On the Recursive Joint Position and Attitude Determination in Multi-Antenna GNSS Platforms





Abstract
:
1. Introduction
- (1)
- The GNSS carrier phase-based positioning and attitude models are revisited, and the connection to the JPA problem is formalized.
- (2)
- Application of Lie theory principles to the GNSS-based attitude problem (and consequently, also the JPA). Thus, the attitude is parametrized with the unit-quaternion, and a recursive solution based on an error state Kalman filter (ESKF) is formulated.
- (3)
- The performance of the proposed recursive solution for the JPA problem is addressed on a realistic signal-degraded scenario, and the comparison w.r.t separately solving the positioning and attitude problems (i.e., the standard solution) is analyzed.
2. Notation and Definitions
2.1. Notation
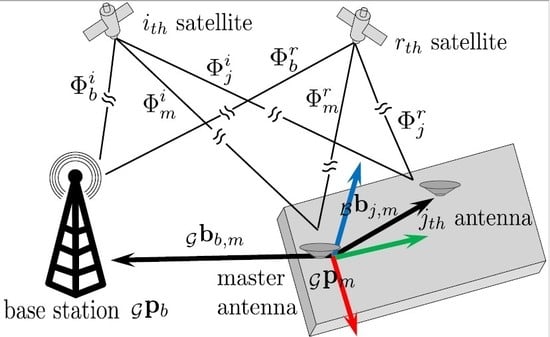
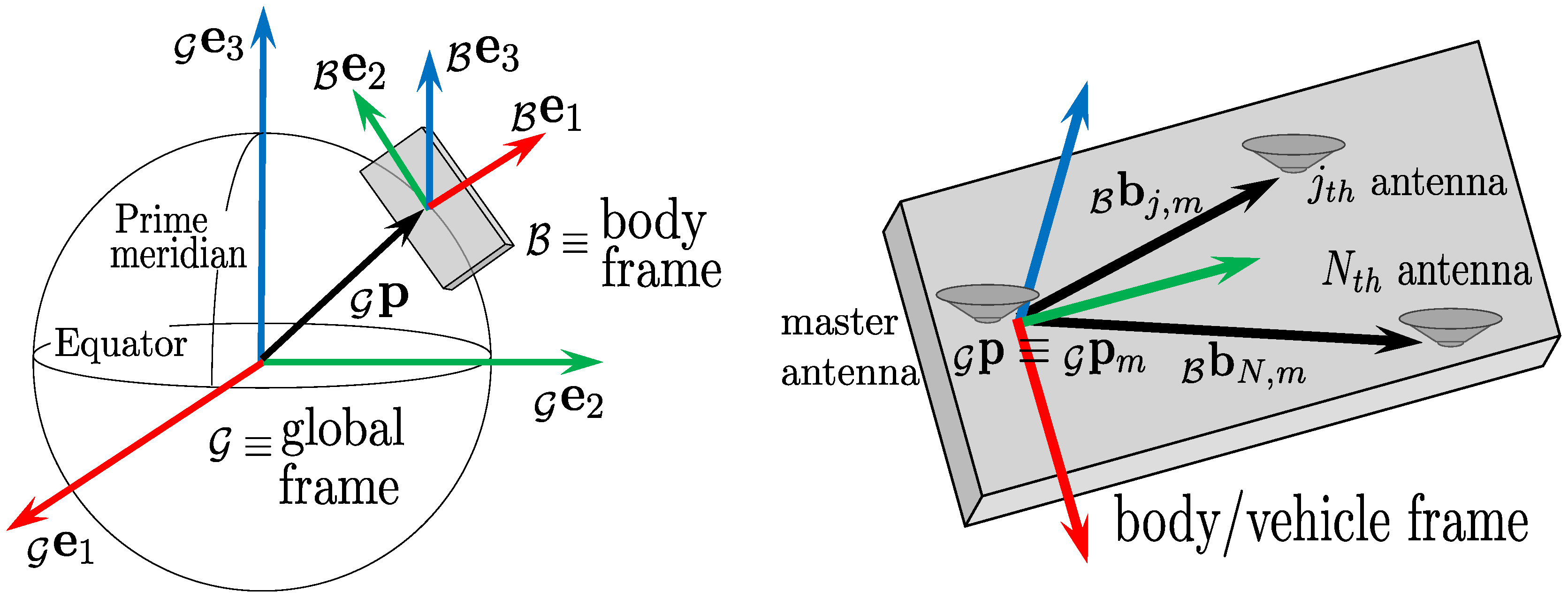
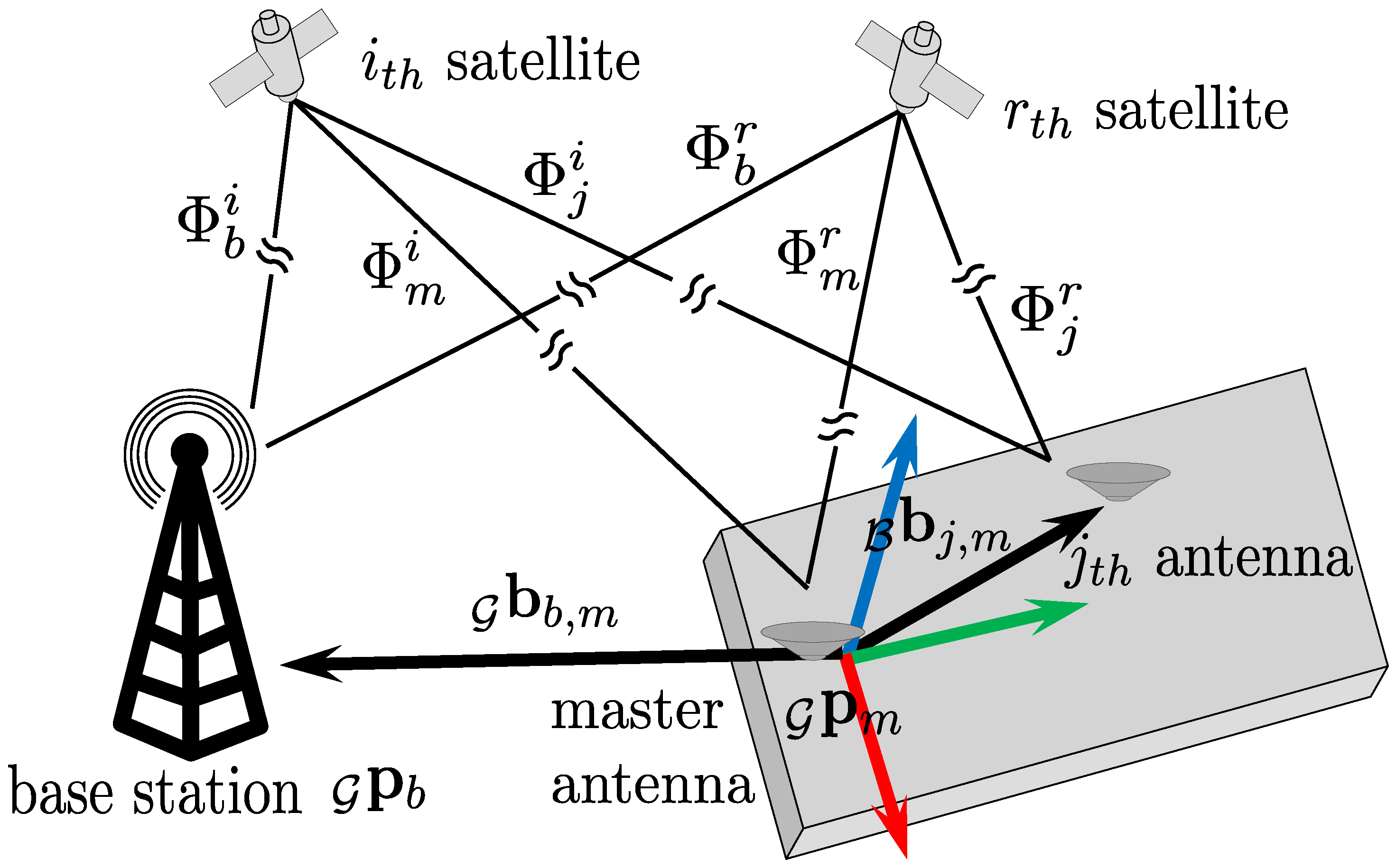
2.2. Coordinate Frames
2.3. State Definitions
3. GNSS Carrier Phase-Based Positioning and Attitude Observation Models
- are the code and phase observations (m),
- are the positions of the ith satellite and the jth antenna in the global frame,
- is the ionospheric error (m),
- is the tropospheric error (m),
- c is the speed of light (),
- are the satellite and receiver clock offsets (s),
- is the carrier phase wavelength (m),
- is the unknown number of cycles (i.e., in general being a real parameter due to the unknown initial phase at both the satellite and receiver antenna),
- are the remaining noise/unmodeled errors for code and phase observations, respectively.
3.1. RTK Positioning Model
3.2. Integer Ambiguity Resolution for Positioning
3.3. A Comment on Multi-Antenna DD Observations and Processing
3.4. GNSS Attitude Model
3.5. Integer Ambiguity Resolution for Attitude Determination
4. Kalman Filtering for the Joint Positioning and Attitude Estimation
4.1. Prediction Step
4.2. Correction Step
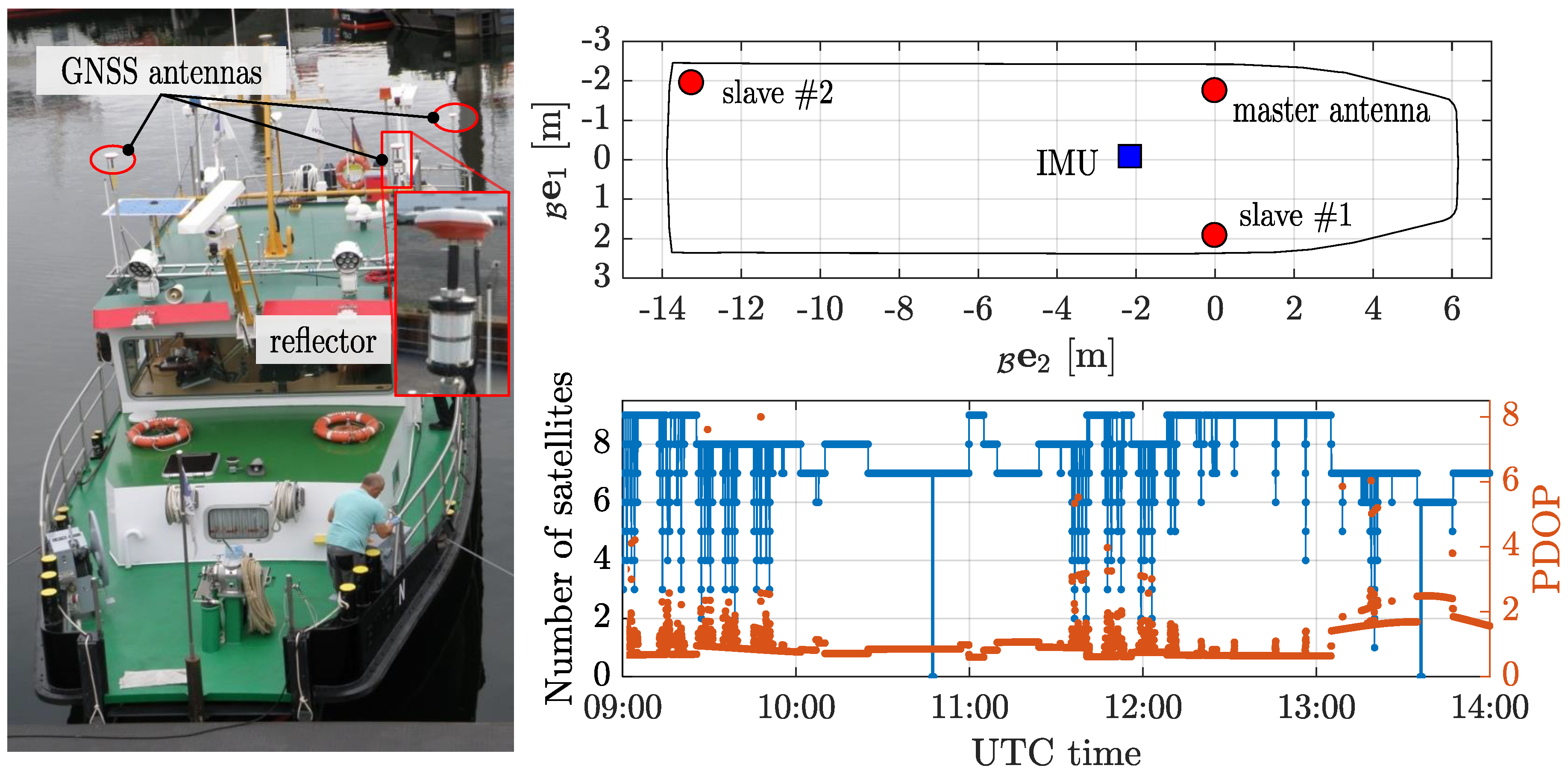
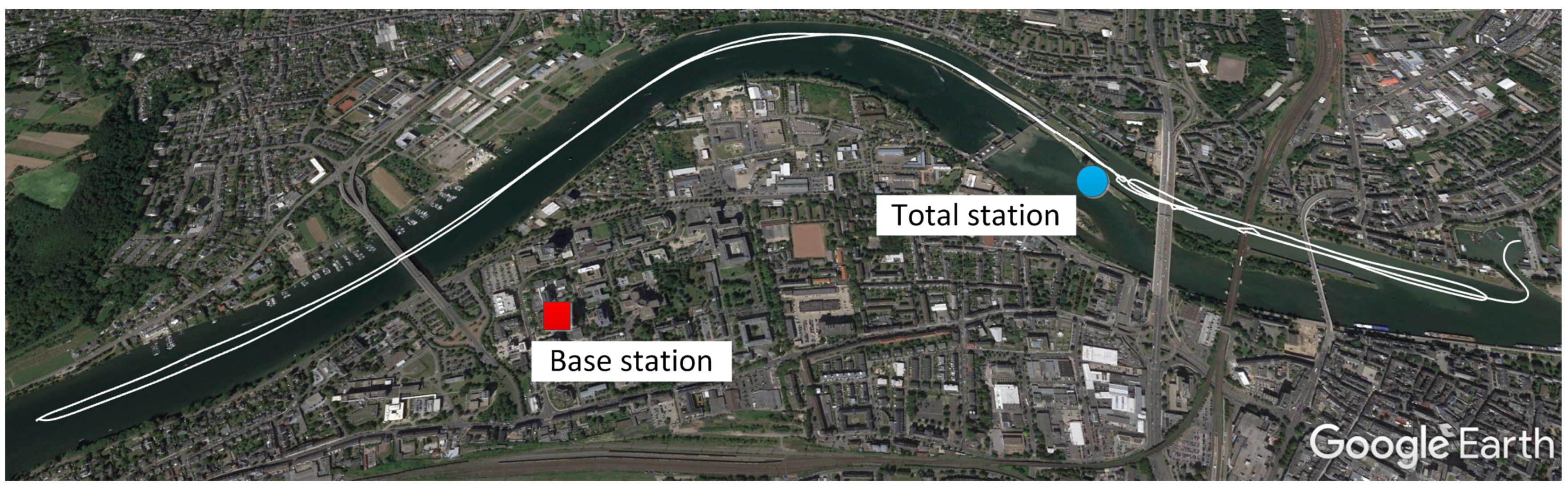
5. Experimental Setup
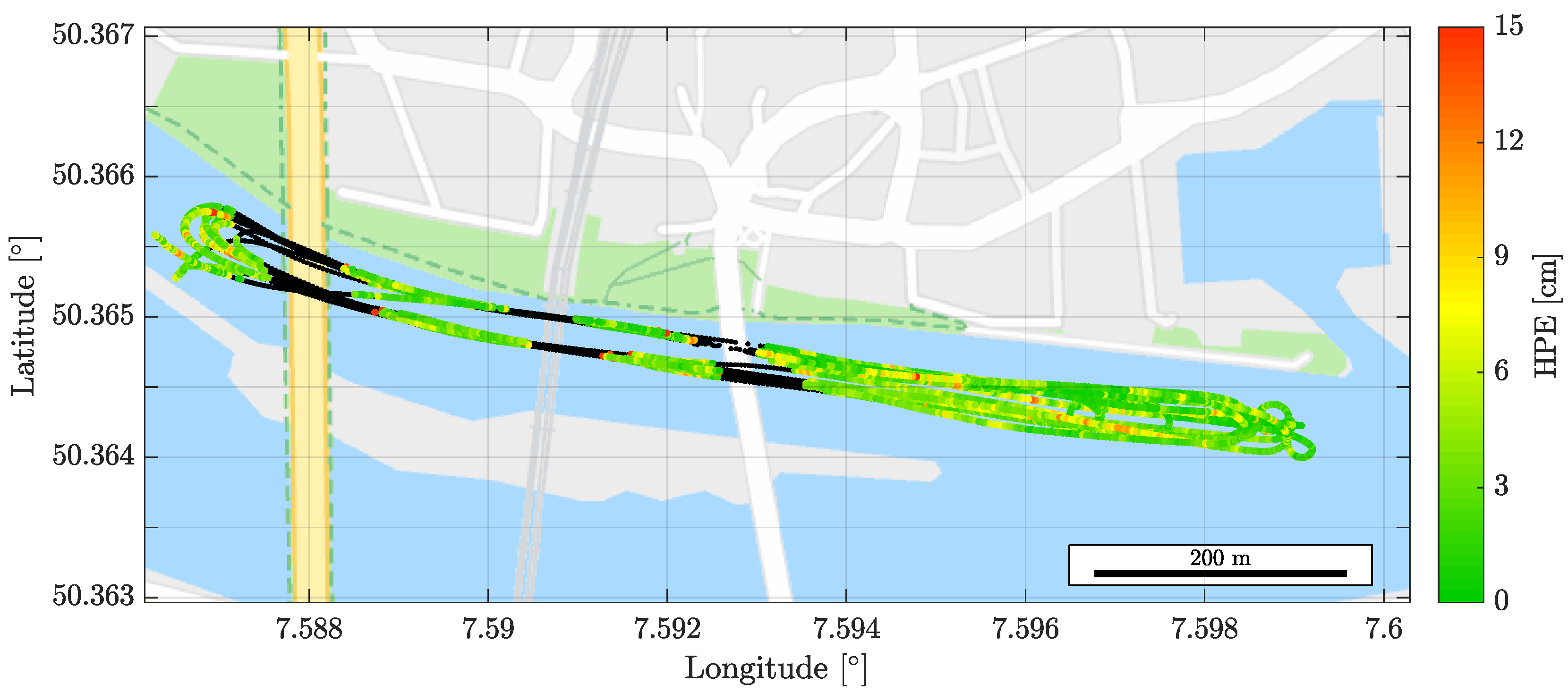
6. Results and Discussion
- (i)
- The attitude model was “stronger” than the positioning one despite the nonlinearities in the observation function. There were two reasons to ground the positioning-attitude difference in performance: on the one hand, small residuals due to the atmospheric propagation delays between the vehicle and the base station might be present despite the short baseline; on the other hand, the data redundancy was higher in the attitude than in the positioning model (i.e., code observations guided the float estimate of the four-dimensional unknown quaternion, while n code measurements supported the search of the three-dimensional unknown position).
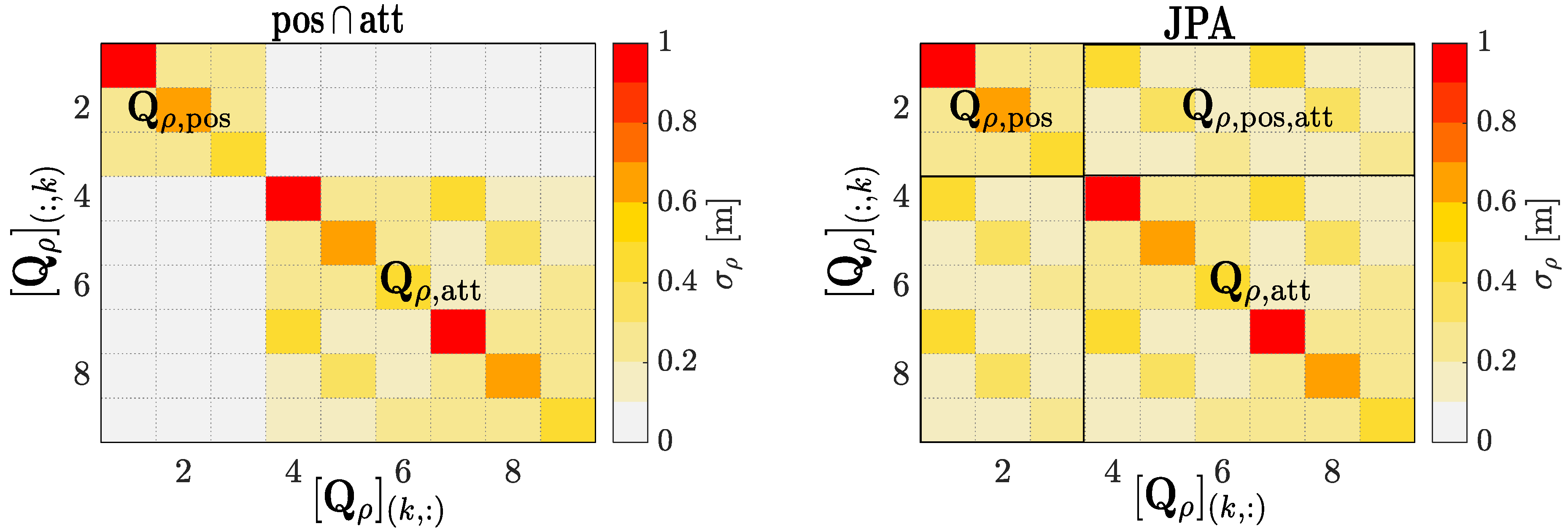
- (ii)
- In average, JPA performed better than the union of separately estimating the position and attitude problems. Thus, the former provided a fixed solution for of the time, while the latter was limited to of time—which was a difference in precise navigation availability of over 45 min. Such increased performance was likely due to exploiting the cross-correlation between the positioning- and attitude-related observations, as discussed in Section 4.
- (iii)
- The standalone attitude problem presented a higher fix ratio compared to the JPA, as it was unaffected by the residual atmospheric propagation delays present in the positioning problem. Thus, a practical application might be interested in executing in parallel the attitude-only and the JPA filters, leading to high availability positioning and attitude estimates and a mechanism to monitor the integrity of the algorithms if discrepancies between the estimates occurred.
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. The Rotation Group and the Quaternion
Jacobian with Respect to the Quaternion
References
- Giorgi, G.; Teunissen, P. GNSS Carrier phase-based attitude determination. In Recent Advances in Aircraft Technology; InTech: London, UK, 2012; pp. 193–220. [Google Scholar]
- Teunissen, P.J. Least-squares estimation of the integer GPS ambiguities. Invited lecture, section IV theory and methodology. In Proceedings of the IAG General Meeting, Beijing, China, 6–13 August 1993. [Google Scholar]
- De Jonge, P.; Tiberius, C. The LAMBDA Method for Integer Ambiguity Estimation: Implementation Aspects; Delft University of Technology: Delft, The Netherlands, 1996. [Google Scholar]
- Joosten, P.; Tiberius, C. Lambda: Faqs. GPS Solut. 2002, 6, 109–114. [Google Scholar] [CrossRef]
- Wang, K.; El-Mowafy, A.; Rizos, C.; Wang, J. Integrity Monitoring for Horizontal RTK Positioning: New Weighting Model and Overbounding CDF in Open-Sky and Suburban Scenarios. Remote Sens. 2020, 12, 1173. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G.; Montenbruck, O. (Eds.) Handbook of Global Navigation Satellite Systems; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Wang, L.; Li, Z.; Ge, M.; Neitzel, F.; Wang, Z.; Yuan, H. Validation and assessment of multi-gnss real-time precise point positioning in simulated kinematic mode using igs real-time service. Remote Sens. 2018, 10, 337. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P. A general multivariate formulation of the multi-antenna GNSS attitude determination problem. Artif. Satell. 2007, 42, 97–111. [Google Scholar] [CrossRef] [Green Version]
- Giorgi, G. GNSS Carrier Phase-Based Attitude Determination: Estimation and Applications. Ph.D. Thesis, TU Delft, Delft, The Netherlands, 2011. [Google Scholar]
- Giorgi, G.; Teunissen, P.J.; Verhagen, S.; Buist, P.J. Testing a new multivariate GNSS carrier phase attitude determination method for remote sensing platforms. Adv. Space Res. 2010, 46, 118–129. [Google Scholar] [CrossRef] [Green Version]
- Eling, C.; Klingbeil, L.; Kuhlmann, H. Real-time single-frequency GPS/MEMS-IMU attitude determination of lightweight UAVs. Sensors 2015, 15, 26212–26235. [Google Scholar] [CrossRef] [Green Version]
- Henkel, P.; Iafrancesco, M.; Sperl, A. Precise point positioning with multipath estimation. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 144–149. [Google Scholar]
- Falco, G.; Pini, M.; Marucco, G. Loose and Tight GNSS/INS Integrations: Comparison of Performance Assessed in Real Urban Scenarios. Sensors 2017, 17, 255. [Google Scholar] [CrossRef]
- Medina, D.; Heßelbarth, A.; Büscher, R.; Ziebold, R.; García, J. On the Kalman filtering formulation for RTK joint positioning and attitude quaternion determination. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 597–604. [Google Scholar]
- Fan, P.; Li, W.; Cui, X.; Lu, M. Precise and Robust RTK-GNSS Positioning in Urban Environments with Dual-Antenna Configuration. Sensors 2019, 19, 3586. [Google Scholar] [CrossRef] [Green Version]
- Markley, F.L. Attitude Error Representations for Kalman Filtering. J. Guid. Control Dyn. 2003, 26, 311–317. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L.; Cheng, Y. Survey of Nonlinear Attitude Estimation Methods. J. Guid. Control Dyn. 2007, 30, 12–28. [Google Scholar] [CrossRef]
- Lorenz, M.; Taetz, B.; Kok, M.; Bleser, G. On attitude representations for optimization-based Bayesian smoothing. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION, Ottawa, ON, Canada, 2–5 July 2019; pp. 1–8. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2001. [Google Scholar] [CrossRef]
- Glass, J.D.; Blair, W.; Bar-Shalom, Y. IMM estimators with unbiased mixing for tracking targets performing coordinated turns. In Proceedings of the 2013 IEEE Aerospace Conference, BigSky, MT, USA, 3–10 March 2013; pp. 1–10. [Google Scholar]
- Blom, H.A.; Bar-Shalom, Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Toledo–Moreo, R.; Zamora–Izquierdo, M.A.; Ubeda-Minarro, B.; Gómez-Skarmeta, A.F. High-Integrity IMM–EKF–Based Road Vehicle Navigation With Low-Cost GPS/SBAS/INS. IEEE Trans. Intell. Transp. Syst. 2007, 8, 491–511. [Google Scholar]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual–inertial odometry using nonlinear optimization. Int. J. Robot. Res. 2014, 34, 314–334. [Google Scholar] [CrossRef] [Green Version]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual–Inertial Odometry. IEEE Trans. Robot. 2016, 33, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Barrau, A.; Bonnabel, S. Intrinsic filtering on Lie groups with applications to attitude estimation. IEEE Trans. Autom. Control 2014, 60, 436–449. [Google Scholar] [CrossRef]
- Mourikis, A.I.; Roumeliotis, S.I. A multi-state constraint Kalman filter for vision-aided inertial navigation. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 3565–3572. [Google Scholar]
- Trawny, N.; Roumeliotis, S.I. Indirect Kalman filter for 3D attitude estimation. Univ. Minnesota Dept. Comp. Sci. Eng. Tech. Rep 2005, 2, 2005. [Google Scholar]
- Solà, J. Quaternion kinematics for the error-state Kalman filter. arXiv 2017, arXiv:1711.02508. [Google Scholar]
- Onishchik, A.L.; Vinberg, E.; Minachin, V. Lie Groups and Lie Algebras; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Stillwell, J. Naive Lie Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Sola, J.; Deray, J.; Atchuthan, D. A micro Lie theory for state estimation in robotics. arXiv 2018, arXiv:1812.01537. [Google Scholar]
- Langley, R.B. RTK GPS. GPS World 1998, 9, 70–76. [Google Scholar]
- Teunissen, P.J. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Absil, P.A.; Mahony, R.; Sepulchre, R. Optimization Algorithms on Matrix Manifolds; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Lass, C.; Arias Medina, D.; Herrera Pinzón, I.D.; Ziebold, R. Methods of robust snapshot positioning in Multi-Antenna systems for inland water applications. In Proceedings of the European Navigation Conference 2016, Helsinki, Finland, 30 May–2 June 2016. [Google Scholar]
- Nocedal, J.; Wright, S. Numerical Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Medina, D.; Centrone, V.; Ziebold, R.; García, J. Attitude Determination via GNSS Carrier Phase and Inertial Aiding. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 23–28 September 2009; Institute of Navigation: Manassas, VA, USA, 2019. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.; Giorgi, G.; Buist, P.J. Testing of a new single-frequency GNSS carrier phase attitude determination method: Land, ship and aircraft experiments. GPS Solut. 2011, 15, 15–28. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J. An optimality property of the integer least-squares estimator. J. Geod. 1999, 73, 587–593. [Google Scholar] [CrossRef]
- Medina, D.; Vilà-Valls, J.; Chaumette, E.; Vincent, F.; Closas, P. Cramér-Rao Bound for a Mixture of Real- and Integer-valued Parameter Vectors and its Application to the Linear Regression Model. Signal Process. 2020. submitted. [Google Scholar]
- Kuusniemi, H.; Wieser, A.; Lachapelle, G.; Takala, J. User-level reliability monitoring in urban personal satellite-navigation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1305–1318. [Google Scholar] [CrossRef]
- Medina, D.; Gibson, K.; Ziebold, R.; Closas, P. Determination of pseudorange error models and multipath characterization under signal-degraded scenarios. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 24–28. [Google Scholar]
- Das, P.; Ortega, L.; Vilà-Valls, J.; Vincent, F.; Chaumette, E.; Davain, L. Performance Limits of GNSS Code-Based Precise Positioning: GPS, Galileo & Meta-Signals. Sensors 2020, 20, 2196. [Google Scholar]
- Medina, D.; Ortega, L.; Vilà-Valls, J.; Vilà-Valls, J.; Closas, P.; Vincent, F.; Chaumette, E. A New Compact CRB for Delay, Doppler and Phase Estimation—Application to GNSS SPP & RTK Performance Characterization. IET Radar Sonar Navig. 2020. [Google Scholar] [CrossRef]
- Odijk, D. Weighting ionospheric corrections to improve fast GPS positioning over medium distances. In Proceedings of the ION GPS, Salt Lake City, UT, USA, 19–22 September 2000; pp. 1113–1123. [Google Scholar]
- Brack, A. Partial ambiguity resolution for reliable GNSS positioning—A useful tool? In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–7. [Google Scholar]
- iMar Navigation GmbH. iMar IMU FCAI-E Datasheet. Available online: https://www.imar-navigation.de/downloads/IMU_FCAI-03_f.pdf (accessed on 11 June 2020).
- Trimble. Trimble S5 Total Station Datasheet. Available online: https://geospatial.trimble.com/sites/geospatial.trimble.com/files/2019-06/022516-153F_TrimbleS5_DS_USL_0619_LR-sec.pdf (accessed on 11 June 2020).
- Verhagen, S. Integer ambiguity validation: An open problem? GPS Solut. 2004, 8, 36–43. [Google Scholar] [CrossRef]
- Verhagen, S.; Teunissen, P.J. The ratio test for future GNSS ambiguity resolution. GPS Solut. 2013, 17, 535–548. [Google Scholar] [CrossRef]
- Medina, D.; Li, H.; Vilà-Valls, J.; Closas, P. Robust Statistics for GNSS Positioning under Harsh Conditions: A Useful Tool? Sensors 2019, 19, 5402. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Medina, D.; Vilà-Valls, J.; Closas, P. Robust Kalman Filter for RTK Positioning Under Signal-Degraded Scenarios. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 23–28 September 2009; pp. 16–20. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Satellites/Time (%) | Fix Ratio (%) | |||
|---|---|---|---|---|
| JPA | Positioning | Attitude | Pos ∩ Attitude | |
| 9/ | 85.94 | 82.30 | 83.25 | 73.10 |
| 8/ | 83.93 | 54.07 | 78.50 | 49.07 |
| 7/ | 68.12 | 60.22 | 81.58 | 53.49 |
| 6/ | 47.78 | 65.27 | 66.89 | 60.24 |
| ≤5/ | 01.17 | 02.33 | 02.56 | 01.40 |
| Total | 74.60 | 63.84 | 79.35 | 57.11 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Medina, D.; Vilà-Valls, J.; Hesselbarth, A.; Ziebold, R.; García, J. On the Recursive Joint Position and Attitude Determination in Multi-Antenna GNSS Platforms. Remote Sens. 2020, 12, 1955. https://doi.org/10.3390/rs12121955
Medina D, Vilà-Valls J, Hesselbarth A, Ziebold R, García J. On the Recursive Joint Position and Attitude Determination in Multi-Antenna GNSS Platforms. Remote Sensing. 2020; 12(12):1955. https://doi.org/10.3390/rs12121955
Chicago/Turabian StyleMedina, Daniel, Jordi Vilà-Valls, Anja Hesselbarth, Ralf Ziebold, and Jesús García. 2020. "On the Recursive Joint Position and Attitude Determination in Multi-Antenna GNSS Platforms" Remote Sensing 12, no. 12: 1955. https://doi.org/10.3390/rs12121955
APA StyleMedina, D., Vilà-Valls, J., Hesselbarth, A., Ziebold, R., & García, J. (2020). On the Recursive Joint Position and Attitude Determination in Multi-Antenna GNSS Platforms. Remote Sensing, 12(12), 1955. https://doi.org/10.3390/rs12121955