1. Introduction
Many Earth-observing satellite sensors have been developed with the primary objectives of serving either terrestrial, oceanic or atmospheric remote sensing applications [
1]). Since no satellite sensor specifically designed for coastal and inland waters is available at present [
2,
3,
4], data from these sensors are used for freshwater, estuarine and coastal water quality observations, bathymetry and benthic mapping [
5,
6,
7]. However, such land and ocean specific sensors are not designed for these complex aquatic environments and consequently are not likely to perform as well as a specialized coastal and inland water mapping sensor would.
Due to a lack of comprehensive information that would allow the design of a spaceborne sensor system optimized for the global monitoring of inland and coastal waters, the Committee on Earth Observation Satellites (CEOS) initiated a study [
1] which collected literature information and conducted simulations to derive requirements that could form the basis for developing such a dedicated sensor system. It identified the following parameters that such a system should be able to quantify: (i) algal pigment concentrations of chlorophyll-a, accessory pigments relevant for phytoplankton functional types research, phycoerythrin and phycocyanin for monitoring cyanobacteria; (ii) algal fluorescence, especially chlorophyll-a fluorescence at 684 nm; (iii) suspended matter concentration, possibly split up into organic and mineral components; (iv) absorption coefficient of colored dissolved organic matter (CDOM); (v) spectral slope of CDOM absorption to discriminate terrestrial from marine CDOM; (vi) spectral absorption and backscattering coefficients of the optically active components; (vii) measures of water transparency such as Secchi disk depth, vertical attenuation coefficient and turbidity index. For optically shallow waters, the following parameters were also identified: (viii) water column depth to derive bathymetry; (ix) substratum type and cover, such as muds, sands, coral rubble, seagrasses, macro-algae and corals; (x) plants floating at or just above the water surface.
The accuracy with which these parameters can be determined depends on a number of environmental and measurement conditions. The CEOS study [
1] addressed these conditions for satellite observation and discussed the related mission and sensor concepts. There is a trade-off in spectral, spatial and radiometric resolution as the number of photons available to be measured will constrain choices. For example, detecting a change of 10% in chlorophyll from a low Earth orbiter (LEO) satellite sensor at a high latitude in a northern or southern hemisphere winter requires a totally different radiometric sensitivity than detecting a similar change in the tropics with the sun close to zenith. One may think this can be solved by a geostationary orbit, but then the look angle from the equatorial position to the high latitudes becomes a limiting factor. In addition, spatial resolution and integration time also dictate how many photons are available to be measured: the finer spatial resolution advised for e.g., benthic feature mapping or smaller inland waters leads to reduced signal-to-noise ratios (SNRs).
To obtain an overview of the environmental and measurement conditions that are relevant for the majority of inland and coastal waters on Earth, a sensitivity analysis was made for the CEOS report (Appendix A.2 in [
1]). The simulations covered optically deep and shallow waters for concentrations of water constituents and for substratum cover types that are representative of many inland, coastal and shallow benthic environments across the world. The studied scenarios represent inland, estuarine, deltaic and near coastal waters with a variety of bottom substrates, such as sand, rock, silt, macrophytes, macro-algae, sea grasses and corals in the shallow areas. The derived set of parameters included the most relevant wavelengths and optimal spectral resolutions for capturing the spectral shape of remote sensing reflectance (
), wavelengths of maximum sensitivity, noise-equivalent
differences (
) required to resolve 10% concentration changes in water constituents, and for selected dark and bright water types the corresponding radiances (
), noise-equivalent radiance differences (
) and SNRs at the top of the atmosphere for sun zenith angles of 10° and 70° and horizontal visibilities of 10 and 80 km. To support a multispectral sensor design, a wavelength table extending the International Ocean-Colour Coordinating Group IOCCG recommendations for ocean color sensors [
8] was derived.
Since the CEOS report was not subject to peer review and the simulated spectra are not publicly available, the authors were repeatedly asked for a citable documentation of the methods and results of the sensitivity analysis and for access to the software and the complete simulation dataset. For this reason, we repeated all simulations and statistical analyses with slightly updated settings for the scenarios, improved approaches for simulating radiometric sensor (
) and measurement (SNR) requirements and extended statistical analysis of the simulated spectra. A method was developed for parameterizing the SNR in terms of
,
and atmospheric path radiance and for separating the SNR contributions from the ground and the atmosphere. This parameterization, which, to our knowledge, has not been described in the literature before, allowed us to specify the measurement requirements more systematically compared to the CEOS report. The updated scenarios, methods and simulations, their statistical analysis and the derived measurement and sensor requirements are described in this paper. The software used to perform the simulations and the full dataset of simulated spectra are available online [
9] (
Supplementary Materials,
https://doi.org/10.5281/zenodo.3817616).
This paper focuses on an aspect which, as far as we know, has not been performed systematically before: to approach the required reflectance and radiance sensitivities using thorough physics-based simulation for actually measured concentration ranges and optical properties from representative water bodies, as well as actual measured benthic substratum spectra. The described methods and results are generic in nature and thus may provide sensor engineers and scientists with information to design Earth observation sensors and juxtapose what is technologically feasible with what is scientifically desirable.
2. Materials and Methods
The derivation of widely applicable measurement requirements follows the following concept. First, a number of scenarios are defined to represent the variability of the optical properties for typical and extreme lakes on Earth (
Section 2.1). The optical variability within each scenario is mainly determined by the concentration changes in phytoplankton, CDOM and non-algal particles, by the variability of the spectral slope of CDOM absorption in the case of optically deep water and by water depth and bottom substratum types in the case of optically shallow water. An analytical model is used for simulating a large number of remote sensing reflectance spectra for different values of the variable parameters within the scenario-specific ranges. This model is described in
Section 2.2. The set of simulated spectra is subsequently analyzed to determine the optimal spectral and radiometric resolution of measurements. The methods for deriving these measurement requirements are described in
Section 2.3 (optimal spectral resolution) and
Section 2.4 (optimal radiometric sensitivity).
2.1. Scenarios
The inland and coastal waters on Earth are as variable as their surrounding ecosystems and catchment areas. Water constituents differ considerably in type, concentration and thus optical properties. The various sources of organic and inorganic material make the reflectance spectra more variable than for the open ocean. When the bottom is visible at the surface in shallow waters, the reflectance spectrum is affected by the optical properties of the substratum (the inanimate bottom material), as well as the benthos (the living organisms on the substratum). These waters are called optically shallow waters, as opposed to the optically deep waters, where the radiance or reflectance signal measured at the surface comes from backscattering and fluorescence in the water column. To study the variability of reflectance, we used two scenarios: one representing values of optically active water quality components (OACs) that can be considered as typical for inland and coastal waters and one considering extremely high levels of OACs, representing extreme aquatic ecosystem conditions. Each scenario is defined by a set of measurable quantities, which are related to the spectral variability of reflectance, and by their minimum, maximum and typical values.
Remote sensing groups the OACs into three main classes: phytoplankton, non-algal particles (NAP) and colored dissolved organic matter (CDOM) [
2]. NAP consists of varying ratios of organic to mineral matter. Optical properties that are independent of the illumination, such as the absorption coefficient and the backscattering coefficient, are called IOPs (inherent optical properties) or SIOPs (specific inherent optical properties) when normalized to concentration or, in the case of CDOM, normalized to the absorption value of 440 nm. These wavelength-dependent functions, together with the concentrations, allow the simulation of the reflectance of the water body. In the case of optically shallow waters, additionally, the spectral irradiance reflectance (or albedo) of the bottom substrates and benthos are required for simulating the combined reflectance, including the attenuated and backscattered light in the water column.
2.1.1. Optically Deep Water
The wavelength-independent parameters defining an optically deep water scenario are the concentrations of phytoplankton (C), NAP (X) and CDOM (Y). Additionally, the spectral slope of CDOM absorption (S) is used to model the natural variability of the spectral shape of CDOM absorption. The wavelength-dependent optical properties are the SIOPs of phytoplankton and NAP. The relationship of these parameters and SIOPs to the reflectance of water is outlined in
Section 2.2.
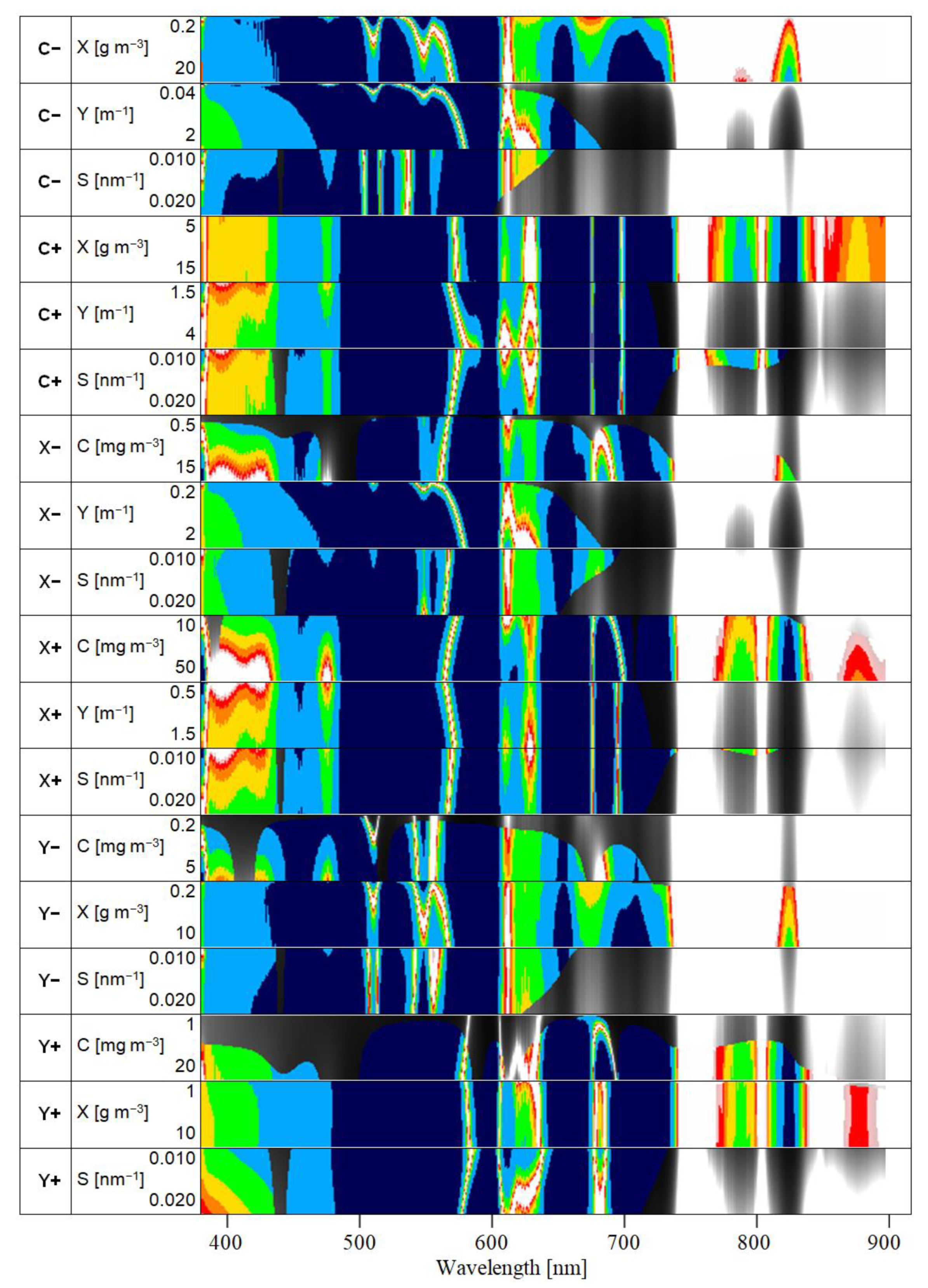
As the concentrations of water constituents are not completely independent from each other, the definition of scenarios is oriented toward certain types of lakes. Scenarios for typical lakes are defined in
Table 1, based on actual measured values. They are specified in terms of a typical value and a representative range of C, X, Y and S. The simulations vary C, X, Y and S across the scenario-specific ranges and keep the SIOPs constant. These results are also valid for most coastal waters, as coastal waters tend to have ranges of concentrations that fall within the inland water ranges.
The concentrations and ranges for scenarios C−, Y− and Y+ are based on Table 1 in [
10,
11], scenario X+ on lakes in The Netherlands [
12] and scenario C+ on the two Finnish lakes, Tuusulanjärvi and Hiidenvesi [
13]. S is in most cases between 0.010 nm
−1 for humic acid dominated waters and 0.020 nm
−1 when fulvic acids prevail, with a value of 0.014 nm
−1 being representative of a great variety of water types [
14,
15].
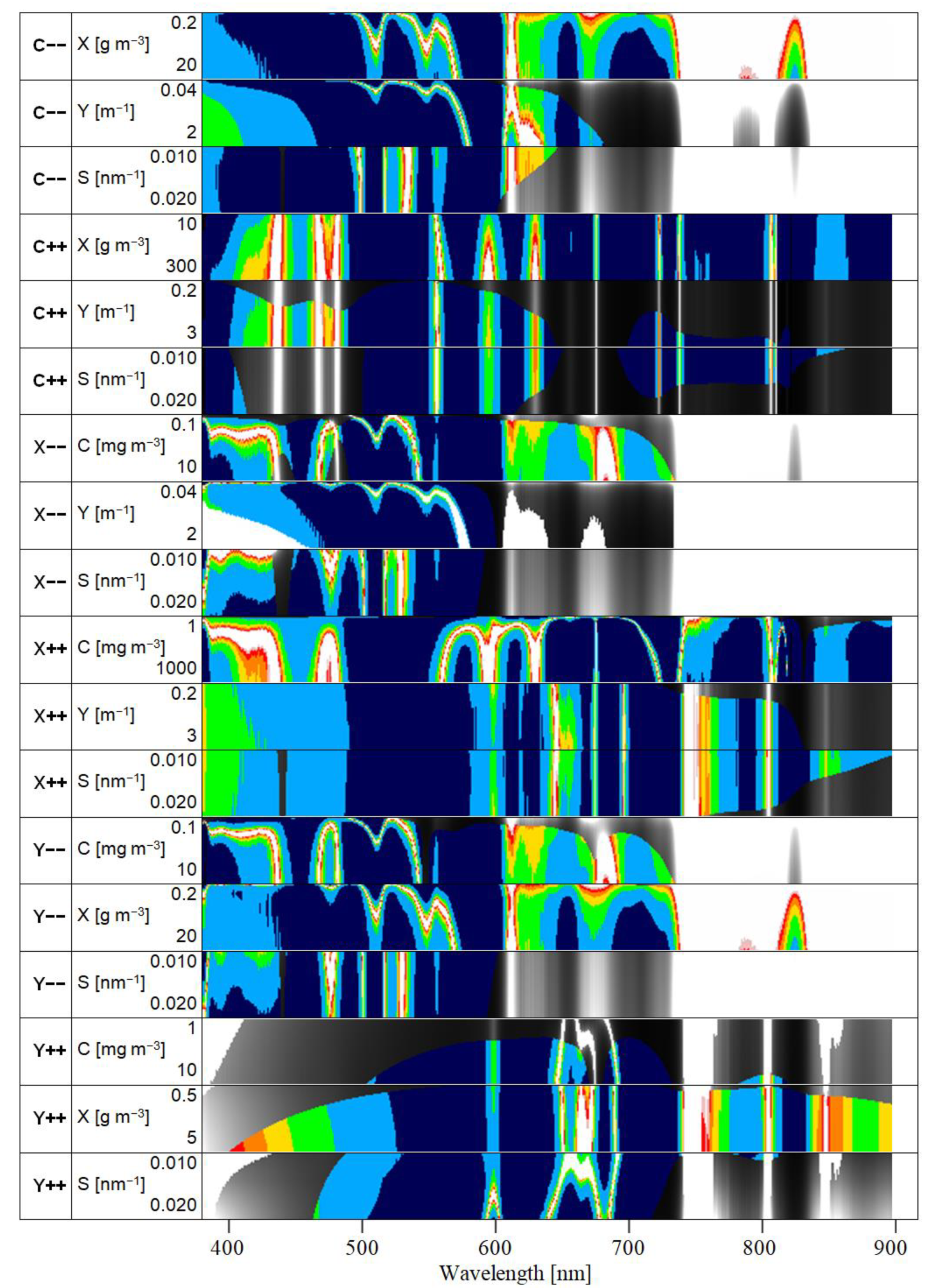
Of particular relevance for defining measurement requirements are the extreme cases: if a sensor is suitable for the extremes, it should provide even better data in-between. This concept of extremes defines the scenarios of, based on actual measured values (
Table 2). The extreme concentrations of C, X and Y are chosen close to a minimum or maximum of Table 1 in [
11].
2.1.2. Optically Shallow Water
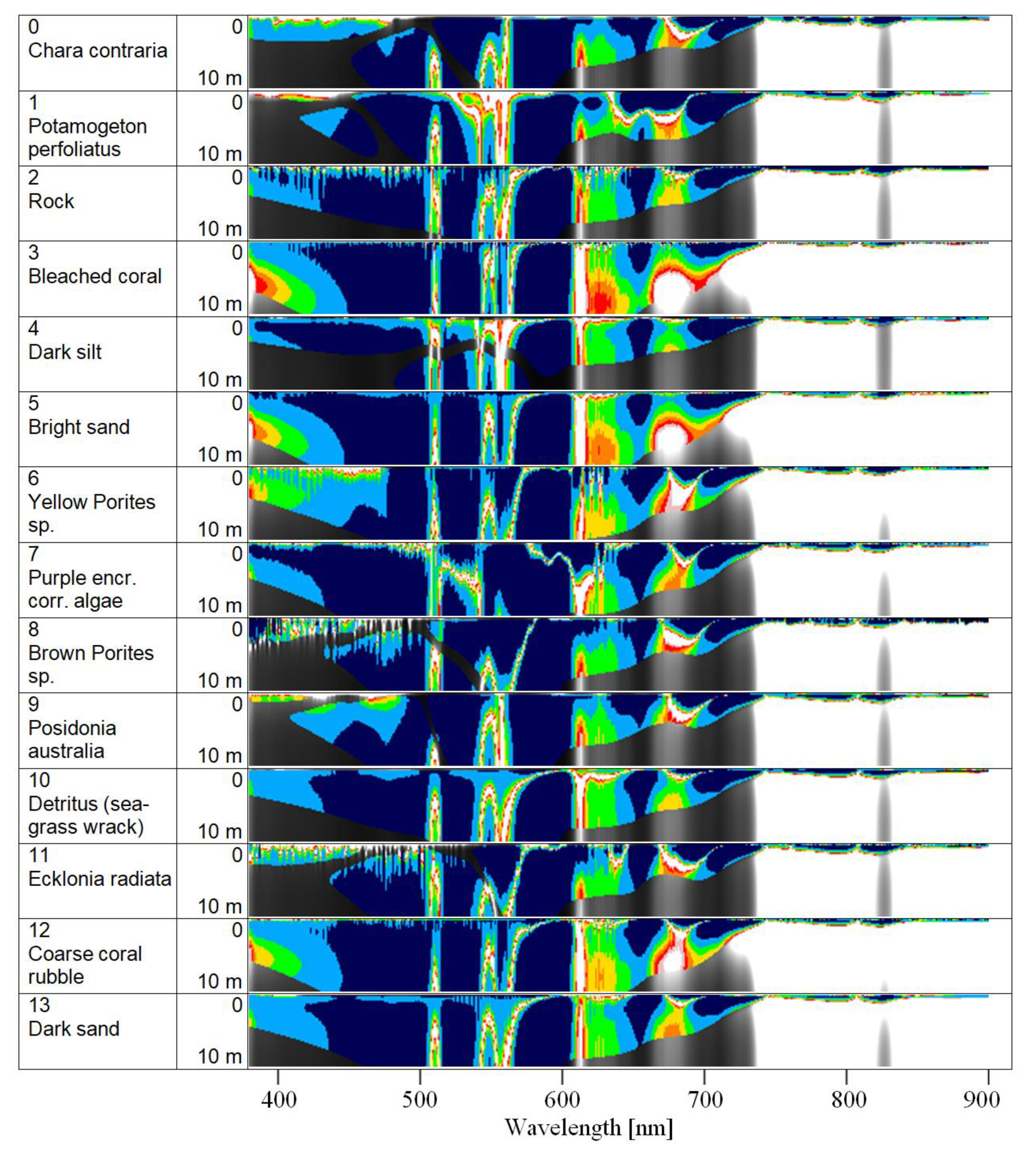
The simulations for optically shallow waters alter the bottom substrate or benthos type and water depth, and they keep the parameters of the water column constant. As remote sensing of optically shallow waters favors clear water conditions, the typical concentrations of scenario Y− (C = 1 mg m−3, X = 1 g m−3, Y = 0.2 m−1) are used to specify the water layer. These concentrations are close to the lower end for the standard scenarios; hence, the water is clear for inland waters compared to most other optically deep water scenarios. For coastal waters, these low concentration values are more representative of an average coastal water.
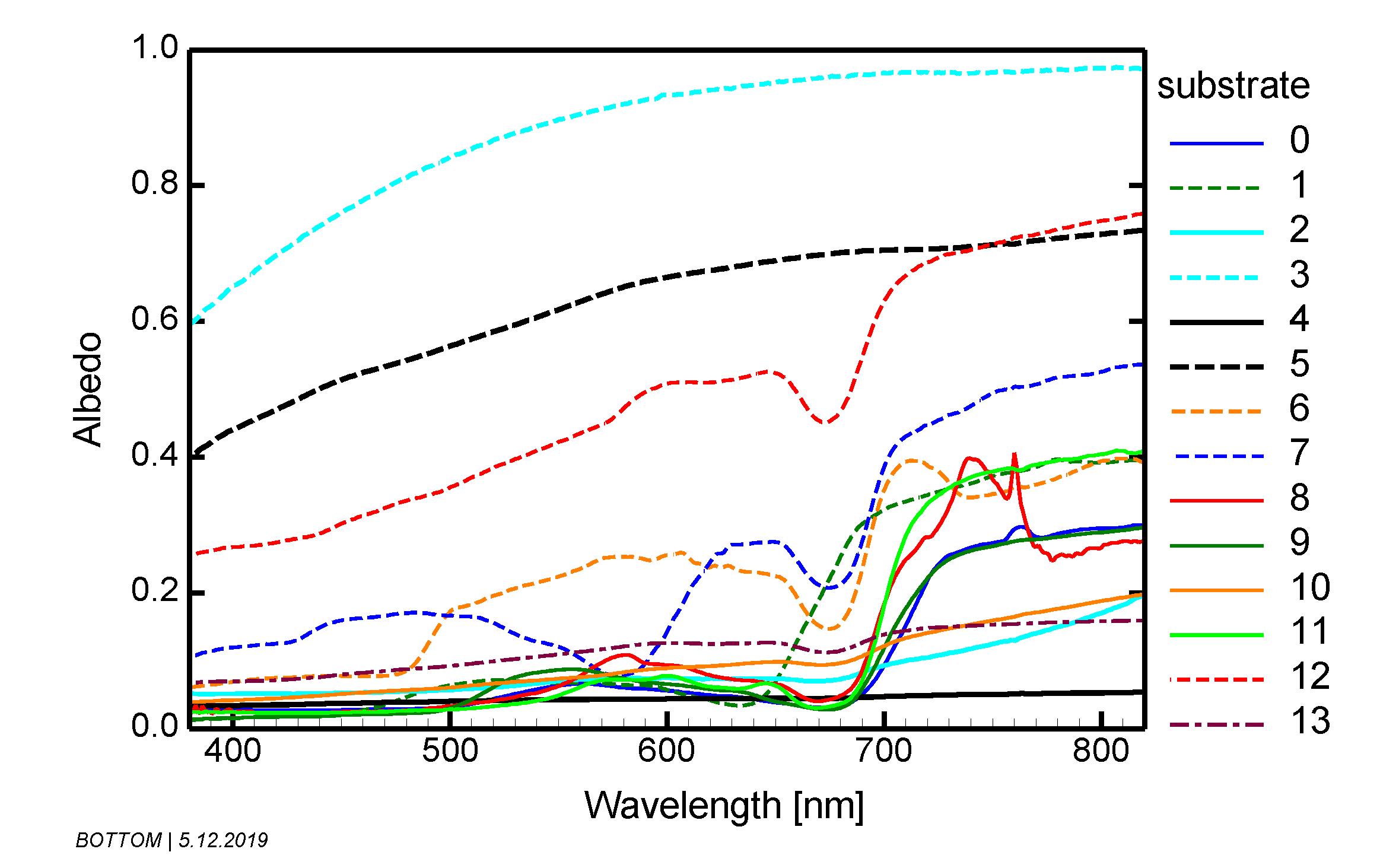
The optical properties of the optically shallow water scenarios are defined by the spectral albedo of the bottom substrates and benthos. Fourteen substrate and benthos types are selected for approximating the natural variability of the water body’s bottom reflective properties (
Table 3,
Figure 1):
Substrates 0 and 1 were measured in Lake Constance, Germany [
16], substrates 2 to 12 in the tropical Lihou Reef National Marine Park and subtropical Lord Howe Island Marine Parks, Australia [
17,
18,
19] and substrate 13 in the Baltic Sea, Germany [
20]. The albedo spectra of these substrates were used as input for the simulations in optically shallow waters.
2.2. Model
The reflectance of water depends on the spectral absorption coefficient,
, and spectral backscattering coefficient,
, of the water layer. The most relevant components contributing to
and
are pure water (index “W”), phytoplankton (index “phy”), non-algal particles (index “NAP”) and CDOM. Their absorption and backscattering coefficients are additive:
is the phytoplankton concentration in units of mg m
−3 of chlorophyll-a,
is the total suspended matter concentration in units of g m
−3 and
is the CDOM absorption at 440 nm in units of m
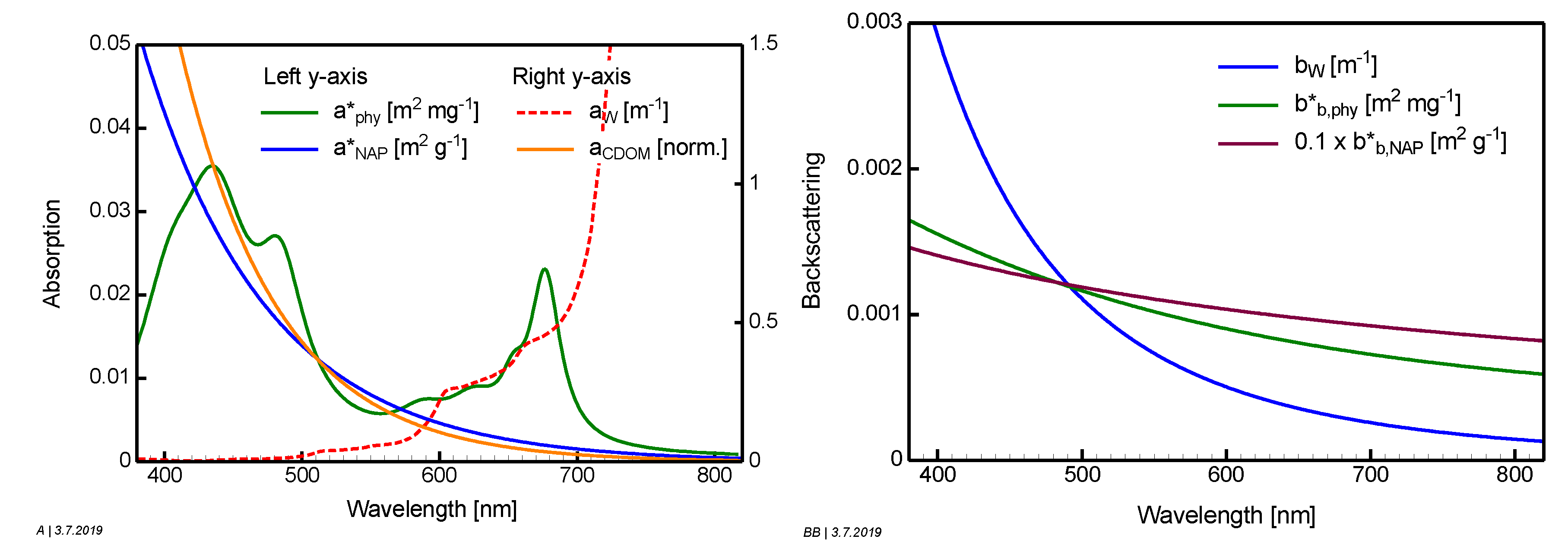
−1. While these wavelength-independent parameters are used to model the concentrations of the water constituents, their optical properties are simulated using the wavelength-dependent SIOPs shown in
Figure 2. The specific absorption coefficients of phytoplankton (
) and non-algal particles (
) and the specific backscattering coefficient of phytoplankton (
) are taken from measurements, while CDOM absorption and NAP backscattering are approximated using analytical equations. The parameters of these empirical equations are
S, the spectral slope of CDOM absorption in units of nm
−1,
, the Angström exponent of NAP backscattering and
, the specific backscattering coefficient of NAP at 555 nm in units of m
2 g
−1.
All calculations simulate measurements of remote sensing reflectance
, which is the ratio of upwelling radiance to downwelling irradiance, both above the water surface and excluding specular reflections at the surface.
is related to the corresponding underwater ratio
as follows [
21,
22]:
0.52 is the water-to-air radiance divergence factor, and the denominator with
1.6 accounts for the effects of internal reflection from water to air. The model of Albert [
23,
24] is used for the simulations, which expresses
as a polynomial of fourth order of the IOP.
The model can be used for optically deep and shallow waters and accounts for the sun zenith angle and the viewing angle. Its coefficients have been derived using Hydrolight [
21] simulations, covering wide ranges of environmental parameters, including all concentrations of the standard scenarios and most of the high concentrations of the extreme scenarios. A similar model has been developed by Lee et al. [
22,
25] for narrower ranges; see [
26] for a comparison of the equations and parameter ranges. The following is Albert’s equation for optically deep water:
and the following is the equation for optically shallow water:
is the sun zenith angle in water,
the viewing zenith angle in water,
the wind speed in units of (m s
−1),
the diffuse attenuation coefficient of downwelling irradiance,
the attenuation coefficient for upwelling radiance originating from the water layer,
the attenuation coefficient for upwelling radiance from the bottom,
the bottom substrate albedo (irradiance reflectance) and
and
are empirical coefficients close to one. For the equations of the attenuation coefficients
,
and
, see [
23,
24].
The SIOPs are chosen as follows (see
Figure 2):
is the specific absorption coefficient of green algae from the database of the software WASI [
27]. It is based on an absorption measurement of the green algae
Mougeotia sp., grown as pure culture in the laboratory [
28], which was later fitted for extension to the near infrared and rescaled to 0.023 m
2 mg
−1 at 674 nm to match field measurements from two German lakes [
29].
is approximated by an exponential equation with slope
SNAP = 0.011 nm
−1 [
30] and the specific absorption coefficient of 0.027 m
2 g
−1 at 440 nm [
31].
is the specific backscattering coefficient from normal clear water in Lake Garda, dominated by green algae (provided by C. Giardino, personal communication).
(555) = 0.011 m
2 g
−1 and
= 0.75 were calculated by averaging measurements from lakes in Italy, Estonia, the Netherlands and Finland using Table 3 of [
32].
Some of the simulations of optically shallow waters represent saltwater environments such as seagrasses, macro-algae and coral reefs. Nevertheless, we used mostly freshwater SIOPs. As the optically shallow water simulations were carried out with low concentrations of OACs (scenario Y−: = 1 mg m−3, = 1 g m−3, = 0.2 m−1), the effect on the results of not choosing an additional set of saltwater SIOPs is considered to be minimal.
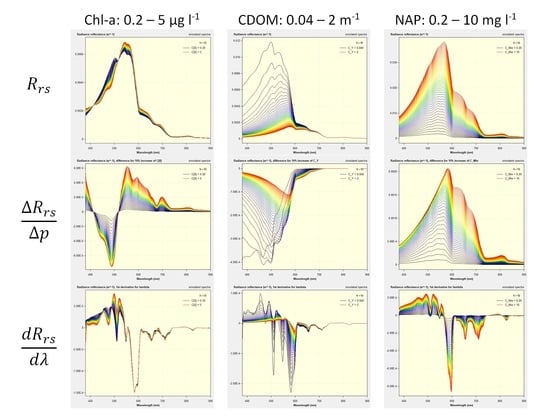
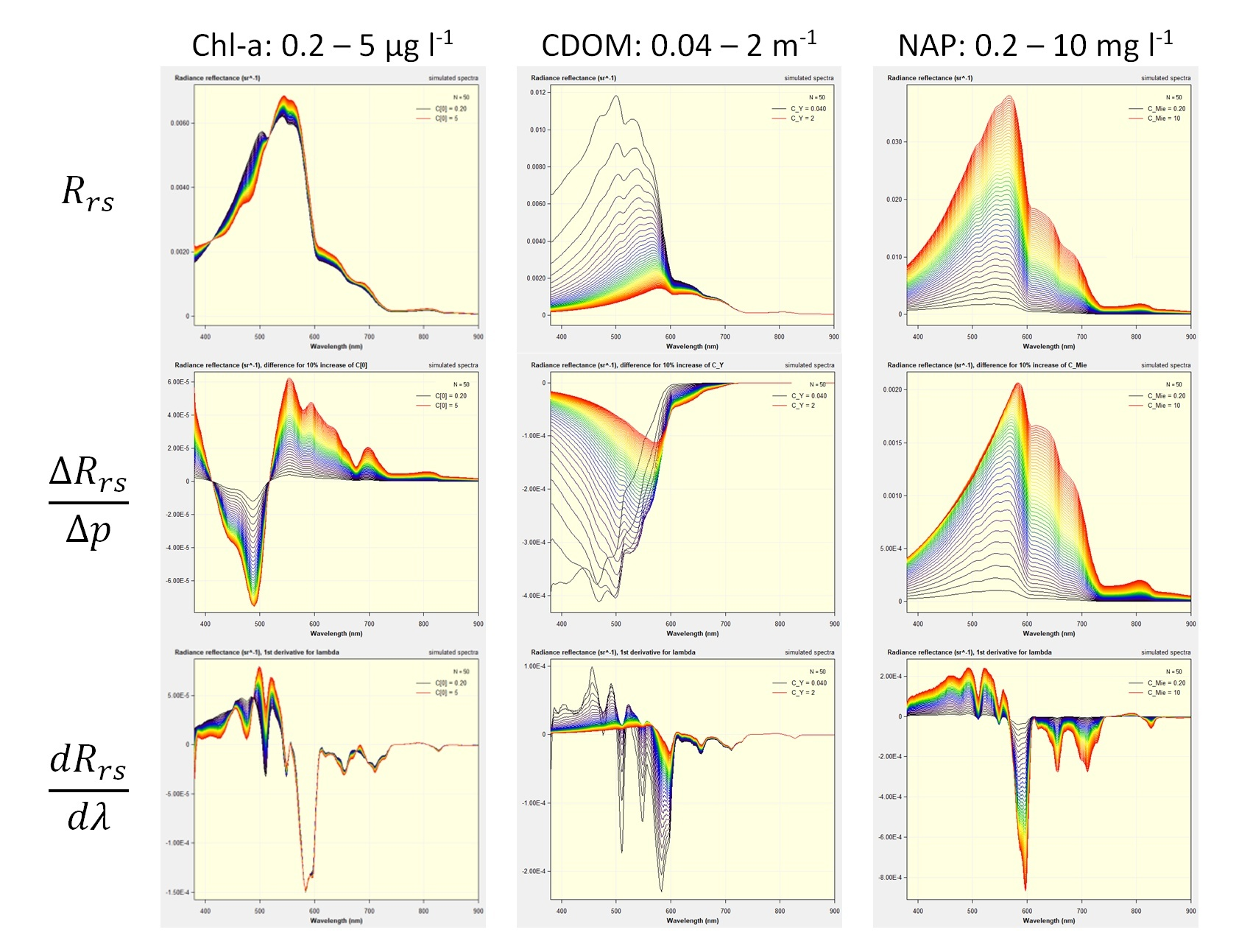
2.3. Determination of the Optimal Spectral Resolution
To capture the information content of a reflectance spectrum, a measurement must resolve the spectral features of the spectrum, particularly the peaks, dips and shoulders. These changes in steepness are given by the first derivative
. It can be measured by a real sensor only approximately, depending on the measurement’s quantization
and the sensor’s spectral resolution
:
/
≈
. For given
, the ideal spectral resolution is thus:
At wavelength regions of large reflectance changes, the spectrum must be sampled more frequently than at regions of small gradients, hence is inversely related to . To minimize artifacts introduced by sensor or model noise at spectral regions where the reflectance spectrum is flat or has minima or maxima, = 20 nm is set for < 10−6 sr−1 nm−1. Equation (7) defines the optimal spectral resolution for a measurement with a noise-equivalent reflectance of . Equation (8) is used for because it addresses the resolution of the spectral shape of a measurement.
2.4. Determination of the Optimal Radiometric Sensitivity
2.4.1. Rrs. Quantization
The quantization is defined in this study as the smallest difference of remote sensing reflectance that can be resolved by a measurement. As it is determined by the noise of a measurement, is also called noise-equivalent remote sensing reflectance difference. It should not be confused with the radiometric resolution of a sensor, which is always in energy units (e.g., photons, radiance). The required resolution is derived using two approaches. Both approaches are applied to all spectra simulated for all deep water scenarios.
The first approach addresses the measurement of remote sensing reflectance spectra for determining the absolute values of environmental parameters from a spectral analysis of
. It is based on the postulation that the dynamics of a spectrum
should be sampled at a typical resolution of 1%. Hence, the noise-equivalent remote sensing reflectance difference of this approach,
, is calculated as 1% of the difference between the reflectance maximum,
, and the reflectance minimum,
:
The subscript “1” refers to approach number 1. The wavelength interval from 400 to 800 nm is taken to determine the wavelengths and of maximum and minimum reflectance.
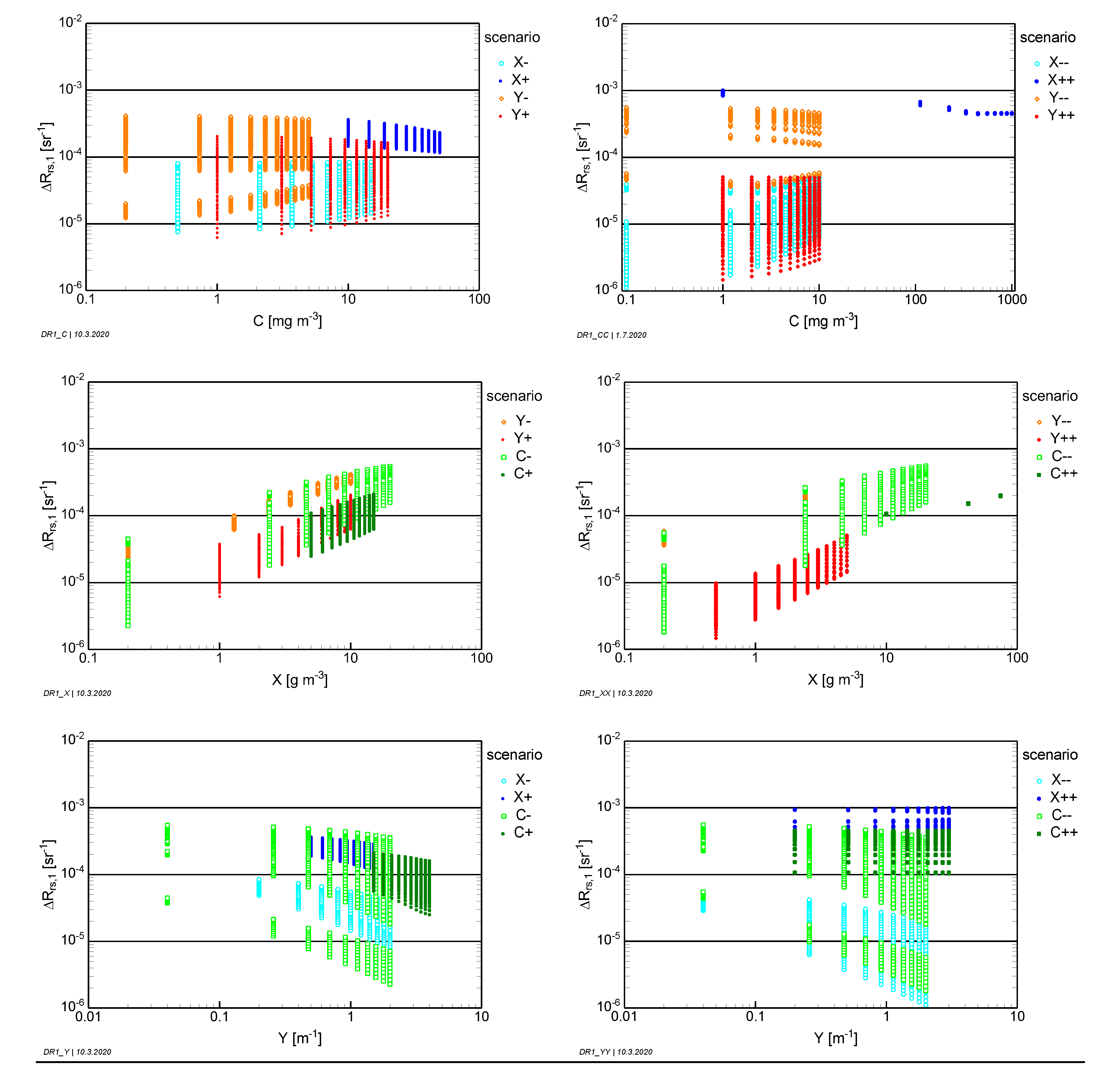
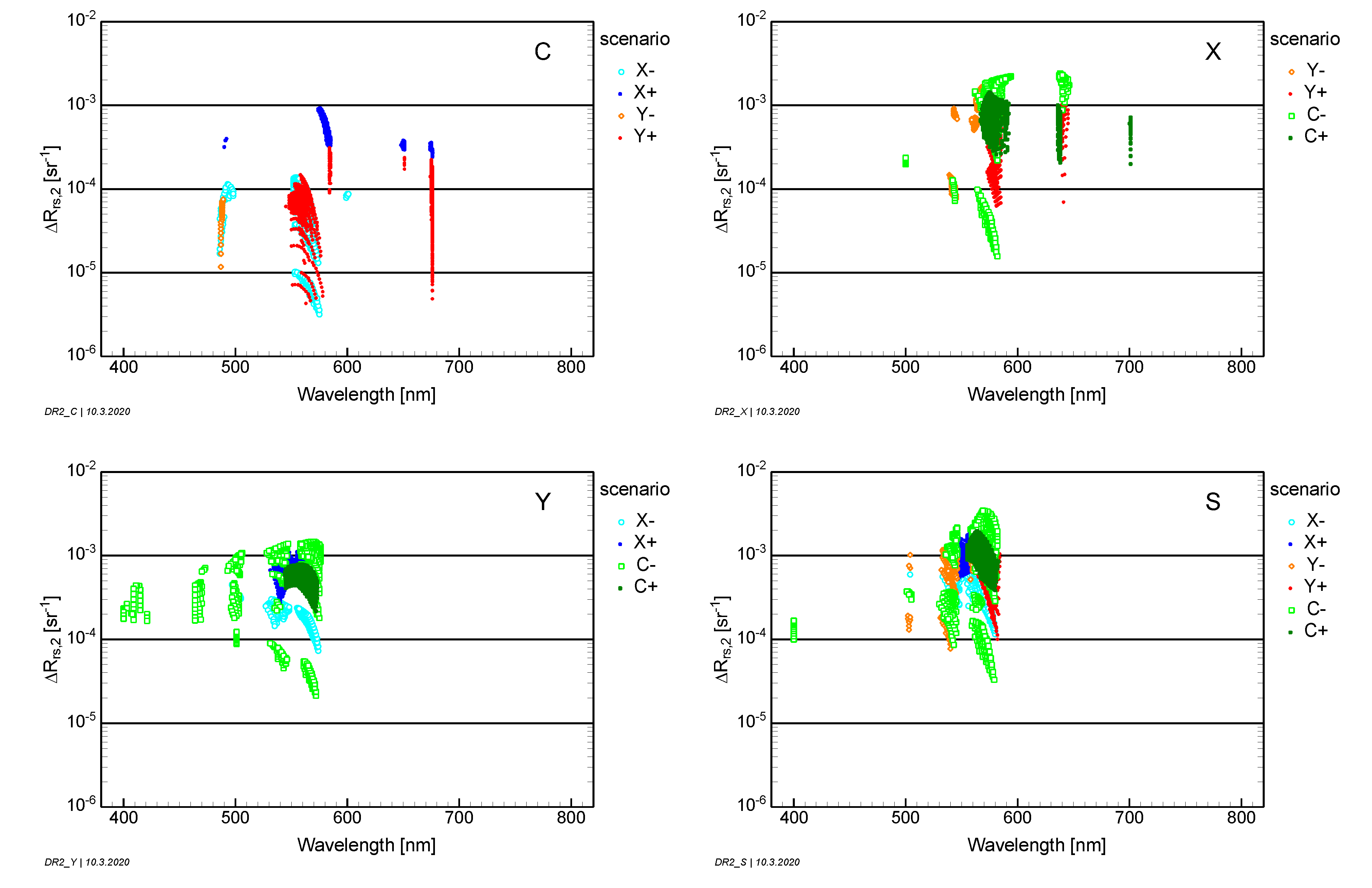
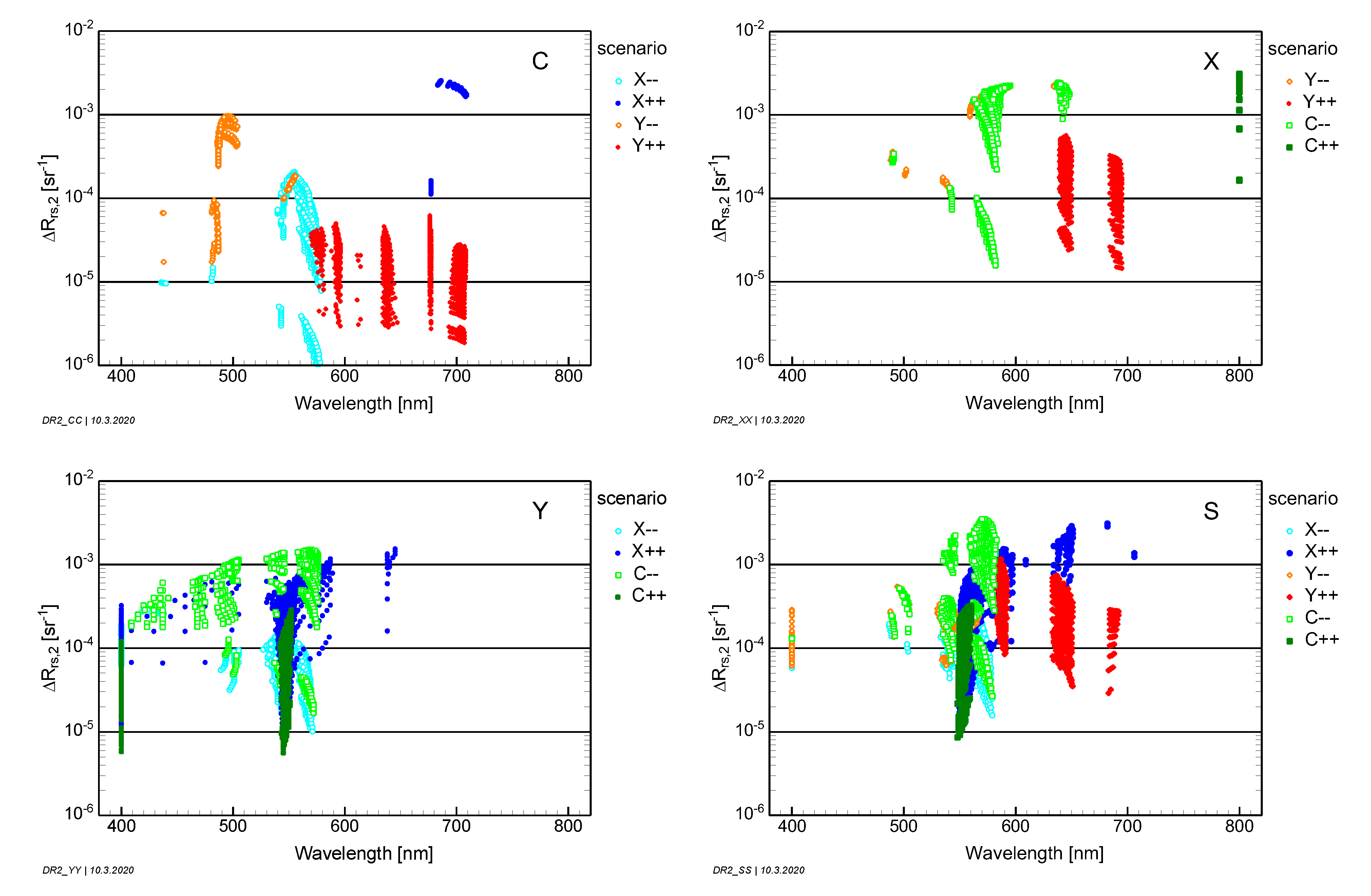
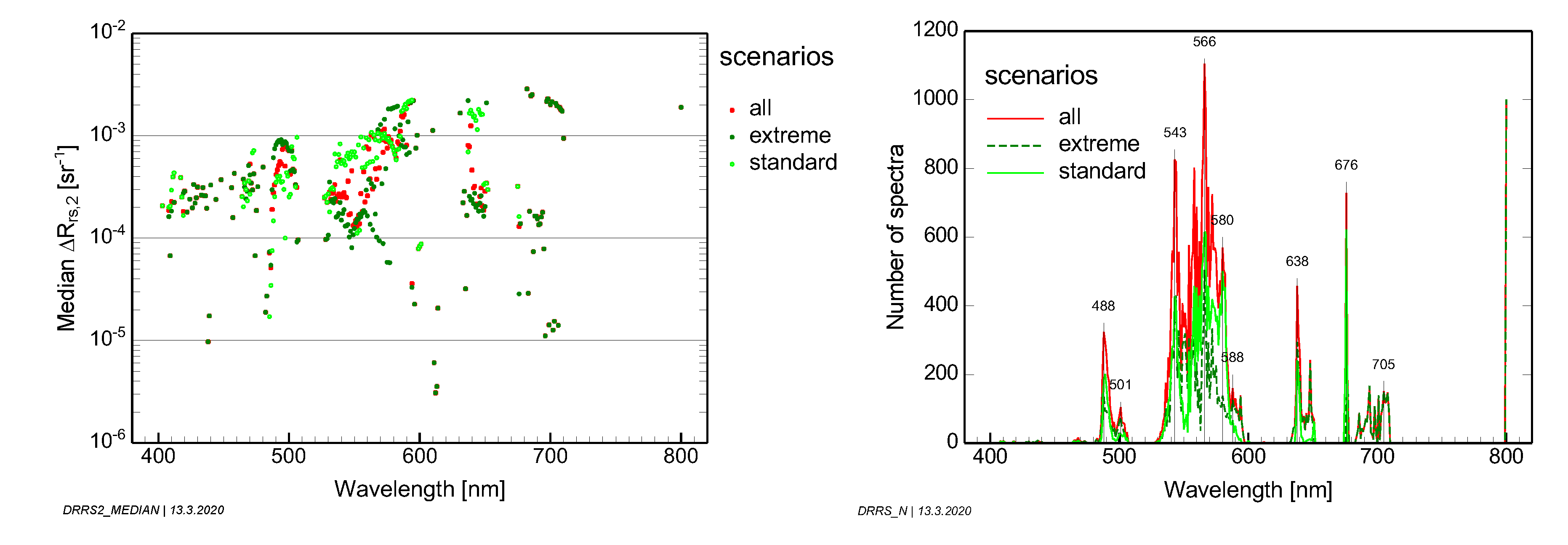
The second approach addresses the measurement of
differences for quantifying changes in environmental parameters. It is oriented on the postulation that a measurement should be sensitive to changes in the parameter of interest (
x) in the order of 10%. It first determines the wavelength
which is most sensitive to reflectance changes induced by
x. The remote sensing reflectance difference at
, induced by a 10% change in
x, is then taken to define the noise-equivalent remote sensing difference:
The subscript “2” refers to approach number 2.
2.4.2. Absolute Radiometric Resolution
The study simulates measurements in units of remote sensing reflectance (
), which is independent of light intensity and thus not suitable for assessing the capability of radiance sensors for resolving the spectral shape of
or detecting
differences induced by changes in optically active environmental parameters. Relative
units are converted to absolute radiance (
) units by multiplying
with the illumination of the target in terms of downwelling irradiance
:
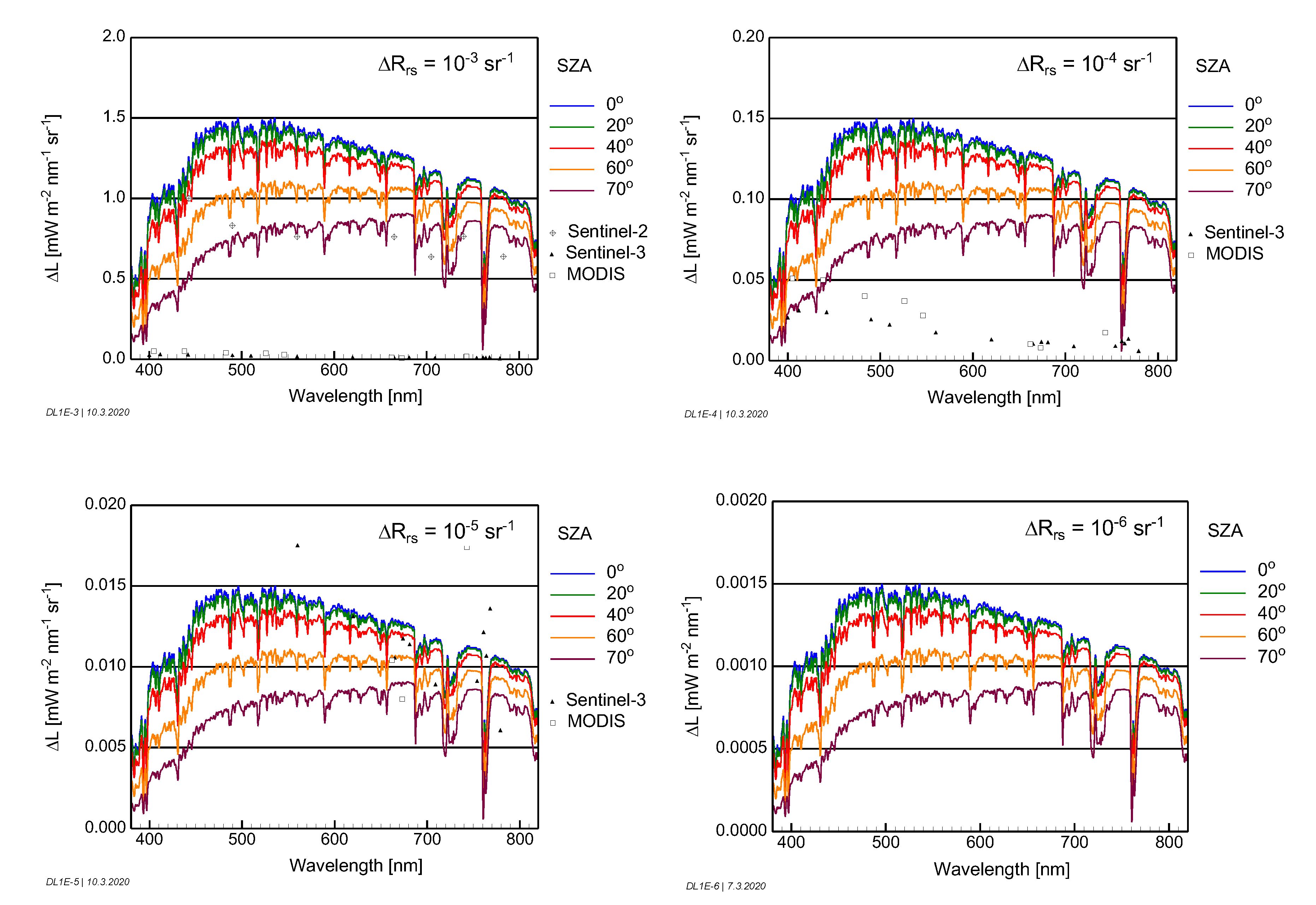
Similarly, the radiance difference
induced by a remote sensing reflectance difference of
is given by:
To estimate radiometric sensor requirements, the illumination
is simulated for sun zenith angles of 0°, 20°, 40°, 60° and 70°, using MODTRAN-6 [
33]. Radiance differences
are calculated using Equation (11) for
values of 10
−3, 10
−4, 10
−5 and 10
−6 sr
−1.
2.4.3. Signal-to-Noise Ratio
The signal-to-noise ratio,
specifies the sensor-induced noise for measuring a radiance spectrum
.
is the radiance corresponding to the radiometric sensitivity of a sensor. It is important to note that
is a sensor parameter, while
is a measurement parameter, as it depends on the measured radiance, i.e., on the illumination and reflectance of the target (Equation (10)). If real measurements are used to compare sensors rather than laboratory-based
data, the
s derived from the measurements have to be converted to a common reference spectrum
[
34]. This is however only an approximate sensor comparison because the
derived from measurements further depends on photon noise and on the
variability of the averaged measurements.
Over water, most of the upwelling radiance at the top of the atmosphere (TOA) originates from the atmosphere, thus the
at TOA is governed by the radiance contribution from the atmosphere, called path radiance
. The TOA radiance is related to
and
as follows:
is the transmission of the atmosphere for the upwelling radiance and
is the downwelling irradiance at the bottom of the atmosphere (BOA). A
difference of
induces a radiance difference at TOA of
To resolve this difference, a sensor on a satellite must have a noise-equivalent radiance of
For the minimum requirement of
, a measurement has a signal-to-noise ratio of
This means that the SNR at TOA is the sum of two components, the one related to the path radiance and the other to the remote sensing reflectance at BOA:
with
and
Equation (17) expresses a measurement requirement for the path radiance: the required is inversely proportional to the difference to be resolved.
4. Summary and Conclusions
The main goal of the paper was to derive globally applicable requirements for measuring remote sensing reflectance (
) in terms of quantization (
) and spectral resolution (
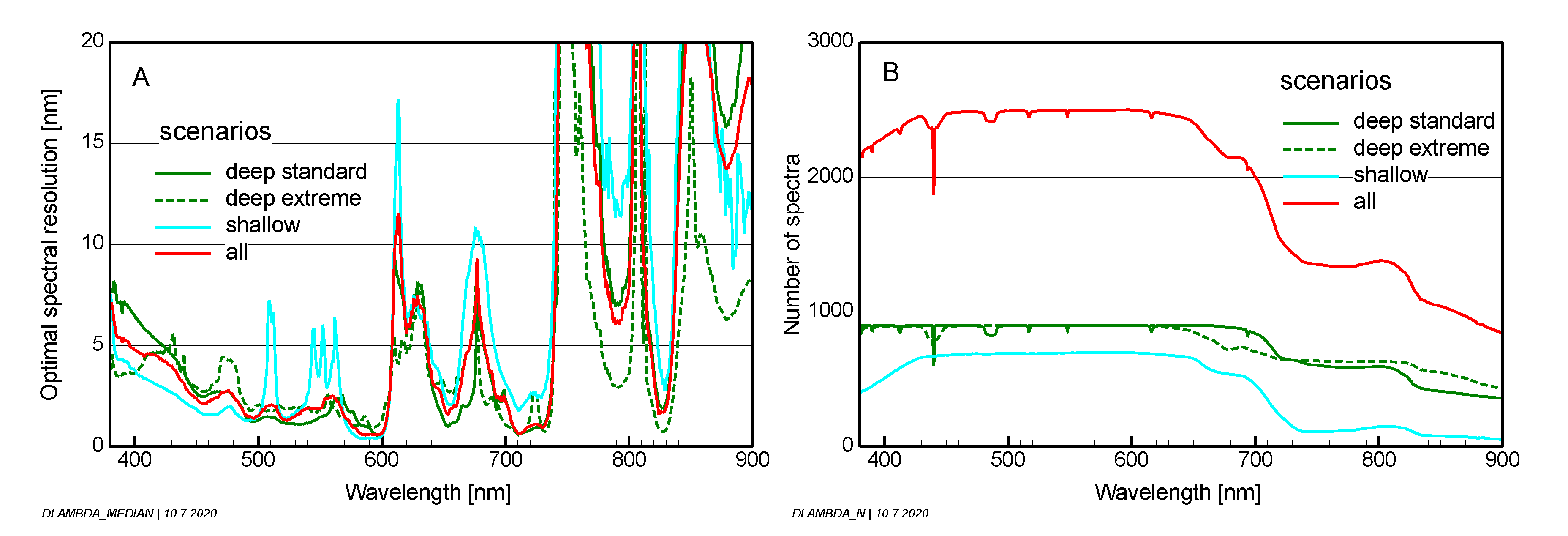
). A number of scenarios for optically deep and optically shallow waters were defined, which are expected to cover most of the variety of reflectance spectra of inland and shallow coastal and coral reef waters on Earth. Each optically deep water scenario is represented by the range and typical values of four parameters characterizing the water constituents, while each optically shallow water scenario is defined by the albedo of the bottom substrate or substratum cover type and by a set of water depths. Thousands of reflectance spectra were simulated for each scenario by iterating the scenario-specific parameters. A method was developed (Equation (7)) for deriving the spectral resolution, which captures all spectral details present in
for a given quantization
.
was derived using two approaches: (1) the spectral shape of
Rrs should be resolvable with a quantization of 100 levels from 400 to 800 nm; (2) concentration changes in water constituents of 10%, spectral slope differences of 0.002 nm
−1 of CDOM absorption and depth differences of 20 cm shall produce measurable reflectance differences for at least one wavelength. The results of
and
are presented in much detail in
Section 3.1 and
Section 3.2. Both parameters change significantly at around 740 nm. From 400 to 735 nm, the medians are
= 1.2 × 10
−4 sr
−1 and
= 2.9 nm; the 90% percentiles are
= 1.0 × 10
−5 sr
−1 and
= 1.2 nm. From 740 to 900 nm, the corresponding values are
= 1.5 × 10
−5 sr
−1 and
= 13.8 nm for the medians and
= 1.8 × 10
−6 sr
−1 and
= 2.3 nm for the 90% percentiles.
The secondary goal was to translate the
results to sensor and measurement requirements for radiance sensors. Radiometric sensor requirements are defined by the noise-equivalent radiance NEL. Radiance differences
, induced by reflectance differences of
, are used as proxies for NEL. Simulations of
were made for specific values of
as a function of the sun zenith angle for a mid-latitude summer atmosphere with 50 km visibility (
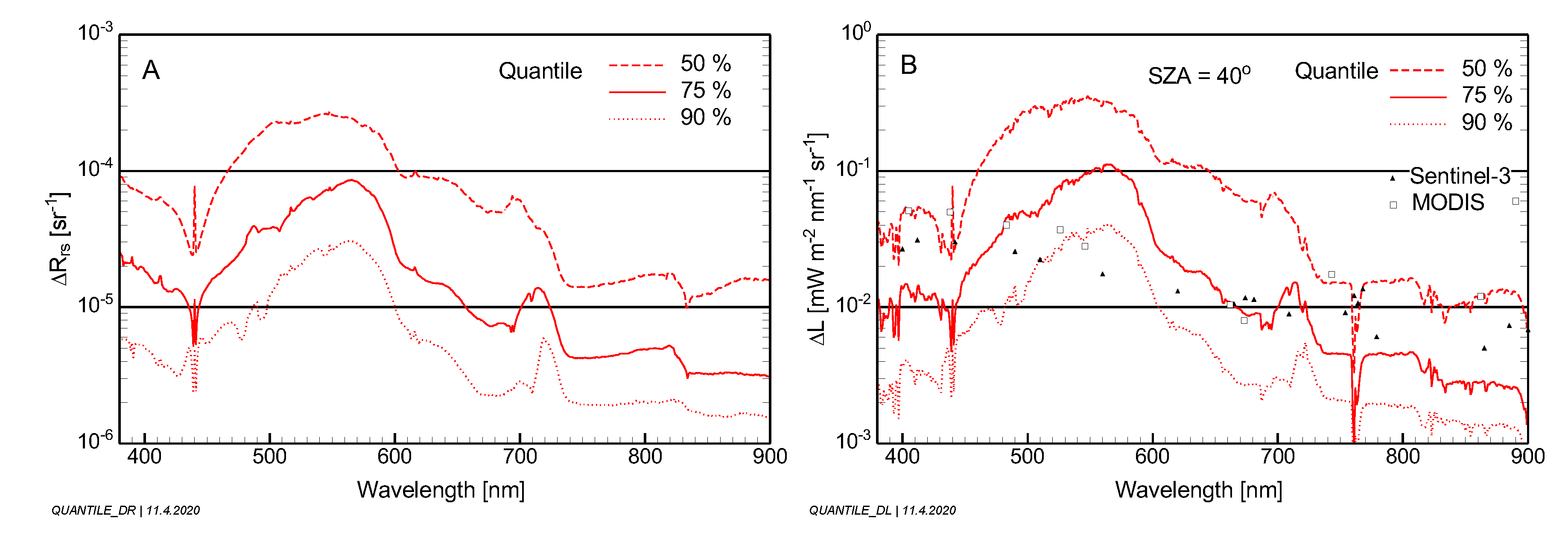
Figure 12). A statistical evaluation for all scenarios and a sun zenith angle of 40° is presented in
Figure 14. To make the results comparable with existing sensors, the derived requirements were compared with the specifications of OLCI on Sentinel-3 and MODIS. These sensors would be capable of capturing the radiometric details for ~50% of the studied scenarios in the blue, ~75–95% in the green, ~75% in the red and ~50–60% in the near infrared for the studied environmental conditions.
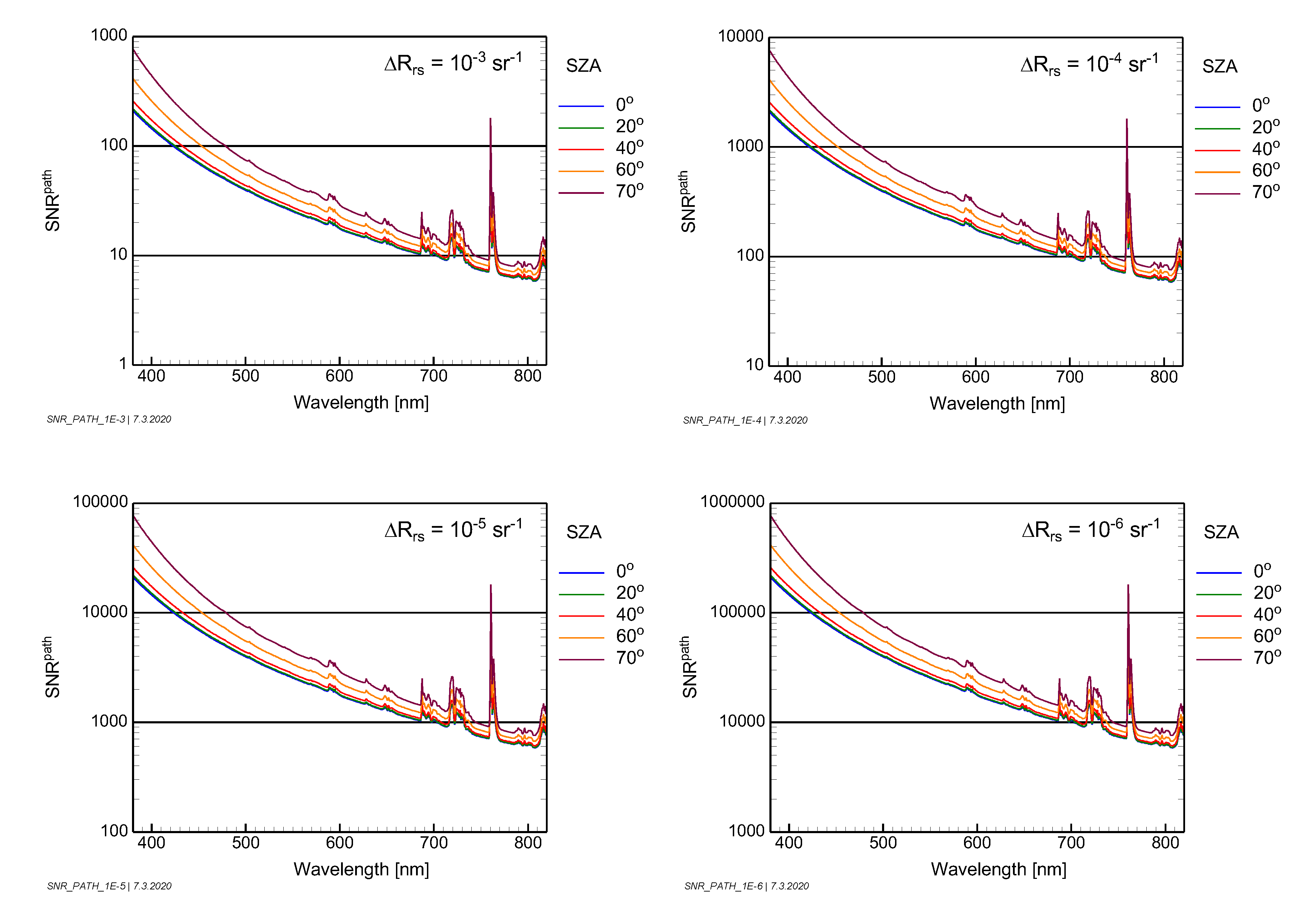
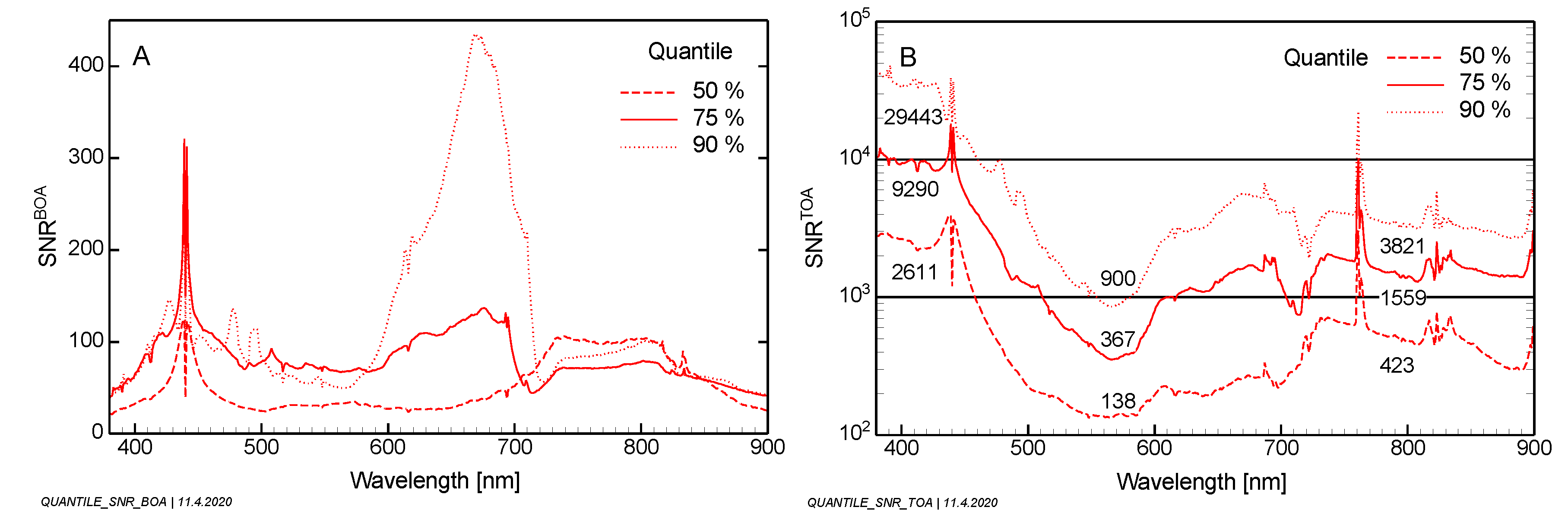
Radiometric measurement requirements are defined by the signal-to-noise ratio (SNR). Over water, the SNR at the top of the atmosphere is governed by the path radiance (
). Equations were derived for separating the contributions from the ground and the atmosphere (Equation (16)) and for expressing SNR in terms of
,
and
(Equations (17) and (18)). Simulations of typical atmospheric SNRs were made for specific values of
as a function of the sun zenith angle (
Figure 13). A statistical evaluation of all scenarios is presented in
Figure 15 for a sun zenith angle of 40°. It should be noted that the SNR is a popular parameter for comparing measurements but cannot be used directly for assessing a sensor because the SNR is not a sensor parameter.
Quantitative values of remote sensing reflectance differences () and optimal spectral resolution () were derived for tens of thousands of simulations, which are expected to cover a wide range of inland, coastal and reef waters on Earth. The simulations are based on the assumption that useful remote sensing reflectance () measurements shall be of very high quality in the sense that the spectral shape of should have a quantization of 100 levels, and the spectral resolution should allow the capture of all spectral details which are theoretically resolvable with that quantization. Measurements reaching the derived optimal values and hence represent a best case for subsequent data analysis but a worst case for sensor design.
The CEOS study [
1] investigated the technical constraints for an aquatic ecosystem Earth observation system and compared the SNRs at the top of the atmosphere resulting from the desired
values with realistically attainable SNRs for a sensor with a lens aperture of 30 cm and a ground sampling distance between 17 and 33 m in a 400 km orbit. Not surprisingly, they differ considerably, particularly for low sun elevation, turbid atmosphere and for retrieving phytoplankton in dark waters. It can be expected that even sensors at the technological front-end (highly sensitive and low-noise detectors with high dynamic range and large aperture of the telescope) are not able to measure data with such high quality under all circumstances. Hence, trade-offs between spatial, spectral and radiometric resolutions will be necessary to design a satellite sensor for inland and coastal waters. Simulations similar to those presented here can help to optimize these trade-offs. Such simulations should cover, in addition to representative aquatic scenarios like in this study, a reasonable range of atmospheric conditions and sun zenith angles.
To assess the capabilities of a specific sensor for deriving a parameter of interest (
), the sequence of steps must be reversed. The input are the sensor parameters (NEL, center wavelength and spectral response of each band, viewing angle), atmospheric conditions and the sun zenith angle. After the atmospheric transmission and the downwelling irradiance at the Earth’s surface have been calculated,
can be determined for each wavelength using Equation (14). To convert
into resolvable differences of
, partial derivatives must be calculated numerically or an iterative approach applied, since
and
cannot be expressed explicitly as a function of
. As
measurements in optically complex waters are frequently ambiguous [
36], the number and accuracy of retrievable parameters depends on the used algorithm and its strategy for handling ambiguities [
38]. The assessment of measurement capabilities should therefore also include retrieval algorithms.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}