Fusion Analysis of Optical Satellite Images and Digital Elevation Model for Quantifying Volume in Debris Flow Disaster


Abstract
1. Introduction
2. Related Works and Research Objective
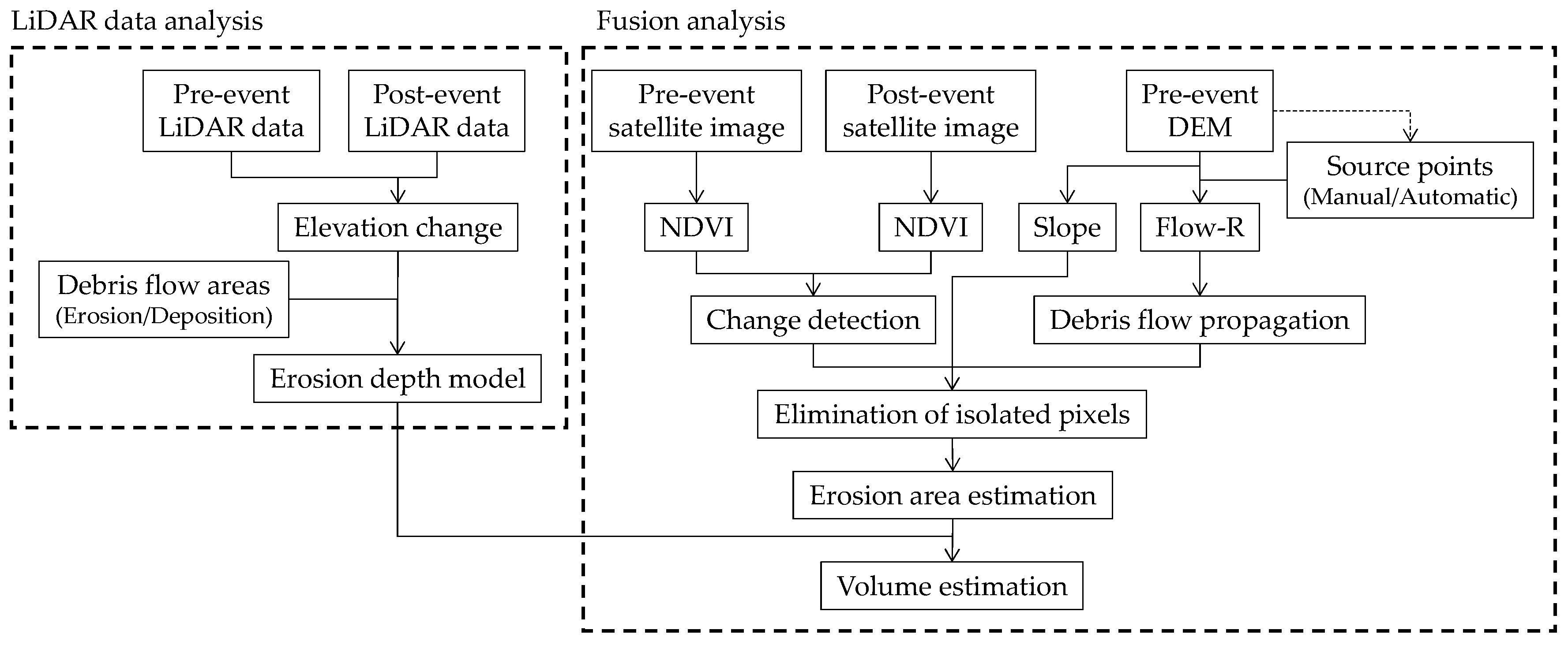
3. Methodology and Used Data
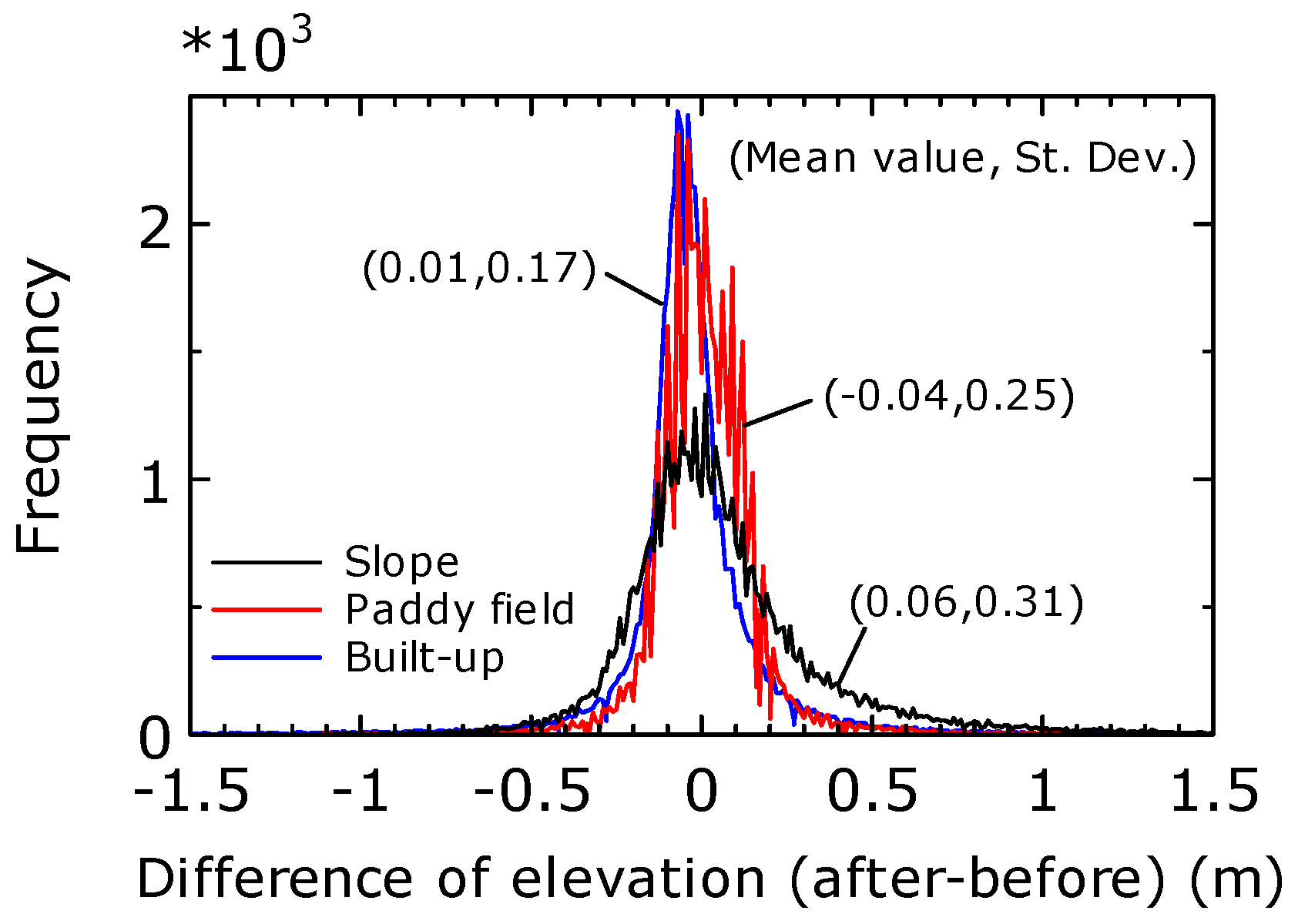
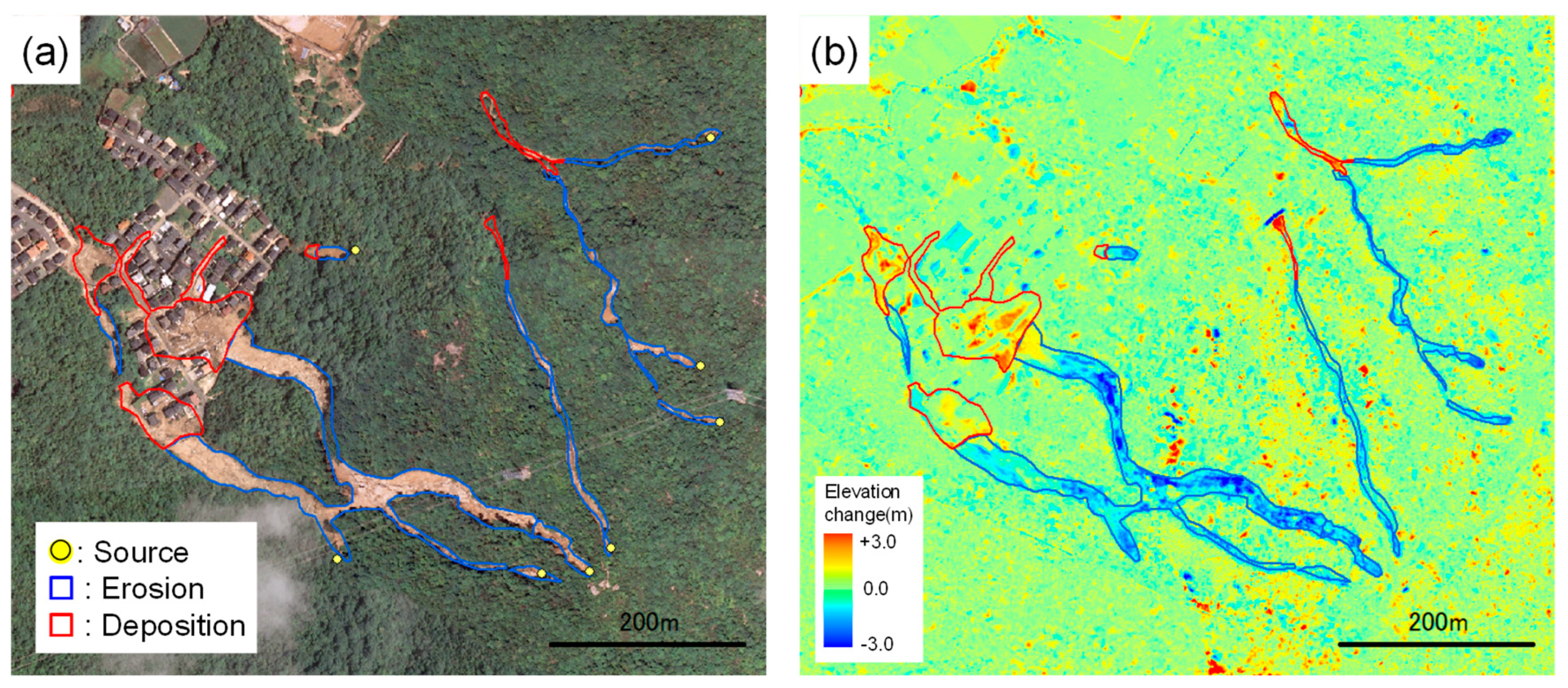
4. LiDAR Data Analysis
5. Fusion Analysis of Optical Satellite Images and DEM
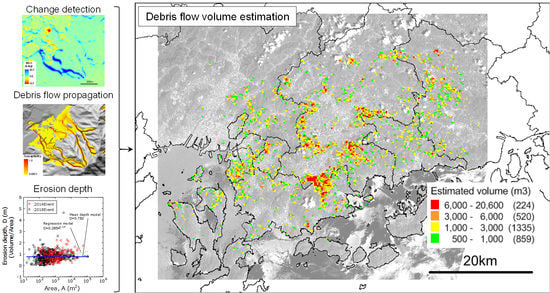
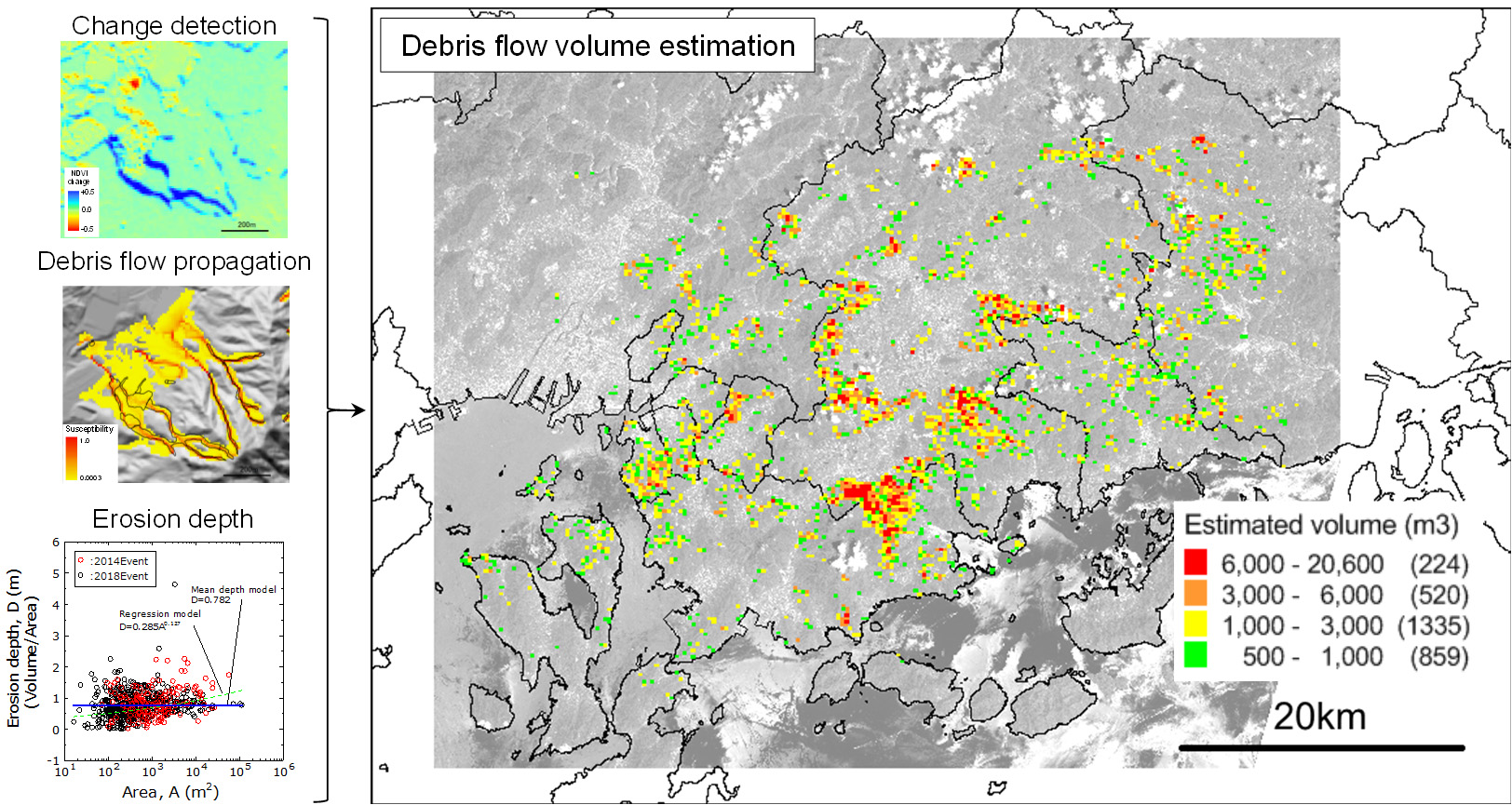
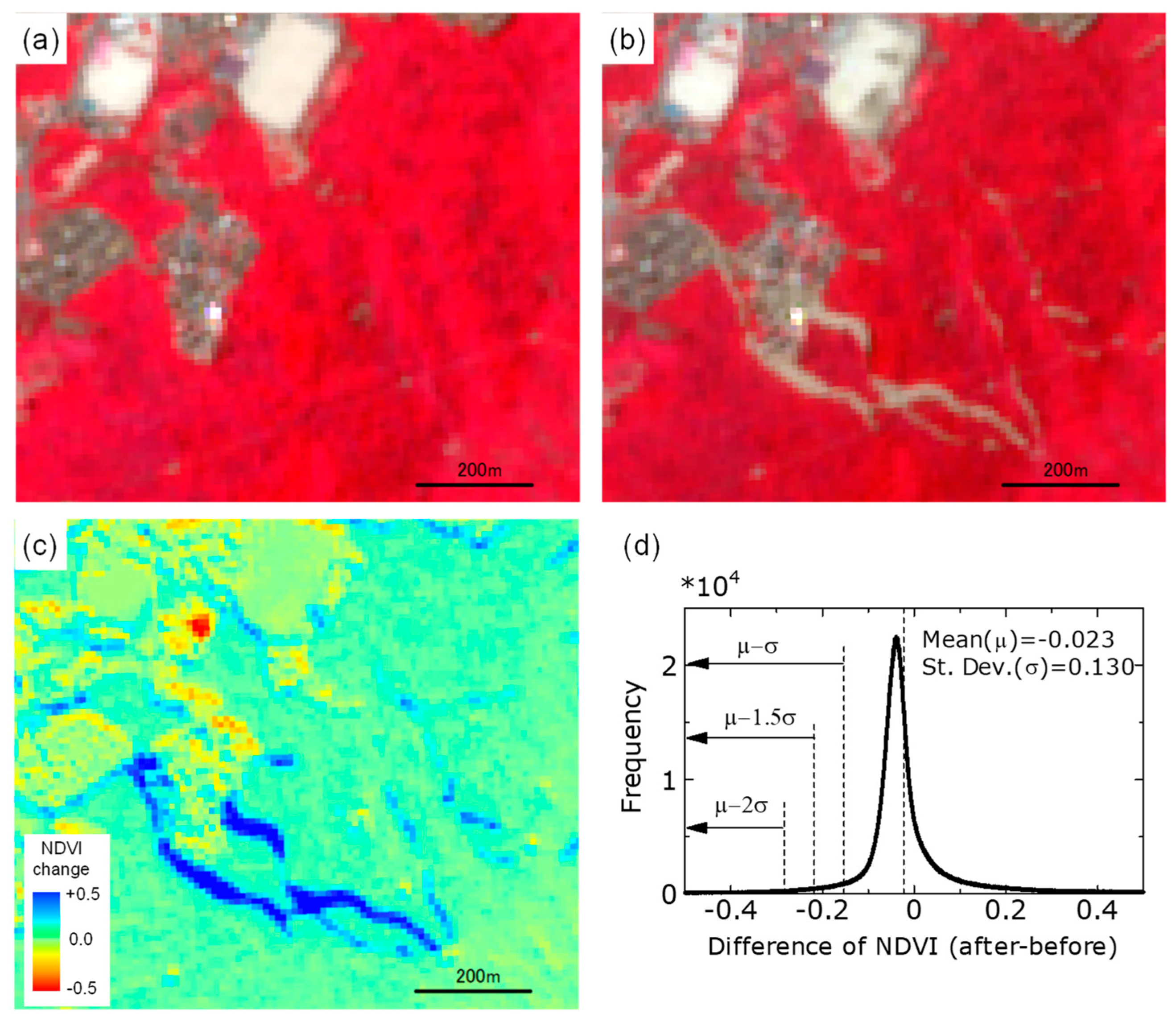
5.1. NDVI-based Change Detection
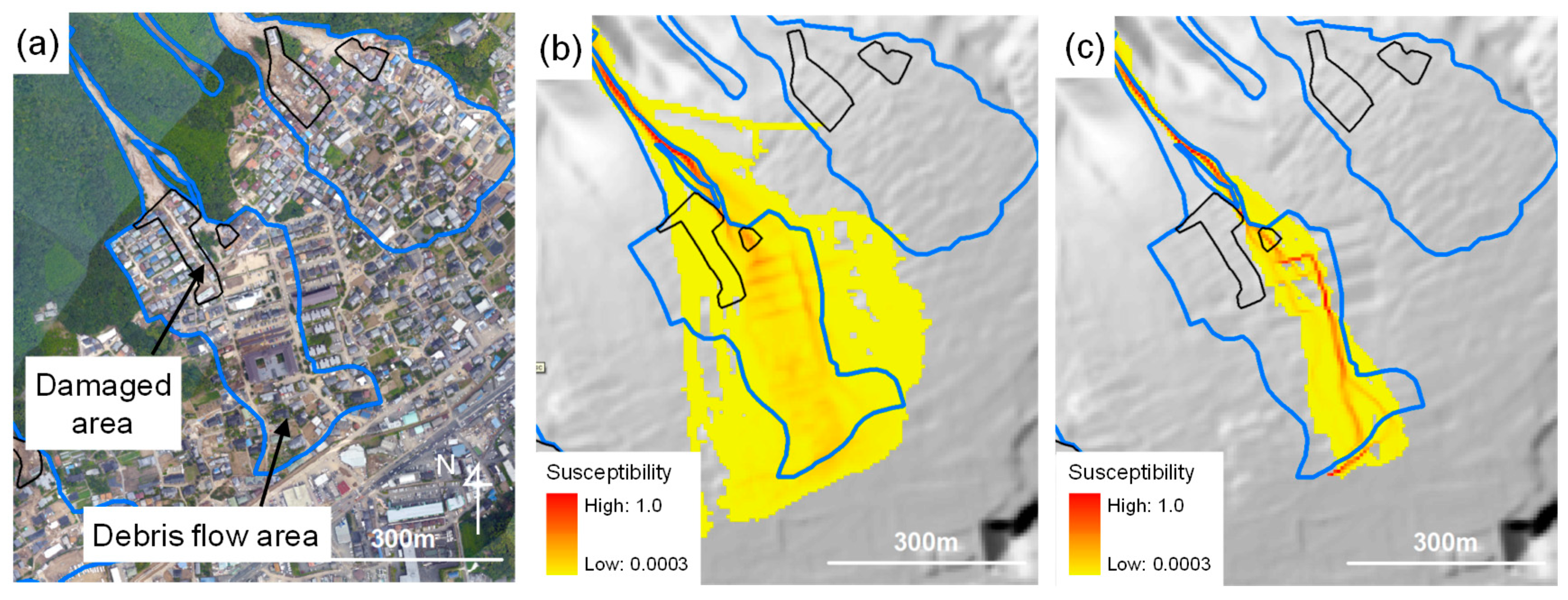
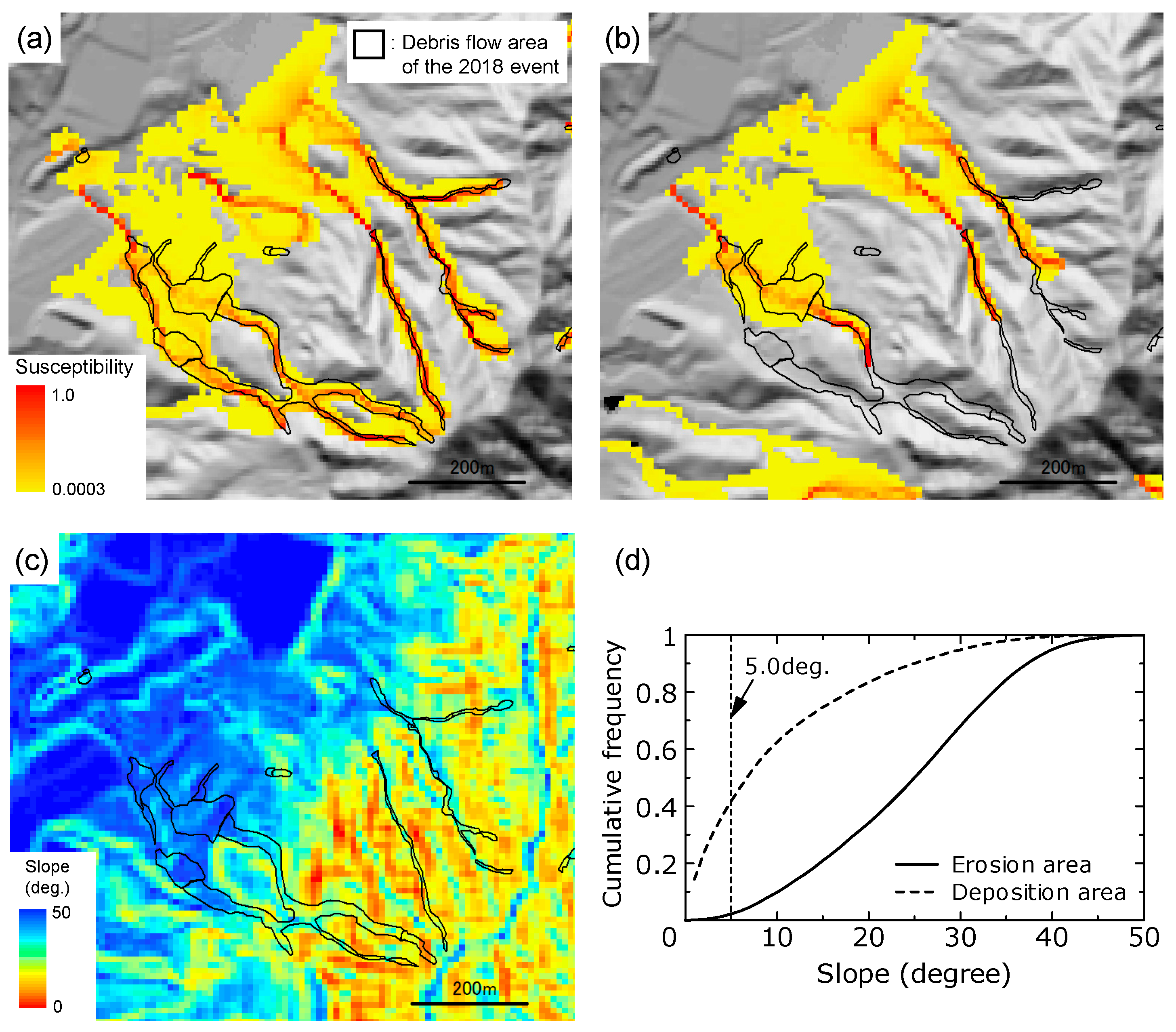
5.2. Debris Flow Propagation Analysis
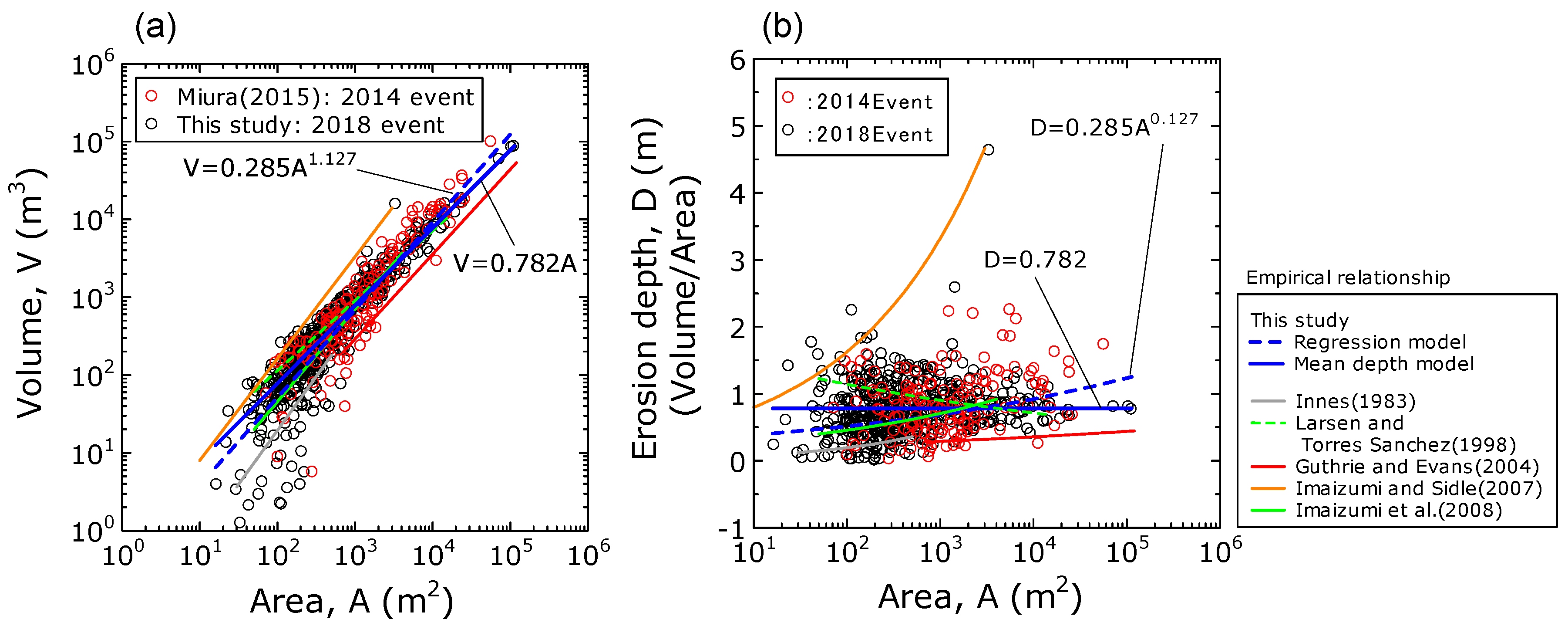
6. Estimation of Debris Flow Volumes
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cruden, D.M.; Varnes, D.J. Landslide types and process. Spec. Rep. Trans. Res. Board Nat. Acad. Sci. 1996, 249, 36–75. [Google Scholar]
- U. S. Geological Survey. Landslide Types and Process. 2019. Available online: https://pubs.usgs.gov/fs/2004/3072/pdf/fs2004-3072.pdf (accessed on 20 February 2019).
- Wang, G.; Sassa, K.; Fukuoka, H. Downslope volume enlargement of a debris slide-debris flow in the 1999 Hiroshima, Japan, rainstorm. Eng. Geol. 2003, 69, 309–330. [Google Scholar] [CrossRef]
- Wang, F.; Wu, Y.-H.; Yang, H.; Tanida, Y.; Kamei, A. Preliminary investigation of the 20 August 2014 debris flows triggered by a severe rainstorm in Hiroshima City, Japan. Geoenviron. Disasters 2015, 2, 17. [Google Scholar] [CrossRef]
- Miura, H. Soil Volume estimation in debris flow areas using LiDAR data in the 2014 Hiroshima, Japan rainstorm. In Proceedings of the SPIE 2015, Toulouse, France, 16 March 2015. [Google Scholar] [CrossRef]
- Tsurugi, H.; Seino, N.; Kawase, H.; Imada, Y.; Nakaegawa, T.; Takayabu, I. Meteorological overview and mesoscale characteristics of the heavy rain event of July 2018 in Japan. Landslides 2018, 16, 363–371. [Google Scholar] [CrossRef]
- Hirota, K.; Konagai, K.; Sassa, K.; Dang, K.; Yoshinaga, Y.; Wakita, E.K. Landslides triggered by the west Japan heavy rain of July 2018, and geological and geomorphological features of soaked mountain slopes. Landslides 2019, 16, 189–194. [Google Scholar] [CrossRef]
- Hiroshima Prefecture. Damage Situation by the Heavy Rain of July 2018 in Japan. 2019. (In Japanese). Available online: https://www.pref.hiroshima.lg.jp/uploaded/attachment/323003.pdf (accessed on 20 February 2019).
- Hervás, J.; Barredo, J.I.; Rosin, P.L.; Pasuto, A.; Mantovani, F.; Silvano, S. Monitoring landslides from optical remotely sensed imagery: Case history of Tessina landslide, Italy. Geomorphology 2003, 54, 63–75. [Google Scholar] [CrossRef]
- Miura, H.; Midorikawa, S. Detection of slope failure areas due to the 2004 Niigata-ken Chuetsu earthquake using high-resolution satellite images and digital elevation model. J Japan Assoc. Earthq. Eng. 2007, 7, 1–14. [Google Scholar]
- Tsai, F.; Hwang, J.-H.; Chen, L.-C.; Lin, T.-H. Post-disaster assessment of landslide in southern Taiwan after 2009 Typhoon Morakot using remote sensing and spatial analysis. Nat. Hazard. Earth. Syst. Sci. 2010, 10, 2179–2190. [Google Scholar] [CrossRef]
- Martha, T.R.; Kerle, N.; Jetten, V.; van Westen, C.J.; Kumar, K.V. Characterising spectral, spatial and morphometric properties of landslides for semi-automatic detection using object-oriented methods. Geomorphology 2010, 116, 24–36. [Google Scholar] [CrossRef]
- Rau, J.-Y.; Jhan, J.-P.; Rau, R.-J. Semiautomatic object-oriented landslide recognition scheme from multisensory optical imagery and DEM. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1336–1349. [Google Scholar] [CrossRef]
- Hölbling, D.; Friedl, B.; Eisank, C. An object-based approach for semi-automated landslide change detection and attribution of changes to landslide classes in northern Taiwan. Earth. Sci. Inform. 2015, 8, 327–335. [Google Scholar] [CrossRef]
- Fiorucci, F.; Ardizzone, F.; Mondini, A.C.; Viero, A.; Guzzetti, F. Visual interpretation of stereoscopic NDVI satellite images to map rainfall-induced landslides. Landslides 2019, 16, 165–174. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of different machine learning methods and deep-learning convolutional neural networks for landslide detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef]
- Lu, P.; Stumpf, A.; Kerle, N.; Casagli, N. Object-oriented change detection for landslide rapid mapping. IEEE Geosci. Remote. Sens. Lett. 2011, 8, 701–705. [Google Scholar] [CrossRef]
- Lv, Z.-Y.; Shi, W.; Zhang, X.; Benedikt, J.A. Landslide inventory mapping from bitemporal high-resolution remote sensing images using change detection and multiscale segmentation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1520–1532. [Google Scholar] [CrossRef]
- Chiang, S.-H.; Chang, K.-T.; Mondini, A.C.; Tsai, B.-W.; Chen, C.-Y. Simulation of event-based landslides and debris flow at watershed level. Geomorphology 2012, 138, 306–318. [Google Scholar] [CrossRef]
- Horton, P.; Jaboyediff, M.; Rudaz, B.; Zimmermann, M. Flow-R, a model for susceptibility mapping of debris flows and other gravitational hazards at a regional scale. Nat. Hazard. Earth Syst. Sci. 2013, 13, 869–885. [Google Scholar] [CrossRef]
- Schilling, S.P. Laharz-py: GIS Tools for Automated Mapping of Lahar Inundation Hazard Zones; U.S. Geological Survey Open-File Report: Reston, VA, USA, 2014; No.2014-1073.
- Melo, R.; Van Asch, T.; Zezere, J.L. Debris flow run-out simulation and analysis using a dynamic model. Nat. Hazar. Earth Syst. Sci. 2018, 18, 555–570. [Google Scholar] [CrossRef]
- Scheidl, C.; Rickenmann, D.; Chiari, M. The use of airborne LiDAR data for the analysis of debris flow events in Switzerland. Nat. Hazard. Eart. Syst. Sci. 2008, 8, 1113–1127. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazard. 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Bremer, M.; Sass, O. Combining airborne and terrestrial laser scanning for quantifying erosion and deposition by a debris flow event. Geomorphology 2012, 138, 49–60. [Google Scholar] [CrossRef]
- Tseng, C.-M.; Lin, C.-W.; Stark, C.P.; Liu, J.-K.; Fei, L.-Y.; Hsieh, Y.-C. Application of a multi-temporal, LiDAR-derived, digital terrain model in a landslide-volume estimation. Earth. Surf. Process. Landf. 2013, 38, 1587–1601. [Google Scholar] [CrossRef]
- Tsutsui, K.; Rokugawa, S.; Nakagawa, H.; Miyazaki, S.; Cheng, C.-T.; Shiraishi, T.; Yang, S.-D. Detection and volume estimation of large-scale landslides based on elevation-change analysis using DEMs extracted from high-resolution satellite stereo imagery. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1681–1696. [Google Scholar] [CrossRef]
- Martha, T.R.; Kerle, N.; Jetten, V.; van Westen, J.C.; Kumar, K.V. Landslide volumetric analysis using Cartosat-1-derived DEMS. IEEE Geosci. Remote Sens. Lett. 2010, 7, 582–586. [Google Scholar] [CrossRef]
- Innes, J.N. Lichenometric dating of debris-flow deposits in the Scottish Highlands. Earth. Surf. Process. Landf. 1983, 8, 579–588. [Google Scholar] [CrossRef]
- Laesen, M.C.; Torres-Sahchez, A.J. The frequency and distribution of recent landslides in three montane tropical regions of Puerto Rico. Geomorphology 1998, 24, 309–331. [Google Scholar]
- Guthrie, R.H.; Evans, S.G. Analysis of landslide frequencies and characteristics in a natural system, coastal British Columbia. Earth. Surf. Process. Landf. 2004, 29, 1321–1339. [Google Scholar] [CrossRef]
- Imaizumi, F.; Sidle, R.C. Linkage of sediment supply and transport processes in Miyagawa Dam catchment, Japan. J. Geophys. Res. 2007, 112, 3012. [Google Scholar] [CrossRef]
- Imaizumi, F.; Sidle, R.C.; Kamei, R. Effects of forest harvesting on the occurrence of landslides and debris flows in steep terrain of central Japan. Earth. Surf. Process. Landf. 2008, 33, 827–840. [Google Scholar] [CrossRef]
- Guzzetti, F.; Ardizzone, F.; Cardinali, M.; Rossi, M.; Valigi, D. Landslide volumes and landslide mobilization rates in Umbria, central Italy. Earth. Planet. Sci. Lett. 2009, 279, 222–229. [Google Scholar] [CrossRef]
- The Association of Japanese Geographers. 2019. (In Japanese). Available online: http://ajg-disaster.blogspot.com/2018/07/3077.html (accessed on 22 February 2019).
- Copernicus Open Access Hub. 2019. Available online: https://scihub.copernicus.eu/ (accessed on 25 February 2019).
- Geospatial Information Authority of Japan. 2019; (In Japanese). Available online: https://fgd.gsi.go.jp/download/menu.php (accessed on 25 February 2019).
- Hodgson, M.E.; Bresnahan, P. Accuracy of airborne Lidar-derived elevation: Empirical assessment and error budget. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef]
- Aguilar, F.J.; Mills, J.P.; Delgado, J.; Aguilar, M.A.; Negreiros, J.G.; Pérez, J.L. Modelling vertical error in LiDAR-derived digital elevation models. ISPRS J. Photogramm. Remote Sens. 2010, 65, 103–110. [Google Scholar] [CrossRef]
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for Sentinel-2. In Proceedings of the SPIE 2017, 10427, Image and Signal Processing for Remote Sensing XXIII, Bellingham, DC, USA, 11–13 September 2018. [Google Scholar] [CrossRef]
- Miura, H.; Midorikawa, S.; Kerle, M. Detection of building damage areas of the 2006 Central Java, Indonesia, earthquake through digital analysis of optical satellite images. Earthq. Spectr. 2013, 29, 453–473. [Google Scholar] [CrossRef]
- Holmgren, P. Multiple flow direction algorithms for runoff modelling in grid based elevation models: An empirical evaluation. Hydrol. Process. 1994, 8, 327–334. [Google Scholar] [CrossRef]
- Miura, H.; Hiasa, K. Applicability of empirical models to urban areas for predicting debris flow inundation areas by using digital elevation model. J. Inst. Soc. Saf. Sci. 2017, 31, 309–318. [Google Scholar]
- Gamma, P. dfwalk—Ein Murgang-Simulationsprogramm zur Gefahrenzonierung; Geographisches Institut der Universitat Bern: Bern, Switzerland, 2000. [Google Scholar]
- Ministry of Land, Infrastructure, Transport and Tourism. Damage Report of the Landslide Disaster Due to the Heavy Rain of July 2018. (In Japanese). Available online: http://www.mlit.go.jp/river/sabo/committee_jikkousei/180911/02shiryo2.pdf (accessed on 29 March 2019).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Timing | Acquisition Date | Spatial Resolution (m) |
|---|---|---|---|
| LiDAR-derived DEM *1 | Pre-event | 2015–2017 | 1 |
| Post-event | 15–24 July 2018 | 1 | |
| Optical satellite image (Sentinel-2 *2) | Pre-event | 1 June 2018 | 10 |
| Post-event | 16 July 2018 | 10 | |
| DEM derived by LiDAR and photogrammetry *3 | Pre-event | 2015 | 10(5) |
| ID | Equation | Minimum A (m2) | Maximum A (m2) | N | Source |
|---|---|---|---|---|---|
| 1 | V = 0.285A1.127 | 1.6 × 101 | 1.1 × 105 | 637 | Regression model (This study) |
| 2 | V = 0.782A | Mean depth model (This study) | |||
| 3 | V = 0.0329A1.3852 | 3 × 101 | 5 × 102 | 30 | Innes (1983) |
| 4 | V = 1.826A0.898 | 5 × 101 | 1.6 × 104 | 1019 | Larsen and Torres-Sanchez (1998) |
| 5 | V = 0.1549A1.0905 | 7 × 102 | 1.2 × 105 | 124 | Guthrie and Evans (2004) |
| 6 | V = 0.39A1.31 | 1 × 101 | 3 × 103 | 51 | Imaizumi and Sidle (2007) |
| 7 | V = 0.19A1.19 | 5 × 101 | 4 × 103 | 11 | Imaizumi et al. (2008) |
| Spreading Algorithm | Direction Algorithm | Holmgren (1994) Modified | x | 4 |
| dh (m) | 2 | |||
| Persistence | Weights, w | Default (Uniform weights 1.0 for all directions) | ||
| Energy calculation | Friction loss function | Threshold of travel angle(deg.) | 7 | |
| Energy limitation | Maximum velocity(m/s) | 15 | ||
| w0 | w45 | w90 | w135 | w180 | |
|---|---|---|---|---|---|
| Default | 1 | 1 | 1 | 1 | 1 |
| Gamma [2000] | 1.5 | 1 | 1 | 1 | 0 |
| ID | Municipality | Volume (Million Cubic Meters, ×106 m3) | |||||
|---|---|---|---|---|---|---|---|
| Observed | Estimated | ||||||
| LiDAR * | Manual Source | Without Flow-R | Automatic Source | ||||
| Name | Area (sq km) | with Flow-R | Extreme Event | Rare Event | |||
| 1 | Hiroshima city | 902 | 0.60 | 0.65 | 7.32 | 1.19 | 0.76 |
| 2 | Kure city | 352 | 1.83 | 1.30 | 3.48 | 0.82 | 0.44 |
| 3 | Higashi-Hiroshima city | 636 | 2.77 | 3.40 | 10.89 | 1.47 | 0.57 |
| 4 | Takehara city | 118 | 0.60 | 0.36 | 1.87 | 0.22 | 0.12 |
| 5 | Mihara city | 471 | 0.81 | 0.92 | 4.08 | 0.30 | 0.15 |
| 6 | Edajima city | 100 | 0.19 | 0.13 | 0.41 | 0.08 | 0.05 |
| 7 | Kumano town | 34 | 0.24 | 0.26 | 0.35 | 0.10 | 0.04 |
| 8 | Saka town | 16 | 0.37 | 0.25 | 0.34 | 0.16 | 0.11 |
| 9 | Fuchu town | 10 | 0.05 | 0.04 | 0.10 | 0.02 | 0.01 |
| 10 | Kaita town | 14 | 0.04 | 0.05 | 0.09 | 0.04 | 0.03 |
| Total | 2653 | 7.50 | 7.35 | 28.93 | 4.40 | 2.28 | |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miura, H. Fusion Analysis of Optical Satellite Images and Digital Elevation Model for Quantifying Volume in Debris Flow Disaster. Remote Sens. 2019, 11, 1096. https://doi.org/10.3390/rs11091096
Miura H. Fusion Analysis of Optical Satellite Images and Digital Elevation Model for Quantifying Volume in Debris Flow Disaster. Remote Sensing. 2019; 11(9):1096. https://doi.org/10.3390/rs11091096
Chicago/Turabian StyleMiura, Hiroyuki. 2019. "Fusion Analysis of Optical Satellite Images and Digital Elevation Model for Quantifying Volume in Debris Flow Disaster" Remote Sensing 11, no. 9: 1096. https://doi.org/10.3390/rs11091096
APA StyleMiura, H. (2019). Fusion Analysis of Optical Satellite Images and Digital Elevation Model for Quantifying Volume in Debris Flow Disaster. Remote Sensing, 11(9), 1096. https://doi.org/10.3390/rs11091096