1. Introduction
Satellite based fire detection products trace their roots back to the National Oceanic and Atmospheric Administration (NOAA) Advanced Very High Resolution Radiometer (AVHRR), first launched in 1978. One of the phenomena observed in early AVHRR data were sub-pixel infrared emitters, such as biomass burning. In 1981, two papers were published [
1,
2] reporting on a multispectral method to extract temperature and source size for sub-pixel IR emitters with mid-wave infrared (MWIR) and long-wave infrared (LWIR) data. Referred to as the “Dozier method”, this only works for pixels with IR emitter detection in both spectral ranges. This vastly reduced the number of pixels for which the Dozier method could be successfully applied. Following that burst of innovation, satellite fire remote sensing settled in to MWIR hotspot detection. The second generation algorithms operated by comparing the brightness temperatures (BT) in the mid-wave infrared (~4 μm) with the long-wave infrared (11 μm) [
3,
4,
5,
6]. If the MWIR BT exceeded the LWIR by a certain amount, the pixel was marked as a hot spot. The basis for the MWIR algorithms comes from Planck’s Law, which states that hot objects have their peak radiant emissions at shorter wavelengths than cooler objects. It should be noted that the BTs calculated for fire pixels do not represent true temperature of subpixel IR emitters, such as fires. This is because the single band BT is only a valid representation where the object fills the pixel entirely [
1,
7]. With detection in a single spectral band, it is not possible to apply Planck’s Law to derive temperature, source area and radiant output using physical laws. In place, for the MWIR fire product output, an empirical “Fire Radiative Power” (FRP) function was developed empirically [
8,
9,
10] using radiative output measurements from known quantities of burning biomass. One of the shortcomings of FRP is that it is only valid over a narrow range of temperatures. The standard FRP is calibrated for range of 700 to 1300 K, the temperature range of flaming phase biomass burning. The contextual AVHRR fire detection algorithm was the heritage for both the operational MODIS (Moderate Resolution Imaging Spectrometer) and VIIRS (Visible Infrared Imaging Radiometer Suite) fire product algorithms [
10,
11]. More recently, a higher spatial resolution VIIRS MWIR fire product based on the VIIRS imaging bands has been introduced [
12,
13].
There are currently two VIIRS instruments collecting daily global data. The original VIIRS instrument was launched in 2011 on the NASA/NOAA Suomi National Polar Partnership (SNPP) satellite. The second VIIRS was launched in 2017 on the Joint Polar Satellite System (JPSS) NOAA-20 satellite. There are three additional VIIRS instruments planned, to be launched on nominal five year increments.
The VIIRS is unusual in that it continues to collect data in two near infrared (NIR) and shortwave infrared (SWIR) channels at night. Originally, the SNPP VIIRS only collected one SWIR band at night, the M10 band at 1.6 μm. The authors requested data collection from the second SWIR band, M11 at 2.2 μm, and these began in January 2018. The J1 VIIRS has collected nighttime data from both SWIR bands from the start of collections. The NIR and SWIR VIIRS bands are designed as daytime imaging channels. In the absence of sunlight the images primarily record the sensor background noise, which is punctuated by small clusters of IR emitters, including biomass burning and gas flaring. This is a style of low light imaging in that the IR emitters are only obvious in the absence of sunlight. Similar spectral channels are found on many multispectral earth observing sensors, but the data collection is typically discontinued at night. This VIIRS capability led to the development of VIIRS Nightfire (VNF) [
14], a multispectral IR emitter algorithm that uses Planck curve fitting and physical laws to derive temperature (K), source area (m
2), and radiant heat (watts/m
2). Using this multispectral approach it has been possible to solve for these terms for sources ranging from 600 to 6000 K using a combination of Planck’s Law, Wein’s Displacement Law, and the Stefan–Boltzmann’s Law. The nightfire algorithm was recently adapted for gas flare monitoring with data from Sea and Land Surface Temperature Radiometer (SLSTR) instrument aboard European Space Agency’s (ESA’s) Sentinel-3 satellite [
15].
At night, VIIRS also collects low-light imaging data in a broad visible and NIR day/night band (DNB) [
16]. One of the high demand VIIRS products is called nighttime lights, depicting the location and brightness of electric lighting. The forerunner for VIIRS nighttime lights are the Defense Meteorological Satellite Program (DMSP) nighttime lights, which extend from 1992 to 2013. One of the critical steps in producing nighttime lights is the removal of detections from biomass burning. In developing the VIIRS nighttime lights algorithm suite, our original plan was to use VIIRS nightfire data to filter out pixels contaminated by radiant emissions from IR emitters. What we discovered is that there are large numbers of VIIRS DNB biomass burning detections that are not detected by VIIRS nightfire [
17]. In this paper, we examine the combustion source detection limits of the nighttime VIIRS bands (M7, 8, 10, 11, 12, 13, and DNB) both in terms of radiance and also temperature versus source area. In addition, we examine sources of error and how they are addressed in VNF.
2. VNF Methods
VNF runs detection algorithms on six spectral bands (M7, 8, 10, 11, 12, and 13). Detections in M10, M11, and M12&13 result in VNF records. That is to say, detections that occur in M7 and M8 that are not confirmed with SWIR or MWIR are dropped and not recorded. The DNB is not currently used in the VNF algorithm, though the DNB radiances of VNF local maximas are recorded in the VNF output. The DNB pixel selected as a VNF match is the one that contains the latitude/longitude from the VNF pixel center.
For the short wavelength M bands (7, 8, 10, and 11) the detection algorithm identifies pixels that exceed the mean plus four standard deviations. This algorithm is run on the four NIR and SWIR spectral bands separately. Essentially, the algorithm detects pixels with radiances that clearly exceed the sensor noise floor. One of the advantages of using the daytime channels at night is that the full detected radiance can be attributed to the IR emitter.
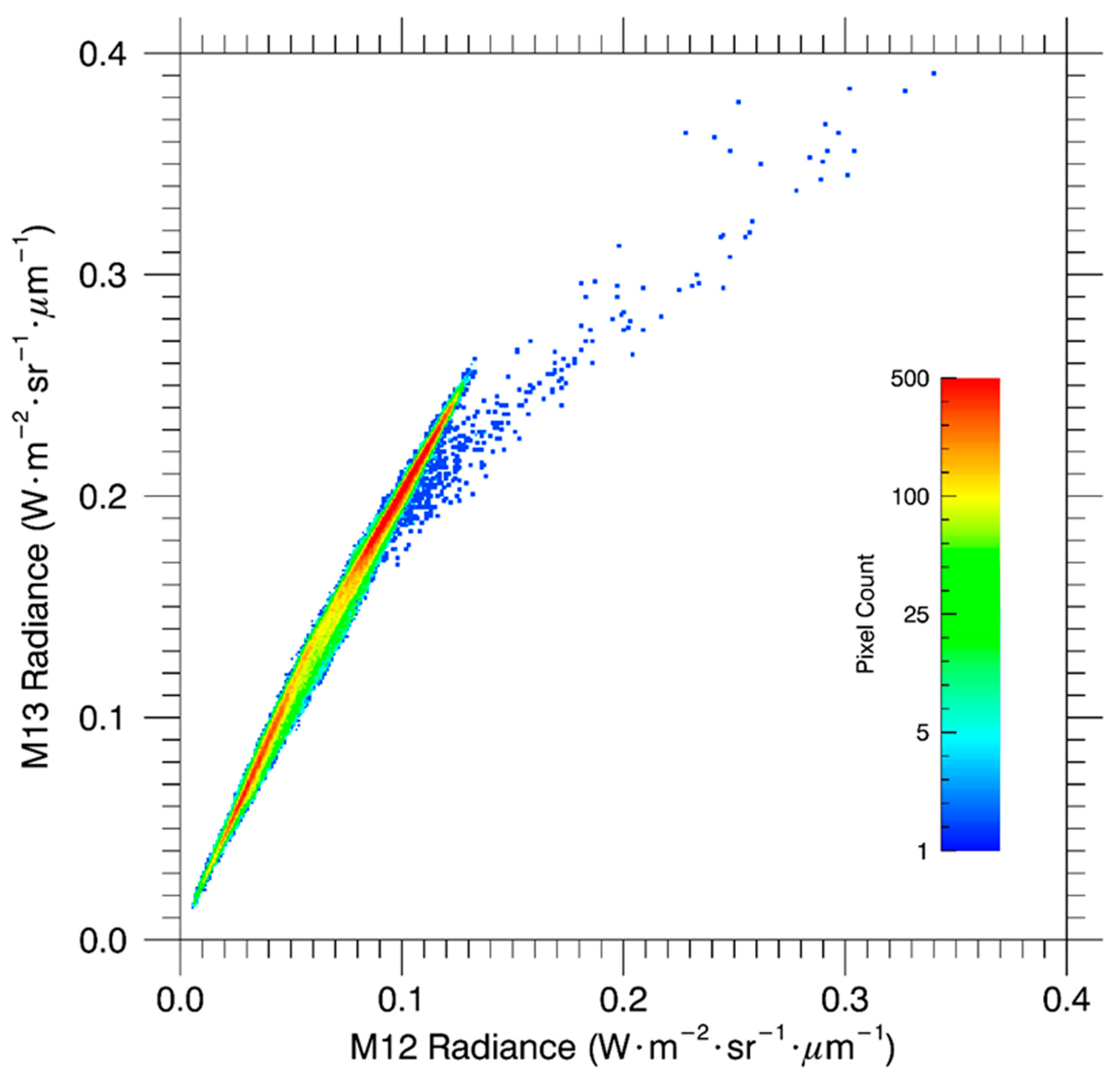
A second style of detection algorithm is run for the MWIR (bands M12 and M13), where the signal contains radiant emissions from the background and any IR emitter present in the pixel footprint. Because the MWIR channels are so close to each other in wavelength, the band specific emissivities of most background components (earth surface and clouds) are highly correlated. On top of this, the background temperatures fall in a narrow range with low values as compared to many combustion sources. The algorithm generates scattergrams of M12 and M13 radiances, which invariably contains a dense diagonal cluster of pixels corresponding to temperature variations of the background (
Figure 1). Pixels containing IR emitters fall outside that diagonal data cloud. The MWIR detection algorithm operates on the scattergram images, identifying the dense diagonal, encasing the diagonal using a convex hull [
18] and recording the outlier pixels as having IR emitters.
There are substantial numbers of low intensity detections surrounding both fire and flares arising from atmospheric scatter (glow). This is especially obvious in the daytime NIR and SWIR data collected at night. A top hat filter [
19] is used to trim off glow surrounding pixels containing real IR emitters. Outside of the SNPP DNB, all the VIIRS bands have ground footprint overlap between adjacent lines, particularly pronounced in the outer third of the swaths. This is known as the bow-tie effect. VNF filters the detection duplicates associated with the bow-tie effect by requiring detections from adjacent scans be at least half a pixel apart.
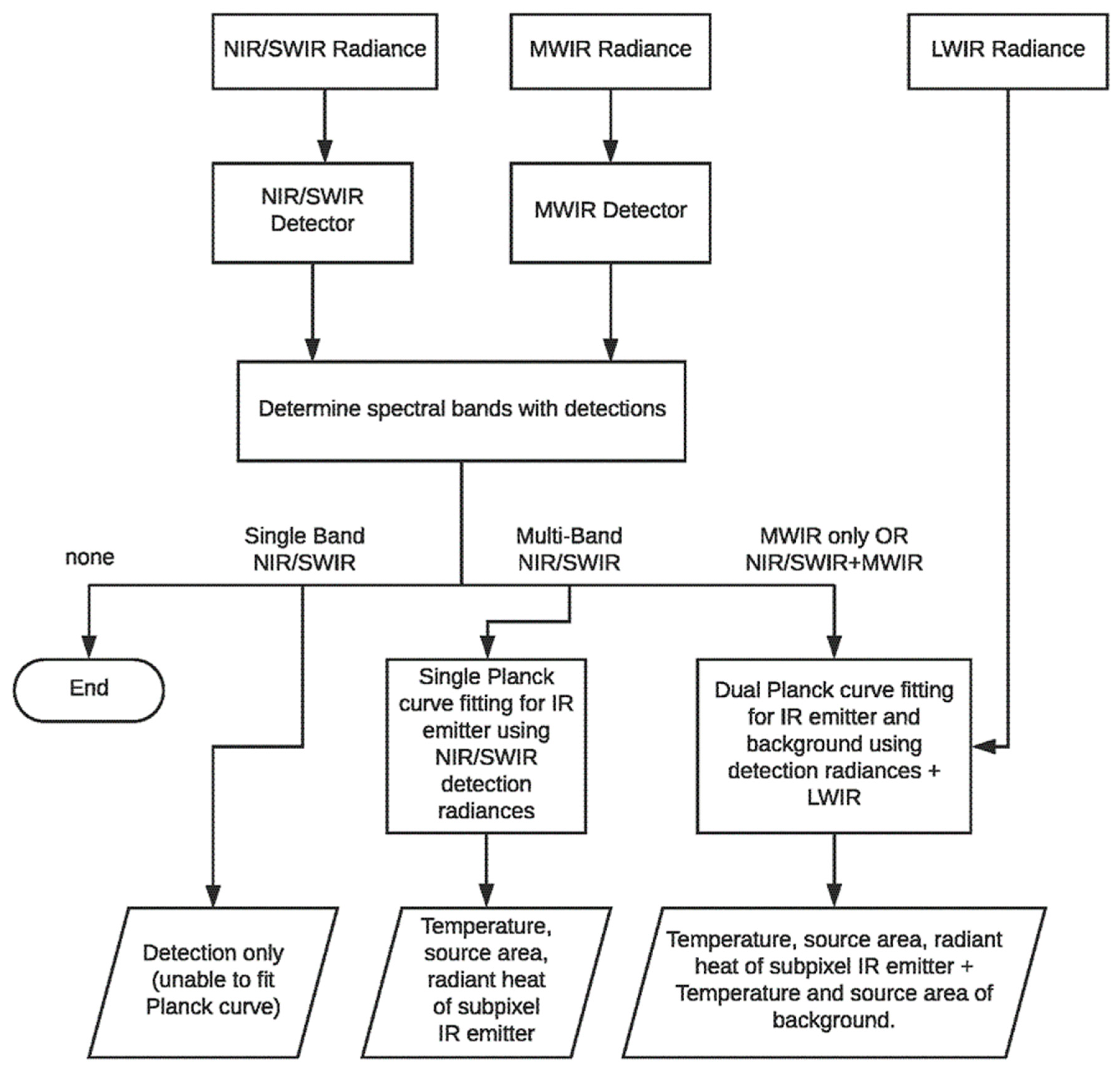
VNF includes two styles of Planck curve fitting, as shown in flowchart
Figure 2. In both cases, there is an assumption that the IR emitter can be characterized by a single temperature. This constraint traces its roots back to the original Dozier subpixel IR emitter algorithm. While this is not strictly true, it simplifies the analysis to a tractable level. The first style of Planck curve fitting simply uses the radiance in the daytime channels in pixels that lack MWIR detection. The second case is where there is detection in the MWIR. This can be with or without detection in the daytime channels. Here, simultaneous dual Planck curve fitting is employed to separate the background versus subpixel IR emitter radiance in the two MWIR channels. The short wavelength radiances are used as-is in the IR emitter Planck curve fitting. The LWIR radiances are used as an initial representation of the background. A simplex fitting algorithm [
20] adjust the temperature and source size to get a best fit to the observed radiances. The goodness of fit metric is the sum of the squared residuals (SSR).
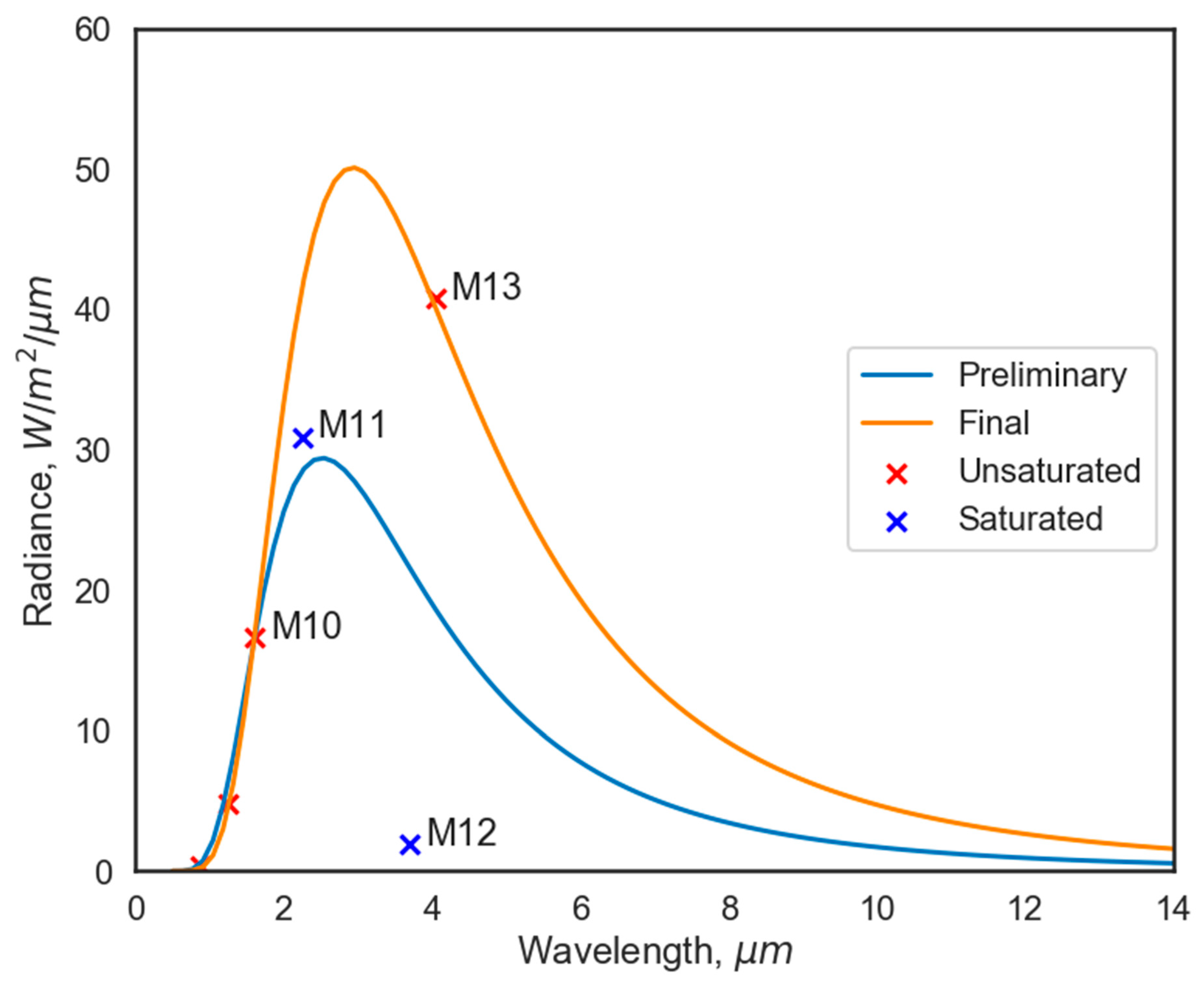
The original VNF algorithm [
13] identified subpixel saturation in the M12 spectral band based on unexpectedly low M12 radiances relative to the M13 radiance. VNF has been modified to test each pixel for the presence of saturation or other radiance irregularity using the SSR. Pixels exceeding the SSR threshold are analyzed in more detail to determine which spectral bands have anomalous radiances. Then the Planck curve fitting is run again excluding the irregular radiances.
3. Data Sources
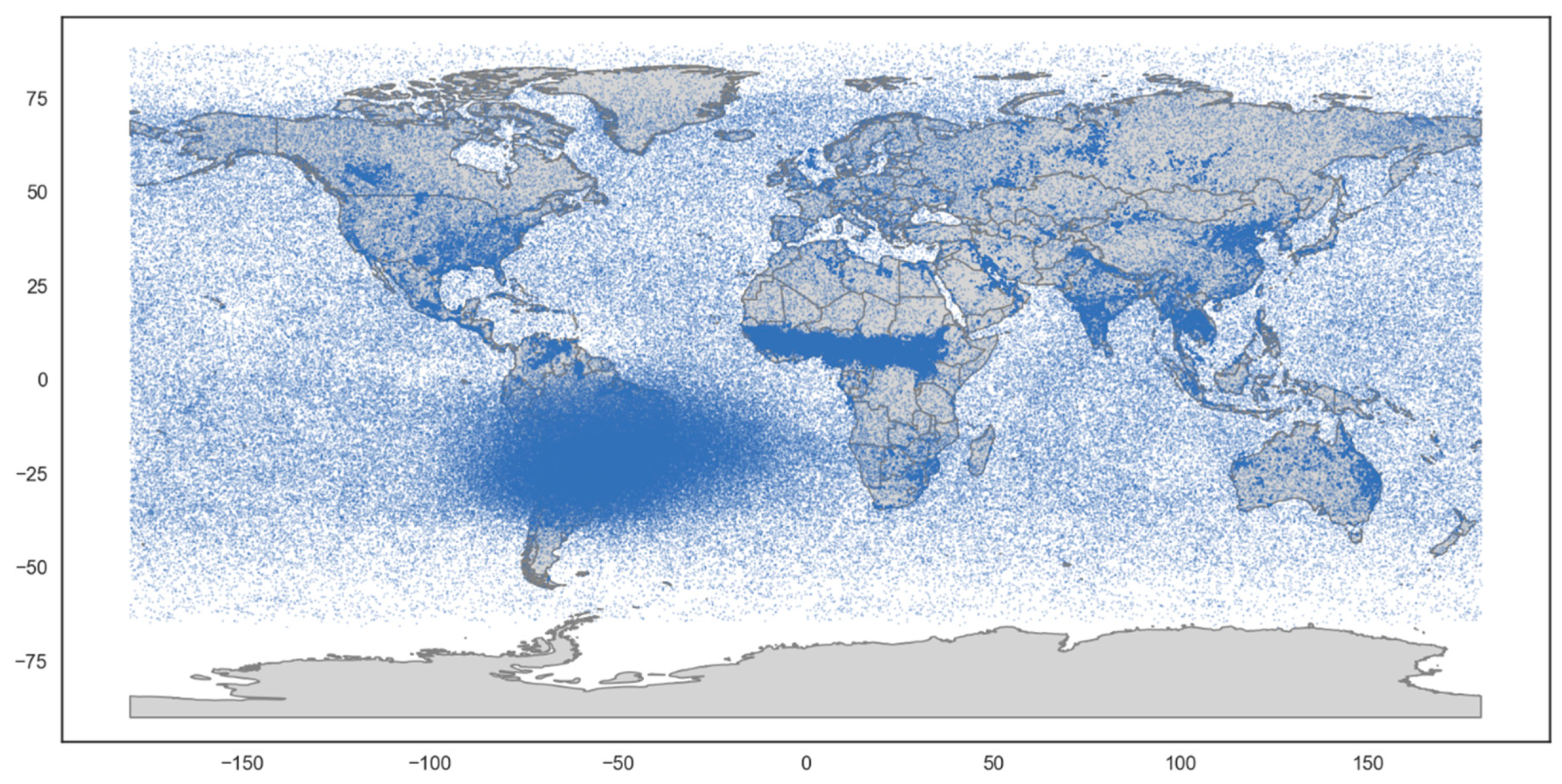
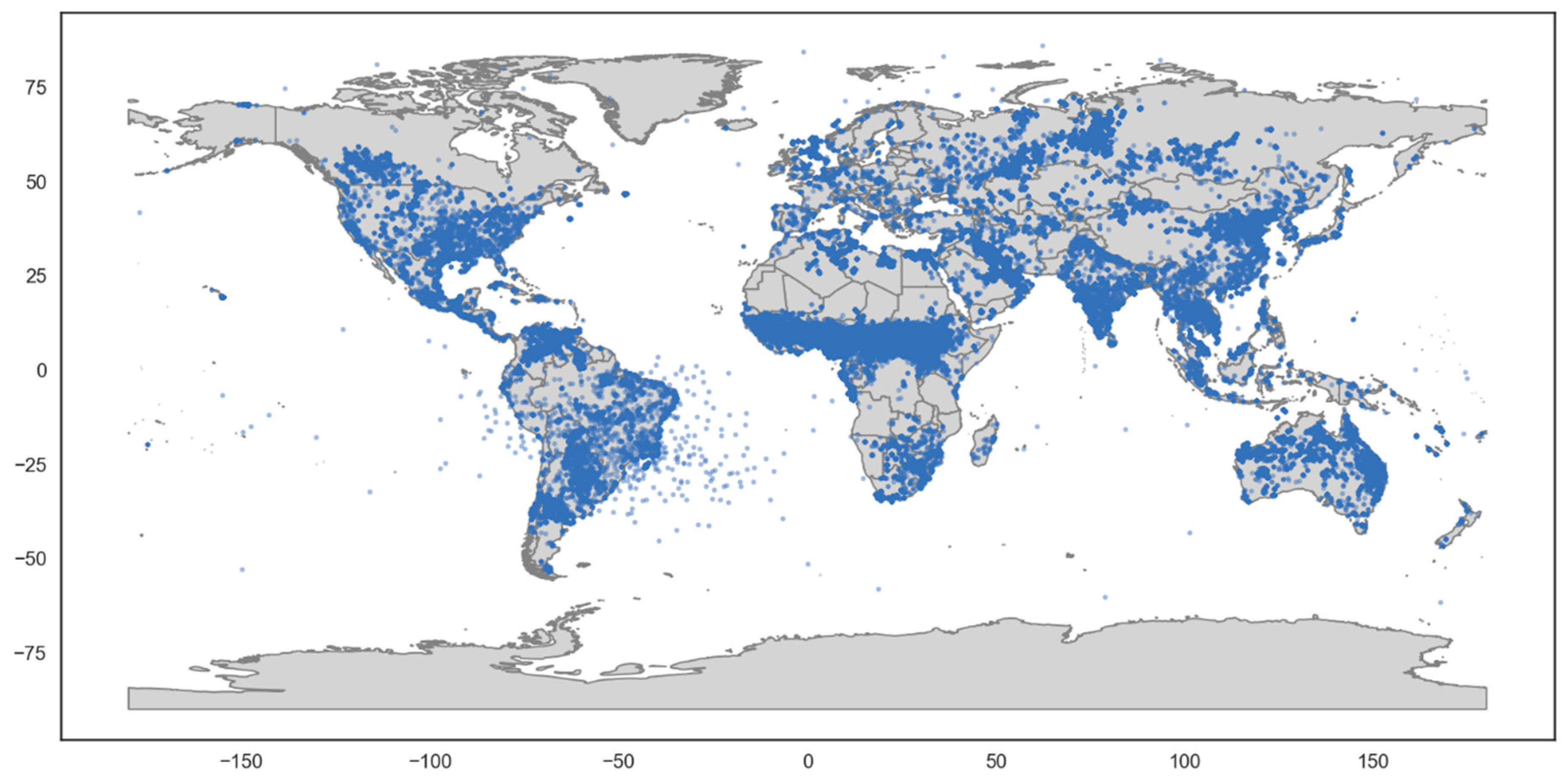
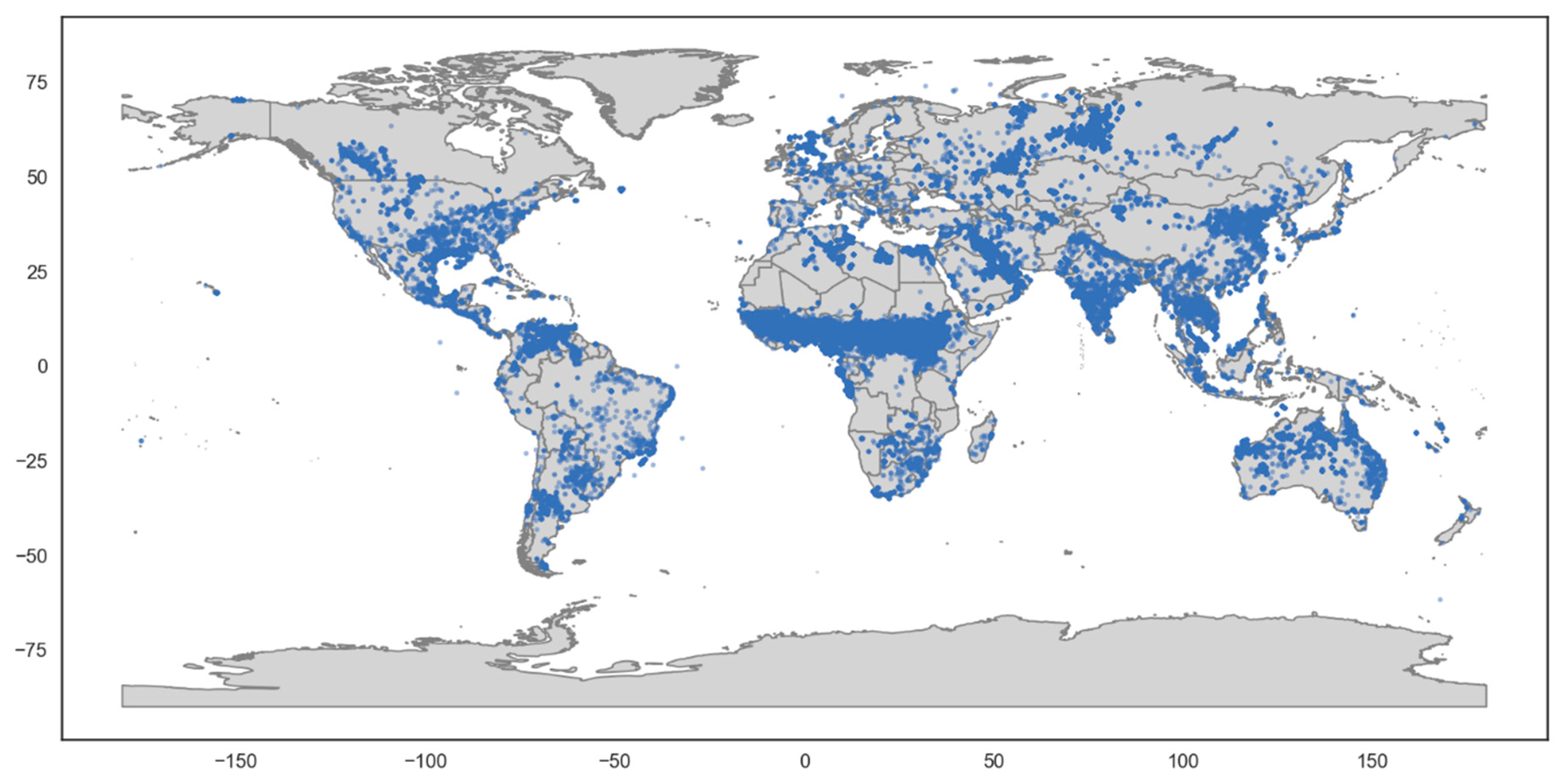
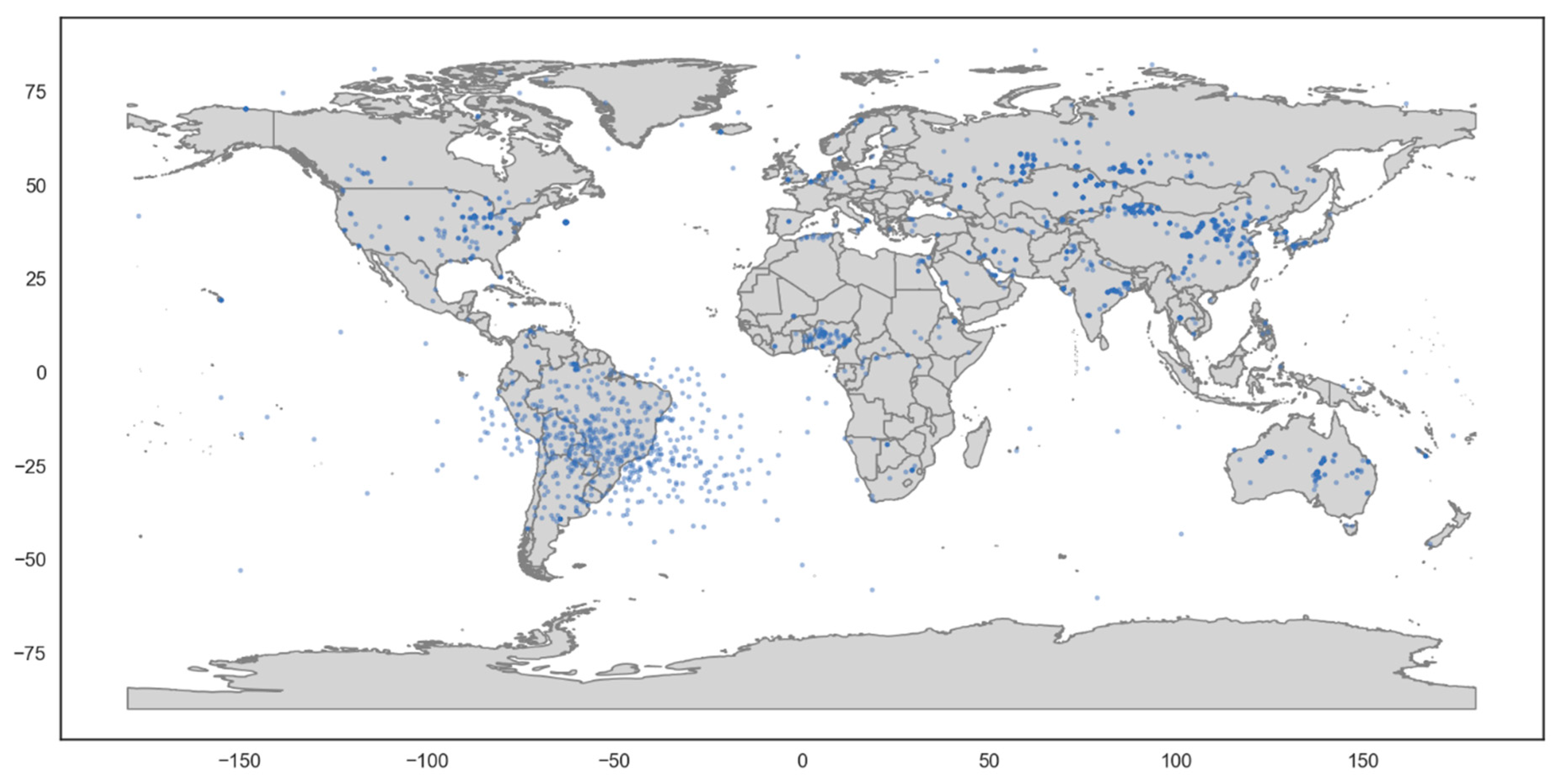
Global Suomi National Polar Partnership (SNPP) VIIRS nightfire data from January 2018 were extracted from the VNF database. This month was selected because it was the first month with the M11 spectral band collected at night by the SNPP VIIRS. The fields extracted indicate the spectral bands with detections, the radiances in the moderate resolution bands that collect at night (M7, 8, 10, 11, 12, 13, 14, 15, and 16), the day/night band (DNB) radiances, and the temperatures and source areas calculated using the M band radiances. For M12 and M13 the background radiance has been subtracted using the dual Planck curve fitting described in
Section 2. The detection pixel tally for each of the M bands is listed in
Table 1. The total number of VNF pixels included in the analysis is 456,954.
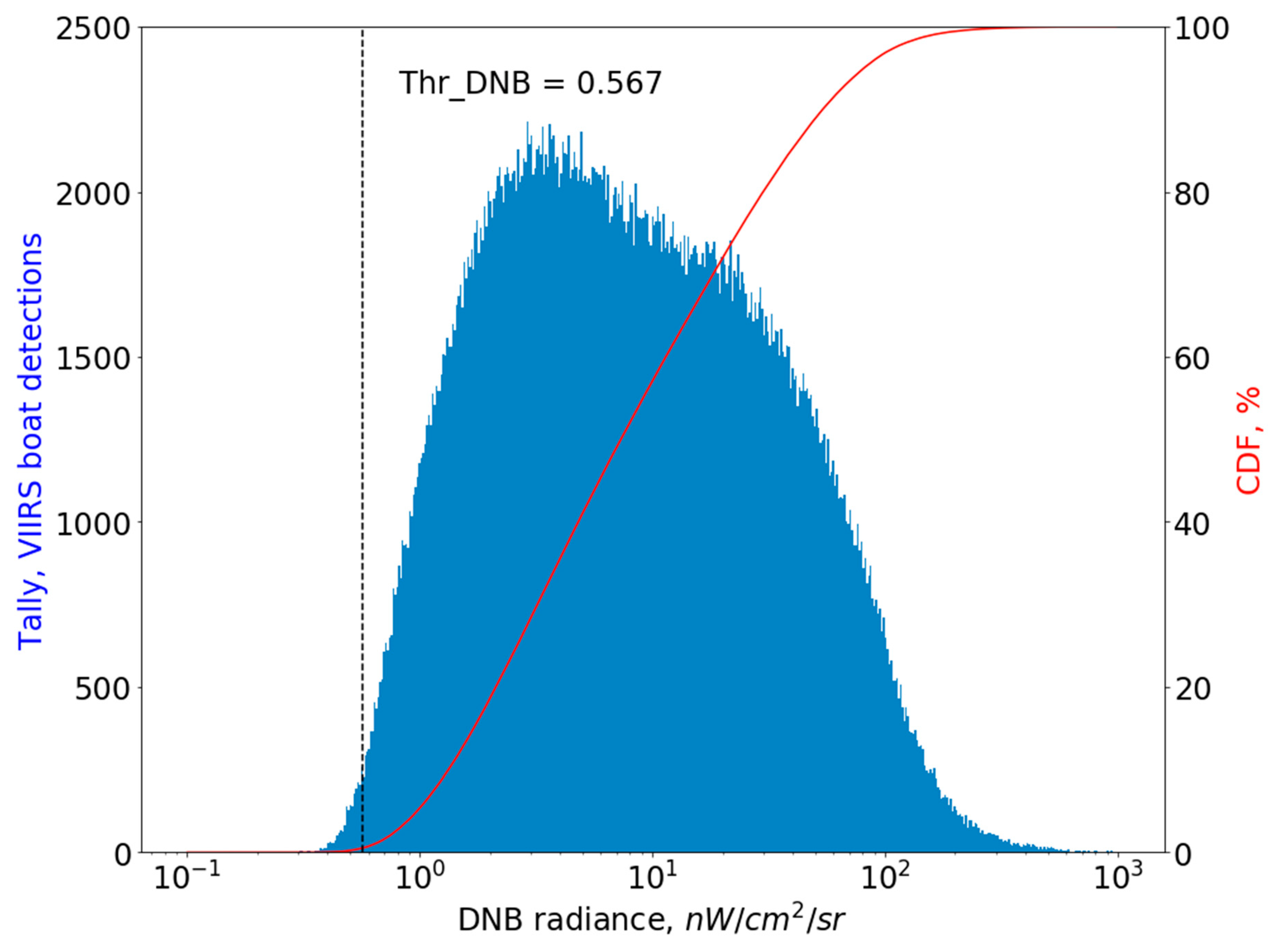
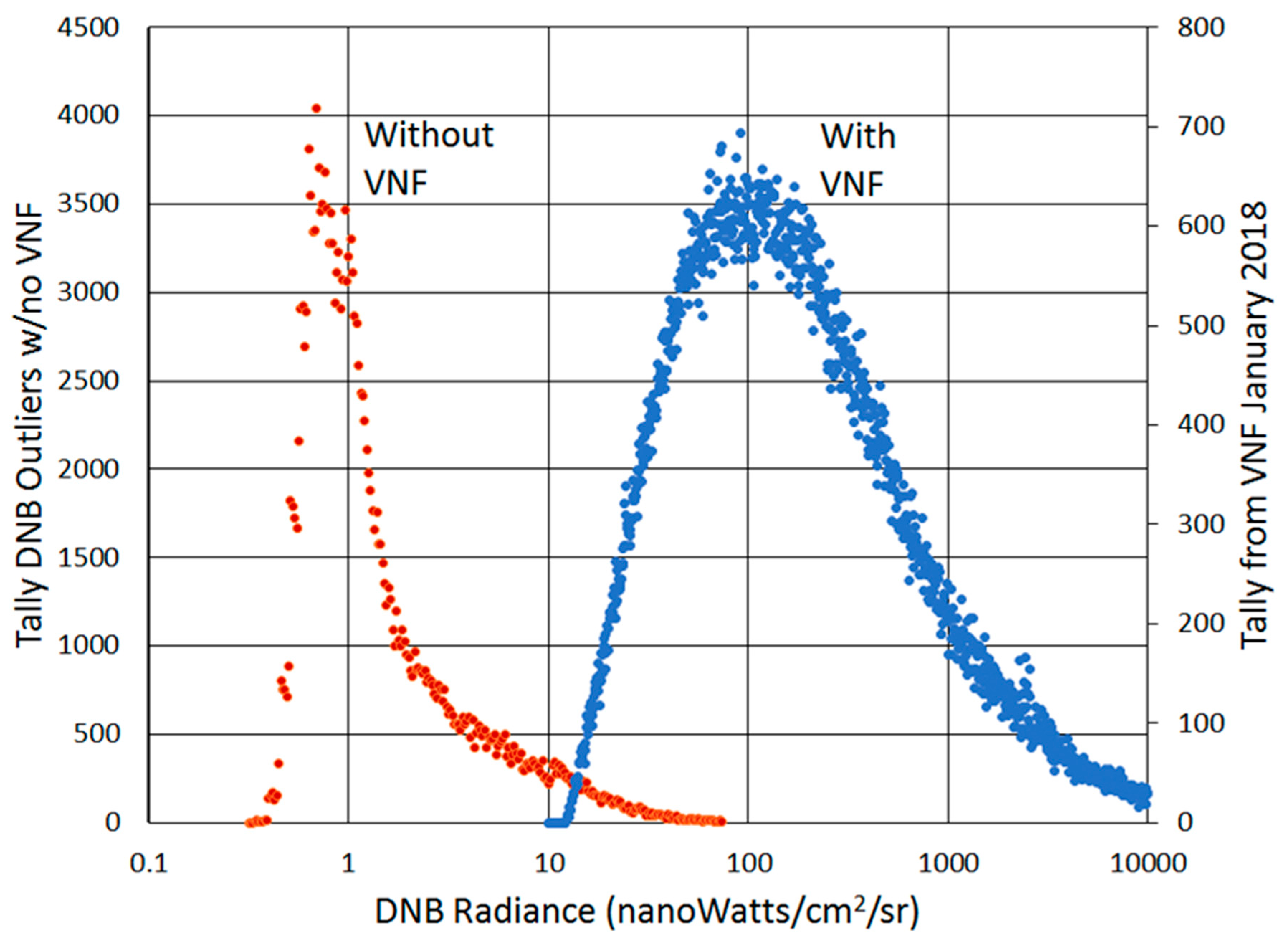
For the calculation of the DNB detection limit we extracted a radiance histogram from the VIIRS boat detection (VBD) database covering Indonesia for the months of January–August 2017. The VBD algorithm searches for spikes in the DNB data [
21]. The extraction was for radiances from pixels rated as having the best quality flag (QF1) indicating the best quality boat detections. The tally of extracted VBD record is 318,921 pixel detections.
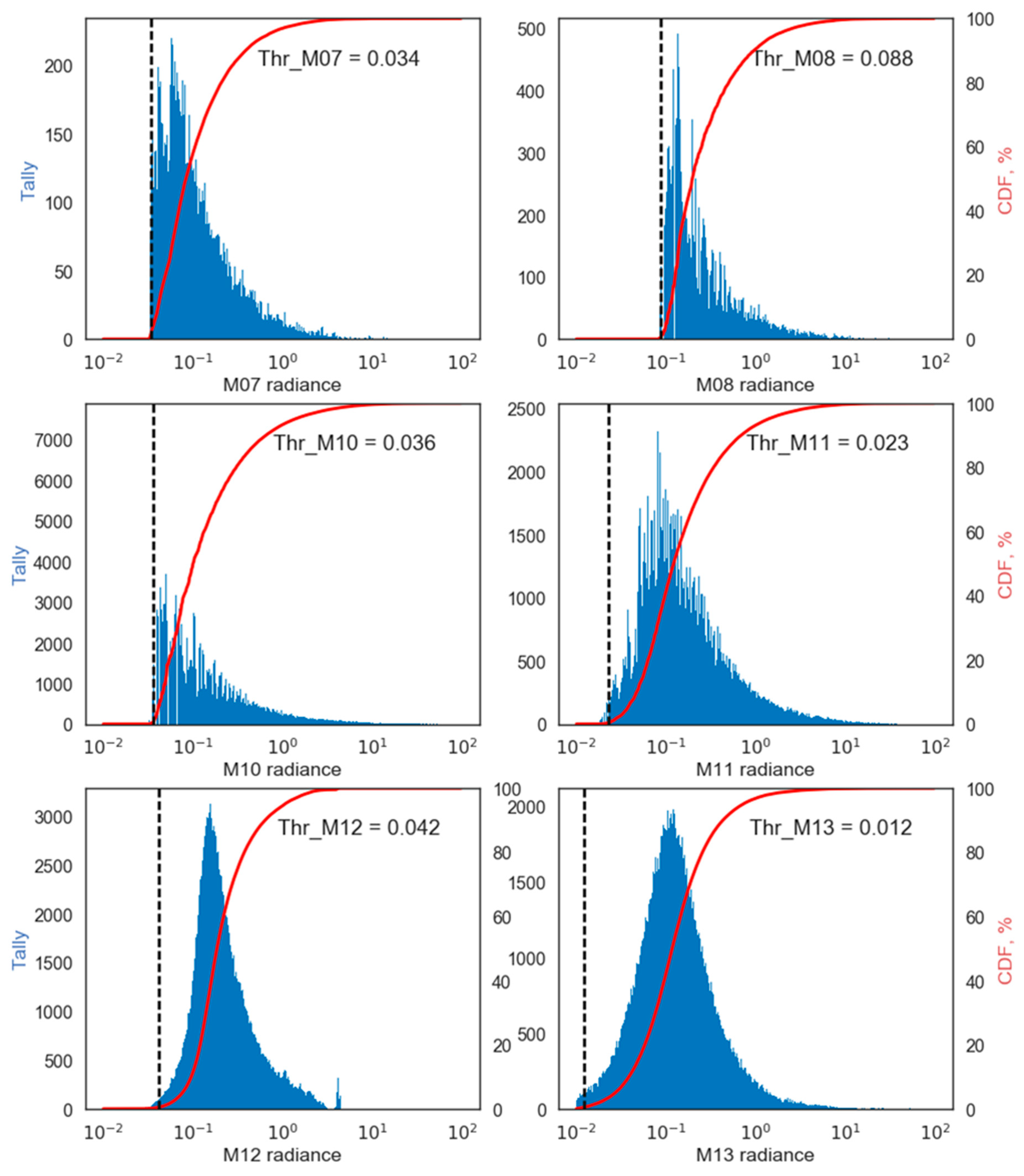
Radiance detection limits were taken as the 0.5% point on the cumulative distribution function (CDF) coming from the radiance histogram generated for each spectral band (
Figure 3 and
Figure 4). The detection limits are listed in
Table 1. Planck’s Law was used to lay out the detection limits in terms of temperature and source area for each spectral band. For each spectral band, the central wavelength and radiance detection limit were used as input. By varying the temperature, curves were defined, indicating detection limits in terms of temperature and source area. Planck’s Law was also used to predict DNB radiances for the VNF test pixel set using the VNF temperatures and source areas.
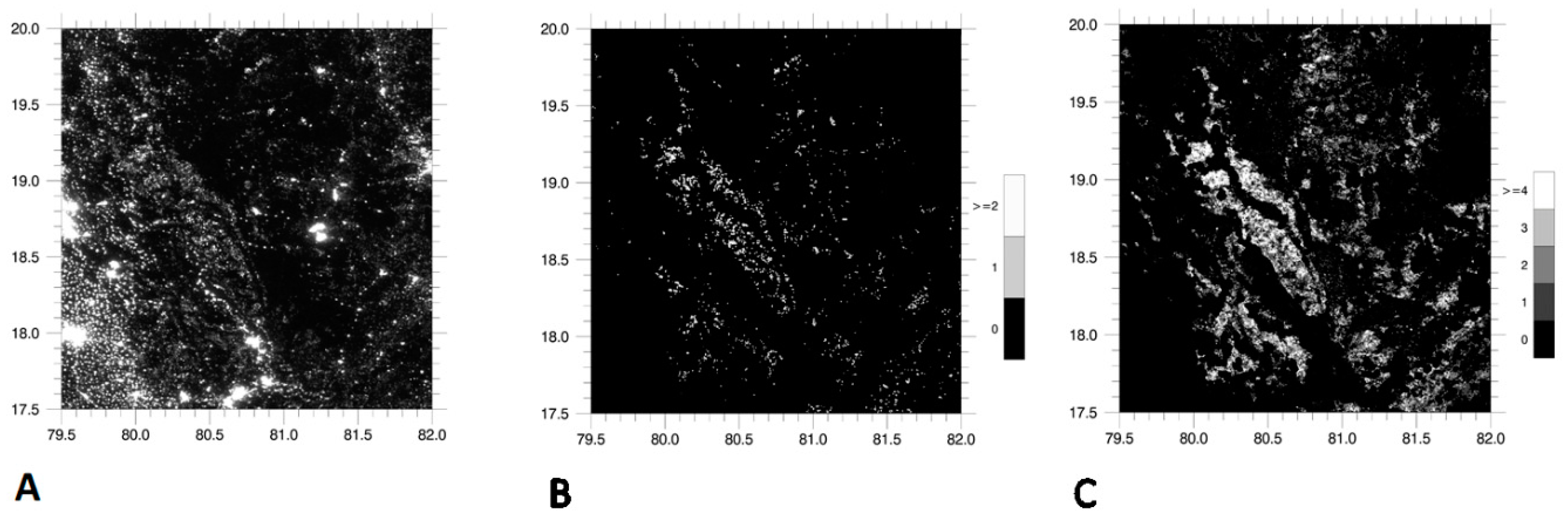
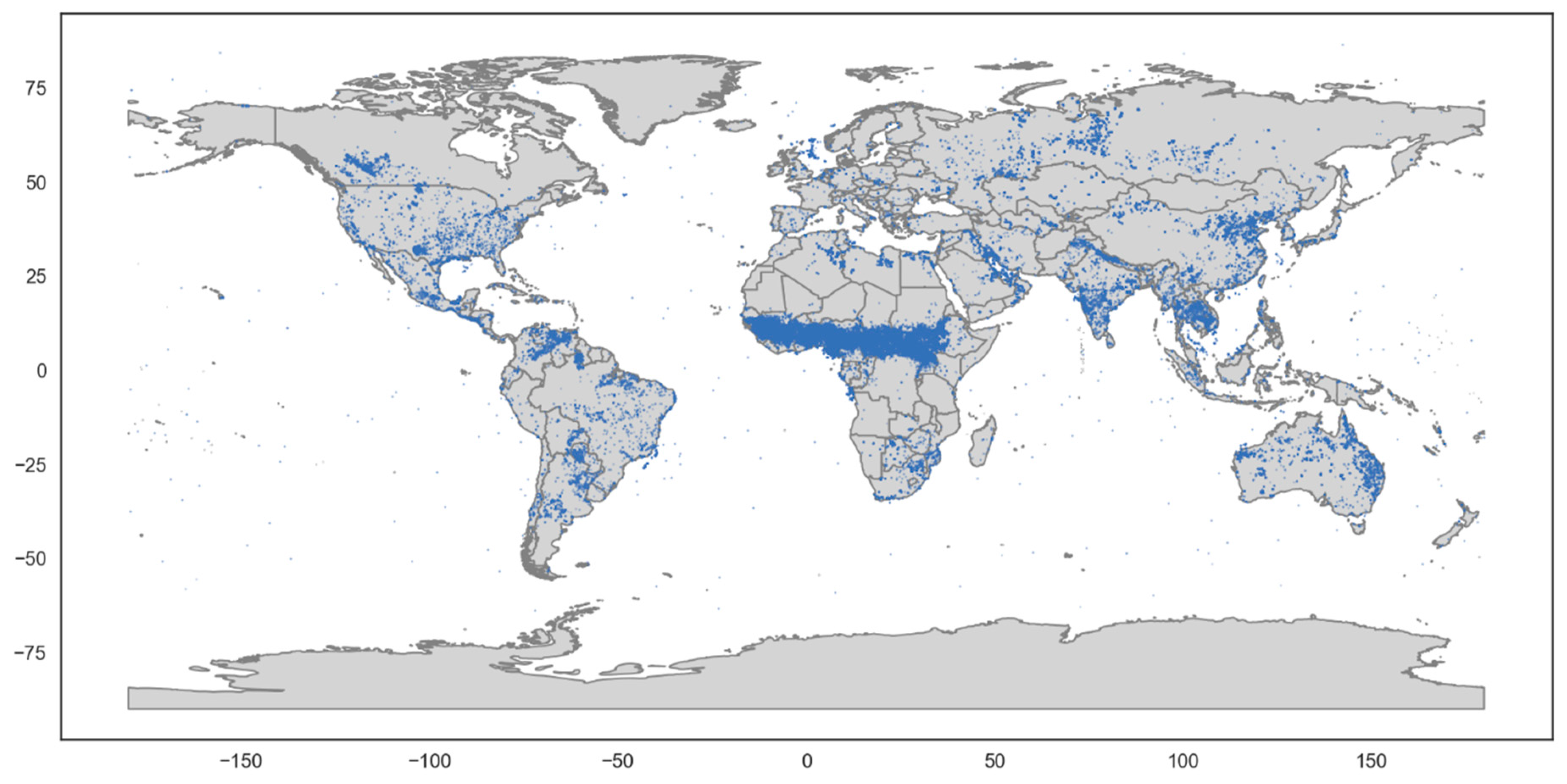
To obtain a sample set of DNB radiances for fires that are undetected by VNF we worked with data from the 2015 VIIRS nighttime lights (VNL) product suite [
22] for a specific study area in Central India, centered on Chhattisgarh State. This is an area with an annual pattern of agricultural burning and numerous lights from cities and towns (
Figure 5). This area was selected based on the presence of large numbers of DNB outlier removed from the nighttime lights product. The 2015 data were first filtered to remove moonlit and pixel labeled as cloudy in the VIIRS cloud mask. We generated a summary grid and radiance histogram for the fraction of DNB pixels that were culled as outliers from the nighttime lights processing that were outside the areas of electric lighting and lacked corresponding VNF detection. The preliminary results for this study area in India were previously reported in 2017 [
16].
5. Discussion
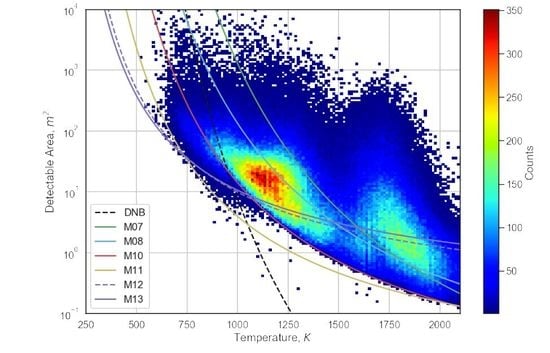
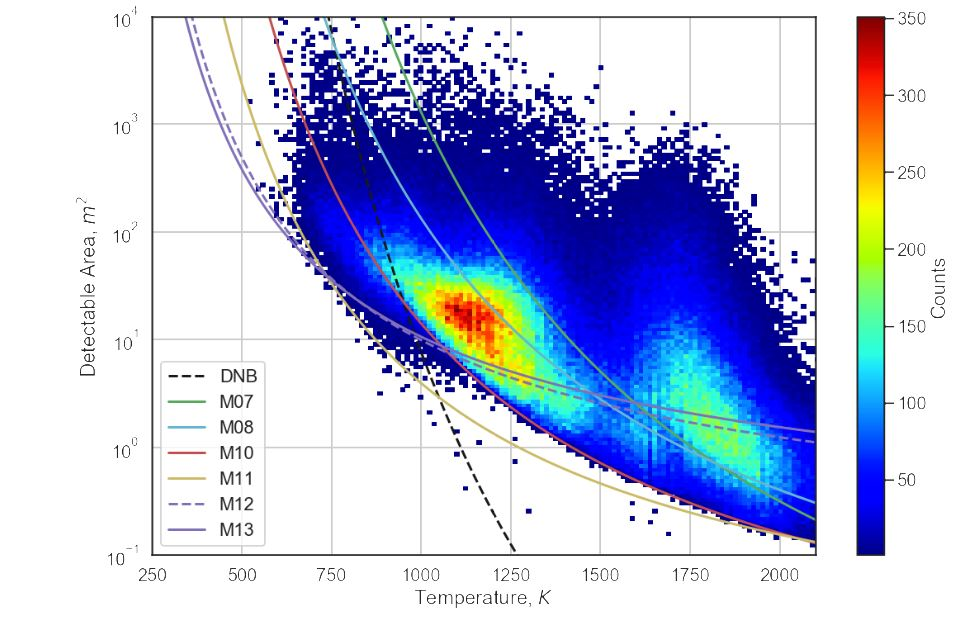
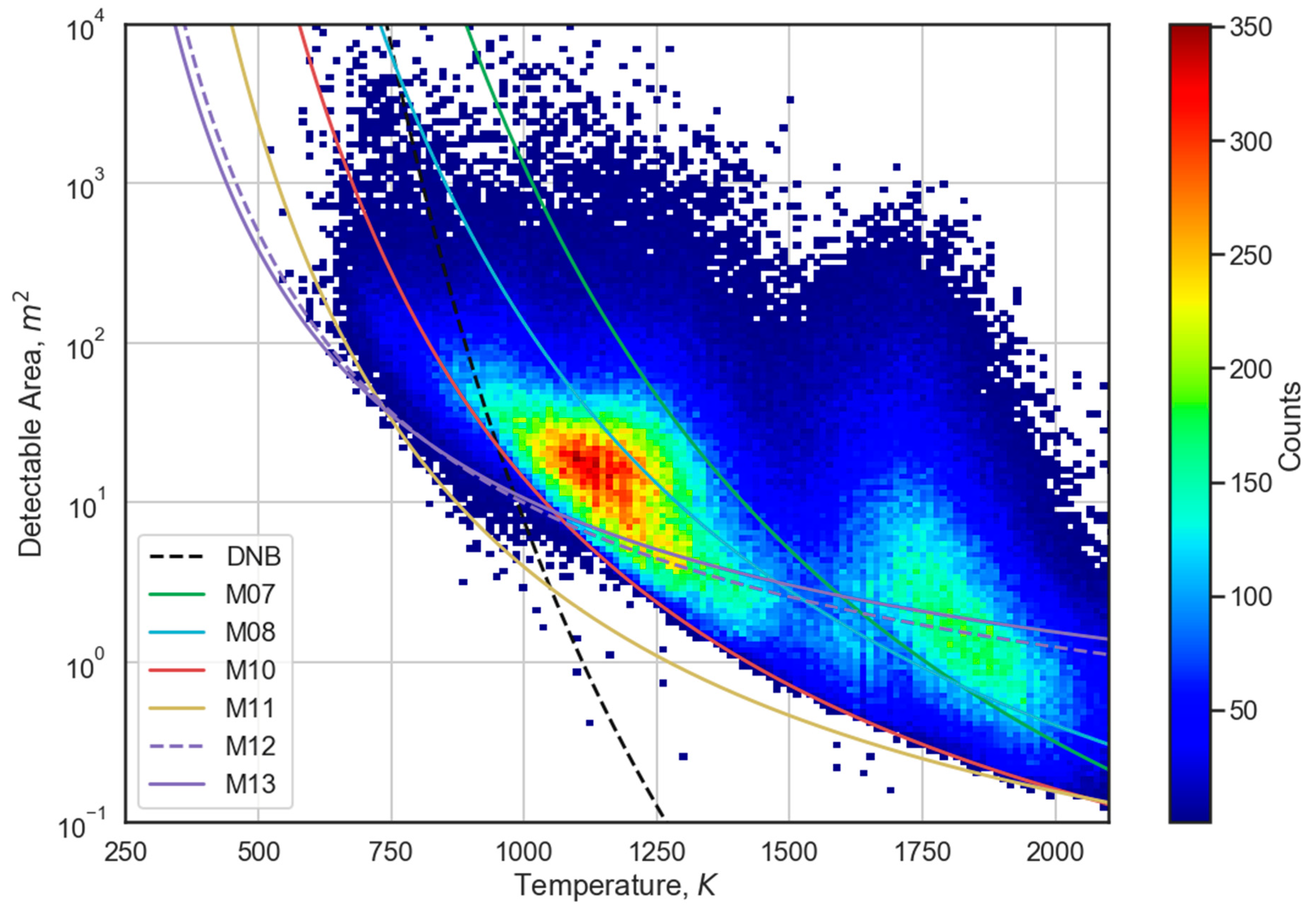
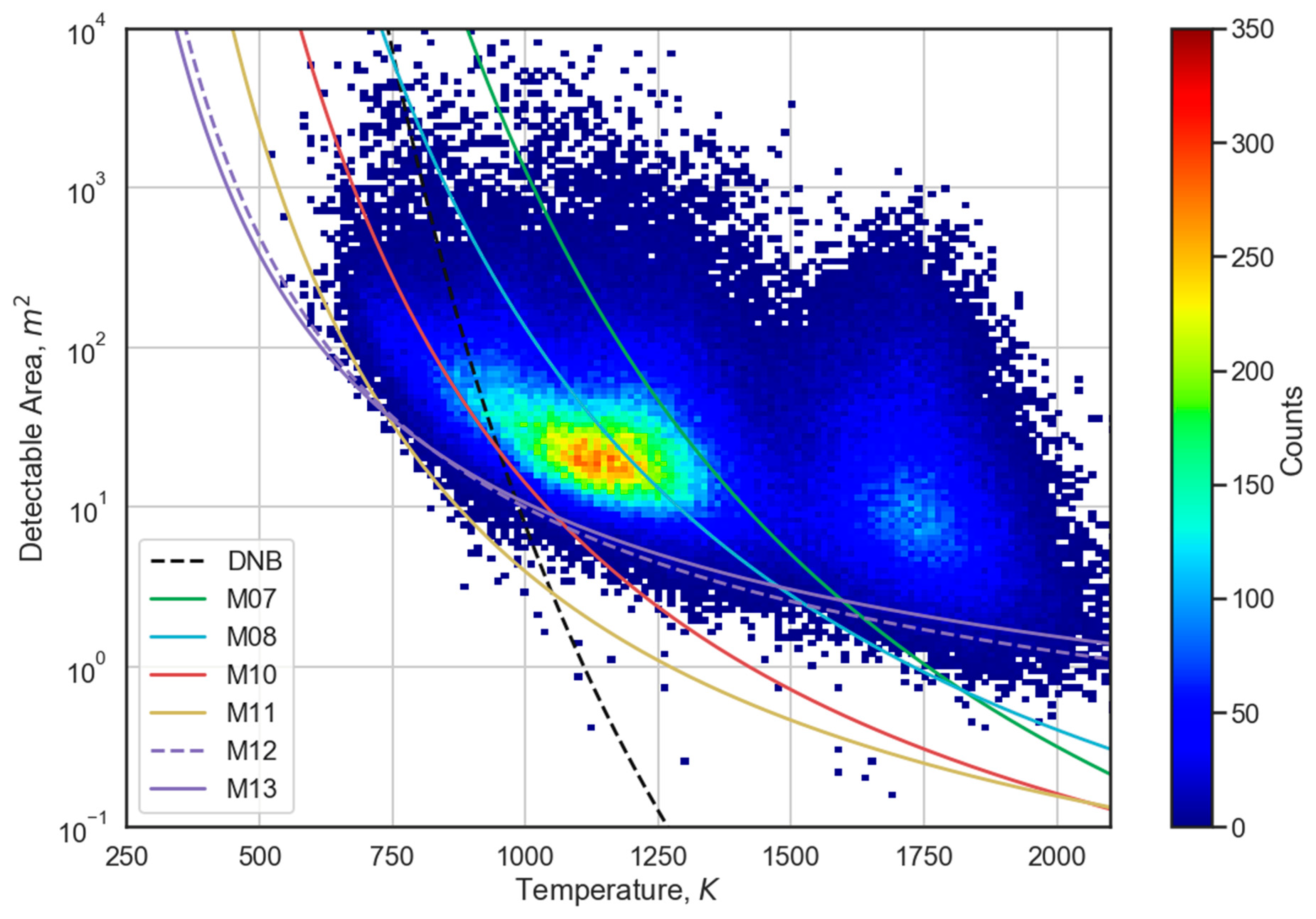
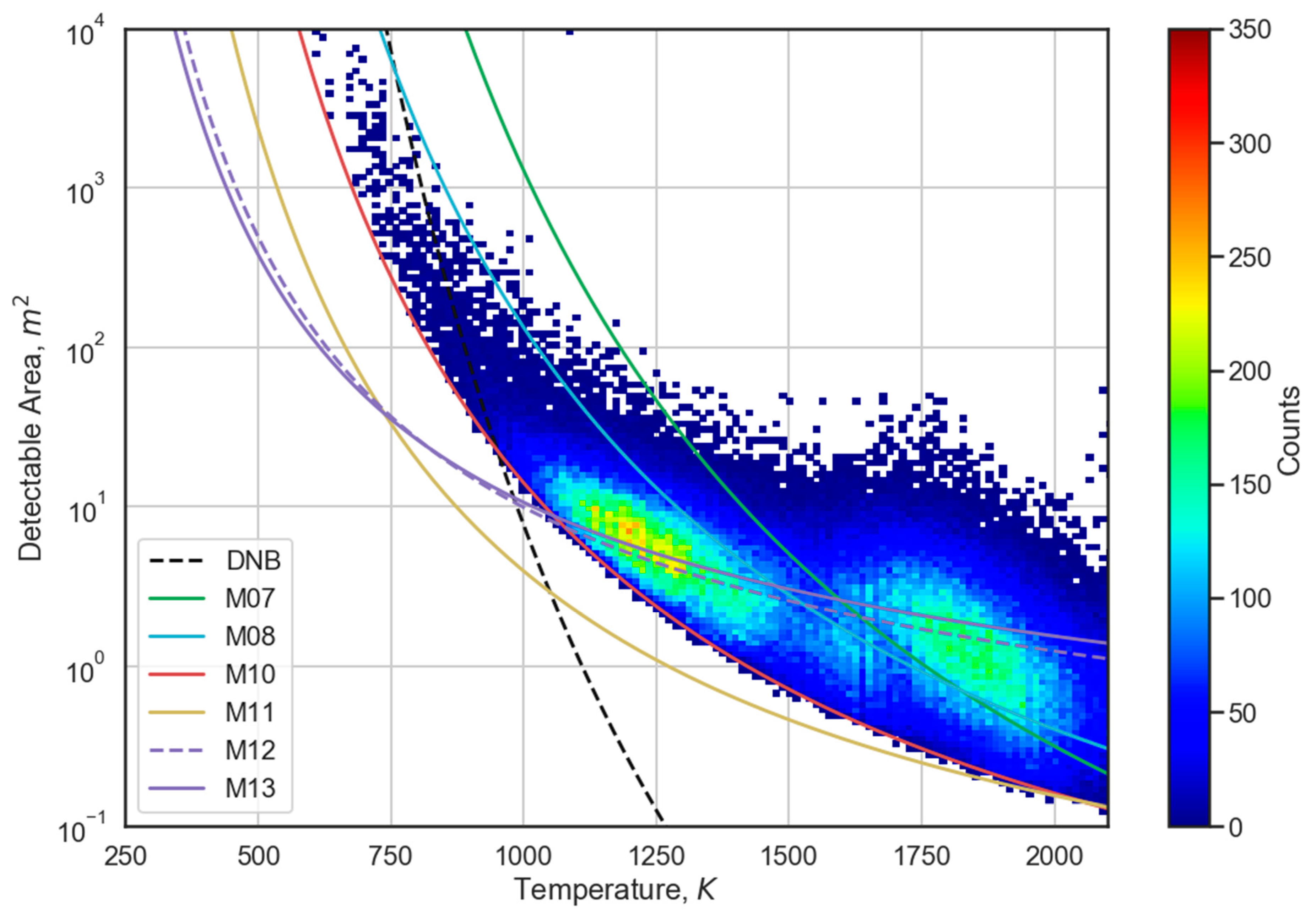
The temperature ranges calculated by VNF range from starts near 700 K and extends past 2000 K. VNF’s source area detection limits are highly dependent on temperature and range from 53 m
2 at 700 K to the 0.26 m
2 at 1800 K, the typical temperature of natural gas flaring. Source area detection limits decline as temperature increases, an expression of the T
4 term present in the Stefan–Boltzmann Law. From
Figure 6 it can be seen that there are two primary clusters of VNF detections. The low temperature VNF cluster runs from 700 to 1500 K and is dominated by biomass burning. There is a high temperature VNF cluster ranging from 1500 to 2100 K dominated by gas flaring. In contrast, the DNB has limited capabilities to detect low temperature biomass burning in the range below 750 K, but exceedingly low detection limits beyond 1000 K, reaching source areas of 0.01 m
2 at 1500 K. At the typical temperature found for natural gas flaring (1800 K) the DNB detection limit is 0.001 m
2, substantially smaller than the M10 detection limit of 0.26 m
2.
The radiance detection limits derived for each spectral band translate into convex curves in terms of temperature versus source area (
Figure 6). At the low temperature end, a larger source area is required to achieve the detection limit radiance. At the high temperature end, a smaller source area will suffice in achieving the radiance detection limit. This is an expression of the Stefan–Boltzmann Law, which contains a T
4 term.
It is possible to interpret the band specific radiance detection limit charts from
Figure 3 starting from the principal that with coarse spatial data such as VIIRS—there are always pixels containing combustion sources too small for detection. This “under-detection” is the combined result of the spectral band detection limits and inefficiencies in the detection algorithms at the low radiance end. The VNF radiance histograms for M11–13 (
Figure 3) are largely symmetrical, trailing off relatively evenly on both the low and high ends of the radiance scale. At the low radiance end for M12–13, the ramp up in detection numbers could be due to the width of the background radiance diagonal. This width results in inefficiency in the detection algorithm at the low end of the radiance scale. The fall off at the high radiance range is due to the natural limits in the size and temperatures of combustion sources in nature. This is also the case for M11 and DNB (
Figure 4). In contrast, the radiance histograms for the three of the short wavelength channels (M 7, 8, and 10) are truncated at the low radiance end. Our interpretation is that this is because the detection limits of M11 is in all cases lower. As a result, there are substantial numbers of M11 VNF detections on either side of the M7, 8, and 10 detection limit lines. There are large numbers of VNF pixels that are below the radiance detection limit for M7, 8, and 10 resulting in a truncation of the histogram at the detection limit line. The histogram truncation can be seen graphically on
Figure 6 detection limit lines pass through the dense clouds of detections with substantial numbers of VNF pixels on either side of the M7, 8, and 10 detection limit lines. Once the M10 detection limit line dips below the M13 line, the VNF detections with temperatures run up to the M10 line and then stop. This behavior is a solid indication that radiance detection limit set for M10 (
Figure 3) are well placed.
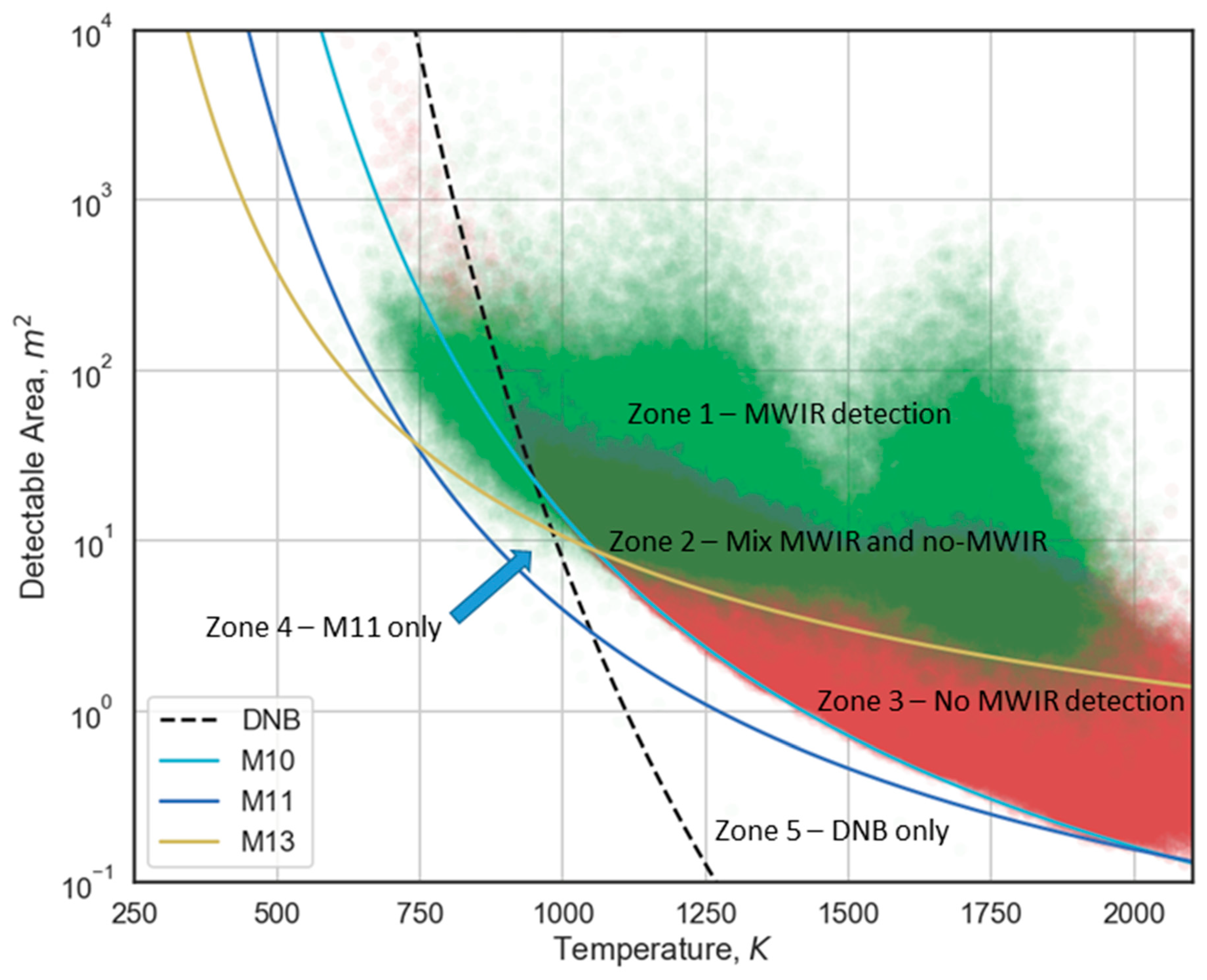
The VIIRS combustion source temperature versus source area space can be divided into five distinct zones (
Figure 18). Four of these zones come from VNF and the fifth comes from the DNB. In the first zone, all the VNF pixels have MWIR detection, complemented in most cases by SWIR detection in M10–11 and in some cases NIR detection in M7–8. The second zone has a mix of detections involving the MWIR and those that lack MWIR. The third zone has no MWIR detection and extends down to the M10 detection limit line. The third zone is out of reach for the operational fire products based on single band MWIR detection. In the fourth zone the VNF detection is in the M11 channel only. It is located above the M11 detection limit line, below the MWIR channel detection limit from 700 to 1100 K and below the M10 line from 1100 to 2100 K. Because the detections are in a single spectral band, it is not possible to calculate temperature or source area, hence the zone is largely empty on
Figure 6. The fifth zone is above the DNB detection limit and below the M11 line. In this zone combustion sources can only be detected by the DNB, but no temperature can be calculated.
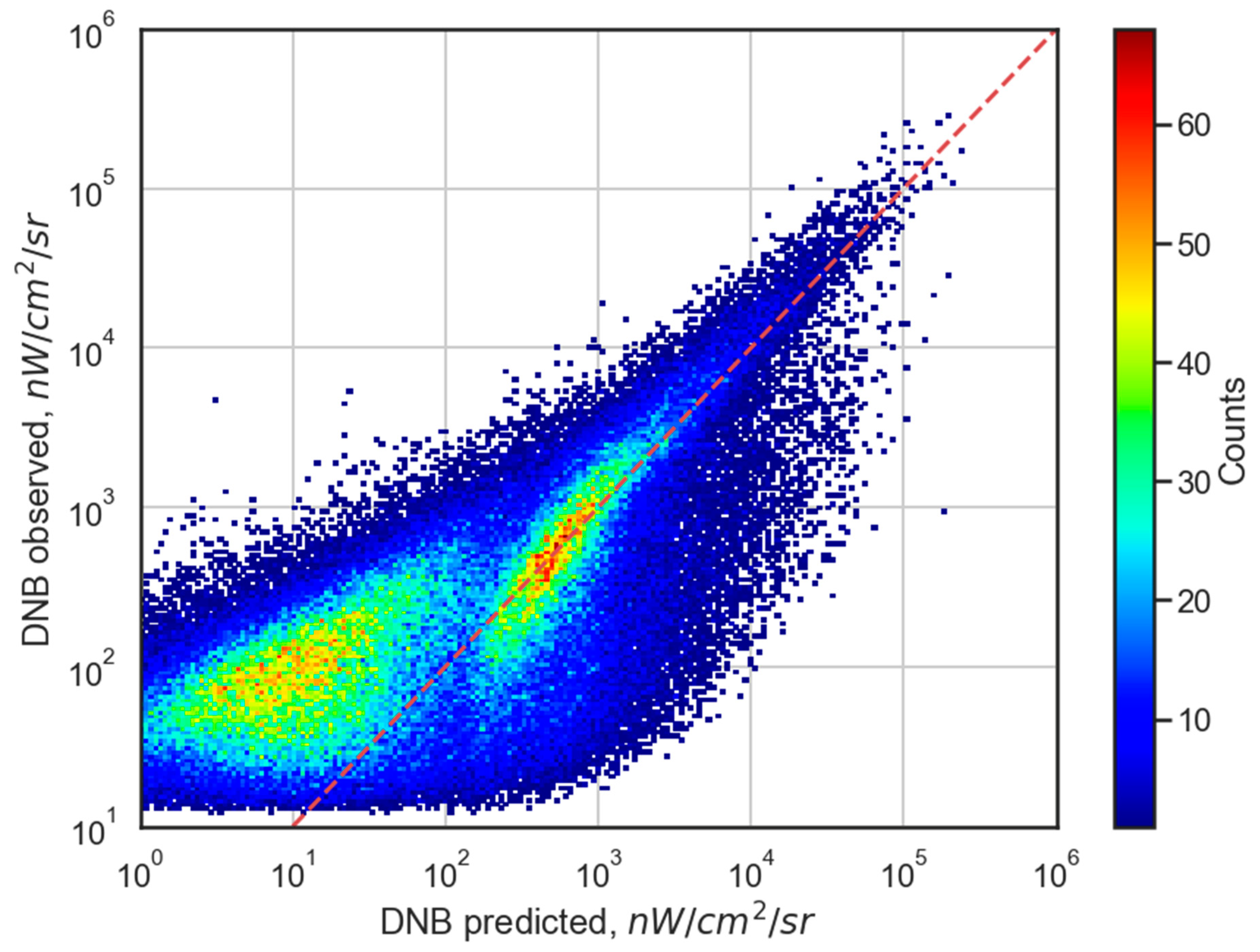
One of the questions that can now be addressed is whether the DNB radiance can be used with other M band radiances in Planck curve modeling. To date, the VNF Planck curve fitting has not included the DNB radiances.
Figure 9 shows the observed versus the Planck curve predicted DNB radiances for the VNF pixel set shown in
Figure 6. As with
Figure 6, there are two clusters present on
Figure 9. The high temperature cluster, corresponding to gas flares, is on the right side of
Figure 9. The low temperature cluster is on the left side of
Figure 9. A dashed diagonal line indicating a precise match between observed and predicted DNB radiances is marked on
Figure 9. For gas flares the observed versus predicted are aligned moderately well with the diagonal line, indicating it may be reasonable to include the DNB radiance in Planck curve fitting in cases where the IR emitter is known to be a high temperature source. For biomass burning the observed DNB radiance is substantially greater than the predicted radiance, in some case by a factor of ten. Smoke obscuration likely impacts the DNB more that SWIR and MWIR. However, smoke obscuration in DNB would logically decrease the observed radiance [
25], opposite to the pattern shown for biomass burning in
Figure 9. It is known that biomass burning emission spectra contains a narrowly spaced set of strong potassium emission lines in the range of 0.76 to 0.77 μm [
26]. The Potassium content of wood ashes are reported to be in the 5–7% range [
27] and that there is substantial variation in this number across different plant materials [
28]. However, it is not clear what portion of the enhanced radiance in the DNB from biomass burning pixels can be explained by the Potassium emission lines. It appears that additional research would be required to better understand the potential role the DNB radiances could play in the VNF product.
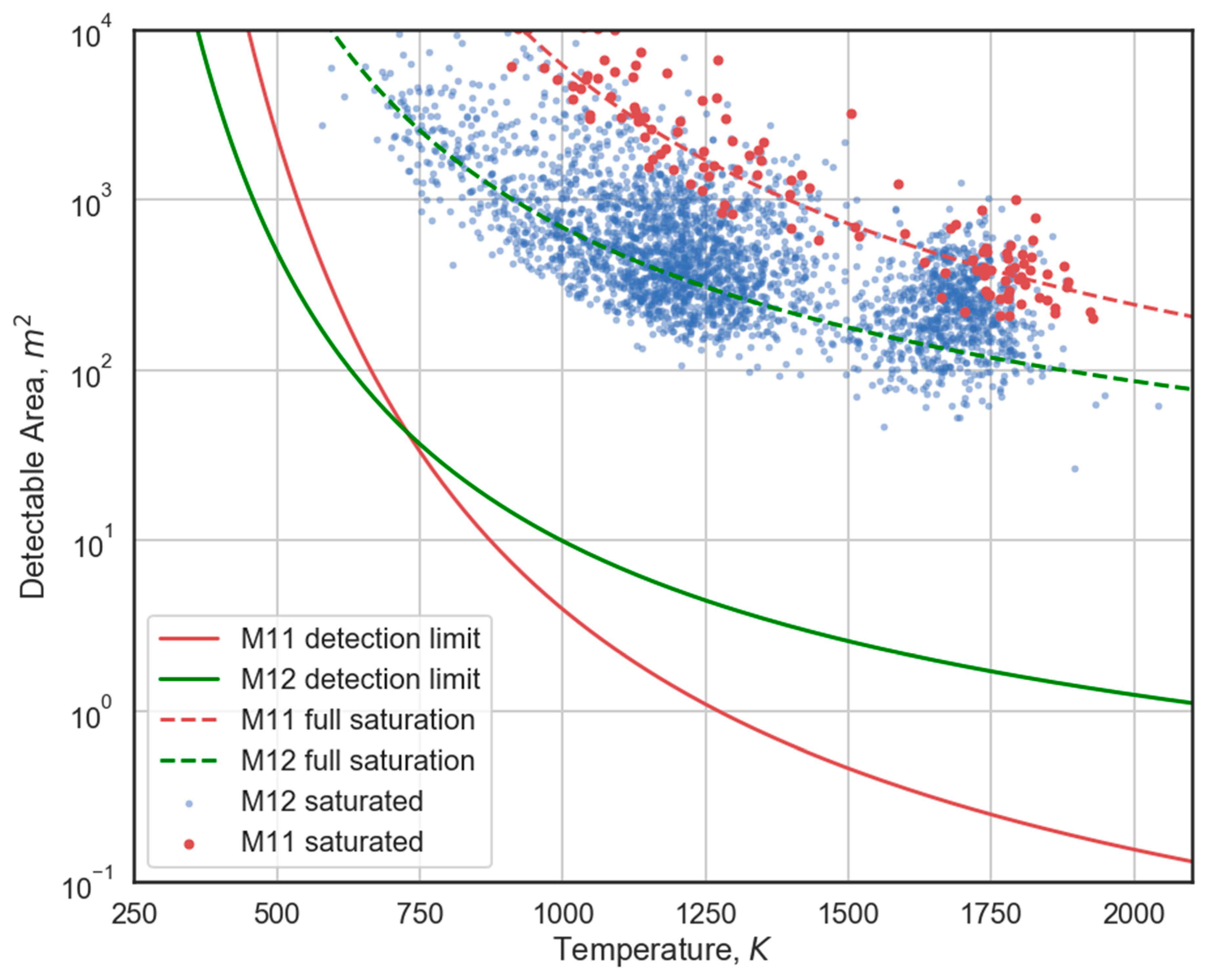
The vast majority of false detections, such as those from HEPD, are filtered out of the VNF pixel set with temperature calculation. The two pixel sets that retain HEPD false detections are the M11 single band and M12/M13 only detections. VNF removes nearly all the M11 HEPD false detections by filtering out isolated detections that lack adjacency. This filtering would likely remove most of the M12/M13 HEPD false detections, though this has not yet been implemented. Full pixel and subpixel saturation occurs in about 1% of the VNF detections, primarily affecting the M11 and M12 spectral bands. Inclusion of the saturated radiances results in errors in temperature and source area. These errors can be avoided by conducting the Planck curve fitting without the saturation affected radiances.
6. Conclusions
Traditional satellite fire detection algorithms that rely on a MWIR spectral channel for detection have the advantage of working under both day and night conditions. However, there are three known shortcomings. First, with detection in a single spectral band it is not possible to fit the Planck curve for the IR emitter, which would enable temperature, source area and radiant heat calculations with physical laws. That is why fire radiative power (FRP) is estimated for limited temperature range based on an empirical calibration rather than the Stephan–Boltzmann Law. Second, the MWIR channel data, designed for meteorological applications, can only detect the upper size range of pixels containing IR emitters. Combustion source detection limits can be extended to lower levels at night by including NIR and SWIR data. In the test data set, adding in the short wavelengths M band channels doubled the number of detections having temperature calculations. Adding in the M11 only detections (lacking temperatures) provides a 55% augmentation in the overall detection numbers.
Inclusion of the SWIR bands gives VNF an improved ability to detect gas flares [
29], which are about twice as hot as biomass burning [
13]. Gas flares burn at near 1800 K, which places their peak radiant emission near the central wavelength of the M10 spectral band which can detect flares as small as 0.26 m
2. The DNB can detect even smaller flares, however without the VNF there is an ambiguity in that many flaring sites also have electric lighting, also detectable by the DNB.
The primary error sources affecting VNF are high energy particle detections (HEPD) and radiance saturation. The HEPD are present in all spectral bands and the vast majority of these are blocked from the VNF output by requiring detection in multiple spectral bands for the Planck curve fitting. The exception to this are the HEPD detections in the MWIR bands (M12 and M13). M11 has the lowest detection limits of all the M bands and VNF has a pixel class for M11 single band detections. Here, HEPD and residual background noise are filtered out by removing solitary M11 detections. Saturation primarily affects M12 and to a lesser extent M11. M12 saturation is present in about 1% of the VNF pixels worldwide. Inclusion of the saturation affected radiances would introduce errors in the temperature, source area and radiant heat calculations. VNF’s Planck curve fitting algorithm detects the presence of saturation and other radiance irregularities, making it possible to exclude affected radiances to avoid introducing errors in the output.
In cases where there is VNF detection in multiple spectral bands it may not make sense to include the DNB in the Planck curve fitting due to the wide range of phenomena detected (electric lights, fires, flares, aurora, and moonlit clouds). However, in M11 only detections, an argument could be made to include the DNB radiance in order to calculate the temperature, source area and radiant heat. Obviously, the error levels will rise, as shown with the non-linearity in
Figure 9.
The extremely low detection limits of the DNB results in small source area IR emitter detections that are unseen by VNF. These fall into zone 5 on
Figure 18. The density of IR emitter detections in zone 5 is likely highly variable. The study in India found the DNB had 15 times the number of VNF detections for the same set of nights. This is likely at the high end of the range. In a similar analysis, Polivka et al. [
30] found less than a doubling of fire detections in the DNB over MWIR detections. Should it be surprising that is some case the zone 5 detections exceed all the other zones in
Figure 18? It is well established that in nature, size distributions are skewed towards the small [
31]. This points to the potential value of a DNB fire product to augment VNF and other satellite fire products.
A DNB fire detection algorithm could be developed, building on the methods developed to detect fire in DMSP-OLS low light imaging data in the mid-1990’s [
31]. A recent publication alluded to this possibility with VIIRS data [
32]. It is clear that the DNB has the capacity to substantially expand the number of detected subpixel combustion source detections. However, DNB fire detection is restricted to zones outside of electric lighting. The screening of electric lighting can be done using an up-to-date map of persistent DNB lighting. This was the basis of the DMSP fire detection algorithm developed two decades ago [
32].






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}