Estimation of Forest Structural Attributes Using Spectral Indices and Point Clouds from UAS-Based Multispectral and RGB Imageries



Abstract
1. Introduction
2. Materials and Methods
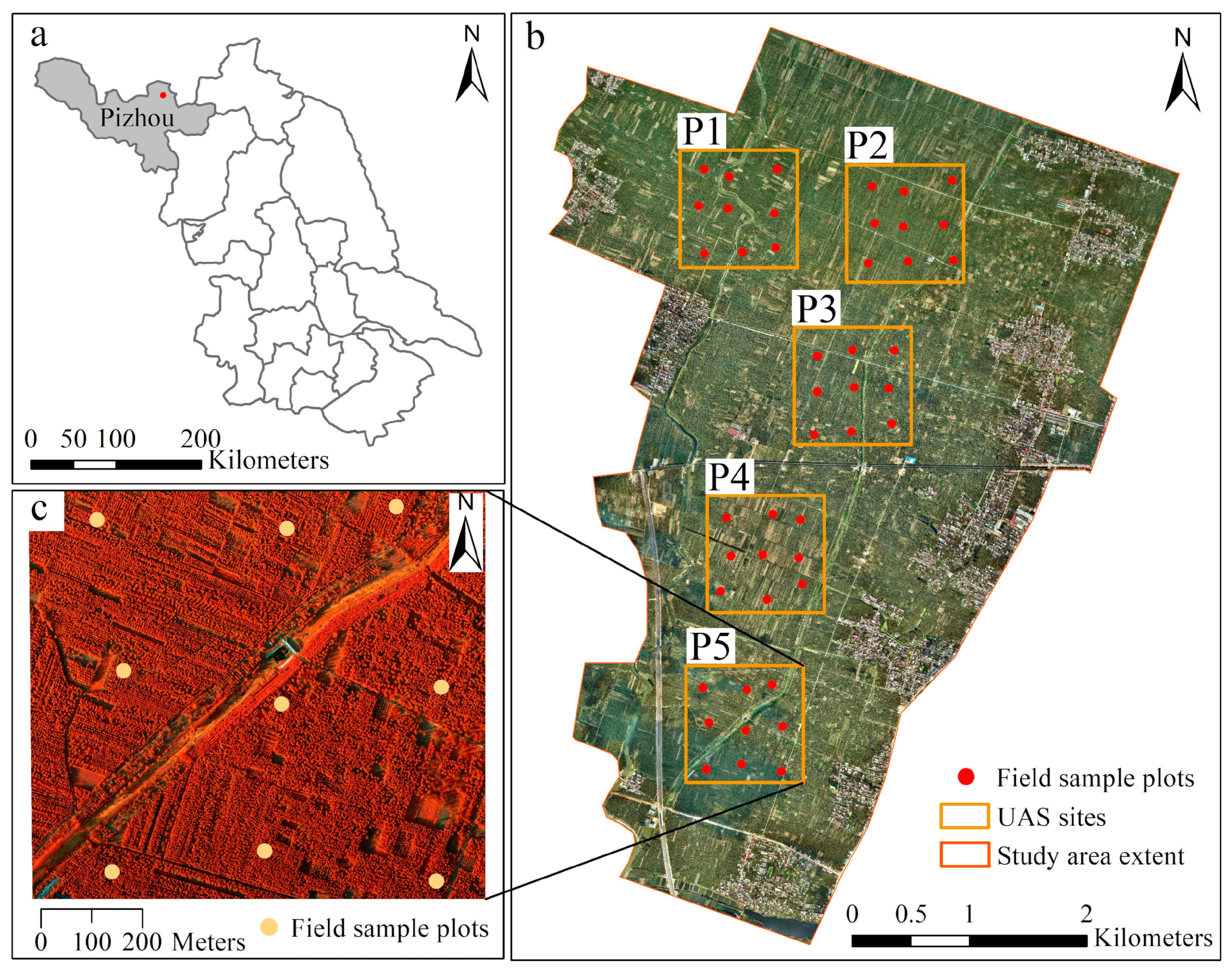
2.1. Study Area
2.2. Field Data
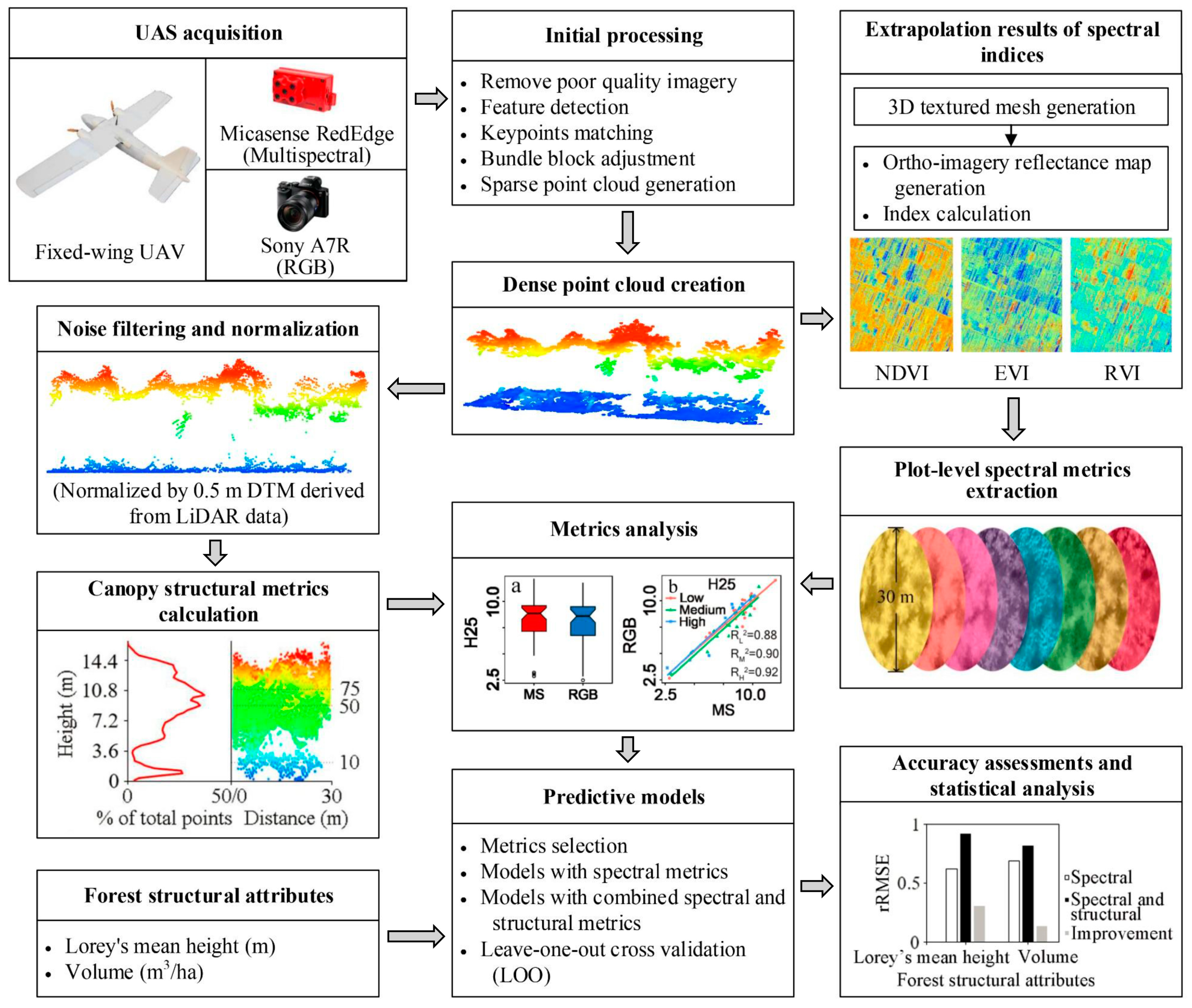
2.3. Remote Sensing Data
2.4. Data Pre-Processing
2.5. Point Cloud Processing
2.6. Image Processing
2.7. Statistical Analysis and Modeling
3. Results
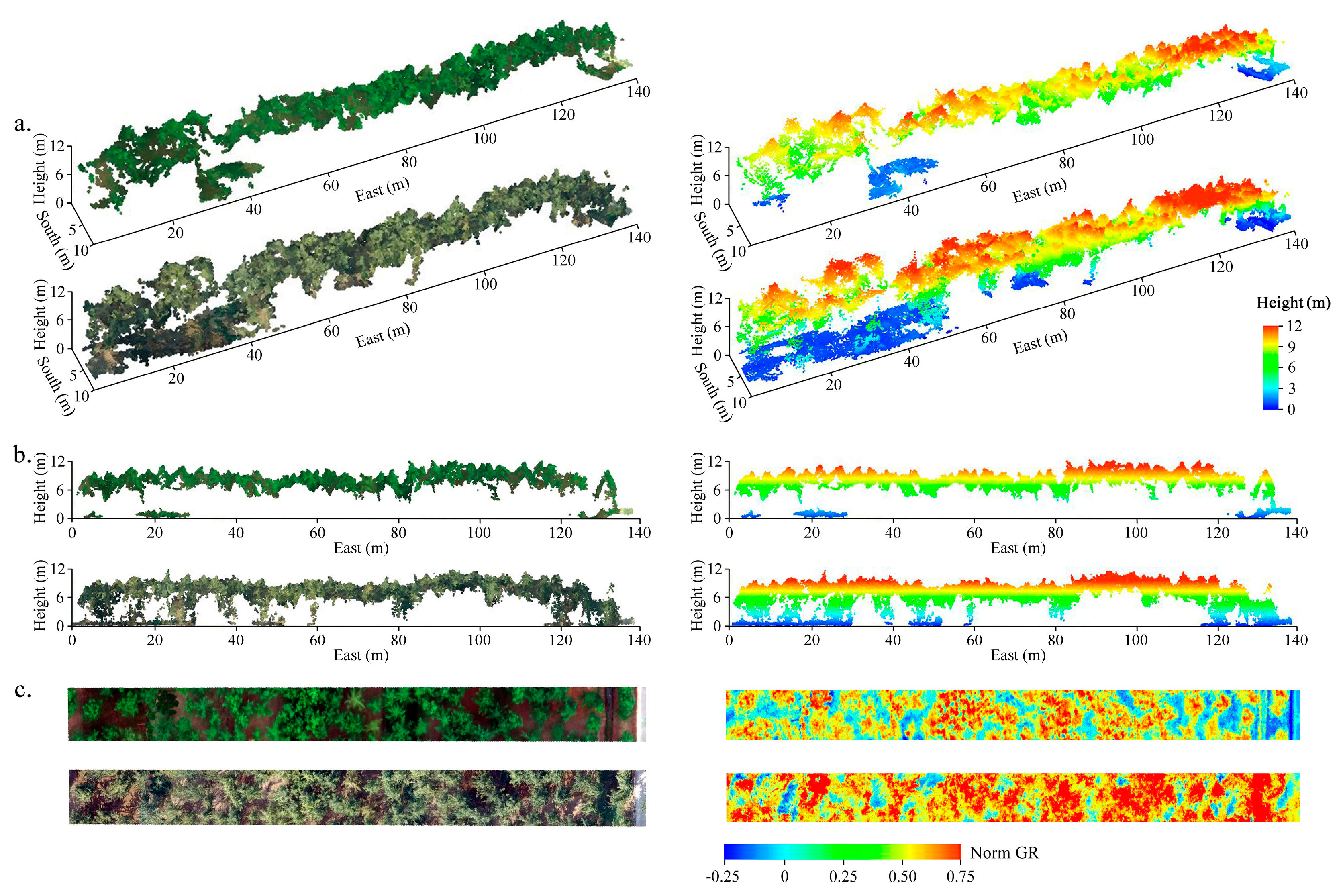
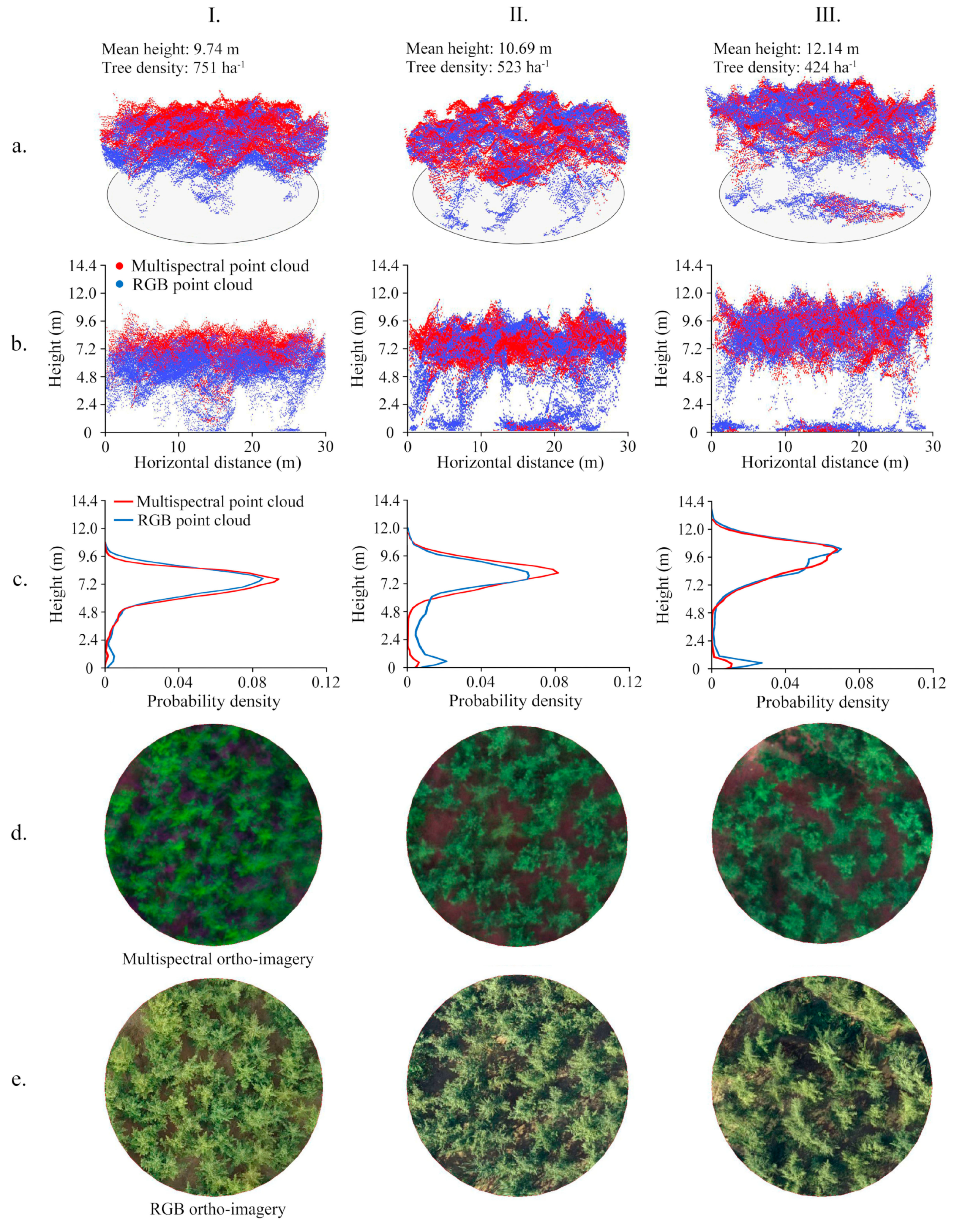
3.1. DAP Point Clouds and Reflectance Imageries Generation
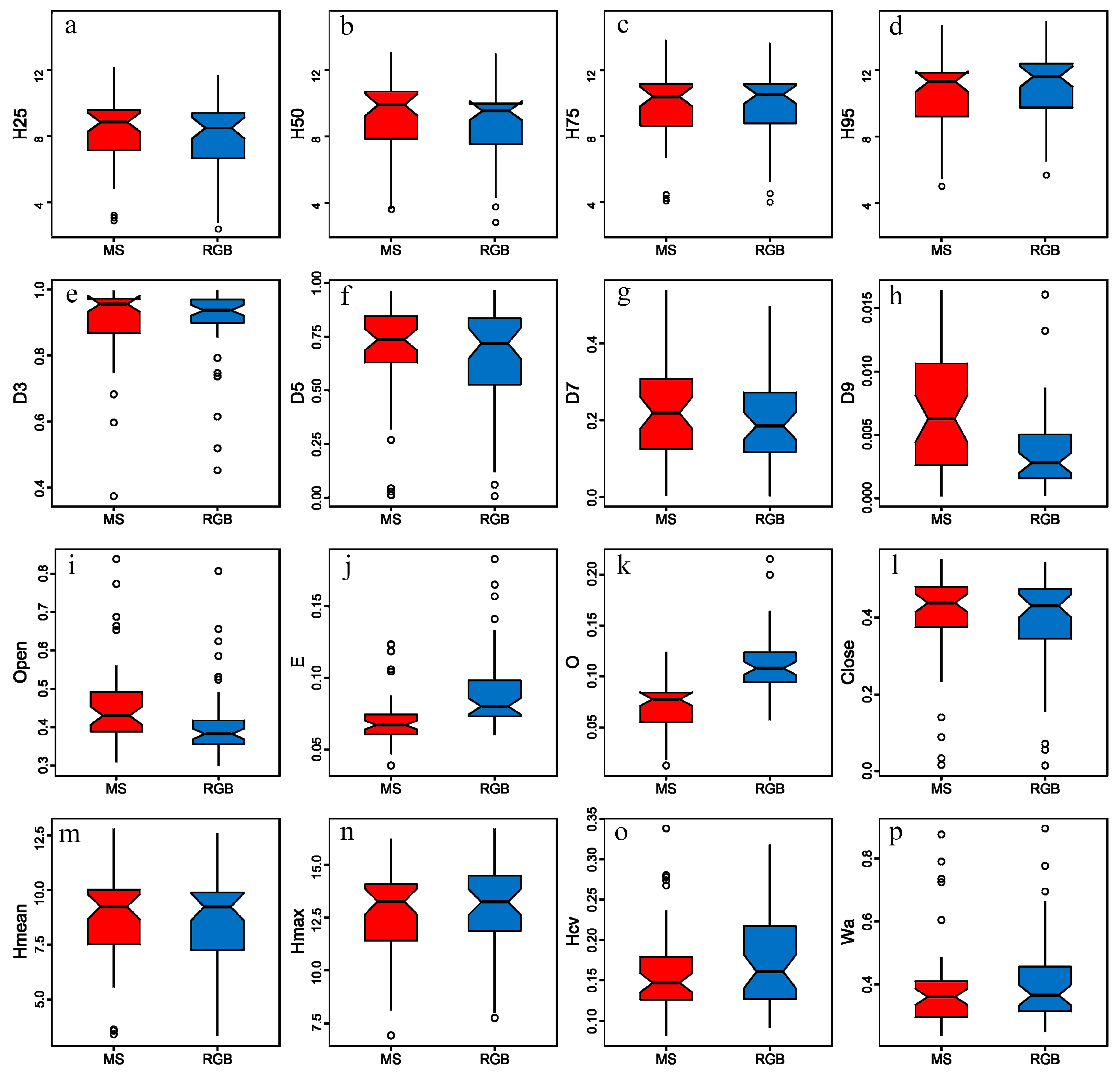
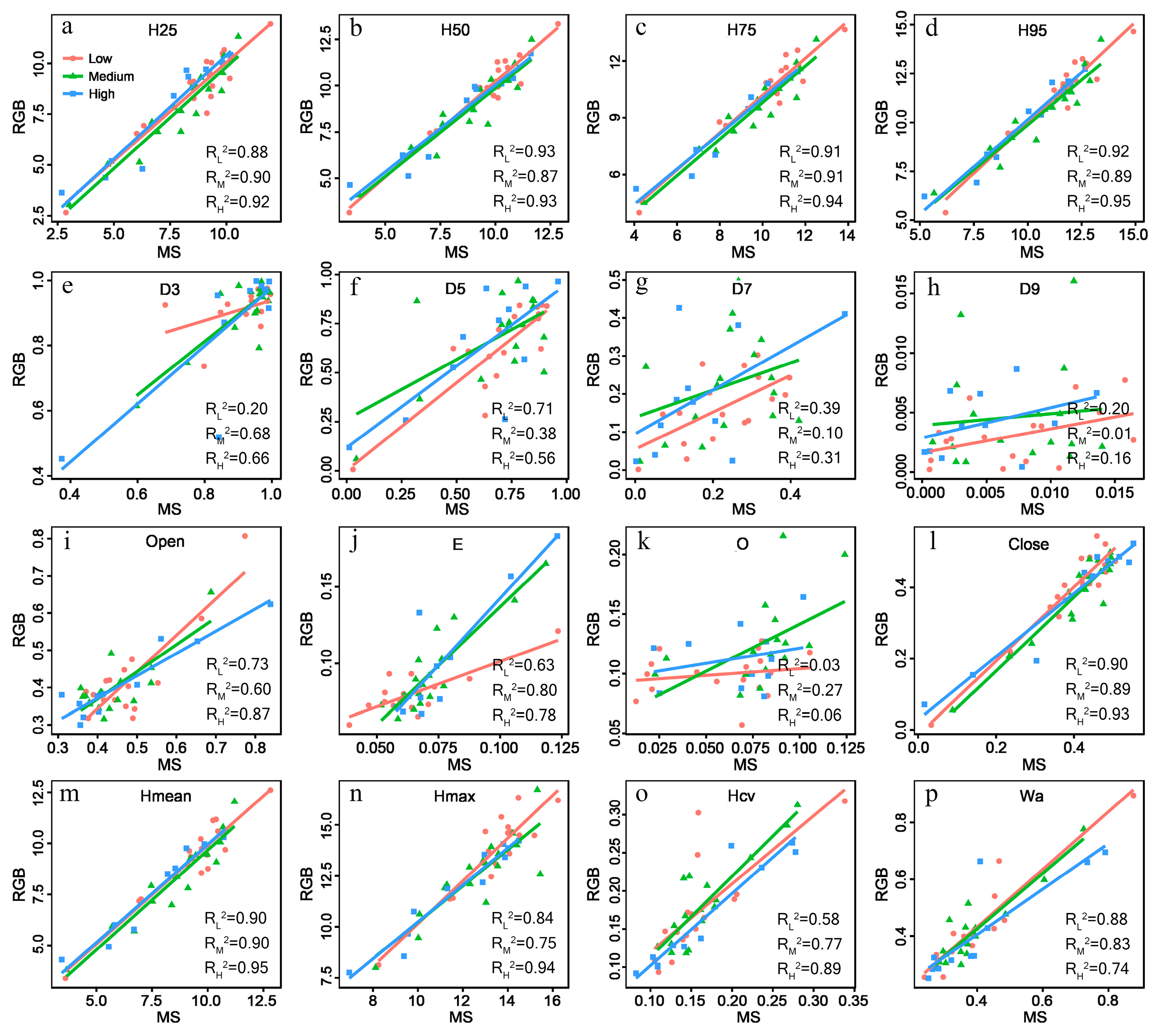
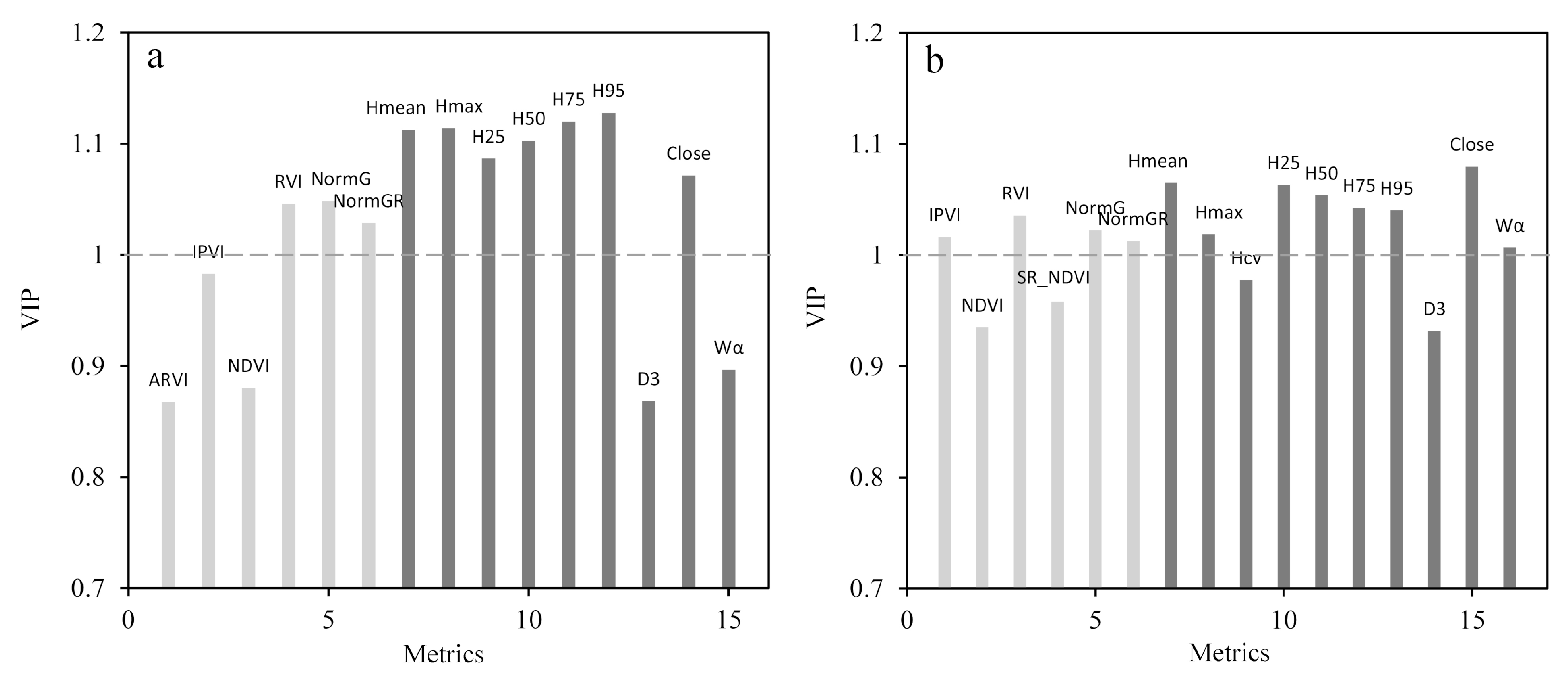
3.2. Structural Metrics Extraction and Analysis
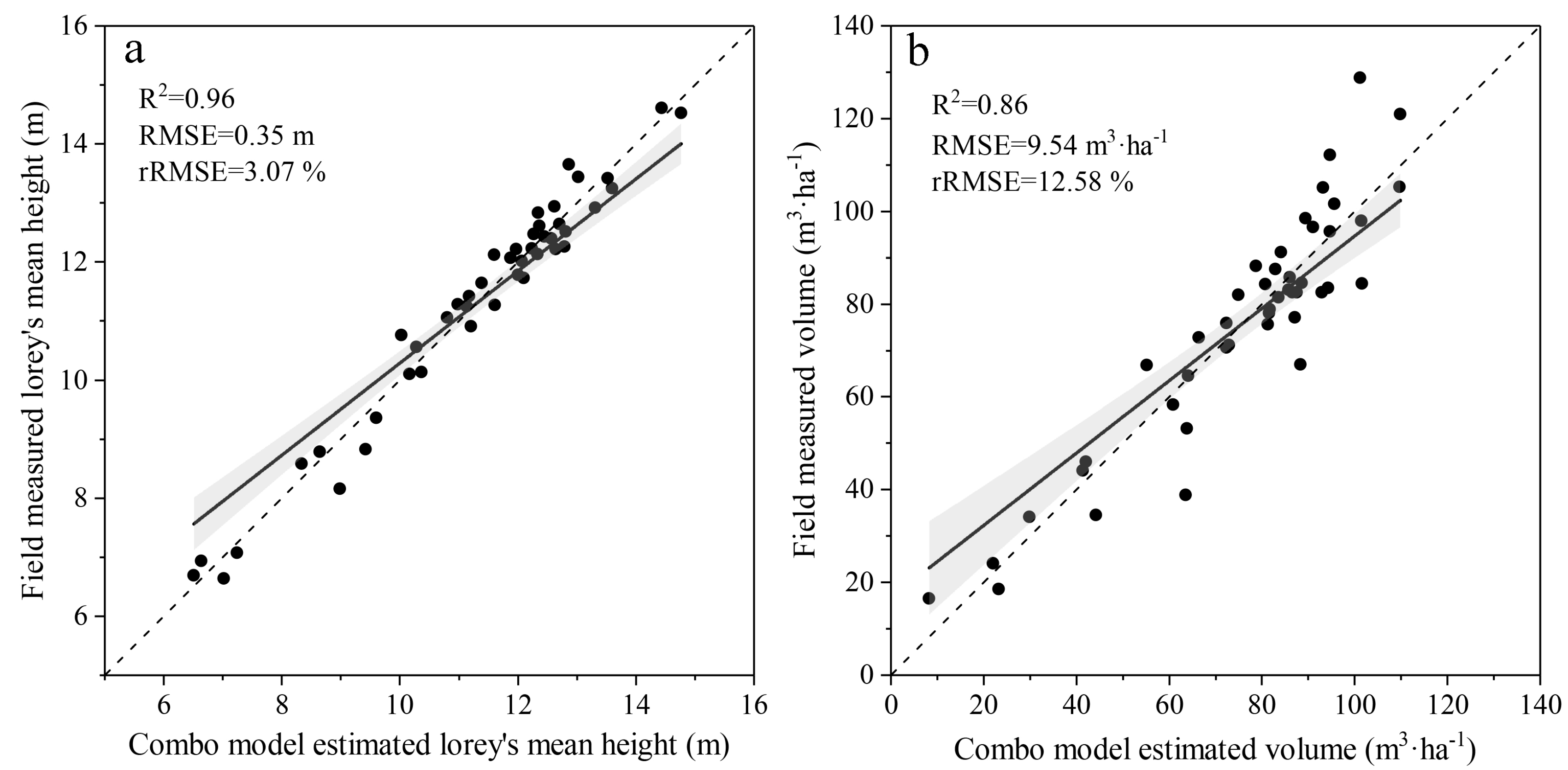
3.3. Forest Structural Attributes Modeling
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A


References
- Food and Agriculture Organization. Global Forest Resources Assessment 2015—How Are the World’s Forests Changing? FAO: Rome, Italy, 2015; ISBN 9789251092835. [Google Scholar]
- Kollert, W.; Liu, S.; Payn, T.; Carnus, J.-M.; Silva, L.N.; Freer-Smith, P.; Orazio, C.; Rodriguez, L.; Wingfield, M.J.; Kimberley, M. Changes in planted forests and future global implications. For. Ecol. Manag. 2015, 352, 57–67. [Google Scholar] [CrossRef]
- Carnus, J.-M.; Parrotta, J.A.; Brockerhoff, E.G.; Arbez, M.; Jactel, H.; Kremer, A.; Lamb, D.; O’Hara, K.; Walters, B. Planted forests and biodiversity. J. For. 2006, 104, 65–77. [Google Scholar] [CrossRef]
- Brin, A.; Payn, T.W.; Paquette, A.; Brockerhoff, E.G.; Pawson, S.M.; Parrotta, J.A.; Lamb, D. Plantation forests, climate change and biodiversity. Biodivers. Conserv. 2013, 22, 1203–1227. [Google Scholar] [CrossRef]
- Spies, T. A Forest Structure: A Key to the Ecosystem. Northwest Sci. 1998, 72, 34–39. [Google Scholar] [CrossRef]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Zhao, M.; Zhou, G.S. Estimation of biomass and net primary productivity of major planted forests in China based on forest inventory data. For. Ecol. Manag. 2005, 207, 295–313. [Google Scholar] [CrossRef]
- Tomppo, E.; Hagner, O.; Katila, M.; Olsson, H.; Ståhl, G.; Nilsson, M. Combining national forest inventory field plots and remote sensing data for forest databases. Remote Sens. Environ. 2008, 112, 1982–1999. [Google Scholar] [CrossRef]
- Andersen, H.-E.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Foody, G.M. Remote sensing of tropical forest environments: Towards the monitoring of environmental resources for sustainable development. Int. J. Remote Sens. 2003, 24, 4035–4046. [Google Scholar] [CrossRef]
- McRoberts, R.E.; Tomppo, E.O. Remote sensing support for national forest inventories. Remote Sens. Environ. 2007, 110, 412–419. [Google Scholar] [CrossRef]
- Meng, Q.; Cieszewski, C.; Madden, M. Large area forest inventory using Landsat ETM+: A geostatistical approach. ISPRS J. Photogramm. Remote Sens. 2009, 64, 27–36. [Google Scholar] [CrossRef]
- Shataee, S.; Kalbi, S.; Fallah, A.; Pelz, D. Forest attribute imputation using machine-learning methods and ASTER data: Comparison of k-NN, SVR and random forest regression algorithms. Int. J. Remote Sens. 2012, 33, 6254–6280. [Google Scholar] [CrossRef]
- Christensen, B.R. Use of UAV or remotely piloted aircraft and forward-looking infrared in forest, rural and wildland fire management: Evaluation using simple economic analysis. N. Z. J. For. Sci. 2015, 45, 16. [Google Scholar] [CrossRef]
- Otero, V.; Van De Kerchove, R.; Satyanarayana, B.; Martínez-Espinosa, C.; Fisol, M.A.B.; Ibrahim, M.R.B.; Sulong, I.; Mohd-Lokman, H.; Lucas, R.; Dahdouh-Guebas, F. Managing mangrove forests from the sky: Forest inventory using field data and Unmanned Aerial Vehicle (UAV) imagery in the Matang Mangrove Forest Reserve, peninsular Malaysia. For. Ecol. Manag. 2018, 411, 35–45. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Wallace, L.O.; Lucieer, A.; Watson, C.S. Assessing the Feasibility of Uav-Based Lidar for High Resolution Forest Change Detection. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B7, 499–504. [Google Scholar] [CrossRef]
- Zahawi, R.A.; Dandois, J.P.; Holl, K.D.; Nadwodny, D.; Reid, J.L.; Ellis, E.C. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biol. Conserv. 2015, 186, 287–295. [Google Scholar] [CrossRef]
- Chianucci, F.; Disperati, L.; Guzzi, D.; Bianchini, D.; Nardino, V.; Lastri, C.; Rindinella, A.; Corona, P. Estimation of canopy attributes in beech forests using true colour digital images from a small fixed-wing UAV. Int. J. Appl. Earth Obs. Geoinf. 2016, 47, 60–68. [Google Scholar] [CrossRef]
- Granholm, A.H.; Lindgren, N.; Olofsson, K.; Nyström, M.; Allard, A.; Olsson, H. Estimating vertical canopy cover using dense image-based point cloud data in four vegetation types in southern Sweden. Int. J. Remote Sens. 2017, 38, 1820–1838. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Sarmento, A.; Silva, J.; Nunes, A.; Correia, A.C.; Fontes, L.; Tomé, M.; Díaz-Varela, R. Using high resolution UAV imagery to estimate tree variables in Pinus pinea plantation in Portugal. For. Syst. 2016, 25, eSC09. [Google Scholar] [CrossRef]
- Rahlf, J.; Breidenbach, J.; Solberg, S.; Astrup, R. Forest parameter prediction using an image-based point cloud: A comparison of semi-ITC with ABA. Forests 2015, 6, 4059–4071. [Google Scholar] [CrossRef]
- Saarinen, N.; Vastaranta, M.; Näsi, R.; Rosnell, T.; Hakala, T.; Honkavaara, E.; Wulder, M.; Luoma, V.; Tommaselli, A.; Imai, N.; et al. Assessing Biodiversity in Boreal Forests with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2018, 10, 338. [Google Scholar] [CrossRef]
- White, J.C.; Stepper, C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparing ALS and image-based point cloud metrics and modelled forest inventory attributes in a complex coastal forest environment. Forests 2015, 6, 3704–3732. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Tompalski, P.; Crawford, P.; Day, K.J.K. Updating residual stem volume estimates using ALS- and UAV-acquired stereo-photogrammetric point clouds. Int. J. Remote Sens. 2017, 38, 2938–2953. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Gini, R.; Passoni, D.; Pinto, L.; Sona, G. Use of unmanned aerial systems for multispectral survey and tree classification: A test in a park area of northern Italy. Eur. J. Remote Sens. 2014, 47, 251–269. [Google Scholar] [CrossRef]
- Salo, H.; Tirronen, V.; Pölönen, I.; Tuominen, S.; Balazs, A.; Heikkilä, J.; Saari, H. Methods for estimating forest stem volumes by tree species using digital surface model and CIR images taken from light UAS. Proc. SPIE 2012, 8390. [Google Scholar] [CrossRef]
- Puliti, S.; Gobakken, T.; Ørka, H.O.; Næsset, E. Assessing 3D point clouds from aerial photographs for species-specific forest inventories. Scand. J. For. Res. 2017, 32, 68–79. [Google Scholar] [CrossRef]
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of within-season tree height growth in a mixed forest stand using UAV imagery. Forests 2017, 8, 231. [Google Scholar] [CrossRef]
- Melin, M.; Korhonen, L.; Kukkonen, M.; Packalen, P. Assessing the performance of aerial image point cloud and spectral metrics in predicting boreal forest canopy cover. ISPRS J. Photogramm. Remote Sens. 2017, 129, 77–85. [Google Scholar] [CrossRef]
- Kalacska, M.; Sanchez-Azofeifa, G.A.; Rivard, B.; Caelli, T.; White, H.P.; Calvo-Alvarado, J.C. Ecological fingerprinting of ecosystem succession: Estimating secondary tropical dry forest structure and diversity using imaging spectroscopy. Remote Sens. Environ. 2007, 108, 82–96. [Google Scholar] [CrossRef]
- Clark, M.L.; Roberts, D.A.; Ewel, J.J.; Clark, D.B. Estimation of tropical rain forest aboveground biomass with small-footprint lidar and hyperspectral sensors. Remote Sens. Environ. 2011, 115, 2931–2942. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; McCartney, G.; MacLean, D.A. Digital aerial photogrammetry for assessing cumulative spruce budworm defoliation and enhancing forest inventories at a landscape-level. ISPRS J. Photogramm. Remote Sens. 2018, 142, 1–11. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef]
- Nurminen, K.; Karjalainen, M.; Yu, X.; Hyyppä, J.; Honkavaara, E. Performance of dense digital surface models based on image matching in the estimation of plot-level forest variables. ISPRS J. Photogramm. Remote Sens. 2013, 83, 104–115. [Google Scholar] [CrossRef]
- Straub, C.; Stepper, C.; Seitz, R.; Waser, L.T. Potential of UltraCamX stereo images for estimating timber volume and basal area at the plot level in mixed European forests. Can. J. For. Res. 2013, 43, 731–741. [Google Scholar] [CrossRef]
- Dalponte, M.; Frizzera, L.; Gianelle, D. Fusion of hyperspectral and LiDAR data for forest attributes estimation. Int. Geosci. Remote Sens. Symp. 2014, 788–791. [Google Scholar] [CrossRef]
- Næsset, E. Effects of different flying altitudes on biophysical stand properties estimated from canopy height and density measured with a small-footprint airborne scanning laser. Remote Sens. Environ. 2004, 91, 243–255. [Google Scholar] [CrossRef]
- Alegria, C.; Tomé, M. A set of models for individual tree merchantable volume prediction for Pinus pinaster Aiton in central inland of Portugal. Eur. J. For. Res. 2011, 130, 871–879. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Tanré, D. Strategy for direct and indirect methods for correcting the aerosol effect on remote sensing: From AVHRR to EOS-MODIS. Remote Sens. Environ. 1996, 55, 65–79. [Google Scholar] [CrossRef]
- Ju, C.; Tian, Y.; Yao, X.; Cao, W.; Zhu, Y.; Hannaway, D. Estimating Leaf Chlorophyll Content Using Red Edge Parameters. Pedosphere 2010, 20, 633–644. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Verstraete, M.M.; Pinty, B. Designing optimal spectral indexes for remote sensing applications. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1254–1265. [Google Scholar] [CrossRef]
- Kandare, K.; Ørka, H.O.; Dalponte, M.; Næsset, E.; Gobakken, T. Individual tree crown approach for predicting site index in boreal forests using airborne laser scanning and hyperspectral data. Int. J. Appl. Earth Obs. Geoinf. 2017, 60, 72–82. [Google Scholar] [CrossRef]
- Gamon, J.A.; Surfus, J.S. Assessing leaf pigment content and activity with a reflectometer. New Phytol. 1999, 143, 105–117. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Yuan, J.G.; Niu, Z.; Fu, W.X. Model simulation for sensitivity of hyperspectral indices to LAI, leaf chlorophyll and internal structure parameter-art. no. 675213. Geoinfor. Remote Sensed Data Inf. 2007, 6752, 75213. [Google Scholar] [CrossRef]
- Darvishzadeh, R.; Atzberger, C.; Skidmore, A.K.; Abkar, A.A. Leaf Area Index derivation from hyperspectral vegetation indicesand the red edge position. Int. J. Remote Sens. 2009, 30, 6199–6218. [Google Scholar] [CrossRef]
- Peñuelas, J.; Gamon, J.A.; Griffin, K.L.; Field, C.B. Assessing community type, plant biomass, pigment composition, and photosynthetic efficiency of aquatic vegetation from spectral reflectance. Remote Sens. Environ. 1993, 46, 110–118. [Google Scholar] [CrossRef]
- Thomas, V.; Noland, T.; Treitz, P.; Mccaughey, J.H. Leaf area and clumping indices for a boreal mixed-wood forest: Lidar, hyperspectral, and Landsat models. Int. J. Remote Sens. 2011, 32, 8271–8297. [Google Scholar] [CrossRef]
- Fraser, R.H.; van der Sluijs, J.; Hall, R.J. Calibrating satellite-based indices of burn severity from UAV-derived metrics of a burned boreal forest in NWT, Canada. Remote Sens. 2017, 9, 279. [Google Scholar] [CrossRef]
- Mockel, T.; Dalmayne, J.; Prentice, H.C.; Eklundh, L.; Purschke, O.; Schmidtlein, S.; Hall, K. Classification of grassland successional stages using airborne hyperspectral imagery. Remote Sens. 2014, 6, 7732–7761. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Vescovo, L.; Gianelle, D. The role of spectral resolution and classifier complexity in the analysis of hyperspectral images of forest areas. Remote Sens. Environ. 2009, 113, 2345–2355. [Google Scholar] [CrossRef]
- Elith, J.; Lautenbach, S.; McClean, C.; Bacher, S.; Dormann, C.F.; Skidmore, A.K.; Buchmann, C.; Schröder, B.; Reineking, B.; Osborne, P.E.; et al. Collinearity: A review of methods to deal with it and a simulation study evaluating their performance. Ecography 2012, 36, 27–46. [Google Scholar] [CrossRef]
- Vaglio Laurin, G.; Chen, Q.; Lindsell, J.A.; Coomes, D.A.; Del Frate, F.; Guerriero, L.; Pirotti, F.; Valentini, R. Above ground biomass estimation in an African tropical forest with lidar and hyperspectral data. ISPRS J. Photogramm. Remote Sens. 2014, 89, 49–58. [Google Scholar] [CrossRef]
- Palermo, G.; Piraino, P.; Zucht, H.-D. Advances and Applications in Bioinformatics and Chemistry Performance of PLS regression coefficients in selecting variables for each response of a multivariate PLs for omics-type data. Adv. Appl. Bioinf. Chem. 2009, 2, 57–70. [Google Scholar] [CrossRef]
- Geladi, P.; Kowalski, B.R. Partial least-squares regression: A tutorial. Anal. Chim. Acta 1986, 185, 1–17. [Google Scholar] [CrossRef]
- Chong, I.G.; Jun, C.H. Performance of some variable selection methods when multicollinearity is present. Chemom. Intell. Lab. Syst. 2005, 78, 103–112. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Ota, T.; Ogawa, M.; Mizoue, N.; Fukumoto, K.; Yoshida, S. Forest Structure Estimation from a UAV-Based Photogrammetric Point Cloud in Managed Temperate Coniferous Forests. Forests 2017, 8, 343. [Google Scholar] [CrossRef]
- Goldbergs, G.; Maier, S.W.; Levick, S.R.; Edwards, A. Efficiency of individual tree detection approaches based on light-weight and low-cost UAS imagery in Australian Savannas. Remote Sens. 2018, 10, 161. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Vastaranta, M.; Coops, N.C.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef]
- Perroy, R.L.; Sullivan, T.; Stephenson, N. Assessing the impacts of canopy openness and flight parameters on detecting a sub-canopy tropical invasive plant using a small unmanned aerial system. ISPRS J. Photogramm. Remote Sens. 2017, 125, 174–183. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.J.; Faias, S.P.; Tomé, M.; Díaz-Varela, R.A. Use of multi-temporal UAV-derived imagery for estimating individual tree growth in Pinus pinea stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Enclona, E.A.; Ashton, M.S.; Legg, C.; De Dieu, M.J. Hyperion, IKONOS, ALI, and ETM+ sensors in the study of African rainforests. Remote Sens. Environ. 2004, 90, 23–43. [Google Scholar] [CrossRef]
- Yamauchi, S.; Higashitani, N.; Otani, M.; Higashitani, A.; Ogura, T.; Yamanaka, K. Involvement of HMG-12 and CAR-1 in the cdc-48.1 expression of Caenorhabditis elegans. Dev. Biol. 2008, 318, 348–359. [Google Scholar] [CrossRef]
- Peñuelas, J.; Filella, I. Reflectance assessment of mite effects on apple trees. Int. J. Remote Sens. 1995, 16, 2727–2733. [Google Scholar] [CrossRef]
- Charette, L. L’idéologie dans l’éducation. Philosophiques 2012, 3, 289. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Enclona, E.A.; Ashton, M.S.; Van Der Meer, B. Accuracy assessments of hyperspectral waveband performance for vegetation analysis applications. Remote Sens. Environ. 2004, 91, 354–376. [Google Scholar] [CrossRef]
- Chan, J.C.W.; Paelinckx, D. Evaluation of Random Forest and Adaboost tree-based ensemble classification and spectral band selection for ecotope mapping using airborne hyperspectral imagery. Remote Sens. Environ. 2008, 112, 2999–3011. [Google Scholar] [CrossRef]
- Blackburn, G.A. Quantifying chlorophylls and carotenoids at leaf and canopy scales: An evaluation of some hyperspectral approaches. Remote Sens. Environ. 1998, 66, 273–285. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; Crawford, P. Assessing the status of forest regeneration using digital aerial photogrammetry and unmanned aerial systems. Int. J. Remote Sens. 2017, 39, 5246. [Google Scholar] [CrossRef]
- Thomas, V.; Treitz, P.; McCaughey, J.H.; Morrison, I. Mapping stand-level forest biophysical variables for a mixedwood boreal forest using lidar: An examination of scanning density. Can. J. For. Res. 2006, 36, 34–47. [Google Scholar] [CrossRef]
- Stepper, C.; Straub, C.; Pretzsch, H. Assessing height changes in a highly structured forest using regularly acquired aerial image data. Forestry 2014, 88, 304–316. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest Parameters | G1 (n = 17) | G2 (n = 17) | G3 (n = 11) | |||
|---|---|---|---|---|---|---|
| Range | Mean ± SD | Range | Mean ± SD | Range | Mean ± SD | |
| DBH | 10.61–23.39 | 19.96 ± 3.13 | 10.15–20.82 | 17.72 ± 2.68 | 10.49–17.74 | 14.74 ± 2.74 |
| HL | 6.69–14.53 | 12.01 ± 1.85 | 6.93–14.60 | 11.23 ± 1.93 | 6.64–12.64 | 10.32 ± 2.15 |
| N | 311–495 | 430 ± 57 | 509–608 | 561 ± 36 | 679–1329 | 866 ± 209 |
| G | 13.89–57.51 | 44.01 ± 10.89 | 15.22–64.47 | 46.23 ± 12.90 | 20.29–74.82 | 48.58 ± 15.92 |
| V | 16.55–105.26 | 74.97 ± 21.95 | 18.50–120.86 | 76.16 ± 26.42 | 24.08–128.81 | 76.61 ± 31.61 |
| MicaSense RedEdge | Sony A7R | |
|---|---|---|
| Flight height (m) | 150 | 350 |
| Flight speed (m/s) | 30 | 20 |
| Forward overlap (%) | 80 | 75 |
| Lateral overlap (%) | 80 | 65 |
| Spectral bands | Blue, Green, Red, Red-edge and Near-infrared | Blue, Green and Red |
| Optimal resolution | 1280 × 960 | 7360 × 4912 |
| ground sample distance (cm) | 10 | 5 |
| Image format | 16-bit TIFF (Tagged Image File Format) | 24-bit TIFF |
| Metrics | Description |
|---|---|
| Percentile heights (H25, H50, H75, and H95) | The percentiles of the canopy height distributions (25th, 50th, 75th, and 95th) |
| Canopy return density (D1, D3, D5, D7, and D9) | The proportion of points above the quantiles (10th, 30th, 50th, 70th, and 90th) to total number of points |
| Mean/Maximum height (Hmean/Hmax) | Mean/maximum height above ground of all points |
| Coefficient of variation of heights (Hcv) | Coefficient of variation of heights of all points |
| Open and Closed gap zones of Canopy volume models (CVM) (i.e., Open and Closed) | The empty voxels located above and below the canopy |
| Euphotic and Oligophotic zones of CVM (i.e., E and O) | The voxels located within an uppermost percentile (65%) of all filled grid cells of that column, and voxels located below the point in the profile |
| α and β parameter of Weibull distribution (i.e., Wα and Wβ) | The α and β parameter of the Weibull distribution fitted to foliage density profile |
| Vegetation Index | Equation | Reference |
|---|---|---|
| Atmospherically Resistant Vegetation Index (ARVI) | (ρnir − ρrb)/(ρnir + ρrb), ρrb = ρred − γ (ρblue − ρred), γ=0.5 | [47] |
| Difference Vegetation Index (DVI) | ρnir − ρred | [48] |
| Enhanced Vegetation Index (EVI) | 2.5(ρnir − ρred)/(ρnir + 6ρred − 7.5ρblue +1) | [49] |
| Global Environment Monitoring Index (GEMI) | n(1 − 0.25n)(ρred − 0.125)/(1 − ρred), n = [2(ρnir2 − ρred2) + 1.5ρnir + 0.5ρred]/(ρnir + ρred + 0.5) | [50] |
| Green Normalized Difference Vegetation Index (GNDVI) | (ρnir − ρgreen)/(ρnir + ρgreen) | [50] |
| Infrared Percentage Vegetation Index (IPVI) | ρnir/(ρnir + ρred) | [51] |
| Red Green Ratio Index (RGRI) | ρred − ρgreen | [52] |
| Modified Soil Adjusted Vegetation Index (MSAVI) | [2ρnir + 1 − [(2ρnir + 1)2 − 8(ρnir − ρred)]0.5]/2 | [53] |
| Modified Simple Ratio Vegetation Index (MSR) | ρred/(ρnir/ρred + 1)0.5 | [53] |
| Modified Triangular Vegetation Index (MTVI) | [1.5(1.2(ρnir − ρgreen) − 2.5(ρred − ρgreen)]/[(2ρnir + 1)2 − (6ρnir − 5ρred0.5) − 0.5]0.5 | [53] |
| Normalized Difference Vegetation Index (NDVI) | (ρnir − ρred)/(ρnir + ρred) | [53] |
| Optimized Soil Adjusted Vegetation Index (OSAVI) | (ρnir − ρred)/(ρnir + ρred + 0.16) | [54] |
| Renormalized Difference Vegetation Index (RDVI) | (ρnir − ρred)/(ρnir + ρred) 0.5 | [53] |
| Ratio Vegetation Index (RVI) | ρred/ρnir | [55] |
| Soil and Atmospherically Resistant Vegetation Index (SARVI) | (1 + 0.5)(ρnir − ρrb)/(ρnir + ρrb + 0.5), ρrb = ρred − γ(ρblue -ρred), γ = 0.5 | [53] |
| Soil Adjusted Vegetation Index (SAVI) | (1 + 0.5)(ρnir − ρred)/(ρnir + ρred + 0.5) | [53] |
| Simple Ration Vegetation Index (SR) | ρnir/ρred | [56] |
| Simple Ratio × Normalized Difference Vegetation Index (SR × NDVI) | (ρnir2 − ρred)/(ρnir + ρred2) | [57] |
| G/R (GR) | ρgreen/ρred | [58] |
| Brightness (BI) | ρgreen + ρred + ρblue | [58] |
| Normalized Greenness (Norm G) | ρgreen/(ρgreen + ρred + ρblue) | [58] |
| Normalized Green-Red Ratio (Norm GR) | (ρgreen − ρred)/(ρgreen + ρred) | [58] |
| Models | Number of Components | Total Explained Variability (%) | R2 | RMSE | rRMSE (%) |
|---|---|---|---|---|---|
| Spectral metrics | |||||
| HLa | 3 | 99.33 | 0.69 | 1.23 | 10.88 |
| HLb | 3 | 98.30 | 0.71 | 1.20 | 9.99 |
| HLc | 2 | 97.84 | 0.73 | 1.12 | 9.97 |
| HLd | 3 | 99.78 | 0.73 | 1.03 | 9.99 |
| Va | 2 | 95.99 | 0.62 | 14.14 | 18.65 |
| Vb | 2 | 96.09 | 0.64 | 13.95 | 18.61 |
| Vc | 3 | 98.08 | 0.70 | 13.50 | 17.73 |
| Vd | 2 | 98.50 | 0.69 | 13.62 | 17.78 |
| Combined spectral and structural metrics | |||||
| HLa | 3 | 96.20 | 0.92 | 0.55 | 4.86 |
| HLb | 3 | 96.11 | 0.93 | 0.53 | 4.41 |
| HLc | 3 | 96.34 | 0.93 | 0.49 | 4.36 |
| HLd | 2 | 98.11 | 0.94 | 0.44 | 4.26 |
| Va | 2 | 94.43 | 0.82 | 11.06 | 14.59 |
| Vb | 3 | 97.85 | 0.84 | 10.74 | 14.33 |
| Vc | 3 | 96.75 | 0.85 | 10.72 | 14.08 |
| Vd | 3 | 97.95 | 0.87 | 10.16 | 13.26 |
| Models | Number of Components | Total Explained Variability (%) | R2 | RMSE | rRMSE (%) |
|---|---|---|---|---|---|
| Spectral metrics | |||||
| HLa | 3 | 99.71 | 0.58 | 1.63 | 14.41 |
| HLb | 3 | 99.83 | 0.59 | 1.60 | 13.32 |
| HLc | 4 | 99.82 | 0.63 | 1.49 | 13.27 |
| HLd | 3 | 99.90 | 0.64 | 1.36 | 13.18 |
| Va | 4 | 99.84 | 0.56 | 16.62 | 21.92 |
| Vb | 3 | 99.85 | 0.60 | 15.99 | 21.33 |
| Vc | 3 | 94.40 | 0.61 | 15.87 | 20.84 |
| Vd | 2 | 92.73 | 0.60 | 16.17 | 21.10 |
| Combined spectral and structural metrics | |||||
| HLa | 3 | 93.56 | 0.93 | 0.52 | 4.60 |
| HLb | 3 | 94.02 | 0.94 | 0.50 | 4.16 |
| HLc | 2 | 97.03 | 0.94 | 0.46 | 4.10 |
| HLd | 2 | 95.35 | 0.96 | 0.42 | 4.07 |
| Va | 4 | 93.18 | 0.82 | 10.74 | 14.17 |
| Vb | 3 | 93.33 | 0.84 | 10.61 | 14.15 |
| Vc | 2 | 92.91 | 0.85 | 10.52 | 13.81 |
| Vd | 3 | 94.47 | 0.88 | 9.82 | 12.82 |
| Models | Number of Components | Total Explained Variability (%) | R2 | RMSE | rRMSE (%) |
|---|---|---|---|---|---|
| HLa | 2 | 97.72 | 0.94 | 0.48 | 4.24 |
| HLb | 2 | 95.53 | 0.94 | 0.45 | 3.75 |
| HLc | 2 | 94.46 | 0.96 | 0.34 | 3.03 |
| HLd | 2 | 97.95 | 0.97 | 0.30 | 2.91 |
| Va | 2 | 92.10 | 0.83 | 10.43 | 13.76 |
| Vb | 3 | 94.27 | 0.87 | 9.82 | 13.10 |
| Vc | 2 | 95.00 | 0.89 | 8.87 | 11.65 |
| Vd | 3 | 95.34 | 0.90 | 8.18 | 10.68 |
| Platforms | Sensors | Study Area | Forest Types | Estimated Forest Attributes | Accuracy of Models (rRMSE %) | References |
|---|---|---|---|---|---|---|
| Mx-Sight | Panasonic Lumix DMC-GF1 | Alcolea, Spain | Subtropical forest | Mean height | 11.5 | [67] |
| DJI S800 | Sony NEX-5R | South and southeast of Prague, Czech Republic | Temperate forest | Mean height, Crown diameter | 11.42–12.62 and 14.29–18.56 | [21] |
| SenseFly eBee | Canon S110 NIR | Våler municipality, Norway | Boreal forest | HL, Dominate height, N, G, V | 13.3, 3.5, 39.2, 15.4, and 14.5 | [40] |
| DJI Phantom 4 | 1/2.3 CMOS | Oita, Japan | Temperate forest | HL, Mean height, Maximum height, V | 6.65, 7.50, 6.17, and 20.02 | [68] |
| - | Voxel UltraCamX | northern Vancouver Island, Canada | temperate rainforest | HL, G, V | 14.00, 37.68, and 36.87 | [29] |
| Gatewing X100 | Ricoh GR3 | village of Felenne, Belgium | Temperate forest | Dominate height | 8.40 | [66] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, X.; Cao, L.; Yang, B.; Xu, Z.; Wang, G. Estimation of Forest Structural Attributes Using Spectral Indices and Point Clouds from UAS-Based Multispectral and RGB Imageries. Remote Sens. 2019, 11, 800. https://doi.org/10.3390/rs11070800
Shen X, Cao L, Yang B, Xu Z, Wang G. Estimation of Forest Structural Attributes Using Spectral Indices and Point Clouds from UAS-Based Multispectral and RGB Imageries. Remote Sensing. 2019; 11(7):800. https://doi.org/10.3390/rs11070800
Chicago/Turabian StyleShen, Xin, Lin Cao, Bisheng Yang, Zhong Xu, and Guibin Wang. 2019. "Estimation of Forest Structural Attributes Using Spectral Indices and Point Clouds from UAS-Based Multispectral and RGB Imageries" Remote Sensing 11, no. 7: 800. https://doi.org/10.3390/rs11070800
APA StyleShen, X., Cao, L., Yang, B., Xu, Z., & Wang, G. (2019). Estimation of Forest Structural Attributes Using Spectral Indices and Point Clouds from UAS-Based Multispectral and RGB Imageries. Remote Sensing, 11(7), 800. https://doi.org/10.3390/rs11070800