Internal Waves at the UK Continental Shelf: Automatic Mapping Using the ENVISAT ASAR Sensor



Abstract
1. Introduction
2. Study Region and Datasets
2.1. Study Region
2.2. ENVISAT ASAR Data
3. Methods
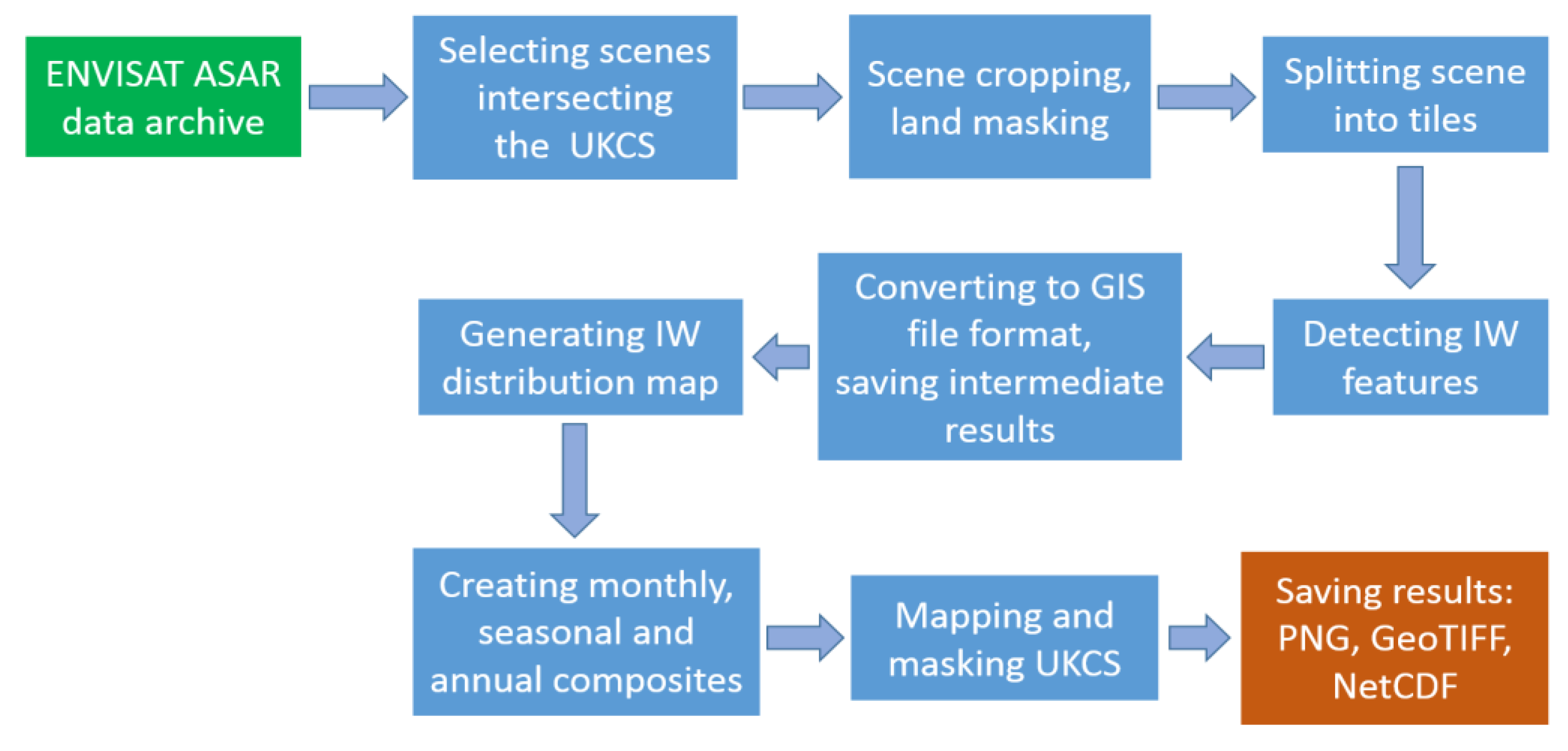
3.1. Data Processing Chain
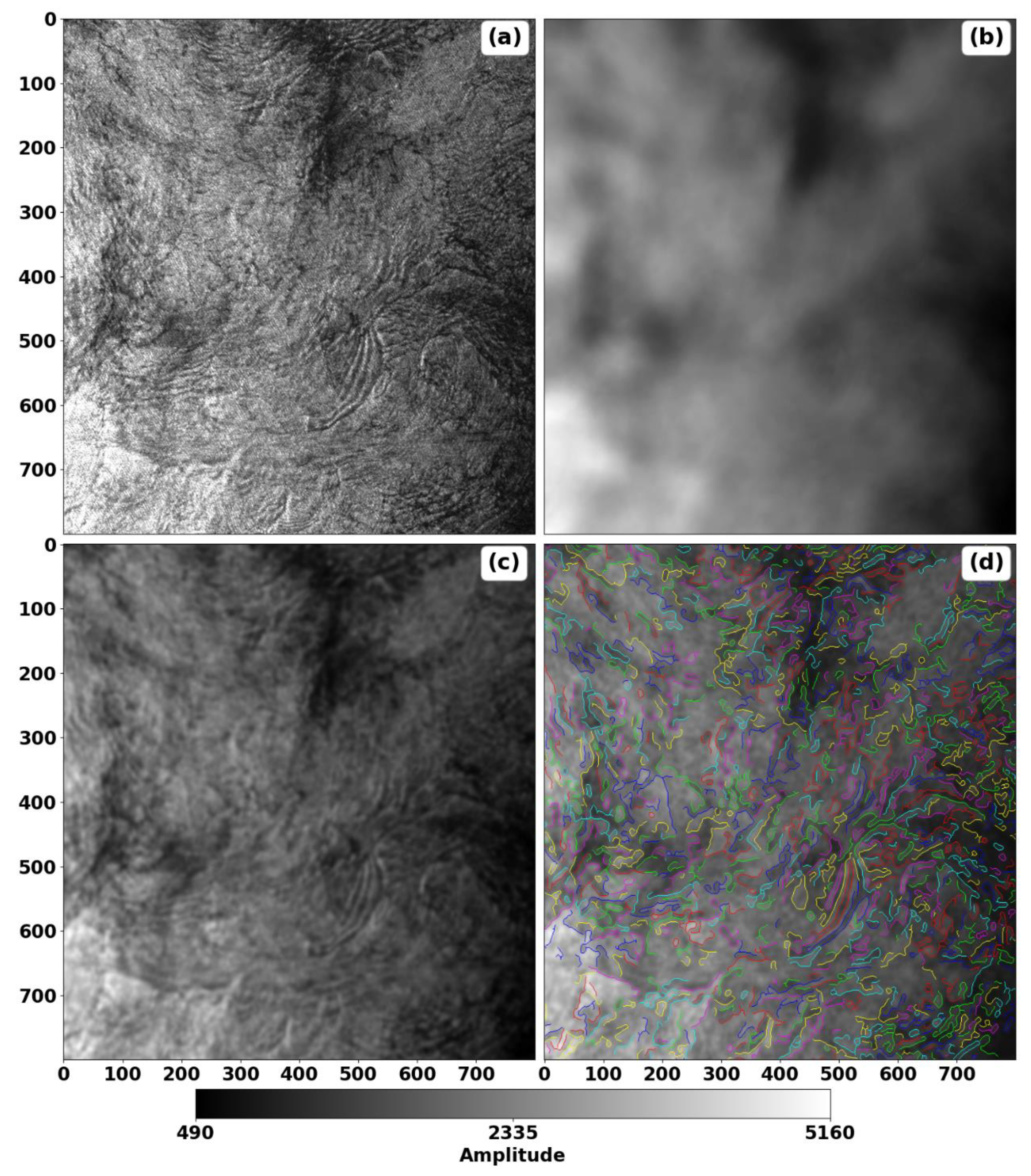
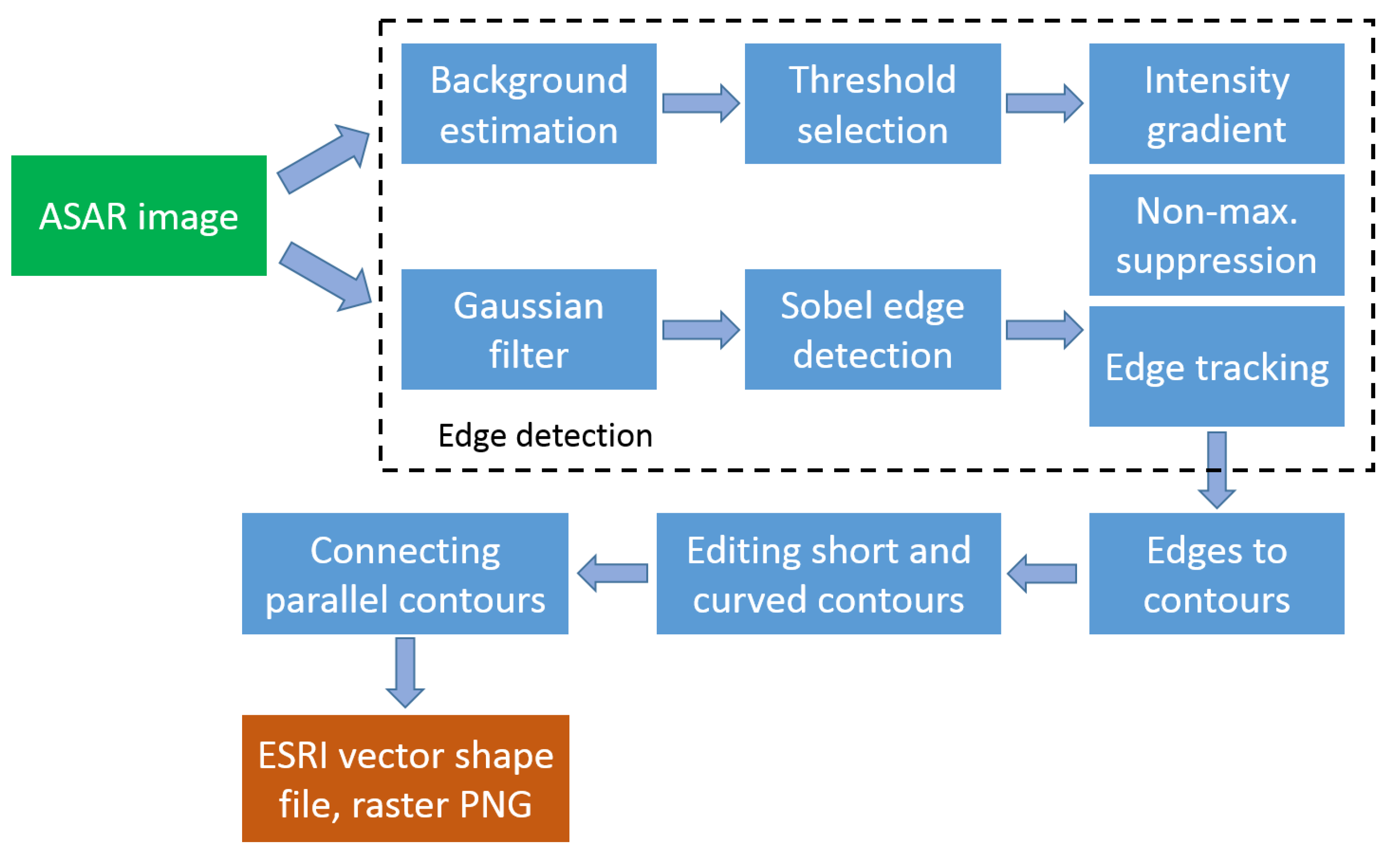
3.2. Automatic Detection of IWs
3.2.1. Implementing Canny Edge Detection
3.2.2. Algorithm Tuning
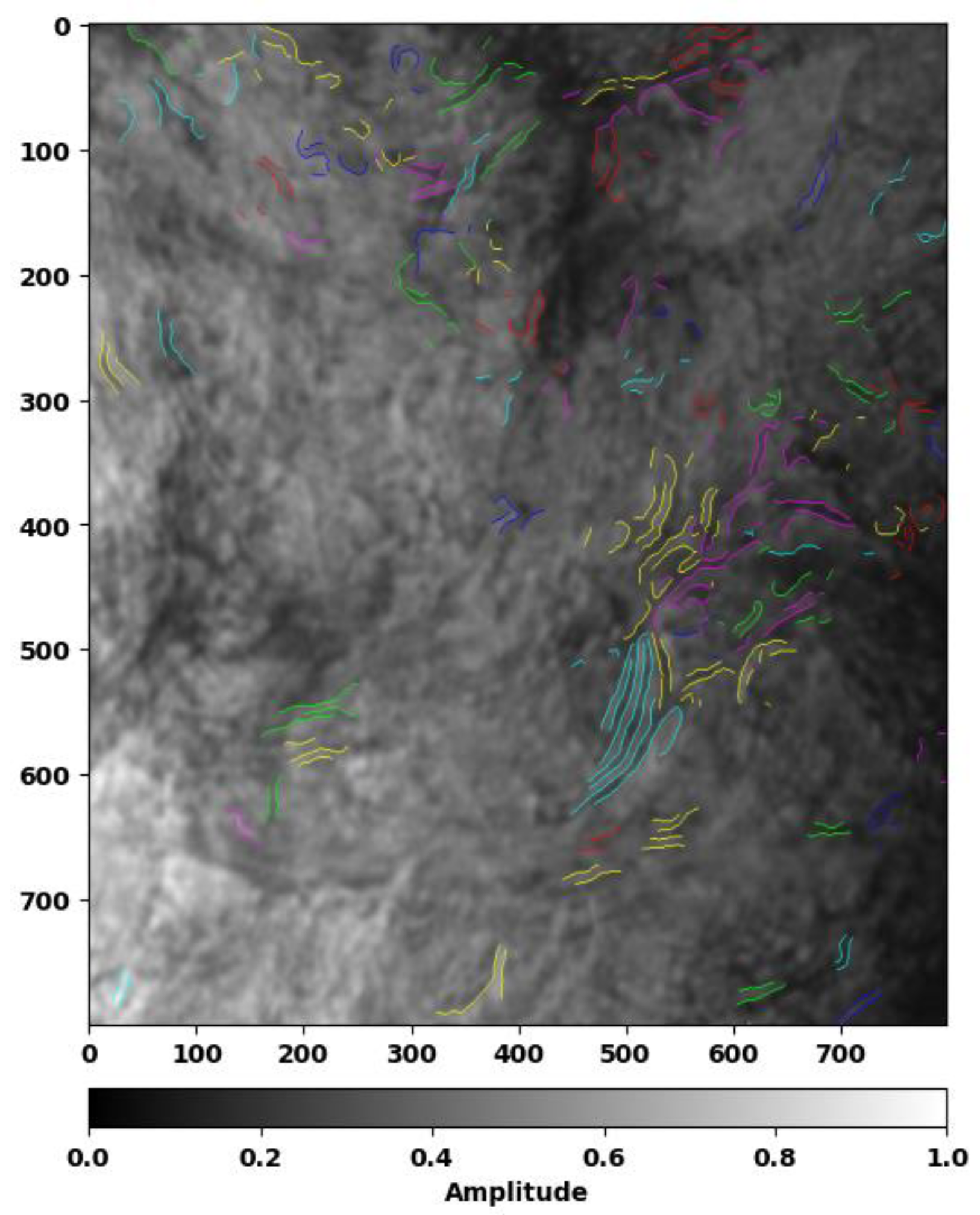
3.2.3. Filtering and Grouping of IWs
3.3. Distribution of IWs
4. Results and Discussion
4.1. Distribution of IWs
4.2. Evaluation Results
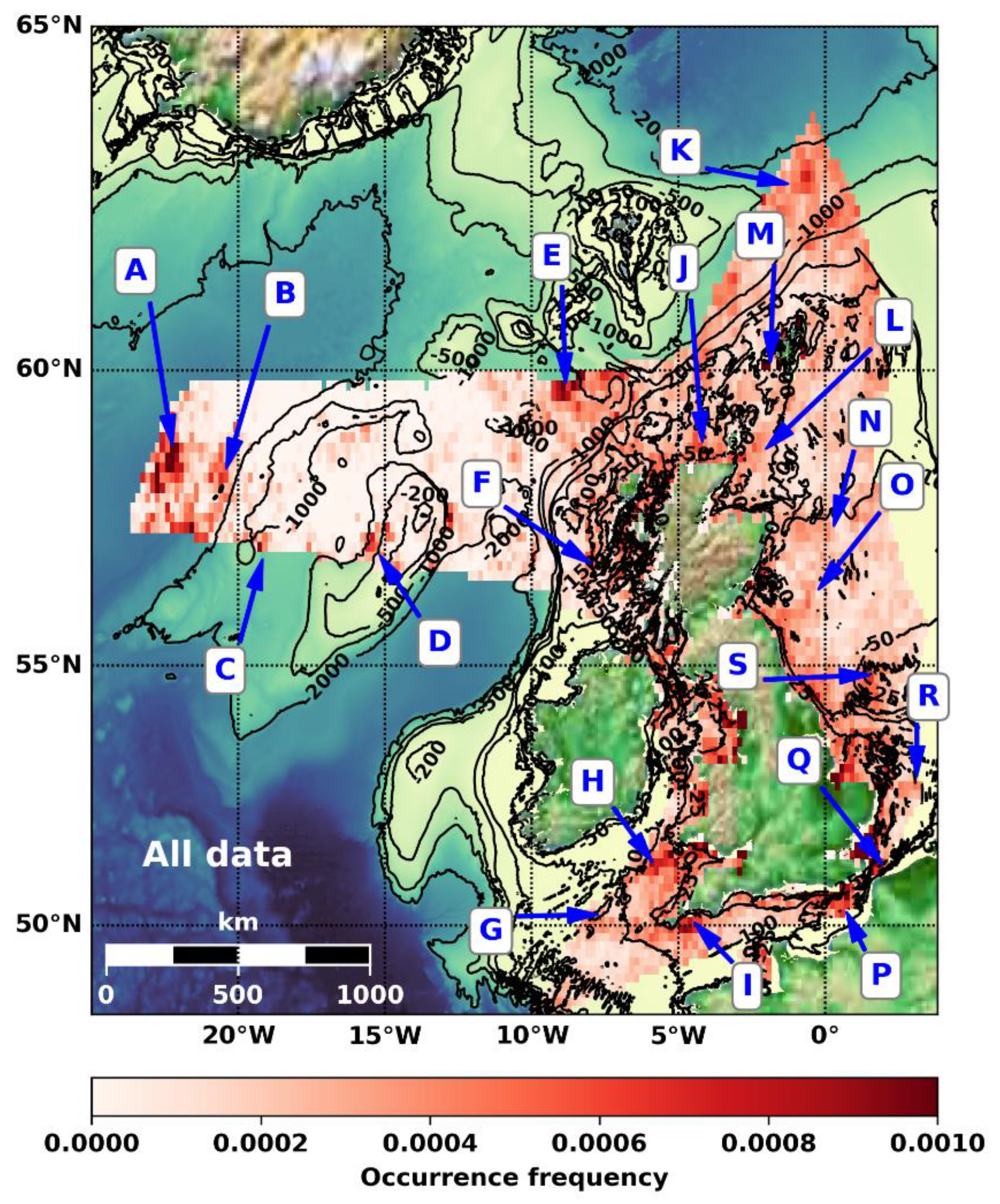
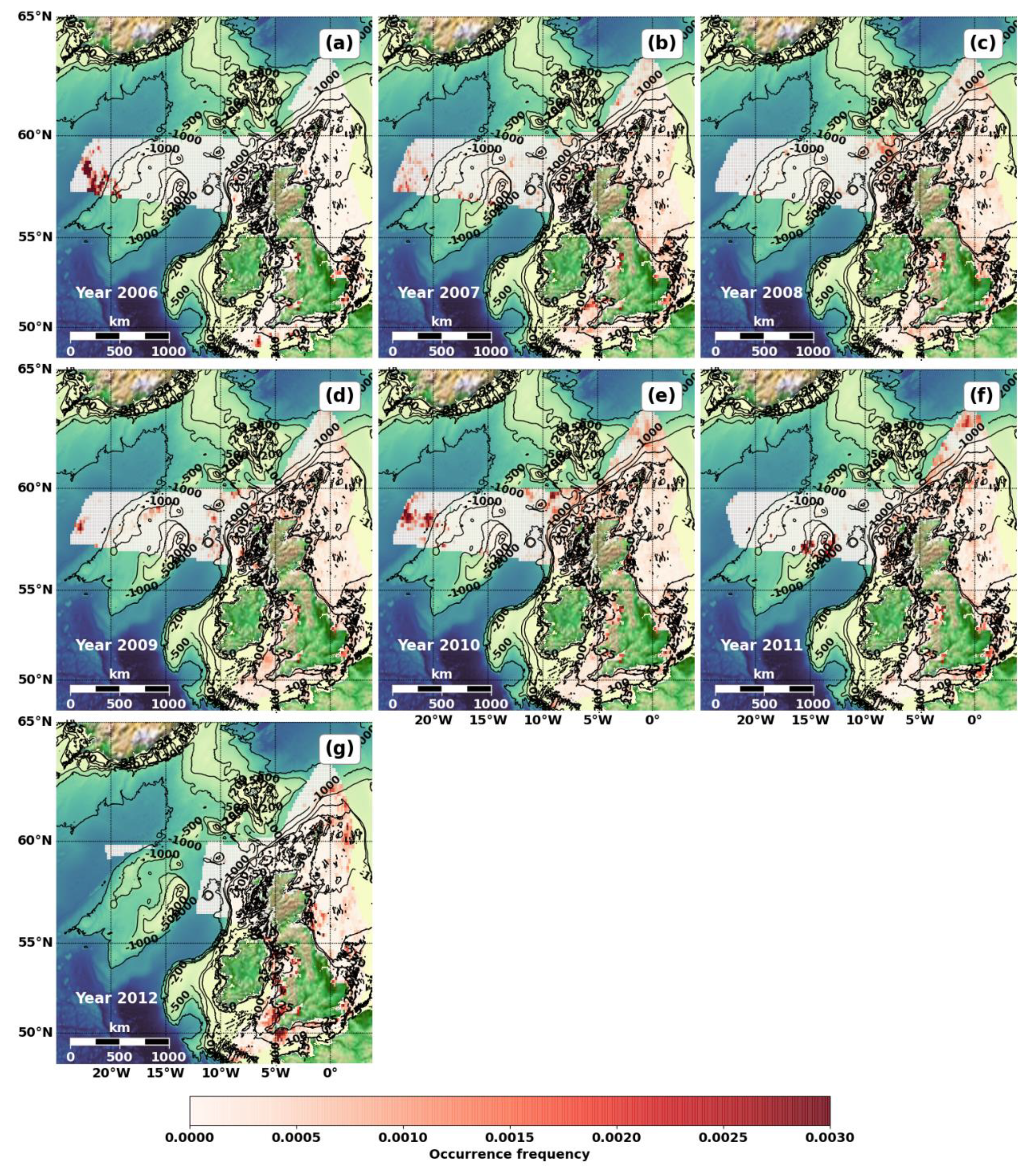
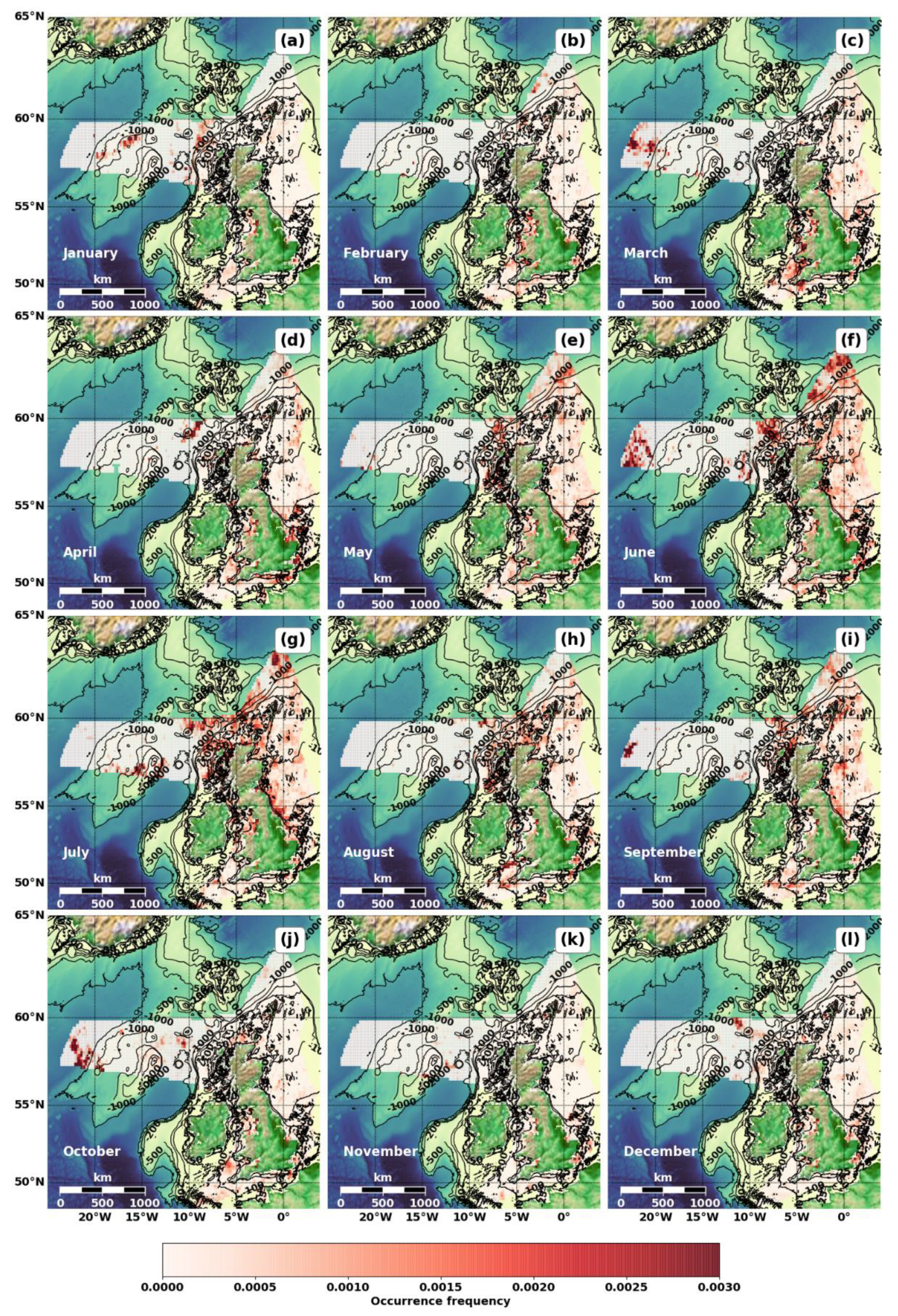
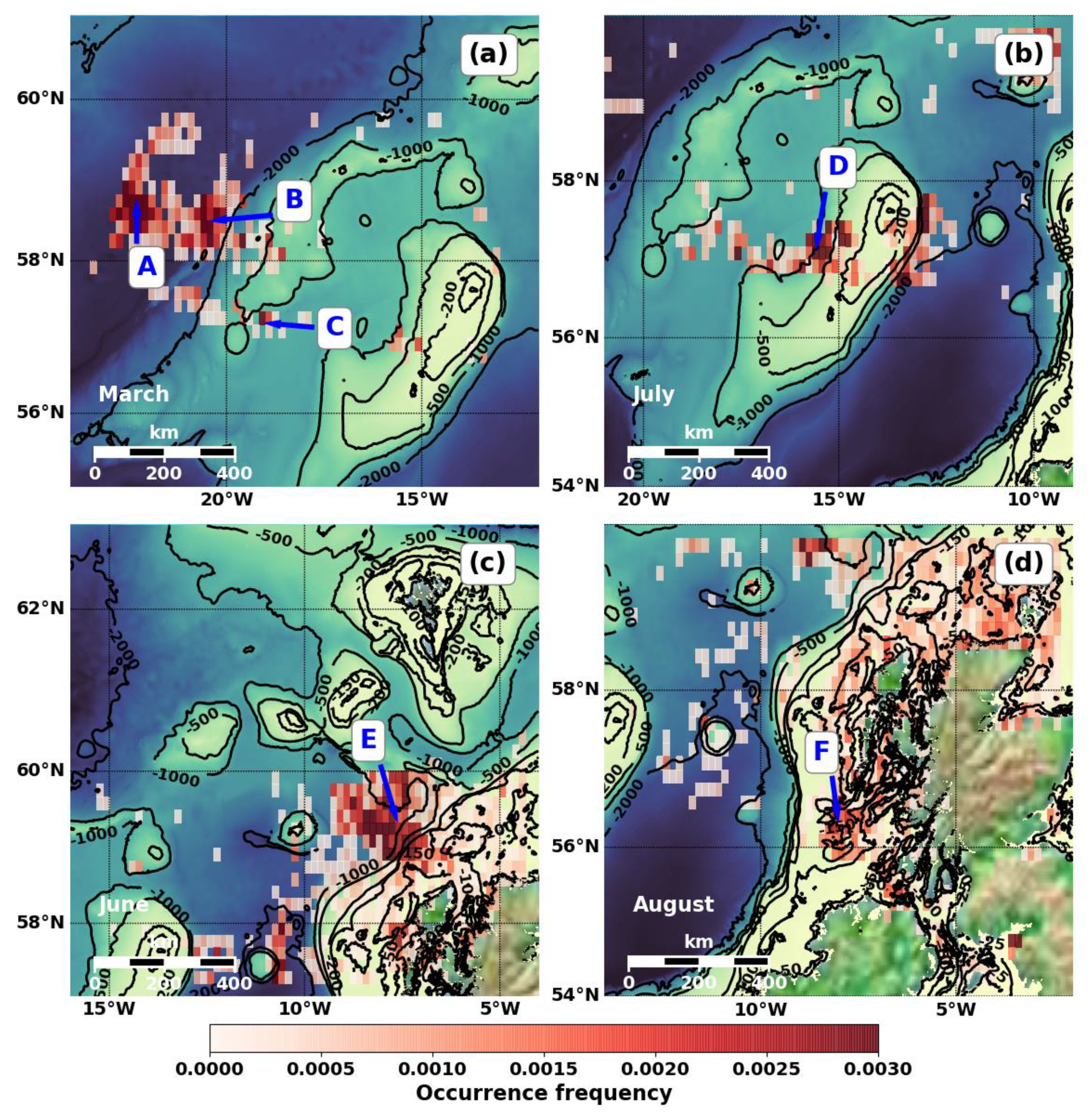
- A (see Figure 13a): A very strong, localised feature is visible close to the westernmost extremity of the UKCS in the Iceland Basin, centred on about 58° 30′N, 22° 30′W in waters around 3000 m deep, around 150 km from the nearest bathymetric feature, Hatton Bank, which at its shallowest is around 500 m deep. This feature appears mainly in 2006, 2010 and weakly in 2009, most strongly in March and October, slightly further south in September and in a more dispersed form in June.
- B (see Figure 13a): Separated from feature A to the east is a generally more dispersed feature that runs along the western edge of Hatton Bank between the southern edge of the UKCS at about 57°N, 22°W and about 59°N, 20°W, appearing in 2006 and 2010 and in the same months except in September. This suggests that the features are related, e.g., non-horizontally-propagating IWs may be generated at the edge of Hatton Bank and propagate down to the seafloor and back up to the Icelandic Basin.
- C (see Figure 13a): A small, distinct feature is visible on the southern edge of Hatton Bank at the edge of the UKCS at about 57°N, 19°W, appearing strongly in October 2006, with weaker features dispersed northwards from this feature along the southern edge of Hatton Bank to about 59°N, 15°W, appearing strongly in January 2009.
- D (see Figure 13b): A weak, dispersed feature is visible at the western edge of the Rockall Bank at about 57°N, 15° 30′W, appearing strongly in July 2011.
- E (see Figure 13c): A strong, localised feature is visible at the southern edge of the Faroe Bank at the edge of the UKCS at about 60°N, 9°W, appearing mostly in 2009–2010 from April–August.
- F (see Figure 13d): A weak linear feature runs N-S on the Hebridean Shelf west of the Outer Hebrides from 56 to 58°N, 8°W, at about 100 m depth, appearing mostly in 2009 and 2011, most strongly in May and July, also in August–September.
- G: A weak linear feature runs E-W on the Celtic Shelf at 50°N from Jones Bank at the edge of the UKCS at about 8°W to Land’s End at 6°W, at about 100 m depth, appearing in 2007, 2009 and 2011 in March–April and July–September.
- H: A stronger linear feature runs north of the Bristol Channel from about 51°N, 7°W to the southwestern tip of Wales at 51°30′N, 6°W, at 50 to 120 m depth, appearing strongly with distinct linearity in August 2007.
- I: A small, distinct feature is visible off the Lizard peninsula in Cornwall at 50°N, 5°W, at 80 to 90 m depth, appearing strongly in March 2012.
- J: A small feature is visible off the north coast of Scotland at about 58°N, 4°W, at 60 to 90 m depth, appearing in 2009–2011, most strongly in July and December.
- K: A broad region of indistinct features is visible in and on the southeast edge of the Faroe-Shetland Channel, northwest of a line between 59°N, 5°W and the edge of the UKCS at 62°N, 2°E, appearing in variable locations in 2007–2012, mostly in May–July and strong features in the middle of the Channel in February 2007 and in the north in June–July 2011.
- L: Another broad feature extends from the northeast tip of Scotland at 58°30′N, 3°W to the northeast, passing southeast of Shetland and across Viking Bank to the edge of the UKCS at 61°30′N, 2°E, close to the Norwegian Trough, at 50 to 180 m depth, appearing mainly in 2011–12 but also in 2008–2010, very distinctly in September, less so in May-August and faintly through most of the year.
- M: A strong, highly distinct feature visible in a fixed location west of Shetland at 60°N, 2°W, appearing equally in all years and months and probably an artefact relating to the island of Foula.
- N: A broad, weak feature is visible east of Scotland centered on 57°30′N, 1°W, at 60 to 120 m depth, appearing in 2007–2009 and 2011, most strongly in September but also from May–August.
- O: A broad feature is visible extending from the Northumberland coast at 55°30′N, 1°30′W to 56°N, 30′W at 50 to 90 m depth, appearing from 2007–2012 in March, May–July and September–October.
- P: A small but strong feature is visible off the south Kent coast at 50°30′N, 1°E at about 30 m depth, appearing in 2010–2011 in March, July–August and October.
- Q: A very strong feature, visible in a fixed location in the Thames estuary centered on 51°30′N, 2°E at 10 to 20 m depth and appearing throughout the year is probably an artefact due to artificial structures.
- R: A broad, weak feature is visible east of the Humber centred on 53°30′N, 2°E at 15 to 30 m depth, appearing in most years and months but most strongly in 2006 and 2010–2011 and in April. At this depth, and with this consistency of appearance, it is possible that the feature is due to seabed effects on surface waves.
- S: A broad feature is visible over Dogger Bank at 54°30′N, 2°E at 15 to 25 m depth, appearing in all years and most months, most strongly from March to July. At this depth, and with this consistency of appearance, it is possible that the feature is due to seabed effects on surface waves.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rodenas, J.A.; Garello, R. Wavelet analysis in SAR ocean image profiles for internal wave detection and wavelength estimation. IEEE Trans. Geosci. Remote Sens. 1997, 35, 933–945. [Google Scholar] [CrossRef]
- Changbao, Z.; Jingsong, Y.; Weigen, H.; Bin, F.; Aigin, S.; Donglin, L. Satellite SAR Remote Sensing of Ocean Internal Waves. In Proceedings of the 20th Asian Conference on Remote Sensing (ACRS), Hong Kong Convention and Exhibition Centre, Hong Kong, China, 22–25 November 1999; p. 5. [Google Scholar]
- Rodenas, J.; Garello, R. Internal wave detection and location in SAR images using wavelet transform. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1494–1507. [Google Scholar] [CrossRef]
- Simonin, D.; Tatnall, A.R.; Robinson, I.S. The automated detection and recognition of internal waves. Int. J. Remote Sens. 2009, 30, 4581–4598. [Google Scholar] [CrossRef]
- Bao, S.; Meng, J.; Sun, L.; Liu, Y. Detection of ocean internal waves based on Faster R-{CNN} in SAR images. J. Oceanol. Limnol. 2020, 38, 55–63. [Google Scholar] [CrossRef]
- Dokken, S.T.; Olsen, R.; Wahl, T.; Tantillo, M.V. Identification and characterization of internal waves in SAR images along the coast of Norway. Geophys. Res. Lett. 2001, 28, 2803–2806. [Google Scholar] [CrossRef]
- Zhao, Z.; Klemas, V.; Zheng, Q.; Yan, X.H. Remote sensing evidence for baroclinic tide origin of internal solitary waves in the northeastern South China Sea. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Lorenzzetti, J.A.; Dias, F.G. Internal Solitary Waves in the Brazilian SE Continental Shelf: Observations by Synthetic Aperture Radar. Int. J. Oceanogr. 2013, 2013, 403259. [Google Scholar] [CrossRef]
- Kozlov, I.E.; Kudryavtsev, V.N.; Zubkova, E.V.; Zimin, A.V.; Chapron, B. Characteristics of short-period internal waves in the Kara Sea inferred from satellite SAR data. Izv. Atmos. Ocean. Phys. 2015, 51, 1073–1087. [Google Scholar] [CrossRef]
- Lavrova, O.; Kostianoy, A. Spatio-temporal variability of internal waves in the Caspian Sea, European Geosciences Union EGU 2020. Available online: https://meetingorganizer.copernicus.org/EGU2020/EGU2020-10011.html (accessed on 8 June 2020).
- Zhou, L.; Yang, J.; Wang, J.; He, S.; He, Z.; Liu, A.K.; Hsu, M.-K. Spatio-temporal distribution of internal waves in the Andaman Sea based on satellite remote sensing. In Proceedings of the 2016 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Datong, China, 15–17 October 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Ning, J.; Sun, L.; Cui, H.; Lu, K.; Wang, J. Study on characteristics of internal solitary waves in the Malacca Strait based on Sentinel-1 and GF-3 satellite SAR data. Acta Oceanol. Sin. 2020, 39, 15–156. [Google Scholar] [CrossRef]
- Mitnik, L.M.; Khazanova, E.S.; Dubina, V.A. Mesoscale and synoptic scale dynamic phenomena in the Oyashio current region observed in SAR imagery. Int. J. Remote Sens. 2019, 41, 5861–5883. [Google Scholar] [CrossRef]
- Gede, I.G.; Chonnaniyah, K.A.; Osawa, T. Internal solitary wave observations in the Flores Sea using the Himawari-8 geostationary satellite. Int. J. Remote Sens. 2019, 41, 5726–5742. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Narayanaswamy, B.E.; Bett, B.J.; Hughes, D.J. Deep-water macrofaunal diversity in the Faroe-Shetland region (NE Atlantic): A margin subject to an unusual thermal regime. Mar. Ecol. 2010, 31, 237–246. [Google Scholar] [CrossRef]
- Watson, R.; Albon, S.; Aspinall, R.; Austen, M.; Bardgett, B.; Bateman, I.; Berry, P.; Bird, W.; Bradbury, R.; Brown, C. UK National Ecosystem Assessment: Technical Report; United Nations Environment Programme World Conservation Monitoring Centre: Cambridge, UK, 2011. [Google Scholar]
- GEBCO Bathymetric Compilation Group. The GEBCO_2020 Grid—A Continuous Terrain Model of the Global Oceans and Land; British Oceanographic Data Centre; National Oceanography Centre; NERC: Liverpool, UK, 2020. [Google Scholar] [CrossRef]
- Ward, K.D.; Tough, R.J.A.; Watts, S. Sea clutter: Scattering, the K distribution and radar performance. Waves Random Complex Media 2007, 17, 233–234. [Google Scholar] [CrossRef]
- European Space Agency. ASAR Product Handbook, ESA 2007, Issue 2.2. Available online: http://envisat.esa.int/handbooks/asar/CNTR.html (accessed on 8 June 2020).
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing Active and Passive-Volume II: Radar Remote Sensing and Surface Scattering and Emission Theory; Addison-Wesley: Boston, MA, USA, 1982; 628p, ISBN-13: 978-0890061916. [Google Scholar]
- Kulemin, G.P. Millimeter-Wave Radar Targets and Clutter; Artech House: Boston, MA, USA, 2003; 344p, ISBN-13: 978-1580535403. [Google Scholar]
- Oliver, C.; Quegan, S. Understanding Synthetic Aperture Radar Images; SciTech Publishing: Raleigh, NC, USA, 2004; 510p, ISBN-13: 978-1891121319. [Google Scholar]
- Goodman, J.E.; O’Rourke, J. Chapter 43: Nearest neighbours in high-dimensional spaces. In Handbook of Discrete and Computational Geometry, 3rd ed.; Goodman, J.E., O’Rourke, J., Csaba, D.T., Eds.; CRC Press LLC: Boca Raton, FL, USA, 2017; pp. 1135–1155, ISBN-13: 978-1584883012. [Google Scholar]
- Elliott, A.J.; Clarke, T. Seasonal stratification in the northwest European shelf seas. Cont. Shelf Res. 1991, 11, 467–492. [Google Scholar] [CrossRef]
- Jackson, C.R. Northeast Atlantic. In An Atlas of Internal Solitary-like Waves and Their Properties, 2nd ed.; Global Ocean Associates: Alexandria, VA, USA, 2004; pp. 121–150. Available online: http://www.internalwaveatlas.com/Atlas2_index.html (accessed on 23 July 2020).
- Small, J.; Hallock, Z.; Pavey, G.; Scott, J. Observations of large amplitude internal waves at the Malin Shelf edge during SESAME 1995. Cont. Shelf Res. 1999, 19, 1389–1436. [Google Scholar] [CrossRef]
- Stashchuk, N.; Vlasenko, V. Bottom trapped internal waves over the Malin Sea continental slope. Deep Sea Res. Part I Oceanogr. Res. Pap. 2017, 119, 68–80. [Google Scholar] [CrossRef]
- Hall, R.A.; Huthnance, J.M.; Williams, R.G. Internal tides, nonlinear internal wave trains, and mixing in the Faroe-Shetland Channel. J. Geophys. Res. 2011, 116, 1–15. [Google Scholar] [CrossRef]
- Vlasenko, V.; Stashchuk, N. Tidally Induced Overflow of the Faroese Channels Bottom Water Over the Wyville Thomson Ridge. J. Geophys. Res. Oceans 2018, 123, 6753–6765. [Google Scholar] [CrossRef]
- Vlasenko, V.; Stashchuk, N.; Palmer, M.R.; Inall, M.R. Generation of baroclinic tides over an isolated underwater bank. J. Geophys. Res. Oceans 2013, 118, 4395–4408. [Google Scholar] [CrossRef]
- Palmer, M.R.; Inall, M.E.; Sharples, J. The physical oceanography of Jones Bank: A mixing hotspot in the Celtic Sea. Prog. Oceanogr. 2013, 117, 9–24. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Month | Number of Overpasses |
|---|---|
| January | 83 |
| February | 78 |
| March | 109 |
| April | 69 |
| May | 85 |
| June | 70 |
| July | 64 |
| August | 85 |
| September | 83 |
| October | 79 |
| November | 52 |
| December | 51 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurekin, A.A.; Land, P.E.; Miller, P.I. Internal Waves at the UK Continental Shelf: Automatic Mapping Using the ENVISAT ASAR Sensor. Remote Sens. 2020, 12, 2476. https://doi.org/10.3390/rs12152476
Kurekin AA, Land PE, Miller PI. Internal Waves at the UK Continental Shelf: Automatic Mapping Using the ENVISAT ASAR Sensor. Remote Sensing. 2020; 12(15):2476. https://doi.org/10.3390/rs12152476
Chicago/Turabian StyleKurekin, Andrey A., Peter E. Land, and Peter I. Miller. 2020. "Internal Waves at the UK Continental Shelf: Automatic Mapping Using the ENVISAT ASAR Sensor" Remote Sensing 12, no. 15: 2476. https://doi.org/10.3390/rs12152476
APA StyleKurekin, A. A., Land, P. E., & Miller, P. I. (2020). Internal Waves at the UK Continental Shelf: Automatic Mapping Using the ENVISAT ASAR Sensor. Remote Sensing, 12(15), 2476. https://doi.org/10.3390/rs12152476