On the Frequency Sweep Rate Estimation in Airborne FMCW SAR Systems




Abstract
1. Introduction
2. Main Rationale of the FSRETC Algorithm
3. Experiments: Description and Aim
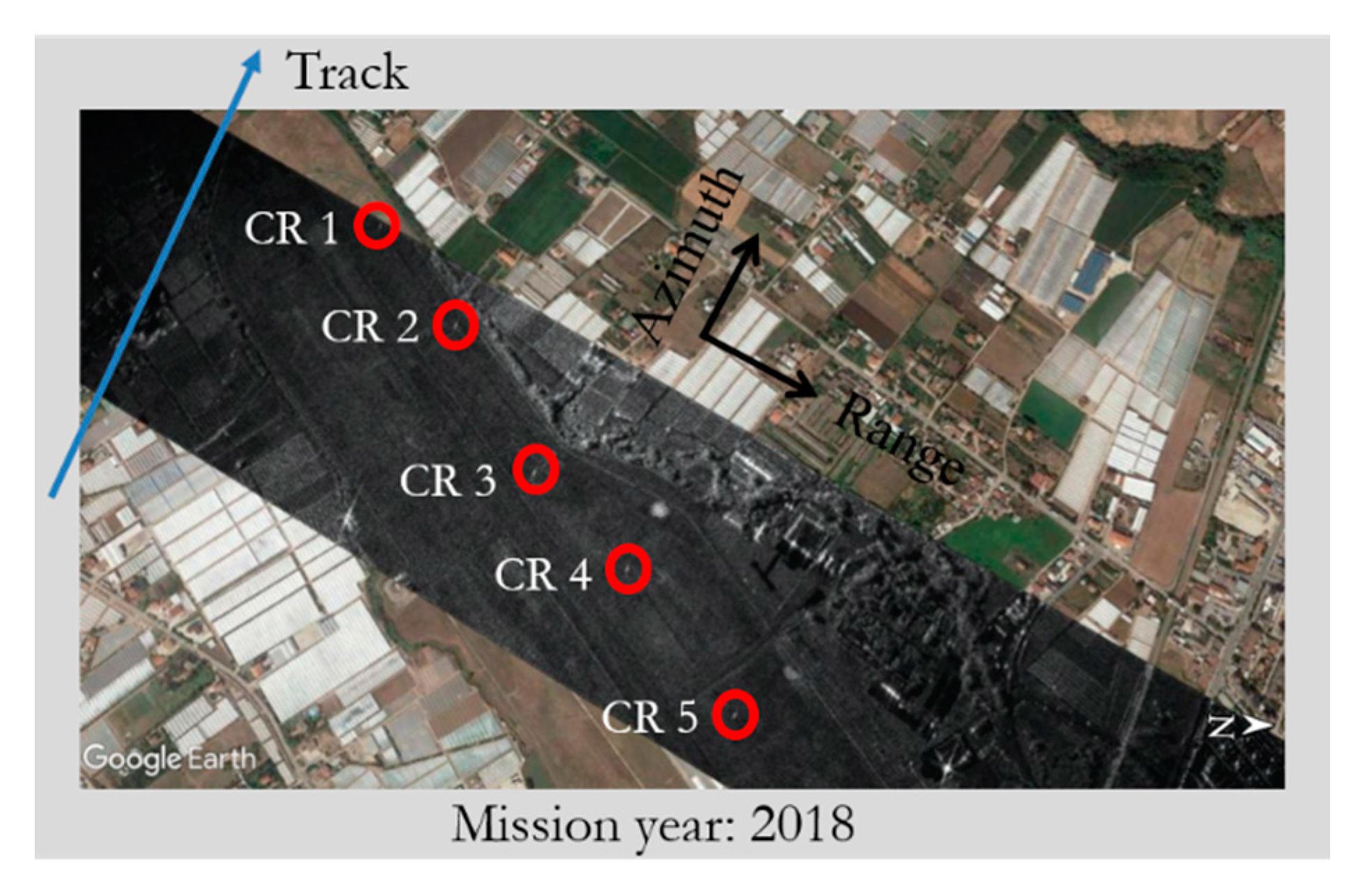
- Experiments 1. The experiments are conducted with the same dataset considered in [15]. In particular, one acquisition (carried out in 2018) is considered. Moreover, 5 CRs are used for the estimate. With respect to [15], different starting FSR values are considered. In particular, in the experiments 1A, 1B, 1C three different starting FSR values are used. The experiment is aimed at assessing the robustness of the algorithm with respect to the starting FSR value used to boot the estimation procedure. The experimental scenario is summarized in Figure 2.
- Experiments 2. Similarly to the Experiments 1, we have carried out three experiments, named 2A, 2B and 2C. The three experiments are conducted with the same dataset considered in the Experiments 1, using the same number of CRs (that is, 5). Moreover, the three starting FSR values of the experiments 1A, 1B and 1C, respectively, are used. With respect to the Experiments 1, the SAR image used for the estimation procedure is oversampled in the range direction. The experiments are aimed at verifying if range oversampling of the data improves the obtained estimates. The experimental scenario, equal to that of Experiment 1, is summarized in Figure 2 too.
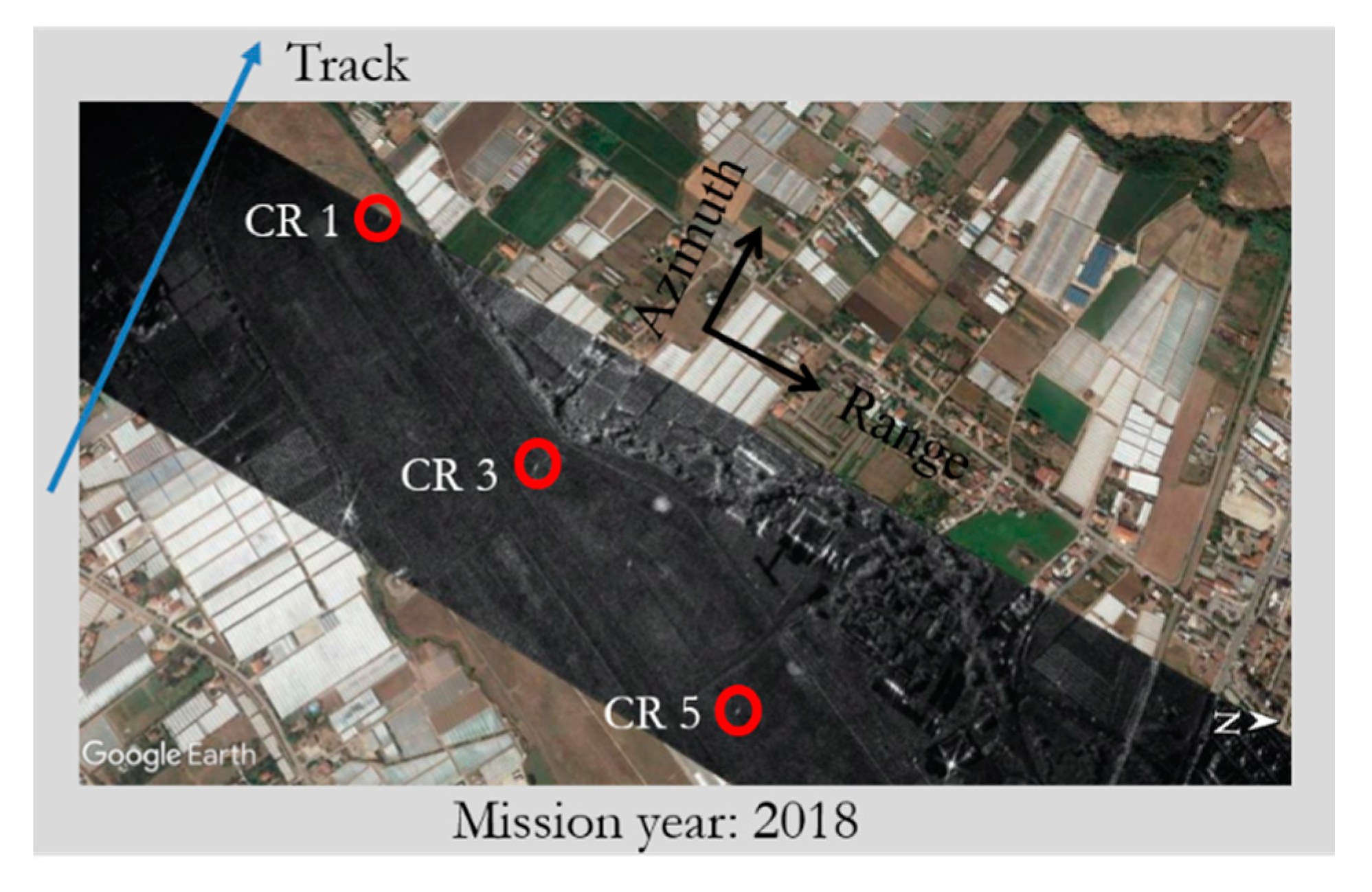
- Experiment 3. The experiment is conducted with the same dataset considered in [15]. With respect to [15], a smaller number of CRs (that is, 3 rather than 5) are used for the estimation procedure. The experiment is aimed at verifying the robustness of the FSRETC algorithm with respect to variations of the number of CRs. The experimental scenario is summarized in Figure 3.
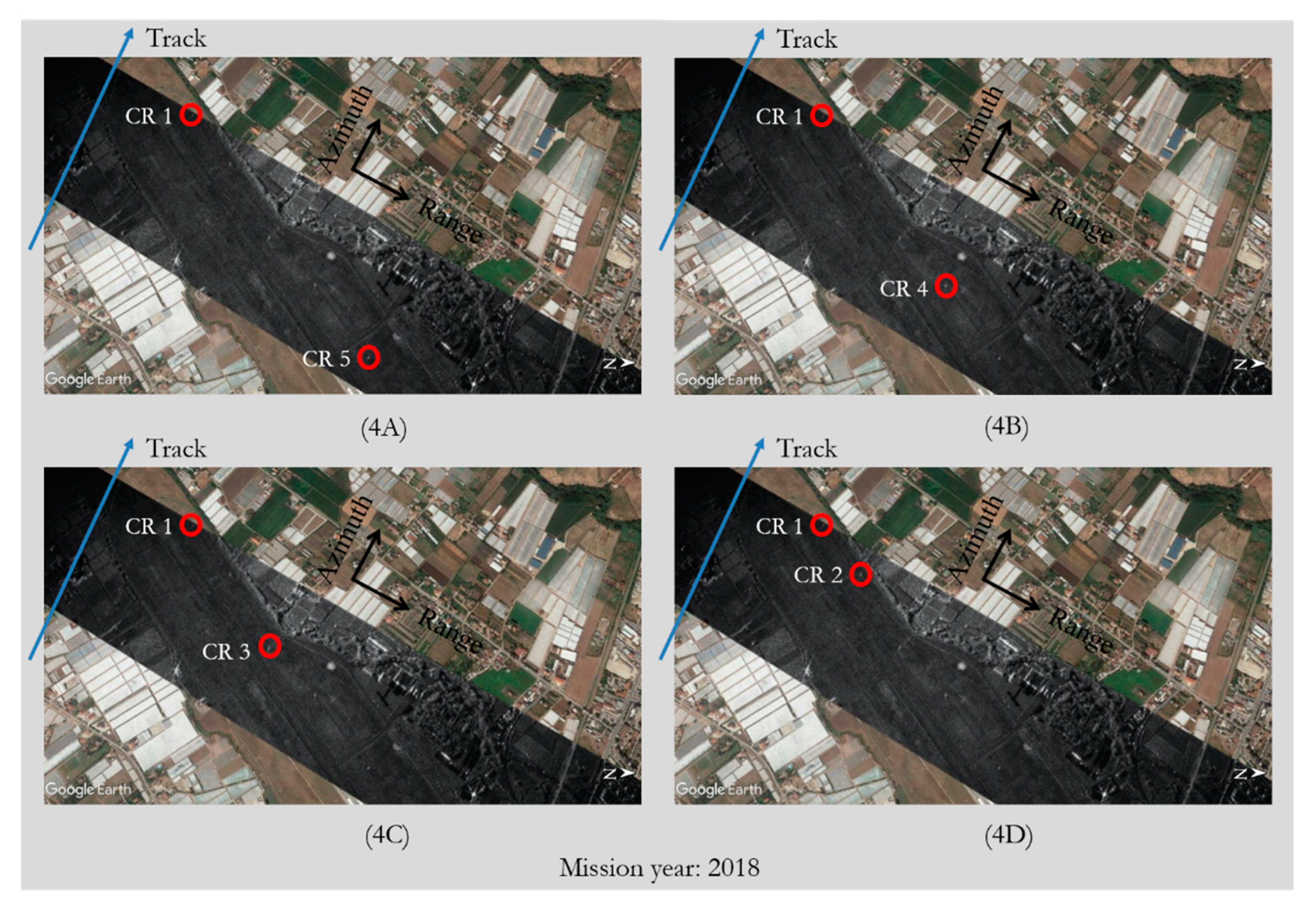
- Experiments 4. The experiments are conducted with the same dataset considered in [15] and in the Experiment 3. With respect to the latter experiment, an even smaller number of CRs (that is, 2) are used for the estimation procedure. Moreover, in the experiments 4A, 4B, 4C and 4D we have progressively reduced the range distance between the two used CRs. More specifically, in these four experiments we have considered the following couples of CRs: CR1 and CR5, CR1 and CR4, CR1 and CR3, CR1 and CR2, respectively. The experiments are aimed at verifying the robustness of the FSRETC algorithm with respect to variations of number and positions of CRs. The experimental scenario of these experiments is summarized in Figure 4.
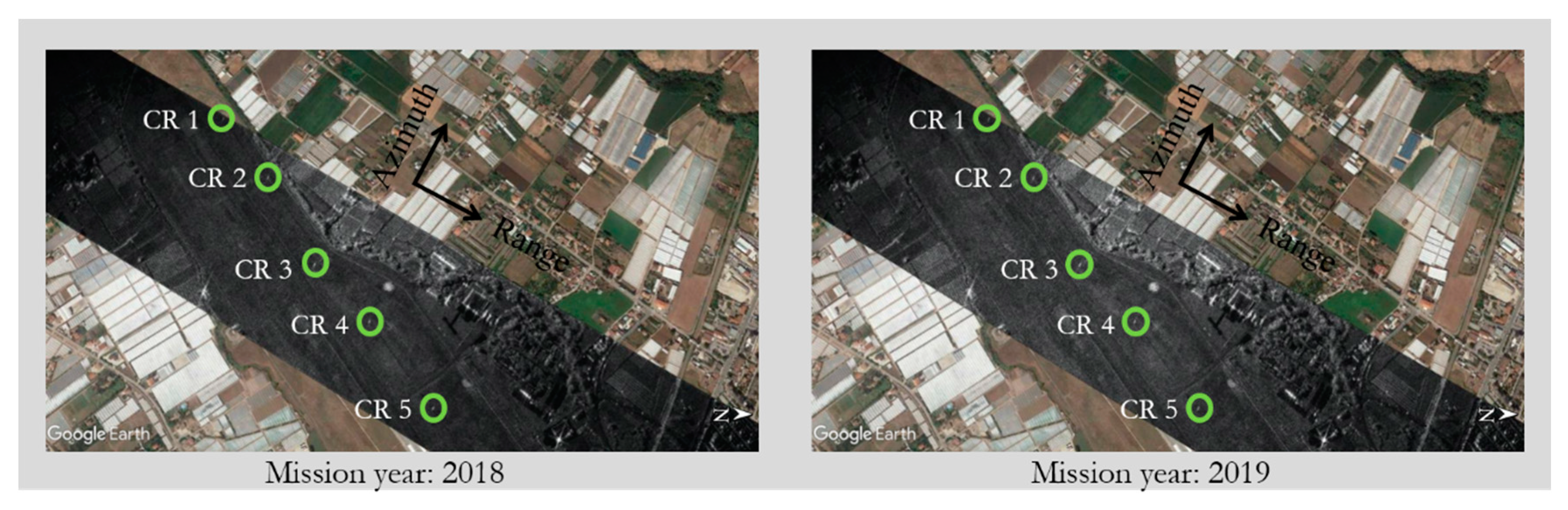
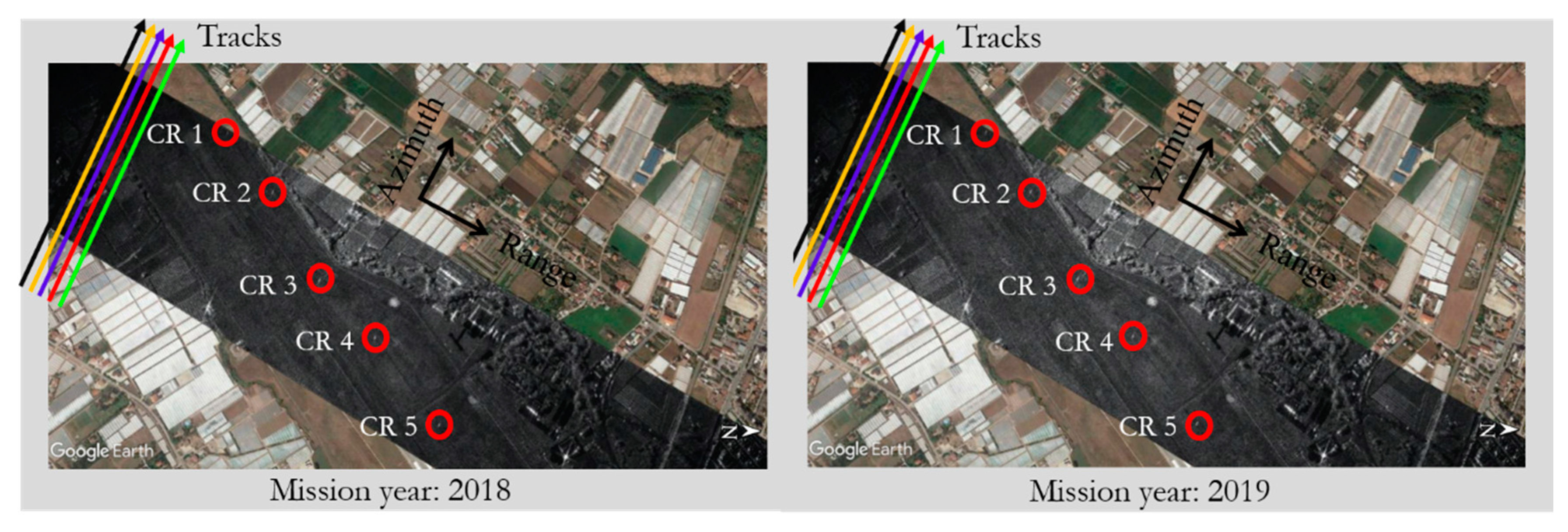
- Experiment 5. The experiment is conducted with a dataset of 5 SAR acquisitions (including that considered in [15]) carried out in the same day and over the same area considered in [15]. The number of CRs used for the estimate is the same as that considered in [15], namely 5. The experiment is aimed at analyzing the robustness over time of the estimates provided by the FSRETC algorithm. The experimental scenario is summarized in Figure 5 (left panel).
- Experiment 6. The experiment is conducted with a dataset of 5 SAR acquisitions carried out over the same area considered in [15], but 14 months later. The number of CRs used for the estimate is the same as that considered in [15] (that is, 5). The experiment is aimed at analyzing the robustness over time of the estimates provided by the FSRETC algorithm. The experimental scenario, which is equal to that of Experiment 5 apart from the dates of the acquisitions, is summarized in Figure 5 (right panel).
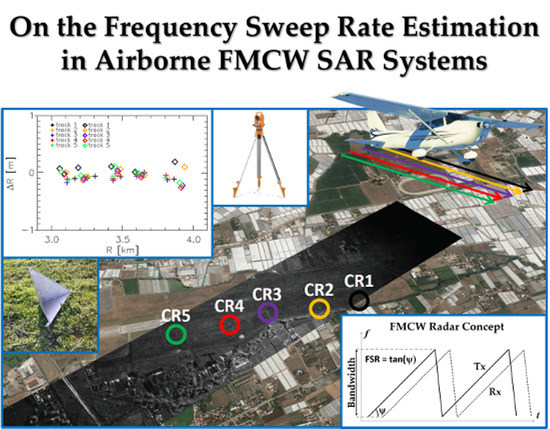
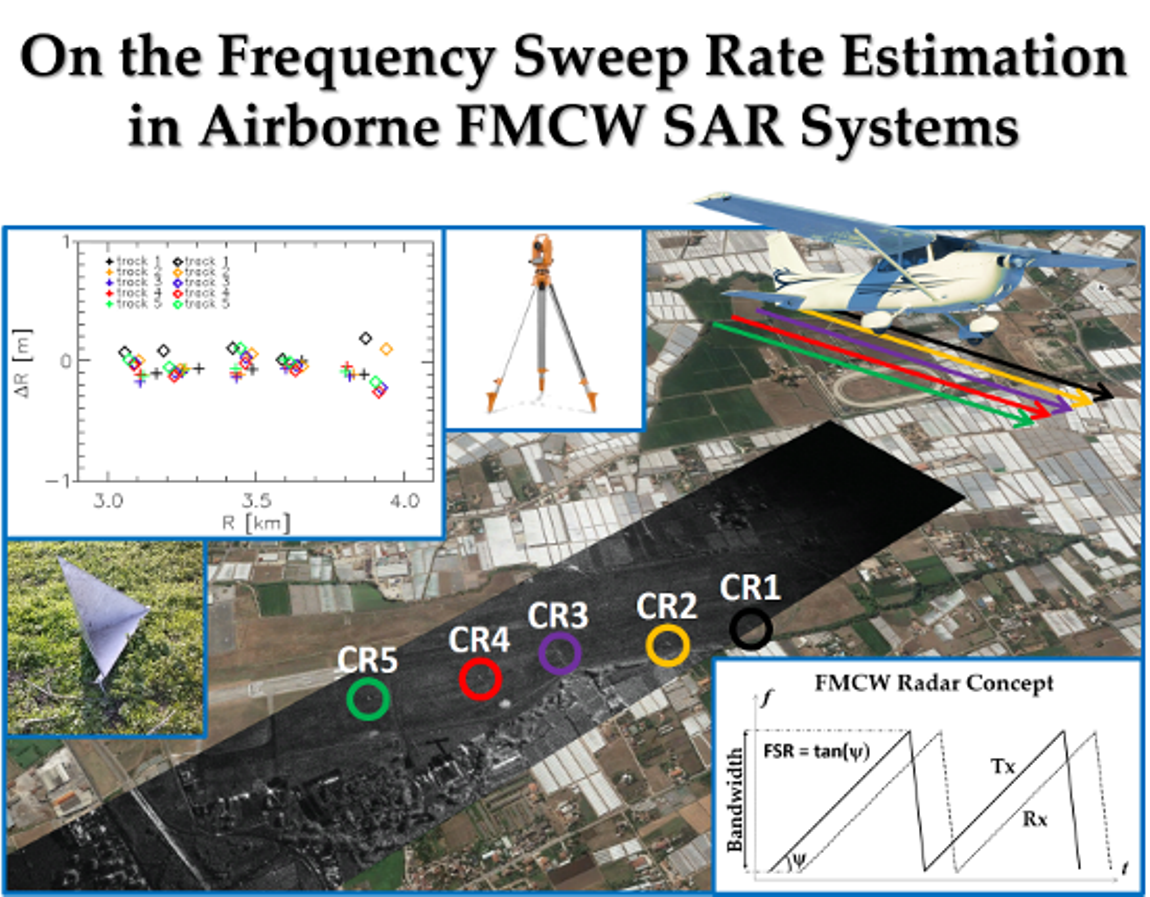
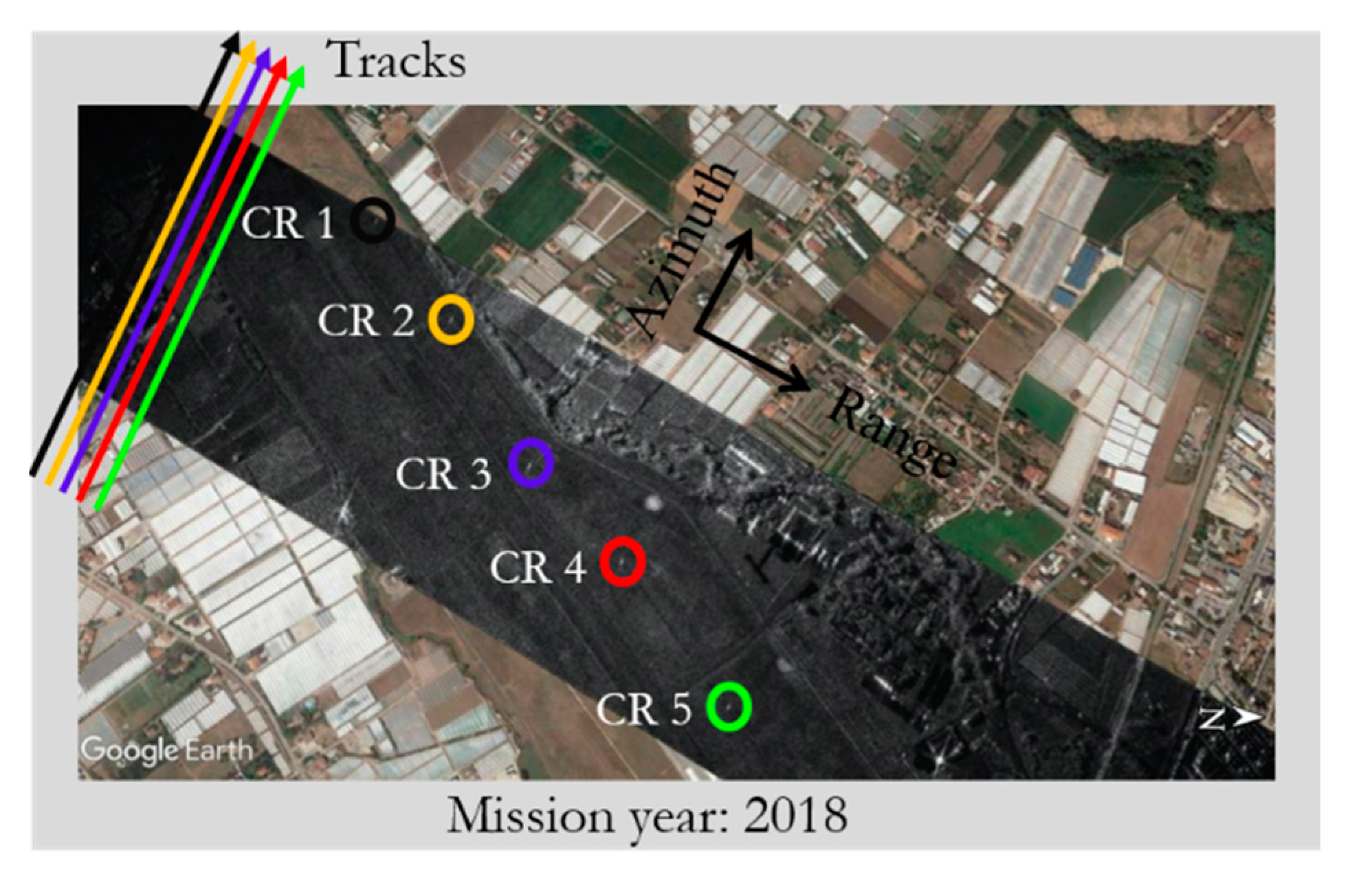
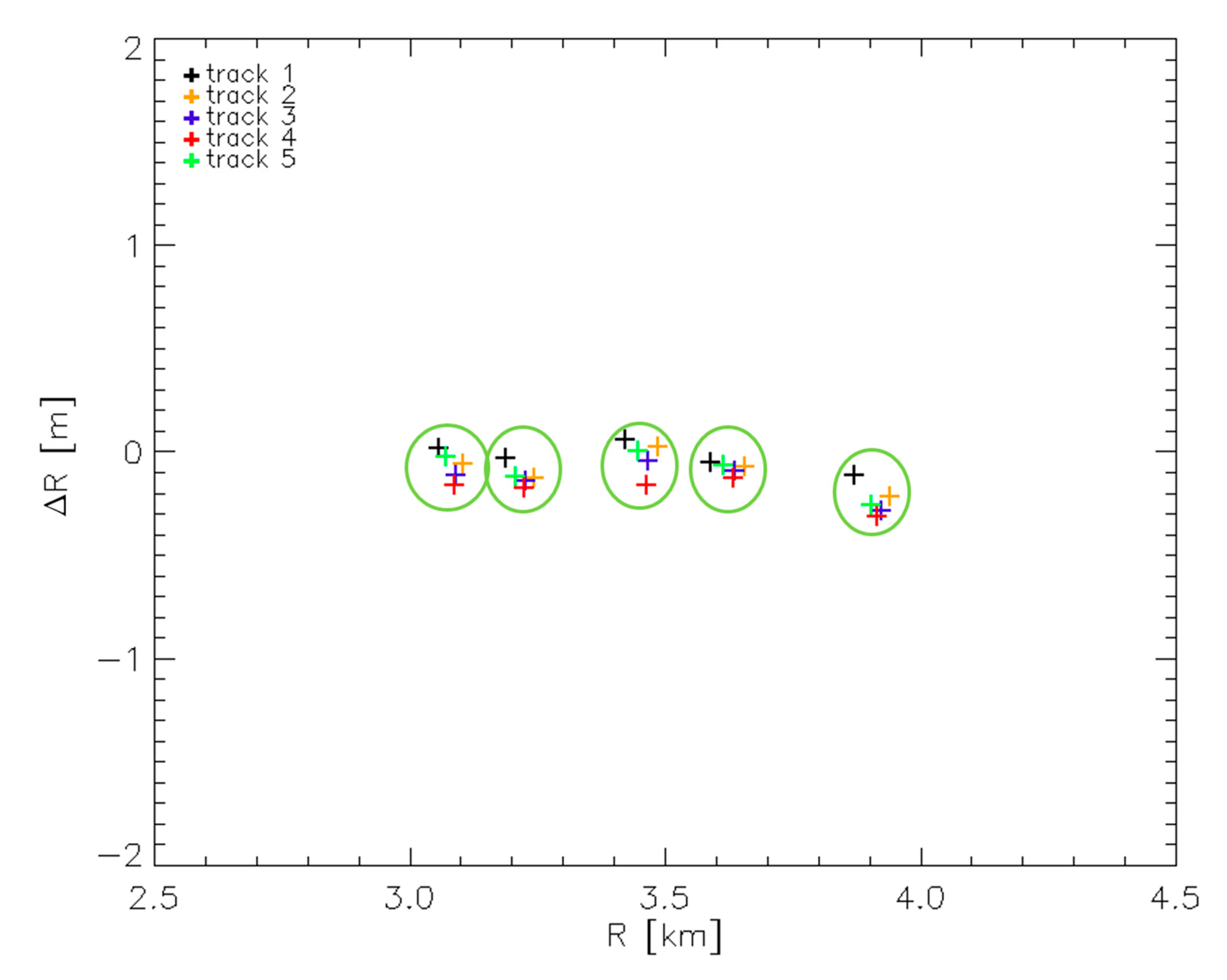
- Experiment 7. The experiment is conducted with the same dataset considered in the Experiment 5. That is, five acquisitions (carried out in 2018) are considered. In contrast to the Experiment 5, for each acquisition we have considered only one CR. Notwithstanding, overall, all the 5 CRs are used for the estimate, since for each acquisition a different CR is considered. The experimental scenario is summarized in Figure 6, where the colors of the flight tracks and the circles show the correspondence between the acquisitions and the used CRs. In this way we simulate an acquisition scenario, not achievable with the available dataset, of 5 parallel flight paths in which only one CR is deployed on the observed area: through the different acquisitions the CR is illuminated from different view angles. The experiment is aimed at providing a preliminary evidence that the FSRETC algorithm can be successfully applied with only one CR by exploiting repeat pass acquisitions.
4. Experiments: Results
4.1. Experiments 1
4.2. Experiments 2
4.3. Experiment 3
4.4. Experiments 4
4.5. Experiment 5
4.6. Experiment 6
4.7. Experiment 7
5. Discussion
6. Conclusions and Future Developments
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Franceschetti, G.; Lanari, R. Synthetic Aperture Radar Processing; CRC Press: Boca Raton, FL, USA, 2018; ISBN 9781351412018. [Google Scholar]
- Perna, S.; Esposito, C.; Amaral, T.; Berardino, P.; Jackson, G.; Moreira, J.; Pauciullo, A.; Junior, E.V.; Wimmer, C.; Lanari, R. The InSAeS4 airborne X-band interferometric SAR system: A first assessment on its imaging and topographic mapping capabilities. Remote Sens. 2016, 8, 40. [Google Scholar] [CrossRef]
- Magnard, C.; Frioud, M.; Small, D.; Brehm, T.; Essen, H.; Meier, E. Processing of MEMPHIS Ka-band multibaseline interferometric SAR data: From raw data to digital surface models. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2927–2941. [Google Scholar] [CrossRef]
- Pinheiro, M.; Reigber, A.; Scheiber, R.; Prats-Iraola, P.; Moreira, A. Generation of highly accurate DEMs over flat areas by means of dual-frequency and dual-baseline airborne SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4361–4390. [Google Scholar] [CrossRef]
- Pinheiro, M.; Amao-Oliva, J.; Scheiber, R.; Jaeger, M.; Horn, R.; Keller, M.; Fischer, J.; Reigber, A. Dual-Frequency Airborne SAR for Large Scale Mapping of Tidal Flats. Remote Sens. 2020, 12, 1827. [Google Scholar] [CrossRef]
- Du Plessis, O.R.; Nouvel, J.F.; Baqué, R.; Bonin, G.; Dreuillet, P.; Coulombeix, C.; Oriot, H. ONERA SAR facilities. IEEE Aerosp. Electron. Syst. Mag. 2011, 26, 24–30. [Google Scholar] [CrossRef]
- Perna, S.; Alberti, G.; Berardino, P.; Bruzzone, L.; Califano, D.; Catapano, I.; Ciofaniello, L.; Donini, E.; Esposito, C.; Facchinetti, C.; et al. The ASI integrated sounder-SAR system operating in the UHF-VHF bands: First results of the 2018 helicopter-borne morocco desert campaign. Remote Sens. 2019, 11, 1845. [Google Scholar] [CrossRef]
- Aguasca, A.; Acevo-Herrera, R.; Broquetas, A.; Mallorqui, J.J.; Fabregas, X. ARBRES: Light-weight CW/FM SAR sensors for small UAVs. Sensors 2013, 13, 3204–3216. [Google Scholar] [CrossRef] [PubMed]
- Rosen, P.A.; Hensley, S.; Wheeler, K.; Sadowy, G.; Miller, T.; Shaffer, S.; Muellerschoen, R.; Jones, C.; Madsen, S.; Zebker, H. UAVSAR: New NASA Airborne SAR System for Research. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 21–28. [Google Scholar] [CrossRef]
- Oré, G.; Alcântara, M.S.; Góes, J.A.; Oliveira, L.P.; Yepes, J.; Teruel, B.; Castro, V.; Bins, L.S.; Castro, F.; Luebeck, D.; et al. Crop growth monitoring with drone-borne DInSAR. Remote Sens. 2020, 12, 615. [Google Scholar] [CrossRef]
- Luebeck, D.; Wimmer, C.; Moreira, L.F.; Alcântara, M.; Oré, G.; Góes, J.A.; Oliveira, L.P.; Teruel, B.; Bins, L.S.; Gabrielli, L.H.; et al. Drone-borne differential SAR interferometry. Remote Sens. 2020, 12, 778. [Google Scholar] [CrossRef]
- Perna, S.; Soldovieri, F.; Amin, M. Editorial for special issue “radar imaging in challenging scenarios from smart and flexible platforms”. Remote Sens. 2020, 12, 1272. [Google Scholar] [CrossRef]
- Richards, M.A.; Scheer, J.A.; Holm, W.A. Principles of Modern Radar: Basic Principles; Scitech Publishing: Raleigh, NC, USA, 2010; ISBN 9781613531488. [Google Scholar]
- Meta, A.; Hoogeboom, P.; Ligthart, L.P. Signal processing for FMCW SAR. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3519–3532. [Google Scholar] [CrossRef]
- Esposito, C.; Natale, A.; Palmese, G.; Berardino, P.; Perna, S. Geometric distortions in FMCW SAR images due to inaccurate knowledge of electronic radar parameters: Analysis and correction by means of corner reflectors. Remote Sens. Environ. 2019, 232, 111289. [Google Scholar] [CrossRef]
- Esposito, C.; Natale, A.; Palmese, G.; Berardino, P.; Lanari, R.; Perna, S. On the Capabilities of the Italian Airborne FMCW AXIS InSAR System. Remote Sens. 2020, 12, 539. [Google Scholar] [CrossRef]
- Kay, S.M. Kay Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall, Inc., Division of Simon and Schuster One Lake Street: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Esposito, C.; Gifuni, A.; Perna, S. Measurement of the Antenna Phase Center Position in Anechoic Chamber. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 2183–2187. [Google Scholar] [CrossRef]
- Berardino, P.; Esposito, C.; Natale, A.; Lanari, R.; Perna, S. Airborne SAR Focusing in the Presence of Severe Squint Variations. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Rabus, B.; Eineder, M.; Roth, A.; Bamler, R. The shuttle radar topography mission—A new class of digital elevation models acquired by spaceborne radar. ISPRS J. Photogramm. Remote Sens. 2003, 57, 241–262. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Parameters | |
|---|---|
| Radar technology | FMCW |
| Transmitted power | 5 W |
| Carrier frequency | 9.55 GHz |
| Bandwidth | 200 MHz |
| Pulse repetition frequency | 1200 Hz |
| Pulse repetition interval | 833.33 µs |
| Pulse duration | 600.184 µs |
| Recording data time | 605.00 µs |
| Sampling rate | 25 MHz |
| Number of range lines (Nr) | 7562 |
| Range resolution | 75 cm |
| Antennas | |
| Number of RX antennas | 2 |
| Number of TX antennas | 1 |
| Polarization | VV |
| Antennas | Installed at right sides of the fuselage |
| Absolute Accuracy Specifications (RMS) + of IMU * | |
| Position | 0.05 m |
| Velocity | 0.005 m/s |
| Roll & Pitch | 0.005° |
| True Heading | 0.008° |
| Mean flight altitude | 2500 m |
| Mean platform velocity | 48 m/s |
| Mission Year | Parameters Exploited to Focus the Starting SAR Image | FSRETC Estimates | RRS [m] | RRSN | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Number of Exploited CRs | Number of Exploited Tracks | Starting FSR [s−2] | Starting Range Sampling Step | Obtained FSR [s−2] | Obtained Range Sampling Step | Bias [m] | |||||
| Experiment in [15] | 2018 | 5 | 1 | 3.30371 × 1011 | 0.75000 | 3.33598 × 1011 | 0.74274 | 0.26 | - | ||
| Experiment 1A | 2018 | 5 | 1 | 3.33156 × 1011 | 0.74373 | 3.33581 × 1011 | 0.74278 | −0.02 | ([15]-1A) −0.3 | 0.4 | |
| Experiment 1B | 2018 | 5 | 1 | 3.36521 × 1011 | 0.73629 | 3.33374 × 1011 | 0.74324 | −2.58 | (1B-1A) 3.47 | 4.6 | |
| Experiment 1C | 2018 | 5 | 1 | 3.29858 × 1011 | 0.75116 | 3.33628 × 1011 | 0.74267 | 0.56 | (1C-1A) −0.83 | 1.1 | |
| Experiment 2A | 2018 | 5 | 1 | 3.33156 × 1011 | 0.74373 | 3.33529 × 1011 | 0.74289 | −0.29 | (2A-1A) 0.83 | 1.1 | |
| Experiment 2B | 2018 | 5 | 1 | 3.36521 × 1011 | 0.73629 | 3.33539 × 1011 | 0.74287 | −0.22 | (2B-2A) −0.15 | 0.2 | |
| Experiment 2C | 2018 | 5 | 1 | 3.29858 × 1011 | 0.75116 | 3.33539 × 1011 | 0.74287 | −0.15 | (2C-2A) −0.15 | 0.2 | |
| Experiment 3 | 2018 | 3 | 1 | 3.33156 × 1011 | 0.74373 | 3.33524 × 1011 | 0.74291 | −0.35 | (3-2A) 0.15 | 0.2 | |
| Experiment 4A | 2018 | 2 | 1 | 3.33156 × 1011 | 0.74373 | 3.33523 × 1011 | 0.74291 | −0.38 | (4A-2A) 0.15 | 0.2 | |
| Experiment 4B | 2018 | 2 | 1 | 3.33156 × 1011 | 0.74373 | 3.33504 × 1011 | 0.74295 | −0.56 | (4B-2A) 0.45 | 0.6 | |
| Experiment 4C | 2018 | 2 | 1 | 3.33156 × 1011 | 0.74373 | 3.33462 × 1011 | 0.74304 | −0.96 | (4C-2A) 1.13 | 1.5 | |
| Experiment 4D | 2018 | 2 | 1 | 3.33156 × 1011 | 0.74373 | 3.33398 × 1011 | 0.74318 | −1.56 | (4D-2A) 2.19 | 2.9 | |
| Experiment 5 | 2018 | 5 | 5 | 3.33156 × 1011 | 0.74373 | 3.33483 × 1011 | 0.74300 | −0.77 | (5-2A) 0.83 | 1.1 | |
| Experiment 6 | 2019 | 5 | 5 | 3.33156 × 1011 | 0.74373 | 3.33501 × 1011 | 0.74296 | −0.45 | (6-5) −0.30 | 0.6 | |
| Experiment 7 | 2018 | 5 | 5 | 3.33156 × 1011 | 0.74373 | 3.33574 × 1011 | 0.74279 | 0.17 | (7-2A) −0.75 | 1.0 | |
| Mission Year | Processing Stage * | Vertical Spreading [cm] | Horizontal Spreading [m] | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Cr1 | Cr2 | Cr3 | Cr4 | Cr5 | Cr1 | Cr2 | Cr3 | Cr4 | Cr5 | |||
| Figure 8 | 2018 | b | 2 | 5.6 | 10.7 | 2.9 | 4.0 | 23.14 | 23.26 | 24.22 | 24.24 | 24.49 |
| Figure 9 | 2018 | a | 2.5 | 1.4 | 3.2 | 3.3 | 2.8 | 23.14 | 23.26 | 24.22 | 24.24 | 24.49 |
| Figure 10 | 2019 | b | 4.5 | 1.3 | 18.2 | 18.4 | 17.8 | 18.12 | 21.42 | 23.72 | 25.27 | 26.28 |
| Figure 11 | 2019 | a | 7 | 5.4 | 8.5 | 3.1 | 7.8 | 18.12 | 21.42 | 23.72 | 25.27 | 26.28 |
| Figure 13 † | 2018/2019 | a | 4.0 | 8.2 | 5.4 | 3.3 | 20.4 | 18.12 | 21.42 | 23.72 | 25.27 | 26.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esposito, C.; Berardino, P.; Natale, A.; Perna, S. On the Frequency Sweep Rate Estimation in Airborne FMCW SAR Systems. Remote Sens. 2020, 12, 3448. https://doi.org/10.3390/rs12203448
Esposito C, Berardino P, Natale A, Perna S. On the Frequency Sweep Rate Estimation in Airborne FMCW SAR Systems. Remote Sensing. 2020; 12(20):3448. https://doi.org/10.3390/rs12203448
Chicago/Turabian StyleEsposito, Carmen, Paolo Berardino, Antonio Natale, and Stefano Perna. 2020. "On the Frequency Sweep Rate Estimation in Airborne FMCW SAR Systems" Remote Sensing 12, no. 20: 3448. https://doi.org/10.3390/rs12203448
APA StyleEsposito, C., Berardino, P., Natale, A., & Perna, S. (2020). On the Frequency Sweep Rate Estimation in Airborne FMCW SAR Systems. Remote Sensing, 12(20), 3448. https://doi.org/10.3390/rs12203448