Investigating the Impact of Digital Elevation Models on Sentinel-1 Backscatter and Coherence Observations

 , ,
, ,
Abstract
1. Introduction
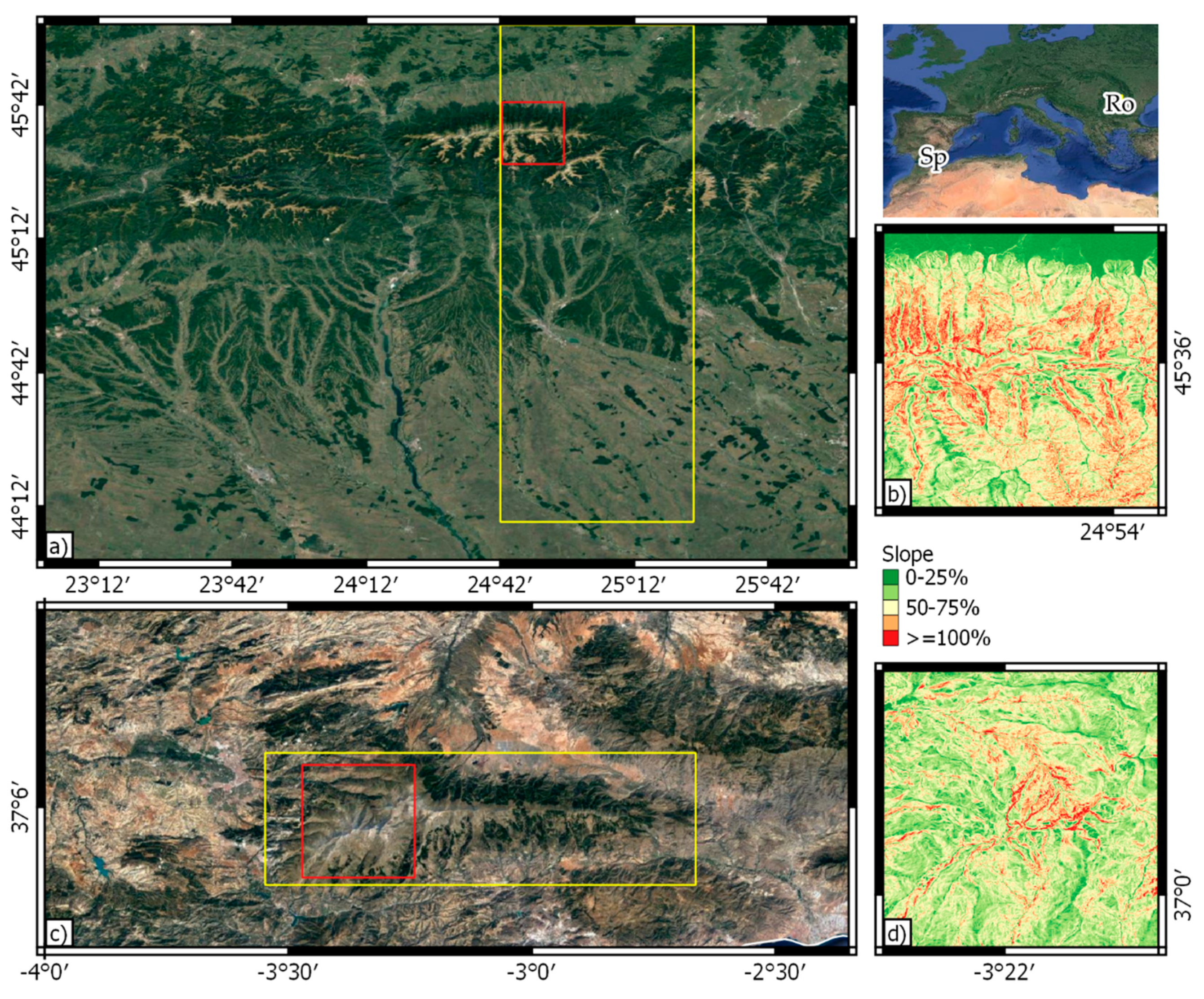
2. Study Area and Satellite Data
3. Methods
3.1. DEM Assembly
3.2. SAR Data Preparation
3.3. Auxiliary Datasets
3.4. Inter-Orbital Data Analysis
3.5. Land Cover Classification
4. Results
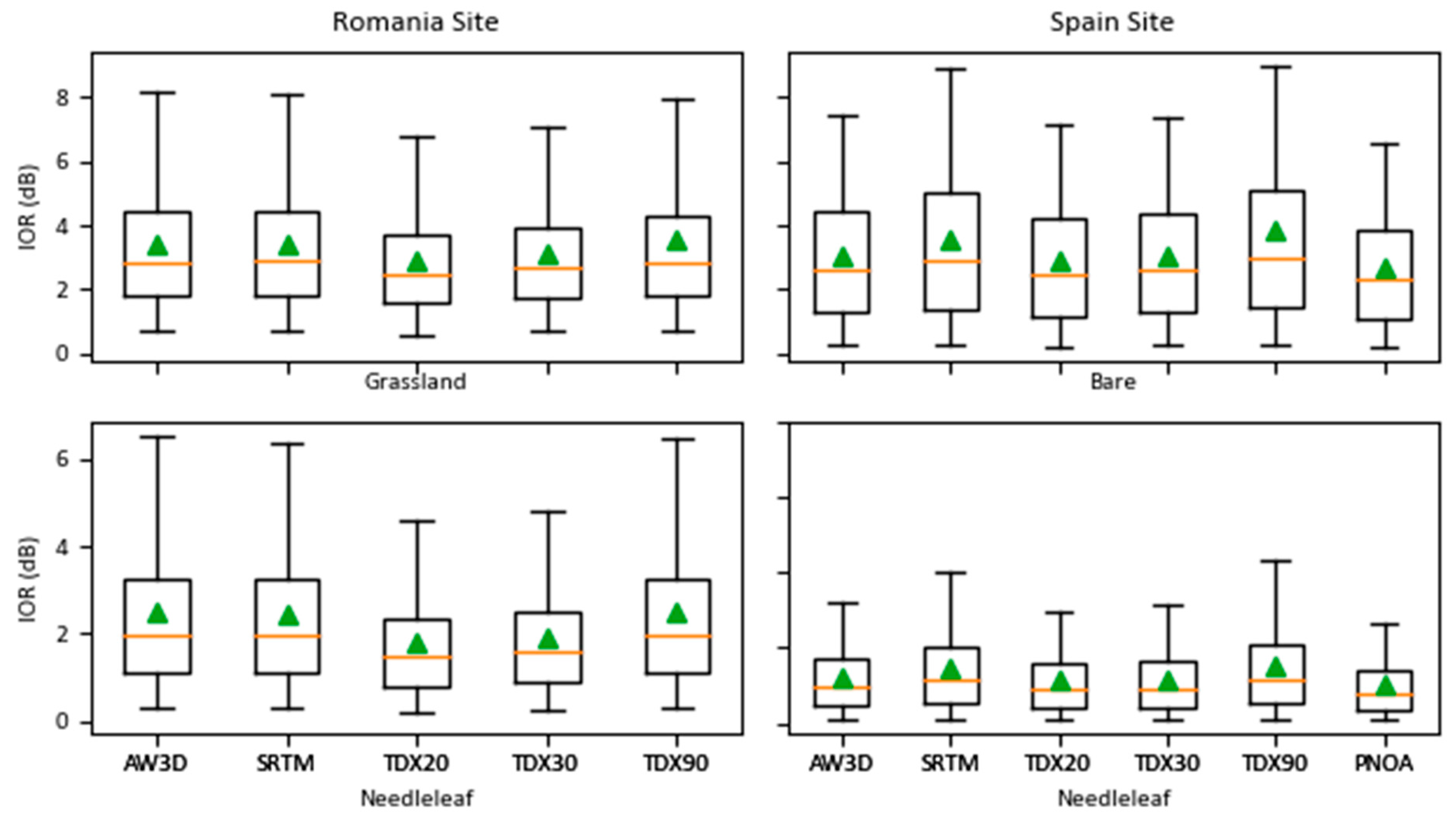
4.1. Inter-Orbital Range by Land Cover
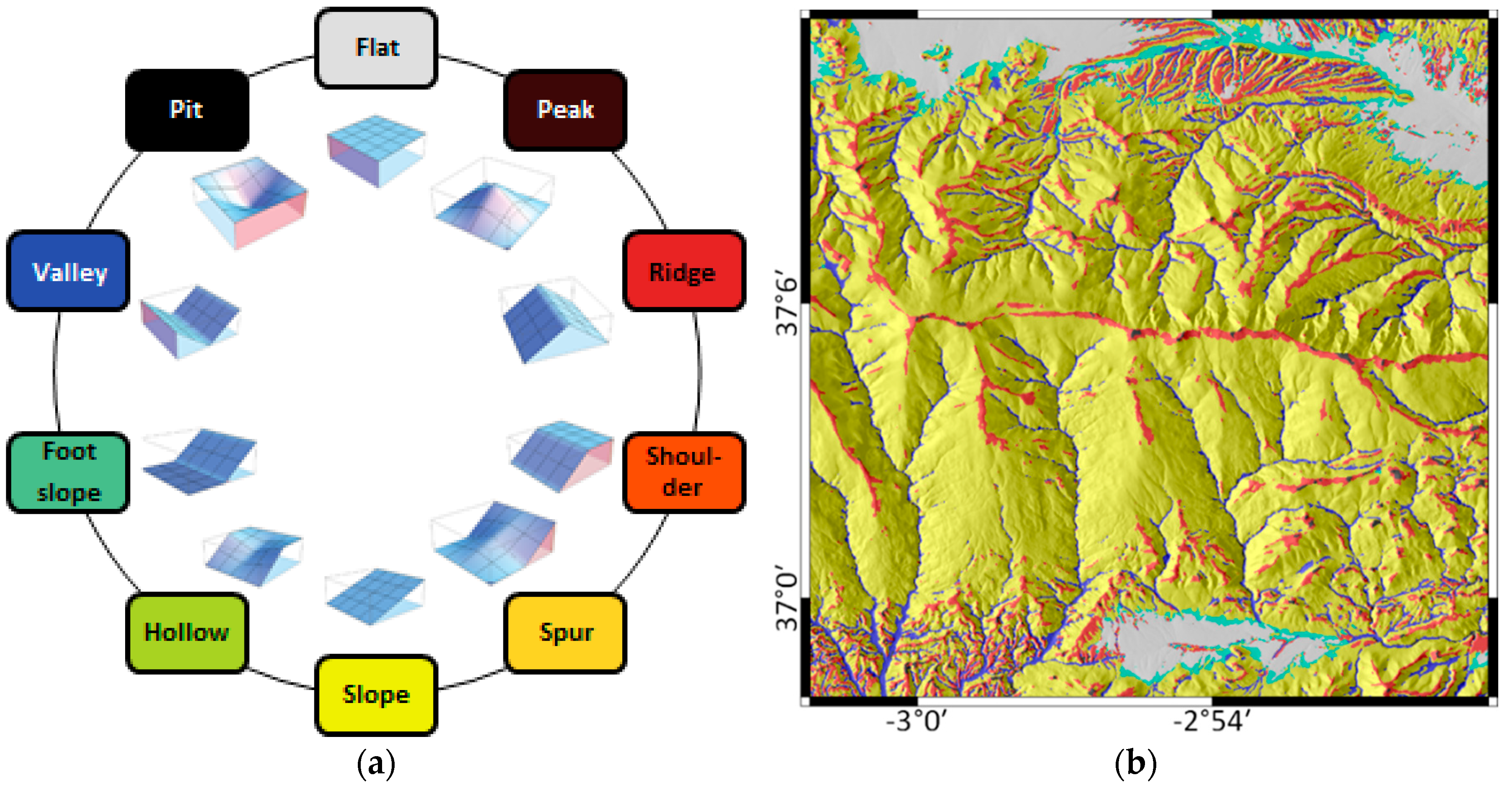
4.2. Inter-Orbital Ranges by Landform
4.3. Differences with and ALS-Derived DEM
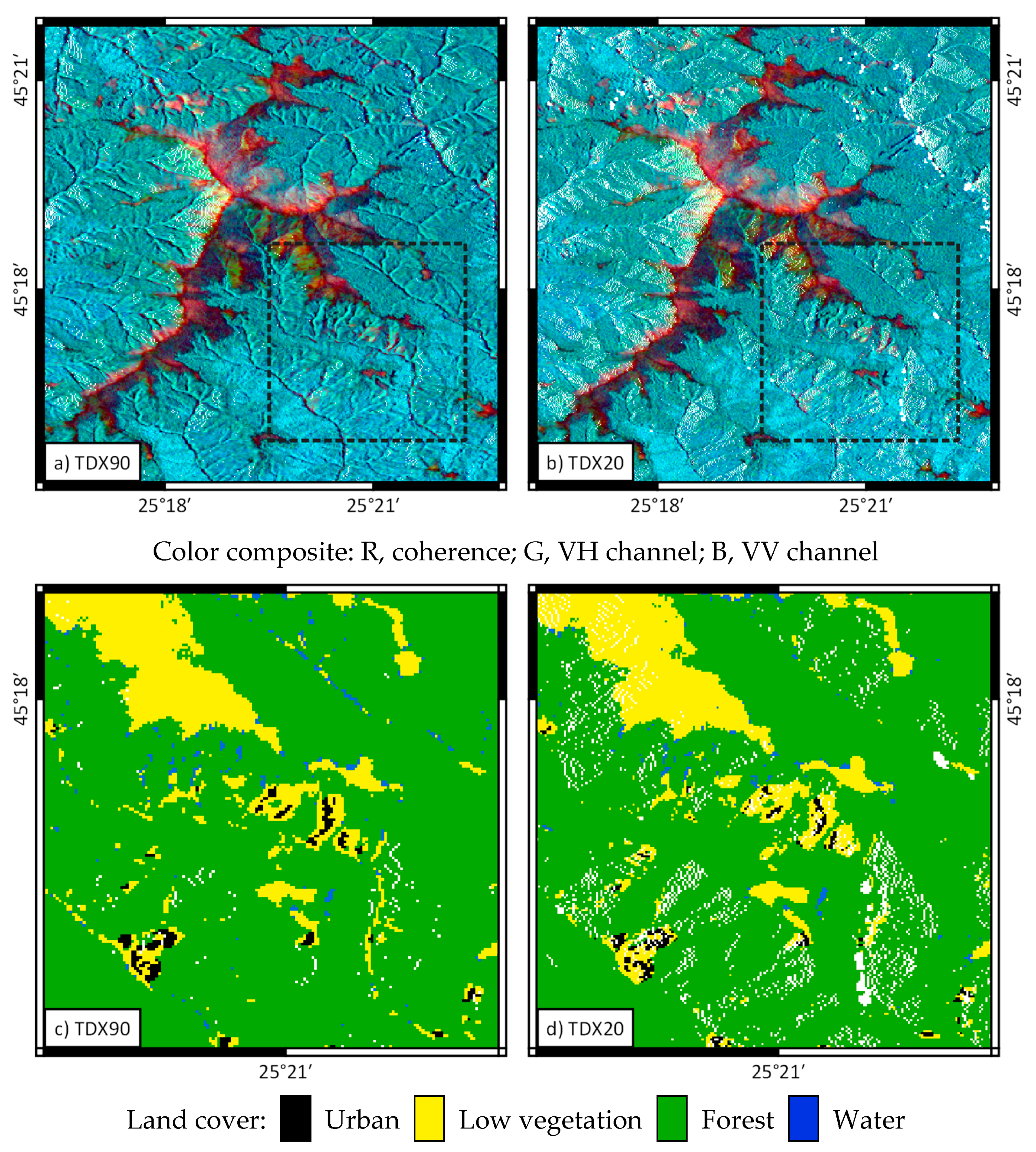
4.4. Land Cover Classification
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| O007 | O029 | O131 | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ur | LV | Fo | Wa | UA | Ur | LV | Fo | Wa | UA | Ur | LV | Fo | Wa | UA | ||||
| AW3D | Ur | 19147 | 6602 | 7310 | 43 | 57.84 | 18698 | 6465 | 19317 | 24 | 42.01 | 18749 | 5044 | 12423 | 44 | 51.71 | ||
| LV | 2206 | 1548500 | 19344 | 271 | 98.61 | 2063 | 1544334 | 20493 | 321 | 98.54 | 2366 | 1545097 | 24852 | 358 | 98.25 | |||
| Fo | 250 | 10075 | 811265 | 380 | 98.70 | 759 | 13244 | 787900 | 395 | 98.21 | 357 | 9861 | 739556 | 389 | 98.59 | |||
| Wa | 0 | 506 | 506 | 5054 | 83.32 | 0 | 611 | 355 | 5007 | 83.83 | 0 | 688 | 468 | 4956 | 81.09 | |||
| PA | 88.63 | 98.90 | 96.76 | 87.93 | 86.89 | 98.70 | 95.15 | 87.12 | 87.32 | 99.00 | 95.14 | 86.24 | ||||||
| SRTM | Ur | 18868 | 6245 | 7204 | 40 | 58.31 | 18439 | 6055 | 19377 | 24 | 42.01 | 18725 | 5048 | 12952 | 48 | 50.92 | ||
| LV | 2278 | 1540604 | 19090 | 262 | 98.62 | 2108 | 1537069 | 20272 | 318 | 98.54 | 2283 | 1538477 | 23950 | 340 | 98.30 | |||
| Fo | 265 | 9900 | 806632 | 379 | 98.71 | 774 | 12931 | 782981 | 386 | 98.23 | 285 | 9564 | 735257 | 371 | 98.63 | |||
| Wa | 0 | 546 | 549 | 4944 | 81.87 | 0 | 566 | 283 | 4895 | 85.22 | 0 | 618 | 358 | 4861 | 83.28 | |||
| PA | 88.12 | 98.93 | 96.78 | 87.89 | 86.48 | 98.74 | 95.15 | 87.05 | 87.94 | 99.02 | 95.18 | 86.49 | ||||||
| TDX20 | Ur | 29990 | 9446 | 11850 | 73 | 58.39 | 28857 | 8597 | 30849 | 36 | 42.23 | 29327 | 7184 | 18985 | 73 | 52.78 | ||
| LV | 3168 | 2411865 | 22525 | 363 | 98.93 | 3440 | 2410056 | 31421 | 475 | 98.55 | 3426 | 2407209 | 39924 | 475 | 98.21 | |||
| Fo | 364 | 16915 | 1270072 | 619 | 98.61 | 1088 | 17561 | 1188573 | 552 | 98.41 | 439 | 12460 | 1060469 | 540 | 98.75 | |||
| Wa | 1 | 1112 | 419 | 7772 | 83.53 | 0 | 960 | 251 | 7535 | 86.15 | 0 | 1063 | 311 | 7085 | 83.76 | |||
| PA | 89.46 | 98.87 | 97.33 | 88.05 | 86.44 | 98.89 | 95.00 | 87.64 | 88.36 | 99.15 | 94.71 | 86.69 | ||||||
| TDX30 | Ur | 19156 | 6430 | 8530 | 42 | 56.08 | 18677 | 6280 | 21653 | 24 | 40.05 | 18793 | 4847 | 13386 | 46 | 50.69 | ||
| LV | 2034 | 1540695 | 16591 | 239 | 98.79 | 2010 | 1538410 | 20705 | 301 | 98.53 | 2205 | 1539752 | 27089 | 303 | 98.11 | |||
| Fo | 221 | 9505 | 808033 | 390 | 98.76 | 642 | 11234 | 773058 | 350 | 98.44 | 276 | 8255 | 712706 | 356 | 98.77 | |||
| Wa | 0 | 665 | 321 | 4954 | 83.40 | 0 | 718 | 220 | 4867 | 83.84 | 0 | 680 | 171 | 4678 | 84.61 | |||
| PA | 89.47 | 98.93 | 96.95 | 88.07 | 87.57 | 98.83 | 94.78 | 87.82 | 88.34 | 99.11 | 94.60 | 86.90 | ||||||
| TDX90 | Ur | 19027 | 6599 | 7449 | 46 | 57.45 | 18439 | 5990 | 18774 | 26 | 42.65 | 18727 | 5161 | 13647 | 53 | 49.82 | ||
| LV | 2179 | 1542343 | 18571 | 245 | 98.66 | 2138 | 1538972 | 19112 | 309 | 98.62 | 2294 | 1540926 | 23537 | 344 | 98.33 | |||
| Fo | 240 | 9780 | 808189 | 396 | 98.73 | 794 | 13421 | 789226 | 382 | 98.18 | 309 | 9608 | 743312 | 370 | 98.63 | |||
| Wa | 9 | 666 | 921 | 4937 | 75.57 | 0 | 567 | 343 | 4905 | 84.35 | 0 | 641 | 357 | 4854 | 82.95 | |||
| PA | 88.68 | 98.91 | 96.77 | 87.78 | 86.28 | 98.72 | 95.38 | 87.25 | 87.80 | 99.01 | 95.19 | 86.35 | ||||||
| O007 | O029 | O131 | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ur | LV | Fo | Wa | UA | Ur | LV | Fo | Wa | UA | Ur | LV | Fo | Wa | UA | ||||
| AW3D | Ur | 304 | 188 | 827 | 2 | 23.01 | 305 | 225 | 2478 | 1 | 10.14 | 298 | 175 | 1292 | 2 | 16.86 | ||
| LV | 25 | 5447 | 4117 | 26 | 56.65 | 20 | 5232 | 4292 | 30 | 54.65 | 27 | 5214 | 3984 | 33 | 56.32 | |||
| Fo | 2 | 537 | 76000 | 19 | 99.27 | 1 | 697 | 73596 | 18 | 99.04 | 3 | 606 | 70952 | 20 | 99.12 | |||
| Wa | 0 | 32 | 176 | 514 | 71.19 | 0 | 27 | 81 | 512 | 82.58 | 0 | 27 | 54 | 506 | 86.20 | |||
| PA | 91.84 | 87.80 | 93.69 | 91.62 | 93.56 | 84.65 | 91.48 | 91.27 | 90.85 | 86.58 | 93.01 | 90.20 | ||||||
| SRTM | Ur | 319 | 239 | 816 | 1 | 23.20 | 318 | 193 | 1974 | 2 | 12.79 | 318 | 177 | 949 | 1 | 22.01 | ||
| LV | 29 | 5195 | 3821 | 18 | 57.32 | 30 | 5137 | 4540 | 28 | 52.77 | 29 | 5102 | 4404 | 28 | 53.35 | |||
| Fo | 3 | 598 | 72313 | 17 | 99.15 | 0 | 689 | 70070 | 14 | 99.01 | 1 | 583 | 68204 | 15 | 99.13 | |||
| Wa | 0 | 29 | 128 | 429 | 73.21 | 0 | 27 | 84 | 421 | 79.14 | 0 | 29 | 58 | 420 | 82.84 | |||
| PA | 90.88 | 85.71 | 93.82 | 92.26 | 91.38 | 84.97 | 91.39 | 90.54 | 91.38 | 86.61 | 92.65 | 90.52 | ||||||
| TDX20 | Ur | 495 | 410 | 1795 | 1 | 18.33 | 492 | 371 | 4221 | 2 | 9.67 | 485 | 277 | 1923 | 1 | 18.06 | ||
| LV | 35 | 8150 | 3874 | 29 | 67.42 | 35 | 8080 | 5511 | 47 | 59.09 | 33 | 7983 | 5496 | 44 | 58.89 | |||
| Fo | 3 | 994 | 113029 | 34 | 99.10 | 1 | 1022 | 104714 | 21 | 99.01 | 4 | 844 | 95033 | 26 | 99.09 | |||
| Wa | 0 | 38 | 108 | 724 | 83.22 | 0 | 31 | 36 | 673 | 90.95 | 0 | 27 | 48 | 596 | 88.82 | |||
| PA | 92.87 | 84.97 | 95.14 | 91.88 | 93.18 | 85.02 | 91.47 | 90.58 | 92.91 | 87.43 | 92.72 | 89.36 | ||||||
| TDX30 | Ur | 329 | 274 | 1267 | 1 | 17.58 | 323 | 258 | 2910 | 1 | 9.25 | 324 | 205 | 1377 | 1 | 16.99 | ||
| LV | 19 | 5160 | 2846 | 15 | 64.18 | 25 | 5091 | 3604 | 24 | 58.22 | 19 | 5068 | 3732 | 23 | 57.32 | |||
| Fo | 3 | 594 | 72894 | 21 | 99.16 | 0 | 651 | 68921 | 12 | 99.05 | 1 | 553 | 64973 | 18 | 99.13 | |||
| Wa | 0 | 33 | 71 | 428 | 80.45 | 0 | 29 | 51 | 411 | 83.71 | 0 | 29 | 33 | 378 | 85.91 | |||
| PA | 93.73 | 85.13 | 94.57 | 92.04 | 92.82 | 84.44 | 91.30 | 91.74 | 94.19 | 86.56 | 92.67 | 90.00 | ||||||
| TDX90 | Ur | 305 | 258 | 1046 | 0 | 18.96 | 304 | 243 | 2341 | 0 | 10.53 | 309 | 187 | 1256 | 0 | 17.64 | ||
| LV | 24 | 5299 | 3304 | 21 | 61.27 | 22 | 5183 | 3809 | 39 | 57.25 | 21 | 5216 | 3669 | 39 | 58.31 | |||
| Fo | 3 | 606 | 70640 | 19 | 99.12 | 2 | 725 | 68702 | 14 | 98.93 | 2 | 610 | 67360 | 12 | 99.08 | |||
| Wa | 0 | 26 | 259 | 451 | 61.28 | 0 | 28 | 116 | 437 | 75.22 | 0 | 25 | 106 | 439 | 77.02 | |||
| PA | 91.87 | 85.62 | 93.88 | 91.85 | 92.68 | 83.88 | 91.64 | 89.18 | 93.07 | 86.39 | 93.05 | 89.59 | ||||||
References
- Ouchi, K. Recent trend and advance of synthetic aperture radar with selected topics. Remote Sens. 2013, 5, 716–807. [Google Scholar] [CrossRef]
- Small, D. Flattening gamma: Radiometric terrain correction for SAR imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3081–3093. [Google Scholar] [CrossRef]
- Frey, O.; Santoro, M.; Werner, C.L.; Wegmuller, U. DEM-based SAR pixel-area estimation for enhanced geocoding refinement and radiometric normalization. IEEE Geosci. Remote Sens. Lett. 2013, 10, 48–52. [Google Scholar] [CrossRef]
- Askne, J.I.H.; Dammert, P.B.G.; Ulander, L.M.H.; Smith, G. C-band repeat-pass interferometric SAR observations of the forest. IEEE Trans. Geosci. Remote Sens. 1997, 35, 25–35. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. Lidar remote sensing for ecosystem studies. BioScience 2002, 52, 192002. [Google Scholar] [CrossRef]
- CNIG. Centro Nacional de Información Geográfica National Plan for Aerial Orthophotography. Available online: http://pnoa.ign.es/ (accessed on 21 May 2019).
- ODP Aerial LiDAR Scanning Datasets. Available online: http://data.opendataportal.at/dataset?tags=ALS&sort=score+desc (accessed on 29 December 2019).
- Shuman, C.A.; Zwally, H.J.; Schutz, B.E.; Brenner, A.C.; DiMarzio, J.P.; Suchdeo, V.P.; Fricker, H.A. ICESat Antarctic elevation data: Preliminary precision and accuracy assessment. Geophys. Res. Lett. 2006, 33, L07501. [Google Scholar] [CrossRef]
- Tadono, T.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. Precise global DEM generation by ALOS PRISM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 71–76. [Google Scholar] [CrossRef]
- Felicísimo, A.M. Modelos Digitales del Terreno: Introducción y Aplicaciones en las Ciencias Ambientales; Pentalfa Ediciones: Oviedo, Spain, 1994; ISBN 978-84-7848-475-1. [Google Scholar]
- Aber, J.S.; Marzolff, I.; Ries, J.B.; Aber, S.E.W. Principles of photogrammetry. In Small-Format Aerial Photography and UAS Imagery; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Purinton, B.; Bookhagen, B. Validation of digital elevation models (DEMs) and comparison of geomorphic metrics on the southern Central Andean Plateau. Earth Surf. Dynam. 2017, 5, 211–237. [Google Scholar] [CrossRef]
- Tachikawa, T.; Hato, M.; Kaku, M.; Iwasaki, A. Characteristics of ASTER GDEM version 2. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 3657–3660. [Google Scholar]
- Woodhouse, I.H. Introduction to Microwave Remote Sensing; Taylor&Francis: Boca Raton, FL, USA, 2006; ISBN 978-0-415-27123-3. [Google Scholar]
- Hirt, C.; Filmer, M.S.; Featherstone, W.E. Comparison and validation of the recent freely available ASTER-GDEM ver1, SRTM ver4.1 and GEODATA DEM-9S ver3 digital elevation models over Australia. Aust. J. Earth Sci. 2010, 57, 337–347. [Google Scholar] [CrossRef]
- Florinsky, I.V.; Skrypitsyna, T.N.; Luschikova, O.S. Comparative accuracy of the AW3D30 DSM, ASTER GDEM, and SRTM1 DEM: A case study on the Zaoksky testing ground, Central European Russia. Remote Sens. Lett. 2018, 9, 706–714. [Google Scholar] [CrossRef]
- Grohmann, C.H. Evaluation of TanDEM-X DEMs on selected Brazilian sites: Comparison with SRTM, ASTER GDEM and ALOS AW3D30. Remote Sens. Environ. 2018, 212, 121–133. [Google Scholar] [CrossRef]
- Santillan, J.R.; Makinano-Santillan, M. Vertical accuracy assessment of 30-m resolution ALOS, ASTER, AND SRTM global DEMs over northeastern Mindanao, Philippines. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 149–156. [Google Scholar] [CrossRef]
- Courty, L.G.; Soriano-Monzalvo, J.C.; Pedrozo-Acuña, A. Evaluation of open-access global digital elevation models (AW3D30, SRTM, and ASTER) for flood modelling purposes. J. Flood Risk Manag. 2019, 12, e12550. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Smith, B. Accuracy and resolution of shuttle radar topography mission data. Geophys. Res. Lett. 2003, 30, 1467. [Google Scholar] [CrossRef]
- Guth, P.L. Geomorphometry from SRTM. Photogramm. Eng Remote Sens. 2006, 72, 269–277. [Google Scholar] [CrossRef]
- Wessel, B. TanDEM-X Ground Segment–DEM Products Specification Document; DLR: Oberpfaffenhofen, Germany, 2016. [Google Scholar]
- Rizzoli, P.; Martone, M.; Gonzalez, C.; Wecklich, C.; Borla Tridon, D.; Bräutigam, B.; Bachmann, M.; Schulze, D.; Fritz, T.; Huber, M.; et al. Generation and performance assessment of the global TanDEM-X digital elevation model. ISPRS J. Photogramm. Remote Sens. 2017, 132, 119–139. [Google Scholar] [CrossRef]
- Wallington, E.D.; Woodhouse, I.H. Forest height retrieval from commercial X-band SAR products. IEEE Trans. Geosci. Remote Sens. 2006, 44, 863–870. [Google Scholar] [CrossRef]
- Santoro, M.; Askne, J.; Dammert, P.B.G. Tree height influence on ERS interferometric phase in boreal forest. IEEE Trans. Geosci. Remote Sens. 2005, 43, 207–217. [Google Scholar] [CrossRef]
- Thirion-Lefevre, L.; Colin-Koeniguer, E. Investigating attenuation, scattering phase center, and total height using simulated interferometric SAR images of forested areas. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3172–3179. [Google Scholar] [CrossRef]
- Hoekman, D.H.; Reiche, J. Multi-model radiometric slope correction of SAR images of complex terrain using a two-stage semi-empirical approach. Remote Sens. Environ. 2015, 156, 1–10. [Google Scholar] [CrossRef]
- Truckenbrodt, J.; Freemantle, T.; Williams, C.; Jones, T.; Small, D.; Dubois, C.; Thiel, C.; Rossi, C.; Syriou, A.; Giuliani, G. Towards sentinel-1 SAR analysis-ready data: A best practices assessment on preparing backscatter data for the cube. Data 2019, 4, 932019. [Google Scholar] [CrossRef]
- DLR. TanDEM-X DEM Proposal Submission Procedure. Available online: https://tandemx-science.dlr.de/cgi-bin/wcm.pl?page=TDM-Proposal-Submission-Procedure (accessed on 8 September 2020).
- EROS. Shuttle Radar Topography Mission (SRTM) 1 Arc-Second Global; EROS: Sioux Falls, SD, USA, 2017. [Google Scholar]
- USGS EarthExplorer. Available online: https://earthexplorer.usgs.gov/ (accessed on 13 January 2020).
- JAXA ALOS Global Digital Surface Model “ALOS World 3D-30m” (AW3D30). Available online: https://www.eorc.jaxa.jp/ALOS/en/aw3d30/index.htm (accessed on 13 January 2020).
- DLR EOWEB GeoPortal. Available online: https://eoweb.dlr.de/egp/ (accessed on 13 January 2020).
- CNIG. Centro Nacional de Información Geográfica Centro de Descargas del CNIG (IGN). Available online: http://centrodedescargas.cnig.es (accessed on 13 January 2020).
- CNIG. Centro Nacional de Información Geográfica Primera Cobertura del Plan Nacional de Fotografía Aérea. Available online: https://pnoa.ign.es/estado-del-proyecto-lidar/primera-cobertura (accessed on 21 August 2020).
- Soininen, A. TerraScan User’s Guide; Terrasolid: Helsinki, Finland, 2004. [Google Scholar]
- Lorite Martínez, S.; Moreno Jabato, J.; de Tejada, J.M.G.S.; Rodríguez-Cuenca, B. Automatic classification of bridges and continental water bodies from 3D point clouds (aerial lidar). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 1047–1051. [Google Scholar] [CrossRef]
- Lorite Martínez, S.; Ojeda Manrique, J.C.; Rodríguez-Cuenca, B.; González Cristóbal, E.; Muñoz, P. Procesado y distribución de nubes de puntos en el proyecto PNOA-LiDAR. In Proceedings of the XVII Congreso de la Asociación Española de Teledetección, Murcia, Spain, 3–7 October 2017; pp. 329–332. [Google Scholar]
- Rodríguez, E.; Morris, C.S.; Belz, J.E. A Global Assessment of the SRTM Performance. Photogramm. Eng. Remote Sens. 2006, 72, 249–260. [Google Scholar] [CrossRef]
- Takaku, J.; Tadono, T.; Tsutsui, K.; Ichikawa, M. Validation of “AW3D” global DSM generated from Alos Prism. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 25–31. [Google Scholar] [CrossRef]
- IGN. Plan Nacional de Ortofotografía Aérea. Especificaciones Técnicas. Available online: http://pnoa.ign.es/caracteristicas-tecnicas (accessed on 21 May 2019).
- GDAL/OGR Contributors. GDAL/OGR Geospatial Data Abstraction Software Library; Open Source Geospatial Foundation: Beaverton, OR, USA, 2020. [Google Scholar]
- Wegnüller, U.; Werner, C.; Strozzi, T.; Wiesmann, A.; Frey, O.; Santoro, M. Sentinel-1 support in the GAMMA software. Proc. Comput. Sci. 2016, 100, 1305–1312. [Google Scholar] [CrossRef]
- GRASS Development Team. Geographic Resources Analysis Support System (GRASS GIS) Software; Open Source Geospatial Foundation: Beaverton, OR, USA, 2017. [Google Scholar]
- Python Software Foundation. Python Language Reference, Version 3; Python Software Foundation: Fredericksburg, VA, USA, 2020. [Google Scholar]
- Gillies, S.; Ward, B.; Petersen, A.S. Rasterio: Geospatial raster I/O for Python Programmers; Mapbox: Washington, DC, USA, 2013. [Google Scholar]
- Pandas Contributors. Pandas; Zenodo: Geneva, Switzerland, 2020. [Google Scholar]
- GeoPandas Contributors. GeoPandas: Python Tools for Geographic Data; Zenodo: Geneva, Switzerland, 2020. [Google Scholar]
- Van der Walt, S.; Colbert, S.C.; Varoquaux, G. The NumPy array: A structure for efficient numerical computation. Comput. Sci. Eng. 2011, 13, 22–30. [Google Scholar] [CrossRef]
- Jones, E.; Oliphant, T.; Peterson, P. SciPy: Open Source Scientific Tools for Python; Python Software Foundation: Fredericksburg, VA, USA, 2014. [Google Scholar]
- Hunter, J.D. Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Wegmüller, U.; Werner, C.; Strozzi, T.; Wiesmann, A. Automated and precise image registration procedures. In Analysis of Multi-Temporal Remote Sensing Images; Series in Remote Sensing; World Scientific: Singapore, 2002; Volume 2, pp. 37–49. ISBN 978-981-02-4955-7. [Google Scholar]
- Wegmüller, U.; Werner, C. Land applications using ERS-1/2 tandem data. In Proceedings of the Fringe Workshop, ERS SAR Interferometry, European Space Agency, Zurich, Switzerland, 30 September–2 October 1996; pp. 97–112. [Google Scholar]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. Gamma SAR and interferometric processing software. In Proceedings of the ERS-Envisat Symposium, Gothenburg, Switzerland, 16–20 October 2000. [Google Scholar]
- Touzi, R.; Lopes, A.; Bruniquel, J.; Vachon, P.W. Coherence estimation for SAR imagery. IEEE Trans. Geosci. Remote Sens. 1999, 37, 135–149. [Google Scholar] [CrossRef]
- Castel, T.; Beaudoin, A.; Stach, N.; Stussi, N.; Le Toan, T.; Durand, P. Sensitivity of space-borne SAR data to forest parameters over sloping terrain. Theory and experiment. Int. J. Remote Sens. 2001, 22, 2351–2376. [Google Scholar] [CrossRef]
- Kirches, G.; Brockmann, C.; Boettcher, M.; Peters, M.; Bontemps, S.; Lamarche, C.; Schlerf, M.; Santoro, M.; Defourny, P. Land Cover CCI-Product User Guide-Version 2; ESA: Libin, Belgium, 2017. [Google Scholar]
- Esch, T.; Schenk, A.; Ullmann, T.; Thiel, M.; Roth, A.; Dech, S. Characterization of land cover types in TerraSAR-X images by combined analysis of speckle statistics and intensity information. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1911–1925. [Google Scholar] [CrossRef]
- Esch, T.; Heldens, W.; Hirner, A.; Keil, M.; Marconcini, M.; Roth, A.; Zeidler, J.; Dech, S.; Strano, E. Breaking new ground in mapping human settlements from space—The Global Urban Footprint. ISPRS J. Photogramm. Remote Sens. 2017, 134, 30–42. [Google Scholar] [CrossRef]
- Esch, T.; Bachofer, F.; Heldens, W.; Hirner, A.; Marconcini, M.; Palacios-Lopez, D.; Roth, A.; Üreyen, S.; Zeidler, J.; Dech, S.; et al. Where we live—A summary of the achievements and planned evolution of the global urban footprint. Remote Sens. 2018, 10, 895. [Google Scholar] [CrossRef]
- Shimada, M.; Itoh, T.; Motooka, T.; Watanabe, M.; Shiraishi, T.; Thapa, R.; Lucas, R. New global forest/non-forest maps from ALOS PALSAR data (2007–2010). Remote Sens. Environ. 2014, 155, 13–31. [Google Scholar] [CrossRef]
- CRC. European Landscape Dynamics: CORINE Land Cover Data; Feranec, J., Soukup, T., Feranec, G., Jaffrain, G., Eds.; CRC Press: Boca Raton, FL, USA, 2016; ISBN 978-1-4822-4466-3. [Google Scholar]
- Del Bosque González, I.; Arozarena Villar, A.; Villa Alcázar, G.; Valcárcel Sanz, N.; Porcuna Fernández Monasterio, A. Creación de un sistema de información geográfico de ocupación del suelo en España. proyecto siose. In Proceedings of the Teledetección: Avances en la Observación de la Tierra, Florence, Italy, 21–23 September 2005. [Google Scholar]
- SIOSE. Sistema de Ocupación del Suelo de España Especificaciones Técnicas SIOSE. Available online: https://www.siose.es/especificaciones-tecnicas (accessed on 27 August 2020).
- Li, W.; MacBean, N.; Ciais, P.; Defourny, P.; Lamarche, C.; Bontemps, S.; Houghton, R.A.; Peng, S. Gross and net land cover changes in the main plant functional types derived from the annual ESA CCI land cover maps (1992–2015). Earth Syst. Sci. Data 2018, 10, 219–234. [Google Scholar] [CrossRef]
- MacMillan, R.A.; Shary, P.A. Landforms and landform elements in geomorphometry. In Developments in Soil Science; Elsevier: Amsterdam, The Netherlands, 2009; Volume 33, pp. 227–254. ISBN 978-0-12-374345-9. [Google Scholar]
- Jasiewicz, J.; Stepinski, T.F. Geomorphons—A pattern recognition approach to classification and mapping of landforms. Geomorphology 2013, 182, 147–156. [Google Scholar] [CrossRef]
- Buitinck, L.; Louppe, G.; Blondel, M.; Pedregosa, F.; Mueller, A.; Grisel, O.; Niculae, V.; Prettenhofer, P.; Gramfort, A.; Grobler, J.; et al. API design for machine learning software: Experiences from the scikit-learn project. arXiv 2013, arXiv:1309.0238. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Measur. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- NASA. USGS Release of NASADEM Data Products. Available online: https://lpdaac.usgs.gov/news/release-nasadem-data-products/ (accessed on 11 September 2020).






| DEM Product | Pixel Spacing | Accuracy | Relative Vertical Accuracy | Coverage | Reference | |
|---|---|---|---|---|---|---|
| Horizontal | Vertical | |||||
| SRTM DEM | ~30 m | ≤12.6 m | ≤9 m | ≤9.8 m | Nearly global (60° N–56° S) | [40] |
| AW3D DSM | ~30 m | - | <7 m | >3 m (slope ≤ 20%) >5m (slope > 20%) | Global | [41] |
| TanDEM-X DEM | ~12.5 m | <10 m | <10 m | 2 m (slope ≤ 20%) 4 m (slope > 20%) | Global | [23] |
| PNOA LiDAR DEM | ~5 m | ≤0.5m | ≤0.5 m | - | Spain | [42] |
| CLC 2012 [63] | SIOSE 2014 [64] (CODIIGE) | CCI LC 2015 [66] | GUF 2016 [59,60,61] | ALOS FNF 2017 [62] | |
|---|---|---|---|---|---|
| Urban | 1xx: Artificial surfaces | 1xx: Artificial surfaces | 190: Urban areas | Urban | - |
| Crops | 21x: Arable land | 210: Crops (herbaceous) | 10, 20: Cropland, 11: Herbaceous cover | Other | Other |
| Pasture | 23x: Pastures | 320: Pastures | 11: Herbaceous 130: Grassland | Other | Other |
| Grassland | 321: Grassland | 320: Pastures | 11: Herbaceous 130: Grassland | Other | Other |
| Bare | 33x: Open spaces | 354: Bare | 200: Bare areas | Other | Other |
| Broadleaf forest | 311: Forest (broadleaf) | 311: Forest (broadleaf) | 50–62: Tree cover, broadleaved | Other | Forest |
| Needleleaf forest | 312: Forest (needleleaf) | 312: Forest (needleleaf) | 70–82: Tree cover, needle leaved | Other | Forest |
| Mixed forest | 313: Forest (mixed) | 313: Forest (mixed) | 90: Tree cover, mixed leaf type | Other | Forest |
| Water | 5xx: Water bodies | 5xx: Water bodies | 210: Water | Other | Other |
| Romania | Spain | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AW | SR | TDX | TDX | TDX | M. | AW | SR | TDX | TDX | TDX | ALS | M. | ||
| 3D | TM | 20 | 30 | 90 | D. | 3D | TM | 20 | 30 | 90 | D. | |||
| Urban | 5.4 | 5.4 | 5.3 | 5.4 | 6.9 | 1.6 | ||||||||
| Crops | 2.3 | 2.3 | 2.2 | 2.2 | 2.3 | 0.1 | 1.3 | 1.4 | 1.3 | 1.3 | 1.5 | 1.2 | 0.2 | |
| GL | 3.4 | 3.4 | 2.9 | 3.1 | 3.5 | 0.6 | ||||||||
| Bare | 3.1 | 3.5 | 2.9 | 3.1 | 3.9 | 2.7 | 1.0 | |||||||
| BLF | 2.0 | 2.0 | 1.7 | 1.8 | 2.0 | 0.3 | ||||||||
| NLF | 2.5 | 2.5 | 1.8 | 1.9 | 2.5 | 0.7 | 1.2 | 1.5 | 1.1 | 1.2 | 1.5 | 1.0 | 0.4 | |
| MLF | 2.4 | 2.4 | 1.9 | 2.0 | 2.4 | 0.5 | ||||||||
| Romania (Grasslands) | Spain (Bare) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AW | SR | TDX | TDX | TDX | M. | AW | SR | TDX | TDX | TDX | ALS | M. | ||
| 3D | TM | 20 | 30 | 90 | D. | 3D | TM | 20 | 30 | 90 | D. | |||
| peak | 3.1 | 3.0 | 2.5 | 2.6 | 3.5 | 1.0 | 2.9 | 3.3 | 2.6 | 2.7 | 6.1 | 2.2 | 3.5 | |
| ridge | 3.0 | 2.9 | 2.5 | 2.7 | 3.0 | 0.5 | 2.7 | 3.1 | 2.5 | 2.7 | 3.6 | 2.3 | 1.1 | |
| spur | 3.2 | 3.2 | 2.7 | 2.9 | 3.1 | 0.5 | 3.1 | 3.4 | 2.9 | 3.0 | 3.9 | 2.7 | 1.0 | |
| slope | 3.6 | 3.6 | 3.0 | 3.3 | 3.6 | 0.6 | 3.3 | 3.7 | 3.1 | 3.3 | 3.8 | 2.9 | 0.7 | |
| hollow | 4.2 | 4.3 | 3.6 | 3.9 | 4.6 | 1.0 | 3.2 | 3.8 | 3.1 | 3.2 | 3.9 | 2.8 | 0.8 | |
| valley | 4.5 | 4.7 | 4.1 | 4.4 | 5.5 | 1.4 | 3.0 | 3.4 | 2.9 | 3.1 | 4.7 | 2.6 | 1.8 | |
| Romania | Spain | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AW | SR | TDX | TDX | TDX | M. | AW | SR | TDX | TDX | TDX | ALS | M. | ||
| 3D | TM | 20 | 30 | 90 | D. | 3D | TM | 20 | 30 | 90 | D. | |||
| peak | 2.3 | 2.2 | 2.0 | 2.1 | 2.3 | 0.3 | ||||||||
| ridge | 2.2 | 2.2 | 1.9 | 2.0 | 2.2 | 0.4 | 1.2 | 1.3 | 1.1 | 1.1 | 1.3 | 1.0 | 0.2 | |
| spur | 2.2 | 2.2 | 1.7 | 1.8 | 2.2 | 0.5 | 1.2 | 1.3 | 1.1 | 1.1 | 1.4 | 1.0 | 0.3 | |
| slope | 2.3 | 2.3 | 1.7 | 1.8 | 2.4 | 0.7 | 1.2 | 1.5 | 1.1 | 1.2 | 1.5 | 1.0 | 0.4 | |
| hollow | 2.8 | 2.8 | 1.9 | 2.0 | 2.9 | 0.9 | 1.4 | 1.9 | 1.3 | 1.4 | 2.1 | 1.1 | 0.8 | |
| valley | 3.7 | 3.5 | 2.4 | 2.5 | 3.8 | 1.4 | 1.6 | 2.1 | 1.5 | 1.6 | 2.3 | 1.2 | 0.8 | |
| pit | 4.5 | 3.9 | 2.6 | 2.7 | 4.0 | 1.9 | ||||||||
| O001 | O081 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Statistic | AW | SR | TDX | TDX | TDX | AW | SR | TDX | TDX | TDX | ||
| 3D | TM | 20 | 30 | 90 | 3D | TM | 20 | 30 | 90 | |||
| Sc. area (m2) | Abs. RMSD | 97 | 188 | 102 | 109 | 213 | 115 | 214 | 113 | 123 | 245 | |
| Rel. RMSD | 11% | 21% | 11% | 12% | 24% | 12% | 22% | 11% | 12% | 25% | ||
| MAD | 38 | 81 | 32 | 36 | 87 | 47 | 96 | 38 | 43 | 104 | ||
| Offset | 18 | −4 | −11 | 14 | –21 | 25 | 0.4 | −12 | 20 | −18 | ||
| VV (dB) | Abs. RMSD | 0.54 | 0.96 | 0.63 | 0.54 | 2.89 | 0.56 | 0.96 | 0.64 | 0.55 | 3.35 | |
| Rel. RMSD | 5% | 10% | 6% | 5% | 29% | 6% | 10% | 7% | 6% | 34% | ||
| MAD | 0.38 | 0.64 | 0.41 | 0.36 | 0.74 | 0.38 | 0.63 | 0.41 | 0.35 | 0.75 | ||
| Offset | −0.19 | −0.27 | −0.27 | −0.17 | −0.35 | −0.24 | −0.30 | −0.35 | −0.23 | −0.41 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borlaf-Mena, I.; Santoro, M.; Villard, L.; Badea, O.; Tanase, M.A. Investigating the Impact of Digital Elevation Models on Sentinel-1 Backscatter and Coherence Observations. Remote Sens. 2020, 12, 3016. https://doi.org/10.3390/rs12183016
Borlaf-Mena I, Santoro M, Villard L, Badea O, Tanase MA. Investigating the Impact of Digital Elevation Models on Sentinel-1 Backscatter and Coherence Observations. Remote Sensing. 2020; 12(18):3016. https://doi.org/10.3390/rs12183016
Chicago/Turabian StyleBorlaf-Mena, Ignacio, Maurizio Santoro, Ludovic Villard, Ovidiu Badea, and Mihai Andrei Tanase. 2020. "Investigating the Impact of Digital Elevation Models on Sentinel-1 Backscatter and Coherence Observations" Remote Sensing 12, no. 18: 3016. https://doi.org/10.3390/rs12183016
APA StyleBorlaf-Mena, I., Santoro, M., Villard, L., Badea, O., & Tanase, M. A. (2020). Investigating the Impact of Digital Elevation Models on Sentinel-1 Backscatter and Coherence Observations. Remote Sensing, 12(18), 3016. https://doi.org/10.3390/rs12183016