UAV-Borne LiDAR Crop Point Cloud Enhancement Using Grasshopper Optimization and Point Cloud Up-Sampling Network




Abstract
1. Introduction
- (1)
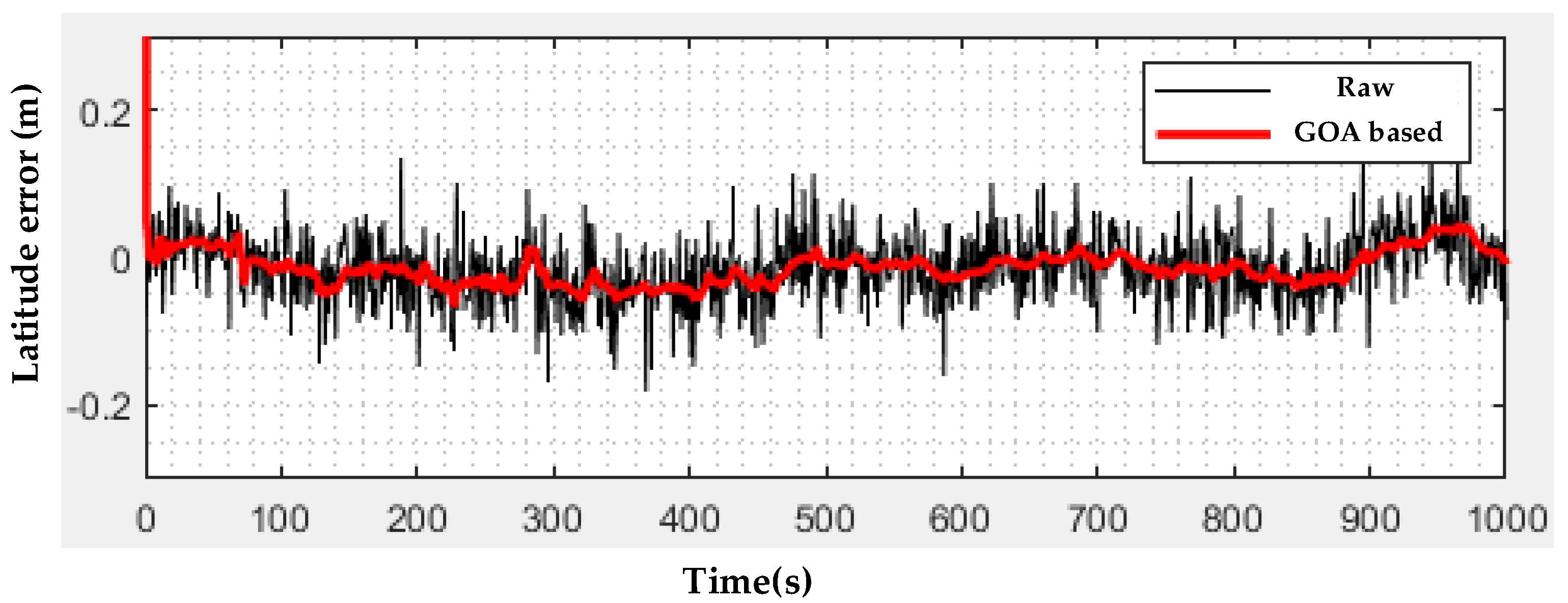
- In order to obtain the optimal solution of the initial parameters of the Kalman filter quickly and accurately, GOA took the sum of the longitude and latitude error variances as the fitness function to find the optimal solution to iterate the system noise variance matrix Q and the measurement noise variance matrix R. Based on the Q and R matrices from GOA, the positioning error of the UAV-borne LiDAR scanning system was greatly reduced; meanwhile, the computing burden was decreased, and the accuracy of point cloud data acquisition was improved;
- (2)
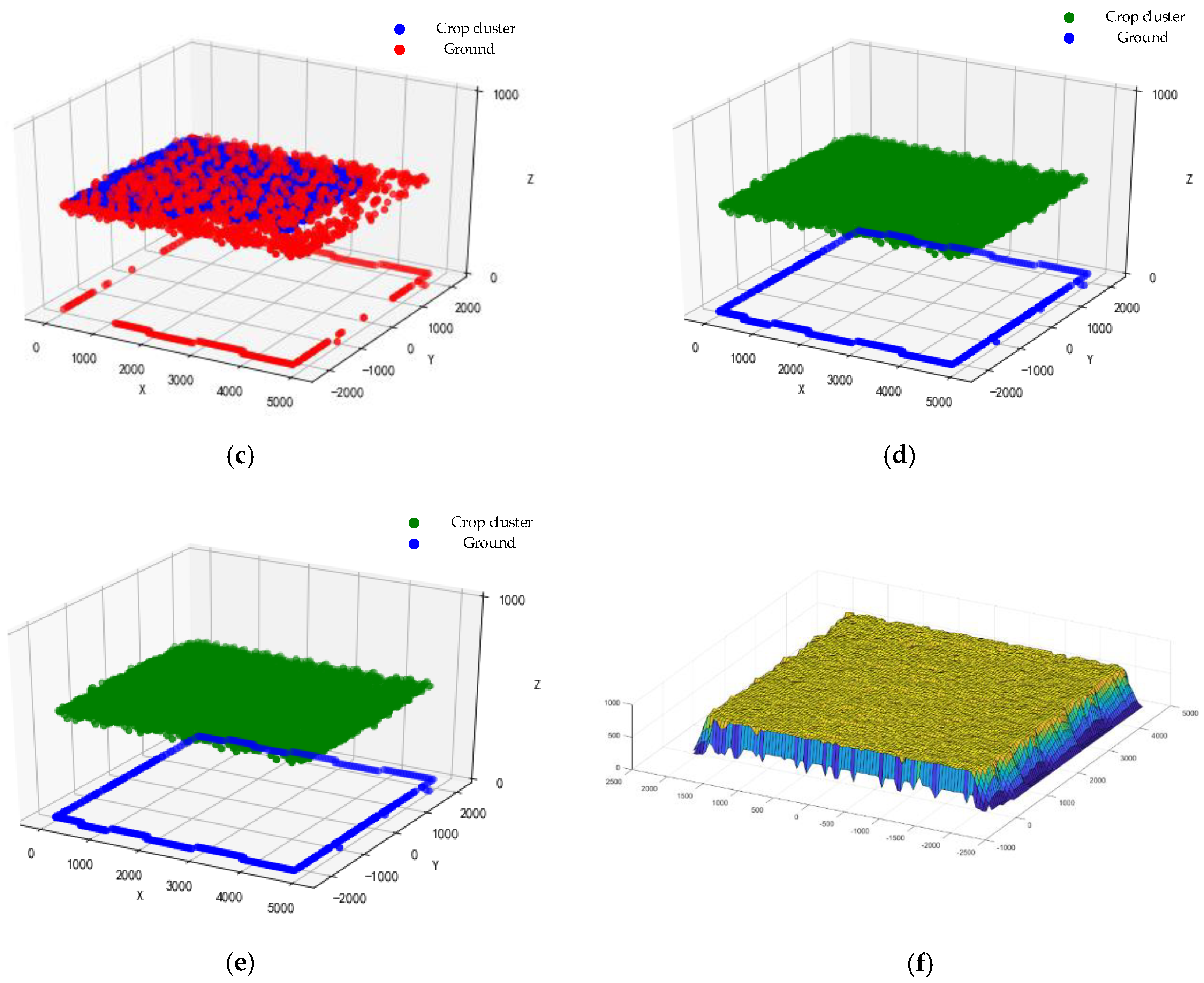
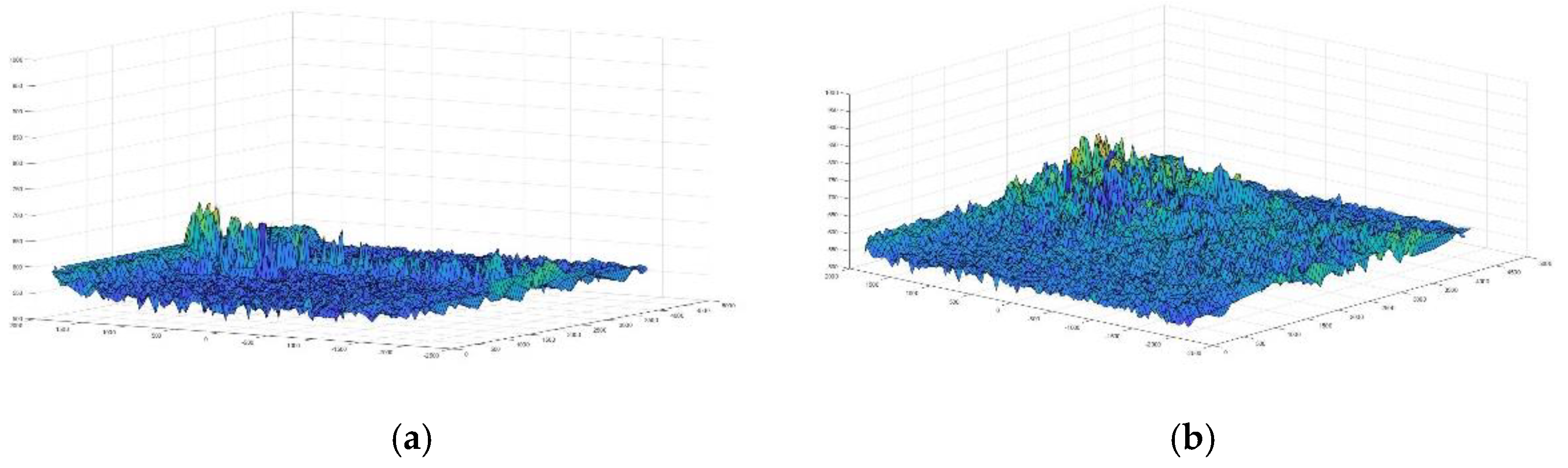
- The density clustering algorithm was improved by the linear decreasing particle swarm optimization (PSO) algorithm. In order to solve the problem of sparse density, in this paper, a pre-trained PU-net was used for enhancing the point cloud density of the point cloud data obtained by UAV-borne LiDAR. Experiments have verified that the enhanced point cloud data retain the features of the raw point cloud data.
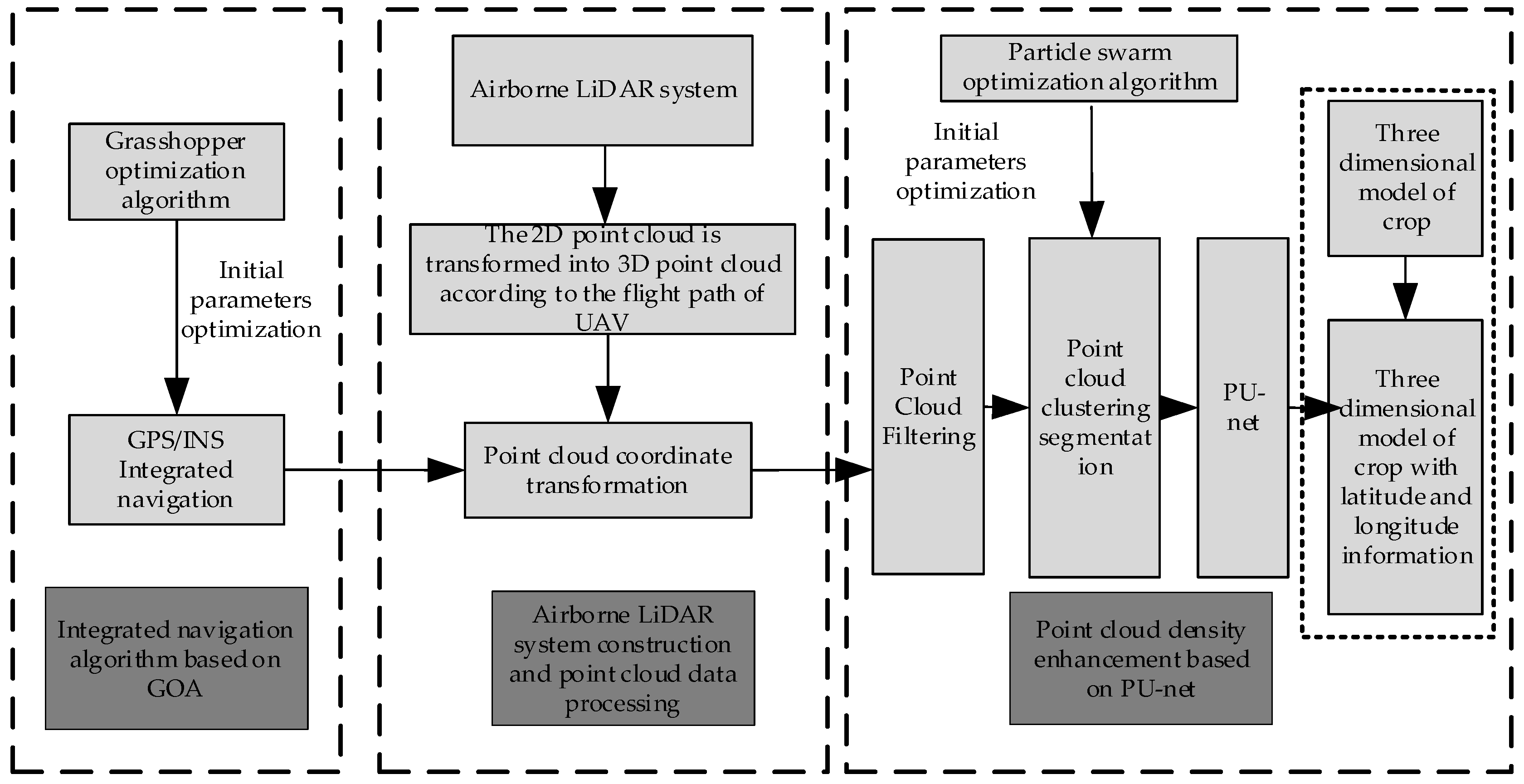
2. Framework of the Proposed Method
- (1)
- Firstly, the GPS/INS integrated navigation information fusion framework was built by the Kalman filter. Then, the GOA was used to optimize the initial parameters of the Kalman filter, and the optimal solution was returned to the Kalman filter to estimate the output state of the GPS/INS integrated navigation system;
- (2)
- After data acquisition, the point cloud data was transformed into the WGS-84 coordinate system from the LiDAR coordinate system. Then the point cloud data was filtered for removing the irrelevant points. Finally, the two-dimensional point cloud data was transformed into a three-dimensional point cloud according to the flight trajectory of UAV;
- (3)
- The PSO algorithm was employed to optimize the density clustering algorithm for crop point cloud segment. Then the crop point cloud data was fed into the trained network to obtain the crop point cloud data after the point cloud density was enhanced. Finally, the point cloud data was reconstructed in three dimensions.
3. Integrated Navigation Enhancement Based on GOA
3.1. Framework of GPS/INS Integrated Navigation
3.2. Grasshopper Optimization Algorithm (GOA)
3.3. Kalman Filter Optimization Using GOA
4. UAV-Borne LiDAR System Construction and Point Cloud Data Processing
4.1. UAV-Borne LiDAR System
4.2. Coordinate Transformation of Point Cloud Data
5. Point Cloud Density Enhancement Based on PU-Net
5.1. Point Cloud Preprocessing
5.2. Point Cloud Density Clustering Segmentation Method Based on PSO Algorithm
5.3. Point Cloud Density
5.4. Density Enhancement Using Point Cloud Up-Sampling Network (PU-Net)
6. Results
6.1. GOA-Based Integrated Navigation
6.2. PSO-Based Point Cloud Clustering Segmentation
6.3. Density Enhancement with PU-Net
7. Discussion
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- McManamon, P.F. Review of LiDAR: A historic, yet emerging, sensor technology with rich phenomenology. Opt. Eng. 2012, 51, 060901. [Google Scholar] [CrossRef]
- Vázquez-Arellano, M.; Griepentrog, H.W.; Reiser, D.; Paraforos, D.S. 3-D Imaging Systems for Agricultural Applications—A Review. Sensors 2016, 16, 618. [Google Scholar] [CrossRef] [PubMed]
- Lovell, J.L.; Jupp, D.L.B.; Newnham, G.J. Measuring tree stem diameters using intensity profiles from ground-based scanning LiDAR from a fixed viewpoint. ISPRS J. Photogramm. Remote Sens. 2011, 66, 46–55. [Google Scholar] [CrossRef]
- Strahler, A.H.; Jupp, D.L.B.; Woodcock, C.E. Retrieval of forest structural parameters using a ground-based LiDAR instrument (Echidna). Can. J. Remote Sens. 2008, 34, 426–440. [Google Scholar] [CrossRef]
- Zheng, G.; Moskal, L.M.; Kim, S.H. Retrieval of effective leaf area index in heterogeneous forests with terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2013, 51, 777–786. [Google Scholar] [CrossRef]
- Lai, X.D.; Liu, Y.S.; Li, Y.X. Application status and development of point cloud density characteristics of airborne LiDAR. Geospat. Inf. 2018, 16, 1–5. [Google Scholar]
- Quan, W.; Gong, X.; Fang, J.; Li, J. Prospects of INS/CNS/GNSS Integrated Navigation Technology. In INS/CNS/GNSS Integrated Navigation Technology; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Fu, B.; Liu, J.; Wang, Q. Multi-sensor integrated navigation system for ships based on adaptive Kalman filter. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–9 August 2019. [Google Scholar]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR integrated navigation system for urban and indoor environments using hybrid scan matching algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [PubMed]
- Shabani, M.; Gholami, A.; Davari, N. Asynchronous direct Kalman filtering approach for underwater integrated navigation system. Nonlinear Dyn. 2015, 80, 71–85. [Google Scholar] [CrossRef]
- Zhang, G.; Hsu, L.T. Intelligent GNSS/INS integrated navigation system for a commercial UAV flight control system. Aerosp. Sci. Technol. 2018, 80, 368–380. [Google Scholar] [CrossRef]
- Yu, H.; Han, H.; Wang, J.; Xiao, H.; Wang, C. Single-frequency GPS/BDS RTK and INS ambiguity resolution and positioning performance enhanced with positional polynomial fitting constraint. Remote Sens. 2020, 12, 2374. [Google Scholar] [CrossRef]
- Norouz, M.; Ebrahimi, M.; Arbabmir, M. Modified Unscented Kalman Filter for improving the integrated navigation system. In Proceedings of the 25th Iranian Conference on Electrical Engineering, Tehran, Iran, 2–4 May 2017. [Google Scholar]
- Goldberg, D. Genetic Algorithms in Search, Optimization and Machine Learing; Addison-Wesley: Boston, MA, USA, 1989. [Google Scholar]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the 6th International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Colorni, A.; Dorigo, M.; Maniezzo, V. Distributed optimization by ant colonies. In Proceedings of the 1st European Conference on Artificial Life, Paris, France, 11–13 December 1991; pp. 134–142. [Google Scholar]
- Yang, X. A new metaheuristic bat-inspired algorithm. In Proceedings of Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); Springer: Berlin/Heidelberg, Germany, 2010; pp. 65–74. [Google Scholar]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimisation algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef]
- Feng, H.; Ni, H.; Zhao, R.; Zhu, X. An enhanced grasshopper optimization algorithm to the Bin packing problem. J. Control Sci. Eng. 2020, 2020, 3894987. [Google Scholar] [CrossRef]
- Chen, Y.; Zhou, L.; Bouguila, N.; Wang, C.; Chen, Y.; Du, J. BLOCK-DBSCAN: Fast clustering for large scale data. Pattern Recognit. 2020, 109, 107624. [Google Scholar] [CrossRef]
- Kedzierski, M.; Fryskowska, A. Methods of laser scanning point clouds integration in precise 3D building modelling. Measurement 2015, 74, 221–232. [Google Scholar] [CrossRef]
- Rupink, B.; Mongus, D.; Zalik, B. Point density evaluation of airborne LiDAR datasets. J. Univers. Comput. Sci. 2015, 21, 587–603. [Google Scholar]
- Huang, H.; Shi, W.U.; Gong, M. Edge-aware point set resampling. ACM Trans. Graph. 2013, 32, 1–12. [Google Scholar] [CrossRef]
- Mafarja, I.A. Evolutionary population dynamics and grasshopper optimization approach for feature selection problems. Knowl. Based Syst. 2018, 145, 25–45. [Google Scholar] [CrossRef]
- Ledig, C.; Theis, L.; Huszar, F. Photo-realistic single image super-resolution using generative adversarial network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Yu, L.; Li, X.; Fu, C.W. PU-net: Point cloud upsampling network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 19–21 June 2018. [Google Scholar]
- Zhang, Z.; Han, Y.; Chen, J.; Wang, S.; Wang, G.; Du, N. Information extraction of ecological canal system based on remote sensing data of unmanned aerial vehicle. J. Drain. Irrig. Mach. Eng. 2018, 36, 1006–1011. [Google Scholar]
- Wang, S.; Han, Y.; Chen, J.; Pan, Y.; Cao, Y.; Meng, H. Weed classification of remote sensing ecological irrigation area by UAV based on deep learning. J. Drain. Irrig. Mach. Eng. 2018, 11, 1137–1141. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Longitude Variance Error | Latitude Variance Error | |
|---|---|---|
| GOA-based integrated navigation | 0.00046 | 0.00034 |
| PSO-based integrated navigation | 0.00087 | 0.00079 |
| Raw integrated navigation | 0.0091 | 0.0047 |
| Mean Value | Variance | Standard Deviation | |
|---|---|---|---|
| Raw crop point cloud | 558.64 | 171.60 | 13.10 |
| 1st set of the enhanced crop point cloud | 568.84 | 298.48 | 17.27 |
| 2nd set of the enhanced crop point cloud | 578.68 | 289.34 | 17.01 |
| 3rd set of the enhanced crop point cloud | 554.32 | 278.56 | 16.69 |
| 4th set of the enhanced crop point cloud | 565.44 | 325.08 | 18.03 |
| 5th set of the enhanced crop point cloud | 563.56 | 317.51 | 17.82 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Zhang, Z.; Zhang, K.; Wang, S.; Han, Y. UAV-Borne LiDAR Crop Point Cloud Enhancement Using Grasshopper Optimization and Point Cloud Up-Sampling Network. Remote Sens. 2020, 12, 3208. https://doi.org/10.3390/rs12193208
Chen J, Zhang Z, Zhang K, Wang S, Han Y. UAV-Borne LiDAR Crop Point Cloud Enhancement Using Grasshopper Optimization and Point Cloud Up-Sampling Network. Remote Sensing. 2020; 12(19):3208. https://doi.org/10.3390/rs12193208
Chicago/Turabian StyleChen, Jian, Zichao Zhang, Kai Zhang, Shubo Wang, and Yu Han. 2020. "UAV-Borne LiDAR Crop Point Cloud Enhancement Using Grasshopper Optimization and Point Cloud Up-Sampling Network" Remote Sensing 12, no. 19: 3208. https://doi.org/10.3390/rs12193208
APA StyleChen, J., Zhang, Z., Zhang, K., Wang, S., & Han, Y. (2020). UAV-Borne LiDAR Crop Point Cloud Enhancement Using Grasshopper Optimization and Point Cloud Up-Sampling Network. Remote Sensing, 12(19), 3208. https://doi.org/10.3390/rs12193208