A Tropospheric Tomography Method with a Novel Height Factor Model Including Two Parts: Isotropic and Anisotropic Height Factors




Abstract

1. Introduction
2. Height Factor Model for GNSS Tomography
2.1. Tropospheric Transmission of the GNSS Signal
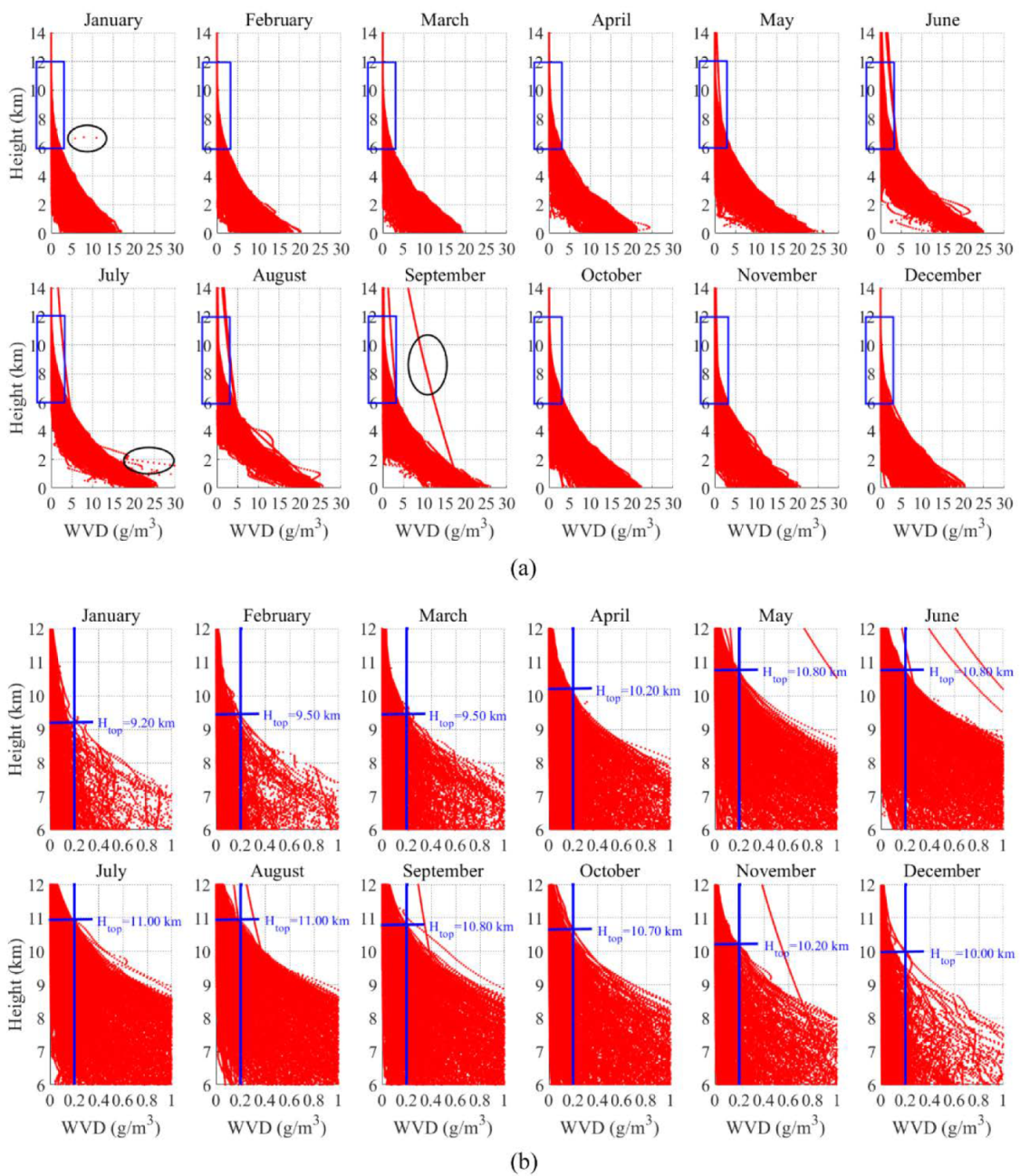
2.2. Dynamicity of the Tomography Top Boundary
2.3. Construction of the Height Factor Model
2.3.1. Isotropic Component of SWD for Inside Signals
- The initial radiosonde data is encrypted to produce uniform data with a vertical resolution of 100 m and the water vapor density of the interpolation points is calculated using the cubic spline interpolation algorithm [37]. In the processing of radiosonde observations, the vertical resolution of radiosonde data at different remote sensing time is variable, i.e., the resolution of data in the lower layer is higher than that in the upper layer. It should be noted that observations with an even distribution can generate a more accurate fitting model. Therefore, the initial radiosonde data should first be encrypted to produce uniform data.
- The partial ZWD is computed from the surface to a certain height using Equation (6).
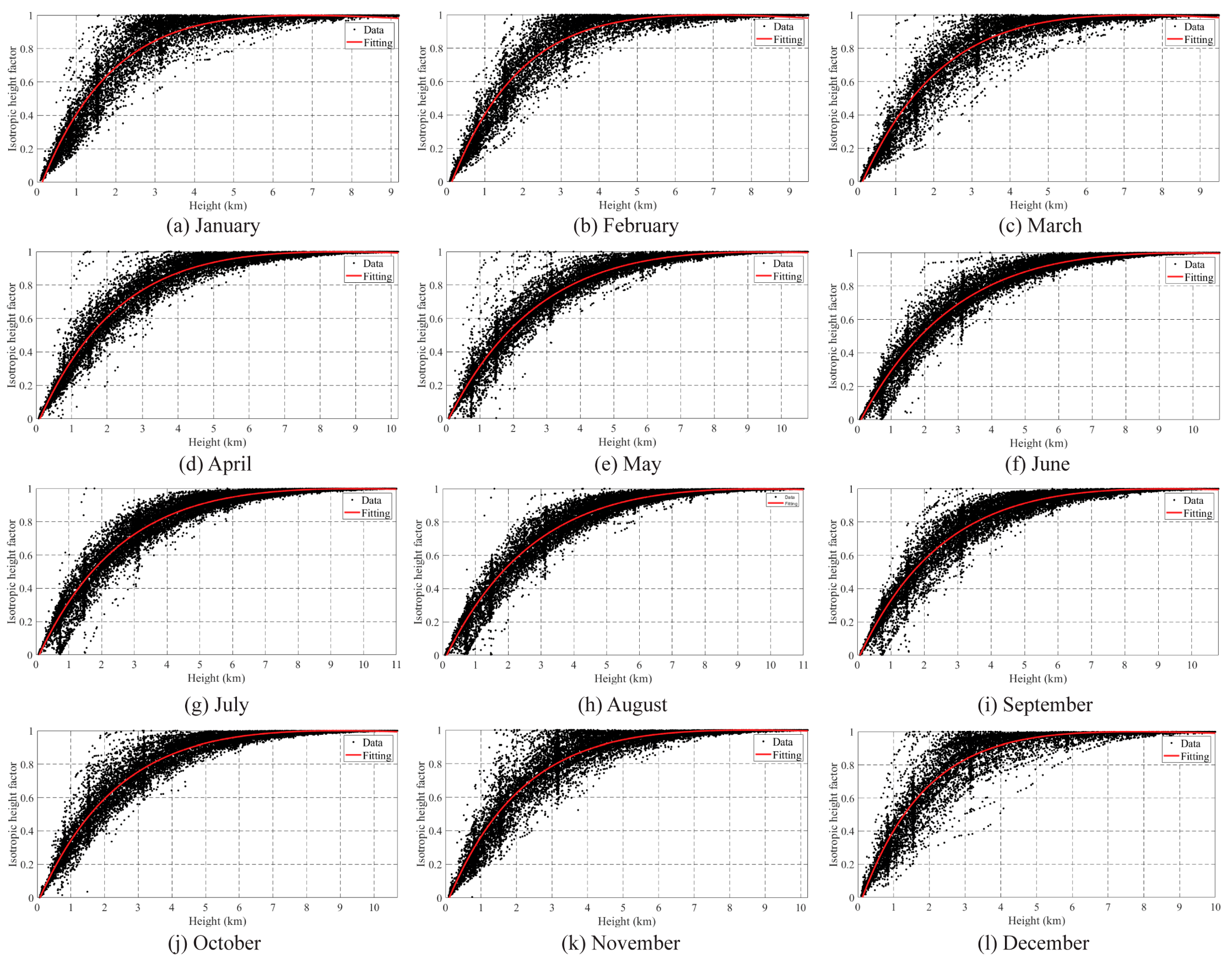
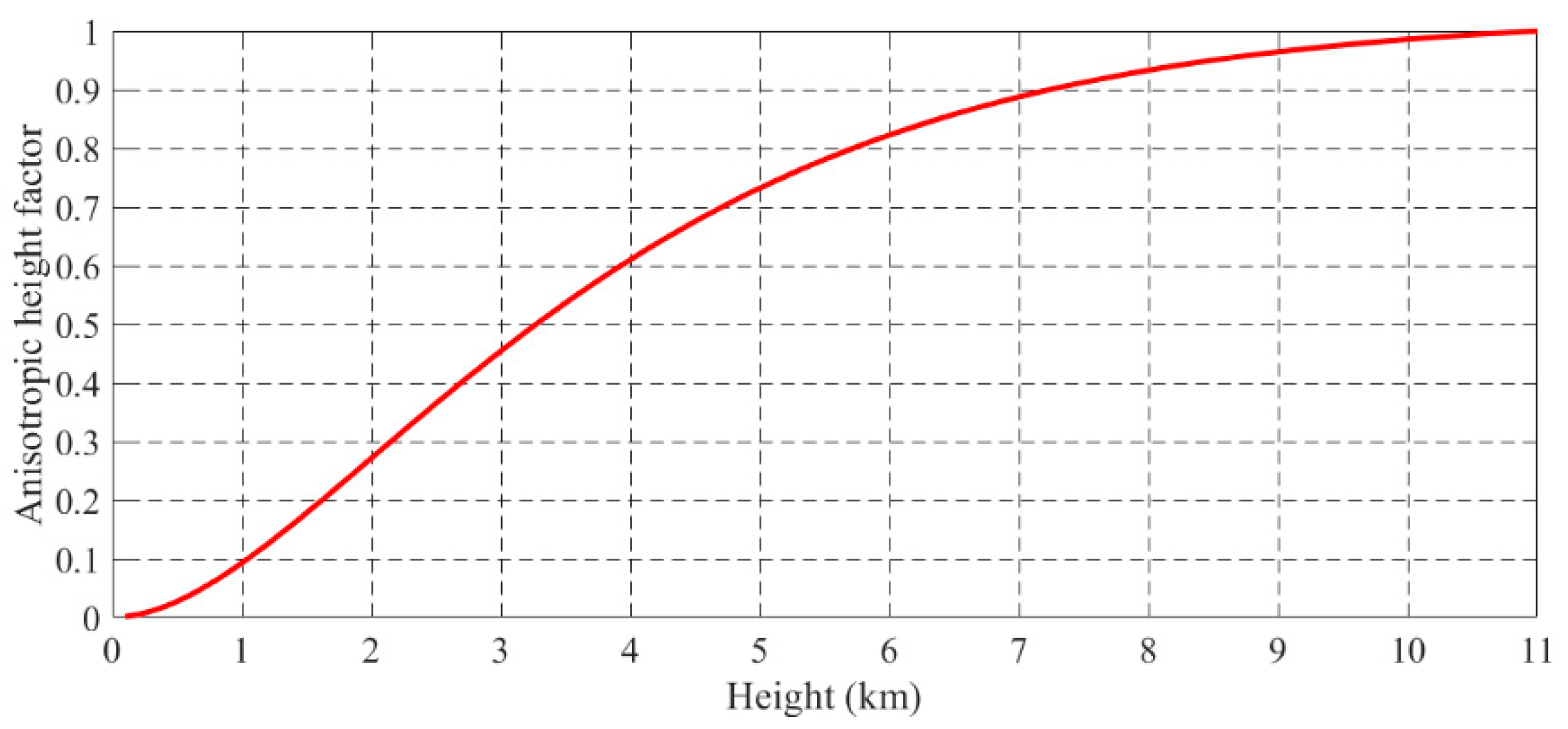
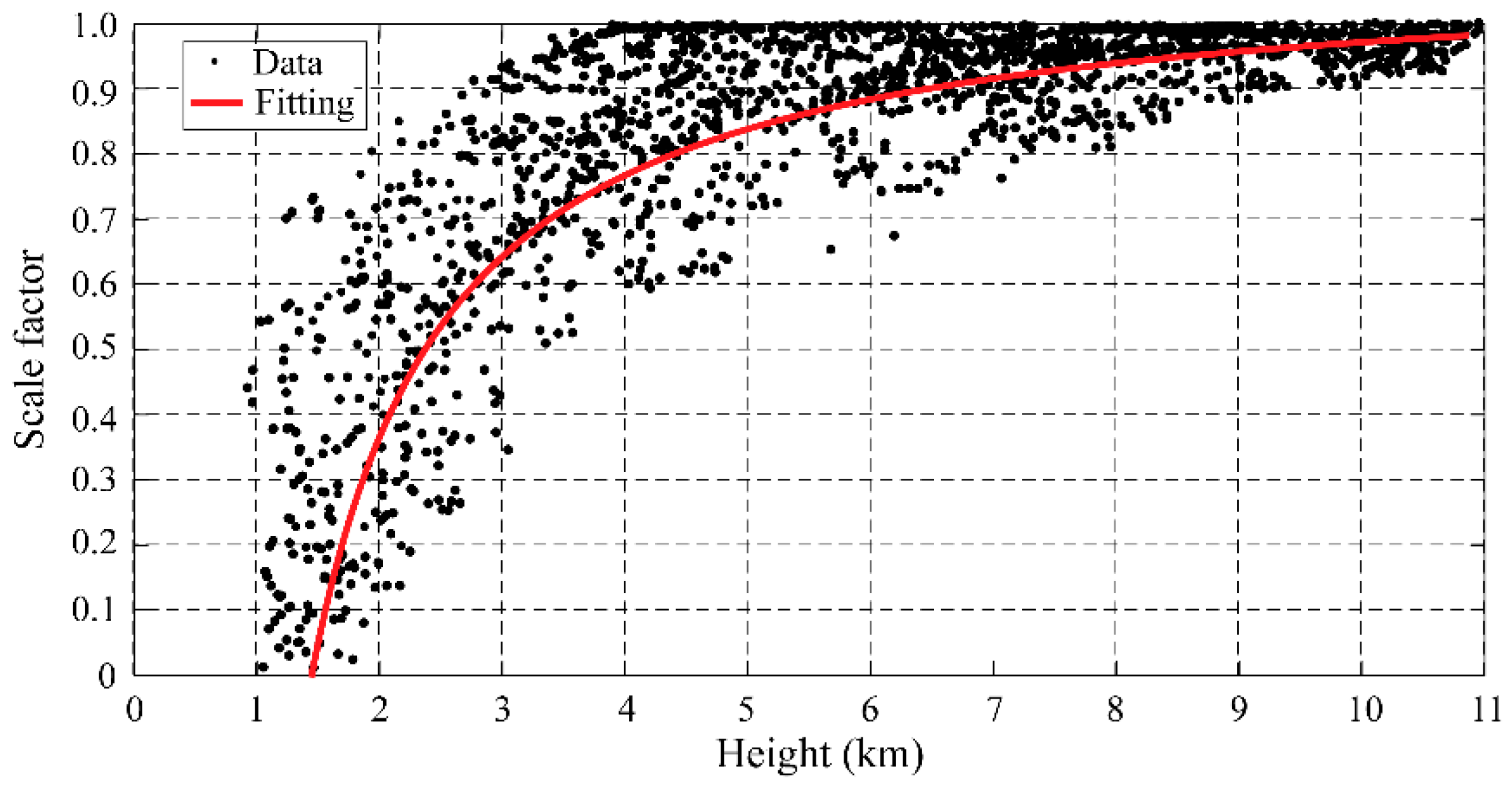
- The isotropic height factor , which represents the ratio between the partial content of ZWD and the total ZWD, as shown in Equation (7).where denotes the partial ZWD from the surface to the height , and derived from the GNSS data is the total ZWD of the stations. Figure 3 shows the relationship between the isotropic height factor and the height based on the 30-year radiosonde data from different months in Hong Kong.
- The function relationship between the and . In view of the variety of atmospheric water vapor, owing to the fact that the radiosonde balloon in Hong Kong is launched twice a day, at 00:00 UTC and 12:00 UTC, the radiosonde data cannot provide sufficient observations for daily-scale analysis. In addition, according to the periodic characteristics of ZTD and precipitable water vapor (PWV) [1,38], the relationship between the isotropic height factor and the height using 30 years of radiosonde data from 12 months is presented in Figure 3. Besides, the long-term trends of the isotropic height factor will not have an important impact on the tomography results. On the other hand, the wet refractivity water vapor decreases exponentially with height in the troposphere, and it is found from Equation (7) that the isotropic height factor is related to the wet refractivity in the zenith direction. In the work of Yao and Zhao [14], Zhao et al. [39], and Zhao et al. [27], a similar scale factor or truncation factor is introduced, the trend of which changes with the height, as analyzed based on the exponential relationship in all three studies.
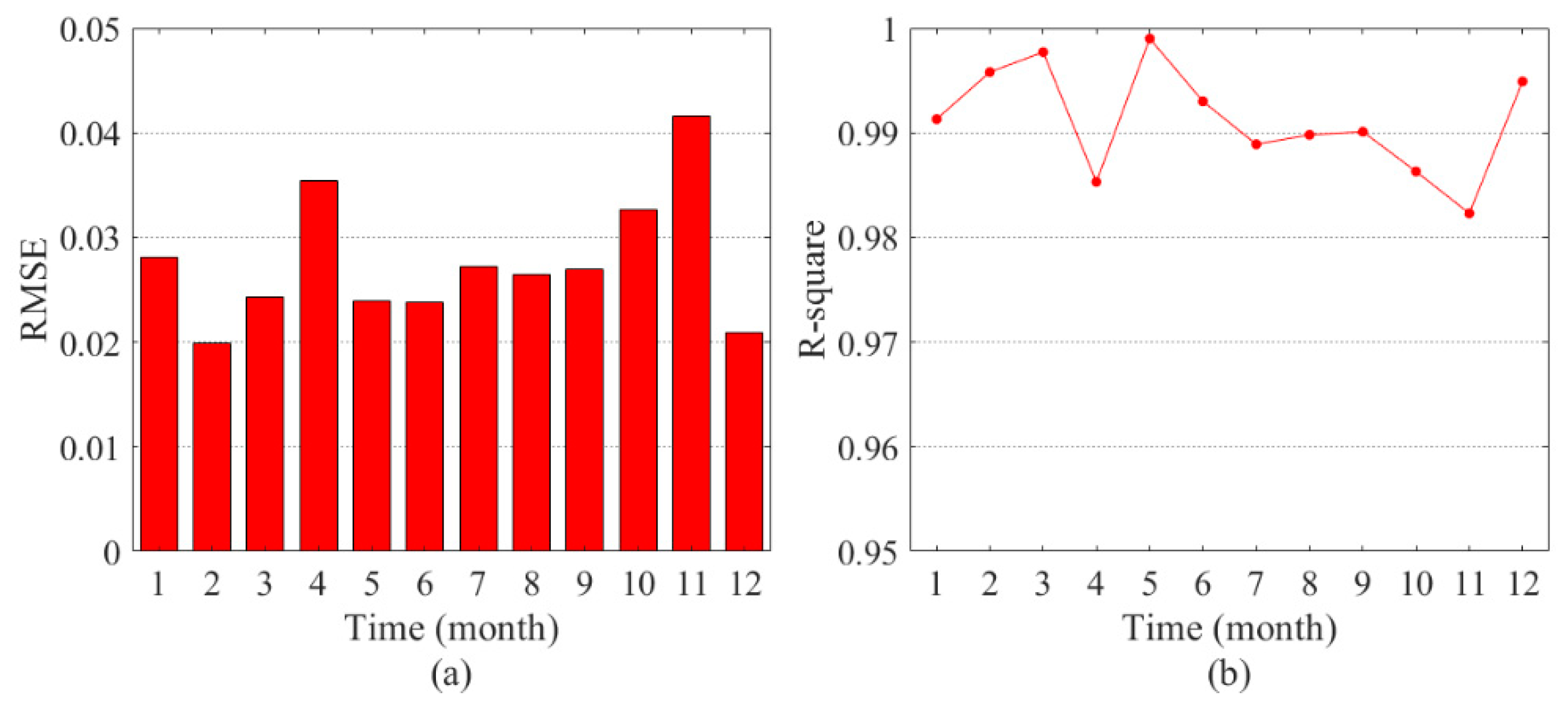
- Accordingly, the HFM is established as follows:where , , , and represent the coefficients of the HFM, which are determined by least-squares fitting [27]. It should be noted that the different weather conditions during the 30 years are not classified, which may have an impact on obtaining the SWV of side signals and needs to be analyzed in future work.
2.3.2. Anisotropic Component of SWD for Inside Signals
3. Modeling the GNSS Observations with the Proposed HFM
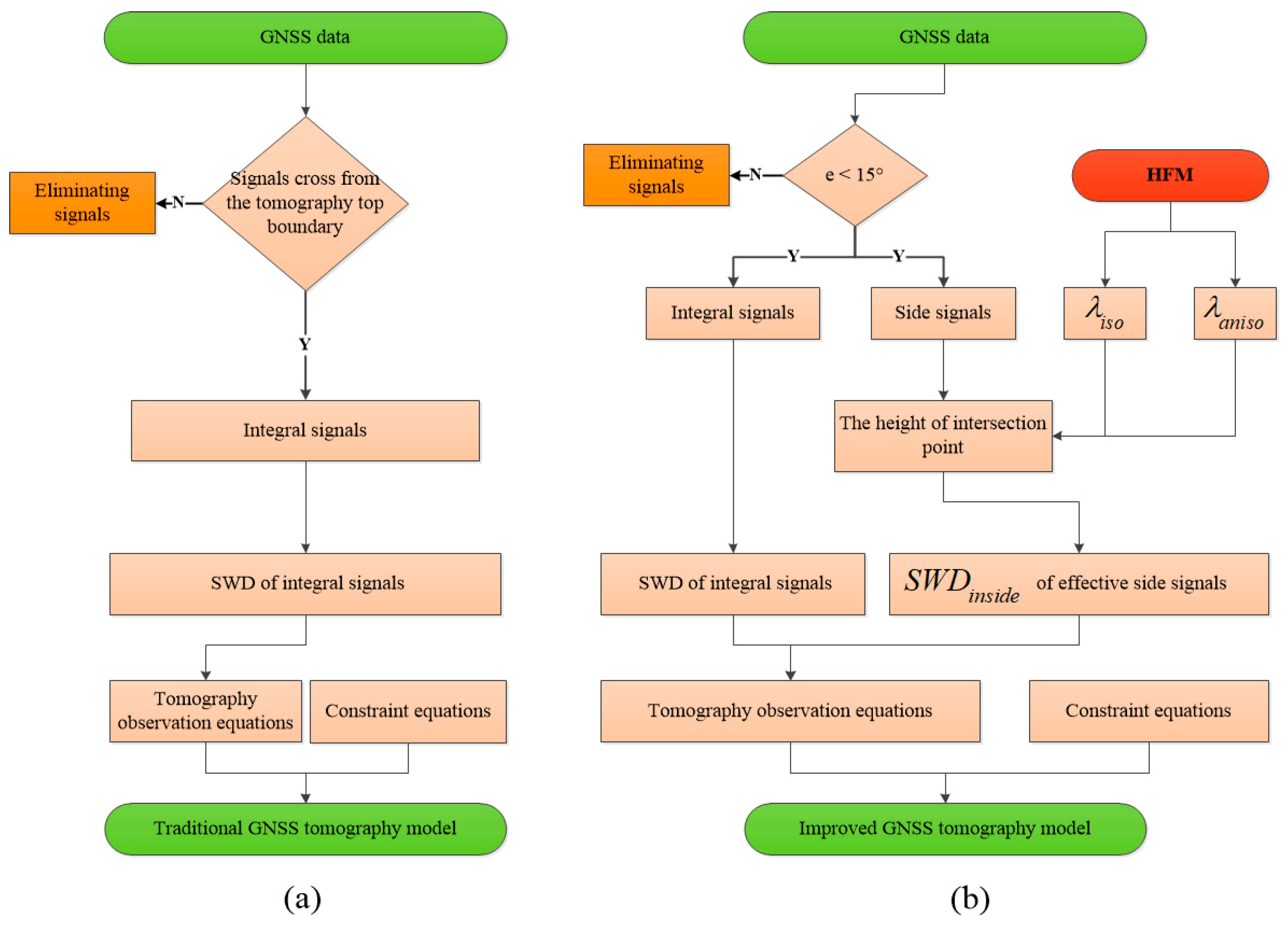
3.1. Constructing Tomography Observation Equations Using Integral Signals
3.2. Constructing Tomography Observation Equations Using Inside Signals
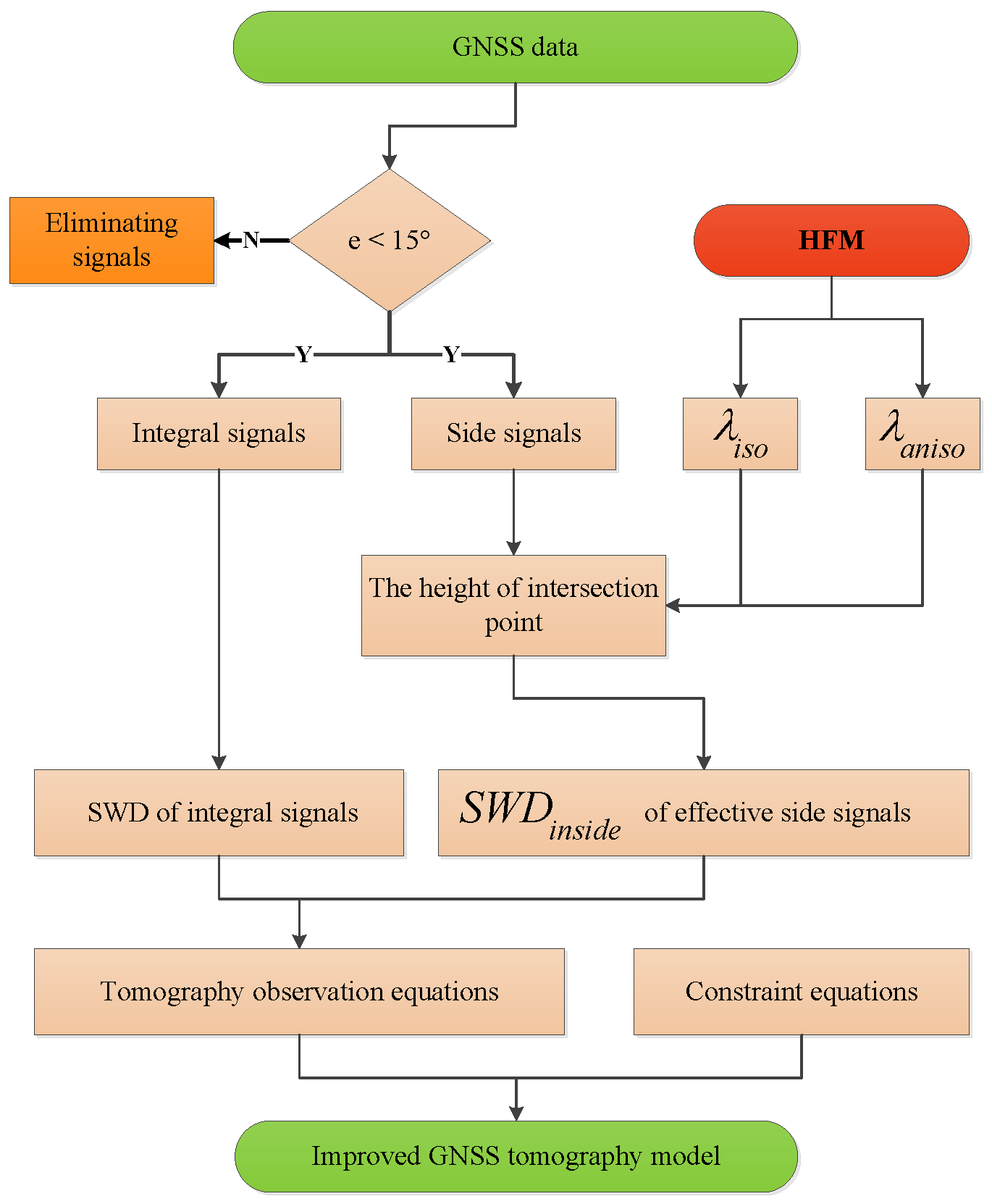
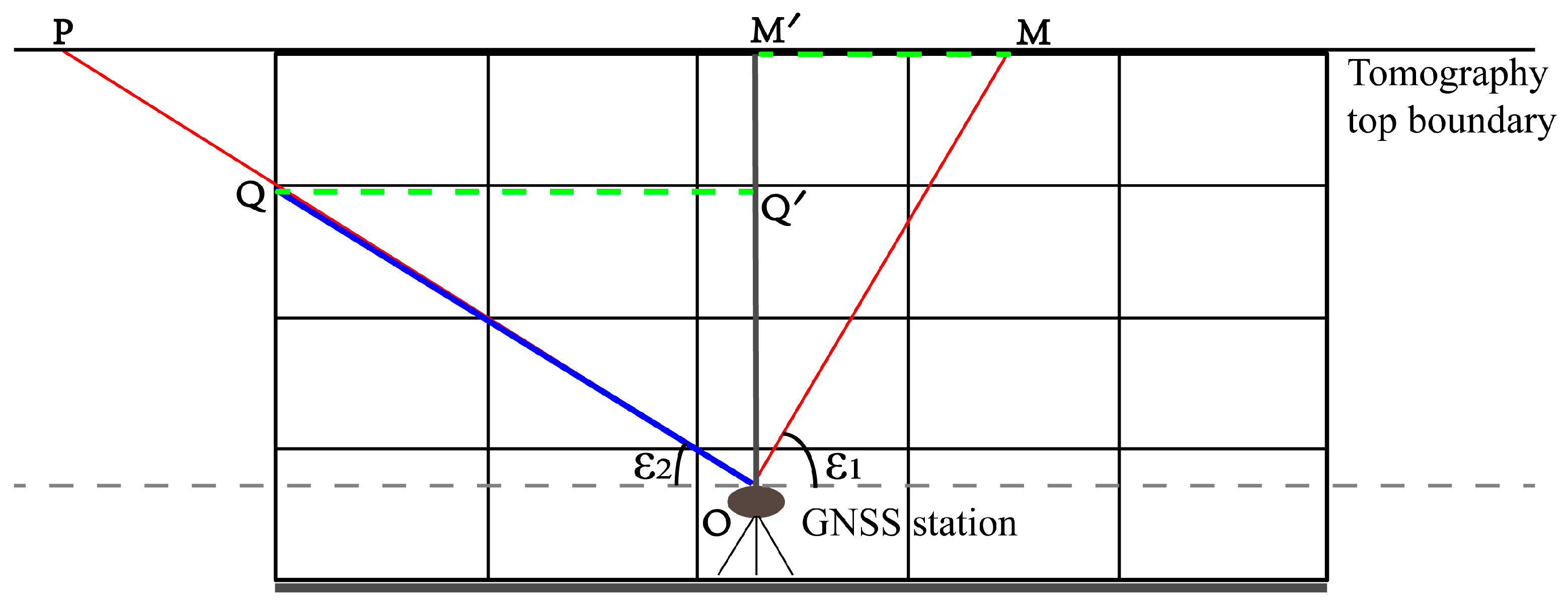
- The height of the intersection point between the effective side signals and the side face of the tomographic area is calculated. The and are estimated by Equations (8) and (15), respectively. Then, the SWD of inside signals can be calculated using Equation (17);
- The distance information of inside signals is obtained with the ray-tracing method [42], and the unknowns are related to the inside observations by the following equation:where is the observation vector of inside signals and represents the observation matrix derived from inside signals.
3.3. Constructing Tomography Constraint Equations
4. Experiments and Results
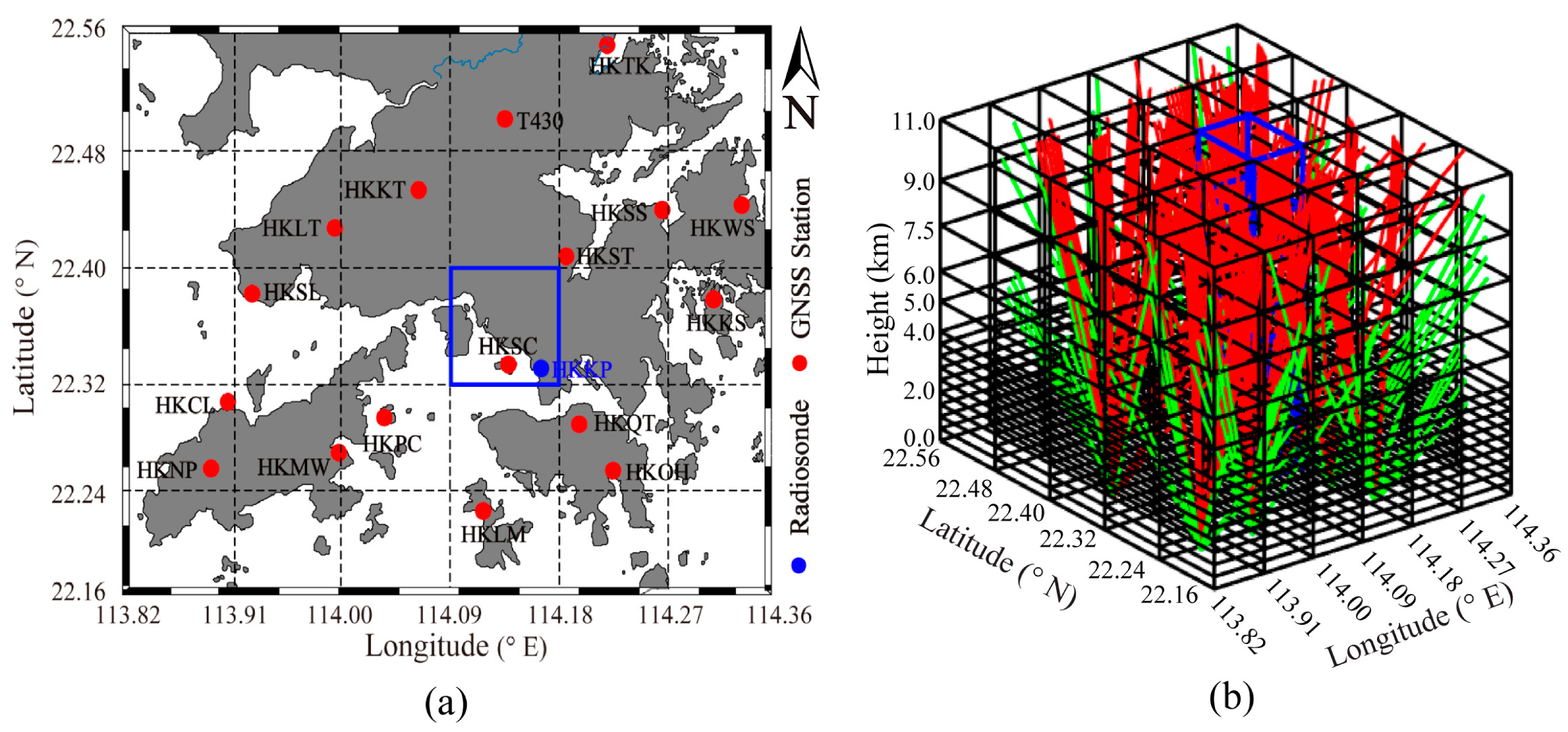
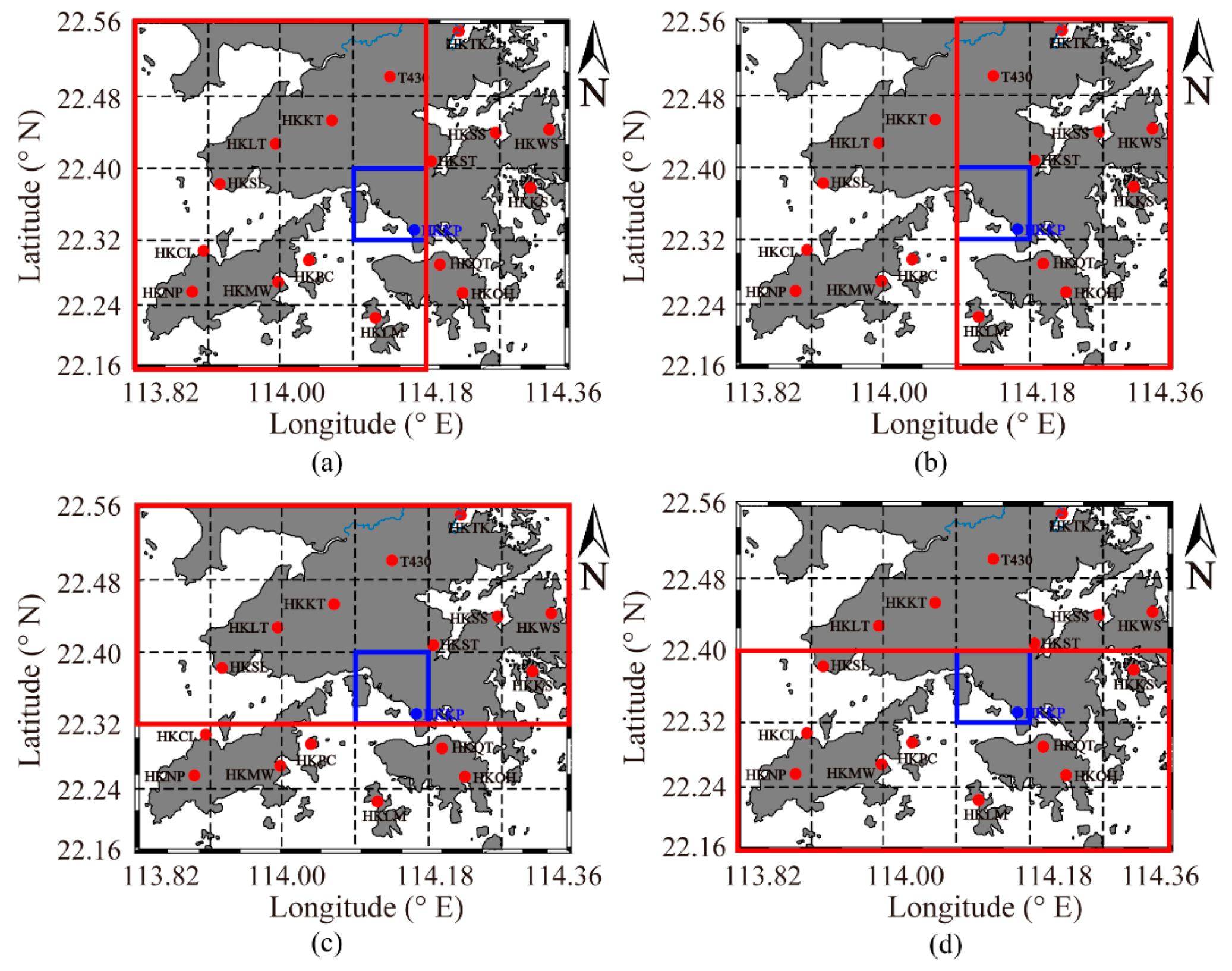
4.1. Experimental Schemes
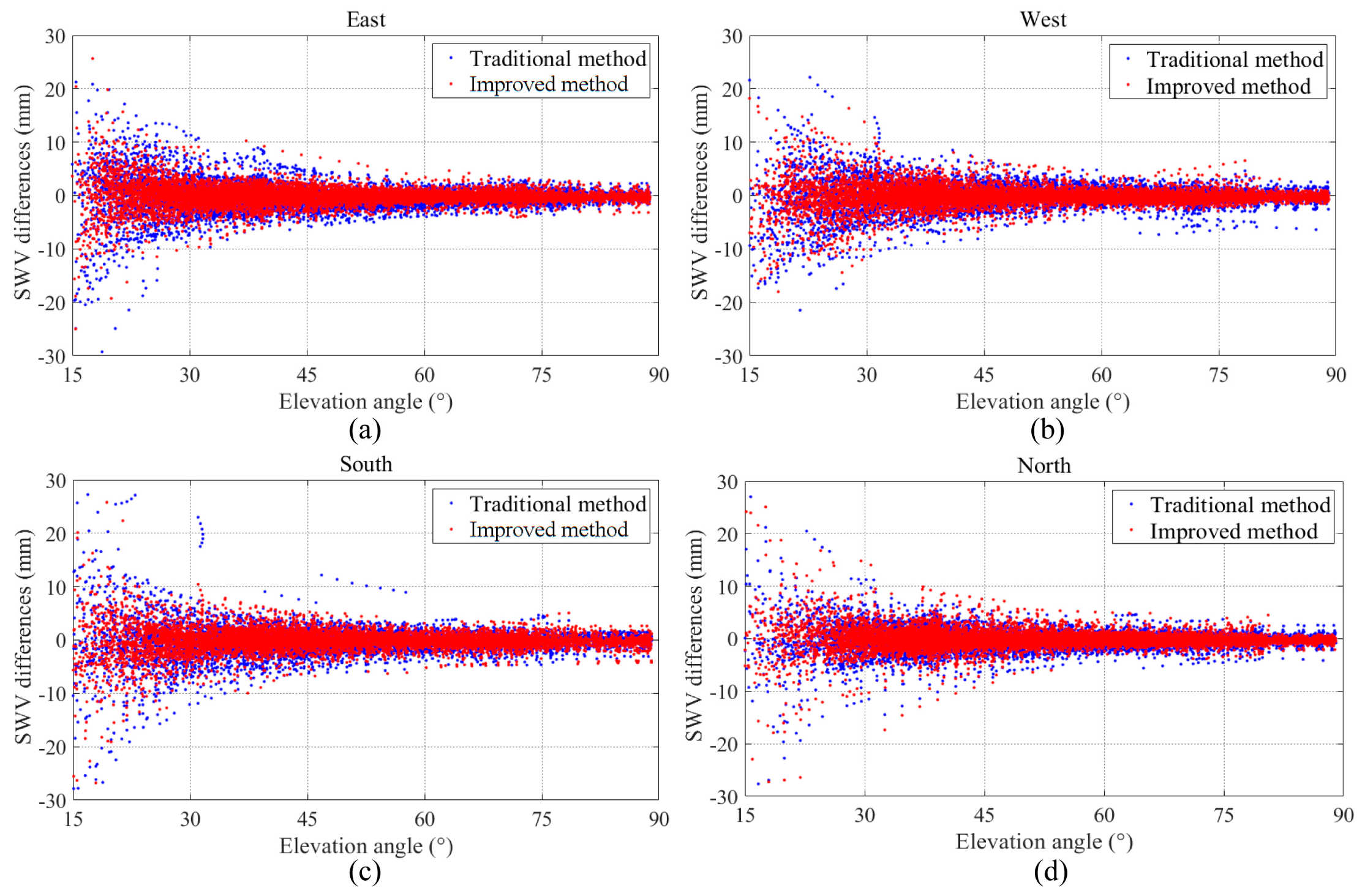
4.2. Contribution Analysis of the Side Signals
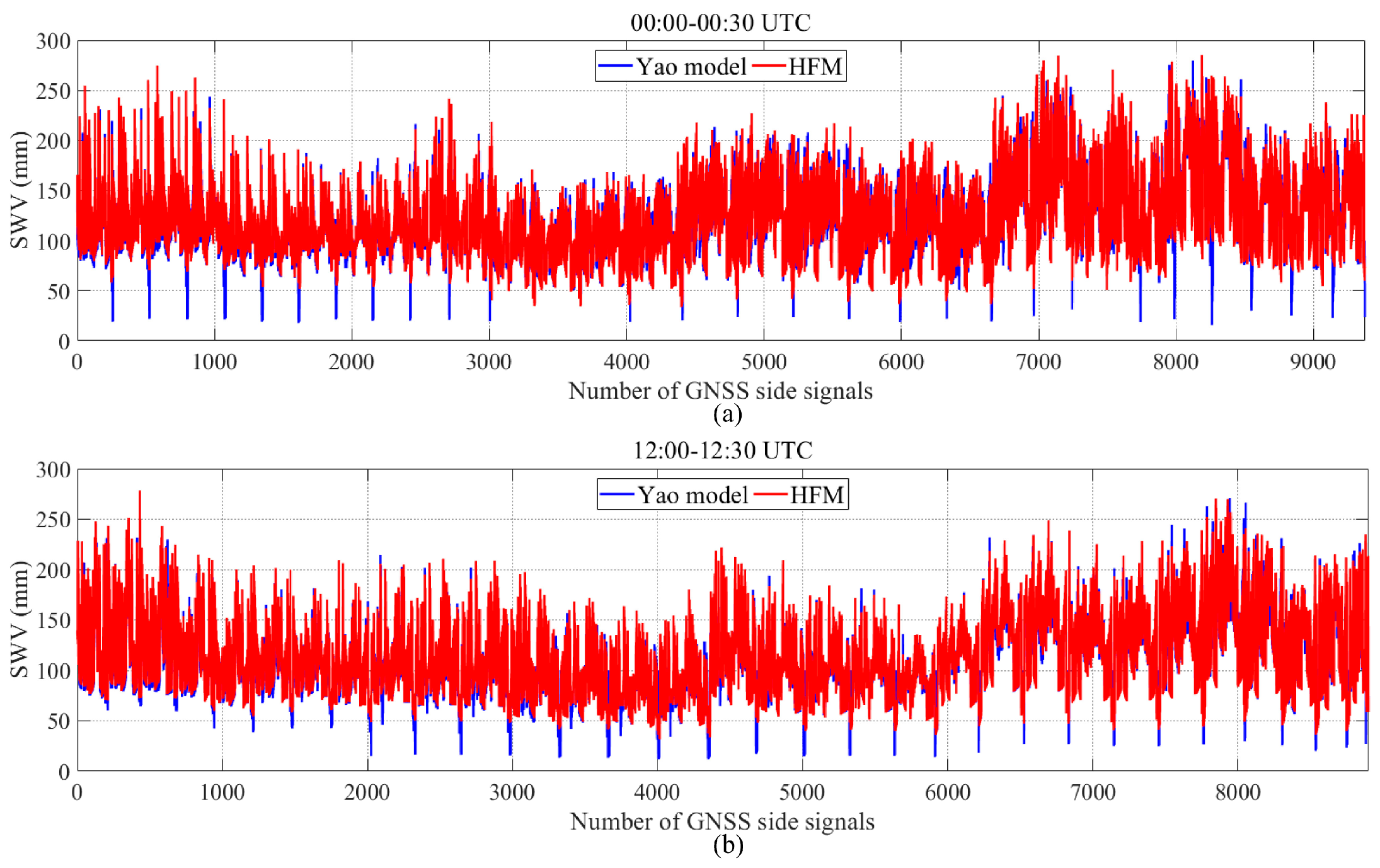
4.3. Comparison with the Existing Correction Model
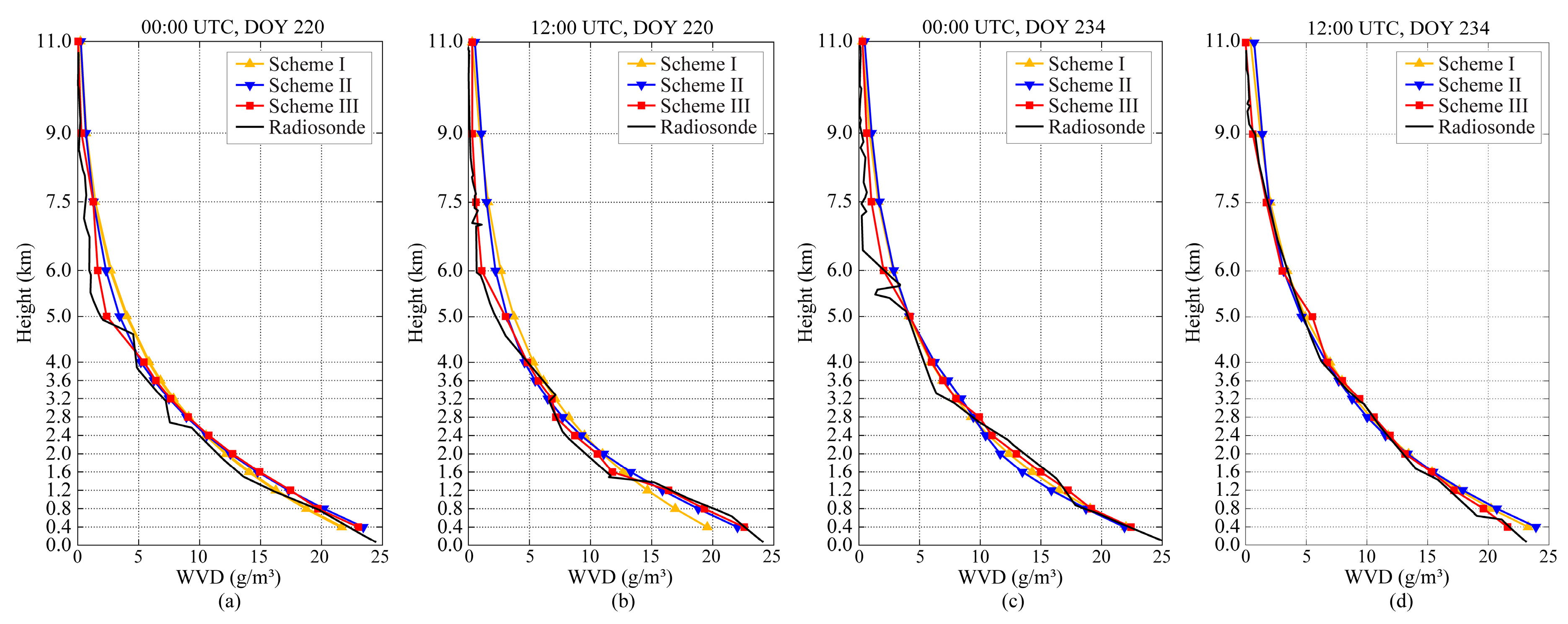
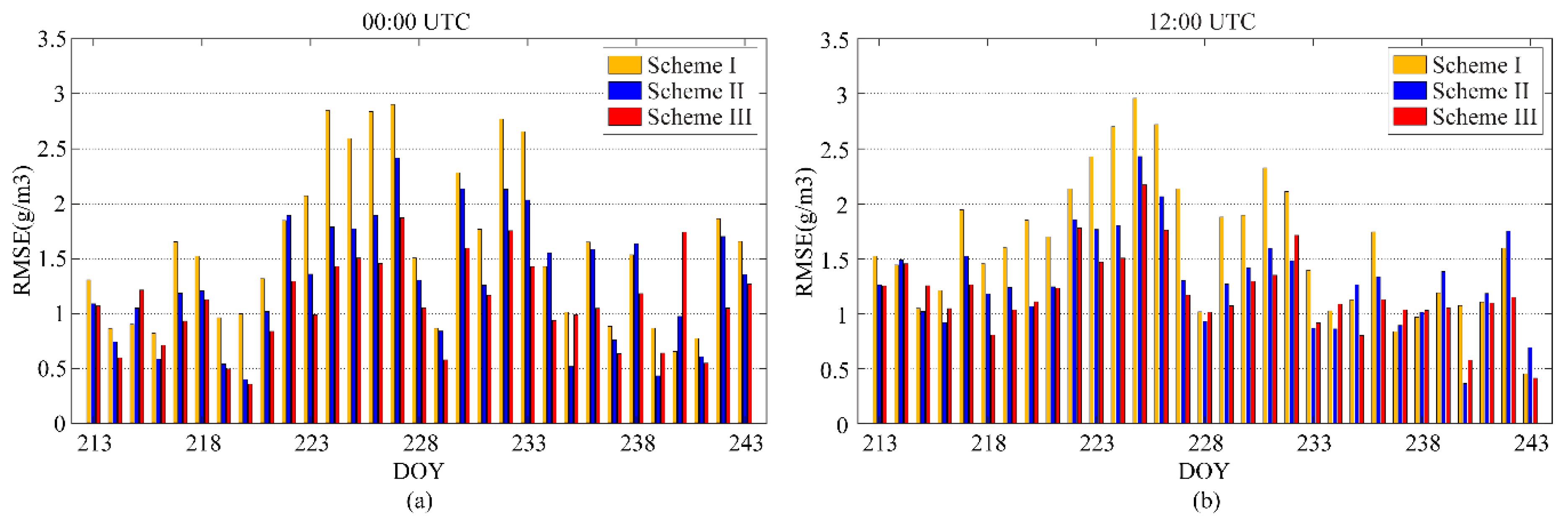
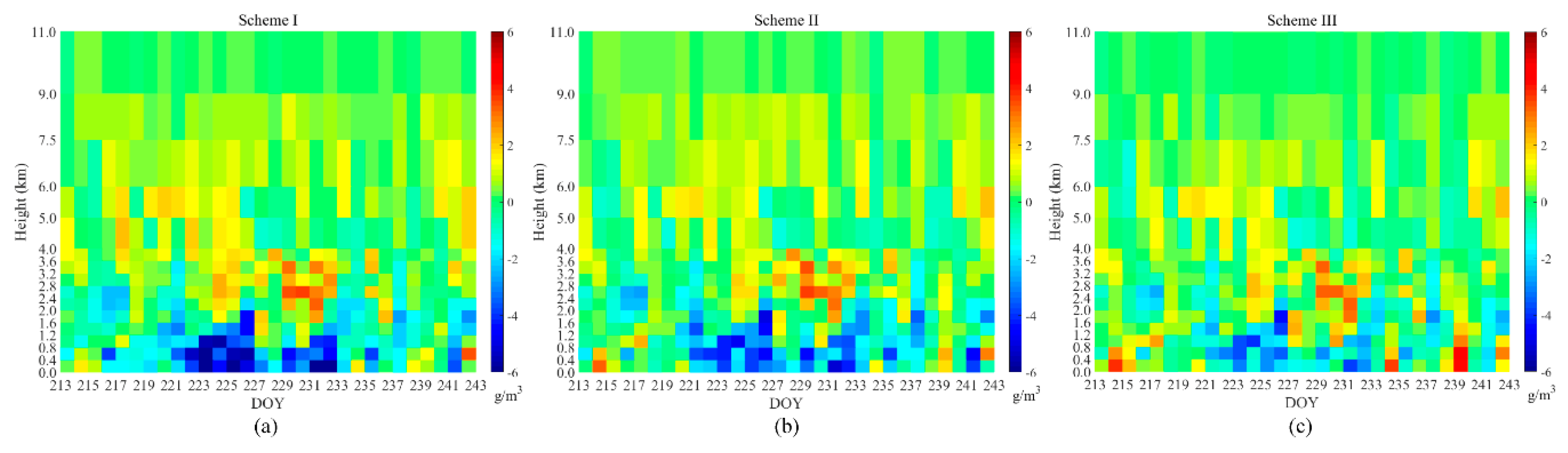
- Scheme I: The traditional tomography method that only considers the GNSS signals crossing the top boundary is adopted to construct the observation equations;
- Scheme II: The Yao model is used to estimate the SWV of side rays and build the equations with both rays passing from the top and side boundary;
- Scheme III: The HFM is employed to calculate the and structure the tomography system with top and side observations.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Benevides, P.; Catalao, J.; Miranda, P.M.A. On the inclusion of GPS precipitable water vapour in the nowcasting of rainfall. Nat. Hazard Earth Syst. 2015, 15, 2605–2616. [Google Scholar] [CrossRef]
- Chen, B.Y.; Liu, Z.Z.; Wong, W.K.; Woo, W.C. Detecting Water Vapor Variability during Heavy Precipitation Events in Hong Kong Using the GPS Tomographic Technique. J. Atmos. Ocean. Technol. 2017, 34, 1001–1019. [Google Scholar] [CrossRef]
- Guerova, G.; Jones, J.; Dousa, J.; Dick, G.; Haan, S.; Pottiaux, E.; Bock, O.; Pacione, R.; Elgered, G.; Vedel, H.; et al. Review of the State-of-the-Art and Future Prospects of the Ground-Based GNSS Meteorology in Europe. Atmos. Meas. Tech. 2016, 9, 5385–5406. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, Y.; Ma, X.; Yao, W.; Yao, Y.; Li, X. An Improved Rainfall Forecasting Model Based on GNSS Observations. IEEE Trans. Geosci. Remote Sens. 2020, 1–10. [Google Scholar] [CrossRef]
- Lu, C.; Li, X.; Ge, M.; Heinkelmann, R.; Nilsson, T.; Soja, B.; Dick, G.; Schuh, H. Estimation and evaluation of real-time precipitable water vapor from GLONASS and GPS. GPS Solut. 2016, 20, 703–713. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wu, S.; Li, Z.; Cheng, Y.; Li, L.; Yuan, H. The correlation between GNSS-derived precipitable water vapor and sea surface temperature and its responses to El Niño–Southern Oscillation. Remote Sens. Environ. 2018, 216, 1–12. [Google Scholar] [CrossRef]
- Flores, A.; Ruffini, G.; Rius, A. 4D tropospheric tomography using GPS slant wet delays. In Annales Geophysicae; Springer: Berlin, Germany, 2000. [Google Scholar]
- Gradinarsky, L.; Jarlemark, P. Ground-Based GPS Tomography of Water Vapor: Analysis of Simulated and Real Data. J. Meteorol. Soc. Jpn. 2004, 82, 551–560. [Google Scholar] [CrossRef][Green Version]
- Champollion, C.; Masson, F.; Bouin, M.; Walpersdorf, A.; Doerflinger, E.; Bock, O.; Van Baelen, J. GPS water vapour tomography: Preliminary results from the ESCOMPTE field experiment. Atmos. Res. 2005, 74, 253–274. [Google Scholar] [CrossRef]
- Bender, M.; Dick, G.; Ge, M.; Deng, Z.; Wickert, J.; Kahle, H.-G.; Raabe, A.; Tetzlaff, G. Development of a GNSS water vapour tomography system using algebraic reconstruction techniques. Adv. Space Res. 2010, 47, 1704–1720. [Google Scholar] [CrossRef]
- Rohm, W.; Bosy, J. The verification of GNSS tropospheric tomography model in a mountainous area. Adv. Space Res. 2011, 47, 1721–1730. [Google Scholar] [CrossRef]
- Benevides, P.; Catalão, J.; Miranda, P. Estudio experimental de tomografía GNSS en Lisboa (Portugal). Física De La Tierra 2014, 26. [Google Scholar] [CrossRef]
- Heublein, M.; Zhu, X.X.; Alshawaf, F.; Mayer, M.; Bamler, R.; Hinz, S. Compressive sensing for neutrospheric water vapor tomography using GNSS and InSAR observations. In Proceedings of the International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 5268–5271. [Google Scholar]
- Yao, Y.; Zhao, Q. Maximally Using GPS Observation for Water Vapor Tomography. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7185–7196. [Google Scholar] [CrossRef]
- Benevides, P.; Nico, G.; Catalao, J.; Miranda, P.M.A. Bridging InSAR and GPS Tomography: A New Differential Geometrical Constraint. IEEE Trans. Geosci. Remote Sens. 2016, 54, 697–702. [Google Scholar] [CrossRef]
- Benevides, P.; Catalao, J.; Nico, G.; Miranda, P.M.A. 4D wet refractivity estimation in the atmosphere using GNSS tomography initialized by radiosonde and AIRS measurements: Results from a 1-week intensive campaign. GPS Solut. 2018, 22, 91. [Google Scholar] [CrossRef]
- Trzcina, E.; Rohm, W. Estimation of 3D wet refractivity by tomography, combining GNSS and NWP data: First results from assimilation of wet refractivity into NWP. Q. J. R. Meteorol. Soc. 2019, 145, 1034–1051. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, S.; Nan, D.; Pengxu, M. An improved tropospheric tomography method based on the dynamic node parametrized algorithm. Acta Geodyn. Geomater. 2020, 191–206. [Google Scholar] [CrossRef]
- Rohm, W. The ground GNSS tomography–unconstrained approach. Adv. Space Res. 2013, 51, 501–513. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, Y.; Yao, W. Troposphere Water Vapour Tomography: A Horizontal Parameterised Approach. Remote Sens. 2018, 10, 1241. [Google Scholar] [CrossRef]
- Song, S.; Zhu, W.; Ding, J.; Peng, J. 3D water-vapor tomography with Shanghai GPS network to improve forecasted moisture field. Chin. Sci. Bull. 2006, 51, 607–614. [Google Scholar] [CrossRef]
- Xia, P.; Cai, C.; Liu, Z. GNSS troposphere tomography based on two-step reconstructions using GPS observations and COSMIC profiles. Ann. Geophys. 2013, 31, 1805–1815. [Google Scholar] [CrossRef]
- Benevides, P.; Nico, G.; Catalao, J.; Miranda, P.M.A. Analysis of Galileo and GPS Integration for GNSS Tomography. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1936–1943. [Google Scholar] [CrossRef]
- Dong, Z.; Jin, S. 3-D Water Vapor Tomography in Wuhan from GPS, BDS and GLONASS Observations. Remote Sens. 2018, 10, 62. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, Y.; Cao, X.; Zhou, F.; Xia, P. An Optimal Tropospheric Tomography Method Based on the Multi-GNSS Observations. Remote Sens. 2018, 10, 234. [Google Scholar] [CrossRef]
- Heublein, M.; Alshawaf, F.; Erdnüß, B.; Zhu, X.X.; Hinz, S. Compressive sensing reconstruction of 3D wet refractivity based on GNSS and InSAR observations. J. Geod. 2019, 93, 197–217. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhang, K.; Yao, Y.; Li, X. A new troposphere tomography algorithm with a truncation factor model (TFM) for GNSS networks. GPS Solut. 2019, 23, 64. [Google Scholar] [CrossRef]
- Landskron, D.; Böhm, J. Refined discrete and empirical horizontal gradients in VLBI analysis. J. Geod. 2018, 92, 1387–1399. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Li, Z.; Penna, N.T.; Crippa, P. Generic Atmospheric Correction Model for Interferometric Synthetic Aperture Radar Observations. J. Geophys. Res. Solid Earth 2018, 123, 9202–9222. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology remote sensing of atmospheric water vapor using global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Gardner, S.C. Effects of horizontal refractivity gradients on the accuracy of laser ranging to satellites. Radio Sci. 1977, 11, 1037–1044. [Google Scholar] [CrossRef]
- Boehm, J.; Schuh, H. Troposphere gradients from the ECMWF in VLBI analysis. J. Geod. 2007, 81, 403–408. [Google Scholar] [CrossRef]
- Chen, G.; Herring, T.A. Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data. J. Geophys. Res. Atmos. 1997, 102, 20489. [Google Scholar] [CrossRef]
- Alber, C.; Ware, R.; Rocken, C.; Braun, J. Obtaining single path phase delays from GPS double differences. Geophys. Res. Lett. 2000, 27, 2661–2664. [Google Scholar] [CrossRef]
- Davis, J.L.; Herring, T.A.; Shapiro, I.I.; Rogers, A.E.E.; Elgered, G. Geodesy by Radio Interferometry: Effects of Atmospheric Modeling Errors on Estimates of Baseline Length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Chen, B.Y.; Liu, Z.Z. Voxel-optimized regional water vapor tomography and comparison with radiosonde and numerical weather model. J. Geod. 2014, 88, 691–703. [Google Scholar] [CrossRef]
- Perler, D.; Geiger, A.; Hurter, F. 4D GPS water vapor tomography: New parameterized approaches. J. Geod. 2011, 85, 539–550. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Z. Global water vapor variability and trend from the latest 36 year (1979 to 2014) data of ECMWF and NCEP reanalyses, radiosonde, GPS, and microwave satellite. J. Geophys. Res. Atmos. 2016, 121, 442–411, 462. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, W.; Yao, Y.; Li, X. An improved GNSS tropospheric tomography method with the GPT2w model. GPS Solut. 2020, 24, 60. [Google Scholar] [CrossRef]
- Nilsson, T.; Böhm, J.; Wijaya, D.D.; Tresch, A.; Schuh, H. Path Delays in the Neutral Atmosphere; Springer: Berlin, Germany, 2013. [Google Scholar]
- Ding, N.; Zhang, S.B.; Wu, S.Q.; Wang, X.M.; Zhang, K.F. Adaptive Node Parameterization for Dynamic Determination of Boundaries and Nodes of GNSS Tomographic Models. J. Geophys. Res. Atmos. 2018, 123, 1990–2003. [Google Scholar] [CrossRef]
- Möller, G.; Landskron, D. Atmospheric bending effects in GNSS tomography. Atmos. Meas. Tech. 2019, 12, 23–34. [Google Scholar] [CrossRef]
- Xia, P.; Ye, S.; Jiang, P.; Pan, L.; Guo, M. Assessing water vapor tomography in Hong Kong with improved vertical and horizontal constraints. In Annales Geophysicae; Copernicus GmbH: Göttingen, Germnay, 2018; pp. 1–28. [Google Scholar] [CrossRef]
- Xiaoying, W.; Ziqiang, D.; Enhong, Z.; Fuyang, K.E.; Yunchang, C.; Lianchun, S. Tropospheric wet refractivity tomography using multiplicative algebraic reconstruction technique. Adv. Space Res. 2013, 53, 156–162. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction. J. Geod. 1972, 105, 279–298. [Google Scholar] [CrossRef]
- Boehm, J.; Schuh, H. Vienna mapping functions in VLBI analyses. Geophys. Res. Lett. 2004, 31, 277. [Google Scholar] [CrossRef]
- Ding, N.; Zhang, S.; Wu, S.; Wang, X.; Kealy, A.; Zhang, K. A new approach for GNSS tomography from a few GNSS stations. Atmos. Meas. Tech. 2018, 11, 3511–3522. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Month | ||||
|---|---|---|---|---|
| January | 1.093 | −0.044 | −0.184 | −1.305 |
| February | 1.090 | −0.042 | −0.176 | −1.351 |
| March | 1.122 | −0.053 | −0.220 | −1.155 |
| April | 1.132 | −0.060 | −0.213 | −1.133 |
| May | 1.117 | −0.048 | −0.206 | −1.054 |
| June | 1.181 | −0.070 | −0.264 | −0.911 |
| July | 1.089 | −0.041 | −0.153 | −1.126 |
| August | 1.121 | −0.051 | −0.191 | −1.019 |
| September | 1.088 | −0.040 | −0.158 | −1.165 |
| October | 1.119 | −0.053 | −0.199 | −1.130 |
| November | 1.089 | −0.042 | −0.172 | −1.255 |
| December | 1.053 | −0.026 | −0.125 | −1.516 |
| Scheme | Range | Voxel Division | Total Numbers |
|---|---|---|---|
| Scheme East | 113.82°E~114.18°E; 22.16°N~22.56°N | 300 | |
| Scheme West | 114.09°E~114.36°E; 22.16°N~22.56°N | 225 | |
| Scheme South | 113.82°E~114.36°E; 22.32°N~22.56°N | 270 | |
| Scheme North | 113.82°E~114.36°E; 22.16°N~22.40°N | 270 |
| Scheme | Data | RMSE | STD | Bias |
|---|---|---|---|---|
| Scheme East | Integral only | 13.08 | 12.83 | −0.33 |
| Integral+inside | 9.97 | 9.49 | −0.17 | |
| Scheme West | Integral only | 12.05 | 11.55 | −0.29 |
| Integral+inside | 9.50 | 9.36 | −0.25 | |
| Scheme South | Integral only | 13.69 | 13.26 | −0.25 |
| Integral+inside | 11.09 | 10.64 | −0.24 | |
| Scheme North | Integral only | 10.46 | 10.39 | −0.27 |
| Integral+inside | 9.19 | 9.04 | −0.14 |
| Scheme | Data | RMSE | STD |
|---|---|---|---|
| Scheme East | Integral only | 1.60 | 1.59 |
| Integral+inside | 1.07 | 1.06 | |
| Scheme West | Integral only | 1.62 | 1.61 |
| Integral+inside | 1.12 | 1.08 | |
| Scheme South | Integral only | 1.66 | 1.64 |
| Integral+inside | 1.34 | 1.33 | |
| Scheme North | Integral only | 1.63 | 1.61 |
| Integral+inside | 1.13 | 1.11 |
| Model | RMSE | R-Square | ||
|---|---|---|---|---|
| Yao model | 2.233 | −1.119 | 0.9882 | 0.0145 |
| Scheme | RMSE | STD | Bias | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Max. | Min. | Mean | Max. | Min. | Mean | Max. | Min. | Mean | |
| Scheme I | 3.36 | 0.50 | 1.59 | 3.37 | 0.45 | 1.60 | 0.55 | −1.26 | −0.26 |
| Scheme II | 2.42 | 0.40 | 1.28 | 2.30 | 0.41 | 1.25 | 0.66 | −1.33 | −0.14 |
| Scheme III | 1.98 | 0.28 | 1.08 | 2.00 | 0.29 | 1.07 | 0.87 | −0.55 | 0.16 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Zhang, S.; Ding, N.; Zhao, Q. A Tropospheric Tomography Method with a Novel Height Factor Model Including Two Parts: Isotropic and Anisotropic Height Factors. Remote Sens. 2020, 12, 1848. https://doi.org/10.3390/rs12111848
Zhang W, Zhang S, Ding N, Zhao Q. A Tropospheric Tomography Method with a Novel Height Factor Model Including Two Parts: Isotropic and Anisotropic Height Factors. Remote Sensing. 2020; 12(11):1848. https://doi.org/10.3390/rs12111848
Chicago/Turabian StyleZhang, Wenyuan, Shubi Zhang, Nan Ding, and Qingzhi Zhao. 2020. "A Tropospheric Tomography Method with a Novel Height Factor Model Including Two Parts: Isotropic and Anisotropic Height Factors" Remote Sensing 12, no. 11: 1848. https://doi.org/10.3390/rs12111848
APA StyleZhang, W., Zhang, S., Ding, N., & Zhao, Q. (2020). A Tropospheric Tomography Method with a Novel Height Factor Model Including Two Parts: Isotropic and Anisotropic Height Factors. Remote Sensing, 12(11), 1848. https://doi.org/10.3390/rs12111848