Uncertainty Analysis for RadCalNet Instrumented Test Sites Using the Baotou Sites BTCN and BSCN as Examples

 ,
,
Abstract
1. Introduction
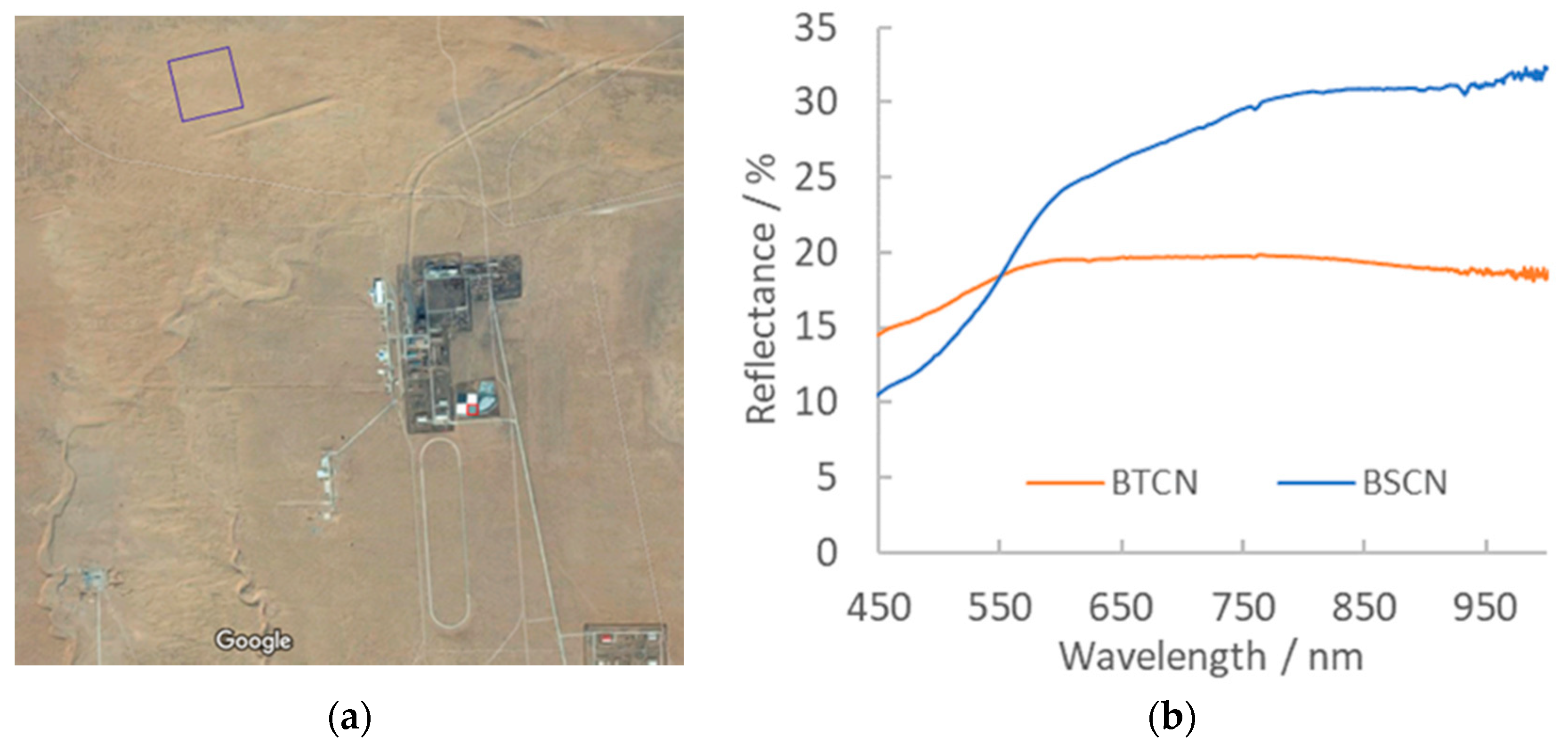
2. The Baotou RadCalNet Sites
2.1. Grey Permanent Artificial Target and Sandy Site
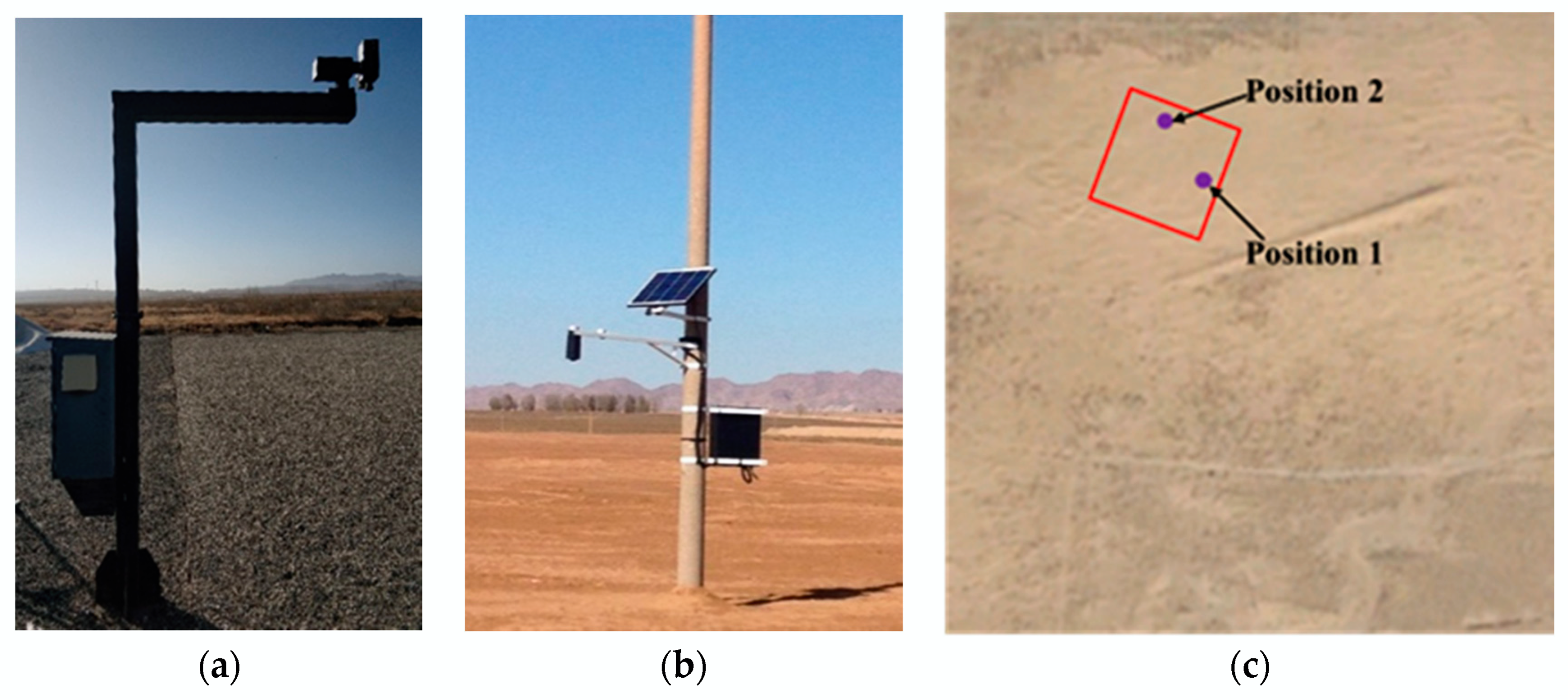
2.2. Site Instrumentation for RadCalNet
3. Methods
3.1. A Metrological Approach
3.2. Traceability for Ground and Top-of-Atmosphere Reflectance
3.2.1. Principles of Radiative Transfer
3.2.2. Overview of Traceability
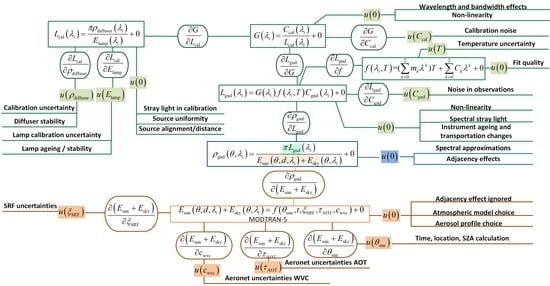
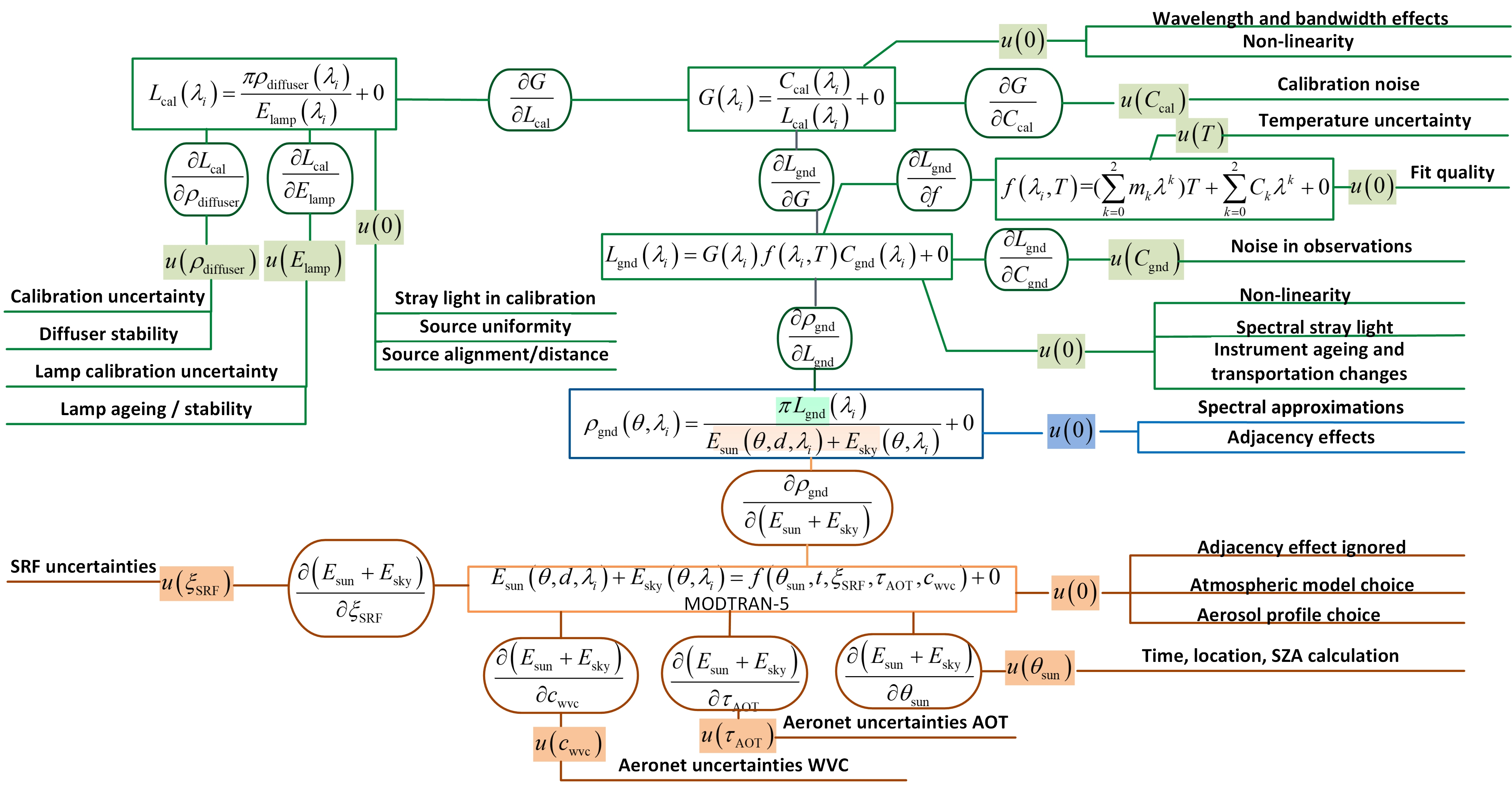
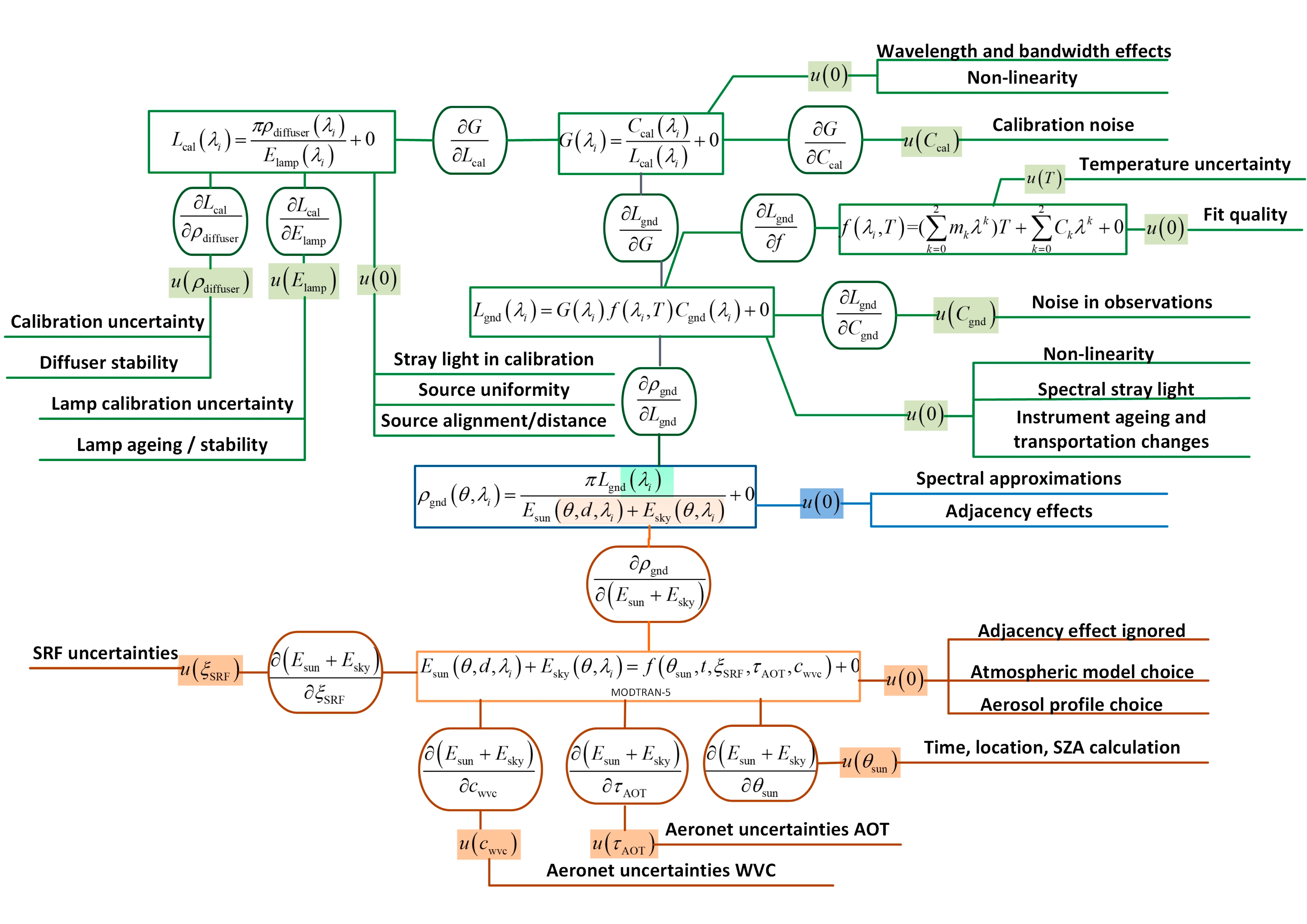
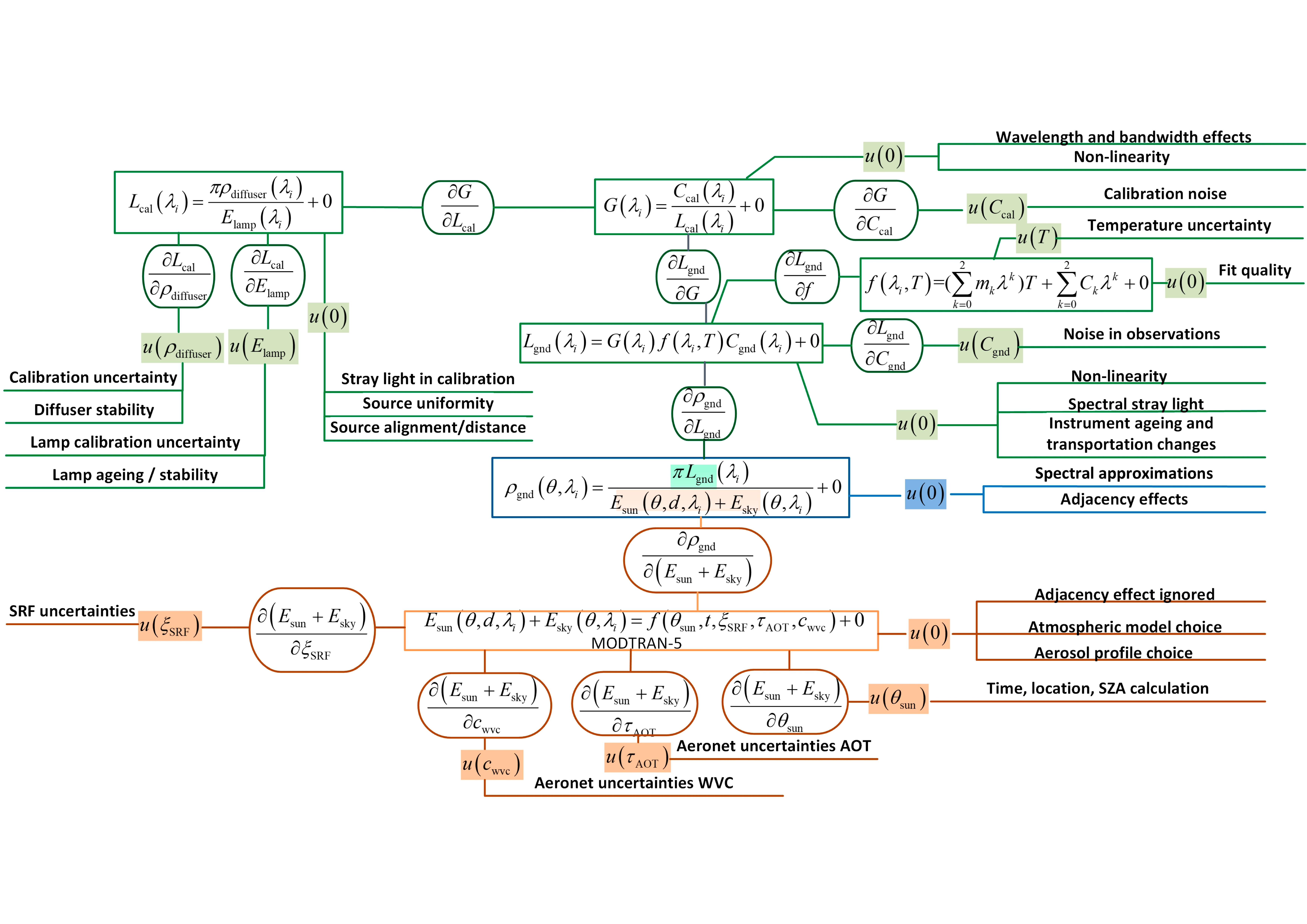
3.2.3. Uncertainty Tree Diagram
4. Results: Uncertainty Budget
4.1. Uncertainty Associated with Laboratory Calibration of the Field Spectrometer: Spectral Calibration
4.2. Uncertainty Associated with Laboratory Calibration of the Field Spectrometer: Radiometric Calibration
4.2.1. Lamp-Diffuser Panel Radiance
4.2.2. Source Non-Uniformity for Spectrometer Calibration
4.2.3. Combined Uncertainty Associated with Source Radiance
4.2.4. Spectrometer Noise during its Calibration
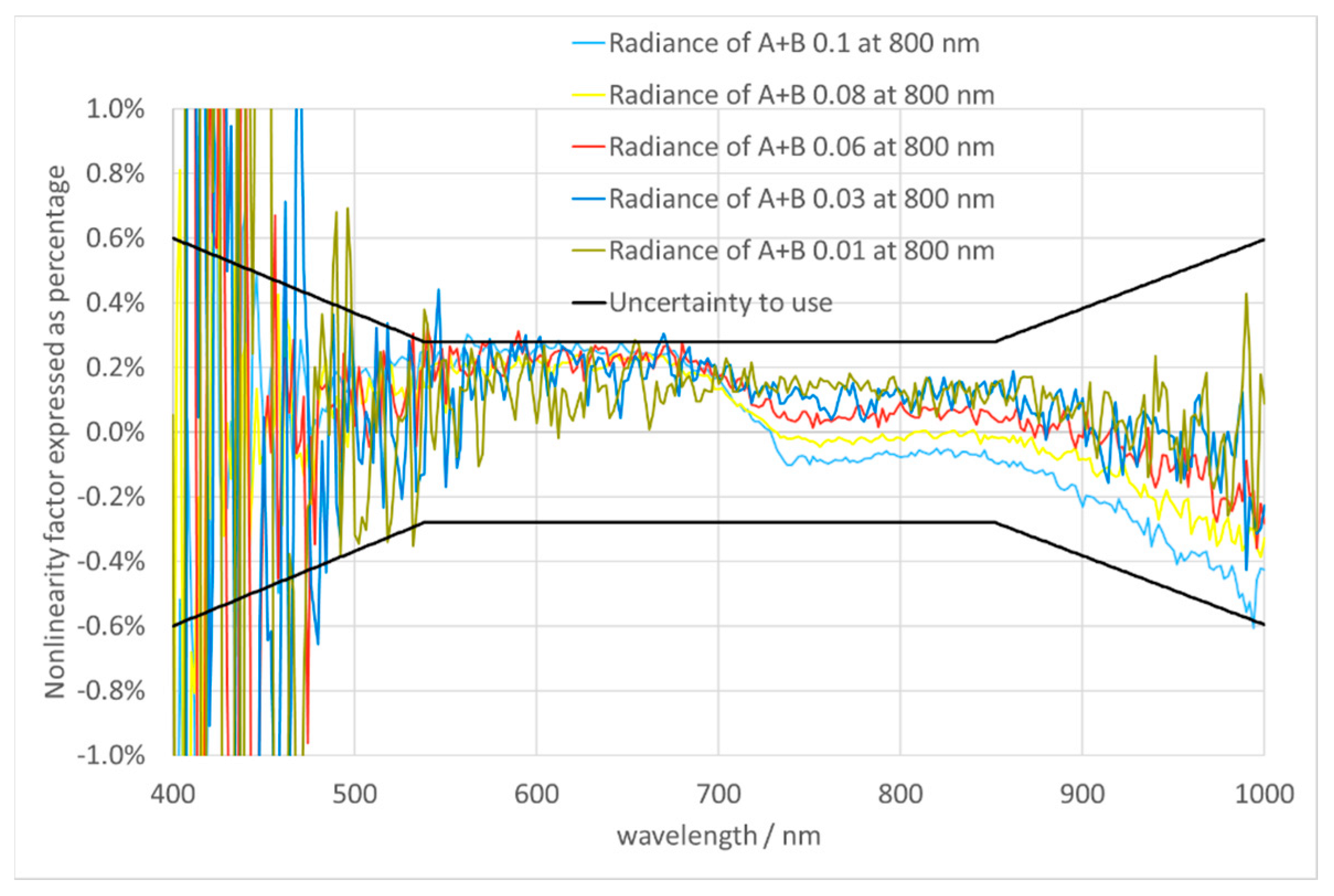
4.2.5. Spectrometer Nonlinearity
4.2.6. Stray Light during Calibration and Field Operation
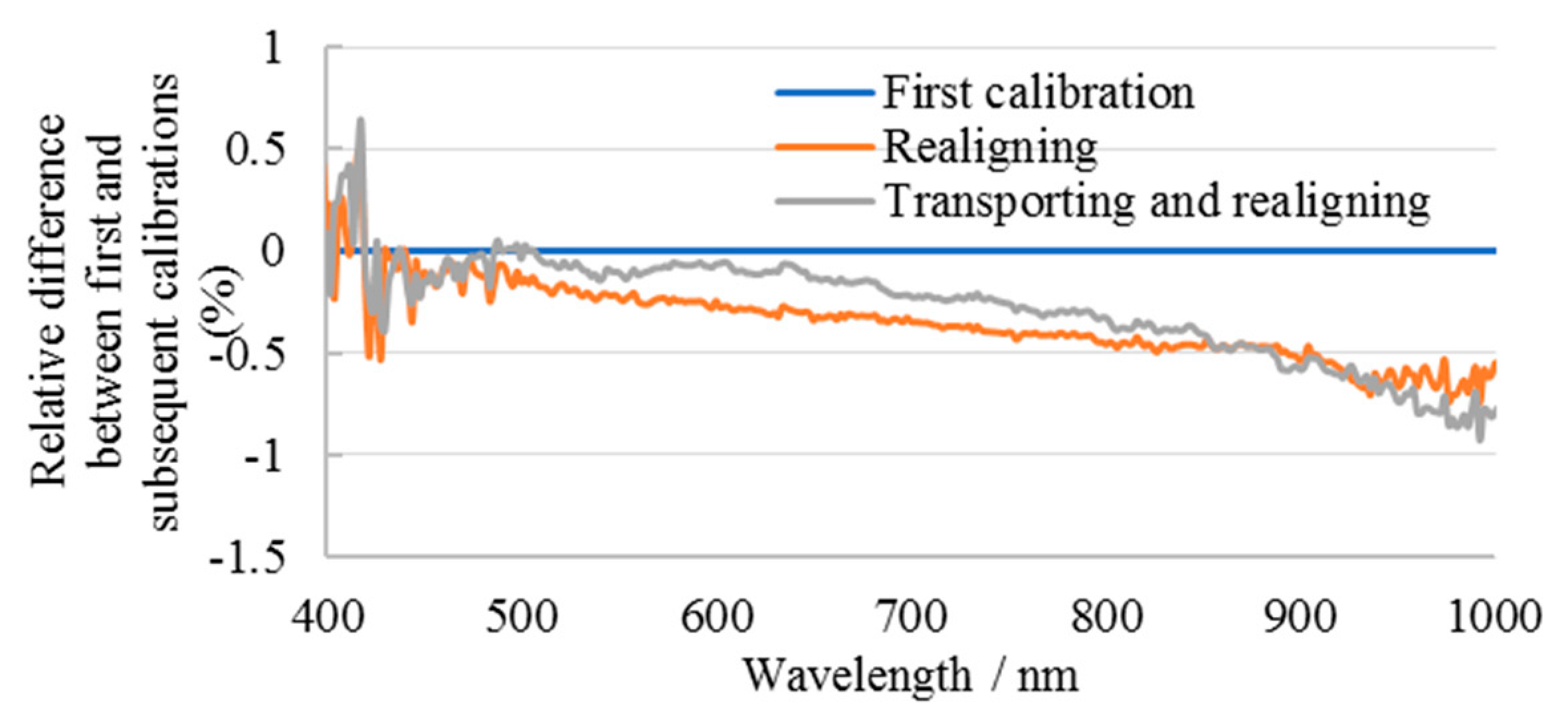
4.2.7. Repeatability of the Calibration/Transportation Stability
4.2.8. Combined Uncertainty Associated with the Laboratory Calibration of the Spectrometer
4.3. Uncertainty Associated with the Field Measurement of Radiance
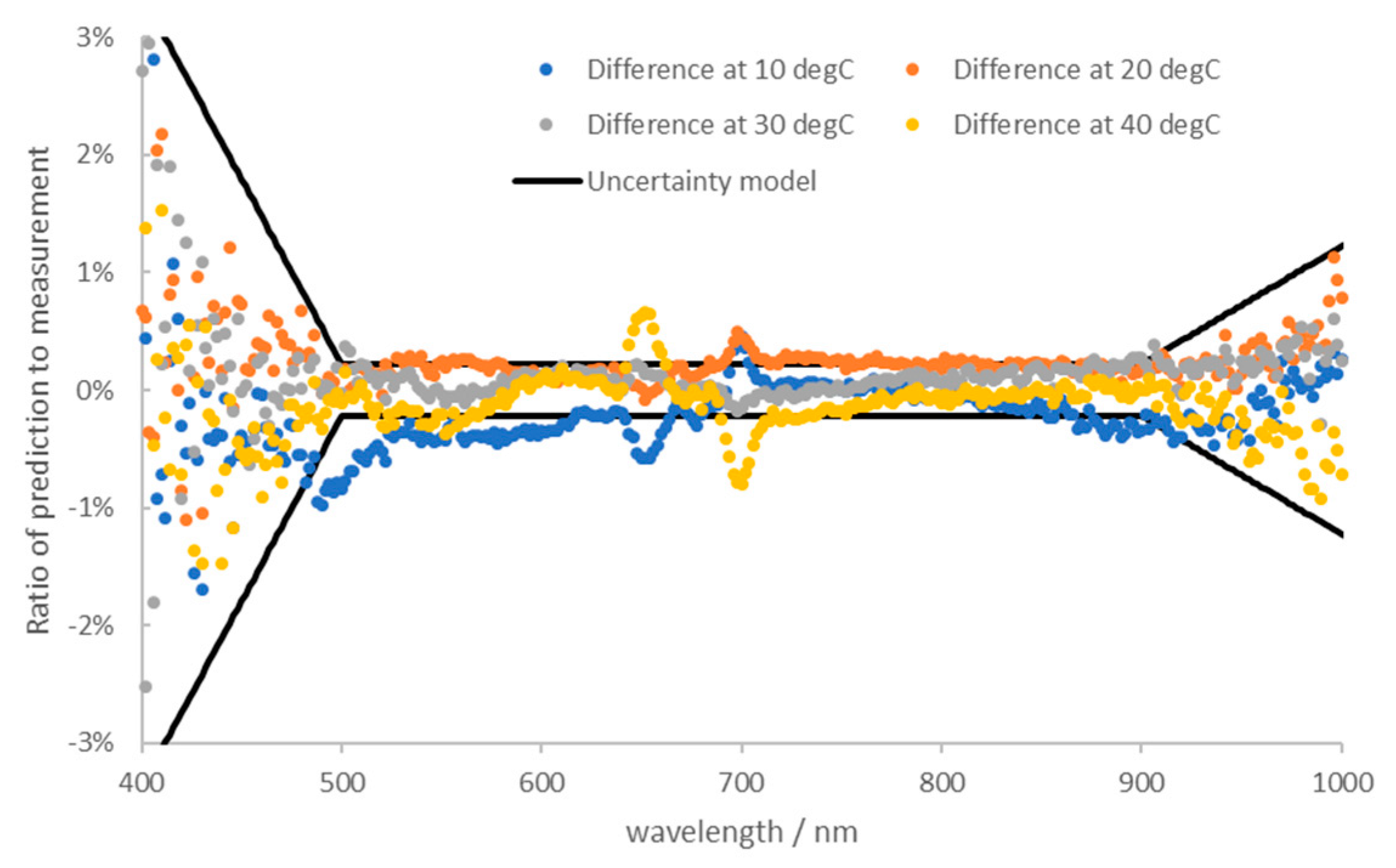
4.3.1. Spectrometer Temperature Stability
4.3.2. Noise in the Field Measurements
4.3.3. Combined Uncertainty Associated with the Field Measurement of Radiance
4.4. Uncertainty Associated with the Ground Reflectance
4.4.1. Atmospheric Measurements from the AERONET Sun Photometer
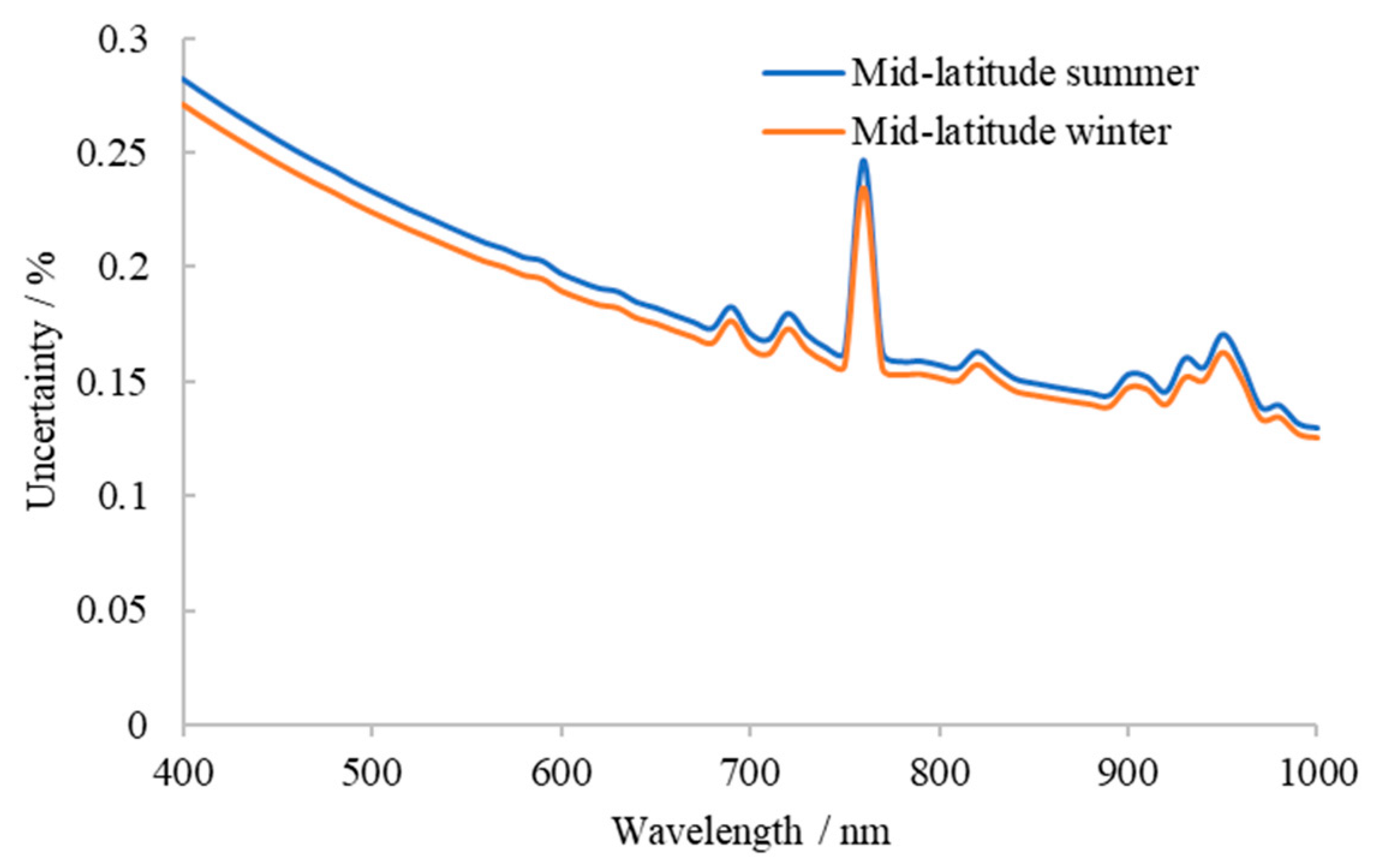
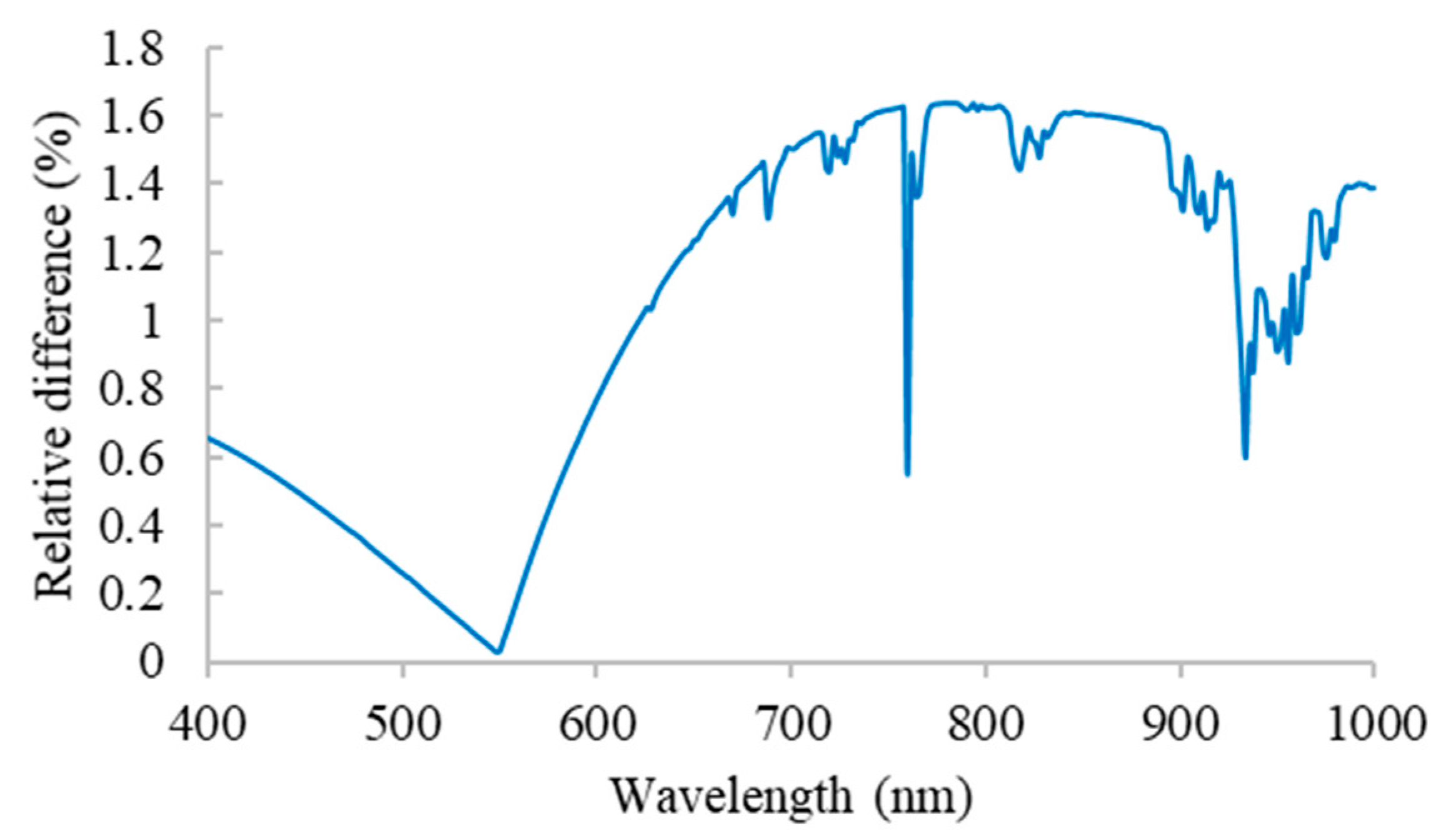
4.4.2. Sensitivity Analysis of MODTRAN-5 to Atmospheric Conditions
4.4.3. Other Uncertainties Associated with the MODTRAN-5 Processing
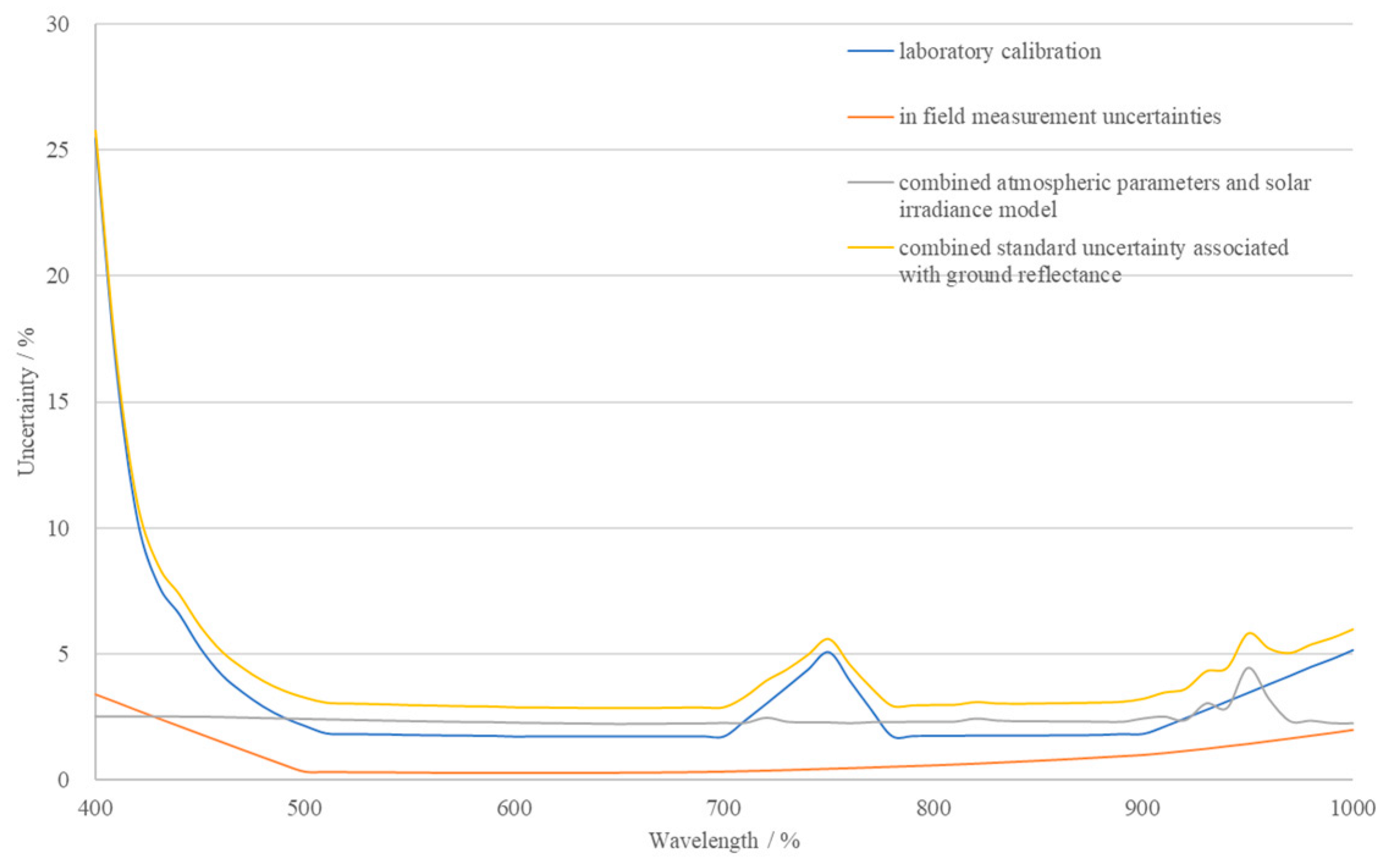
4.4.4. Combined Uncertainty Associated with Ground Spectral Reflectance
4.5. Uncertainty Associated with the RadCalNet BOA Reflectance Product
4.5.1. Wavelength Sampling
4.5.2. Representativeness (Site Homogeneity)
4.5.3. 30 Minute Temporal Averages
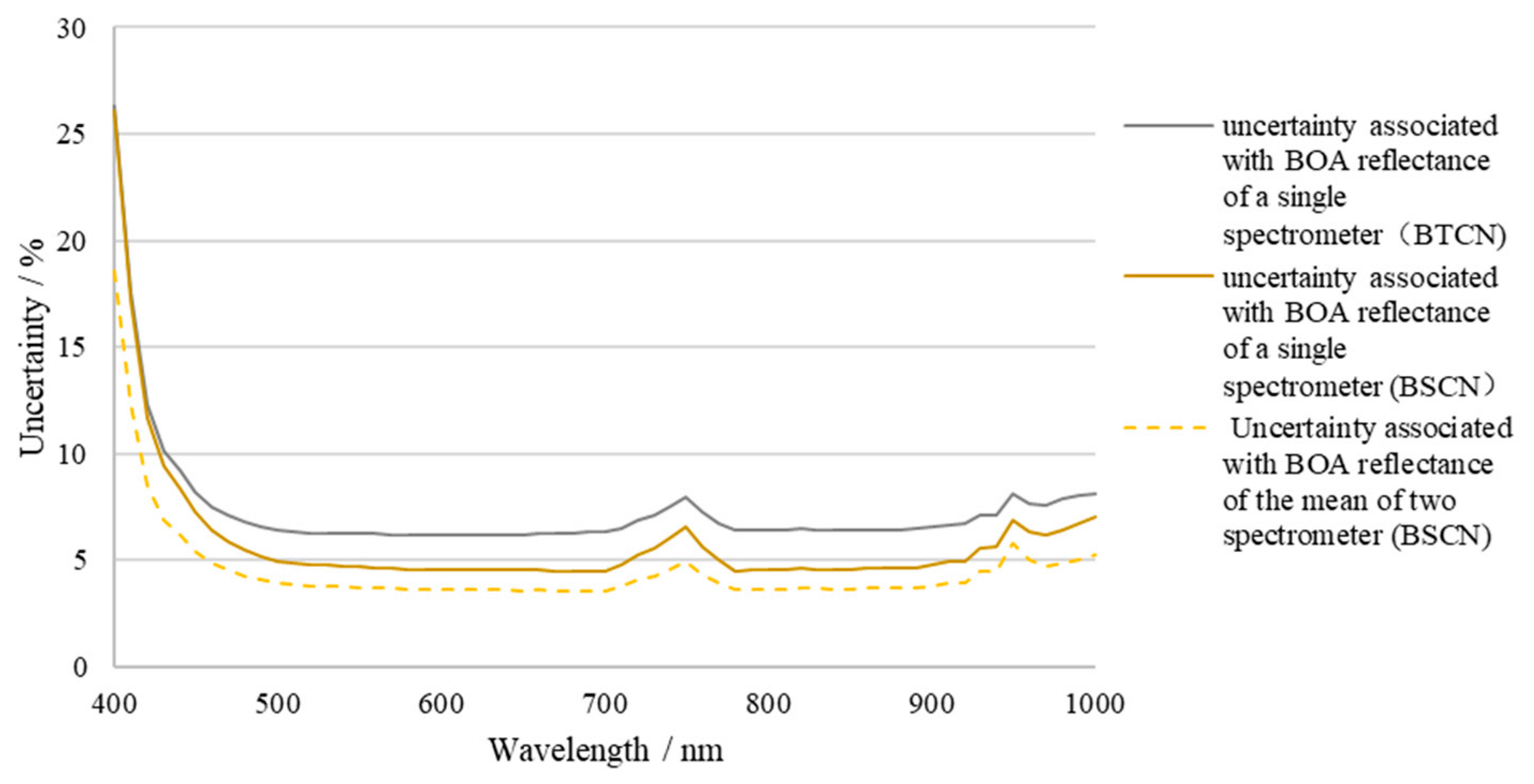
4.5.4. Uncertainty Associated with the BOA Reflectance
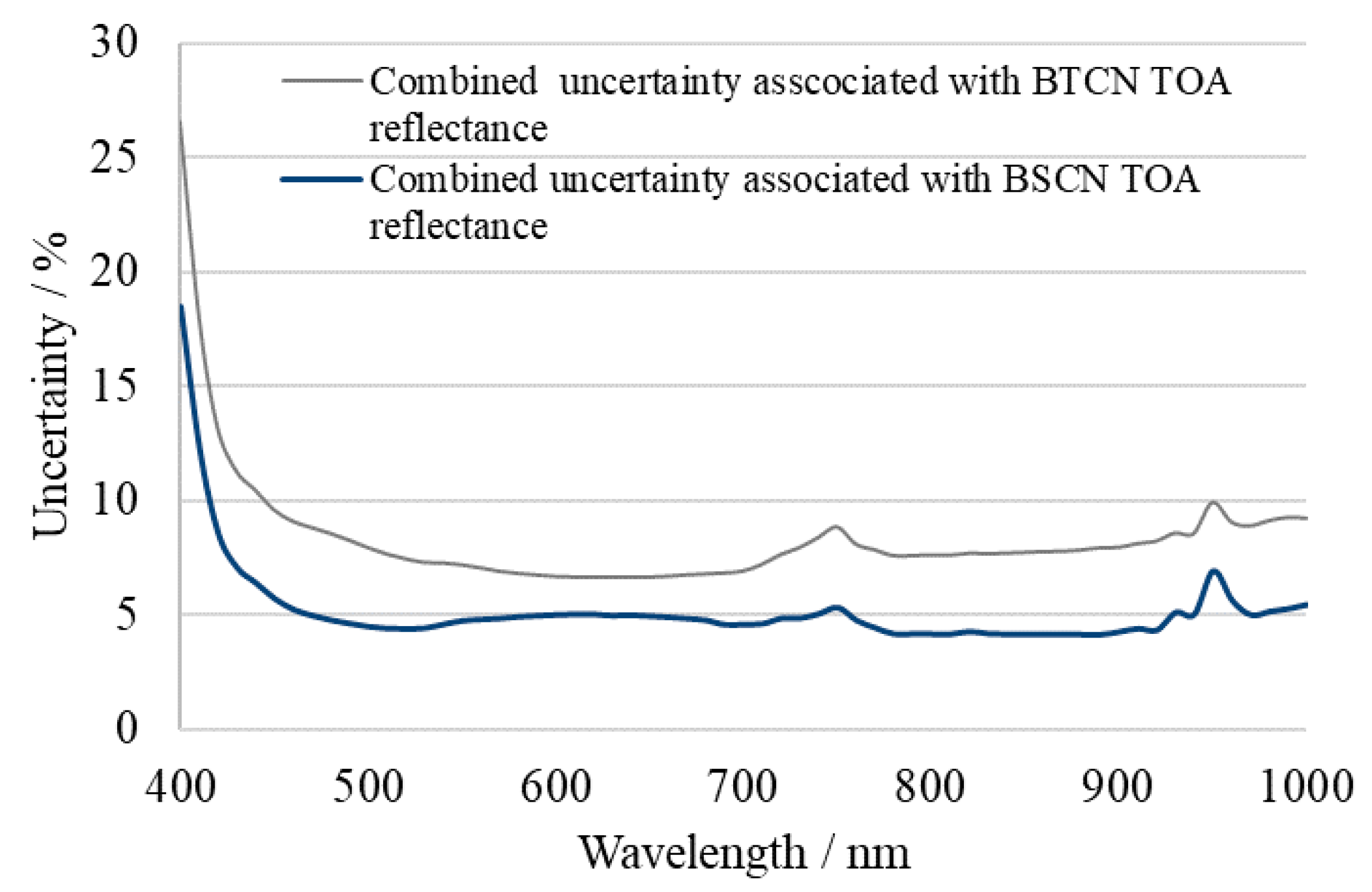
4.6. Uncertainty Associated with Propagation to TOA
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Uncertainty Tree Diagram for the Baotou Measurements of Ground Spectral Reflectance

Appendix B. Stray Light Effects
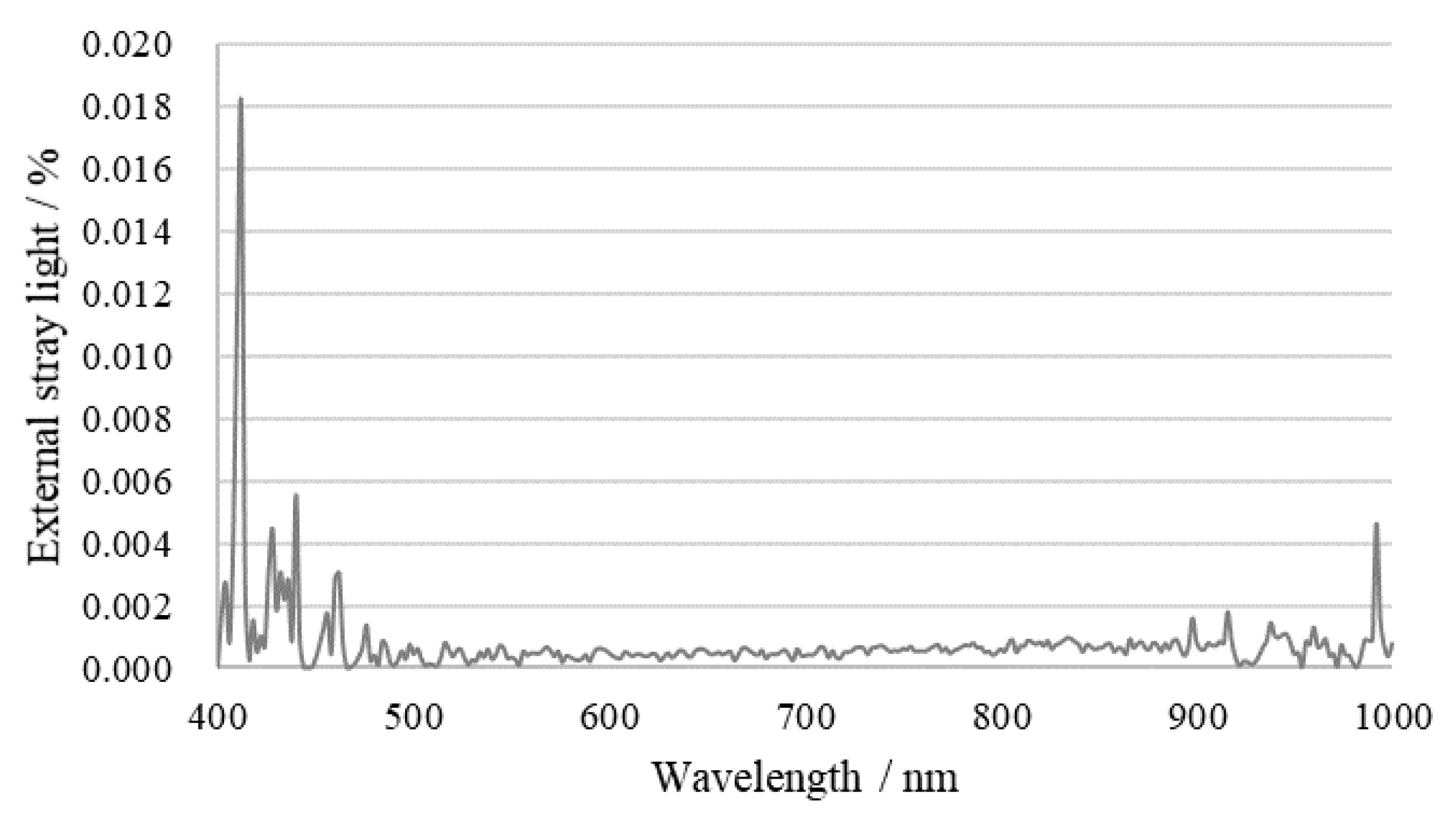
Appendix B.1. External Stray Light during Calibration

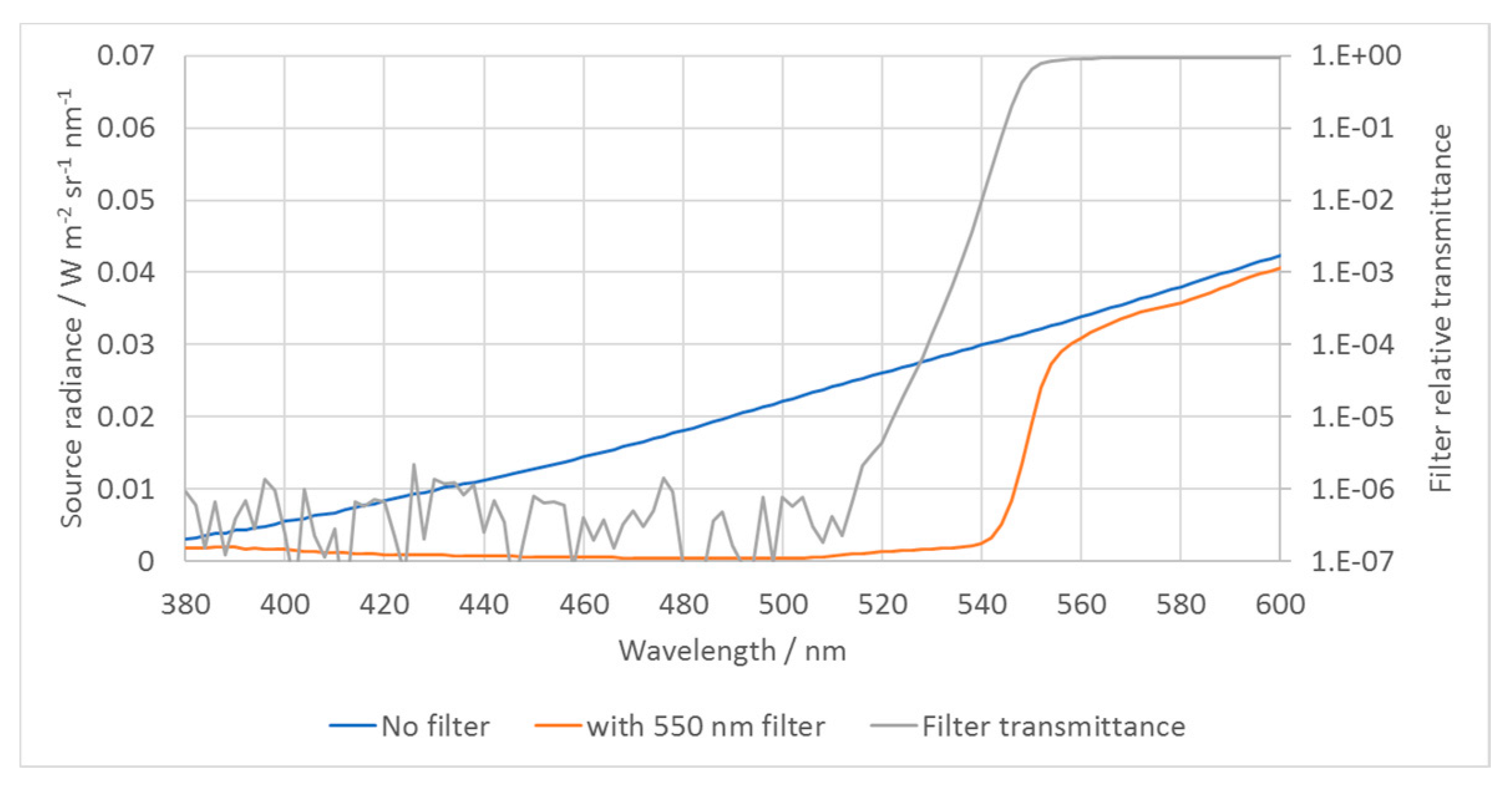
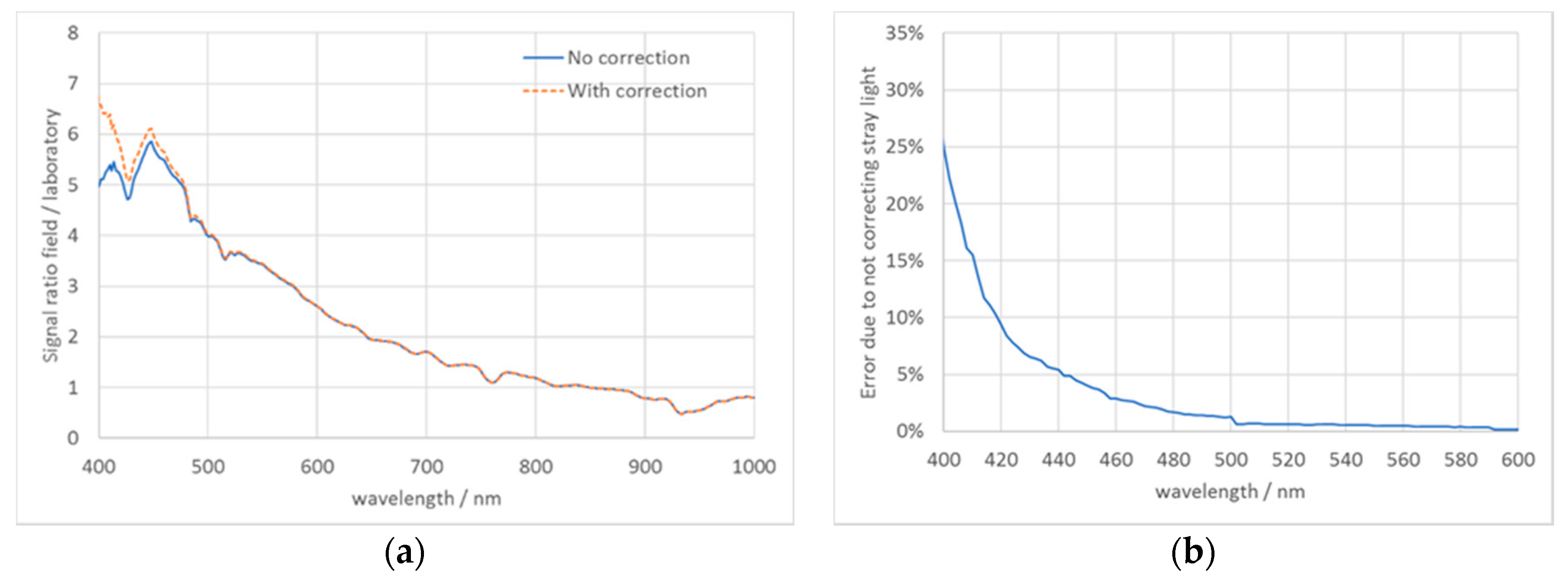
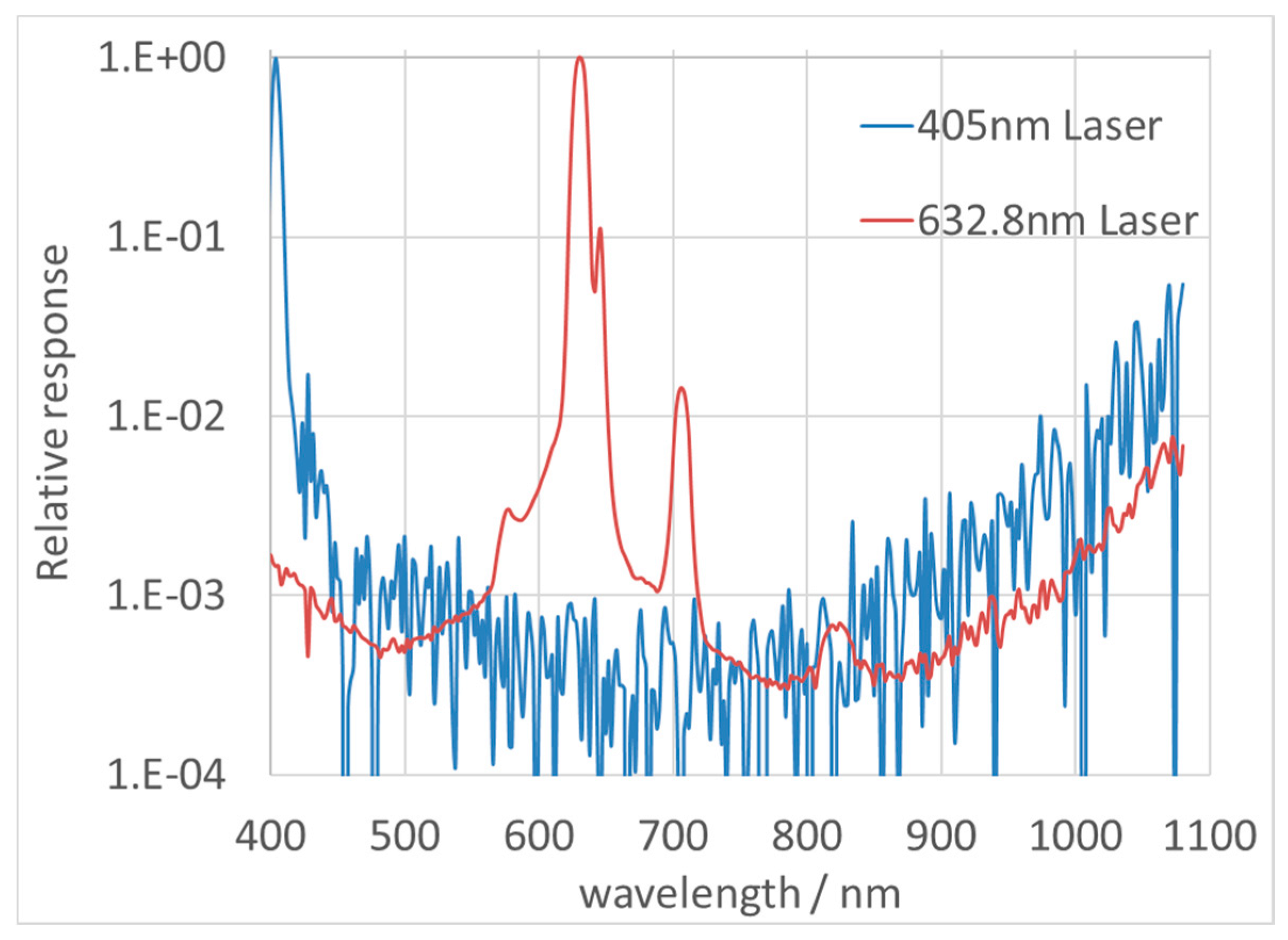
Appendix B.2. Internal (Spectral) Stray Light

Appendix B.2.1. Correction for Internal Stray Light
Appendix B.2.2. Experimental Values


Appendix B.3. More Sophisticated Stray Light Correction

Appendix C. Uncertainty Budget

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Effect | Error Correlation | Uncertainty Magnitude (%) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| All Measurements of a Single Spectrometer | Between Spectrometers | Between Wavelengths | 400 nm | 500 nm | 600 nm | 700 nm | 800 nm | 900 nm | 1000 nm | |
| Lamp Irradiance Calibration | FC | FC | PC | 0.42 | 0.35 | 0.31 | 0.29 | 0.29 | 0.30 | 0.31 |
| Lamp Ageing and Current Setting | FC | PC | FC | 0.29 | 0.23 | 0.20 | 0.17 | 0.17 | 0.29 | 0.32 |
| Diffuser Calibration | FC | FC | PC | 0.28 | 0.28 | 0.28 | 0.29 | 0.31 | 0.32 | 0.32 |
| Lamp-Diffuser Distance | FC | I | FC | 0.20 | 0.20 | 0.20 | 0.20 | 0.20 | 0.20 | 0.20 |
| Lamp-Diffuser Alignment | FC | I | FC | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 |
| Source Non-Uniformity | FC | FC | FC | 0.29 | 0.29 | 0.29 | 0.29 | 0.29 | 0.29 | 0.29 |
| Wavelength Accuracy | FC | I | PC | 5.00 | 1.5 | 1.50 | 1.50 | 1.50 | 1.50 | 5.00 |
| Spectrometer Noise | I | I | I | 0.10 | 0.10 | 0.10 | 0.10 | 0.10 | 0.10 | 0.10 |
| Spectrometer Nonlinearity | FC | I | FC | 0.60 | 0.37 | 0.28 | 0.28 | 0.28 | 0.38 | 0.60 |
| Internal Stray Light | FC | I | FC | 25 | 1.30 | 0.20 | 0.10 | 0.10 | 0.10 | 0.10 |
| External Stray Light | FC | FC | FC | 0.10 | 0.10 | 0.10 | 0.10 | 0.10 | 0.10 | 0.10 |
| Calibration Repeatability | FC | I | FC | 0.12 | 0.15 | 0.24 | 0.34 | 0.46 | 0.58 | 0.79 |
| Noise during Field Measurement | I | I | I | 0.41 | 0.19 | 0.12 | 0.11 | 0.19 | 0.20 | 0.28 |
| Spectrometer Temperature Sensitivity | FC | I | PC | 3.38 | 0.25 | 0.23 | 0.30 | 0.54 | 0.96 | 1.97 |
| Solar Irradiance Model | I | FC | FC | 1.50 | 1.35 | 1.05 | 0.95 | 1.05 | 1.05 | 0.95 |
| MODTRAN | PC | FC | FC | 2.00 | 2.00 | 2.00 | 2.00 | 2.00 | 2.00 | 2.00 |
| AOT | PC | FC | FC | 0.28 | 0.23 | 0.20 | 0.17 | 0.16 | 0.15 | 0.13 |
| WVC | PC | FC | FC | 0.10 | 0.10 | 0.03 | 0.18 | 0.12 | 0.84 | 0.03 |
| Aerosol Model | PC | FC | FC | 0.19 | 0.08 | 0.22 | 0.43 | 0.47 | 0.39 | 0.40 |
| Representativeness of the Point Measurement (BTCN) | FC | I | FC | 5.42 | 5.54 | 5.48 | 5.60 | 5.65 | 5.71 | 5.52 |
| Representativeness of the Point Measurement (BSCN) | FC | I | FC | 4.09 | 3.76 | 3.52 | 3.45 | 3.42 | 3.50 | 3.67 |
References
- Slater, P.N.; Biggar, S.F.; Holm, R.G.; Jackson, R.D.; Mao, Y.; Moran, M.S.; Palmer, J.M.; Yuan, B. Reflectanceand radiance-based methods for the in-flight absolute calibration of multi-spectral sensors. Remote Sens. Environ. 1987, 22, 11c37. [Google Scholar] [CrossRef]
- Meygret, A.; Santer, R.; Berthelot, B. ROSAS: A robotic station for atmosphere and surface characterization dedicated to on-orbit calibration. In Proceedings of the Earth Observing Systems XVI, San Diego, CA, USA, 13 September 2011. [Google Scholar]
- Thome, K.J.; Catrall, C.; Amico, J.D.; Geis, J. Ground-reference calibration results for Landsat-7 ETM+. In Proceedings of the SPIE Conference #5882, Earth Observing Systems X, San Diego, CA, USA, 31 July–4 August 2005. [Google Scholar]
- Bouvet, M.; Thome, K.; Berthelot, B.; Bialek, A.; Czapla-Myers, J.; Fox, N.P.; Goryl, P.; Henry, P.; Ma, L.; Marcq, S.; et al. RadCalNet: A Radiometric Calibration Network for Earth Observing Imagers Operating in the Visible to Shortwave Infrared Spectral Range. Remote Sens. 2019, 11, 2401. [Google Scholar] [CrossRef]
- RadCalNet Portal. Available online: www.radcalnet.org (accessed on 25 May 2020).
- QA4EO Portal. Available online: www.qa4eo.org (accessed on 25 May 2020).
- JCGM. GUM 2008 JCGM 100:2008. Guide to the Expression of Uncertainty in Measurement (JCGM); BIPM: Sevres, France, 2008; p. 100. Available online: www.bipm.org (accessed on 25 May 2020).
- Li, C.; Ma, L.L.; Gao, C.X.; Wang, N.; Liu, Y.K.; Zhang, D.D.; Tang, L.; Liu, X.; Zhao, Y.; Dou, S. Permanent target for optical payload performance and data quality assessment: Spectral characterization and a case study for calibration. J. Appl. Remote Sens. 2014, 8, 083498. [Google Scholar] [CrossRef]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanré, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.J.; Nakajima, T.; et al. Aeronet—A federated instrument network and data archive for aerosol characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- AERONET Website. Available online: https://aeronet.gsfc.nasa.gov/ (accessed on 25 May 2020).
- Mittaz, J.; Merchant, C.J.; Woolliams, E.R. Applying principles of metrology to historical Earth observations from satellites. Metrologia 2019, 56, 032002. [Google Scholar] [CrossRef]
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Chetwynd, J.H.; Borel, C.C.; Lewis, P.E. Modtran 5: A reformulated atmospheric band model with auxiliary species and practical multiple scattering options: Update. In Proceedings of the SPIE, the International Society for Optical Engineering, Boston, MA, USA, 23–25 OCtober 2005; Volume 5806, pp. 662–667. [Google Scholar]
- Schaepman-Strub, G.; Schaepman, M.E.; Painter, T.H.; Dangel, S.; Martonchik, J.V. Reflectance quantities in optical remote sensing—Definitions and case studies. Remote Sens. Environ. 2006, 103, 27–42. [Google Scholar] [CrossRef]
- Dai, C.H.; Khlevnoy, B.; Wu, Z.F.; Wang, Y.F.; Li, L.L. Bilateral comparison of spectral irradiance between NIM and VNIIOFI from 250 to 2500 nm. MAPAN 2017, 32, 243–250. [Google Scholar] [CrossRef]
- Thuillier, G.; Hersé, M.; Labs, D.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.C.; Mandel, H. The solar spectral irradiance from 200 to 2400 nm, as measured by the SOLSPEC spectrometer from the Atlas and Eureca Missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- Barbrow, L.E. International Lighting Vocabulary. J. Smpte 1964, 73, 331–332. [Google Scholar] [CrossRef]
- Salim, S.; Fox, N.; Theocharous, E.; Sun, T.; Grattan, T.V. Temperature and nonlinearity corrections for a photodiode array spectrometer used in the field. Appl. Opt. 2011, 50, 866–875. [Google Scholar] [CrossRef] [PubMed]
- Reagan, J.A.; Thome, K.; Herman, B.; Gall, R. Water vapor measurements in the 0.94 micron absorption band—Calibration, measurements and data applications. J. Mol. Spectrosc. 2015, 68, 329–330. [Google Scholar]
- Sinyuk, A.; Holben, B.N.; Smirnov, A.; Eck, T.F.; Slutsker, I.; Schafer, J.S.; Giles, D.M.; Sorokin, M. Assessment of error in aerosol optical depth measured by AERONET due to aerosol forward scattering. Geophys. Res. Lett. 2012, 39, L23806. [Google Scholar] [CrossRef]
- Berk, A.; Anderson, G.P.; Acharya, P.K. MODTRAN® 5.2. 2 User’s Manual 2011; Spectral Sciences Inc.: Burlington, MA, USA, 2011; Volume 69. [Google Scholar]
- Thuillier, G.; Hersé, M.L.; Simon, P.C.; Labs, D.; Mandel, H.; Gillotay, D.; Foujols, T. The visible solar spectral irradiance from 350 to 850 nm as measured by the SOLSPEC spectrometer during the atlas I mission. Sol. Phys. 1998, 177, 41–61. [Google Scholar] [CrossRef]
- Otterman, J.; Fraser, R.S. Adjacency effects on imaging by surface reflection and atmospheric scattering: Cross radiance to zenith. Appl. Opt. 1979, 18, 2852–2860. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.L.; Wang, N.; Zhao, Y.G.; Liu, Y.K.; Han, Q.J.; Wang, X.H.; Woolliams, E.R.; Gao, C.X.; Bouvet, M.; Li, C.R.; et al. An improved vicarious radiometric calibration method considering the adjacency effect for high Resolution optical sensors. IEEE Trans. Geosci. Remote Sens. 2019. under-review. [Google Scholar]
- Gorroño, J.; Hunt, S.; Scanlon, T.; Banks, A.; Fox, N.; Woolliams, E.R.; Underwood, C.; Gascon, F.; Peters, M.; Fomferra, N.; et al. Providing uncertainty estimates of the Sentinel-2 top-of-atmosphere measurements for radiometric validation activities. Eur. J. Remote Sens. 2018, 51, 650–666. [Google Scholar] [CrossRef]
- Zong, Y.Q.; Brown, S.W.; Johnson, B.C.; Lykke, K.R.; Ohno, Y. Simple spectral stray light correction method for array spectroradiometers. Appl. Opt. 2006, 45, 1111–1119. [Google Scholar] [CrossRef] [PubMed]
- Nevas, S.; Sperling, A.; Oderkerk, B. Transferability of stray light corrections among array spectroradiometers. AIP Conf. Proc. 2013, 1531, 821–824. [Google Scholar]
- Nevas, S.; Wübbeler, G.; Sperling, A.; Elster, C.; Teuber, A. Simultaneous correction of bandpass and stray-light effects in array spectroradiometer data. Metrologia 2012, 49, S43. [Google Scholar] [CrossRef]
- Salim, S.G.R.; Fox, N.P.; Hartree, W.S.; Woolliams, E.R.; Sun, T.; Grattan, K.T.V. Stray light correction for diode-array-based spectrometers using a monochromator. Appl. Opt. 2011, 50, 5130–5138. [Google Scholar] [CrossRef] [PubMed]
















| Effect | Lamp Irradiance Calibration | Lamp Ageing and Current Setting | Diffuser Calibration | Lamp-Diffuser Distance | Lamp-Diffuser Alignment | Source Non-Uniformity | |
|---|---|---|---|---|---|---|---|
| Term affected | in Equation (2) | in Equation (2) | in Equation (2) | in Equation (2) | in Equation (2) | in Equation (2) | |
| Error correlation | All measurements of a single spectrometer | Fully correlated | Fully correlated | Fully correlated | Fully correlated | Fully correlated | Fully correlated |
| Between spectrometers | Fully correlated | Partially correlated 1 | Fully correlated | Independent | Independent | Fully correlated 2 | |
| Between wavelengths | Partially correlated 1 | Fully correlated | Partially correlated 3 | Fully correlated | Fully correlated | Fully correlated | |
| Uncertainty magnitude | 400 nm | 0.42% | 0.29% | 0.28% | 0.20% | 0.50% | 0.29% |
| 500 nm | 0.35% | 0.23% | 0.28% | 0.20% | 0.50% | 0.29% | |
| 600 nm | 0.31% | 0.20% | 0.28% | 0.20% | 0.50% | 0.29% | |
| 700 nm | 0.29% | 0.17% | 0.29% | 0.20% | 0.50% | 0.29% | |
| 800 nm | 0.29% | 0.17% | 0.31% | 0.20% | 0.50% | 0.29% | |
| 900 nm | 0.30% | 0.29% | 0.32% | 0.20% | 0.50% | 0.29% | |
| 1000 nm | 0.31% | 0.32% | 0.32% | 0.20% | 0.50% | 0.29% |
| Effect | Source Radiance | Wavelength Accuracy | Spectrometer Noise | |
| Term affected | in Equation (2) | in Equation (2) | in Equation (2) | |
| Error correlation | All measurements of a single spectrometer | Mixed. See Table 1 | Fully correlated | Independent |
| Between spectrometers | Mixed. See Table 1 | Independent | Independent | |
| Between wavelengths | Mixed. See Table 1 | Partially correlated | Independent | |
| Uncertainty magnitude | 400 nm | 0.84% | 5.00% | 0.10% |
| 500 nm | 0.79% | 1.50% | 0.1 0% | |
| 600 nm | 0.77% | 1.50% | 0.10% | |
| 700 nm | 0.76% | 1.50% | 0.10% | |
| 800 nm | 0.76% | 1.50% | 0.10% | |
| 900 nm | 0.81% | 1.50% | 0.10% | |
| 1000 nm | 0.82% | 5.0% | 0.10% | |
| Spectrometer Nonlinearity | Internal Stray Light | External Stray Light | Calibration Repeatability | |
| in Equation (2) | in Equation (2) | in Equation (2) | in Equation (2) | |
| Error correlation | Fully correlated | Fully correlated | Fully correlated | Fully correlated |
| Independent | Independent | Fully correlated | Independent | |
| Fully correlated | Fully correlated | Fully correlated | Fully correlated | |
| Uncertainty magnitude | 0.60% | 25% | 0.10% | 0.12% |
| 0.37% | 1.30% | 0.10% | 0.15% | |
| 0.28% | 0.20% | 0.10% | 0.24% | |
| 0.28% | 0.10% | 0.10% | 0.34% | |
| 0.28% | 0.10% | 0.10% | 0.46% | |
| 0.38% | 0.10% | 0.10% | 0.58% | |
| 0.60% | 0.10% | 0.10% | 0.79% |
| Effect | Laboratory Calibration | Noise During Field Measurement | Spectrometer Temperature Sensitivity | |
|---|---|---|---|---|
| Term affected | in Equation (4) | in Equation (4) | in Equation (4) | |
| Error correlation | All measurements of a single spectrometer | Mixed. See Table 2 | Independent | Fully correlated |
| Between spectrometers | Mixed. See Table 2 | Independent | Independent | |
| Between wavelengths | Mixed. See Table 2 | Independent | Partially correlated 1 | |
| Uncertainty magnitude | 400 nm | 25.43% | 0.41% | 3.38% |
| 500 nm | 2.16% | 0.19% | 0.25% | |
| 600 nm | 1.74% | 0.12% | 0.23% | |
| 700 nm | 1.75% | 0.11% | 0.30% | |
| 800 nm | 1.77% | 0.19% | 0.54% | |
| 900 nm | 1.85% | 0.2% | 0.96% | |
| 1000 nm | 5.16% | 0.28% | 1.97% |
| Effect | Field Radiance | Solar Irradiance Model | MODTRAN | AOT | WVC | Aerosol Model | |
|---|---|---|---|---|---|---|---|
| Term affected | in Equation (1) | in Equation (1) | |||||
| Error correlation | All measurements of a single spectrometer | Mixed. See Table 3 | Partially correlated | Partially correlated | Partially correlated | Partially correlated | Partially correlated |
| Between spectrometers | Mixed. See Table 3 | Fully correlated | Fully correlated | Fully correlated | Fully correlated | Fully correlated | |
| Between wavelengths | Mixed. See Table 3 | Fully correlated | Fully correlated | Fully correlated | Fully correlated | Fully correlated | |
| Uncertainty magnitude | 400 nm | 25.66% | 1.50% | 2.00% | 0.28% | 0.10% | 0.19% |
| 500 nm | 2.18% | 1.35% | 2.00% | 0.23% | 0.10% | 0.08% | |
| 600 nm | 1.76% | 1.05% | 2.00% | 0.20% | 0.03% | 0.22% | |
| 700 nm | 1.78% | 0.95% | 2.00% | 0.17% | 0.18% | 0.43% | |
| 800 nm | 1.86% | 1.05% | 2.00% | 0.16% | 0.12% | 0.47% | |
| 900 nm | 2.09% | 1.05% | 2.00% | 0.15% | 0.84% | 0.39% | |
| 1000 nm | 5.53% | 0.95% | 2.00% | 0.13% | 0.03% | 0.40% | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, L.; Zhao, Y.; Woolliams, E.R.; Dai, C.; Wang, N.; Liu, Y.; Li, L.; Wang, X.; Gao, C.; Li, C.; et al. Uncertainty Analysis for RadCalNet Instrumented Test Sites Using the Baotou Sites BTCN and BSCN as Examples. Remote Sens. 2020, 12, 1696. https://doi.org/10.3390/rs12111696
Ma L, Zhao Y, Woolliams ER, Dai C, Wang N, Liu Y, Li L, Wang X, Gao C, Li C, et al. Uncertainty Analysis for RadCalNet Instrumented Test Sites Using the Baotou Sites BTCN and BSCN as Examples. Remote Sensing. 2020; 12(11):1696. https://doi.org/10.3390/rs12111696
Chicago/Turabian StyleMa, Lingling, Yongguang Zhao, Emma R. Woolliams, Caihong Dai, Ning Wang, Yaokai Liu, Ling Li, Xinhong Wang, Caixia Gao, Chuanrong Li, and et al. 2020. "Uncertainty Analysis for RadCalNet Instrumented Test Sites Using the Baotou Sites BTCN and BSCN as Examples" Remote Sensing 12, no. 11: 1696. https://doi.org/10.3390/rs12111696
APA StyleMa, L., Zhao, Y., Woolliams, E. R., Dai, C., Wang, N., Liu, Y., Li, L., Wang, X., Gao, C., Li, C., & Tang, L. (2020). Uncertainty Analysis for RadCalNet Instrumented Test Sites Using the Baotou Sites BTCN and BSCN as Examples. Remote Sensing, 12(11), 1696. https://doi.org/10.3390/rs12111696