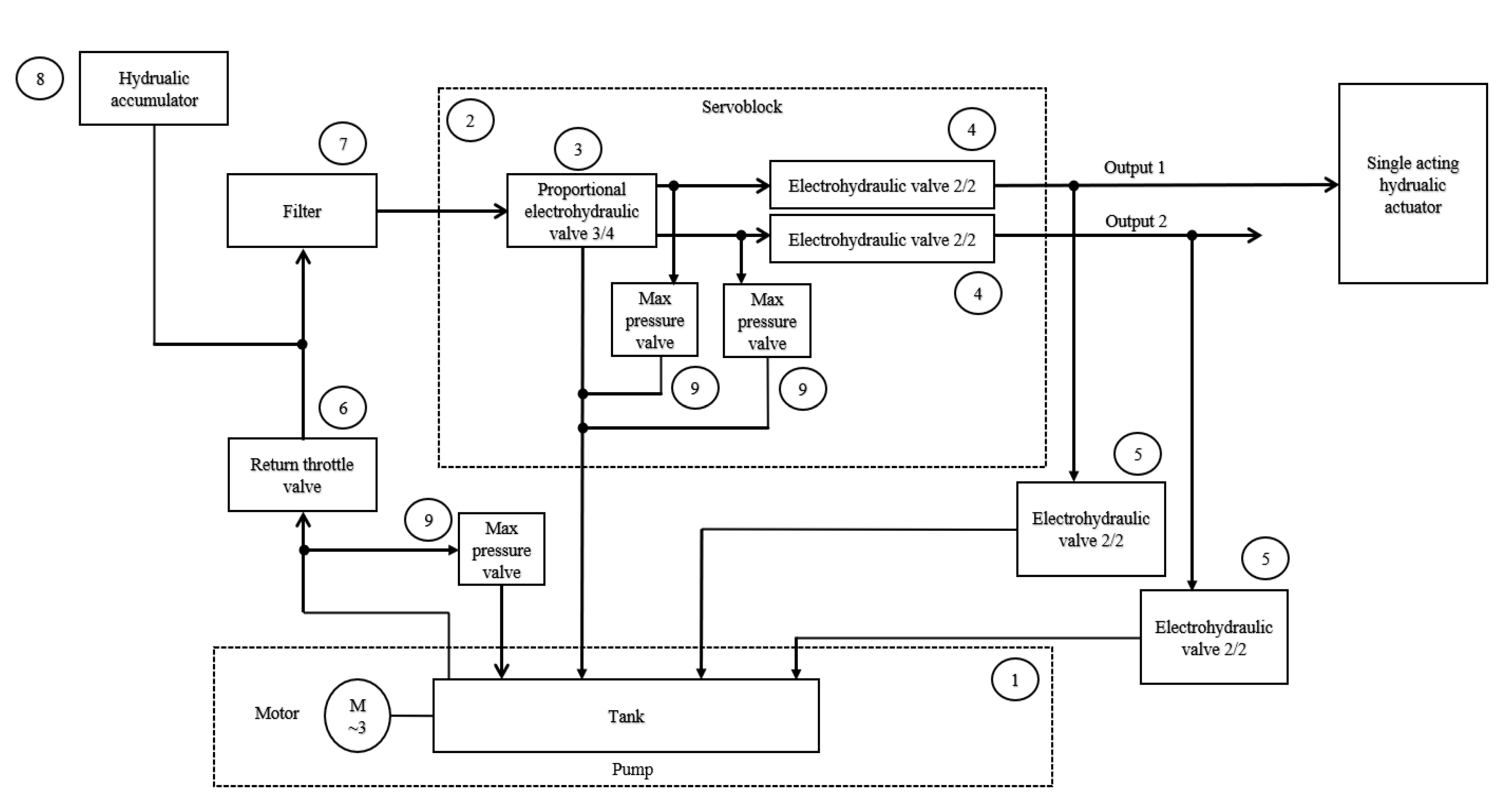
2.2. Hydraulic System
- A proportional electrohydraulic valve (No. 3) to control flow in a hydraulic circuit. The modified control and the measurement system were used to control the flow of working medium in the hydraulic system by adjusting the proportional electrohydraulic valve with PWM signal. The system was controlled with CompactRio controller by National Instruments company. That solution ensured the indirect steady control of pressure at outputs supplying driver elements.
- Two bistable two-way electrohydraulic valves with a return spring (No. 4). Both elements were operating in either open or close position. Working medium in the open position was delivered to the output (supplied the driver element) in contrast to the close position, in which the medium was not delivered to the output. These valves were controlled with 0–24V digital signal.
- Another two bistable two-way hydraulic valves (No. 5) were between the hydraulic servoblock and the driver element (hydraulic actuator). They were used as drain (check) valves for hydraulic working medium delivered from the supply system of driver elements. The valve switching between two positions (open and close) was analogous to the above described process (with digital signal).
- A manually controlled return throttle valve (No. 6) used as pressure regulator at the pump output and protecting the system against a change in flow direction of working medium.
- A filter (No. 7) used as the cleaning system for various types of contamination.
- The system of two hydraulic accumulators (No. 8) was the additional source of energy for the hydraulic system at an increased demand on energy, and also eliminated pressure pulsation of working medium.
- Three hydraulic safety valves (No. 9) to provide protection against too high pressure in the hydraulic system.
- The block diagram of the hydraulic system is illustrated in Figure 4.
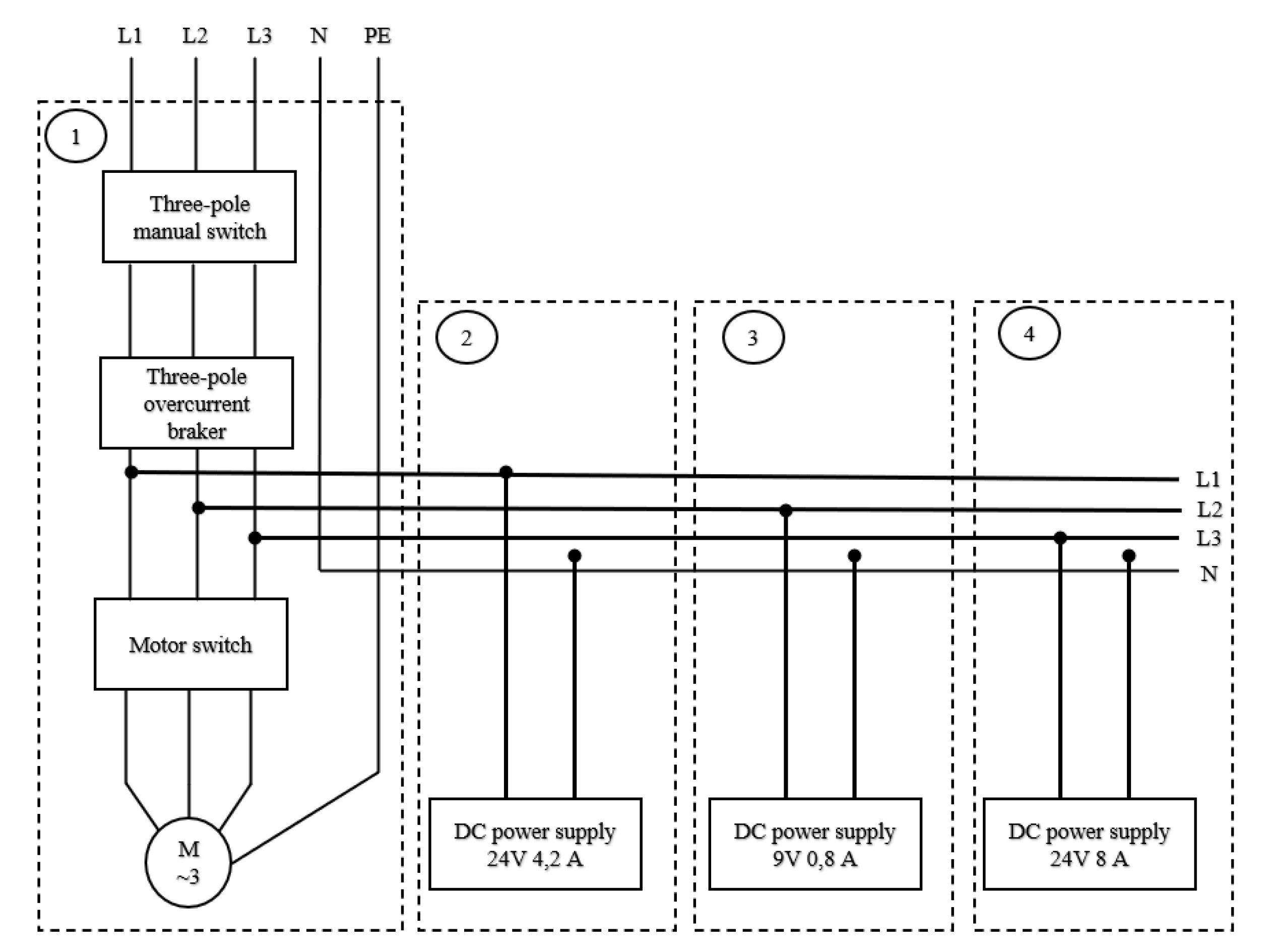
2.3. Electrical System
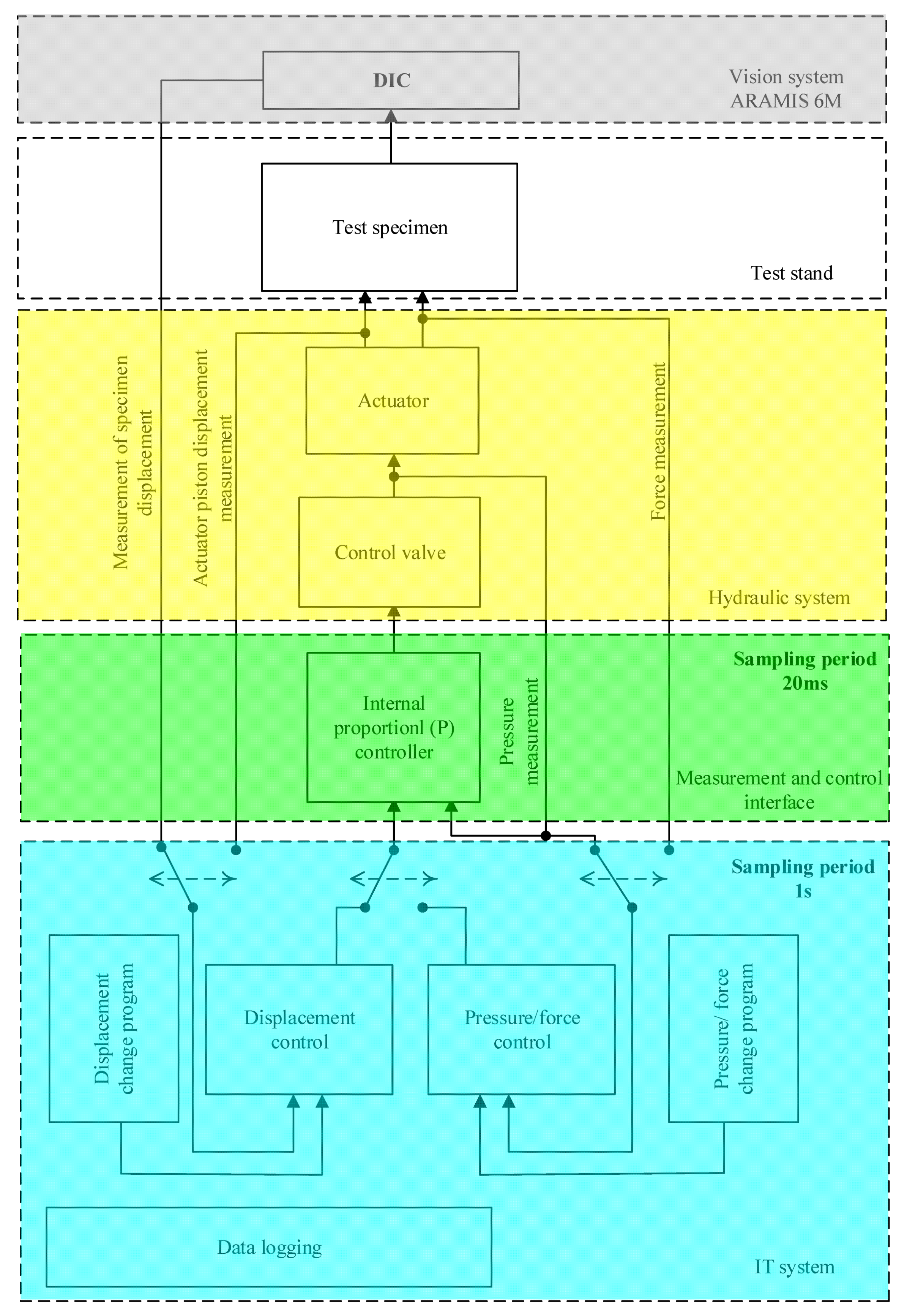
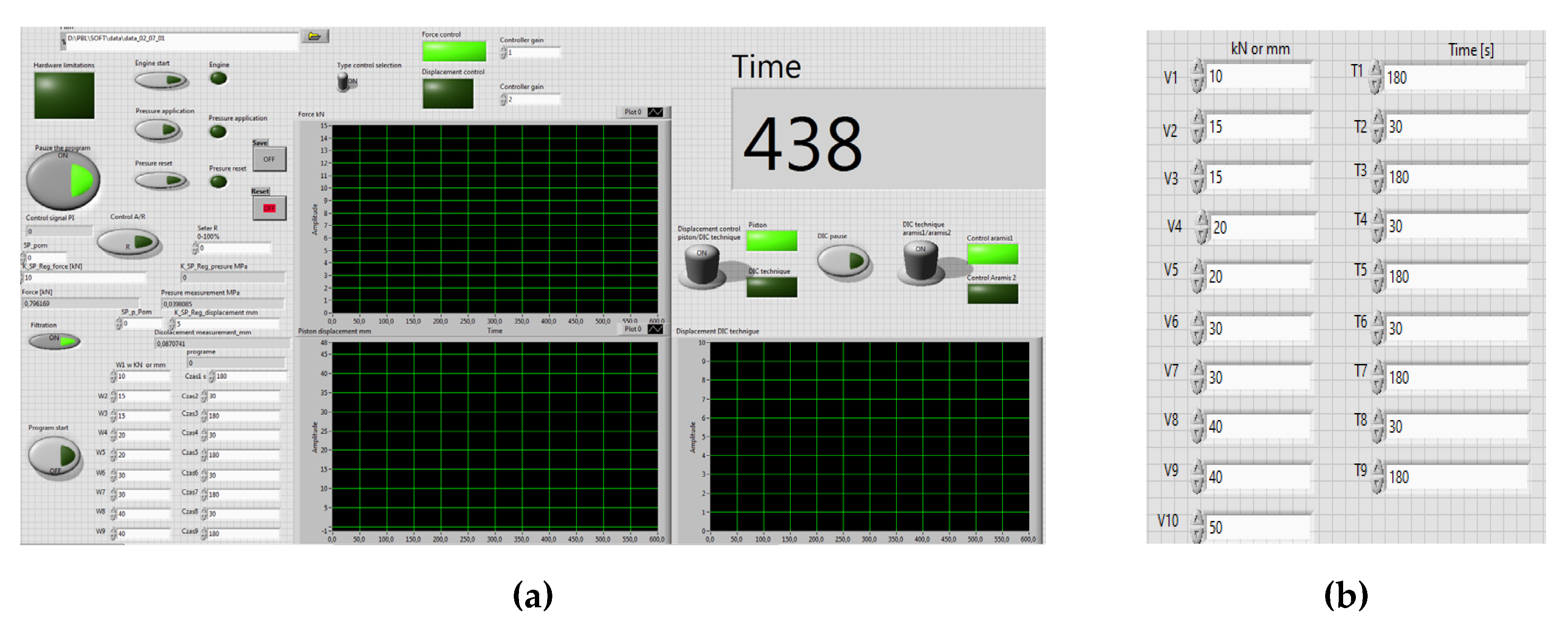
2.4. IT System and Measurement and Control Interface
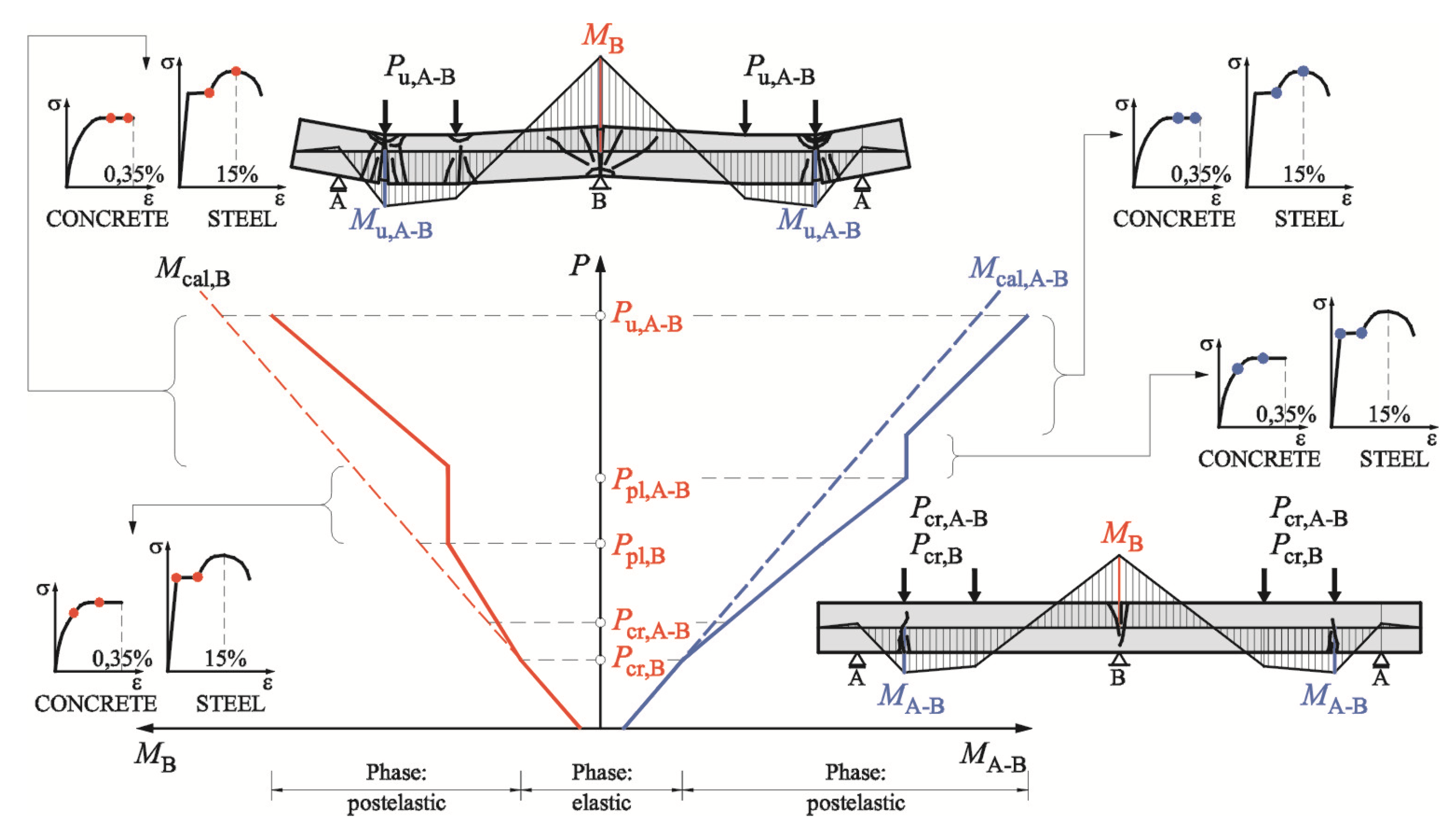
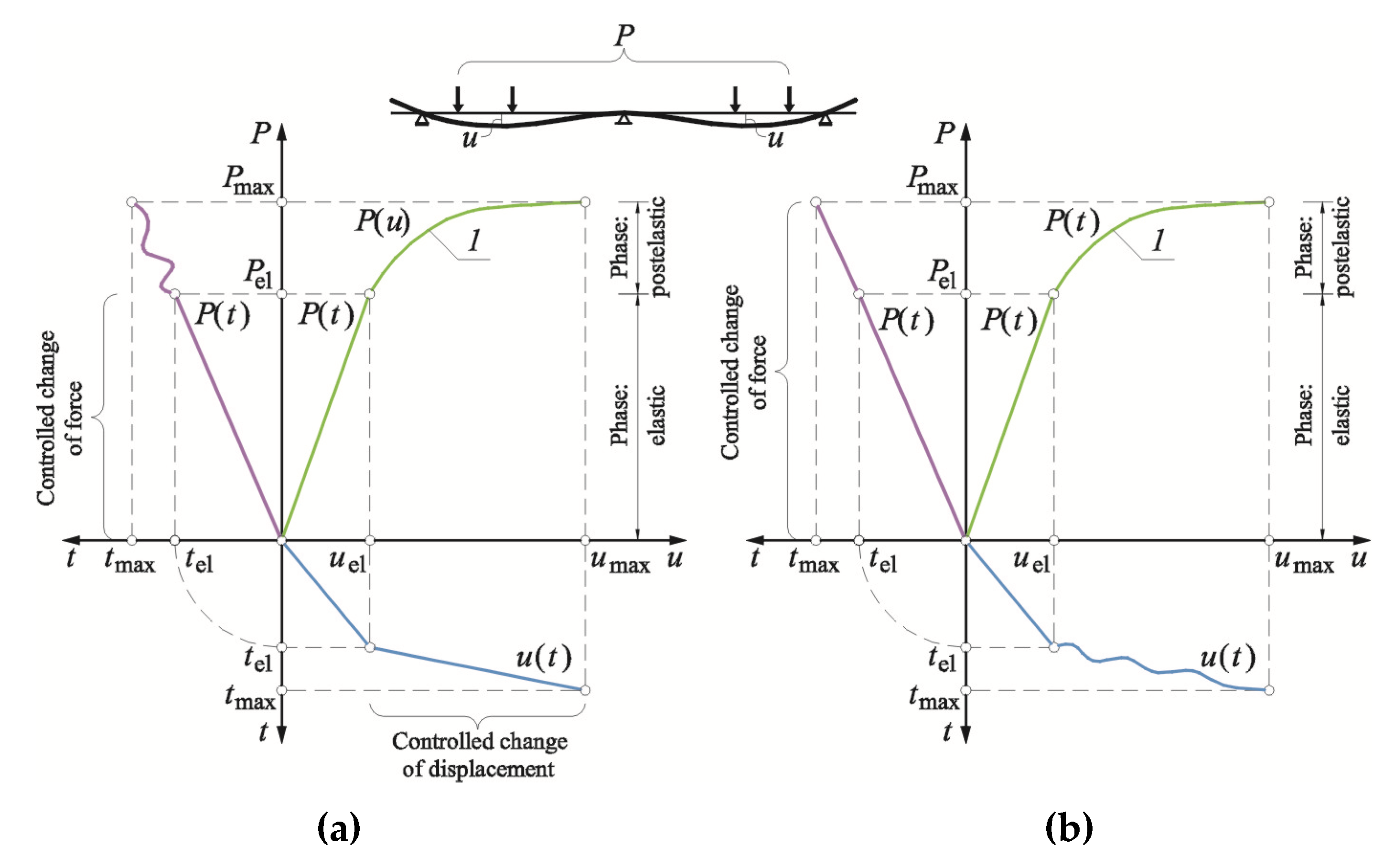
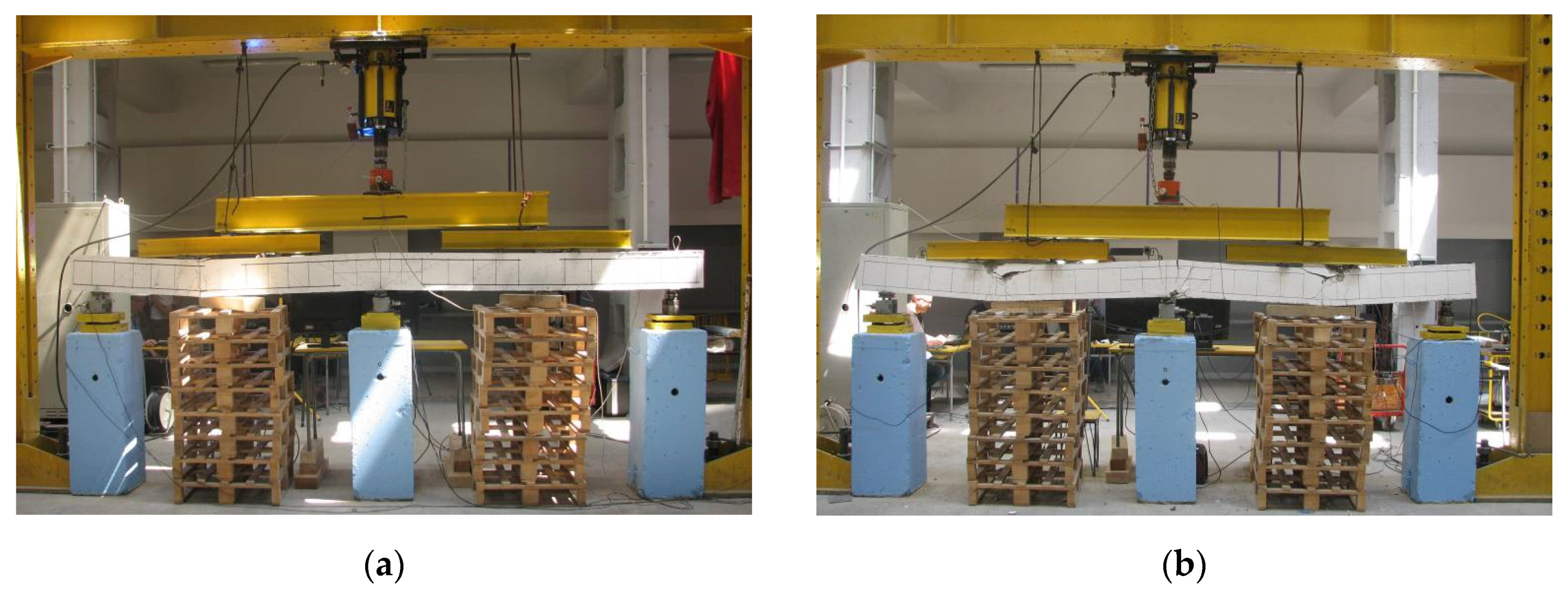
3. Test Stand Validation
3.1. Test Models
3.2. Software Settings
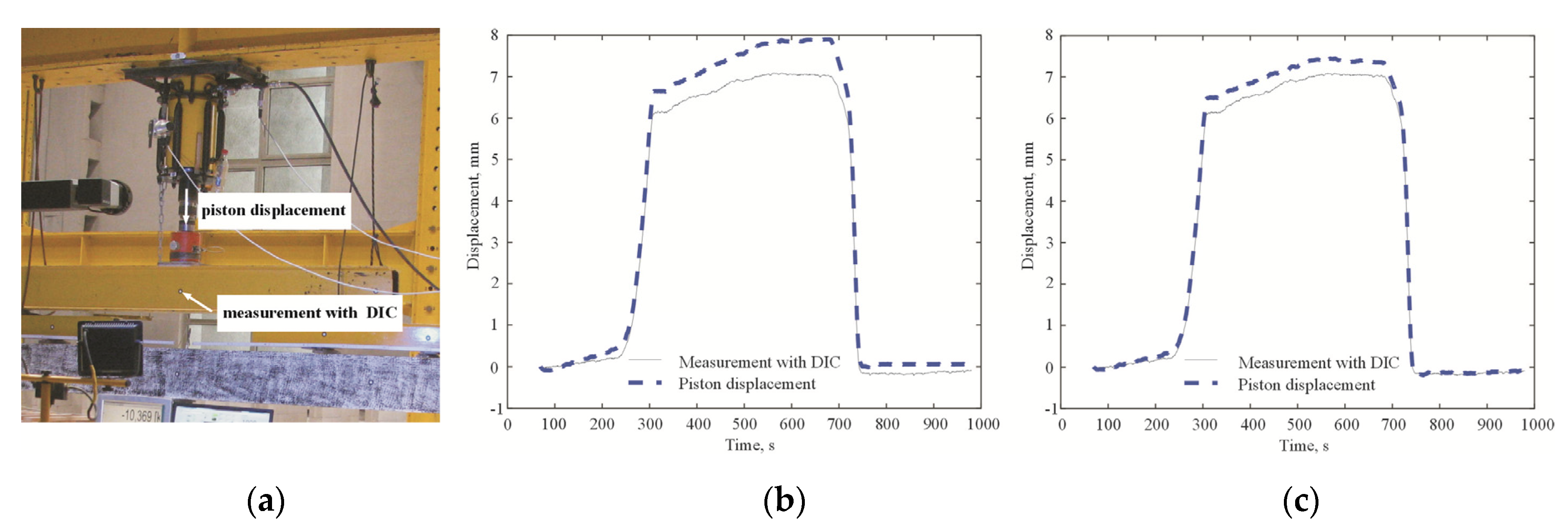
3.3. Identifying Measurement Errors and Determining Values of Correction Factor
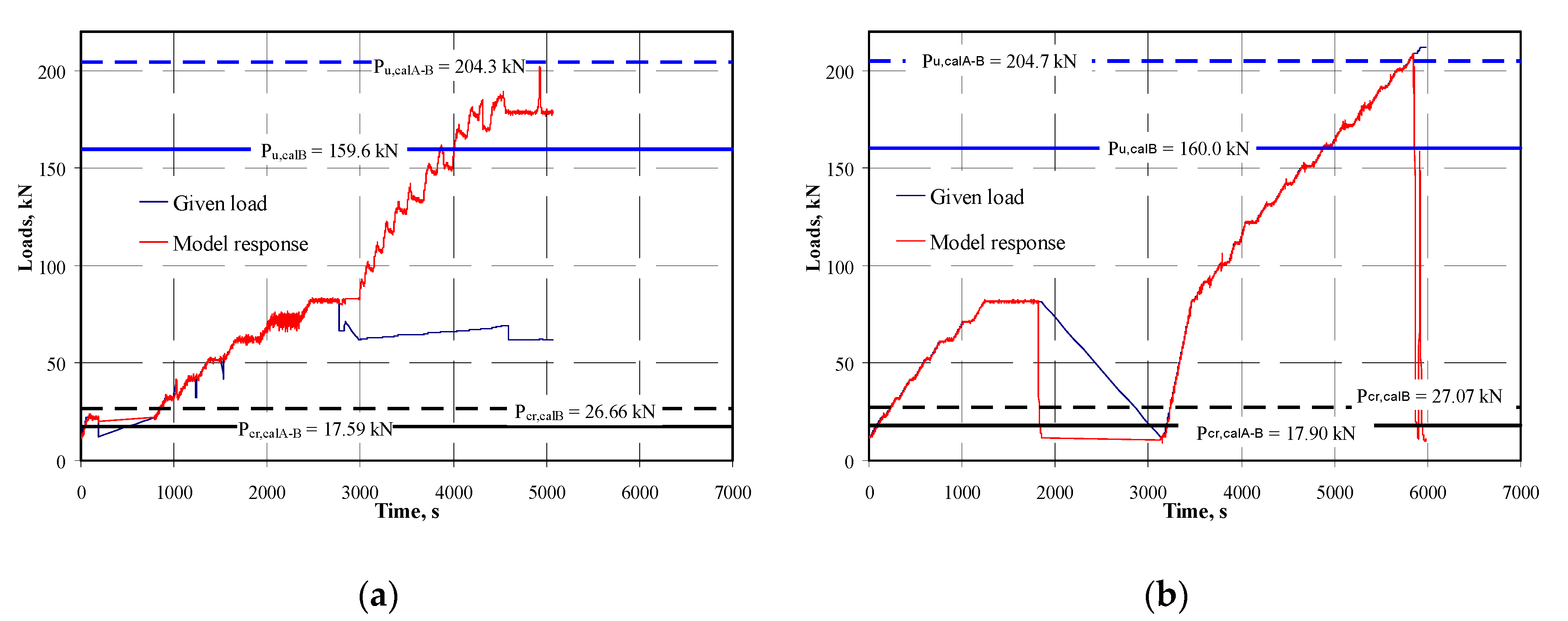
4. Test Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hernandez, B.A.; Gill, H.S.; Gheduzzi, S. A Novel Modelling Methodology Which Predicts the Structural Behaviour of Vertebral Bodies under Arial Impact Loading: A Finite Element and DIC Study. Materials 2020, 13, 4262. [Google Scholar] [CrossRef] [PubMed]
- Carvalho, L.; Roriz, P.; Simões, J.; Frazão, O. New Trends in Dental Biomechanics with Photonics Technologies. Appl. Sci. 2015, 5, 1350–1378. [Google Scholar] [CrossRef]
- Gamboa, C.B.; Martín-Béjar, S.; Trujillo Vilches, F.J.; Castillo López, G.; Sevilla Hurtado, L. 2D–3D Digital Image Correlation Comparative Analysis for Indentation Process. Materiale 2019, 12, 4156. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.H.; Liu, L.; Sham, F.C.; Chan, Y.S.; Ng, S.P. Optical strain gauge vs. traditional strain gauges for concrete elasticity modulus determination. Opt. Int. J. Light Electron Opt. 2010, 18, 1635–1641. [Google Scholar] [CrossRef]
- Romeo, E. Two-dimensional digital image correlation for asphalt mixture characterization: Interest and limitations. Road Mater. Pavement Des. 2013, 14, 747–763. [Google Scholar] [CrossRef]
- Blenkinsopp, R.; Roberts, J.; Parland, A.; Sherratt, P.; Smith, P.; Lucas, T. A Method for Calibrating a Digital Image Correlation System for Full-Field Strain Measurements during Large Deformations. Appl. Sci. 2019, 9, 2828. [Google Scholar] [CrossRef]
- Zhao, Y.; Taheri, A.; Soltani, A.; Karakus, M.; Deng, A. Strength Development and Strain Localization Behavior of Cemented Paste Backfills Rusing Portland Cement and Fly Ash. Materials 2019, 12, 3282. [Google Scholar] [CrossRef]
- Pan, K.; Yu, R.C.; Hang, X.; Ruiz, G.; Wu, Z. Propagation Speed of Dynamic Mode-I Cracks in Self-Compacting Steel Fiber-Reinforced Concrete. Materials 2020, 13, 4053. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Yan, G.; Yang, Q.; Gao, J.; Li, Y. Strain Field Evolution Characteristics of Free Surface during Crater Blasting in Sandstone under High Stress. Appl. Sci. 2020, 10, 6285. [Google Scholar] [CrossRef]
- Linke, M.; Flügge, F.; Olivares-Ferrer, A.J. Design and Validation of a Modified Compression-After-Impact Testing Device for Thin-Walled Composite Plater. J. Compos. Sci. 2020, 4, 126. [Google Scholar] [CrossRef]
- Kötter, B.; Karoten, J.; Körbelin, J.; Fiedler, B. CFRP Thin-Ply Fibre Metal Laminates: Influences of Ply Thickness and Metal Layers on Open Hole Tension and Compression Properties. Materials 2020, 13, 910. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Hu, D.; Hang, M.; Dai, W.; Hang, W. In Situ Measurements for Plastic Zone Ahead of Crack Tip and Continuous Strain Variation under Cyclic Loading Using Digital Image Correlation Method. Metals 2020, 10, 273. [Google Scholar] [CrossRef]
- Zhan, N.; Hu, Z.; Hang, X. Experimental Investigation of Fatigue Crack Growth Behavior in Banded Structure of Pipeline Steel. Metals 2020, 10, 1193. [Google Scholar] [CrossRef]
- Carroll, J.D.; Abuzaid, W.; Lambros, J.; Sehitoglu, H. High resolution digital image correlation measurements of strain accumulation in fatigue crack growth. Int. J. Fatigue 2013, 57, 140–150. [Google Scholar] [CrossRef]
- Travelletti, J.; Delacourt, C.; Allemand, P.; Malet, J.P.; Schmittbhul, J.; Toussaint, R.; Bastard, M. Correlation of multi-temporal ground-based optical images for landslide monitoring: Application, potential and limitations. ISPRS J. Photogramm. Remote Sens. 2012, 70, 39–55. [Google Scholar] [CrossRef]
- Mazzanti, P.; Caporossi, P.; Muzi, R. Sliding Time Master Digital Image Correlation Analyses of CubeSat Images for landslide Monitoring: The Rattlesnake Hills Landslide (USA). Remote Sens. 2020, 12, 592. [Google Scholar] [CrossRef]
- Bozzano, F.; Mazzanti, P.; Perissin, D.; Rocca, A.; De Pari, P.; Discenza, M.E. Basin Scale Assessment of Landslides Geomorphological Setting by Advanced InSAR Analysis. Remote Sens. 2017, 9, 267. [Google Scholar] [CrossRef]
- Yoshida, S.; Sasaki, T. Deformation Wave Theory and Application to Optical Interferometry. Materials 2020, 13, 1363. [Google Scholar] [CrossRef]
- Drobiec, Ł.; Jasiński, R.; Mazur, W.; Rybarczyk, T. Numerical Verification of Interaction between Masonry with Precast Reinforced Lintel Made of AAC and Reinforced Concrete Confining Elements. Appl. Sci. 2020, 10, 5446. [Google Scholar] [CrossRef]
- Phelan, R.M. Hydraulic press. Access Sci. 2020. [Google Scholar] [CrossRef]
- Hinton, C.E. Adaptive PID Control of Dynamic Maaterials-Testing Machines Using Remembered Stiffness, Application of Automation Technology to Fatigue and Fracture Testing and Analysis: Third Volume, ASTM STP International 1303; Braun, A.A., Gilbert-Son, L.N., Eds.; American Society for Testing and Materials: West Conshohocken, PA, USA, 1997; pp. 111–119. [Google Scholar] [CrossRef]
- Bolton, W. Mechatronics Electronic Control Systems in Mechanical and Electrical Engineering; Prentice Hall: London, UK, 2009; ISBN 978-0-13-240763-2. [Google Scholar]
- Rohner, P. Industrial Hydrualic Control; Willey: Hoboken, NJ, USA, 1995; ISBN 958149313. [Google Scholar]
- Bolton, W. Pneumatic and Hydraulic Systems; Butterworth-Heinemann Ltd.: Oxford, UK, 1997; ISBN 750638362. [Google Scholar]
- Aciatore, D.G.; Histand, M.B. Introduction to Mechatronics and Measurement Systems; McGraw-Hill Companies: New York, NY, USA, 2012; ISBN 978-0072402414. [Google Scholar]
- Scholz, H. Deflection and ductility of continuous RC beams. Mag. Concr. Res. 1993, 45, 197–202. [Google Scholar] [CrossRef]
- Silva, P.F.; Ibell, T.J. Evaluation of Moment Distribution in Continuous Fiber-Reinforced Polymer-Strengthened Concrete Beams. Aci. Struct. J. 2008, 105, 729–739. [Google Scholar]
- Sveinson, T.; Dilger, W.H. Moment Redistribution in Reinforced Concrete Structures. In Progress in Structural Engineering; Grierson, D.E., Franchi, A., Riva, P., Eds.; Springer: Dordrecht, The Netherlands, 1991. [Google Scholar] [CrossRef]
- Oehlers, D.J.; Haskett, M.; Mohamed Ali, M.S.; Griffith, M.C. Moment redistribution in reinforced concrete beams. Proc. Inst. Civ. Eng. Struct. Build. 2010, 163, 165–176. [Google Scholar] [CrossRef]
- do Carmo, R.N.F.; Sérgio Lopes, S.M.R. Ductility and linear analysis with moment redistribution in reinforced high-strength concrete beams. Can. J. Civ. Eng. 2005, 32, 194–203. [Google Scholar] [CrossRef]
- Oehlers, D.J.; Ju, G.; Li, I.S.T.; Seracino, R. Moment redistribution in continuous plated RC flexural members. Part 1: Neutral axis depth approach and tests. Eng. Struct. 2004, 26, 2197–2207. [Google Scholar] [CrossRef]
- Oehlers, D.J.; Ju, G.; Li, I.S.T.; Seracino, R. Moment redistribution in continuous plated RC flexural members. Part 2: Flexural rigidity approach. Eng. Struct. 2004, 26, 2209–2218. [Google Scholar] [CrossRef]
- Aiello, M.A.; Valente, L.; Rizzo, A. Moment redistribution in continuous reinforced concrete beams strengthened with carbon-fiber-reinforced polymer laminates. Mech. Compos. Mater. 2007, 43, 453–466. [Google Scholar] [CrossRef]
- do Carmo, R.N.F.; Sérgio Lopes, S.M.R. Available plastic rotation in continuous high-strength concrete beams. Can. J. Civ. Eng. 2008, 35, 1152–1162. [Google Scholar] [CrossRef]
- do Carmo, R.N.F.; Sérgio Lopes, S.M.R. Required plastic rotation of RC beams. Proc. Inst. Civ. Eng. Struct. Build 2006, 159, 77–86. [Google Scholar] [CrossRef]
- Fung, Y.C. Foundations of Solid Mechanics; Prentice Hall Inc.: Englewood Cliffs, NJ, USA, 1965. [Google Scholar]
- Chu, T.C.; Ranson, W.F.; Sutton, M.A.; Peters, W.H. Application of digital-image-correlation techniques to experimental mechanics. Exp. Mech. 1985, 25, 232–244. [Google Scholar] [CrossRef]
- Jin, G.-C.; Bao, N.-K.; Chung, P.S. An advanced digital speckle correlation method for strain measurement and nondestructive testing. In International Conference on Experimental Mechanics: Advances and Applications; International Society for Optics and Photonics: Singapore, 1997; Volume 2921, pp. 572–577. [Google Scholar] [CrossRef]
- Ma, S.-P.; Jin, G.-C. New correlation coefficients designed for digital speckle correlation method (DSCM). Proc. Spie 2003, 5058, 25–33. [Google Scholar] [CrossRef]
- Lewis, J.P. Fast Template Matching, Vision Interface 95; Canadian Image Processing and Pattern Recognition Society: Quebec City, QC, Canada, 15–19 May 1995; pp. 120–123. [Google Scholar]
- Tan, Y.; Zhang, L.; Guo, M.; Shan, L. Investigation of the deformation properties of asphalt mixtures with DIC technique. Constr. Build. Mater. 2012, 7, 581–590. [Google Scholar] [CrossRef]
- Nocoń, W.; Polaków, G. LabVIEW Based Cooperative Design for Control System Implementation; Luo, Y., Ed.; CDVE 2011, LNCS 6874; Springer: Berlin/Heidelberg, Germany, 2011; pp. 137–140. [Google Scholar]
- Nocoń, W. On the possibility of suspended solid quantity estimation based on fractional density changes in a batch settler. Powder Technol. 2013, 235, 931–939. [Google Scholar] [CrossRef]
- Taylor, J.R. An Introduction to Error Analysis: The Study of Uncertainties in Physical Measurements; University Science Books: Sausalito, CA, USA, 1982; pp. 128–129. ISBN 0-935702-75-X. [Google Scholar]
- Harlow, R.; Dotson, C.; Thompson, R.L. Fundamentals of Dimensional Metrology, 4th ed.; Delmar Publishers: Albany, NY, USA, 2002. [Google Scholar]
- Seber, G.A.F.; Lee, A.J. Linear Regression Analysis; John Wiley & Sons Publications: Hoboken, NJ, USA, 2003. [Google Scholar] [CrossRef]
- Hryniuk, D.; Suhorukova, I.; Oliferovich, N. Adaptive smoothing and filtering in transducers. In Proceedings of the 2016 Open Conference of Electrical, Electronic and Information Sciences, (eStream 2016), Vilnius, Lithuania, 13–15 October 2016; pp. 1–4. [Google Scholar]
- Hvozdzeu, M.; Karpovich, M. Dynamic signals filtration in high level noise condition. In Mokslas—Lietuvos ateitis/Science—Future of Lithuania; Published by VGTU Press: Vilnius, Lithuania, 2020; Volume 12, pp. 1–3. ISSN 2029-2341/eISSN 2029–2252. [Google Scholar] [CrossRef]
- Morari, M.; Zafiriou, E. Robust Process Control; Prentice-Hall Inc.: Upper Saddle River, NJ, USA, 1989; ISBN1 0137821530. ISBN2 9780137821532. [Google Scholar]
- Seborg, D.E.; Edgar, T.F.; Mellichamp, D.A. Process Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 1989. [Google Scholar]
- Franks, R.G.; Worley, C.W. Quantitive Analysis of Cascade Control. Ind. Eng. Chem. 1956, 48, 1074–1079. [Google Scholar] [CrossRef]
- Kaya, I.; Tan, N.; Atherton, D.P. Improved Cascade Control Structure and Controller Design. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference 2005, Seville, Spain, 12–15 December 2005. [Google Scholar]
- Raja, G.L.; Ali, A. Improved tuning of cascade controllers for stable and integrating processes with time Delay. In Proceedings of the Michael Faraday IET International Summit 2015, Kolkata, India, 12–13 September 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Lloyds Raja, G.; Ali, A. Design of Cascade Control Structure for Stable Processes using Method of Moments. In Proceedings of the 2nd International Conference on Power and Embedded Drive Control (ICPEDC), Chennai, Tamilnadu, India, 21–23 August 2019. [Google Scholar] [CrossRef]
- Klopot, T.; Skupin, P.; Grelewicz, P.; Czeczot, J. Practical PLC-based Implementation of Adaptive Dynamic Matrix Controller for Energy-Efficient Control of Heat Sources. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Nowak, P.; Stebel, K.; Klopot, J.; Czeczot, T.; Fratczak, M.; Laszczyk, P. Flexible function block for industrial applications of active disturbance rejection controller. Arch. Control Sci. 2018, 28, 379–400. [Google Scholar] [CrossRef]
- CEN. EN 1992-1-1:2010 Eurocode 2: Design of Concrete Structures—Part 1-1: General Rules and Rules for Buildings; CEN: Brussels, Belgium, 2010. [Google Scholar]
- Polish Patent Office. The Testing Machine for Testing the Elements and Structures. Niepodległości 188/192, 00-950, No. P. 432225, 16 December 2019. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beam | Beam Self-Weight | Weight of Steel Equipment, kN | Total Load, kN | Total Bending Moment with Self-weight and Equipment Weight, kNm | ||||
|---|---|---|---|---|---|---|---|---|
| Pcr,B | Pcr,A-B | Pu,A-B | |Mcr,B| | Mcr,A-B | Mu,A-B | |||
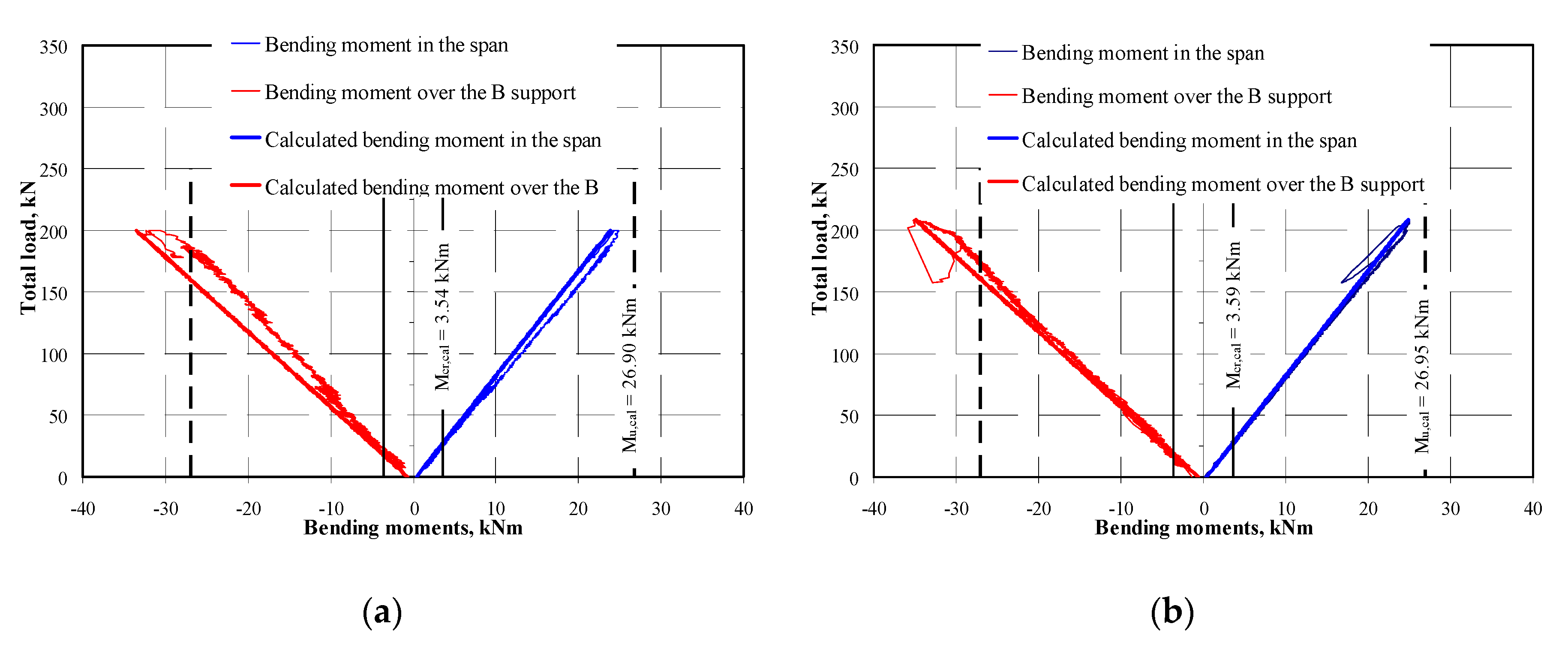
| 1 | 3.08 | 1.96 | 20.2 | 30.0 | 199.9 | 3.44 | 4.12 | 24.7 |
| 2 | 3.03 | 16.1 | 30.1 | 208.4 | 3.135 | 4.06 | 24.9 | |
| Beam | Test Results Total Load, kN | Calculated Results Total Load, kN | Comparison | ||||||
|---|---|---|---|---|---|---|---|---|---|
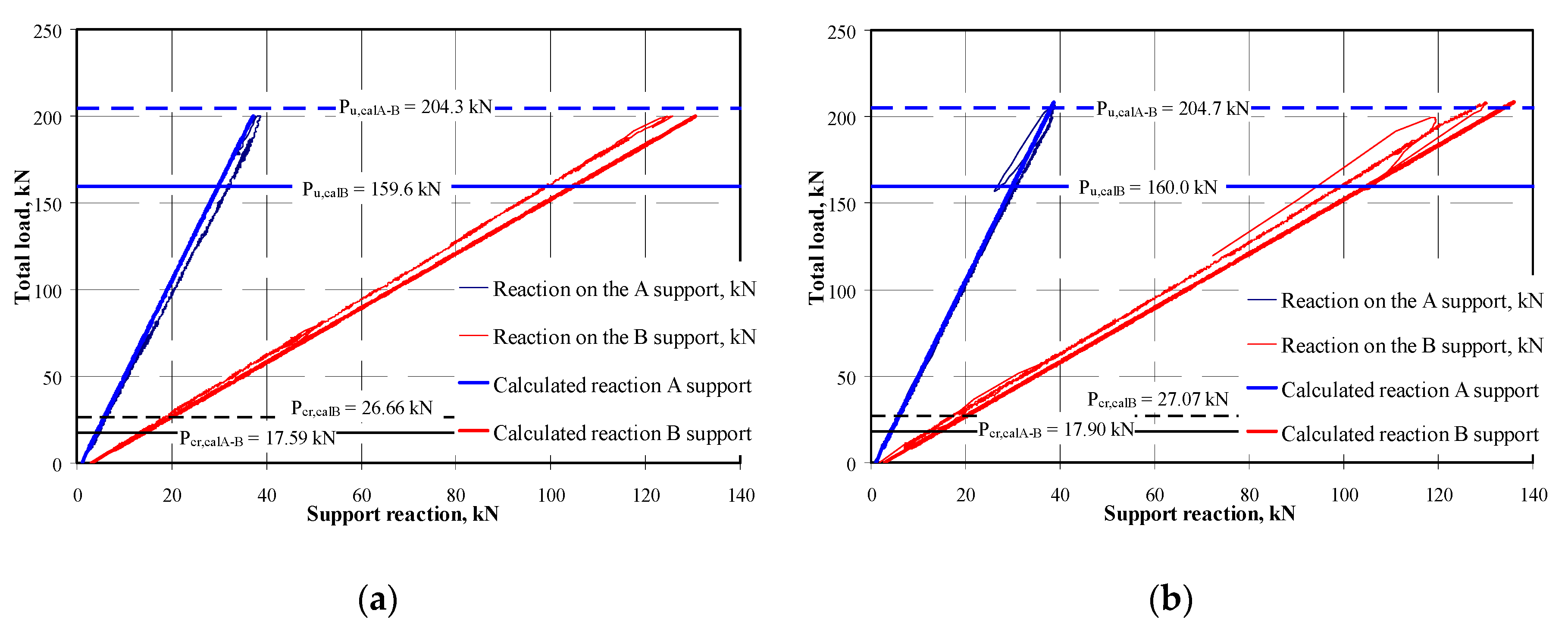
| Pcr,B | Pcr,A-B | Pu,A-B | Pcr,calB | Pcr,calA-B | Pu,calA-B | ||||
| 1 | 20.2 | 30.0 | 199.9 | 17.59 | 26.66 | 204.3 | 1.15 | 1.13 | 0.98 |
| 2 | 16.1 | 30.1 | 208.4 | 17.90 | 27.70 | 204.7 | 0.90 | 1.09 | 1.02 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jasiński, R.; Stebel, K.; Domin, J. Application of the DIC Technique to Remote Control of the Hydraulic Load System. Remote Sens. 2020, 12, 3667. https://doi.org/10.3390/rs12213667
Jasiński R, Stebel K, Domin J. Application of the DIC Technique to Remote Control of the Hydraulic Load System. Remote Sensing. 2020; 12(21):3667. https://doi.org/10.3390/rs12213667
Chicago/Turabian StyleJasiński, Radosław, Krzysztof Stebel, and Jarosław Domin. 2020. "Application of the DIC Technique to Remote Control of the Hydraulic Load System" Remote Sensing 12, no. 21: 3667. https://doi.org/10.3390/rs12213667
APA StyleJasiński, R., Stebel, K., & Domin, J. (2020). Application of the DIC Technique to Remote Control of the Hydraulic Load System. Remote Sensing, 12(21), 3667. https://doi.org/10.3390/rs12213667