Abstract
The Global Navigation Satellite System (GNSS) ultra-rapid precise orbits are crucial for global and wide-area real-time high-precision applications. The solar radiation pressure (SRP) model is an important factor in precise orbit determination. The real-time orbit determination is generally less accurate than the post-processed one and may amplify the instability and mismodeling of SRP models. Also, the impact of different SRP models on multi-GNSS real-time predicted orbits demands investigations. We analyzed the impact of the ECOM 1 and ECOM 2 models on multi-GNSS ultra-rapid orbit determination in terms of ambiguity resolution performance, real-time predicted orbit overlap precision, and satellite laser ranging (SLR) validation. The multi-GNSS observed orbital arc and predicted orbital arcs of 1, 3, 6, and 24 h are compared. The simulated real-time experiment shows that for GLONASS and Galileo ultra-rapid orbits, compared to ECOM 1, ECOM 2 increased the ambiguity fixing rate to 89.3% and 83.1%, respectively, and improves the predicted orbit accuracy by 9.2% and 27.7%, respectively. For GPS ultra-rapid orbits, ECOM 2 obtains a similar ambiguity fixing rate as ECOM 1 but slightly better orbit overlap precision. For BDS GEO ultra-rapid orbits, ECOM 2 obtains better overlap precision and SLR residuals, while for BDS IGSO and MEO ultra-rapid orbits, ECOM 1 obtains better orbit overlap precision and SLR residuals.
1. Introduction
The International GNSS (Global Navigation Satellite System) Service (IGS) officially began providing services in 1994. Since 2005, its name has changed from “International GPS Service” to “International GNSS Service”. The GLONASS system is integrated into the IGS daily processing operation to provide precise orbit, atmosphere, earth rotation parameters like those of GPS [1]. In 2011, the IGS launched the Multi-GNSS Experiment and Pilot Project (MGEX) with global stations capable of tracking Galileo and BDS signals [2].
To meet the different needs of timeliness, IGS provides the final, rapid, and ultra-rapid orbit products. The real-time precise orbit is a prerequisite for global and wide-area precise positioning of decimeter to centimeter level. For real-time users, IGS has provided the ultra-rapid (IGU) orbits since 2000 [3,4]. Currently, the IGU orbit updates every 6 h, and covers 24 h of observed orbit arc and 24 h predicted orbit arc. The GPS orbital accuracy of the observed part is about 3 cm, and that of prediction (real-time) is about 5 cm. The IGS real-time service (RTS) orbits have a 3D RMS of 5 cm for GPS and 13 cm for GLONASS compared with the IGS final products [5].
For multi-GNSS real-time applications, the German Research Centre for Geosciences (GFZ) has provided multi-GNSS ultra-rapid orbit products (GBU), including GPS, GLONASS, Galileo, BDS, and QZSS satellites, with a 3-h update rate since November 2015 [6,7]. The hourly updated ultra-rapid orbit products of the four global constellations satellites (GPS, GLONASS, Galileo, and BDS) were reported in 2017 [8]. The hourly updated multi-GNSS ultra-rapid orbit and its impact on the precise point positioning were also analyzed [9].
Apart from the observation model and the tracking geometry related to the number and distribution of ground stations, the dynamic model is the main factor that limits the quality of the orbit products, especially the predicted orbits for real-time users. Currently, the solar radiation pressure (SRP) is among the perturbations most difficult to model and has the greatest impact on the GNSS orbit quality. A series of effective analytical SRP models have been developed based on the modeling of the component structure and optical properties of the GNSS satellite surface (reflection, diffusion, and absorption), as well as the satellite attitude. The Cannonball model [10], the T10, T20, T30 series models [11,12], the Box-Wing model [13], and the UCL model [14,15] are among the widely used analytical SRP models. The analytical SRP model has clear physical meaning and can calculate the force on the satellite without in-orbit data. Therefore, it plays an important role in orbit determination of new satellites. Because the analytical model can clearly represent the actual force, it can obtain accurate orbit prediction. However, because the analytical model depends on the satellite attributes, any satellite structure or optical property errors, or ignoring some forces, can cause large model errors. A semi-analytical adjustable Box-Wing SRP model with adjustable empirical parameters was proposed [16], which has the practical physical meaning of analytical models and can also obtain high-precision orbit determination like empirical models. Considering that the Galileo cuboid shape causes great variation of the satellite body area irradiated by the sun, an a priori SRP model was established for Galileo satellites, which reduced the peak orbital radial error from 20 cm to 5 cm [17].
The empirical SRP models are developed by fitting many long-term in-orbit observation data. It can effectively reflect the SRP force and needs no accurate information, such as the structure and optical properties of navigation satellites. However, the empirical model has terms with no actual physical meaning, and the proper modeling needs accumulated satellite measurements over many years. The empirical SRP models mainly include the Colombo model [18], the CODE ECOM series model [19,20,21], and the JPL GSPM series model [22]. Among them, the CODE ECOM model is widely used by the IGS analysis centers. The ECOM model contains nine parameters, which are constant and periodic parameters in three orthogonal directions [19,20]. CODE then developed the ECOM 5-parameter model [20] from the ECOM 9-parameter model [19], which is called the ECOM 1 model. CODE also developed the ECOM 2 model [21], which considers not only the SRP on solar panels but also the SRP variation on the satellite body. The ECOM 2 model can improve the orbit determination accuracy of cuboid satellites, especially in the period when the solar elevation is low with respect to the satellite orbital plane. Other perturbations from earth’s albedo radiation and antenna thrust have accurate models for GPS and GLONASS satellites [23] and can be modeled for the new GNSS systems with the information of satellite geometry, material optical properties, and antenna transmission power.
Currently, only a few IGS analysis centers have released multi-GNSS real-time orbit products. The impact of solar radiation pressure models on multi-GNSS real-time orbit determination needs to be studied. The parameter estimation of real-time precise orbit determination includes batch processing and filter sequential processing [24,25,26]. We focus on ultra-rapid orbit solutions using batch processing. We study the multi-GNSS ultra-rapid orbit determination with ambiguity resolution and discuss the impact of the different ECOM solar radiation pressure models on real-time orbit accuracy.
In the following sections, we first present the ECOM SRP models and the processing strategies in multi-GNSS ultra-rapid orbit determination. Then we analyze the impact of different ECOM models on ambiguity resolution and real-time predicted orbit accuracy in terms of overlap discontinuities and satellite laser ranging. Finally, the comparison and selection of proper ECOM models for different satellites are discussed.
2. Models and Methods
The SRP models of new systems, such as Galileo and BDS, generally adopt the existing models of GPS and GLONASS, which need further optimization. At present, the ECOM SRP model is widely used by IGS analysis centers. This section first describes the ECOM models series and then presents the experiment design and processing strategy of multi-GNSS ultra-rapid precise orbit determination.
2.1. ECOM Models
The total acceleration on a satellite due to solar radiation pressure can be written as
where is the selectable a priori model, and is the satellite’s argument of latitude. The ECOM model decomposes the SRP accelerations into three orthogonal directions. The vector is the unit vector in the direction from satellite to the sun, points along the satellite solar panels axis, and completes the right-hand orthogonal system [19,20].
In the original ECOM, the functions , and are represented as Fourier series truncated after the once-per-revolution (1pr) terms, using the satellite’s argument of latitude as angular argument [19], as shown in
The reduced ECOM model [20], i.e., the ECOM 1 model, is often used in practice,
Due to deficiencies of ECOM 1 in modeling SRP of GLONASS satellites, CODE developed the ECOM 2 model [21]. In the ECOM 2 model, the truncated Fourier series adopts the angular argument , where is the solar argument of latitude in the satellite orbital plane. Compared to the ECOM 1 model, the ECOM 2 model adds the 2pr and 4pr terms in the direction shown in
The main difference of ECOM 2 from the ECOM 1 model is that it accurately models not only the SRP on solar panels but also the SRP changes on the satellite body. This leads to improved orbit accuracy of satellites with elongated bodies, such as GLONASS, especially in the period when the elevation angle of the sun relative to the orbit plane is low. On the other hand, due to the increased estimation parameters, orbit solutions with ECOM 2 might be less stable and more sensitive to other modeling errors such as satellite attitude, which leads to a significant degradation for some GLONASS satellites [27]. The real-time orbit determination is generally less accurate than the post-processed orbit determination, which may amplify the instability and mismodeling of SRP models. Therefore, the impact of different ECOM models on real-time orbits demands further investigations.
The ECOM models are generally developed for the yaw-steering attitude mode. GPS, GLONASS, and Galileo navigation satellites adopt the yaw-steering attitude mode, while BDS GEO (Geostationary Earth Orbit) satellites adopt the orbit-normal attitude. BDS-2 IGSO (Inclined Geosynchronous Satellite Orbit) and MEO (Medium Earth Orbit) satellites adopt the yaw-steering attitude most of the time, but when the solar elevation angle is less than 4 degrees and the orbital angle approaches 90 degrees, the satellites transition from the yaw-steering to the orbit-normal attitude [28,29]. For orbit-normal attitude satellites, the ECOM vector is in the direction from satellite to the sun; the ECOM along the solar panel axis is then perpendicular to the satellite orbital plane, but usually not perpendicular to ; and ECOM is the cross-product of and . Current modified ECOM axis direction for orbit-normal attitude mainly include the modified ECOM 1 model with the virtual axis () pointing along the direction of the cross-product of and [30], and the modified ECOM 1 model with the modified axis () pointing along the direction of the cross-product of and [31]. For orbit-normal satellites, the geometric correction, such as the satellite antenna phase center and phase windup, should adopt the actual orbit-normal attitude.
2.2. Experiment Methods
The well-distributed global stations from IGS/MGEX and regional stations in China were used in the experiment. The experiment covered DOY 75 to DOY 115 in 2016. The ultra-rapid orbit determination experiment was carried out in simulated real-time mode using the ECOM 1 model [19,20] and ECOM 2 model [21], respectively. The GNSS observation data of all stations were downloaded in real-time and saved as hourly observation files for the experiment period. The ultra-rapid orbit determination adopted the batch processing mode. The accessible hourly observation files were merged into one-day arcs, and the ultra-rapid orbit solution of one-day arc length moved forward with a sliding window of 1 h. The predicted orbit arcs of 1, 3, 6, and 24 h were evaluated by comparison with the corresponding observed orbit arc from the next daily solution, as well as the satellite laser ranging (SLR) observations. Figure 1 shows the distribution of real-time GNSS stations used in this paper.
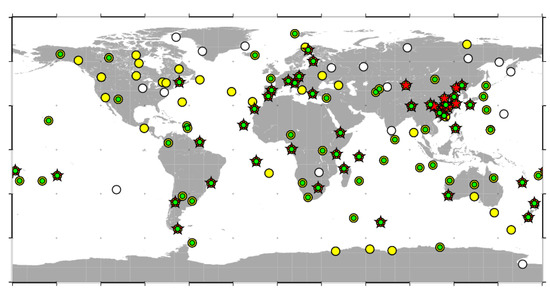
Figure 1.
GNSS station distribution in the experiment. There are 140 GPS stations (white circles), 120 GLONASS stations (yellow circles), 78 Galileo stations (green circles), and 78 BDS stations (red stars).
The Position And Navigation Data Analyst (PANDA) software [32,33] was adapted for this study. The undifferenced ionospheric-free combinations of dual-frequency pseudo-range and carrier phase observations were used to eliminate the first-order ionospheric delays. In the combined multi-GNSS processing, the pseudo-range inter-system biases (ISBs) with respect to GPS were estimated as a daily constant for Galileo and BDS, respectively; the pseudo-range inter-frequency biases (IFBs) with respect to GPS were estimated as a daily constant for each GLONASS satellite. The orbit determination strategy was consistent with the IGS Analysis Center GFZ [34]. Table 1 gives the important processing strategies about the observation model and force model.

Table 1.
Observation and force models in multi-GNSS ultra-rapid orbit determination.
The double-differenced ambiguity resolution method for code division multiple access (CDMA) systems, including GPS, Galileo, and BDS, was consistent with Ge et al. [46]. The double-differenced (DD) wide-lane ambiguities derived from the Hatch-Melbourne-Wübbena (HMW) combination [47,48,49] and the narrow-lane ambiguities derived from the adjustment were sequentially fixed to integers. As the real-time carrier phase ambiguity parameters are generally less accurate than the post-processed ones, stringent criteria were adopted in the experiment. Independent baselines were selected with a length shorter than 3000 km. In the double-differenced ambiguity resolution, only the undifferenced ambiguity arcs of more than 40 min and the double-differenced common-view arcs more than 30 min were considered. The double-differenced ambiguity was resolved only when the fractional cycles of wide-lane and narrow-lane ambiguities were both less than 0.15 cycles [50].
The BDS satellite-induced elevation-dependent pseudo-range variations were corrected in raw observables using the third-order polynomial correction model [51]. For the BDS GEO satellites, there are strong correlations among orbital parameters, SRP parameters, satellite clocks, and ambiguity parameters due to the small variation of geometric observation structure. Considering the poor observation geometry of BDS GEO satellites, the ambiguity parameters are difficult to estimate accurately, and the large orbit error, especially in the along-track direction, is absorbed by the ambiguity parameters in adjustment [52]. Therefore, BDS GEO satellites were excluded from the ambiguity resolution. The frequency division multiple access (FDMA) adopted in GLONASS introduces inter-frequency bias (IFB) at the receiver and different wavelengths, which cannot be eliminated by differences between satellites. Considering the linear relation between phase IFB and the frequency number, Liu et al. [53] proposed a double-differenced ionospheric-free ambiguity resolution method for GLONASS satellites with different frequencies by correcting the carrier phase IFB, which can be applied to baselines with lengths up to several thousand kilometers and with different types of receivers in a global network [54,55]. We adopted this method in the experiment to resolve the double-differenced ambiguities for GLONASS.
3. Results
In this section, we first assess the ambiguity resolution performance for different SRP models in the experiment. Then we evaluate the precision of real-time predicted orbits based on orbit overlap differences with post-processed observation arcs. Finally, we present the accuracy of microwave-based predicted orbits by satellite laser ranging validation.
3.1. Ambiguity Resolution Performance
Ambiguity resolution can significantly improve the GNSS orbit determination. To assess the impact of different SRP models, we first analyze the ambiguity fixing rate of the baselines of various lengths for GPS, GLONASS, Galileo, and BDS, respectively. A higher fixing rate indicates a tighter distribution of double-differenced ambiguities around integers and a better orbit solution.
Table 2 gives the average number of GPS independent double-differenced ambiguities and the fixing rates for different baseline lengths. It shows that the relation between GPS ambiguity fixing rate and the baseline length was not obvious, which indicates that GPS orbit precision was high enough for ambiguity resolution at long baselines. Overall, about 95% of the independent ambiguities were fixed, which was consistent with previous studies [46]. The fixing rate is almost the same for ECOM 1 and ECOM 2, which indicates that the two SRP models can achieve similar and high GPS orbit precision.
Table 2.
Number of GPS independent double-differenced (DD)-ambiguities and fixing rates for different baselines.
Table 3 gives the number of GLONASS independent double-differenced ambiguities and the fixing rate for different baseline lengths. Considering the relatively lower precision of real-time solution and the short wavelength (about 5.3 cm) of GLONASS ionospheric-free ambiguities, the fixing rate for baselines shorter than 1500 km was analyzed. It shows that the GLONASS fixing rate decreased gradually with the baseline length, which indicates that the geometric errors biased the ambiguity parameters, especially for the long baselines. The longer the baseline is, the better ECOM 2 performs compared to ECOM 1. Overall, the fixing rate is 86.5% and 89.3% for ECOM 1 and ECOM 2, respectively, which implies that ECOM 2 performs better than ECOM 1 for GLONASS ultra-rapid orbits.
Table 3.
Number of GLONASS independent DD-ambiguities and fixing rates for different baselines.
Table 4 gives the average number of Galileo independent double-differenced ambiguities and the fixing rate for different baseline lengths. The relation between Galileo fixing rate and the baseline length is obvious. The longer the baseline is, the lower the fixing rate. It indicates that the Galileo orbit accuracy was not high enough, and the geometric errors largely biased the ambiguity parameter. The longer the baseline, the better the ECOM 2 performs compared to ECOM 1. Overall, the fixing rate is 80.0% and 83.1% for ECOM 1 and ECOM 2, respectively, which implies that ECOM 2 performs better than ECOM 1 for Galileo ultra-rapid orbits.
Table 4.
Number of Galileo independent DD-ambiguities and fixing rates for different baselines.
Table 5 gives the average number of BDS independent double-differenced ambiguities and the fixing rate for different baseline lengths. It shows that the BDS fixing rate decreased steeply with the baseline length. It indicates that BDS orbit accuracy was not high enough, and geometric errors hindered the ambiguity resolution, especially for longer baselines. Considering the relatively small number of independent ambiguities, the difference in fixing rate between ECOM 1 and ECOM 2 is not obvious. Overall, the fixing rate is 76.3% and 77.9% for ECOM 1 and ECOM 2, respectively, which is slightly lower than that of Galileo.
Table 5.
Number of BDS independent DD-ambiguities and fixing rates for different baselines.
The ambiguity resolution comparison shows that for GLONASS and Galileo satellites, ECOM 2 achieves higher fixing rates than ECOM 1; and for GPS and BDS IGSO/MEO satellites, ECOM 1 and ECOM 2 achieved similar fixing rates. The different ambiguity resolution performance of ECOM 1 and ECOM 2 is also reflected in the following orbit overlap precision comparison and satellite laser ranging validation.
3.2. Orbit Overlap Precision
We first assess the precision of ultra-rapid orbits using the difference of satellite positions in the overlap arcs between two orbit solutions. The current IGS GLONASS final orbits are the combination of mainly float solution orbits from the analysis centers and cannot be used to evaluate the fixed solution orbits accurately. The IGS analysis center CODE enables fixing of all GLONASS ambiguities for baselines shorter than 200 km, but for longer baselines (below 2000 km), only the ambiguities between satellites with the same frequency are fixed [56]. In contrast, the GLONASS ambiguity resolution method in this research can fix the ambiguities with no restrictions on frequency and receiver type for long baselines [53]. For Galileo and BDS, the orbit products of different IGS MGEX analysis centers show some inconsistencies, indicating that it is still difficult to achieve the same accuracy level as GPS and GLONASS. Moreover, for the new GNSS, the lack of enough stations with even global distribution has a negative impact on the IGS MGEX orbit products, especially for BDS. Well-distributed BDS stations in the Asia-Pacific region are still lacking, which can degrade the IGS MGEX orbit products, such as CODE and GFZ products.
To evaluate the orbit precision more objectively, Griffiths and Ray [57] show that the discontinuities in overlap arcs is a better metric. In addition, the overlap arc difference can effectively avoid the biases in inter-AC comparison caused by different strategies and models, such as satellite attitude, antenna phase center, and ambiguity resolution strategies. Thus, the single factor of the solar radiation pressure model on orbits can be analyzed more properly. Therefore, we used this indicator of overlap comparison to evaluate the orbits. Because the overlap difference is calculated by two adjacent orbits, the precision of each orbit is small by about sqrt(2). The predicted orbit arc of the previous daily solution was compared with that of the observed arc of the next daily solution. The predicted orbit arcs of 0 h (00:00 point), 1, 3, 6, and 24 h were analyzed, respectively. The seven-parameter Helmert transformation was used in orbit comparison to remove possible systematic differences between orbits.
The mean RMS of overlap differences in the along-track, cross-track, and radial direction for GPS satellites are shown in Figure 2. ECOM 2 generally obtained higher precision than ECOM 1 for GPS predicted orbits. The GPS predicted orbit precision degraded gradually with the predicted arc length. For the predicted orbit arc of 1 h, ECOM 1 obtained the overlap precision of 3.3 cm, 2.1 cm and 2.6 cm in the along-track, cross-track and radial direction, respectively; ECOM 2 obtained the overlap precision of 3.0, 2.0, and 2.2 cm in the along-track, cross-track, and radial direction, respectively, which was a slight improvement of 9.1%, 4.8%, and 15.4% compared with ECOM 1, respectively.
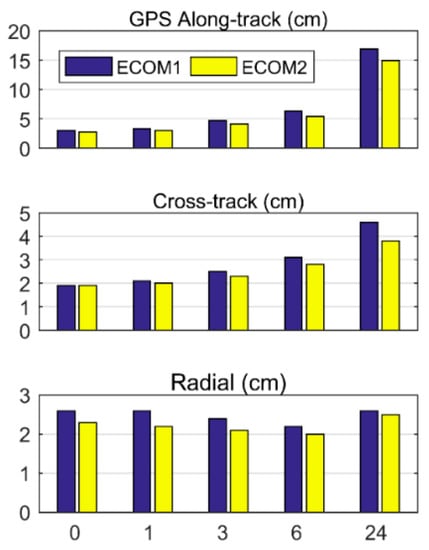
Figure 2.
GPS overlap precision for various predicted orbit arcs. The predicted orbit arcs include 0 h (00:00 point), 1, 3, 6, and 24 h. The blue and yellow bars represent the RMS for ECOM 1 and ECOM 2, respectively.
The mean RMS of overlap differences in the along-track, cross-track, and radial direction for GLONASS satellites are shown in Figure 3. ECOM 2 model generally obtained higher 3D precision than the ECOM 1 model for GLONASS predicted orbits. The GLONASS predicted orbit precision degraded gradually with the predicted arc length. For the predicted orbit arc of 1 h, ECOM 1 model obtained the overlap precision of 7.0, 5.0, and 2.7 cm in the along-track, cross-track, and radial direction, respectively; ECOM 2 model obtained the overlap precision of 6.8, 4.3, and 2.5 cm in the along-track, cross-track, and radial direction, respectively, which was a slight improvement of 2.9%, 14.0%, and 7.4% compared with ECOM 1, respectively. The 1-h predicted GLONASS orbits using ECOM 2 obtained the along-track and cross-track precision worse by a factor of about two compared to GPS, and the radial precision close to GPS, which is the main component of the signal-in-space range error.
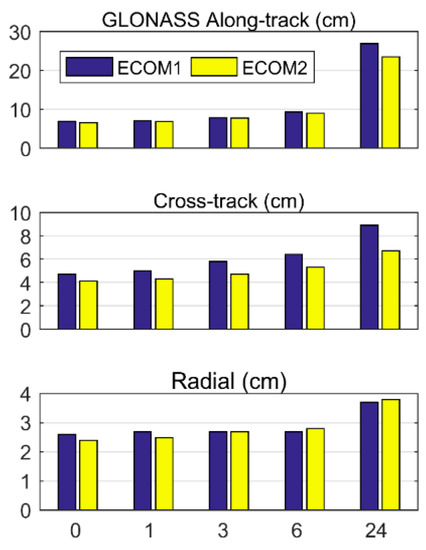
Figure 3.
GLONASS overlap precision for various predicted orbit arcs. The predicted orbit arcs include 0 h (00:00 point), 1, 3, 6, and 24 h. The blue and yellow bars represent the RMS for ECOM 1 and ECOM 2, respectively.
The mean RMS of overlap differences in the along-track, cross-track, and radial direction for Galileo satellites are shown in Figure 4. The ECOM 2 model generally obtained higher precision than the ECOM 1 model for Galileo predicted orbits. The Galileo predicted orbit precision degraded rapidly with the predicted arc length, especially for the along-track direction, which implies certain mismodeling in observation or force models. For the predicted orbit arc of 1 h, the ECOM 1 model obtained the overlap precision of 11.7, 8.5, and 7.2 cm in the along-track, cross-track, and radial direction, respectively; ECOM 2 model obtained the overlap precision of 8.8, 6.2, and 5.9 cm in the along-track, cross-track, and radial direction, respectively, which was a significant improvement of 24.8%, 27.1%, and 18.1% compared with ECOM 1, respectively. The 1-h predicted Galileo orbits using ECOM 2 were worse by a factor of about three compared to GPS.
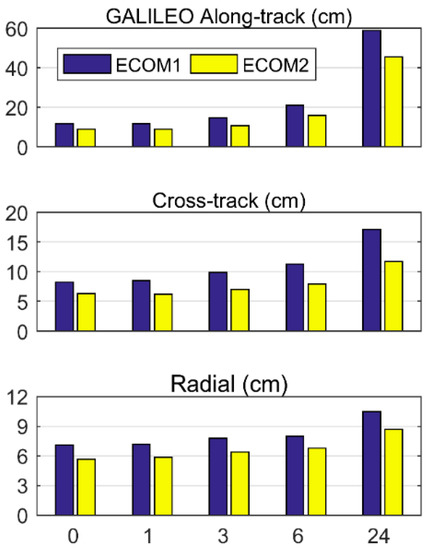
Figure 4.
Galileo overlap precision for various predicted orbit arcs. The predicted orbit arcs include 0 h (00:00 point), 1, 3, 6, and 24 h. The blue and yellow bars represent the RMS for ECOM 1 and ECOM 2, respectively.
The mean RMS of overlap differences for BDS-2 IGSO satellites is shown in Figure 5. The ECOM 1 model generally obtained higher precision than ECOM 2 for BDS-2 IGSO predicted orbits. The BDS-2 IGSO predicted orbit precision degraded rapidly with the predicted arc length, especially for the along-track direction, which also implies certain mismodeling in the observation or force models. For the predicted orbit arc of 1 h, the ECOM 1 model obtained the overlap precision of 28.4 cm and 18.4 cm in the 3D and radial components, respectively; ECOM 2 model obtained the overlap precision of 32.9 cm and 24.7 cm in the 3D and radial components, respectively, which was a significant degradation of 15.8% and 34.2% compared to ECOM 1, respectively. The 1-h predicted BDS-2 IGSO orbits using ECOM 1 were worse by a factor of about seven compared with GPS.
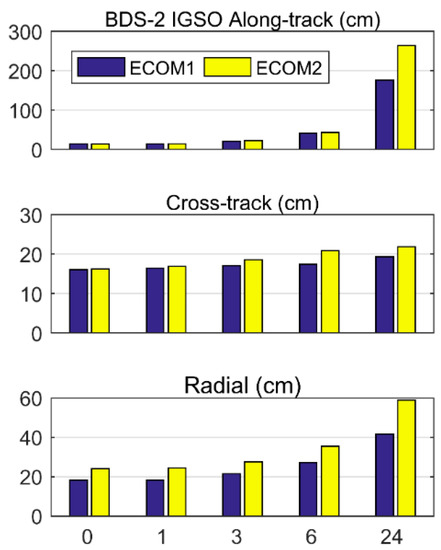
Figure 5.
BDS-2 IGSO overlap precision for various predicted orbit arcs. The predicted orbit arcs include 0 h (00:00 point), 1, 3, 6, and 24 h. The blue and yellow bars represent the RMS for ECOM 1 and ECOM 2, respectively.
The mean RMS of overlap differences for BDS-2 MEO satellites are shown in Figure 6. The ECOM 1 model generally obtained higher precision than the ECOM 2 model for BDS-2 MEO predicted orbits. The BDS-2 MEO predicted orbit precision degraded rapidly with the predicted arc length, especially for the along-track direction, which also implies certain mismodeling in observation or force models. For the predicted orbit arc of 1 h, the ECOM 1 model obtained the overlap precision of 15.6 cm and 5.7 cm in the 3D and radial components, respectively; ECOM 2 model obtained the overlap precision of 16.1 cm and 6.6 cm in the 3D and radial components, respectively, which was a degradation of 3.2% and 15.8% compared with ECOM 1, respectively. The 1-h predicted BDS-2 MEO orbits using ECOM 1 were similar to Galileo, and worse by a factor of about three compared with GPS in the radial direction.
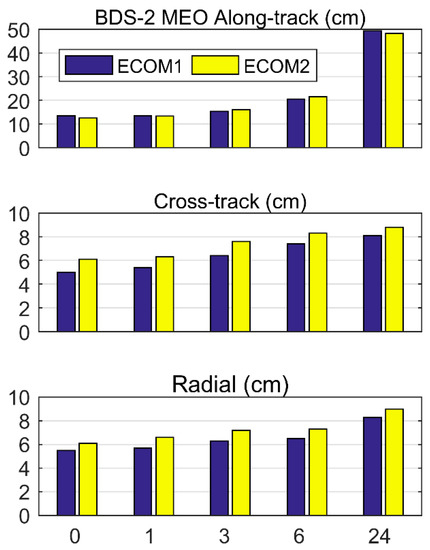
Figure 6.
BDS-2 MEO overlap precision for various predicted orbit arcs. The predicted orbit arcs include 0 h (00:00 point), 1, 3, 6, and 24 h. The blue and yellow bars represent the RMS for ECOM 1 and ECOM 2, respectively.
For the BDS GEO satellites in the experiment, the ECOM 2 model generally obtained better overlap precision than the ECOM 1 model in the 3D and radial components. For the predicted orbit arc of 24 h, the ECOM 1 and ECOM 2 models obtained the radial overlap precision of 282.4 cm and 220.6 cm, respectively, and ECOM 2 showed an improvement of 21.9% compared with ECOM 1. For BDS GEO satellites, the SRP model should accurately describe the SRP force while reducing the correlation between parameters, which needs further SLR validation.
The multi-GNSS ultra-rapid orbits in the experiment obtained comparable precision with the current predicted orbit products [5,6,7,8,9]. The orbit overlap comparison shows that for GPS, GLONASS, Galileo, and BDS GEO satellites, the ECOM 2 model generally achieved better orbital prediction than the ECOM-1 model, while for BDS IGSO and MEO satellites, the ECOM 1 model generally achieved better orbital prediction than the ECOM 2 model.
3.3. Satellite Laser Ranging Validation
Satellite laser ranging (SLR) observables are usually used as external validation to evaluate GNSS satellite orbit quality. The SLR residuals, i.e., the differences between the SLR observables and the range calculated from microwave-based satellite positions, including the observed and predicted orbit arc, mainly show the GNSS orbit accuracy in the radial direction. In the experiment, the GLONASS, Galileo, and BDS GEO C01, IGSO C08, and C10, MEO C11 satellites equipped with laser retroreflector arrays were observed by the SLR stations from the International Laser Ranging Service (ILRS) [58]. The SLR station coordinates were fixed to the a priori reference frame, and the station displacements were corrected consistently with the microwave-based solutions. The tropospheric delays, relativistic effects, and the Laser Retro-Reflector Arrays offsets with respect to the satellites’ center of mass were corrected in the SLR observables. Outliers exceeding 0.6 m were excluded for GLONASS, Galileo, and BDS MEO satellites, and those exceeding 3.0 m and 10.0 m were excluded for BDS IGSO and GEO satellites, respectively. This outlier check excluded approximately 2.5%, 3.7%, 9.3%, and 1.2% of the data points for GLONASS, Galileo, BDS MEO, and BDS IGSO satellites, respectively, and no data points were excluded for BDS GEO satellites. After the removal of outliers, the number of normal points for observed orbit arcs of 24 h (predicted 0 h) and various predicted orbit arcs is shown in Table 6.
Table 6.
Number of available normal points for observed and various predicted orbit arcs.
The RMS of the SLR residuals for the observed and predicted orbits are given in Figure 7. The predicted orbit precision of GLONASS, Galileo, and BDS MEO satellites generally degraded gradually with the predicted arc length. The RMS of the SLR residuals was slightly larger than the RMS of the orbit overlap differences in the radial direction in the previous section. Considering SLR as the external validation from a different technique, the SLR residuals generally agreed with the orbit overlap precision.
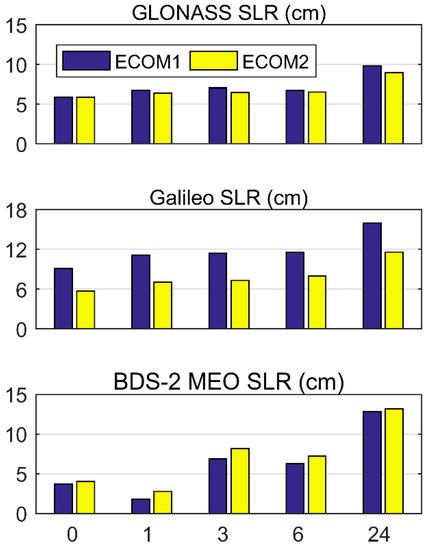
Figure 7.
Satellite laser ranging accuracy for various predicted orbit arcs. The 0 h denotes the observed orbit arc of 24 h, and the predicted orbit arcs include 1, 3, 6, and 24 h. The blue and yellow bars represent the RMS of satellite laser ranging residuals for ECOM 1 and ECOM 2, respectively.
For the GLONASS predicted orbit arc of 1 h, the SLR residuals RMS was 6.7 cm for the ECOM 1 model and 6.4 cm for the ECOM 2 model, which corresponds to an improvement of 5.2% of ECOM 2 compared to ECOM 1. For the GLONASS predicted orbit arc of 24 h, the SLR residuals RMS was 9.8 cm for ECOM 1 and 8.9 cm for ECOM 2, which corresponds to an improvement of 9.2%. For the Galileo predicted orbit arc of 1 h, the SLR residuals RMS was 11.1 cm for the ECOM 1 model and 7.0 cm for ECOM 2, which corresponds to an improvement of 36.9% of ECOM 2 compared to ECOM 1. For the Galileo predicted orbit arc of 24 h, the SLR residuals RMS was 15.9 cm for ECOM 1 and 11.5 cm for ECOM 2, which corresponds to an improvement of 27.7%. For the BDS MEO predicted orbit arc of 24 h, the SLR residuals RMS was 12.8 cm for ECOM 1 and 13.2 cm for ECOM 2, which corresponds to a degradation of 3.1% of ECOM 2 compared to ECOM 1.
For the BDS IGSO satellites, the ECOM 1 model obtained the SLR residuals RMS of 6.8 cm and 74.2 cm for the observed and predicted orbit arc of 24 h, respectively, whereas ECOM 2 model obtained the SLR residuals RMS of 7.7 cm and 99.7 cm, which was a degradation of 13.2% and 34.4% compared to ECOM 1. For the BDS GEO satellites, the respective values for the ECOM 1 model are 27.5 cm and 508.5 cm, and for the ECOM 2 model, they are 13.2 cm and 166.4 cm, which was an improvement of 52.0% and 67.3% compared to ECOM 1.
The satellite laser ranging comparison shows that for GLONASS, Galileo, and BDS GEO satellites, the ECOM 2 model generally achieved better predicted orbits than the ECOM 1 model while for BDS IGSO and MEO satellites the ECOM 1 model generally achieved better predicted orbits than the ECOM 2 model. The satellite laser ranging results generally agreed well with the orbit overlap precision comparison, which confirms the findings with the external validation.
4. Discussion
In the experiment, for GLONASS and Galileo ultra-rapid orbit determination, the ECOM 2 model performed better than the ECOM 1 model in ambiguity resolution, orbit overlap precision, and satellite laser ranging validation, which demonstrates the improved orbits of satellites with markedly elongated bodies [21]. For GLONASS, the ECOM 2 model achieved the fixing rate of 89.3% in ultra-rapid orbit determination, and for the GLONASS predicted orbit arc of 1 h, the overlap precision reached 6.8, 4.3, and 2.5 cm in the along-track, cross-track, and radial direction, respectively, and the SLR residuals RMS reached 6.4 cm. For Galileo, the ECOM 2 model achieved the fixing rate of 83.1% in ultra-rapid orbit determination, and for the Galileo predicted orbit arc of 1 h, the overlap precision reached 8.8, 6.2, and 5.9 cm in the along-track, cross-track, and radial direction, respectively, and the SLR residuals RMS reached 7.0 cm.
For GPS satellites, ECOM 2 obtained a similar fixing rate as ECOM 1 and a slightly better overlap precision in ultra-rapid orbit determination, which may suggest that for GPS satellites with a slightly elongated body, both orbits are accurate enough for ambiguity resolution [27]. For the GPS predicted orbit arc of 1 h, ECOM 2 reached the overlap precision of 3.0, 2.0, and 2.2 cm in the along-track, cross-track, and radial direction, respectively. For BDS IGSO and MEO ultra-rapid orbits, ECOM 1 obtained a similar fixing rate as ECOM 2, and improved orbit overlap precision and SLR residuals, which suggests that ECOM 1 better fits BDS IGSO and MEO satellites with bodies of a nearly cube shape. BDS MEO ultra-rapid orbits obtained similar overlap precision and SLR residuals as Galileo, while BDS IGSO ultra-rapid orbits were worse. For BDS GEO ultra-rapid orbits, ECOM 2 obtained better overlap precision and SLR residuals than ECOM 1, which may be due to the elongated satellite bodies including the communication antenna. ECOM 2 achieved BDS GEO orbit accuracy of 13.2 cm and 166.4 cm for the observed and predicted orbit arc of 24 h, respectively. These ultra-rapid orbits can be applied in global and wide-area precise positioning of the decimeter to centimeter level [6,7,8,9].
5. Conclusions
Multi-GNSS ultra-rapid orbits are crucial for real-time high-precision GNSS applications, and the solar radiation pressure model is one of the main factors influencing predicted orbit accuracy. We focused on analyzing the impact of ECOM solar radiation pressure models on multi-GNSS ultra-rapid orbit determination. The different performances of the ECOM 1 and ECOM 2 models were evaluated in terms of ambiguity resolution, orbit overlap precision, and satellite laser ranging validation in the experiment.
For GLONASS and Galileo ultra-rapid orbits, the ECOM 2 model performed better than the ECOM 1 model in ambiguity resolution, orbit overlap precision, and satellite laser ranging validation. ECOM 2 increased the ambiguity fixing rate to 89.3% and 83.1%, respectively, and improved the predicted orbit accuracy by 9.2% and 27.7%, respectively. For GPS ultra-rapid orbits, ECOM 2 obtained a similar ambiguity fixing rate as ECOM 1 and a slightly better orbit overlap precision. For BDS GEO ultra-rapid orbits, ECOM 2 obtained better overlap precision and SLR residuals, while for BDS IGSO and MEO ultra-rapid orbits, ECOM 1 obtained better orbit overlap precision and SLR residuals.
We focused on analyzing the impact of the ECOM 1 and ECOM 2 solar radiation pressure models on multi-GNSS ultra-rapid orbit determination. The multi-GNSS ultra-rapid orbits obtained high accuracy comparable to that of the current predicted products. The performances of other high-precision solar radiation pressure models on multi-GNSS real-time orbits should be investigated in further studies.
Author Contributions
Conceptualization, Y.L. (Yang Liu), Y.L. (Yanxiong Liu) and Z.T.; methodology, Y.L. (Yang Liu), X.D. and Y.Q.; formal analysis, Y.L. (Yang Liu) and M.L.; writing—original draft, Y.L. (Yang Liu); writing—review and editing, Y.L. and Z.T.
Funding
This research was funded by the National Key Research and Development Plan of China, grant number 2016YFB0501703, the Basic Scientific Fund for National Public Research Institutes of China, grant number 2018Q04, the Fundamental Research Funds for the Central Universities, grant number 2042017kf0047 and China Postdoctoral Science Foundation, grant number 2017M612506.
Acknowledgments
We would like to thank the IGS for providing the MGEX multi-GNSS data and products. This study is supported by the National Key Research and Development Plan of China (2016YFB0501703) and the Basic Scientific Fund for National Public Research Institutes of China (2018Q04). This work is supported by the Fundamental Research Funds for the Central Universities (2042017kf0047) and China Postdoctoral Science Foundation (2017M612506).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Weber, R.; Slater, J.A.; Fragner, E.; Glotov, V.; Habrich, H.; Romero, I.; Schaer, S. Precise GLONASS orbit determination within the IGS/IGLOS – Pilot Project. Adv. Space Res. 2005, 36, 369–375. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Dow, J.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geodesy 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products. 2009. Available online: http://acc.igs.org/UsingIGSProductsVer21.pdf (accessed on 15 August 2019).
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2014, 19, 93–105. [Google Scholar] [CrossRef]
- Deng, Z.; Fritsche, M.; Nischan, T.; Bradke, M. Multi-GNSS Ultra Rapid Orbit-, Clock- & EOP-Product Series. GFZ Data Services. 2016. Available online: http://doi.org/10.5880/GFZ.1.1.2016.003 (accessed on 15 August 2019).
- Deng, Z.; Schuh, H. Improvement of multi-GNSS orbit and clock prediction at GFZ. In Proceedings of the China Satellite Navigation Conference (CSNC) 2017, Shanghai, China, 23–25 May 2017. [Google Scholar]
- Zhao, Q.; Ma, H.; Xu, X.; Guo, J.; Li, M. Hourly updated precise orbit products of quad-constellation satellites in IGS analysis center at Wuhan University. In Proceedings of the 2017 IGS Workshop, Paris, France, 3–7 July 2017. [Google Scholar]
- Li, X.; Chen, X.; Ge, M.; Schuh, H. Improving multi-GNSS ultra-rapid orbit determination for real-time precise point positioning. J. Geodesy 2019, 93, 45–64. [Google Scholar] [CrossRef]
- Tapley, B.; Ries, J. Orbit Determination Requirements for TOPEX. In Proceedings of the AAS/AIAA, Astrodynamics Specialist Conference, Kalispell, MT, USA, 10–13 August 1987. [Google Scholar]
- Fliegel, H.F.; Gallini, T.E.; Swift, E.R. Global Positioning System Radiation Force Model for geodetic applications. J. Geophys. Res. Solid Earth 1992, 97, 559–568. [Google Scholar] [CrossRef]
- Fliegel, H.; Gallini, T. Solar Force Modeling of Block IIR Global Positioning System Satellites. J. Spacecr. Rocket. 1996, 33, 863–866. [Google Scholar] [CrossRef]
- Marshall, J.; Luthcke, S. Modeling Radiation Forces Acting on Topex/Poseidon for Precision Orbit Determination. J. Spacecr. Rocket. 1994, 31, 99–105. [Google Scholar] [CrossRef]
- Ziebart, M.; Adhya, S.; Sibthorpe, A. Combined radiation pressure and thermal modelling of complex satellites: Algorithms and on-orbit tests. Adv. Space Res. 2005, 36, 424–430. [Google Scholar] [CrossRef]
- Bhattarai, S.; Ziebart, M.; Allgeier, S.; Grey, S.; Springer, T.; Harrison, D.; Li, Z. Demonstrating developments in high-fidelity analytical radiation force modelling methods for spacecraft with a new model for GPS IIR/IIR-M. J. Geodesy 2019, 93, 1515–1528. [Google Scholar] [CrossRef]
- Rodriguez-Solano, C.J.; Hugentobler, U.; Steigenberger, P. Adjustable box-wing model for solar radiation pressure impacting GPS satellites. Adv. Space Res. 2012, 49, 1113–1128. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hugentobler, U. Enhanced solar radiation pressure modeling for Galileo satellites. J. Geodesy 2014, 89, 283–297. [Google Scholar] [CrossRef]
- Colombo, O. The Dynamics of Global Positioning Orbits and the Determination of Precise Ephemerides. J. Geophys. Res. 1989, 94, 9167–9182. [Google Scholar] [CrossRef]
- Beutler, G.; Brockmann, E.; Gurtner, W.; Hugentobler, U.; Mervart, L.; Rothacher, M.; Verdun, A. Extended orbit modeling techniques at the CODE processing center of the International GPS Service for geodynamics (IGS): Theory and initial results. Manuscr. Geod. 1994, 19, 367–386. [Google Scholar]
- Springer, T.A.; Beutler, G.; Rothacher, M. A new solar radiation pressure model for the GPS satellites. GPS Solut. 1999, 3, 50–62. [Google Scholar] [CrossRef]
- Arnold, D.; Meindl, M.; Beutler, G.; Dach, R.; Schaer, S.; Lutz, S.; Prange, L.; Sośnica, K.; Mervart, L.; Jäggi, A. CODE’s new solar radiation pressure model for GNSS orbit determination. J. Geodesy 2015, 89, 775–791. [Google Scholar] [CrossRef]
- Bar-Sever, Y.; Kuang, D. New Empirically Derived Solar Radiation Pressure Model for Global Positioning System Satellites. Interplanet. Netw. Prog. Rep. 2004, 42–159, 1–11. [Google Scholar]
- Rodríguez-Solano, C.J. Impact of Non-Conservative Force Modeling on GNSS Satellite Orbits and Global Solutions; Technische Universität München: Munich, Germany, 2014. [Google Scholar]
- Tapley, B.; Schutz, B.; Born, G. Statistical Orbit Determination; Elsevier Academic Press: Burlington, MA, USA, 2004. [Google Scholar]
- Dai, X.; Lou, Y.; Dai, Z.; Qing, Y.; Li, M.; Shi, C. Real-time precise orbit determination for bds satellites using the square root information filter. GPS Solut. 2019, 23, 45. [Google Scholar] [CrossRef]
- Duan, B.; Hugentobler, U.; Chen, J.; Selmke, I.; Wang, J. Prediction versus real-time orbit determination for gnss satellites. GPS Solut. 2019, 23, 39. [Google Scholar] [CrossRef]
- Prange, L.; Orliac, E.; Dach, R.; Arnold, D.; Beutler, G.; Schaer, S.; Jäggi, A. CODE’s five-system orbit and clock solution-the challenges of multi-GNSS data analysis. J. Geodesy 2017, 91, 345–360. [Google Scholar] [CrossRef]
- Guo, J. The Impacts of Attitude, Solar Radiation and Function Model on Precise Orbit Determination for GNSS Satellites. Ph.D. Thesis, Wuhan University, Wuhan, China, 2014. (In Chinese). [Google Scholar]
- Dai, X.; Ge, M.; Lou, Y.; Shi, C.; Wickert, J.; Schuh, H. Estimating the yaw-attitude of BDS IGSO and MEO satellites. J. Geodesy 2015, 89, 1005–1018. [Google Scholar] [CrossRef]
- Lou, Y.; Liu, Y.; Shi, C.; Yao, X.; Zheng, F. Precise orbit determination of BeiDou constellation based on BETS and MGEX network. Sci. Rep. 2014, 4, 4692. [Google Scholar] [CrossRef] [PubMed]
- Montenbruck, O.; Steigenberger, P.; Darugna, F. Semi-analytical solar radiation pressure modeling for QZS-1 orbit-normal and yaw-steering attitude. Adv. Space Res. 2017, 59, 2088–2100. [Google Scholar] [CrossRef]
- Liu, J.; Ge, M. PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ. J. Nat. Sci. 2003, 8, 603–609. [Google Scholar]
- Shi, C.; Zhao, Q.; Geng, J.; Lou, Y.; Ge, M.; Liu, J. Recent development of PANDA software in GNSS data processing. In Proceedings of the SPIE 7285, International Conference on Earth Observation Data Processing and Analysis (ICEODPA), Wuhan, China, 28–30 December 2008; p. 72851S. [Google Scholar]
- Gendt, G.; Ge, M.; Nischan, T.; Uhlemann, M.; Beeskow, G.; Brandt, A. Annual Center Reports: GeoForschungsZentrum (GFZ). In International GNSS Service, Technical Report 2011; Meindl, M., Dach, R., Jean, Y., Astronomical Institute, University of Bern, Eds.; IGS Central Bureau: Pasadena, CA, USA, 2012; pp. 62–66. [Google Scholar]
- Rebischung, P.; Griffiths, J.; Ray, J.; Schmid, R.; Collilieux, X.; Garayt, B. IGS08: The IGS realization of ITRF2008. GPS Solut. 2012, 16, 483–494. [Google Scholar] [CrossRef]
- Dilssner, F.; Springer, T.; Schönemann, E.; Enderle, W. Estimation of Satellite Antenna Phase Center Corrections for BeiDou; IGS Workshop: Pasadena, CA, USA, 2014. [Google Scholar]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 1993, 18, 91–98. [Google Scholar]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L7304. [Google Scholar] [CrossRef]
- Chen, G.; Herring, T.A. Effects of atmospheric azimuthal asymmetry on the analysis of space geodetic data. J. Geophys. Res. 1997, 102, 20489–20502. [Google Scholar] [CrossRef]
- Förste, C.; Schmidt, R.; Stubenvoll, R.; Flechtner, F.; Meyer, U.; König, R.; Neumayer, H.; Biancale, R.; Lemoine, J.; Bruinsma, S.; et al. The GeoForschungsZentrum Potsdam/Groupe de Recherche de Gèodésie Spatiale satellite-only and combined gravity field models: EIGEN-GL04S1 and EIGEN-GL04C. J. Geodesy 2008, 82, 331–346. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions 2010. In No. 36 in IERS Technical Note; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Kouba, J. A simplified yaw-attitude model for eclipsing GPS satellites. GPS Solut. 2009, 13, 1–12. [Google Scholar] [CrossRef]
- Dilssner, F.; Springer, T.; Gienger, G.; Dow, J. The GLONASS-M satellite yaw-attitude model. Adv. Space Res. 2011, 47, 160–171. [Google Scholar] [CrossRef]
- Steigenberger, P.; Hugentobler, U.; Loyer, S.; Perosanz, F.; Prange, L.; Dach, R.; Uhlemann, M.; Gendt, G.; Montenbruck, O. Galileo orbit and clock quality of the IGS Multi-GNSS Experiment. Adv. Space Res. 2015, 55, 269–281. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Dick, G.; Zhang, F.P. Improving carrier-phase ambiguity resolution in global GPS network solutions. J. Geodesy 2005, 79, 103–110. [Google Scholar] [CrossRef]
- Hatch, R. The synergism of GPS code and carrier measurements. In Proceedings of the Third International Symposium on Satellite Doppler Positioning, Las Cruces, NM, USA, 8–12 February 1982; Volume 2, pp. 1213–1231. [Google Scholar]
- Melbourne, W.G. The case for ranging in GPS-based geodetic systems. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 373–386. [Google Scholar]
- Wübbena, G. Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 403–412. [Google Scholar]
- Ge, M.; Gendt, G.; Dick, G.; Zhang, F.; Rothacher, M. A New Data Processing Strategy for Huge GNSS Global Networks. J. Geodesy 2006, 80, 199–203. [Google Scholar] [CrossRef]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of code bias variations of BDS triple-frequency signals and their impacts on ambiguity resolution for long baselines. GPS Solut. 2017, 21, 177–186. [Google Scholar] [CrossRef]
- Ge, M.; Zhang, H.P.; Jia, X.L.; Song, S.L.; Wickert, J. What is achievable with current COMPASS constellation? In Proceedings of the ION GNSS 2012, Institute of Navigation, Nashville, TN, USA, 17–21 September 2012; pp. 331–339. [Google Scholar]
- Liu, Y.; Ge, M.; Shi, C.; Lou, Y.; Wickert, J.; Schuh, H. Improving integer ambiguity resolution for GLONASS precise orbit determination. J. Geodesy 2016, 90, 715–726. [Google Scholar] [CrossRef]
- Geng, J.; Zhao, Q.; Shi, C.; Liu, J. A review on the inter-frequency biases of GLONASS carrier-phase data. J. Geodesy 2017, 91, 329–340. [Google Scholar] [CrossRef]
- Zhao, Q.; Li, X.; Liu, Y.; Geng, J.; Liu, J. Undifferenced ionospheric-free ambiguity resolution using GLONASS data from inhomogeneous stations. GPS Solut. 2018, 22, 26. [Google Scholar] [CrossRef]
- Dach, R.; Schaer, S.; Lutz, S.; Bock, H.; Orliac, E.; Prange, L.; Thaller, D.; Mervart, L.; Jäggi, A.; Beutler, G.; et al. Annual Center Reports: Center for Orbit Determination in Europe (CODE). In International GNSS Service, Technical Report 2011; Meindl, M., Dach, R., Jean, Y., Astronomical Institute, University of Bern, Eds.; IGS Central Bureau: Pasadena, CA, USA, 2012; pp. 29–40. [Google Scholar]
- Griffiths, J.; Ray, J. On the precision and accuracy of IGS orbits. J. Geodesy 2009, 83, 277–287. [Google Scholar] [CrossRef]
- Pearlman, M.R.; Degnan, J.J.; Bosworth, J.M. The International Laser Ranging Service. Adv. Space Res. 2002, 30, 135–143. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).