1. Introduction
The research in indoor localization systems has seen substantial growth over the past decade [
1,
2]. While outdoor localization systems (such as GPS) fulfill most context-aware application requirements, the design of accurate indoor localization mechanisms is still an open issue. The main drawback of such scenarios is the presence of obstacles such as walls or furniture, which can cause a negative impact in the signal.
Many indoor localization mechanisms have been proposed using wireless technologies such as Wi-Fi, Bluetooth, ZigBee or LoRa [
3]. However, due to the wide availability of Wi-Fi signals in indoor environments and the presence of Wi-Fi adapters in current smartphones, Wi-Fi based localization mechanisms have attracted most attention.
Wi-Fi based localization mechanisms rely on Wi-Fi radio spectrum parameters, such as time difference of arrival (TDoA), angle of arrival (AoA) or received signal strength indicator (RSSI) [
4]. The most widely used parameter is RSSI since it is an inexpensive indicator to obtain and it is available on most commercial wireless devices without need of additional hardware. However, this parameter is greatly affected by the indoor inherent features, which cause reflections, interference and shadowing in the signal [
5].
Among the RSSI-based indoor localization methods, we find two approaches [
4]: fingerprinting and range-model based. Both approaches are being considered for addressing the two main localization problems: positioning and tracking. The former simply estimates the smartphone position, while the latter estimates the smartphone position taking into account its trajectory. While fingerprinting has proven to be useful in developing accurate positioning mechanisms [
6], its use on developing tracking mechanisms raises many concerns.
As for most existing RSSI-based ranging models, they usually depend on the path loss between transmitter and receiver devices. The RSSI is related to distance using an environment-dependent exponent which needs to be obtained before the actual deployment of the localization mechanism in the target environment. Traditionally, the log-distance path loss model [
7] (LDPLM) has been adopted by the majority of researches and can be expressed as:
where
is the received signal strength in dBm at
d meters,
is the received signal strength in dBm at
meters and
n is the path loss exponent (unitless). The
n value indicates how the radio signal spreads in a certain scenario. It varies between 2 and 3 in an indoor scenario [
7], depending upon the line-of-sight (LOS) operating conditions between transmitter and receiver. In LOS conditions, the
n value is close to 2, while in non-line-of-sight (NLOS) conditions, the value is close to 3. However, LDPLM is not able by itself to accurately represent the real attenuation of RSSI signal in indoor environments, due to the great variety of factors affecting the Wi-Fi signal.
In one of our previous works [
8], we overcame these problems by using RANdom SAmple Consensus (RANSAC) smoothing algorithm. In addition, we proposed a (static) calibration methodology for indoor localization systems capable of defining one LOS and different NLOS conditions by dividing the environment into several zones. Although this approach proved to improve the RSSI estimation, we have found out that this approach has serious limitations when used by smartphones on the development of indoor tracking mechanisms.
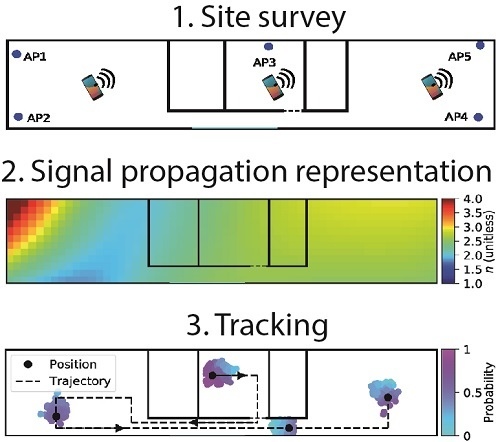
In this work, we present an analysis of signal propagation behavior when the capture device (a smartphone) is in motion. To the best of our knowledge, this is the first work that studies this behavior, and especially, this behavior in smartphones. The main goal is to design a novel calibration methodology which creates a signal propagation representation to be used by android-based smartphones in Wi-Fi-based indoor tracking systems. In addition, we also design a particle-filter-based indoor tracking algorithm capable of using the proposed calibration methodology.
The main contributions of this work are:
The analysis of the RSSI signal behavior of in-motion captures in order to implement an indoor tracking system for smartphones.
The proposal of a novel in-motion calibration methodology, which can be implemented in a typical indoor scenario using an inexpensive time procedure. The outcome is a signal propagation representation of the access points belonging to the wireless platform.
The design of an indoor tracking system following a particle filter approach. In particular, instead of converting the RSSI into distance, the weighting stage of the particle filter algorithm makes use of the RSSI estimation according to the distance. That RSSI estimation is based on the signal propagation representation adopted.
The remainder of this paper is organized as follows.
Section 2 presents some related work.
Section 3 shows a study of the in-motion Wi-Fi signal behavior under smartphones perspective. Based on this analysis,
Section 4 describes the proposed calibration methodologies, which create several signal propagation representations.
Section 5 presents the design of a tracking algorithm capable of using the resulting signal propagation representations. The whole indoor tracking algorithm is evaluated in a real-world scenario in
Section 6. Finally, we conclude the paper in
Section 7.
2. Related Work
2.1. Factors Affecting Wi-Fi Signal
Wi-Fi radio signal propagation is sensitive to a multitude of factors that usually are divided into two categories: environment characteristics and hardware differences between both transmitter and receiver devices [
9,
10]. The former includes, among others, multipath propagation, fading, LOS and NLOS situations and motion of people. The latter covers sending power, antenna anisotropy, hardware heterogeneity, signal propagation changes and so on. An indoor tracking system must be able to cope with all these factors in order to achieve suitable accuracy.
The direct consequence of these factors is a continuous variation in the RSSI level. Traditionally, the effects produced by these factors have been modeled as Gaussian noise due to the inherent random propagation nature of Wi-Fi signal [
5,
7]. However, in order to reduce the noise, the research community has applied some smoothing or filter algorithms. Belmonte-Hernández et al. [
11] propose to apply multistage filters, using a Modified version of Kalman Filter (MKF) and an Alpha-Beta Filter. Kalman Filters are also used by Chen et al. [
12] in conjunction with an outliers-remover based on Tukey’s test method to smooth the RSSI value. However, the use of Kalman Filters requires knowing the actual Wi-Fi signal propagation model. Martínez et al. [
8] applies the RANSAC smoothing algorithm to remove RSSI outliers knowing the actual distance between transmitter and receiver. However, the RANSAC algorithm is not applicable to an indoor tracking system since the actual distance between such devices is unknown. The work presented in [
13] by Booranawong et al. presents an analysis between three filter algorithms: Window Moving Average Filter (WMAF), Exponentially Weighted Moving Average Filter (EWMAF) and Span Thresholding Filter (STF). These algorithms are suitable for tracking since the current position estimate is obtained using previous RSSI values, i.e., the position estimates are determined using actual RSSI samples and not by applying a signal propagation model. any model of the signal. Although both EWMAF and STF show good results, they have some parameters that need to be adjusted with real RSSI values, introducing once again some noise. With all this in mind, in this work we opt for using WMAF.
2.2. Calibration of Wi-Fi-Based Indoor Localization Systems
Previous works on calibration of Wi-Fi-based indoor localization system can be divided into two categories depending upon the followed localization approach, i.e., fingerprinting or range-based model. Fingerprint calibration consist of capturing the RSSI in several known locations of the environment in order to create a RSSI indoor radio map, such the work presented in [
14]. The calibration of range-based models localization systems seeks to tune the model parameters in order to represent the signal propagation in a given environment [
15]. Although the fingerprinting approach has proven to be useful in developing accurate positioning mechanisms, we focus on range-based models since they provide a more general solution and do not need to rebuild the indoor radio map.
Several range-based models have been proposed to predict the indoor radio propagation: Log-Distance Path Loss Model (LDPLM) [
7], Multi-Wall Model (MWM) [
16], New Empirical Model (NEM) [
17] or Radio Irregularity Model (RIM) [
9]. LDPLM (Equation (
1)) assumes a logarithmic dependence between path-loss and distance. NWM and NEM are modifications of LDPLM, in which the authors introduce some new parameters to model wall attenuation, floor attenuation and angle of incidence. Finally, RIM introduces some parameters to model the radio irregularity causes: anisotropy, continuous variations and heterogeneity. The introduction of such parameters proved to improve the RSSI estimation, however, the number of parameters to be estimated increase, as well as the computation complexity in order for parameters to be estimated. Therefore, in this work we opt for using LDPLM due to its simplicity.
In order to obtain LDPLM parameters (i.e., to calibrate the model), some RSSI captures in known locations of target environment are needed [
18]. The captured data is passed on to an algorithm capable of obtaining parameters value, such as Least Squares [
19] or Particle Filters [
20]. The authors of [
19,
20] obtain a single parameter value for the entire environment, however, this approach cannot describe the signal propagation in complex real-world scenarios. This is due to LDPLM not being able to accurately represent the real attenuation of Wi-Fi signal in environments with the presence of NLOS situations between receiver and transmitter devices [
21]. To overcome this problem, Carrera et al. [
22] define two different situations in which a particular model is obtained: one for LOS situations and another one for NLOS situations. However, the definition of such situations depends on the determination of a RSSI value from which NLOS situations are assumed. Due to the Wi-Fi signal propagation changes, this value may change over the time, therefore, the system can misinterpret LOS and NLOS situations. By contrast, Martínez et al. [
8] define both LOS and NLOS situations based on the environment’s floor plan. This approach proved to be more accurate, since LOS and NLOS situations are properly distinguished. In this paper, we introduce a novel in-motion calibration methodology, based on a particle filter where we estimate the RSSI according to the distance, rather than converting the RSSI into distance. Our numerical results show a significant improvement on the performance of the localization estimation.
3. Study of Wi-Fi Signal Behavior in Motion
This section shows a study of Wi-Fi signal behavior when the receiver device, in our case a smartphone, moves around a given space. The primary goal of this study is to find out the path loss exponent actual behavior in order to build an accurate and robust Wi-Fi signal propagation representation in indoor scenarios.
To reach this goal, an in-motion RSSI capture in one laboratory of the Albacete’s Research Institute of Informatics has been carried out. One TP-Link Archer C7 AC1750 Access Point (AP) operating in 2.4 GHz band of IEEE 802.11n Wi-Fi specification has been deployed in a known position of the laboratory. The receiver device (LG Nexus 5) captures continuously the RSSI of such AP following a predefined trajectory whose coordinates are known.
3.1. RSSI Smoothing
In tracking, the current position of the device depends on the previous positions, therefore, the current position has to be based on the proximities of the previous positions. In this way, unexpected jumps should not be allowed by indoor tracking systems. Due to the noisy nature of the Wi-Fi signal, which is reflected in continuous variations of RSSI value, RSSI-based indoor tracking systems can considerably vary. To overcome this problem, a smoothing algorithm can be used in order to reduce the RSSI value noise [
13].
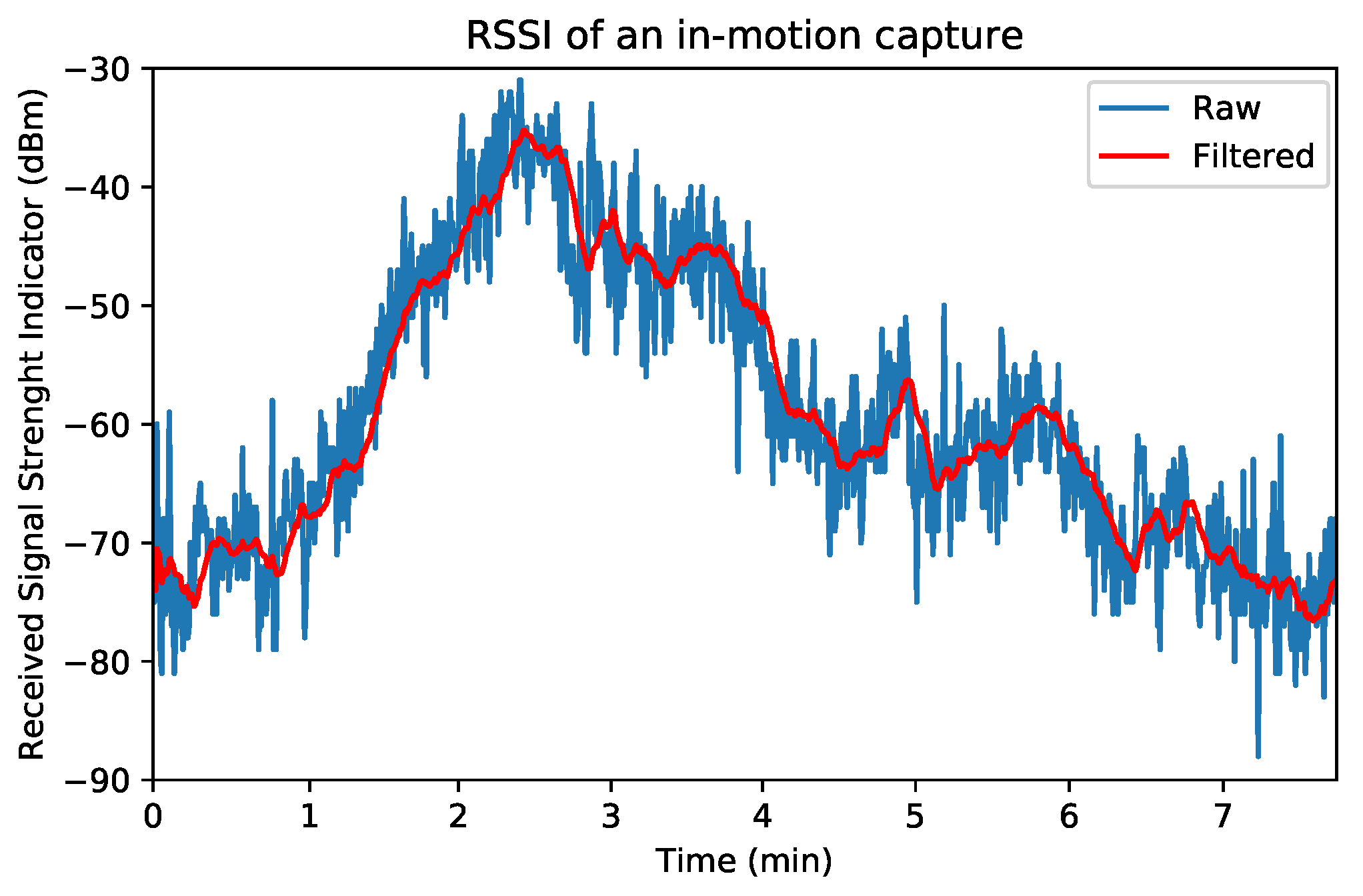
To show the benefits of using a smoothing algorithm, both raw and smoothed RSSI values of the in-motion capture have been plotted in
Figure 1. The blue line represents the raw RSSI, while the red line represents the smoothed RSSI using a Window Moving Average Filter (WMAF).
3.2. Relation between RSSI and Distance
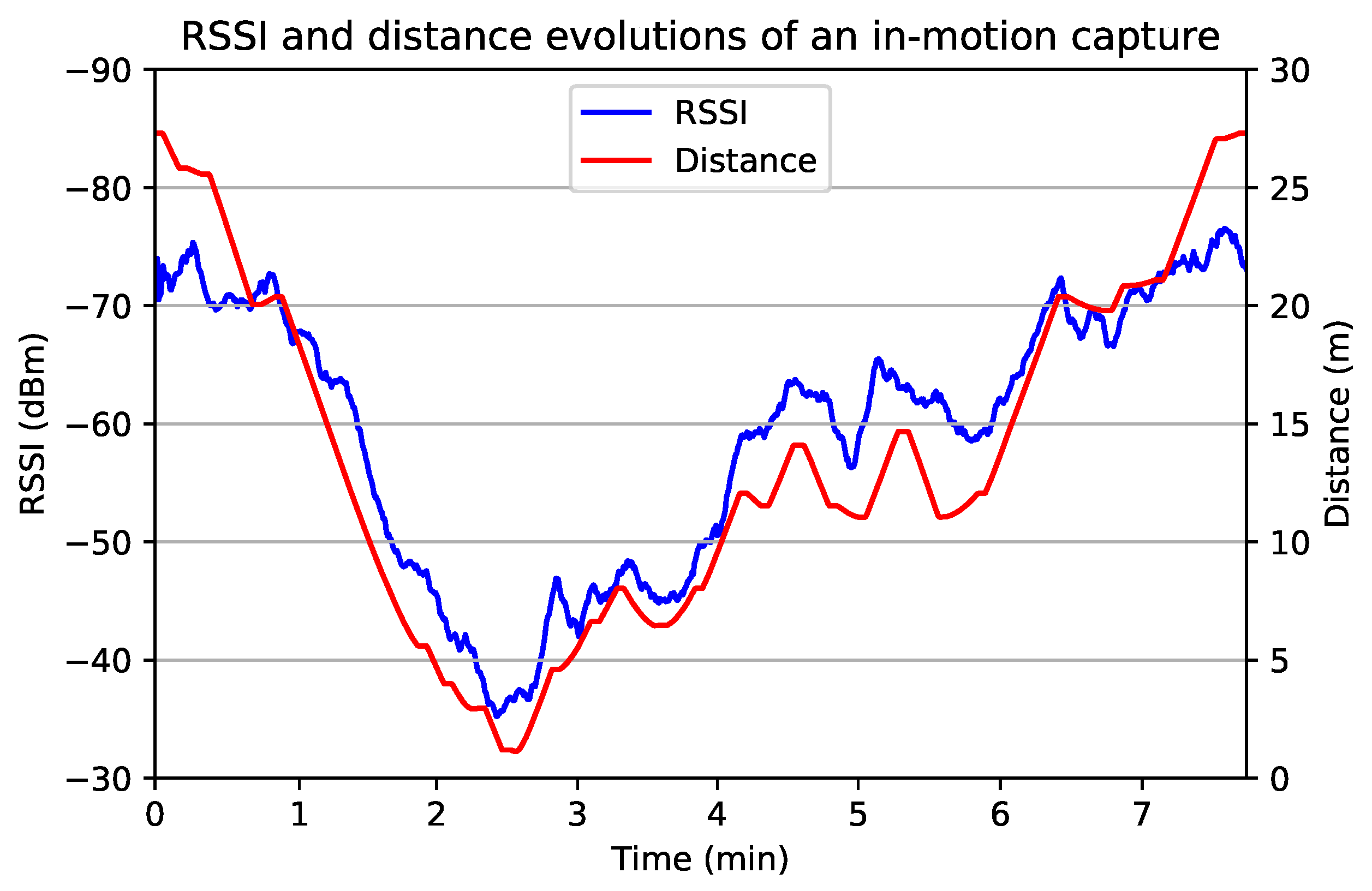
Since the ground truth of the in-motion capture is known, the actual distance between the transmitter and the receiver can be computed.
Figure 2 shows the RSSI reported at the corresponding distance represented by the red line. As expected, the Wi-Fi signal fades with distance [
5,
7]. However, Equation (
1) is unable to fully characterize the behavior of the RSSI metric [
23].
As shown in
Figure 2, the value of the RSSI remains practically constant at the closest distances to an AP. This fact has been studied in [
24], where the authors conclude that such distances (less than
) exhibit an NLOS behavior, i.e., there is hardly any signal fading. Distances between
and 15 m, which in our case corresponds with LOS situations and the first NLOS situations, exhibit high signal fading. Larger distances than 15 m, i.e., hard NLOS situations, exhibit low signal fading.
3.3. Path Loss Exponent Evolution
Since our approach is based on the LDPLM range-based model, we should start by estimating the path loss exponent value. Traditionally, this value is inferred using RSSI captures taken in a predefined set of measurement points. However, this approach is not able to show the actual behavior of such parameters in indoor tracking systems due to the absence of motion in the capturing process.
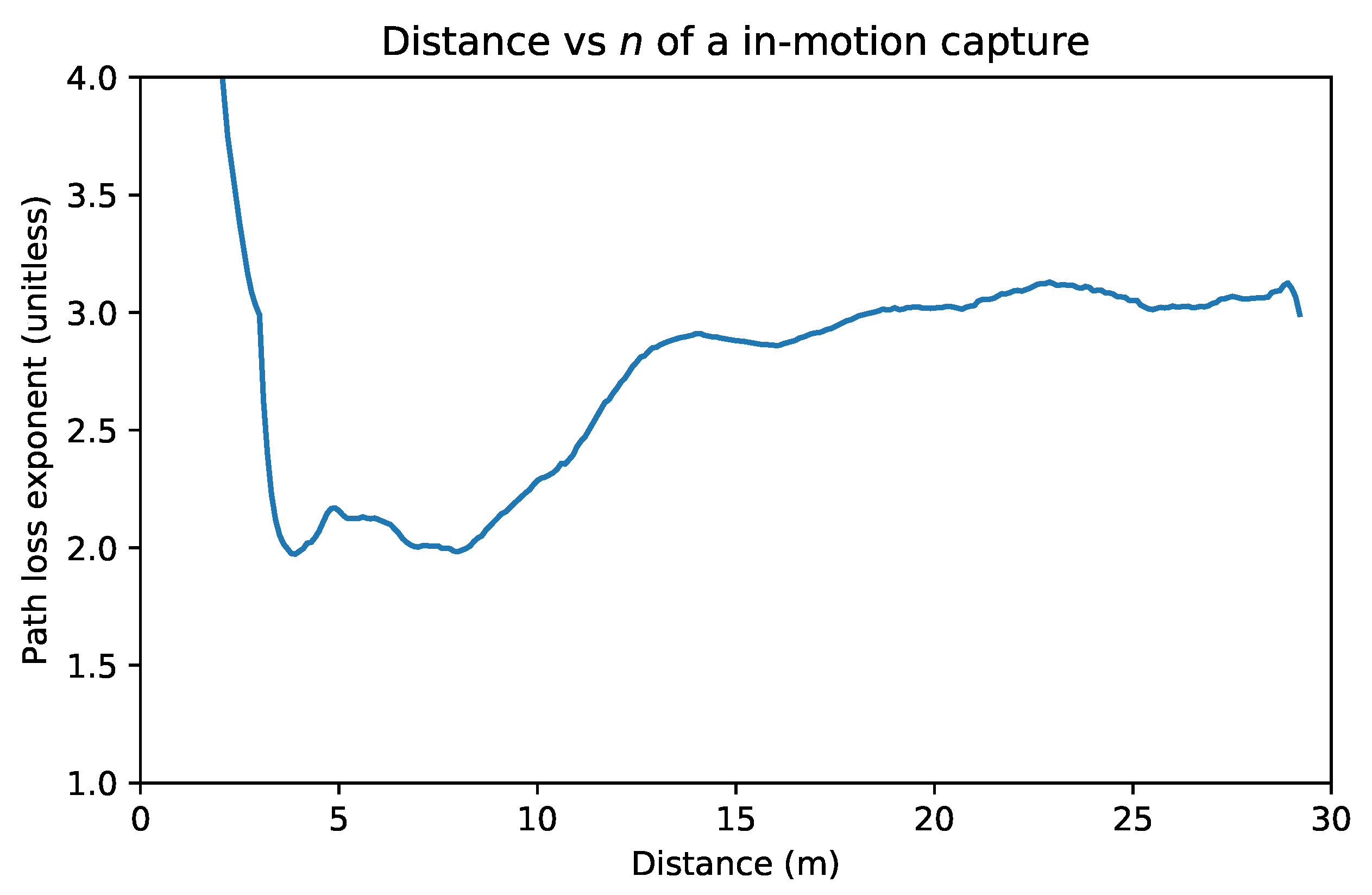
Instead, in this work the path loss exponent value is inferred using Equation (
1) with the smoothed in-motion RSSI capture and the actual distance. The results can be seen in
Figure 3, which plots the path loss exponent as a function of distance. The results show that when the smartphone is placed very close to the AP (less than
), the value of the path loss exponent value is at its highest. As expected, we found out that as far as the smartphone is displaced across our lab, always under LOS conditions, the value of the
n remains close to 2. Furthermore, as soon as we placed the smartphone under NLOS conditions, the path loss exponent value increases up to 3. This results shows the fundamental difference between classical approaches and the actual in-motion path loss exponent behaviour. Traditionally, two path loss exponent values are used: one in LOS conditions and another one in NLOS conditions [
22]. We found based on our results that the path loss exponent value needs to be gradually increased when NLOS starts to reach a value close to 3.
From the above, we can make the following observations:
A smoothing algorithm needs to be used in order to reduce the inherent Wi-Fi signal noise.
The in-motion RSSI value evolution shows a fading-relation with distance. However, the fading exhibits a different behavior depending upon the distance and LOS condition between the transmitter and the receiver.
Different path loss exponent values are needed to be used according to the distance between transmitter and receiver devices.
4. Calibration Methodologies for Smartphone-Based Indoor Tracking Systems
In this section, we first introduce two different calibration methodologies to be potentially included in the development process of smartphone-based indoor tracking systems. Our study is motivated by our preliminary findings reported in
Section 3. The ultimate goal of our study is therefore to identify the best calibration methodology to create accurate and robust signal propagation representations for each AP in the target environment, i.e., to properly establish the LDPLM’s path loss exponent value.
The calibration process for both methodologies starts by capturing, throughout the environment, RSSI samples in order to create a spatial signal propagation representation of each access point. As explained below, static and in-motion sample gathering procedures are considered. Our goal is therefore to solve Equation (
1) to determine the values of the path loss exponent,
n for each access point:
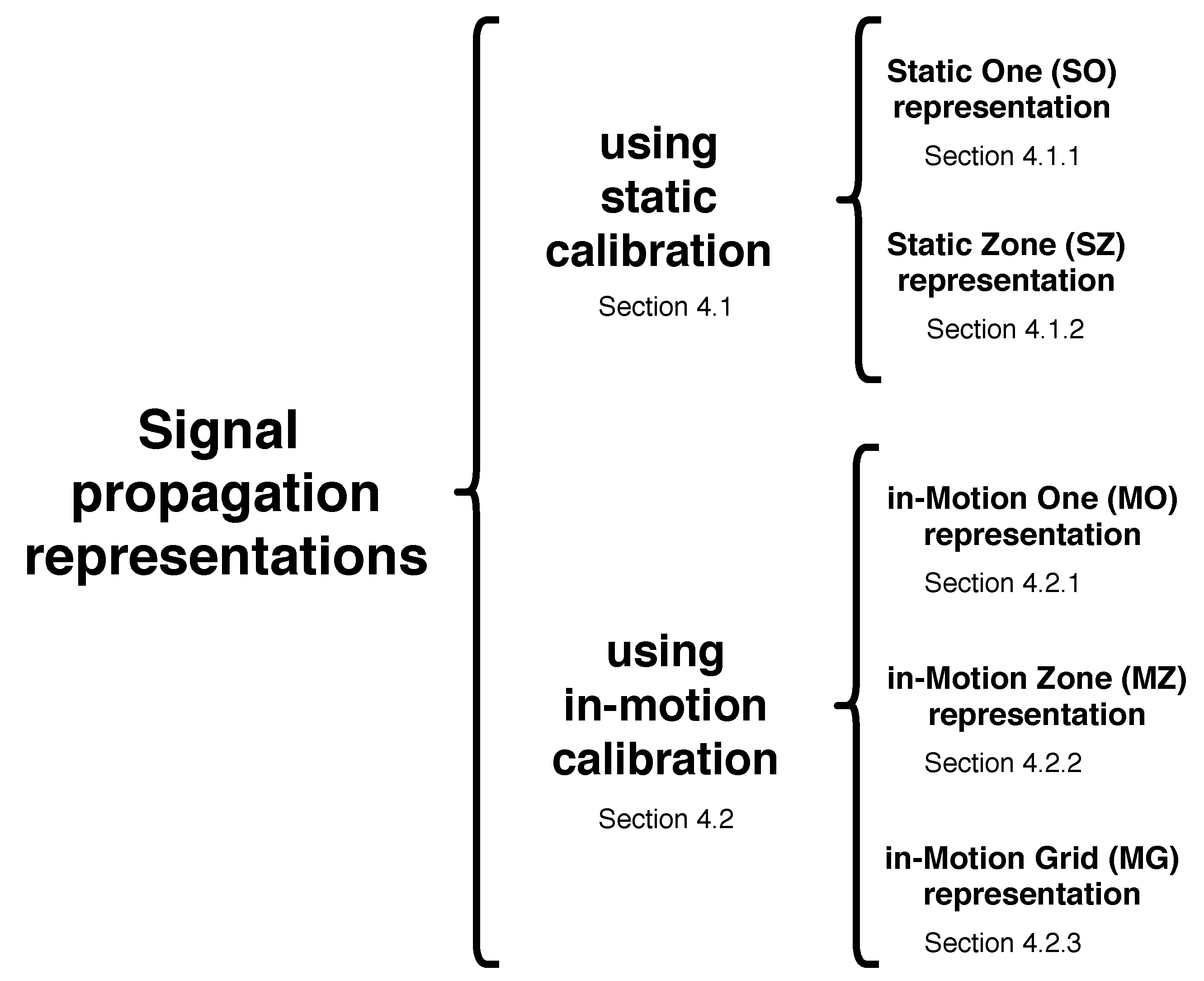
Figure 4 shows the five proposed signal propagation representations, of which two of them are obtained using the static calibration method, while the three others are determined using the in-motion calibration method. The following sections explain the overall calibration methodologies.
4.1. Static Calibration Methodology
The static calibration methodology is named static due to its RSSI capture procedure is performed motion-free by placing the smartphone at several independent measurement points whose coordinates are known. The pedestrian who holds the smartphone remains stationary in each measurement point while the smartphone is capturing the RSSI samples.
This calibration methodology is based on a previous work [
8], where we proposed using (1) the RANdom SAmple Consensus (RANSAC) algorithm to smooth the signal noise and (2) an environment zone division based on environment’s structural changes. RANSAC is an iterative method for estimating a mathematical model from a dataset likely to contain outliers. It iteratively estimates models from random subsets of the original data that are then evaluated against the complete data set until some conditions about the model are met. The use of RANSAC is fully justified due to the unpredictable nature of Wi-Fi signal. This approach is capable of defining one LOS situation and several NLOS situations for each AP and assigning a different path loss exponent value to each combination.
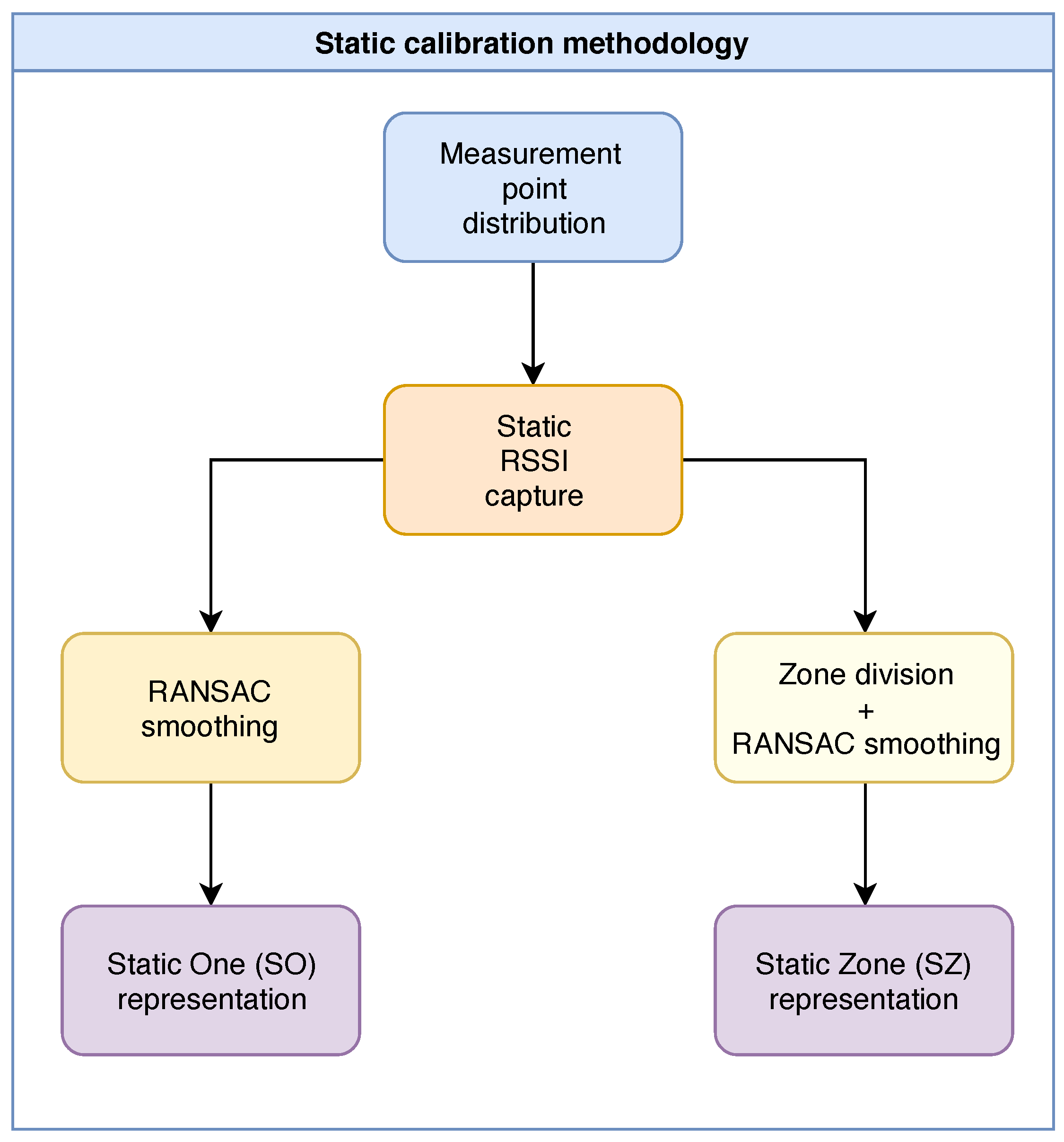
The entire calibration procedure can be seen in
Figure 5. First, several measurement points are distributed along the target environment. The point distribution has to cover most of the target environment in order to capture the RSSI of each AP at several distances. Then, the static RSSI capture is performed as commented above. Finally, two signal propagation representations are proposed: Static One (SO) and Static Zone (SZ). The following section explains both representations.
4.1.1. Static One Representation
The entire RSSI raw dataset is firstly smoothed using RANSAC algorithm. Then, using the resulting smoothed dataset, a single path loss exponent value for each AP is computed by averaging all infered path loss exponent values.
4.1.2. Static Zone Representation
The environment is divided into several zones according to environment structural changes such as presence of corridors or rooms. In that way, measurement points can be classified in the zone they belong. Then, each raw RSSI zone dataset is smoothed using RANSAC algorithm. The resulting smoothed zone dataset is finally used to compute one path loss exponent value for each combination of AP and zone by averaging all values of each combination.
4.2. In-Motion Calibration Methodology
As
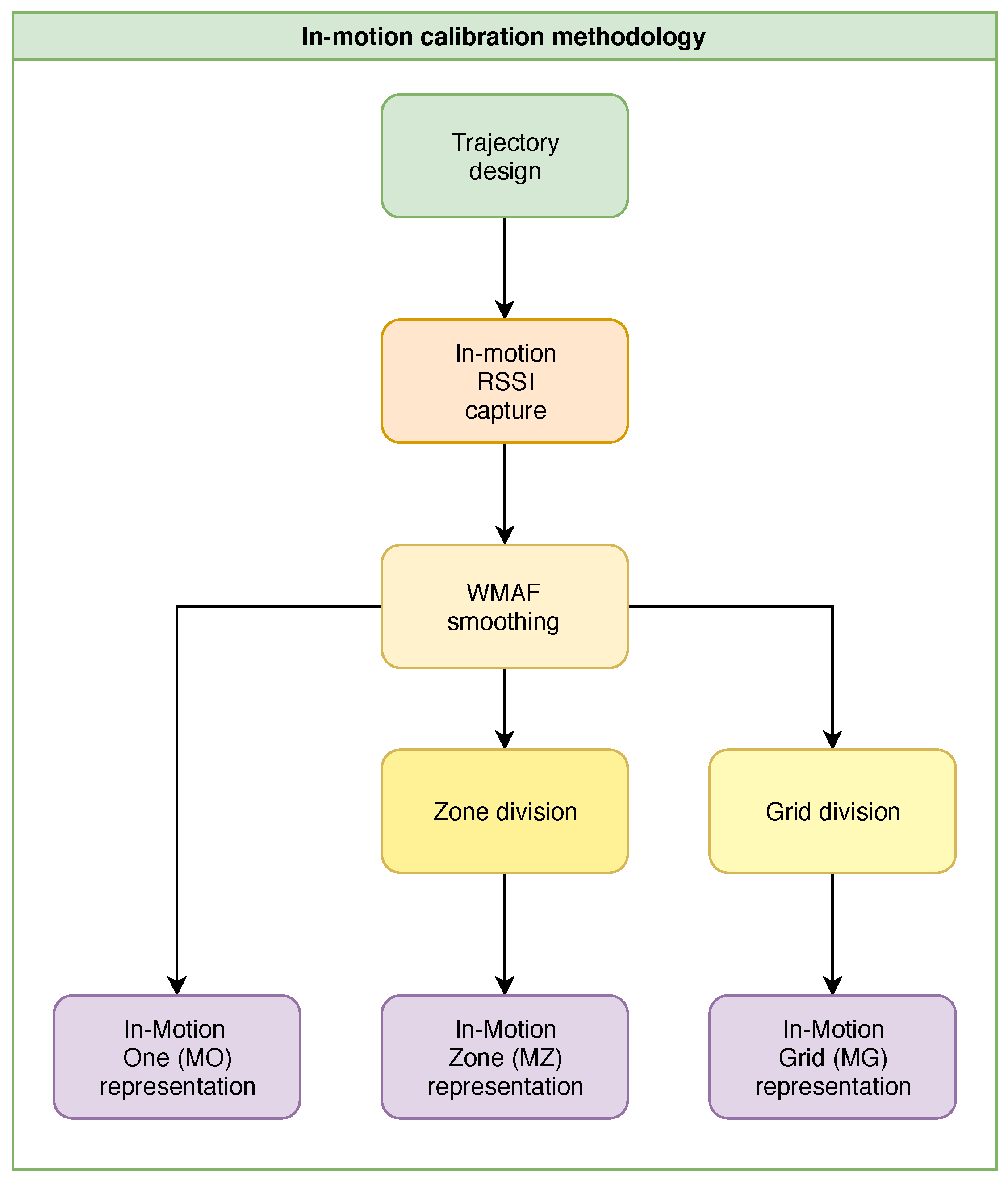
Section 3 demonstrated, the in-motion signal behaviour needs to be included in the calibration methodology in order to obtain a more illustrative signal propagation representation. This section presents a calibration methodology that incorporates the in-motion behavior into the calibration process. The entire methodology can be seen in
Figure 6.
To incorporate the in-motion signal behavior, the static calibration methodology has been redrafted. Instead of defining several measurement points throughout the environment and capturing the RSSI at each one separately, a trajectory is defined and traveled by a pedestrian holding a smartphone. The coordinates of each sample are recorded. To do that, a synchronized auxiliary localization system can be used. If this is not possible, the trajectory can be designed by defining several control points and interpolating the positions between two consecutive control points.
The resulting in-motion capture, which is composed of the (RSSI, distance) tuples of all points in the trajectory, is subsequently used to compute the path loss exponent evolution, previous smoothing as stated in
Section 3. In this way, one path loss exponent value for each trajectory point is computed using Equation (
1). Finally, three Wi-Fi signal propagation representations are proposed: in-Motion One (MO), in-Motion Zone (MZ) and in-Motion Grid (MG).
4.2.1. In-Motion One Representation
A single path loss exponent value is obtained for each AP by averaging all values of the path loss exponent evolution.
4.2.2. In-Motion Zone Representation
The environment is divided into several zones according to environment structural changes, following our previous approach [
8]. Then, a path loss exponent value for each combination of zone and AP is computed by averaging the values of the path loss exponent evolution that belong to the zone. To do that, the position of each RSSI measurement is used.
4.2.3. In-Motion Grid Representation
The path loss exponent is a distance-dependent parameter, as stated in the in-motion signal behavior analysis (
Section 3). The zone-based representations are able to describe both LOS and NLOS situations, however, they are not able to describe the in-motion path loss exponent evolution within a zone. For this reason, a grid-based representation which enables a progressive evolution both throughout the environment and within a zone is proposed.
The environment is divided into several
-meter-side square cells. Then, each cell receives its own path loss exponent value using the Kriging interpolation technique. This interpolation technique has been widely used in closely related areas, such as wireless sensor networks [
25], and precision agriculture [
26] among others. Kriging extends the simplistic distance method by a realistic spatial correlation model. It determines the experimental variogram defined as a sampling function of a phenomenon and the distance between the corresponding sampling location.
5. Particle-Filter-Based Indoor Tracking Algorithm
In this section, we present the indoor tracking algorithm of our system, which is based on a particle filter able to incorporate the proposed calibration methodologies. A particle filter uses the Bayesian theory to sequentially process signals likely to contain noise in order to estimate a time-based system state.
The indoor tracking problem can be modeled using a particle filter localization approach, specifically using the Monte Carlo Localization (MCL) algorithm, by defining the system state as:
which represents the Cartesian coordinates of the smartphone inside the target environment, at time step
t.
The particle filter estimates the posterior distribution of the state based on some noisy-likely measurements , that is . In our case is represented by the RSSI captures of each AP.
In sampling-based methods the density is represented by a set of N random samples or particles drawn from it, where is the system state and is the weight (likelihood) of the i-th particle at time t.
A particle filter is typically defined by three iterative steps after the particle initialization: motion update, measurement update and resampling. In this work, we have redrafted the measurement update step, introducing the RSSI estimation into this process. In addition, a new step before the resampling step called as current state estimation has been included. This step provides explicitly the user position estimation for every time t in order to be able to track the trajectory of the user.
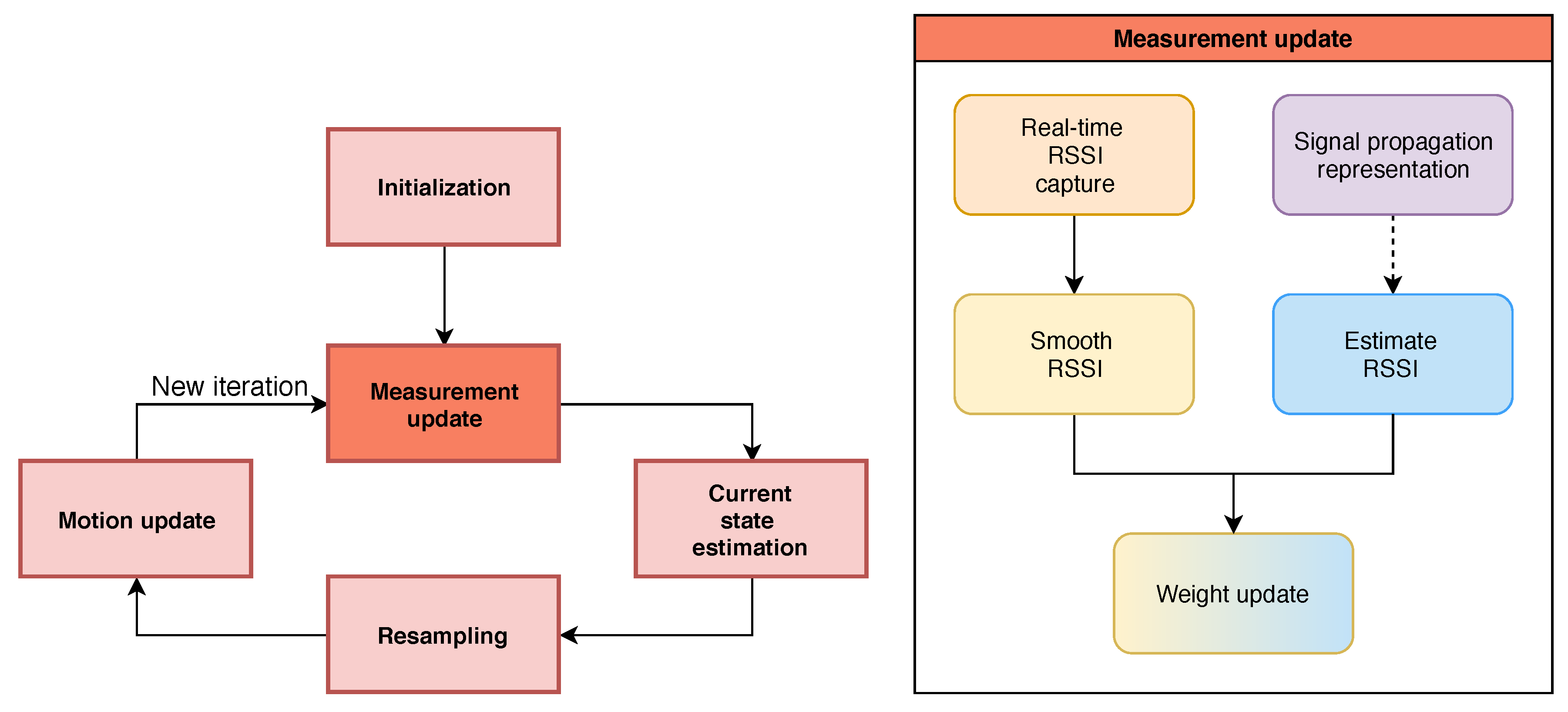
The entire workflow of the designed indoor tracking algorithm can be seen in
Figure 7 (left). The following sections explain all steps involved into this method.
5.1. Initialization
The initialization deploys randomly several (
N) particles along the environment and set the particle’s weights uniformly. That is, for
:
5.2. Measurement Update
The measurement update step computes the probability distribution function (PDF) of the particles based on
measurements and particles position. Traditionally, this process can be expressed as:
In order to make the state estimation as realistic as possible, the measurement update step has been redrafted. First, the algorithm estimates the RSSI of all APs in each particle position
using a particular signal propagation representation. This can be done since both particle positions and AP’s positions are known. Moreover, the
measurements are smoothed using a Window Moving Average Filter in order to reduce the Wi-Fi signal noise. Both filtered RSSI and estimated RSSI are subsequently used to compute the weight of each particle, as can be seen in
Figure 7 (right).
Finally, a weight normalization is needed in order to define a probability distribution over the weights:
5.3. Current State Estimation
The current state estimation (i.e., the current smartphone/user position), denoted by
, is obtained based on both particle positions and weights of current time
t. First, the particle set is sorted in descending order according to particle’s weights. Then, the state estimation is computed using a weight-weighted average of the
M more-likely particles:
5.4. Resampling
The resampling is the process of selecting the next population of particles . The selection is adopted to eliminate particles with small weights by replacing them by high-weight particles, following the Monte Carlo’s selection. More formally the resampling process consists of building the set drawing N particles from with probability .
5.5. Motion Update
The last step of a particle filter iteration is the motion update. The position of each selected particle is modified in order to apply the device’s motion, usually using a step counter and a heading estimator. Since these measurements cannot be extracted from Wi-Fi technology, a random motion update is applied.
6. Experimental Results
In this section, we show the results of the experiments carried out to evaluate the indoor tracking system. The primary goal of the experiments is to determine the best calibration methodology to be used in deploying an indoor tracking system for smartphones. To reach this goal, we compare both static and in-motion signal propagation representations in terms of (1) suitability of the signal propagation representation and (2) tracking accuracy in meters.
6.1. Environment Definition
We set up our experimental platforms in one of the labs of the Albacete Research Institute of Informatics, University of Castilla-La Mancha, Spain. The lab layout and dimensions are similar to those used in comparable research studies [
27].
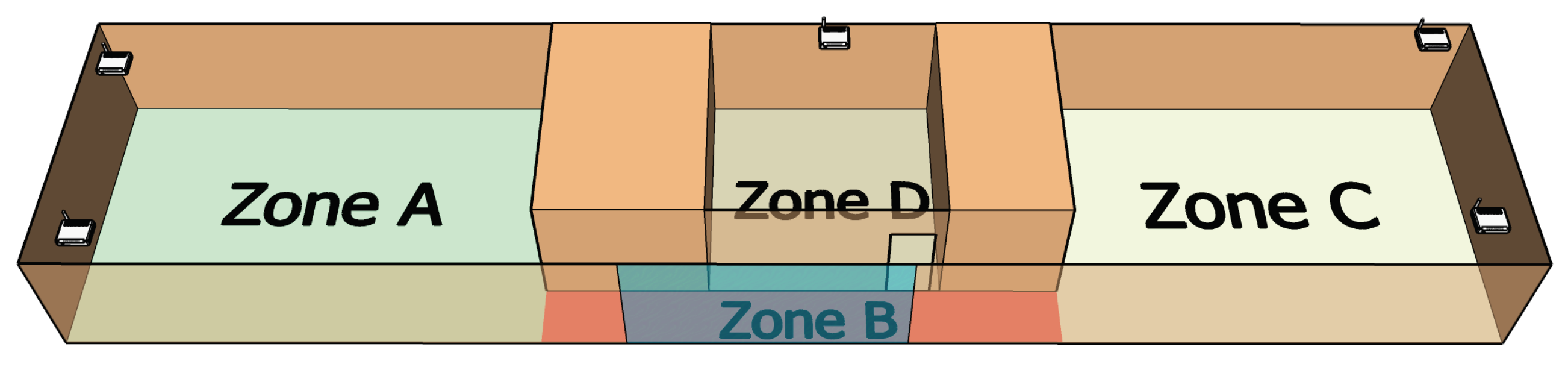
Figure 8 shows the floor plan of the lab. The lab dimensions are
m long and
m wide, i.e., the total area is
m
The benchmark lab is divided into four accessible zones, identified in the Figure by capital letters A, B, C, and D; and two professor offices which were intentionally non-accessible during our experimental sessions. This division was made in that way with the only purpose of making the environment as realistic as possible, in which we will typically have to deal with non-public access areas. More specifically, zones A and C, are two computer labs of 9 m long and 6 m wide, each. Zone B, is a corridor of m long and m wide. Zone C is a meeting room of 5 m long and 5 m wide. The two computer labs are furnished with tables located against the walls. The meeting room is furnished with a table and chairs placed in the middle.
As shown in
Figure 8, our experimental wiress platform consisted of five wireless APs. All five APs were of the brand TP-LINK AC1750 Archer C7 implementing the IEEE 802.11ac standard. The number of APs as well as the position of each one in the enviroment have been selected following the recommendations provided by major manufacturers [
28] on the deployment of Wi-Fi-based location services. First, the recommendations state that the APs should be installed in every corner of the environment and additional APs may be included in areas where accuracy is desired to be improved. In addition, for devices to be tracked properly, at least three APs should be detected in each position of the environment with a RSSI greater than
dBm. Furthermore, in order to ensure LOS situations for each AP in the zone they are placed, the APs should be placed in the ceiling. In our case, we have placed one AP at each corner and another one in the central meeting room, all of them in the ceiling.
6.2. Experimental Setup
In order to evaluate all proposed calibration methodologies in a real-world scenario, both static and in-motion calibration methodologies have been carried out. To do that, two RSSI capturing processes to be executed using a LG Nexus 5 as a capture device have been designed.
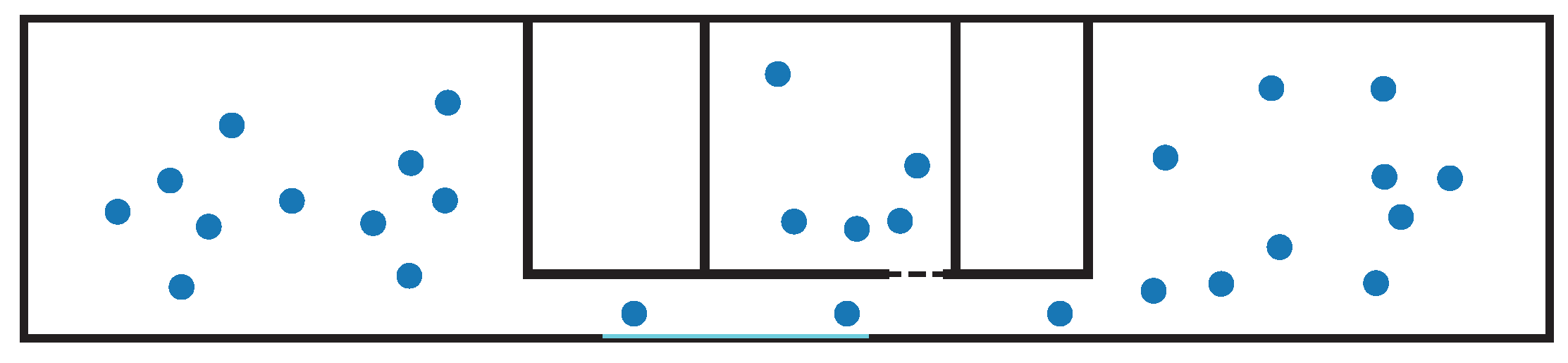
The static RSSI capturing process is performed by gathering the RSSI value in 30 static measurement points, whose coordinates can be seen in
Figure 9. The measurement points have been distributed based on the area of each zone. In this way, zones A and C have 11 measurements points each. Zones B and D have three and five measurements points, respectively. The pedestrian who holds the smartphone remains stationary in each measurement point during one minute while the smartphone is capturing RSSI.
The in-motion RSSI capturing process is carried out by traveling a designed trajectory covering most of our target environment, which can be seen in
Figure 10, while the capture device is gathering the RSSI. The trajectory is traveled two times to carry out two in-motion captures. The differences between the two in-motion captures are the starting point (which is the same that the final point) and the followed direction, as can be seen in
Figure 10. The trajectory shown on left is used to perform the calibration/training stage, while the one shown on the right is used to test the indoor tracking system.
The resulting static capture and in-motion calibration capture are subsequently used to build two static and three in-motion signal propagation representations following the instructions specified in
Section 4. As stated above, static signal propagation representations are Static One (SO) and Static Zone (SZ), while in-motion signal propagation representations are in-Motion One (MO), in-Motion Zone (MZ) and in-Motion Grid (MG).
6.3. Comparison of Signal Propagation Representations
In this section, we present a comparison between the outputs (i.e., path loss exponent values) of both static and in-motion calibration methodologies in order to assess the suitability of signal propagation representations. Despite the path loss exponent values are unitless, all of them are expected to be in the range [2,3], proposed in [
7]. In addition, and as observed in the experimental results carried out in this paper, the higher distance to an AP, the higher path loss exponent value.
First, we compare the path loss exponent values of both one-based signal propagation representations, which can be seen in
Table 1. All in-motion representation values are inside the expected range, while static representation values are not. Therefore, static representation is expected to achieve very low tracking accuracy.
Furthermore, both zone-based signal propagation representations are compared. This comparison can be seen in
Table 2. The bold-marked values correspond to a LOS situation, where the minimum value of the representation is expected to be obtained. In-motion representation always achieves the expected behaviour, while static representation do not in all cases. For instance, the static representation minimum value is only obtained correctly for AP3.
From the results, we can conclude that in-motion calibration representations exhibit the desired path loss exponent behavior. In contrast, although our previous work demonstrated the static calibration methodology improves the RSSI estimation, the static calibration representations are incoherent. This is due to the fact that our previous work made use of Raspberry devices, whose signal dispersion is much smaller than the smartphone signal dispersion. Therefore, the proposed in-motion calibration methodology is capable of representing correctly the path loss exponent behavior using a high signal-dispersed device.
6.4. Tracking Accuracy
In this section, the tracking accuracy in meters of both static and in-motion calibration methodologies is shown. Each signal propagation representation is used by the particle filter to estimate the trajectory of the device from the in-motion tracking capture.
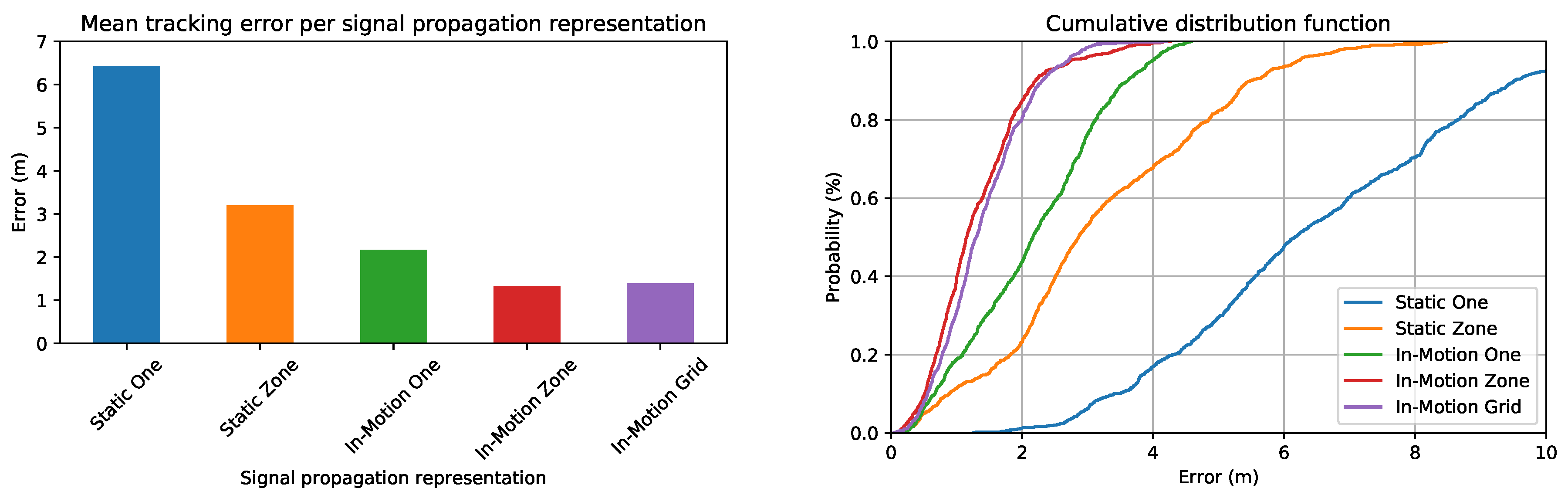
The tracking accuracy results of all signal propagation representations can be seen in
Figure 11. The left figure shows the mean tracking error of each signal propagation representation, while the right figure shows the cumulative distribution function of each signal propagation representation. In-motion signal propagation representations obtain more robust and accurate localization results, as expected from the conclusions of previous section. In addition, zone-based representations outperform one-based representations, due to the tracking algorithm has more representative information about signal propagation. Finally, there are insignificant differences between grid-based and zone-based in-motion signal propagation representations.
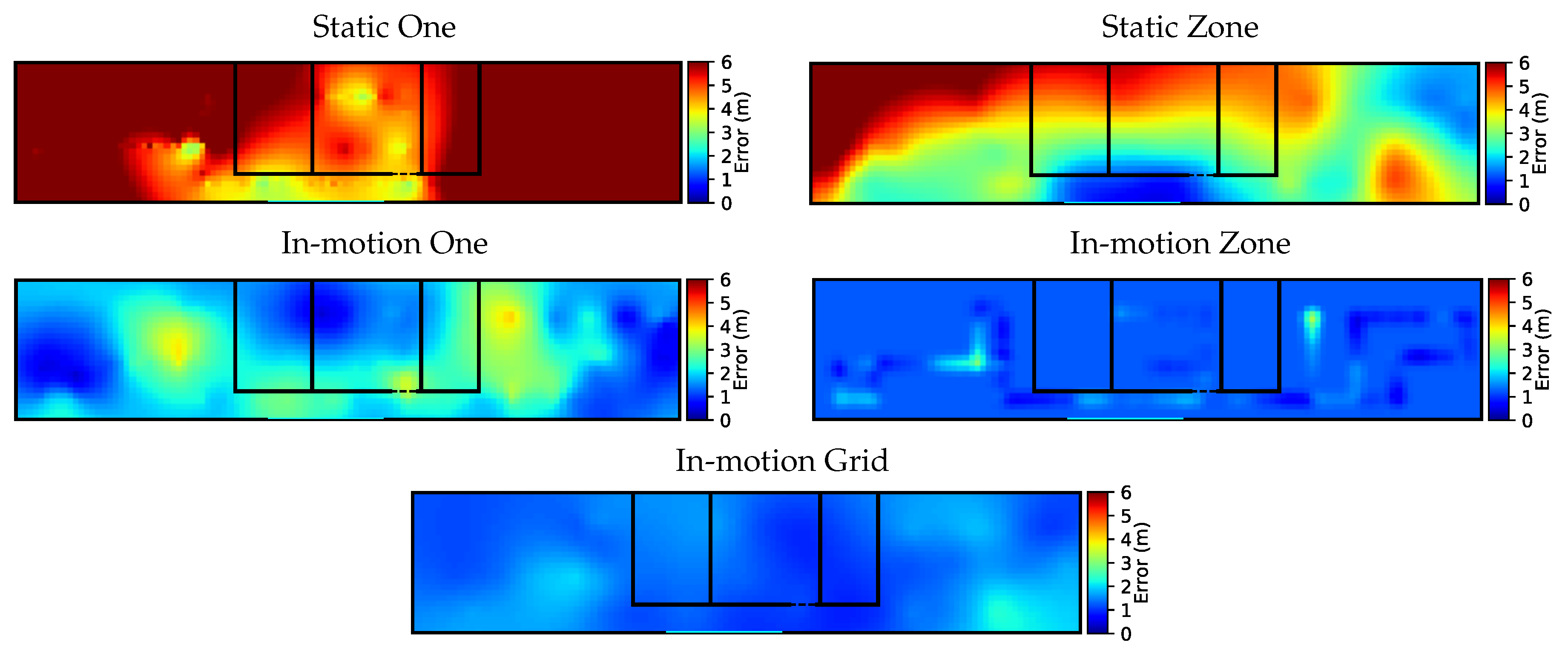
The tracking algorithm results are also depicted in
Figure 12 as a heat-map in order to represent the tracking error in meters along the whole environment. The uncovered areas by in-motion trajectory has been interpolated using the Kriging algorithm. The maps show the improvement achieved by in-motion representations in comparison with static representations. While static one representation presents a mean error over 6 m in almost entire environment, both grid-based and zone-based in-motion calibration representations exhibit a mean error close to
m.
7. Conclusions
In this paper, we have studied the in-motion Wi-Fi signal behavior using a smartphone perspective in order to design an indoor tracking system calibration methodology to be used by such devices. Based on this study, an in-motion calibration methodology, which creates three different signal propagation representations from an in-motion RSSI capture, has been proposed. In order to cope with the inherent noise of Wi-Fi signals, a Window Moving Average Filter is applied to the raw RSSI capture. In addition, a particle filter particularly tailored based on our approach has been implemented to perform the tracking stage.
The whole indoor tracking system has been evaluated in a multi-room office laboratory of m using the proposed static and in-motion calibration methodologies. Based on our experimental results, the in-motion calibration methodology outperforms the tracking accuracy achieved by motion-free (static) calibration methodology. This is due to the lack of motion in the calibration process causes a misrepresentation of the actual signal propagation in indoor scenarios.
As a future work, we propose the incorporation of another information source such as smartphone’s Inertial Measurement Units or Bluetooth technology. The first one is able to estimate the smartphone’s motion, which can be incorporated to the particle-filter-based tracking algorithm in order to update the motion. The second one can help to define areas where the smartphone is more likely to be found. In addition, we are interested in the calibration of new smartphones based on the signal propagation representations proposed in this paper and the real-time modification of such representations in order to cope with signal propagation changes of Wi-Fi signal. Furthermore, in order for our indoor tracking system to be reproducible in other environments, both the selection and placement of APs will be evaluated in future works.
Author Contributions
Conceptualization, M.M.d.H., L.O.B. and I.G.-V.; Methodology, M.M.d.H., L.O.B. and I.G.-V.; Software, M.M.d.H.; Validation, M.M.d.H., L.O.B. and I.G.-V.; Formal analysis, M.M.d.H., L.O.B. and I.G.-V.; Investigation, M.M.d.H., L.O.B. and I.G.-V.; Resources, L.O.B. and I.G.-V.; Data curation, M.M.d.H.; Writing-original draft preparation, M.M.d.H.; Writing-review and editing, M.M.d.H., L.O.B. and I.G.-V.; Visualization, M.M.d.H.; Supervision, L.O.B. and I.G.-V.; Project administration, M.M.d.H., L.O.B. and I.G.-V.; Funding acquisition, L.O.B. and I.G.-V.
Funding
This work has been partially funded by the Spanish Ministry of Economy and Competitiveness under Grant numbers TIN2015-66972-C5-2-R and TIN2015-65686-C5-3-R, and by the Regional Council of Education, Culture and Sports of Castilla-La Mancha under grant number SBPLY/17/180501/000493, supported with FEDER funds. Miguel Martínez del Horno is also funded by the Universidad de Castilla-La Mancha grant 2016/14100.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.; Xie, L. Fusion of WiFi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Sun, G.; Chen, J.; Guo, W.; Liu, K. Signal processing techniques in network-aided positioning: A survey of state-of-the-art positioning designs. IEEE Signal Process. Mag. 2005, 22, 12–23. [Google Scholar]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Spachos, P.; Papapanagiotou, I.; Plataniotis, K.N. Microlocation for Smart Buildings in the Era of the Internet of Things: A Survey of Technologies, Techniques, and Approaches. IEEE Signal Process. Mag. 2018, 35, 140–152. [Google Scholar] [CrossRef]
- Hashemi, H. The indoor radio propagation channel. Proc. IEEE 1993, 81, 943–968. [Google Scholar] [CrossRef]
- Castillo-Cara, M.; Lovón-Melgarejo, J.; Bravo-Rocca, G.; Orozco-Barbosa, L.; García-Varea, I. An empirical study of the transmission power setting for bluetooth-based indoor localization mechanisms. Sensors 2017, 17, 1318. [Google Scholar] [CrossRef] [PubMed]
- Rappaport, T. Wireless Communications, Principles and Practices; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Martínez-Gómez, J.; Martinez del Horno, M.; Castillo-Cara, M.; Brea Lujan, V.M.; Barbosa, L.O.; García-Varea, I. Spatial statistical analysis for the design of indoor particle-filter-based localization mechanisms. Int. J. Distrib. Sens. Netw. 2016, 12. [Google Scholar] [CrossRef]
- Zhou, G.; He, T.; Krishnamurthy, S.; Stankovic, J.A. Models and solutions for radio irregularity in wireless sensor networks. ACM Trans. Sens. Netw. (TOSN) 2006, 2, 221–262. [Google Scholar] [CrossRef]
- Zhang, R.B.; Guo, J.G.; Chu, F.H.; Zhang, Y.C. Environmental-adaptive indoor radio path loss model for wireless sensor networks localization. AEU-Int. J. Electron. Commun. 2011, 65, 1023–1031. [Google Scholar] [CrossRef]
- Belmonte-Hernández, A.; Hernández-Peñaloza, G.; Álvarez, F.; Conti, G. Adaptive fingerprinting in multi-sensor fusion for accurate indoor tracking. IEEE Sens. J. 2017, 17, 4983–4998. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y.; Xue, W. Unsupervised Indoor Localization Based on Smartphone Sensors, iBeacon and Wi-Fi. Sensors 2018, 18, 1378. [Google Scholar] [CrossRef] [PubMed]
- Booranawong, A.; Sengchuai, K.; Jindapetch, N. Implementation and test of an RSSI-based indoor target localization system: Human movement effects on the accuracy. Measurement 2019, 133, 370–382. [Google Scholar] [CrossRef]
- Zou, H.; Lu, X.; Jiang, H.; Xie, L. A fast and precise indoor localization algorithm based on an online sequential extreme learning machine. Sensors 2015, 15, 1804–1824. [Google Scholar] [CrossRef]
- Du, J.; Diouris, J.F.; Wang, Y. A RSSI-based parameter tracking strategy for constrained position localization. EURASIP J. Adv. Signal Process. 2017, 2017, 77. [Google Scholar] [CrossRef]
- Lott, M.; Forkel, I. A multi-wall-and-floor model for indoor radio propagation. In Proceedings of the IEEE VTS 53rd Vehicular Technology Conference, Spring 2001. Proceedings, Rhodes, Greece, 6–9 May 2001; Volume 1, pp. 464–468. [Google Scholar]
- Cheung, K.W.; Sau, J.M.; Murch, R. A new empirical model for indoor propagation prediction. IEEE Trans. Veh. Technol. 1998, 47, 996–1001. [Google Scholar] [CrossRef]
- Mao, G.; Anderson, B.D.; Fidan, B. Path loss exponent estimation for wireless sensor network localization. Comput. Netw. 2007, 51, 2467–2483. [Google Scholar] [CrossRef]
- Mazuelas, S.; Lago, F.A.; González, D.; Bahillo, A.; Blas, J.; Fernandez, P.; Lorenzo, R.M.; Abril, E.J. Dynamic estimation of optimum path loss model in a RSS positioning system. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 679–684. [Google Scholar]
- Rodas, J.; Escudero, C.J. Dynamic path-loss estimation using a particle filter. Int. J. Comput. Sci. Issues 2010, 7, 1. [Google Scholar]
- Laoudias, C.; Moreira, A.; Kim, S.; Lee, S.; Wirola, L.; Fischione, C. A survey of enabling technologies for network localization, tracking, and navigation. IEEE Commun. Surv. Tutor. 2018, 20, 3607–3644. [Google Scholar] [CrossRef]
- Carrera Villacrés, J.L.; Zhao, Z.; Braun, T. Discriminative Learning-based Smartphone Indoor Localization. arXiv 2018, arXiv:1804.03961. [Google Scholar]
- Hamida, E.B.; Chelius, G. Investigating the impact of human activity on the performance of wireless networks—An experimental approach. In Proceedings of the 2010 IEEE International Symposium on “A World of Wireless Mobile and Multimedia Networks” (WoWMoM), Montrreal, QC, Canada, 14–17 June 2010; pp. 1–8. [Google Scholar]
- Perez-Vega, C.; Garcia, J.L.G. A simple approach to a statistical path loss model for indoor communications. In Proceedings of the 1997 27th European Microwave Conference, Jerusalem, Israel, 8–12 September 1997; Volume 1, pp. 617–623. [Google Scholar]
- Umer, M.; Kulik, L.; Tanin, E. Spatial interpolation in wireless sensor networks: Localized algorithms for variogram modeling and Kriging. Geoinformatica 2010, 14, 101–134. [Google Scholar] [CrossRef]
- Ku, W. Application of Regression Kriging on the Spatial Prediction of Total Soil Nitrogen. Chin. Agric. Sci. Bull. 2013, 20, 029. [Google Scholar]
- Mazuelas, S.; Bahillo, A.; Lorenzo, R.; Fernandez, P.; Lago, F.; Garcia, E.; Blas, J.; Abril, E. Robust Indoor Positioning Provided by Real-Time RSSI Values in Unmodified WLAN Networks. J. Sel. Top. Signal Process. 2009, 3, 821–831. [Google Scholar] [CrossRef]
- Cisco Systems. Wi-Fi Location-Based Services 4.1 Design Guide. 2008. Available online: https://www.cisco.com/c/en/us/td/docs/solutions/Enterprise/Mobility/WiFiLBS-DG.pdf (accessed on 20 March 2019).
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}