A New Method for Large-Scale Landslide Classification from Satellite Radar

Abstract
1. Introduction
2. Materials and Methods
2.1. Theory: Landslide Detection with SAR
2.1.1. Synthetic Aperture Radar: Interferometry and Coherence
2.1.2. Absolute Coherence Method
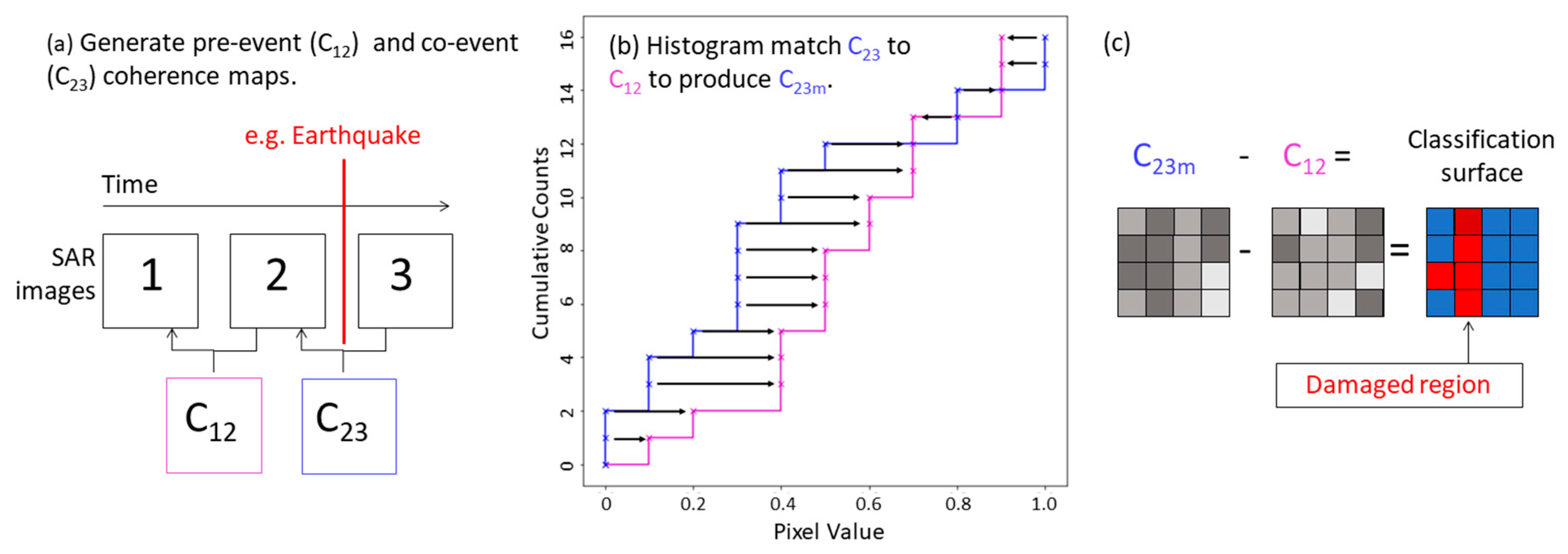
2.1.3. ARIA Method
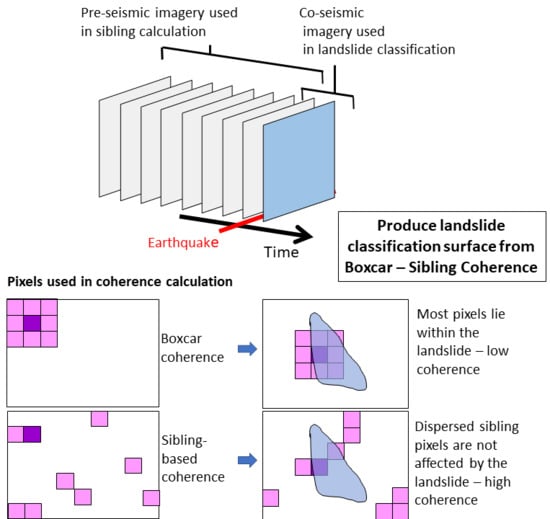
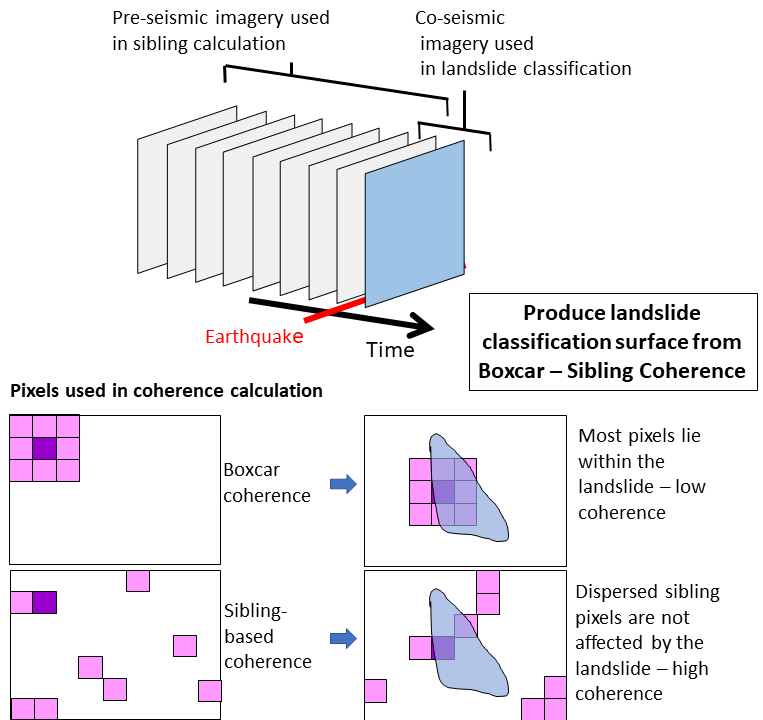
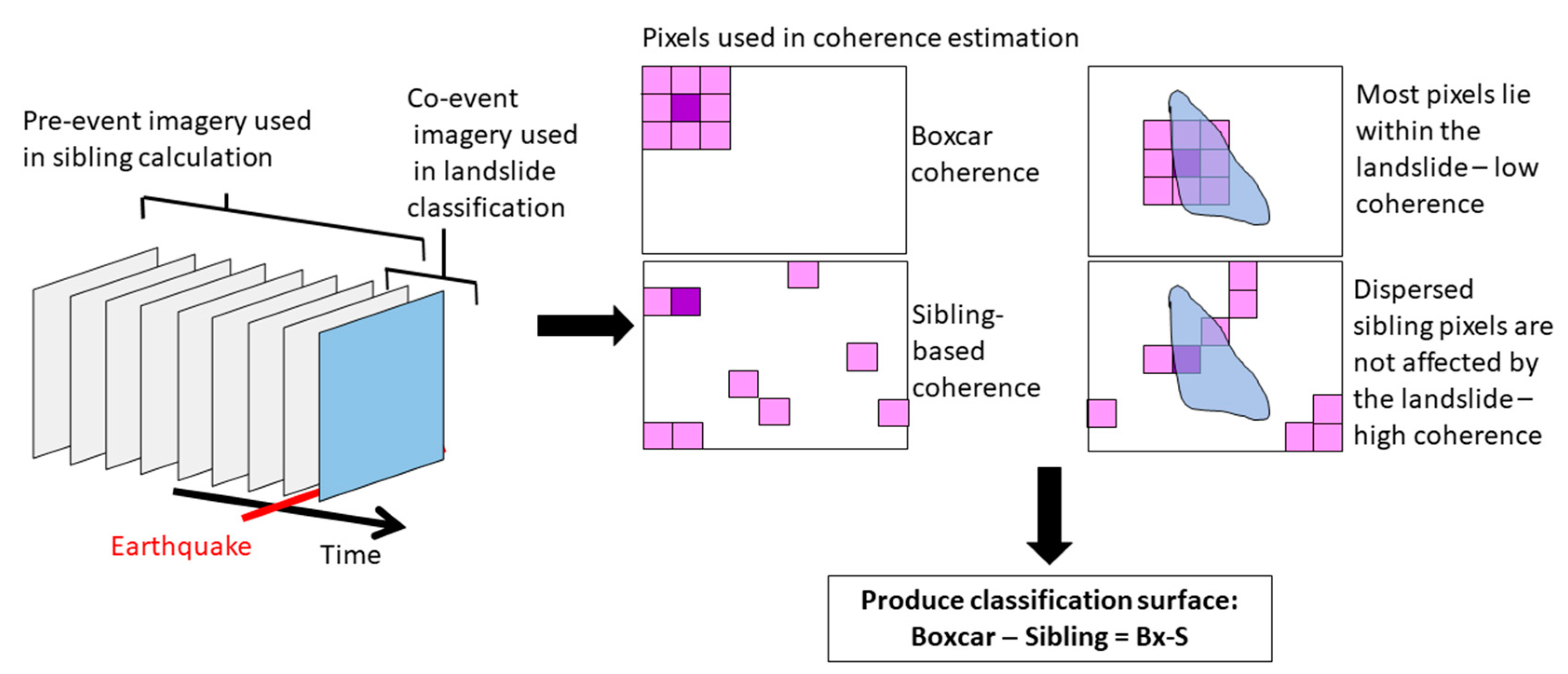
2.1.4. Sibling-Based Coherence Method
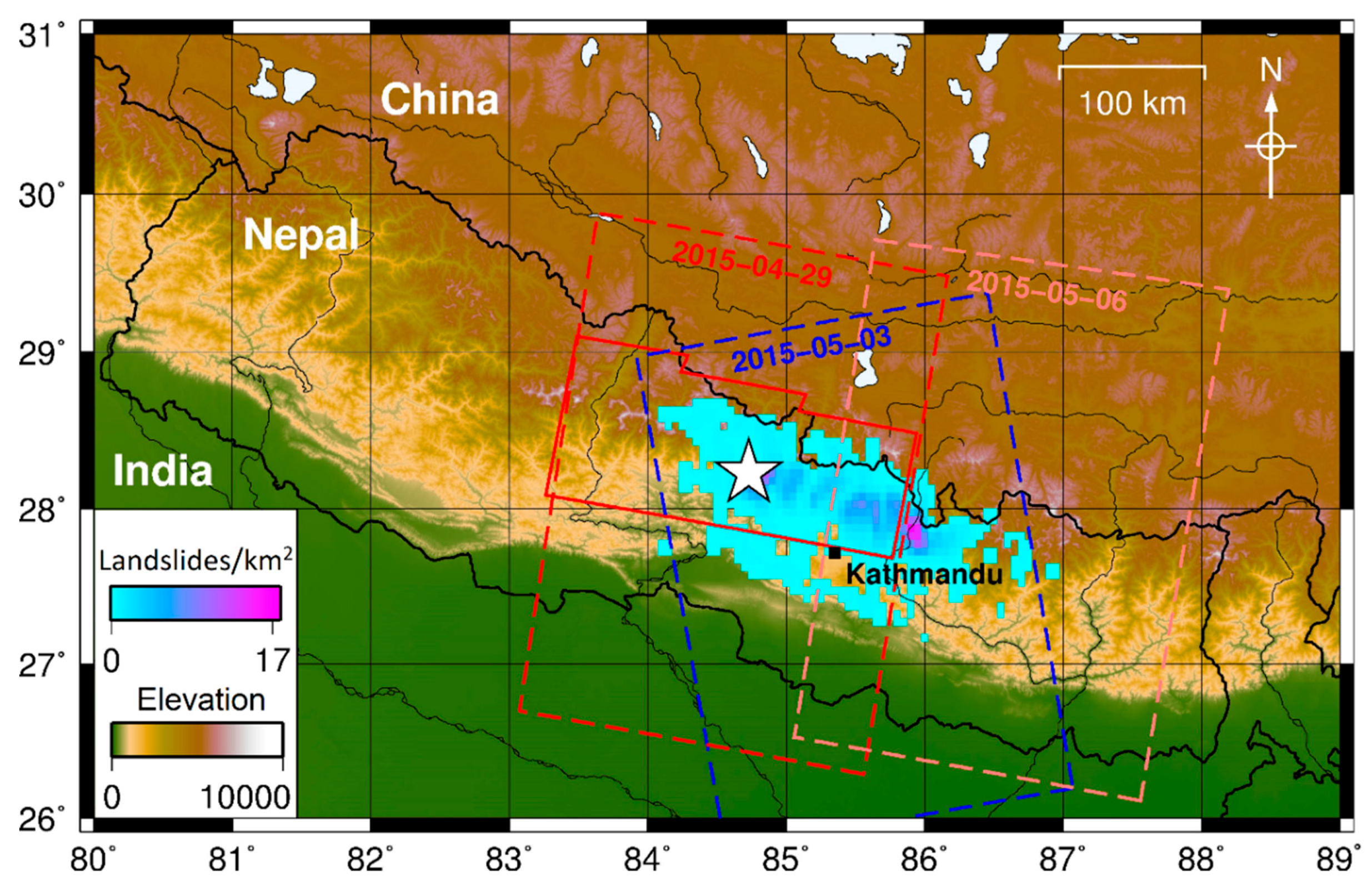
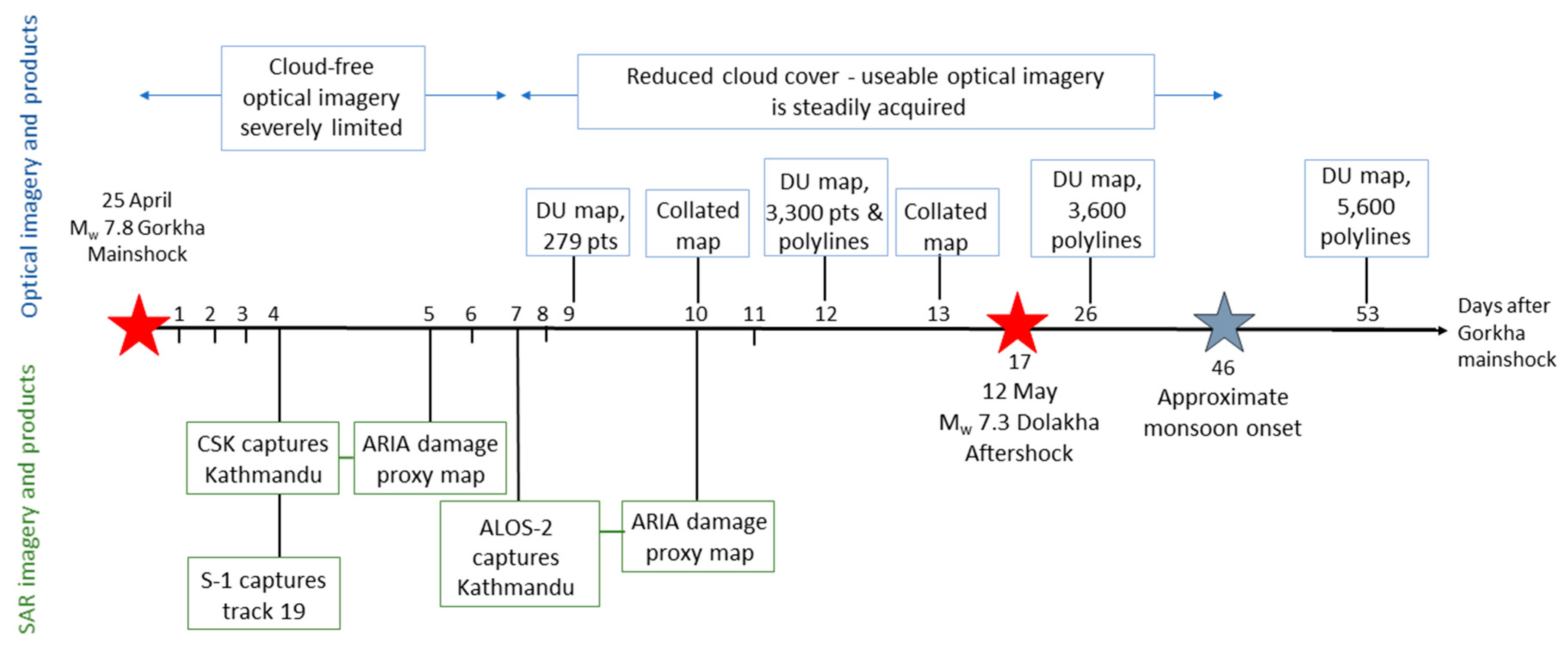
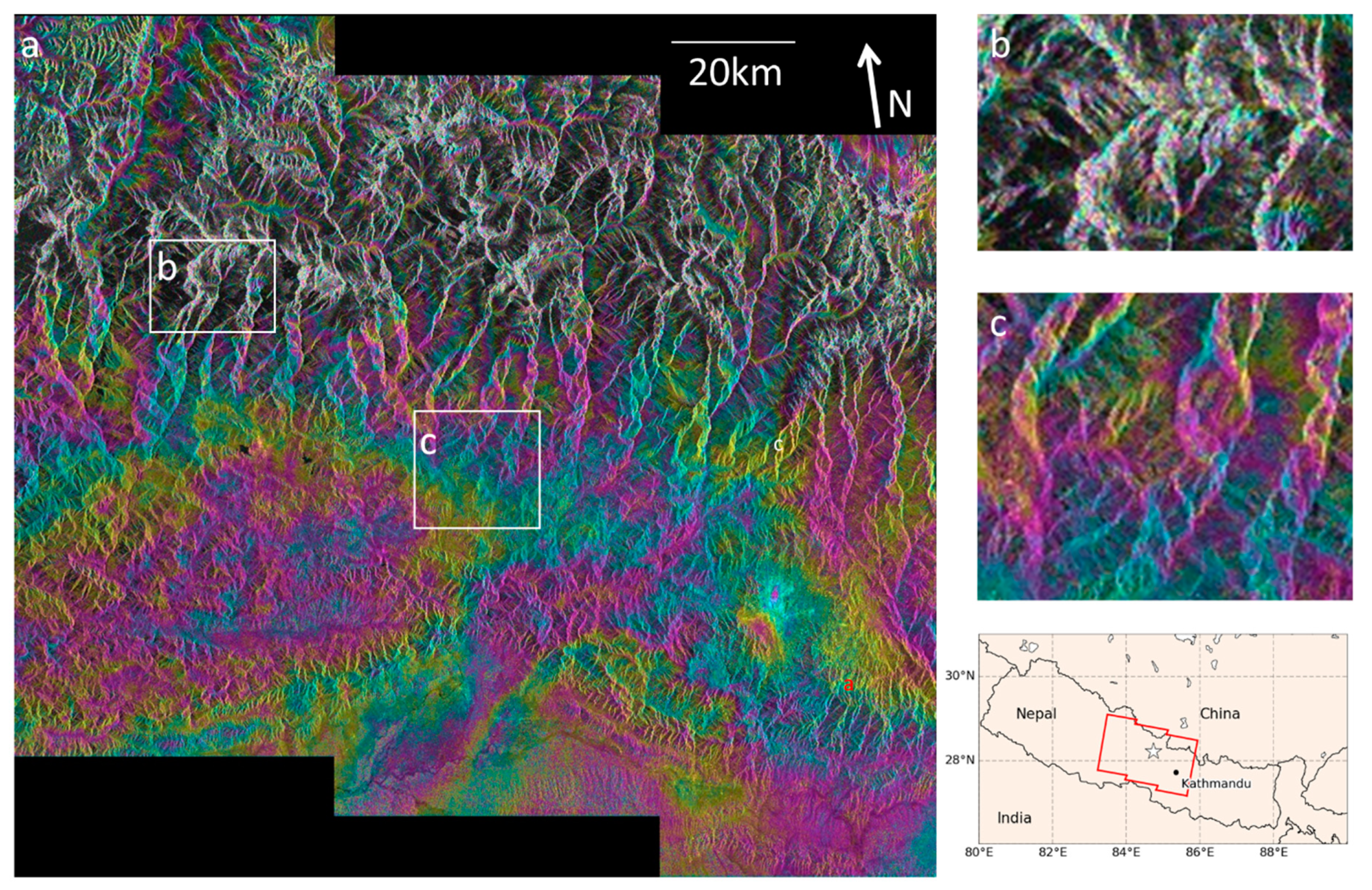
2.2. Case Study: The 2015 Gorkha Earthquake
2.2.1. Validation Data
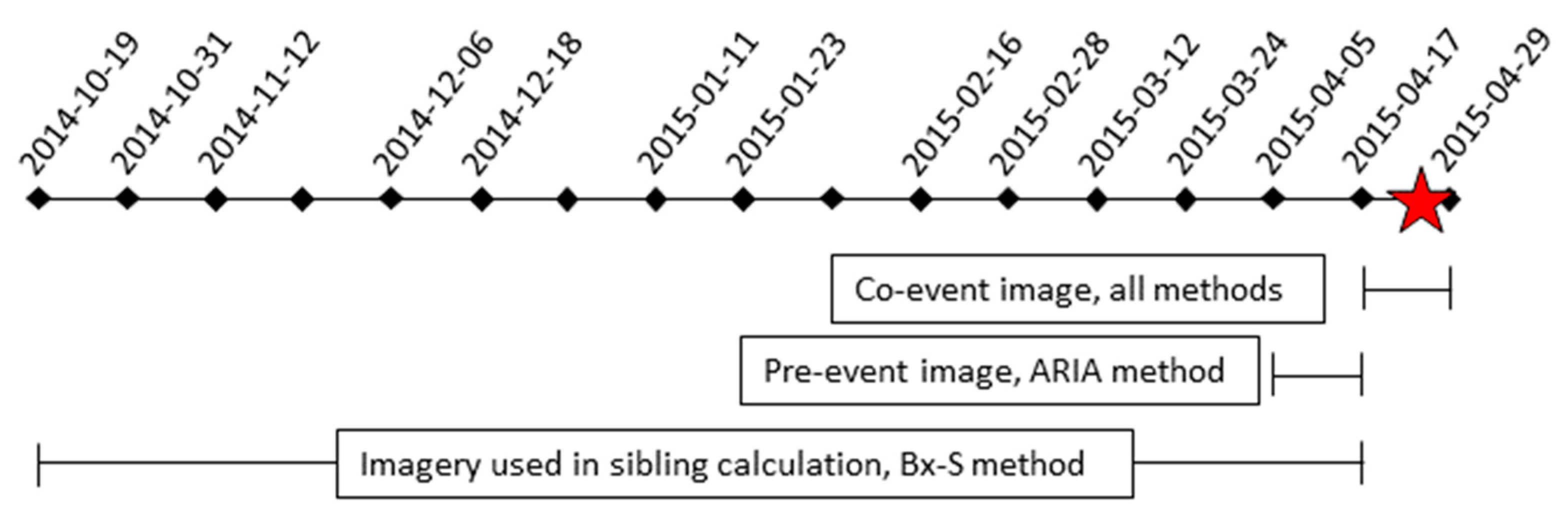
2.2.2. SAR Data and Processing
2.2.3. ROC Analysis
2.2.4. Masks
3. Results
4. Discussion
4.1. Pixel Aggregation
4.2. The Maximum Detectable Landslide Size
4.3. Ascending and Descending Track SAR
4.4. Combining Classifiers
4.5. SAR Frequency Band
4.6. Alternative Methods of Coherence Estimation
4.7. Application
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

References
- Xu, C.; Xu, X.; Tian, Y.; Shen, L.; Yao, Q.; Huang, X.; Ma, J.; Chen, X.; Ma, S. Two comparable earthquakes produced greatly different coseismic landslides: The 2015 Gorkha, Nepal and 2008 Wenchuan, China events. J. Earth Sci. 2016, 27, 1008–1015. [Google Scholar] [CrossRef]
- Roback, K.; Clark, M.K.; West, A.J.; Zekkos, D.; Li, G.; Gallen, S.F.; Chamlagain, D.; Godt, J.W. The size, distribution, and mobility of landslides caused by the 2015 Mw 7.8 Gorkha earthquake, Nepal. Nat. Hazards Earth Syst. Sci. 2017, 17, 1521–1540. [Google Scholar] [CrossRef]
- Marano, K.D.; Wald, D.J.; Allen, T.I. Global earthquake casualties due to secondary effects: A quantative analysis for improving rapid loss analyses. Nat. Hazards 2010, 52, 319–328. [Google Scholar] [CrossRef]
- Cui, P.; Zhu, Y.Y.; Han, Y.S.; Chen, X.Q.; Zhuang, J.Q. The 12 May Wenchuan earthquake-induced landslide lakes: Distribution and preliminary risk evaluation. Landslides 2009, 6, 209–223. [Google Scholar] [CrossRef]
- Global Logistics Cluster. Nepal Lessons Learned Report. 2016. Available online: http://www.logcluster.org/global-meeting-document/nepal-lessons-learned-report (accessed on 19 June 2017).
- Collins, B.D.; Jibson, R.W. Assessment of Existing and Potential Landslide Hazards Resulting from the April 25, 2015 Gorkha, Nepal Earthquake Sequence; US Geological Survey: Reston, WV, USA, 2015.
- Datta, A.; Sigdelm, S.; Oven, K.; Rosser, N.; Densmore, A.; Rijal, S. The Role of Scientific Evidence during the 2015 Nepal Earthquake Relief Efforts; Overseas Development Institute Report: London, UK, 2018. [Google Scholar]
- Fiedrich, F.; Gehbauer, F.; Rickers, U. Optimized resource allocation for emergency response after earthquake disasters. Saf. Sci. 2000, 35, 41–57. [Google Scholar] [CrossRef]
- Williams, J.G.; Rosser, N.J.; Kincey, M.E.; Benjamin, J.; Oven, K.J.; Densmore, A.L.; Milledge, D.G.; Robinson, T.R.; Jordan, C.A.; Dijkstra, T.A. Satellite-based emergency mapping using optical imagery: Experience and reflections from the 2015 Nepal earthquakes. Nat. Hazards Earth Syst. Sci. 2018, 18, 185–205. [Google Scholar] [CrossRef]
- Heleno, S.; Matias, M.; Pina, P.; Sousa, A.J. Semiautomated object-based classification of rain-induced landslides with VHR multispectral images on Madeira Island. Nat. Hazards Earth Syst. Sci. 2016, 16, 1035–1048. [Google Scholar] [CrossRef]
- The British Geological Survey. Ecuador Disaster Response 2016. Available online: http://www.bgs.ac.uk/research/earthHazards/epom/ecuadorEarthquake.html (accessed on 8 July 2018).
- Kritikos, T.; Robinson, T.R.; Davies, T.R. Regional coseismic landslide hazard assessment without historical landslide inventories: A new approach. J. Geophys. Res. Earth 2015, 120, 711–729. [Google Scholar] [CrossRef]
- Gallen, S.F.; Clark, M.K.; Godt, J.W.; Roback, K.; Niemi, N.A. Application and evaluation of a rapid response earthquake-triggered landslide model to the 25 April 2015 Mw 7.8 Gorkha earthquake, Nepal. Tectonophysics 2017, 714, 173–187. [Google Scholar] [CrossRef]
- Robinson, T.; Rosser, N.; Densmore, A.; Williams, J.; Kincey, M.; Benjamin, J.; Bell, H. Rapid post-earthquake modelling of coseismic landslide magnitude and distribution for emergency response decision support. Nat. Hazards Earth Syst. Sci. 2017, 17, 1521–1540. [Google Scholar] [CrossRef]
- Dixit, A.M.; Ringler, A.T.; Sumy, D.F.; Cochran, E.S.; Hough, S.E.; Martin, S.S.; Gibbons, S.; Luetgert, J.H.; Galetzka, J.; Shrestha, S.N.; et al. Strong-motion observations of the M 7.8 Gorkha, Nepal, earthquake sequence and development of the N-SHAKE strong-motion network. Seismol. Res. Lett. 2015, 86, 1533–1539. [Google Scholar] [CrossRef]
- Elliott, J.R.; Walters, R.J.; Wright, T.J. The role of space-based observation in understanding and responding to active tectonics and earthquakes. Nat. Commun. 2016, 7, 13844. [Google Scholar] [CrossRef]
- Sentinel-1. European Space Agency. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-1/ (accessed on 2 August 2018).
- Martinis, S.; Kersten, J.; Twele, A. A fully automated TerraSAR-X based flood service. ISPRS J. Photogramm. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Meyer, F.J.; McAlpin, D.B.; Gong, W.; Ajadi, O.; Arko, S.; Webley, P.W.; Dehn, J. Integrating SAR and derived products into operational volcano monitoring and decision support systems. ISPRS J. Photogramm. 2015, 100, 106–117. [Google Scholar] [CrossRef]
- NASA. Advanced Rapid Imaging and Analysis (ARIA) Project for Natural Hazards. Available online: https://aria.jpl.nasa.gov/ (accessed on 27 June 2018).
- Yun, S.-H.; Hudnut, K.; Owen, S.; Webb, F.; Simons, M.; Sacco, P.; Gurrola, E.; Manipon, G.; Liang, C.; Fielding, E.; et al. Rapid Damage Mapping for the 2015 Mw 7.8 Gorkha Earthquake Using Synthetic Aperture Radar Data from COSMO-SkyMed and ALOS-2 Satellites. Seismol. Res. Lett. 2015, 86, 1549–1556. [Google Scholar] [CrossRef]
- Mulas, M.; Corsini, A.; Cuozzo, G.; Callegari, M.; Thiebes, B.; Mair, V. Quantitative monitoring of surface movements on active landslides by multi-temporal, high resolution X-band SAR amplitude information: Preliminary Results. In Proceedings of the 12th International Symposium on Landslides, Napoli, Italy, 12–19 June 2016; pp. 1511–1516. [Google Scholar]
- Confuorto, P.; Di Martire, D.; Centolanza, G.; Iglesias, R.; Mallorqui, J.J.; Novellino, A.; Plank, S.; Ramondini, M.; Thuro, K.; Calcaterra, D. Post-failure evolution analysis of a rainfall-triggered landslide by multi-temporal interferometry SAR approaches integrated with geotechnical analysis. Remote Sens. Environ. 2017, 188, 51–72. [Google Scholar] [CrossRef]
- Shi, X.; Zhang, L.; Liao, M.; Balz, T. Deformation monitoring of slow-moving landslide with L-and C-band SAR interferometry. Remote Sens. Lett. 2014, 2014 5, 951–960. [Google Scholar] [CrossRef]
- Strozzi, T.; Farina, P.; Corsini, A.; Ambrosi, C.; Thüring, M.; Zilger, J.; Wiesmann, A.; Wegmüller, U.; Werner, C. Survey and monitoring of landslide displacements by means of L-band satellite SAR interferometry. Landslides 2005, 2, 193–201. [Google Scholar] [CrossRef]
- Boni, R.; Bordoni, M.; Colombo, A.; Lanteri, L.; Meisina, C. Landslide state of activity maps by combining multi-temporal A-DInSAR (LAMBDA). Remote Sens. Environ. 2018, 217, 172–190. [Google Scholar] [CrossRef]
- Rosi, A.; Tofani, V.; Tanteri, L.; Tacconi Stefanelli, C.; Agostini, A.; Catani, F.; Casagli, N. The new landslide inventory of Tuscany (Italy) updated with PS-InSAR: Geomorphological features and landslide distribution. Landslides 2018, 15, 5–19. [Google Scholar] [CrossRef]
- Strozzi, T.; Klimeš, J.; Frey, H.; Caduff, R.; Huggel, C.; Wegmüller, U.; Rapre, A.C. Satellite SAR interferometry for the improved assessment of the state of activity of landslides: A case study from the Cordilleras of Peru. Remote Sens. Environ. 2018, 217, 111–125. [Google Scholar] [CrossRef]
- Konishi, T.; Suga, Y. Landslide detection using COSMO-SkyMed images: A case study of a landslide event on Kii Peninsula, Japan. Eur. J. Remote Sens. 2018, 51, 205–221. [Google Scholar] [CrossRef]
- IASC Multi-Sector Initial Rapid Assessment Guidance. Available online: https://www.humanitarianresponse.info/en/programme-cycle/space/document/multi-sector-initial-rapid-assessment-guidance-revision-july-2015 (accessed on 16 October 2018).
- Bamler, R.; Hartl, P. Synthetic Aperture Radar Interferometry. Inverse Probl. 1998, 14, R1. [Google Scholar] [CrossRef]
- Just, D.; Bamler, R. Phase Statistics of interferograms with applications to synthetic aperture radar. Appl. Opt. 1994, 33, 4361–4368. [Google Scholar] [CrossRef]
- Li, Z.; Wright, T.; Hooper, A.; Crippa, P.; Gonzalez, P.; Walters, R.; Elliott, J.; Ebmeier, S.; Hatton, E.; Parsons, B. Towards InSAR everywhere, all the time with Sentinel-1. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 763–766. [Google Scholar] [CrossRef]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. 1992, 30, 950–959. [Google Scholar] [CrossRef]
- Fielding, E.J.; Talebian, M.; Rosen, P.A.; Nazari, H.; Jackson, J.A.; Ghorashi, M.; Walker, R. Surface ruptures and building damage of the 2003 Bam, Iran, earthquake mapped by satellite synthetic aperture radar interferometric correlation. J. Geophys. Res. Solid Earth 2005, 110. [Google Scholar] [CrossRef]
- Nico, G.; Pappalepore, M.; Pasquariello, G.; Refice, A.; Samarelli, S. Comparison of SAR amplitude vs. coherence flood detection methods—A GIS application. Int. J. Remote Sens. 2000, 21, 1619–1631. [Google Scholar] [CrossRef]
- Vajedian, S.; Motagh, M.; Mousavi, Z.; Motaghi, K.; Fielding, E.; Akbari, B.; Wetzel, H.U.; Darabi, A. Coseismic Deformation Field of the Mw 7.3 12 November 2017 Sarpol-e Zahab (Iran) Earthquake: A Decoupling Horizon in the Northern Zagros Mountains Inferred from InSAR Observations. Remote Sens. 2018, 10, 1589. [Google Scholar] [CrossRef]
- Yonezawa, C.; Takeuchi, S. Decorrelation of SAR data by urban damages caused by the 1995 Hyogoken-nanbu earthquake. Int. J. Remote Sens. 2001, 22, 1585–1600. [Google Scholar] [CrossRef]
- Yun, S.H.; Fielding, E.J.; Webb, F.H.; Simons, M. Damage Proxy Map from Interferometric Synthetic Aperture Radar Coherence. U.S. Patent 9,207,318, 20 December 2012. [Google Scholar]
- Coltuc, D.; Bolon, P.; Chassery, J.-M. Exact Histogram Specification. IEEE Trans. Image Process. 2006, 15, 1143–1152. [Google Scholar] [CrossRef] [PubMed]
- Kargel, J.S.; Leonard, G.J.; Shugar, D.H.; Haritashya, U.K.; Bevington, A.; Fielding, E.J.; Fujita, K.; Geertsema, M.; Miles, E.S.; Steiner, J.; et al. Geomorphic and geologic controls of geohazards induced by Nepal’s 2015 Gorkha earthquake. Science 2016, 351, aac8353. [Google Scholar] [CrossRef] [PubMed]
- Deledalle, C.A.; Denis, L.; Tupin, F.; Reigber, A.; Jäger, M. NL-SAR: A unified nonlocal framework for resolution-preserving (Pol)(In) SAR denoising. IEEE Trans. Geosci. Remote 2015, 53, 2021–2038. [Google Scholar] [CrossRef]
- Feretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A new algorithm for processing interferometric data-stacks: SqueeSAR. IEEE Trans. Geosci. Remote 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Spaans, K.; Hooper, A. InSAR processing for volcano monitoring and other near-real time applications. J. Geophys. Res. Solid Earth 2016, 121, 2947–2960. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Begueria, S. Validation and Evaluation of Predictive Models in Hazard Assessment and Risk Management. Nat. Hazards 2006, 37, 315–329. [Google Scholar] [CrossRef]
- Franceschetti, G.; Marino, R.; Migliaccio, M.; Riccio, D. SAR simulation of three-dimensional scenes. SAR Data Processing for Remote Sensing. Int. Soc. Opt. Photonics 1994, 2316, 192–202. [Google Scholar]
- Frey, O.; Santoro, M.; Werner, C.; Wegmuller, U. DEM-based SAR pixel area estimation for enhanced geocoding refinement and radiometric normalization. In Proceedings of the FRINGE 2011, Frascati, Italy, 19–23 September 2011. [Google Scholar]
- Reichenbach, P.; Rossi, M.; Malamud, B.; Mihir, M.; Guzzetti, F. A review of statistically-based landslide susceptibility models. Earth Sci. Rev. 2018, 180, 60–91. [Google Scholar] [CrossRef]
- Rees, W.G. Technical note: Simple masks for shadowing and highlighting in SAR images. Int. J. Remote Sens. 2000, 21, 2145–2152. [Google Scholar] [CrossRef]
- Czuchlewski, K.R.; Weissel, J.K.; Kim, Y. Polarimetric synthetic aperture radar study of the Tsaoling landslide generated by the 1999 Chi-Chi earthquake, Taiwan. J. Geophys. Res. Earth 2003, 108. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F. New improved version of the Generic Mapping Tools released. EOS Trans. Am. Geophys. Union 1998, 76, 579. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
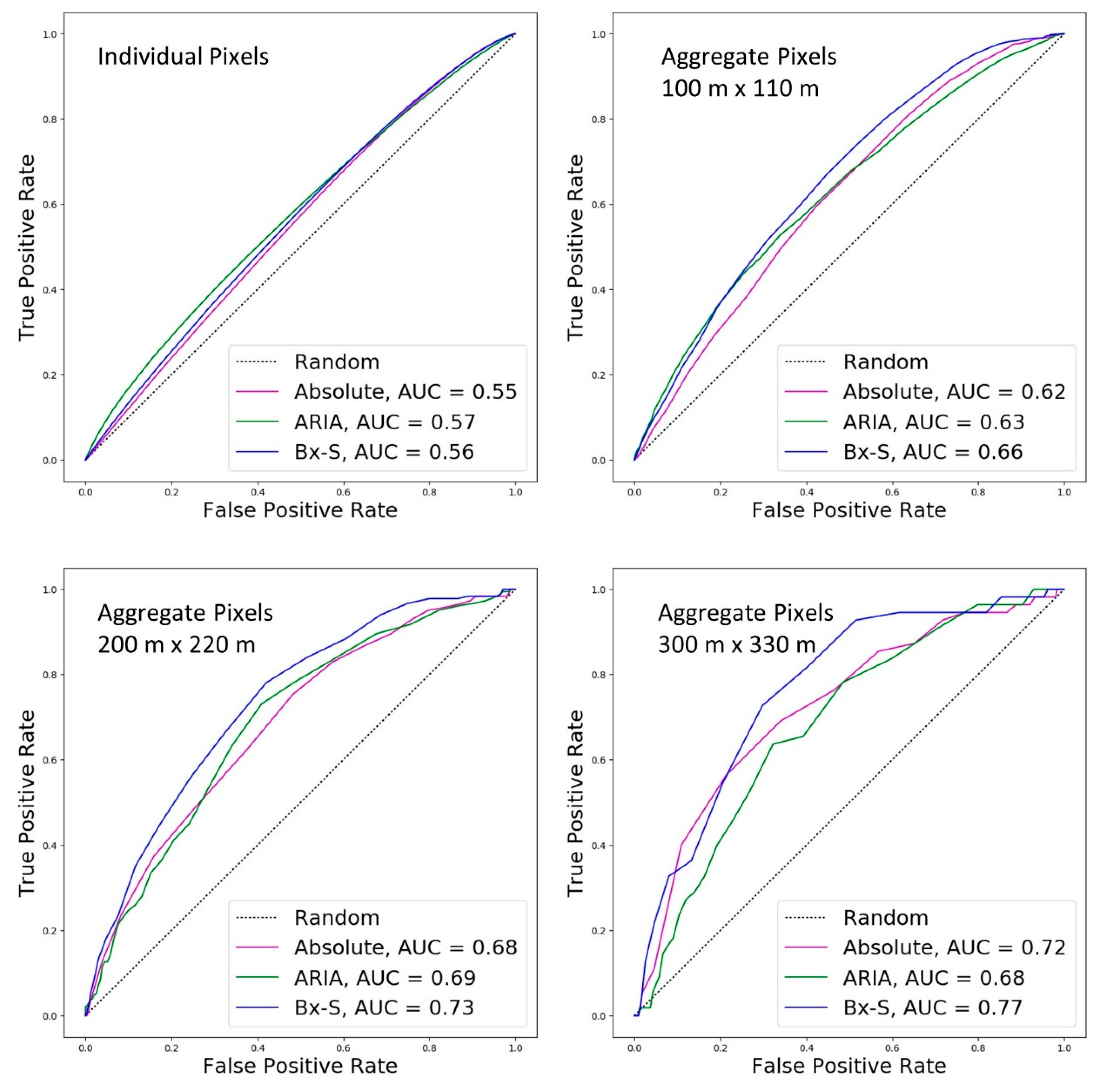
| 3 × 3 | 5 × 5 | 20 × 20 | |
|---|---|---|---|
| Absolute | 0.68 | 0.68 | 0.66 |
| ARIA | 0.69 | 0.69 | 0.64 |
| Bx-S | 0.73 | 0.73 | 0.73 |
| 10% | 20% | 30% | 40% | 50% | 60% | |
|---|---|---|---|---|---|---|
| Absolute | 0.65 | 0.67 | 0.68 | 0.69 | 0.68 | 0.69 |
| ARIA | 0.65 | 0.65 | 0.67 | 0.68 | 0.69 | 0.69 |
| Bx-S | 0.67 | 0.70 | 0.72 | 0.73 | 0.73 | 0.75 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burrows, K.; Walters, R.J.; Milledge, D.; Spaans, K.; Densmore, A.L. A New Method for Large-Scale Landslide Classification from Satellite Radar. Remote Sens. 2019, 11, 237. https://doi.org/10.3390/rs11030237
Burrows K, Walters RJ, Milledge D, Spaans K, Densmore AL. A New Method for Large-Scale Landslide Classification from Satellite Radar. Remote Sensing. 2019; 11(3):237. https://doi.org/10.3390/rs11030237
Chicago/Turabian StyleBurrows, Katy, Richard J. Walters, David Milledge, Karsten Spaans, and Alexander L. Densmore. 2019. "A New Method for Large-Scale Landslide Classification from Satellite Radar" Remote Sensing 11, no. 3: 237. https://doi.org/10.3390/rs11030237
APA StyleBurrows, K., Walters, R. J., Milledge, D., Spaans, K., & Densmore, A. L. (2019). A New Method for Large-Scale Landslide Classification from Satellite Radar. Remote Sensing, 11(3), 237. https://doi.org/10.3390/rs11030237