Implementation of a Nowcasting Hydrometeorological System for Studying Flash Flood Events: The Case of Mandra, Greece
 ,
,  ,
,  ,
,  , , and
, , and 
Abstract
1. Introduction
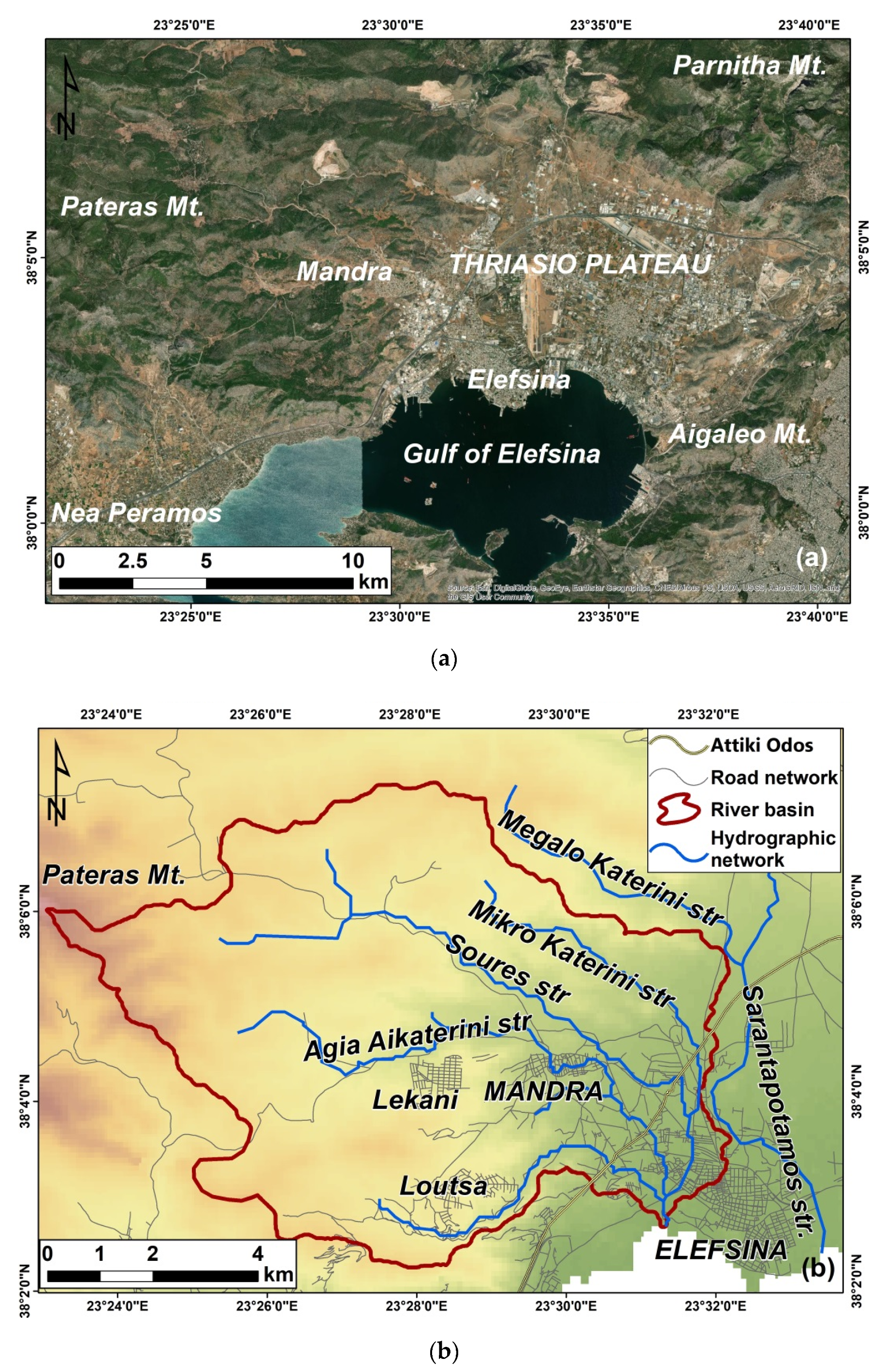
2. Study Area and Description of the Flood Event
3. Materials Used and System Development
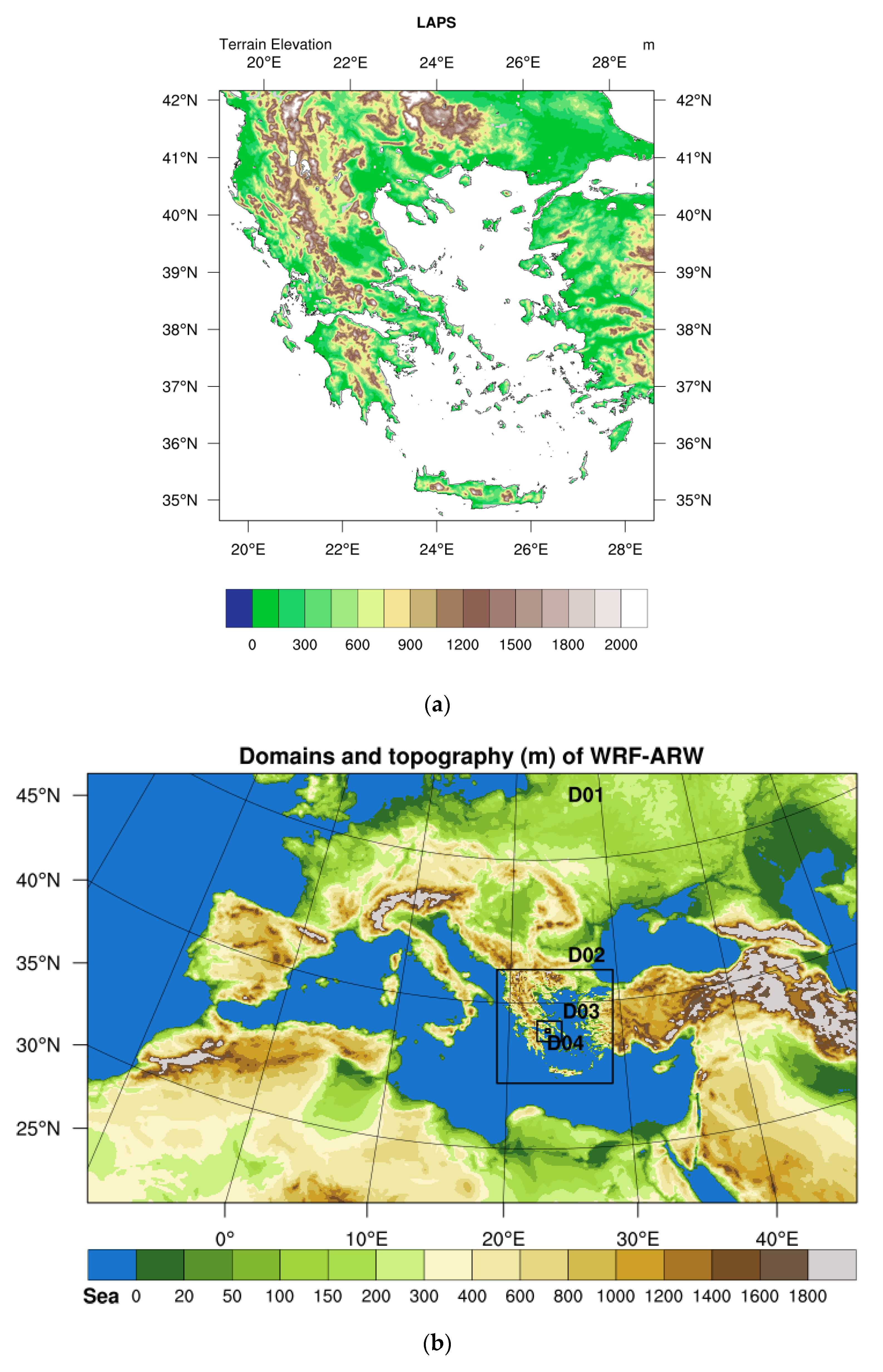
3.1. Local Analysis and Prediction System (LAPS) and Precipitation Advection
3.2. Data Used for Assimilation
- Meteorological Aerodrome Reports (METAR) observations come from surface-weather observation stations and airports from all over the world, and are normally generated per hour. METAR reports contain information concerning temperature, dew point, wind direction and speed, precipitation, cloud cover and heights, visibility, and barometric pressure.
- Surface Synoptic Observations (SYNOP) data are generated to carry more information. Comparing METARS and SYNOP, information about the weather that is carried by METARS is less than the one that is carried by SYNOPS [55].
- Aircraft Communications Addressing and Reporting System (ACARS) are observation systems that are sent as short messages from the aircraft to ground stations, via a very high frequency (VHF) communication or satellite communication [56].
- RAOB data are vertical profiles of the atmosphere that are taken from radiosondes launched from the ground and are used to measure soundings of wind, temperature, moisture, and geopotential.
- The Global Precipitation Measurement (GPM) program is a satellite mission launched by National Aeronautics and Space Administration (NASA) and Japan Aerospace Exploration Agency (JAXA) in 2014 [57,58]. The main goal of this program was to improve weather forecasts, climate modeling, and hydrological modeling, and to have a better understanding of water cycle variability and freshwater availability [58,59]. The main GPM product is the IMERG (Integrated Multi-satellitE Retrievals for GPM), which is an algorithm that calibrates and combines precipitation data and generates near real-time global precipitation data [60,61].
- X-band dual-polarization (XPOL) radar data. The XPOL ground radar is operated by the National Observatory of Athens and is located on Penteli Mountain. The radar is located 35 km east of the Mandra town, and provides continuous measurements of severe precipitation events, like the one studied in this work. The radar scans the surrounding areas during precipitation events in the plan position indicator (PPI) mode, taking measurements in a sector scan of 180°, at 3 different elevation sweeps (0.5°, 1°, and 2.5°), with a range resolution of 120 m (65 km at maximum). The antenna rotation rate was 6 degs/s and the time-period for a full volume scan was 3 min or less. The Self-Consistent Optimal Parameterization-Microphysics Estimation (SCOPE-ME) algorithm [62,63] was used to retrieve the precipitation values.
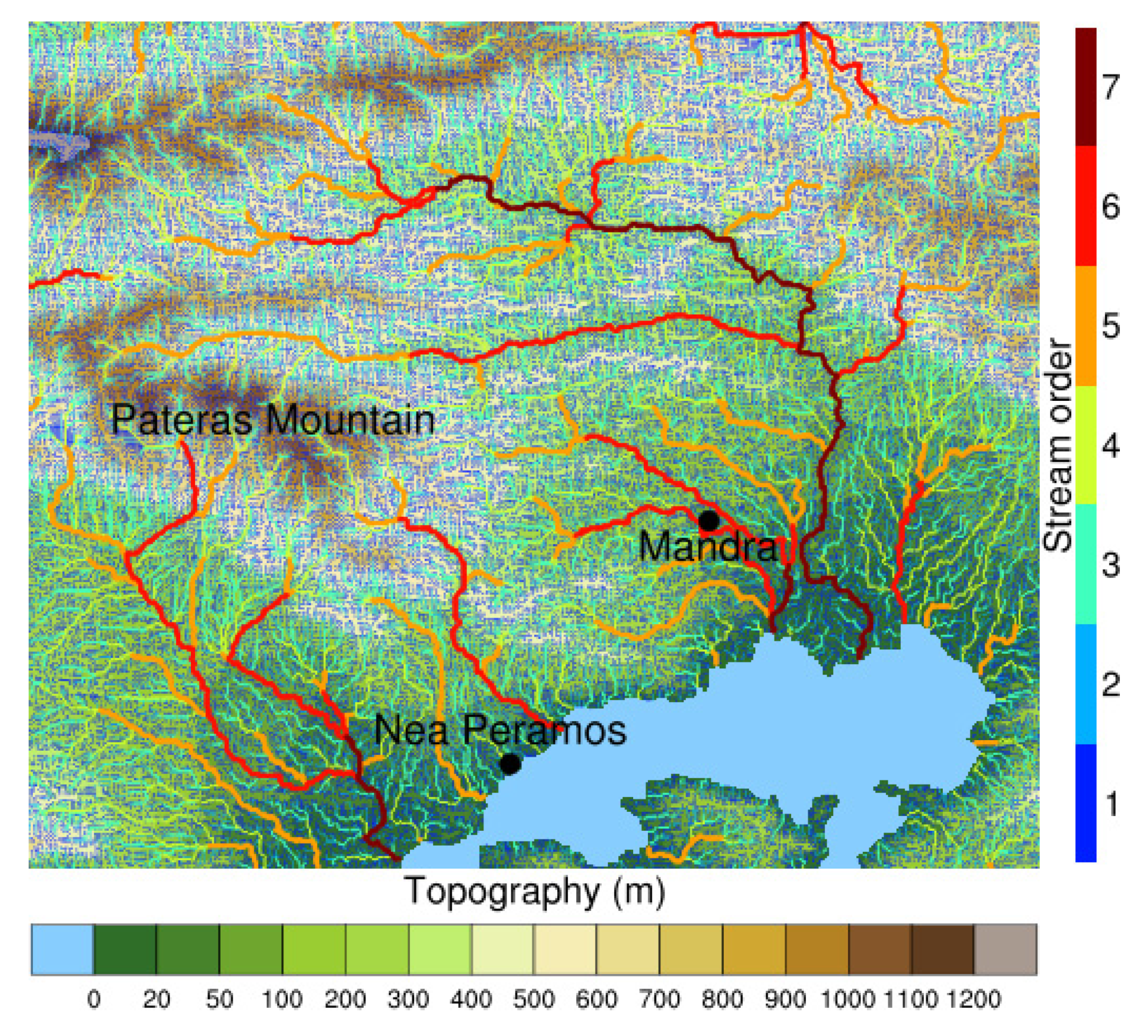
3.3. WRF-Hydro Hydrological Model
4. Experimental Design and Evaluation
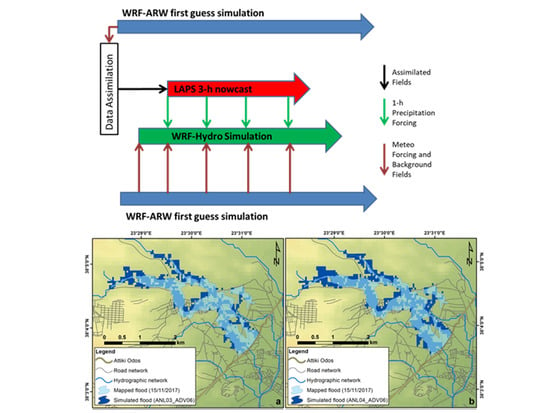
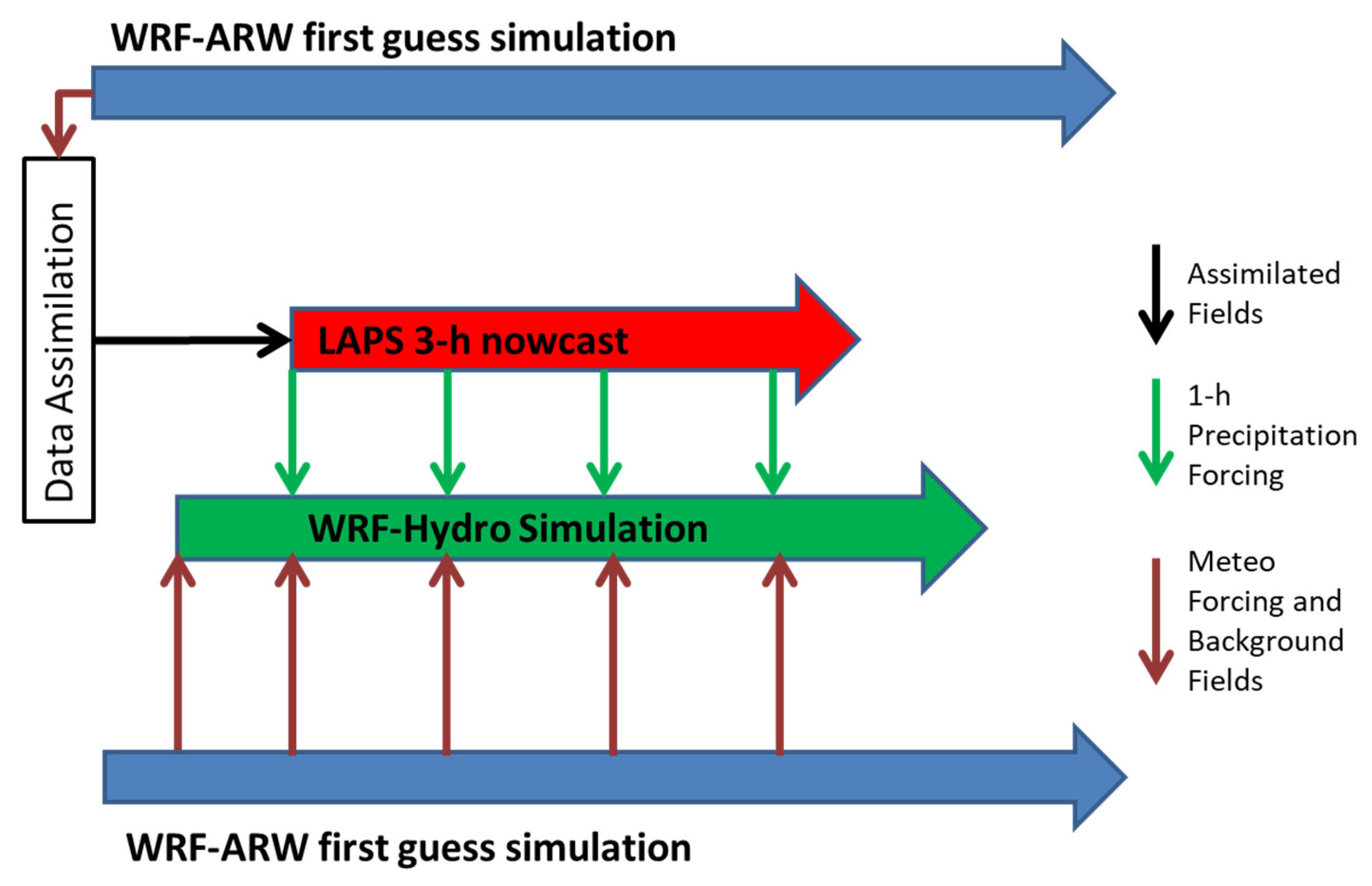
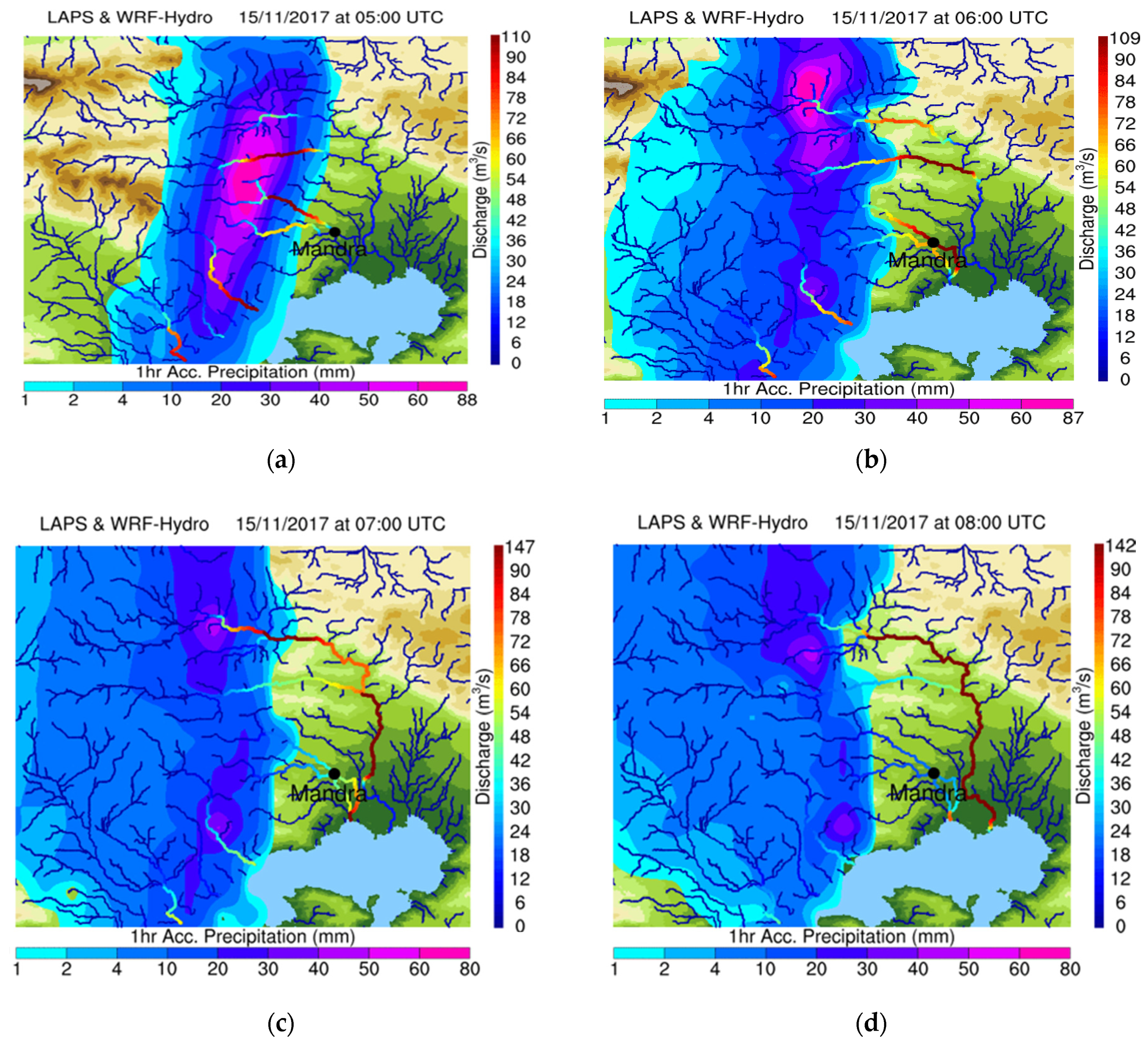
- LAPS used the output fields from the atmospheric component (WRF-ARW) of CHAOS, namely surface and model levels fields of u-, v- components of wind, temperature, relative humidity and 1 h accumulated precipitation as background data (first-guess). Additionally, all available measurements were assimilated into the system (as presented in Section 3), with the most important being the XPOL radar data when available. LAPS ran every hour from 14 November at 14:00 UTC up to 15 November at 06:00 UTC, and produced analysis fields, as well as advected 1 h accumulated precipitation fields for a 3 h forecasting horizon.
- These precipitation fields were then fed into the hydrological component (WRF-Hydro) of CHAOS, which estimated the streamflow discharge, in order to potentially estimate the stream channels that were most susceptible to extreme flooding. WRF-Hydro was forced by LAPS to run for a 1-h analysis period and a 3-h forecasting horizon (4 h in total), applying cycling and preserving the hydrological properties in the consecutive simulations. Therefore, WRF-Hydro ran every hour from 14 November at 13:00 UTC up to 15 November at 05:00 UTC, i.e., 1 h before the LAPS analyses, to capture the estimation of 1 h accumulated precipitation analyses before the 3 h forecasts. The process was described schematically in Figure 4. WRF-Hydro simulations were performed according to the setup described in Section 3.3. As described in Varlas et al. [36], WRF-Hydro demands various forcing fields, i.e., liquid water precipitation rate, air temperature, and specific humidity at 2 m, incoming shortwave and longwave radiation, u- and v-components of wind at 10 m, and surface pressure.
5. Results and Evaluation
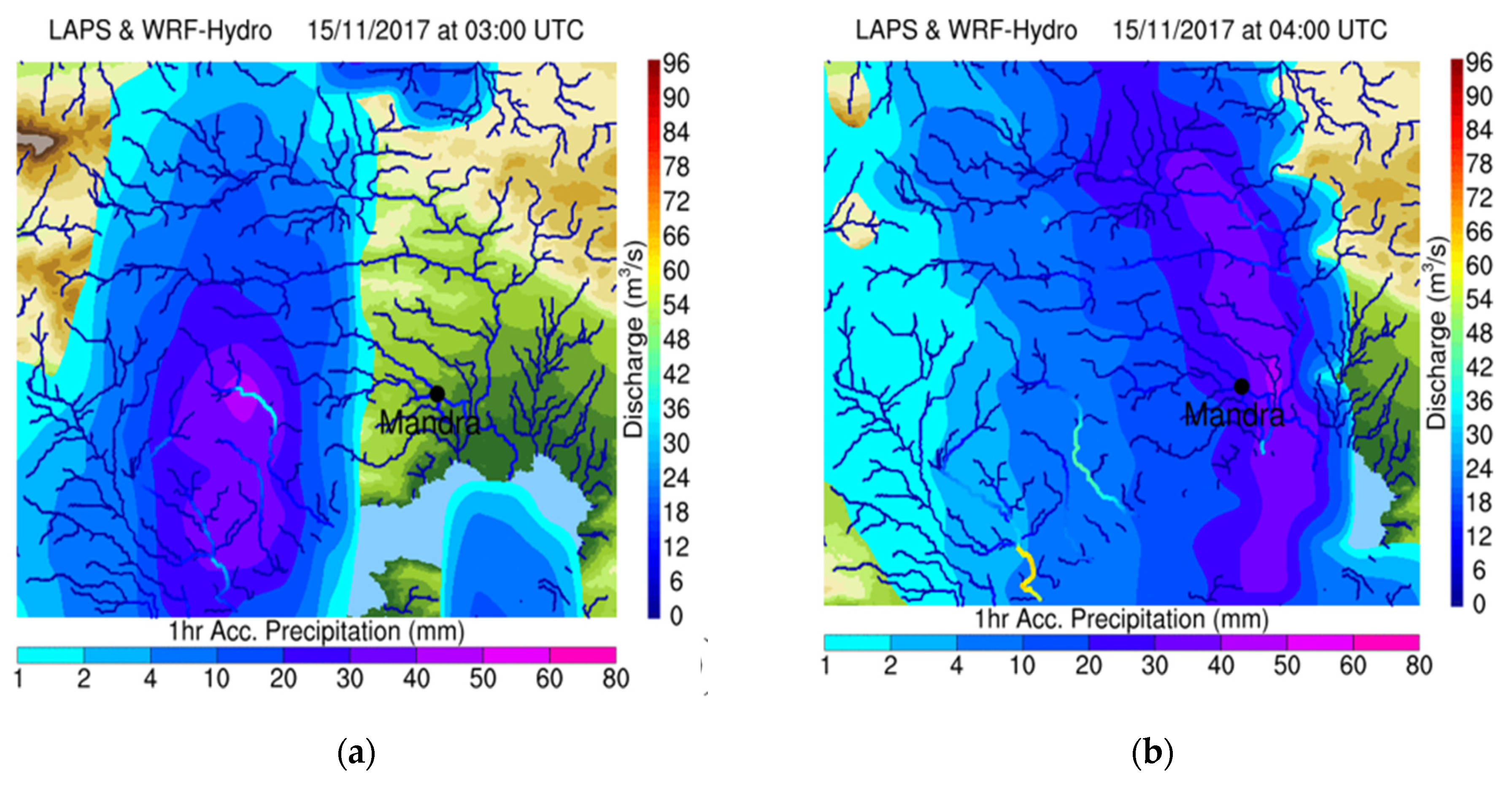
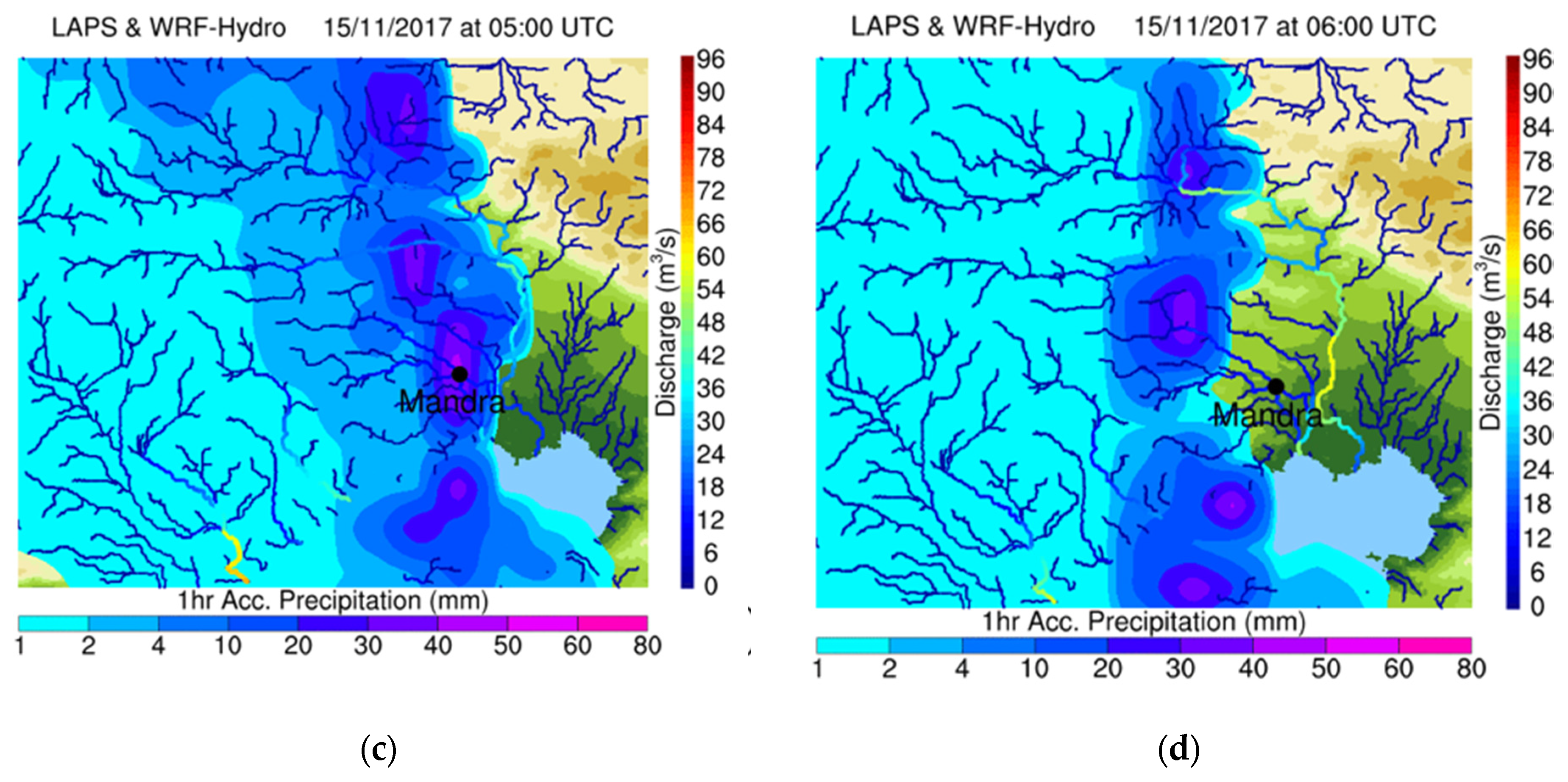
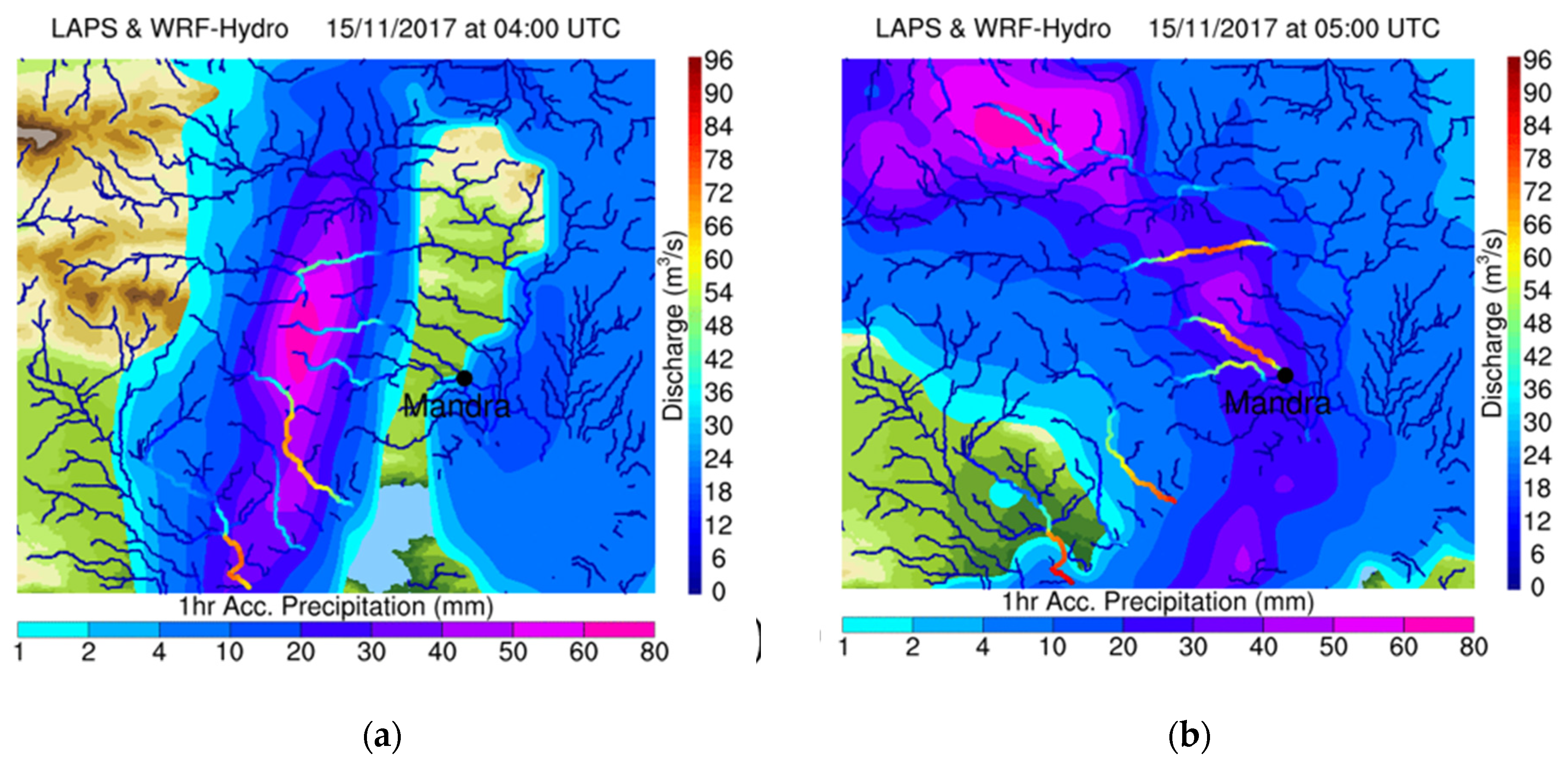
5.1. Nowcasting of Precipitation and Discharge
5.2. Evaluation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Seneviratne, S.; Nicholls, N.; Easterling, D.; Goodess, C.; Kanae, S.; Kossin, J.; Luo, Y.; Marengo, J.; McInnes, K.; Rahimi, M.; et al. Changes in climate extremes and their impacts on the natural physical environment. In Managing the Risks of Extreme Events and Disasters to Advance Climate Change Adaptation; Barros, C.B.V., Stocker, T.F., Qin, D., Dokken, D.J., Ebi, K.L., Mastrandrea, M.D., Mach, K.J., Plattner, G.-K., Allen, S.K., Tignor, M., et al., Eds.; A Special Report of Working Groups I and II of the Intergovernmental Panel on Climate Change (IPCC); Cambridge University Press: Cambridge, UK; New York, NY, USA, 2012; pp. 109–230. [Google Scholar]
- Collins, M.; Sutherland, M.; Bouwer, L.; Cheong, S.-M.; Frölicher, T.; Jacot Des Combes, H.; Koll Roxy, M.; Losada, I.; McInnes, K.; Ratter, B.; et al. Extremes, Abrupt Changes and Managing Risk. In IPCC Special Report on the Ocean and Cryosphere in a Changing Climate; Pörtner, H.-O., Roberts, D.C., Masson-Delmotte, V., Zhai, P., Tignor, M., Poloczanska, E., Mintenbeck, K., Alegría, A., Nicolai, M., Okem, A., et al., Eds.; 2019; in press. [Google Scholar]
- Smith, A.B.; Katz, R.W. US billion-dollar weather and climate disasters: Data sources, trends, accuracy and biases. Nat. Hazards 2013, 67, 387–410. [Google Scholar] [CrossRef]
- Hirabayashi, Y.; Mahendran, R.; Koirala, S.; Konoshima, L.; Yamazaki, D.; Watanabe, S.; Kim, H.; Kanae, S. Global flood risk under climate change. Nat. Clim. Chang. 2013, 3, 816–821. [Google Scholar] [CrossRef]
- CRED. Natural Disasters. Available online: https://www.cred.be/sites/default/files/CREDNaturalDisaster2018.pdf (accessed on 25 June 2020).
- Meehl, G.A.; Arblaster, J.M.; Tebaldi, C. Understanding future patterns of precipitation extremes in climate model simulations. Geophys. Res. Lett. 2005, 32, L18719. [Google Scholar] [CrossRef]
- Mentzafou, A.; Varlas, G.; Dimitriou, E.; Papadopoulos, A.; Pytharoulis, I.; Katsafados, P. Modeling the Effects of Anthropogenic Land Cover Changes to the Main Hydrometeorological Factors in a Regional Watershed, Central Greece. Climate 2019, 7, 129. [Google Scholar] [CrossRef]
- UNISDR. Early Warning Practices Can Save Many Lives: Good Practices and Lessons Learned; UNISDR: Bonn, Germany, 2010; pp. 1–67. [Google Scholar]
- Wilson, J.W.; Crook, N.A.; Mueller, C.K.; Sun, J.; Dixon, M. Nowcasting thunderstorms: A status report. Bull. Am. Meteorol. Soc. 1998, 79, 2079–2100. [Google Scholar] [CrossRef]
- Wilson, J.W.; Ebert, E.E.; Saxen, T.R.; Roberts, R.D.; Mueller, C.K.; Sleigh, M.; Pierce, C.E.; Seed, A. Sydney 2000 forecast demonstration project: Convective storm nowcasting. Weather Forecasting. 2004, 19, 131–150. [Google Scholar] [CrossRef]
- Liguori, S.; Rico-Ramirez, M.A. Quantitative assessment of short-term rainfall forecasts from radar nowcasts and MM5 forecasts. Hydrol. Process. 2012, 26, 3842–3857. [Google Scholar] [CrossRef]
- Liu, Z.; Dai, Q.; Zhuo, L. Relationship between Rainfall Variability and the Predictability of Radar Rainfall Nowcasting Models. Atmosphere 2019, 10, 458. [Google Scholar] [CrossRef]
- Wang, Y.; Meirold-Mautner, I.; Kann, A.; Slak, A.Š.; Simon, A.; Vivoda, J.; Bica, B.; Böcskör, E.; Brezková, L.; Dantinger, J.; et al. Integrating nowcasting with crisis management and risk prevention in a transnational and interdisciplinary framework. Meteorol. Z. 2017, 26, 459–473. [Google Scholar] [CrossRef]
- Wapler, K.; Bañón Peregrín, L.M.; Buzzi, M.; Heizenreder, D.; Kann, A.; Meirold-Mautner, I.; Simon, A.; Wang, Y. Conference Report 2nd European Nowcasting Conference. Meteorol. Z. 2018, 27, 81–84. [Google Scholar] [CrossRef]
- Pulkkinen, S.; Chandrasekar, V.; Harri, A.M. Fully Spectral Method for Radar-Based Precipitation Nowcasting. J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1369–1382. [Google Scholar] [CrossRef]
- Huang, L.X.; Isaac, G.A.; Sheng, G. Integrating NWP Forecasts and Observation Data to Improve Nowcasting Accuracy. Weather Forecast. 2012, 27, 938–953. [Google Scholar] [CrossRef]
- Browning, K.; Collier, C.; Larke, P.; Menmuir, P.; Monk, G.; Owens, R. On the Forecasting of Frontal Rain Using a Weather Radar Network. Mon. Weather Rev. 1982, 110, 534–552. [Google Scholar] [CrossRef][Green Version]
- Benjamin, S.G.; Dévényi, D.; Weygandt, S.S.; Brundage, K.J.; Brown, J.M.; Grell, G.A.; Kim, D.; Schwartz, B.E.; Smirnova, T.G.; Smith, T.L.; et al. An Hourly Assimilation–Forecast Cycle: The RUC. Mon. Weather Rev. 2004, 132, 495–518. [Google Scholar] [CrossRef]
- Mass, C. Nowcasting: The Promise of New Technologies of Communication, Modeling, and Observation. Bull. Am. Meteorol. Soc. 2012, 93, 797–809. [Google Scholar] [CrossRef][Green Version]
- Pierce, C.; Ebert, E.; Seed, A.; Sleigh, M.; Collier, C.; Fox, N.; Donaldson, N.; Wilson, J.W.; Roberts, R.; Mueller, C.K. The Nowcasting of Precipitation during Sydney 2000: An Appraisal of the QPF Algorithms. Weather Forecast. 2004, 19, 7–21. [Google Scholar] [CrossRef]
- Wilson, J.; Feng, Y.; Chen, M.; Roberts, R. Nowcasting Challenges during the Beijing Olympics: Successes, Failures, and Implications for Future Nowcasting Systems. Weather Forecast. 2010, 25, 1691–1714. [Google Scholar] [CrossRef]
- Miyoshi, T.; Kondo, K.; Terasaki, K. Big Ensemble Data Assimilation in Numerical Weather Prediction. Computer 2015, 48, 15–21. [Google Scholar] [CrossRef]
- Kalnay, E. Atmospheric Modeling, Data Assimilation and Predictability; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Khare, S.P.; Anderson, J.L. An examination of ensemble filter based adaptive observation methodologies. Tellus A 2006, 58, 179–195. [Google Scholar] [CrossRef]
- Zhang, F.; Snyder, C.; Sun, J. Impacts of initial estimate and observation availability on convective-scale data Assimilation with an Ensemble Kalman Filter. Mon. Weather Rev. 2004, 132, 1238–1253. [Google Scholar] [CrossRef]
- Dixon, M.; Wiener, G. TITAN: Thunderstorm Identification, Tracking, Analysis, and Nowcasting—A Radar-based Methodology. J. Atmos. Oceanic Technol. 1993, 10, 785–797. [Google Scholar] [CrossRef]
- Ruzanski, E.; Chandrasekar, V.; Wang, Y. The CASA nowcasting system. Journal of Atmospheric and Oceanic Technology. J. Atm. Ocean Technol. 2011, 28, 640–655. [Google Scholar] [CrossRef]
- Haiden, T.; Kann, A.; Wittmann, C.; Pistotnik, G.; Bica, B.; Gruber, C. The Integrated Nowcasting through Comprehensive Analysis (INCA) System and Its Validation over the Eastern Alpine Region. Weather Forecast. 2011, 26, 166–183. [Google Scholar] [CrossRef]
- Bowler, N.E.; Pierce, C.E.; Seed, A.W. STEPS: A probabilistic precipitation forecasting scheme which merges an extrapolation nowcast with downscaled NWP. Q. J. R. Meteorol. Soc. 2006, 132, 2127–2155. [Google Scholar] [CrossRef]
- Seed, A.W.; Pierce, C.E.; Norman, K. Formulation and evaluation of a scale decomposition-based stochastic precipitation nowcast scheme. Wat. Resour. Res. 2013, 49, 6624–6641. [Google Scholar] [CrossRef]
- Auger, L.; Dupont, O.; Hagelin, S.; Brousseau, P.; Brovelli, P. AROME–NWC: A new nowcasting tool based on an operational mesoscale forecasting system. Q. J. Roy. Meteor. Soc. 2015, 141, 1603–1611. [Google Scholar] [CrossRef]
- Albers, S. The LAPS wind analysis. Weather Forecast. 1995, 10, 342–352. [Google Scholar] [CrossRef]
- Albers, S.C.; Mcginley, J.A.; Birkenheuer, D.L.; Smart, J.R. The Local Analysis and Prediction System (LAPS): Analyses of Clouds, Precipitation, and Temperature. Weather Forecast. 1996, 11, 273–287. [Google Scholar] [CrossRef]
- Varlas, G. Development of an Integrated Modeling System for Simulating the Air-Ocean Wave Interactions. Ph.D. Thesis, Harokopio University of Athens (HUA), Athens, Greece, 2017. Available online: https://www.didaktorika.gr/eadd/handle/10442/41238 (accessed on 21 April 2020).
- Varlas, G.; Katsafados, P.; Papadopoulos, A.; Korres, G. Implementation of a two-way coupled atmosphere-ocean wave modeling system for assessing air-sea interaction over the Mediterranean Sea. Atmos. Res. 2018, 208, 201–217. [Google Scholar] [CrossRef]
- Varlas, G.; Anagnostou, M.; Spyrou, C.; Papadopoulos, A.; Kalogiros, J.; Mentzafou, A.; Michaelides, S.; Baltas, E.; Karymbalis, E.; Katsafados, P. A Multi-Platform Hydrometeorological Analysis of the Flash Flood Event of 15 November 2017 in Attica, Greece. Remote Sens. 2019, 11, 45. [Google Scholar] [CrossRef]
- Varlas, G.; Spyrou, C.; Papadopoulos, A.; Korres, G.; Katsafados, P. One-year assessment of the CHAOS two-way coupled atmosphere-ocean wave modelling system over the Mediterranean and Black Seas. Mediter. Mar. Sci. 2020, 21, 372–385. [Google Scholar] [CrossRef]
- Katsafados, P.; Varlas, G.; Papadopoulos, A.; Spyrou, C.; Korres, G. Assessing the implicit rain impact on sea state during hurricane Sandy (2012). Geophys. Res. Lett. 2018, 45, 12015–12022. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Liu, Z.; Berner, J.; Wang, W.; Powers, J.G.; Duda, M.G.; Barker, D.M.; et al. A Description of the Advanced Research WRF Version 4; NCAR Technical Note NCAR/TN-556+STR; NCAR: Boulder, CO, USA, 2019. [Google Scholar] [CrossRef]
- Powers, J.G.; Klemp, J.B.; Skamarock, W.C.; Davis, C.A.; Dudhia, J.; Gill, D.O.; Coen, J.L.; Gochis, D.J.; Ahmadov, R.; Peckham, S.E.; et al. The Weather Research and Forecasting Model: Overview, System Efforts, and Future Directions. Bull. Am. Meteor. Soc. 2017, 98, 1717–1737. [Google Scholar] [CrossRef]
- Gochis, D.J.; Yu, W.; Yates, D.N. The WRF-Hydro Model Technical Description and User’s Guide, Version 3.0; NCAR Technical Document; NCAR: Boulder, CO, USA, 2015; Available online: https://ral.ucar.edu/sites/default/files/public/images/project/WRF_Hydro_User_Guide_v3.0.pdf (accessed on 25 June 2020).
- Diakakis, M.; Andreadakis, E.; Nikolopoulos, E.I.; Spyrou, N.I.; Gogou, M.E.; Deligiannakis, G.; Katsetsiadou, N.K.; Antoniadis, Z.; Melaki, M.; Georgakopoulos, A.; et al. An integrated approach of ground and aerial observations in flash flood disaster investigations. The case of the 2017 Mandra flash flood in Greece. Int. J. Disast. Risk Red. 2019, 33, 290–309. [Google Scholar] [CrossRef]
- Stamou, A.I. The disastrous flash flood of Mandra in Attica-Greece and now what? Civ. Eng. Res. J. 2018, 6, 1–6. [Google Scholar] [CrossRef][Green Version]
- Mavrakis, A.; Theoharatos, G.; Asimakopoulos, D.; Christides, A. Distribution of the trace metals in sediments of Eleusis Gulf. Mediterr. Mar. Sci. 2004, 5, 151–158. [Google Scholar] [CrossRef]
- Bellos, V.; Papageorgaki, I.; Kourtis, I.; Vangelis, H.; Kalogiros, I.; Tsakiris, G. Reconstruction of a flash flood event using a 2D hydrodynamic model under spatial and temporal variability of storm. Nat. Hazards 2020, 101, 711–726. [Google Scholar] [CrossRef]
- Alberoni, P.P.; Levizzani, V.; Mezzasalma, P.; Costa, S.; Rizzi, R. Impact of Meteorological Radar and Satellite Data onto Mesoscale Analyses. In Proceedings of the Mediterranean Storms-EGS Plinius Conference, Baja Sardinia, Italy, 16–18 October 2000; pp. 545–556. [Google Scholar]
- Hiemstra, C.A.; Liston, G.E.; Pielke, R.A., Sr.; Birkenheuer, D.L.; Albers, S. Comparing local analysis and prediction system (LAPS) assimilations with independent observations. Weather Forecast. 2006, 21, 1024–1040. [Google Scholar] [CrossRef]
- Barnes, S. A Technique for Maximizing Details in Numerical Weather Map Analysis. J. Appl. Meteor. 1964, 3, 396–409. [Google Scholar] [CrossRef]
- FAO. The Digitized Soil Map of the World, World Soil Resource Rep. 67; FAO: Rome, Italy, 1991. [Google Scholar]
- Csiszar, I.; Gutman, G. Mapping global land surface albedo from NOAA/AVHRR. J. Geophys. Res. 1999, 104, 6215–6228. [Google Scholar] [CrossRef]
- Valcke, S.; Craig, T.; Coquart, L. OASIS3-MCT_3.0 Coupler User Guide; CERFACS/CNRS: Toulouse, France, 2015; Available online: http://www.cerfacs.fr/oa4web/oasis3-mct_3.0/oasis3mct_UserGuide.pdf (accessed on 25 June 2020).
- Craig, A.; Valcke, S.; Coquart, L. Development and performance of a new version of the OASIS coupler, OASIS3-MCT_3.0. Geosci. Model Dev. 2017, 10, 3297–3308. [Google Scholar] [CrossRef]
- Group, T.W. The WAM model—A third generation ocean wave prediction model. J. Phys. Oceanogr. 1988, 18, 1775–1810. [Google Scholar] [CrossRef]
- Komen, G.J.; Cavaleri, L.; Donelan, M.; Hasselmann, K.; Hasselmann, S.; Janssen, P.A.E.M. Dynamics and Modelling of Ocean Waves; Cambridge University Press: Cambridge, UK, 1994. [Google Scholar]
- AWN’s Digital Atmosphere Page. Available online: http://www.australianweathernews.com/digatm/ (accessed on 7 June 2020).
- NCEP Restricted Data-ACARS and AMDAR. Available online: https://www.nco.ncep.noaa.gov/pmb/docs/restricted_data/acars+amdar/ (accessed on 23 April 2020).
- Sharifi, E.; Steinacker, R.; Saghafian, B. Assessment of GPM-IMERG and Other Precipitation Products against Gauge Data under Different Topographic and Climatic Conditions in Iran: Preliminary Results. Remote Sens. 2016, 8, 135. [Google Scholar] [CrossRef]
- Global Precipitation Measurement (GPM) Mission Overview_Precipitation Measurement Missions. Available online: https://pmm.nasa.gov/GPM (accessed on 21 June 2020).
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The global precipitation measurement mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J. Integrated Multi-Satellite Retrievals for GPM (IMERG) Technical Documentation; NASA/GSFC: Greenbelt, MD, USA, 2015. Available online: https://gpm.nasa.gov/sites/default/files/document_files/IMERG_doc.pdf (accessed on 7 June 2020).
- Tong, K.; Zhao, Y.; Wei, Y.; Hu, B.; Lu, Y. Evaluation and Hydrological Validation of GPM Precipitation Products over the Nanliu River Basin, Beibu Gulf. Water 2018, 10, 1777. [Google Scholar] [CrossRef]
- Anagnostou, M.N.; Kalogiros, J.; Marzano, F.S.; Anagnostou, E.N.; Montopoli, M.; Picciotti, E. Performance evaluation of a new dual-polarization microphysical algorithm based on long-term X-band radar and disdrometer observations. J. Hydrometeorol. 2013, 14, 560–576. [Google Scholar] [CrossRef]
- Kalogiros, J.; Anagnostou, M.N.; Anagnostou, E.N.; Montopoli, M.; Picciotti, E.; Marzano, F.S. Evaluation of a new polarimetric algorithm for rain-path attenuation correction of X-band radar observations against disdrometer. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1369–1380. [Google Scholar] [CrossRef]
- Lehner, B.; Verdin, K.; Jarvis, A. New Global Hydrography Derived from Spaceborne Elevation Data. EOS Trans. Am. Geophys. Union. 2008, 89, 93–94. [Google Scholar] [CrossRef]
- Jarvis, A.; Reuter, H.I.; Nelson, A.; Guevara, E. Hole-Filled SRTM for the Globe Version 4. CGIAR-CSI SRTM 90 m Database. Available online: http://srtm.csi.cgiar.org (accessed on 21 April 2020).
- Papaioannou, G.; Varlas, G.; Terti, G.; Papadopoulos, A.; Loukas, A.; Panagopoulos, Y.; Dimitriou, E. Flood Inundation Mapping at Ungauged Basins Using Coupled Hydrometeorological–Hydraulic Modelling: The Catastrophic Case of the 2006 Flash Flood in Volos City, Greece. Water 2019, 11, 2328. [Google Scholar] [CrossRef]
- FloodHub. Analysis of the Flood in Western Attica on 15/11/2017 Using Satellite Remote Sensing. 2018. Available online: http://www.beyond-eocenter.eu/images/news-events/20180430/Mandra-Report-BEYOND.pdf (accessed on 6 June 2020). (In Greek).
- Chen, S.T.; Yu, P.S. Real-time probabilistic forecasting of flood stages. J. Hydrol. 2007, 340, 63–77. [Google Scholar] [CrossRef]
- Wilson, L.J. Verification of Precipitation Forecasts: A Survey of Methodology. Part I: General Framework and Verification of Continuous Variables. In Proceedings of the WWRP/WMO Workshop on the Verification of Quantitative Precipitation Forecasts, Prague, Czech Republic, 14–16 May 2001. [Google Scholar]
- World Meteorological Organization. Forecast Verification for the African Severe Weather Forecasting Demonstration Projects; No. 1132; World Meteorological Organization: Geneva, Switzerland, 2014; Available online: https://www.wmo.int/pages/prog/www/Documents/1132_en.pdf (accessed on 6 June 2020).
- Brown, B.G. Verification of Precipitation Forecasts: A Survey of Methodology. Part II: Verification of Probability Forecasts at Points. In Proceedings of the WWRP/WMO Workshop on the Verification of Quantitative Precipitation Forecasts, Prague, Czech Republic, 14–16 May 2001. [Google Scholar]
- Ehrendorfer, M.; Murphy, A.H. Comparative evaluation of weather forecasting systems: Sufficiency, quality, and accuracy. Mon. Weather Rev. 1988, 116, 1757–1770. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stream Order | Manning | CBW (m) | IWD (m) | CSS |
|---|---|---|---|---|
| 1 | 0.3 | 1 | 0.05 | 1.0 |
| 2 | 0.3 | 2 | 0.05 | 0.8 |
| 3 | 0.25 | 3 | 0.1 | 0.6 |
| 4 | 0.2 | 4 | 0.1 | 0.4 |
| 5 | 0.15 | 6 | 0.1 | 0.2 |
| 6 | 0.1 | 8 | 0.2 | 0.1 |
| 7 | 0.05 | 10 | 0.2 | 0.05 |
| Yes | No | PoD = a/(a + c) | ||
| Observed event | FAR = b/(a + b) | |||
| Yes | Simulated event | Hit (a) | False alarm (b) | CSI = a/(a + b + c) |
| No | Miss (c) | Correct non-event (d) | B = (a + b)/(a + c) | |
| Starting Date | Forecast Hour | PoD | CSI | FAR | B |
|---|---|---|---|---|---|
| 15/11 at 03:00 ANL03_ADV06 | +0 h | 0.46 | 0.35 | 0.42 | 0.79 |
| +1 h | 0.45 | 0.34 | 0.42 | 0.77 | |
| +2 h | 0.48 | 0.35 | 0.42 | 0.82 | |
| +3 h | 0.49 | 0.36 | 0.41 | 0.83 | |
| 15/11 at 04:00 ANL04_ADV06 | +0 h | 0.43 | 0.33 | 0.42 | 0.74 |
| +1 h | 0.51 | 0.36 | 0.45 | 0.93 | |
| +2 h | 0.61 | 0.42 | 0.42 | 1.05 | |
| +3 h | 0.53 | 0.39 | 0.41 | 0.90 | |
| 15/11 at 05:00 ANL05_ADV06 | +0 h | 0.48 | 0.34 | 0.46 | 0.89 |
| +1 h | 0.67 | 0.45 | 0.43 | 1.16 | |
| +2 h | 0.58 | 0.41 | 0.42 | 1.00 | |
| +3 h | 0.53 | 0.38 | 0.42 | 0.90 | |
| CHAOS | - | 0.43 | 0.33 | 0.43 | 0.75 |
| Radar Data 15/11 at 06:00 RAD06 | +0 h | 0.68 | 0.45 | 0.43 | 1.18 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spyrou, C.; Varlas, G.; Pappa, A.; Mentzafou, A.; Katsafados, P.; Papadopoulos, A.; Anagnostou, M.N.; Kalogiros, J. Implementation of a Nowcasting Hydrometeorological System for Studying Flash Flood Events: The Case of Mandra, Greece. Remote Sens. 2020, 12, 2784. https://doi.org/10.3390/rs12172784
Spyrou C, Varlas G, Pappa A, Mentzafou A, Katsafados P, Papadopoulos A, Anagnostou MN, Kalogiros J. Implementation of a Nowcasting Hydrometeorological System for Studying Flash Flood Events: The Case of Mandra, Greece. Remote Sensing. 2020; 12(17):2784. https://doi.org/10.3390/rs12172784
Chicago/Turabian StyleSpyrou, Christos, George Varlas, Aikaterini Pappa, Angeliki Mentzafou, Petros Katsafados, Anastasios Papadopoulos, Marios N. Anagnostou, and John Kalogiros. 2020. "Implementation of a Nowcasting Hydrometeorological System for Studying Flash Flood Events: The Case of Mandra, Greece" Remote Sensing 12, no. 17: 2784. https://doi.org/10.3390/rs12172784
APA StyleSpyrou, C., Varlas, G., Pappa, A., Mentzafou, A., Katsafados, P., Papadopoulos, A., Anagnostou, M. N., & Kalogiros, J. (2020). Implementation of a Nowcasting Hydrometeorological System for Studying Flash Flood Events: The Case of Mandra, Greece. Remote Sensing, 12(17), 2784. https://doi.org/10.3390/rs12172784