An Innovative Virtual Simulation Teaching Platform on Digital Mapping with Unmanned Aerial Vehicle for Remote Sensing Education

 ,
, 

Abstract
1. Introduction
- (1)
- Much of the teaching content involves complicated theories and techniques, e.g., UAV digital mapping technology [18], GNSS data processing and adjustment theory [19] or RS image processing [20]. Due to a limited amount of time, the lectures cannot be comprehensive, resulting in less prominent teaching topics. It is not easy for students to grasp the key concepts of the course, hence, increasing the difficulty of learning the bulk of the theory.
- (2)
- The course is relatively difficult, involving many formulas, complex calculations and the assimilation of a long list of teaching methods. Therefore, students’ interest in learning quickly decreases with time; therefore, they are not mastering the topic or performing at the required level (Bachelor or Master).
- (3)
- Although there are practical exercises with RS equipment (e.g., UAV) and dedicated software to analyze the recorded data, students’ feedback shows that this teaching method is insufficient; therefore, the experimental exercises do not achieve the goal at the required level.
- (4)
- Technical background (e.g., geostatistics and image processing) required by the fast development of modern technologies grows at a fast pace, but the training of scientific and technological talents in RS are slowing down compared with the training of other engineering areas (e.g., civil Engineering, Disaster prevention and mitigation Engineering), hence, resulting in a decrease of student’s enrollment in scientific research at master and PhD levels.
2. Virtual Simulation Experiment Teaching Platform: Characteristics and Goals
3. Virtual Simulation Experiment Teaching Platform for Remote Sensing Higher Education at SGG of Wuhan University
3.1. Characteristics and Objectives of VSETP-UAV Teaching Platform on RS at SGG
- (1)
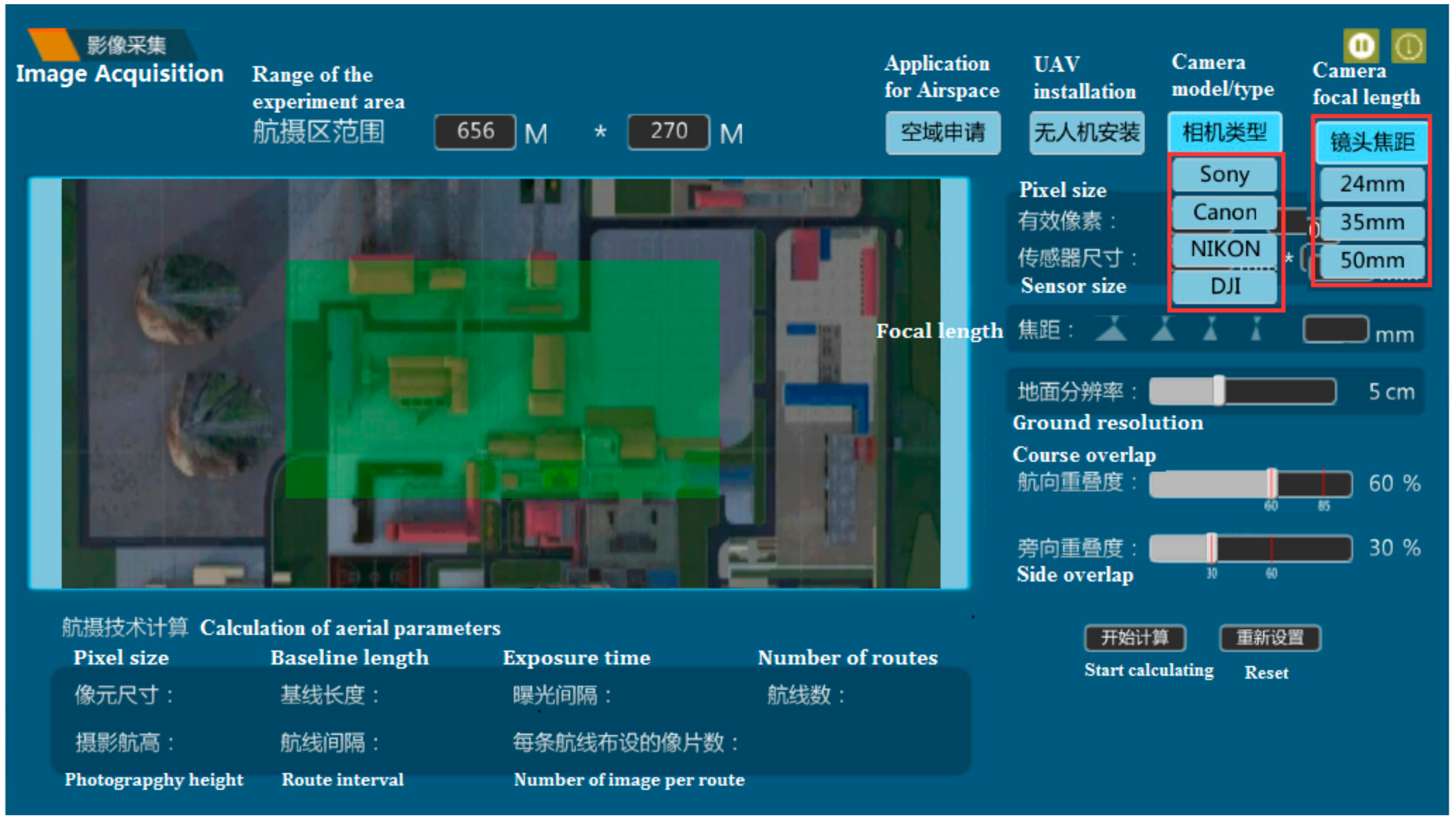
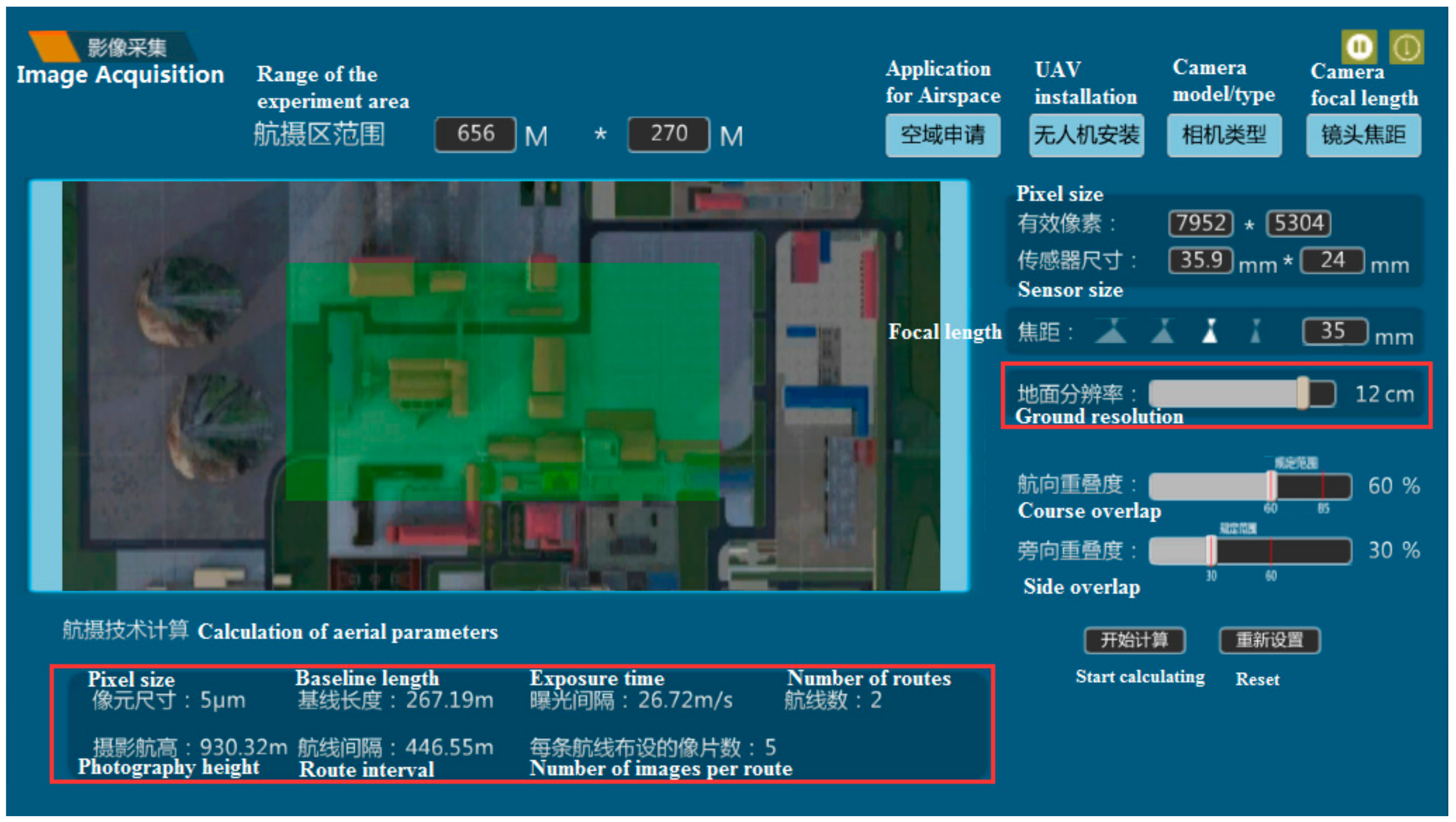
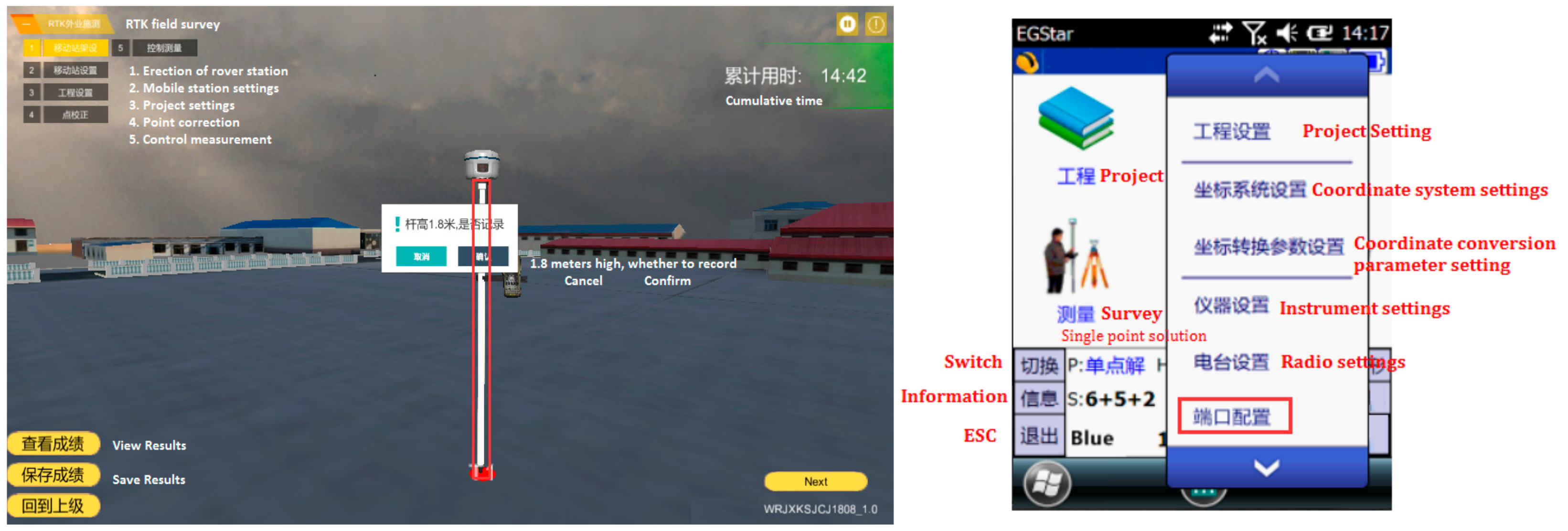
- Learn image acquisition and image control point measurement of drone digital mapping;
- (2)
- Learn the process of image data processing and digital production;
- (3)
- Teach students’ self-learning and innovative practical ability.
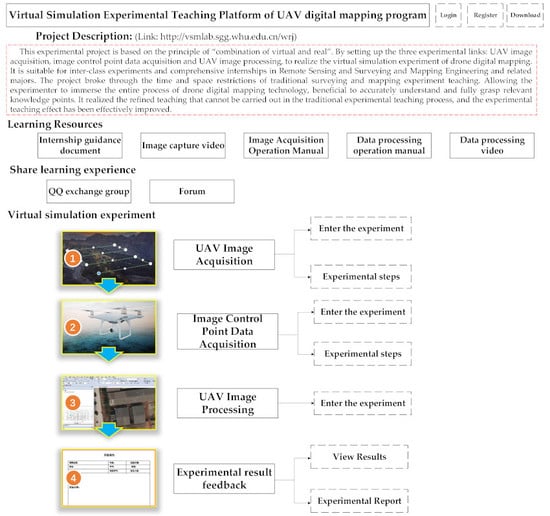
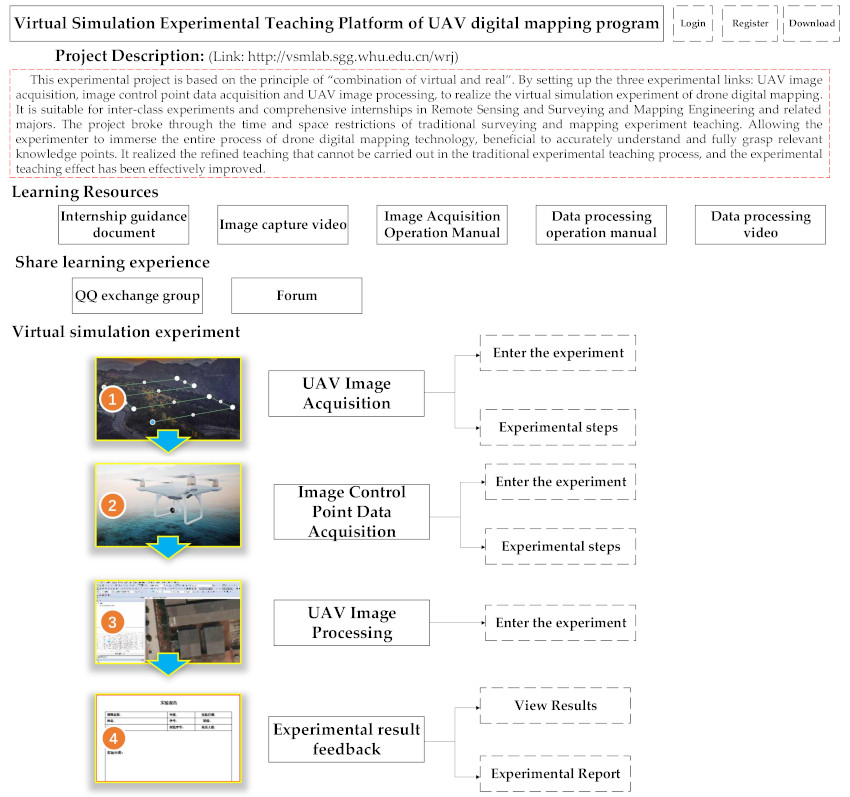
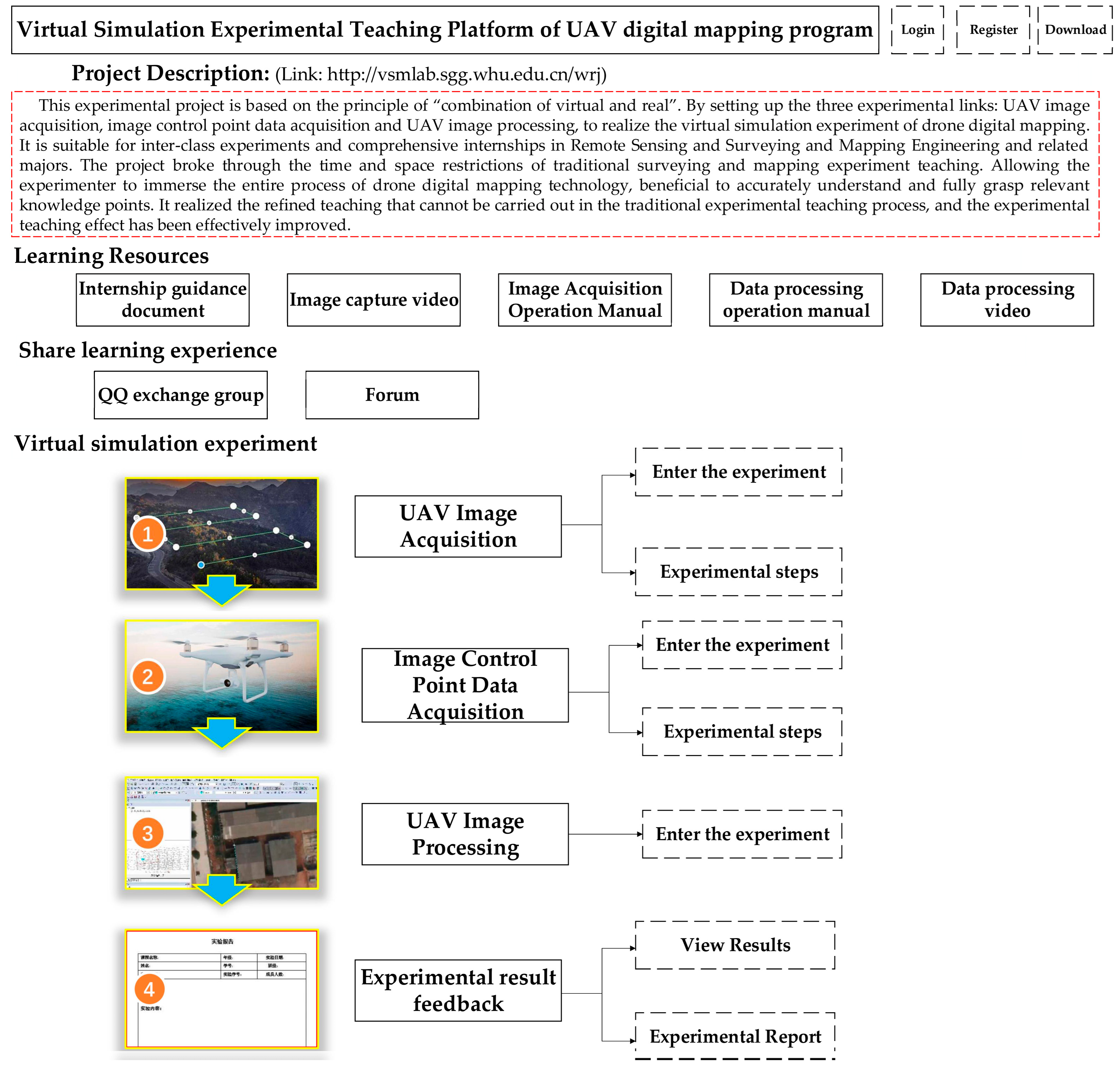
3.2. Systems Design and Function of VSETP-UAV Teaching Platform
3.3. Teaching and Learning Strategies for VSETP-UAV Teaching Platform
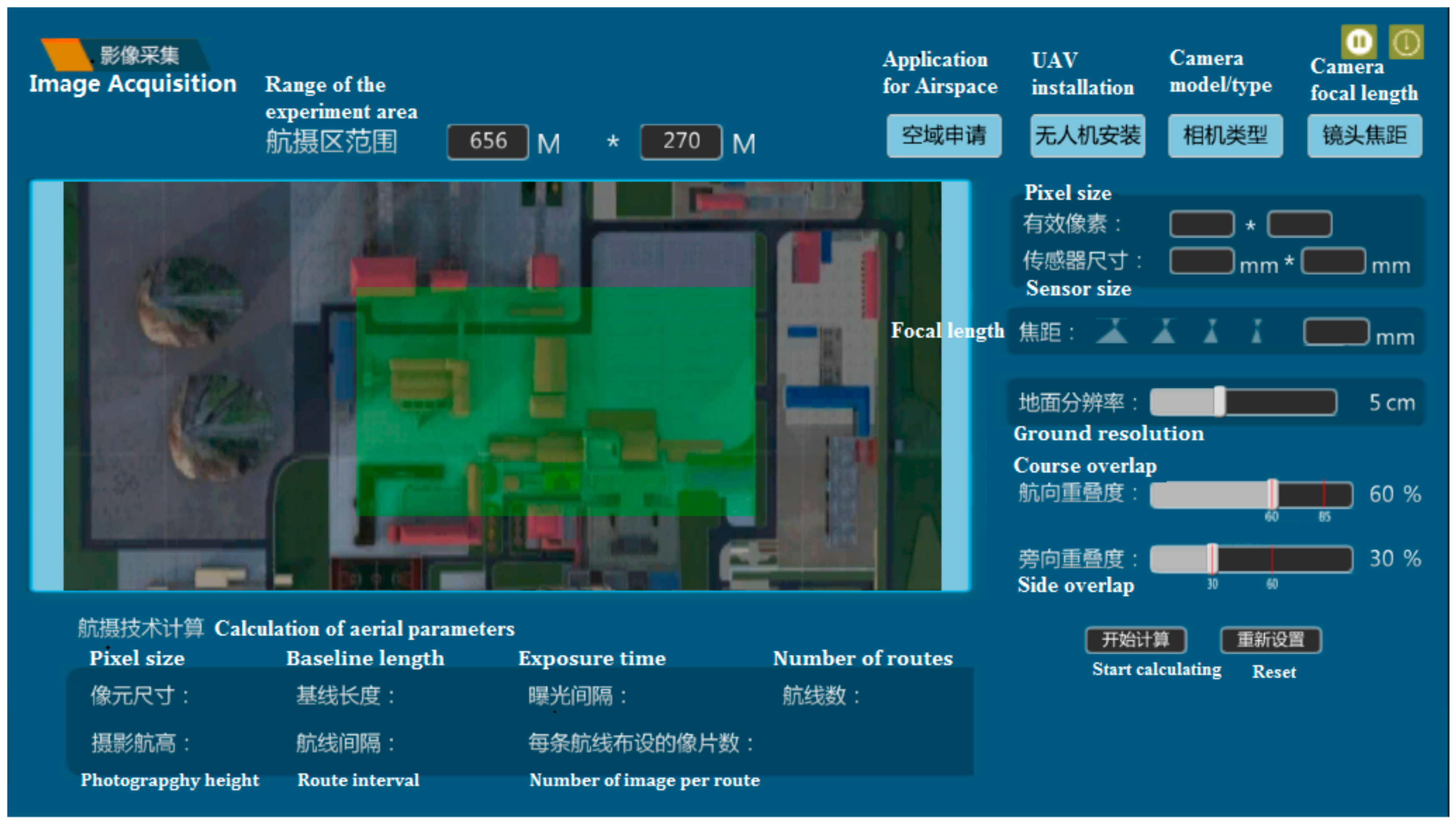
3.4. Experimental Methods and Steps of VSETP-UAV Teaching Platform
3.5. Results of Implemented VSETP-UAV Teaching Platform
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Foresman, T.W.; Cary, T.; Shupin, T.; Eastman, R.; Estes, J.E.; Faust, N.; Jensen, J.R.; Kemp, K.K. Internet teaching foundation for the Remote Sensing Core Curriculum program. ISPRS J. Photogramm. 1997, 52, 294–300. [Google Scholar] [CrossRef]
- Warner, T.A.; Foody, G.M.; Nellis, M.D. The SAGE Handbook of Remote Sensing; Sage Publications: Thousand Oaks, CA, USA; West Virginia University: Morgantown, WV, USA, 2009. [Google Scholar]
- Xu, C.; Qin, Y. Analyzing the Undergraduate Innovative Talent Training Program of the Surveying and Mapping Engineering. Bull. Surv. Mapp. 2014, 6, 124–127. [Google Scholar]
- Campbell, J.; Randolph, B.; Wynne, H. Introduction to Remote Sensing; Guilford Press: Oneonta, NY, USA, 2011. [Google Scholar]
- Konecny, G. Geoinformation: Remote Sensing, Photogrammetry and Geographic Information Systems; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Aina, Y.A.; Aleem, K.F.; Hasan, M.M.; AlGhamdi, H.; Mohamed, A. Geomatics education in the face of global challenges—A Saudi Arabian case study. Surv. Land Inf. Sci. 2014, 73, 81–90. [Google Scholar]
- Netzband, M.; Stefanov, W.L.; Redman, C. (Eds.) Applied Remote Sensing for Urban Planning, Governance and Sustainability; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; Pérez Porras, F.; Triviño-Tarradas, P.; Meroño de Larriva, J.E.; García-Ferrer, A. Project-Based Learning Applied to Unmanned Aerial Systems and Remote Sensing. Remote Sens. 2019, 11, 2413. [Google Scholar] [CrossRef]
- Thakur, P.K.; Aggarwal, S.P.; Nikam, B.R.; Garg, V.; Chouksey, A.; Dhote, P.R. Training, education, research and capacity building needs and future requirements in applications of geospatial technology for water resources management. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-5, 29–36. [Google Scholar] [CrossRef]
- Deng, C.; Zhu, J.; Dai, W.; Zou, Z. Exploration on the Training Mode of Advanced Surveying and Mapping Engineering Talents. Mine Surveying. Res. Explor. Lab. 2014, 5, 101–104. [Google Scholar]
- He, X.; Lu, T.; Li, C. Exploration on talents training pattern of Surveying and Mapping Engineering under the background of Excellent Engineer Program. Eng. Surv. Mapp. 2018, 1, 77–80. [Google Scholar]
- Gan, M.; Hu, P. Intelligence of Higher Education of Surveying and Mapping in the New Subject Stage. Eng. Technol. Res. 2019, 10, 232–233. [Google Scholar]
- Coates, H. Student Engagement in Campus-Based and Online Education: University Connections; Routledge: Abingdon, UK, 2006. [Google Scholar]
- Nowell, C. The influence of motivational orientation on the satisfaction of university students. Teach. High. Ed. 2017, 22, 855–866. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, Z.; Zhang, A.; Liu, H.; Sun, Q. Research on Graduation Design Teaching Based on OBE Concept under the Background of Internet plus Geomatics. Bull. Surv. Mapp. 2018, 11, 148–150. [Google Scholar]
- Zhang, Y.; Li, C.; Tang, J. Construction and practice of practical teaching system of cultivating applied talents in surveying and mapping engineering major for traffic industry. Eng. Surv. Mapp. 2017, 9, 73–76. [Google Scholar]
- Li, Z. UAV for mapping-low altitude photogrammetric survey. Int. Arch. Photogramm. Remote Sens. 2008, 37, 1183–1186. [Google Scholar]
- Teunissen, P.J.G. Teunissen PJG 2006 Testing Theory: An Introduction, 2nd ed.; VSSD: Delft, The Netherlands.
- Schowengerdt, R.A. Remote Sensing: Models and Methods for Image Processing; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Shi, X.; Zhang, Y.; Zhang, L.; Wang, L. Virtual Simulation Experiment Teaching Platform Based on 3R-4A Computer System. In International Conference of Pioneering Computer Scientists, Engineers and Educators; Springer: Singapore, 2016; pp. 110–117. [Google Scholar]
- Qu, S.Y.; Hu, T.; Wu, J.L.; Hou, X.M. Experimental Teaching Centre Platform New Engineering Practice Teaching Mode. Eurasia J. Math. Sci. Technol. Educ. 2017, 13, 4271–4279. [Google Scholar] [CrossRef]
- Zhang, H.L.; Zhou-Qi, L.I.; Kang, Y.X. Construction of the national virtual simulation experiment teaching center of forest biology. Res. Explor. Lab 2017. [Google Scholar]
- Matthew, R.G.S.; Hughes, D.C. Getting at deep learning: A problem-based approach. Eng. Sci. Educ. J. 1994, 3, 234–240. [Google Scholar] [CrossRef]
- Xu, C. Preliminary Study of Innovating Courses System of Geodesy and Geomatics. Bull. Surv. Mapp. 2007, 11, 74–77. [Google Scholar]
- Alcarria, R.; Bordel, B.; Manso, M.Á.; Iturrioz, T.; Pérez, M. Analyzing UAV-based remote sensing and WSN support for data fusion. In International Conference on Information Theoretic Security; Springer: Cham, Switzerland, 2018; pp. 756–766. [Google Scholar]
- Rodriguez, A.L.; Parrilla, L.M.; Simon-Muela, A.; Prats, M.M.; Querejeta, C.; de Blanes, F.G. Real time sensor acquisition platform for experimental UAV research. In Proceedings of the 2009 IEEE/AIAA 28th Digital Avionics Systems Conference, Orlando, FL, USA, 23–29 October 2009. [Google Scholar]
- Gupta, R.P. Digital Elevation Model. In Remote Sensing Geology; Springer: Berlin/Heidelberg, Germany, 2018; pp. 101–106. [Google Scholar]
- Wu, Z.; Ni, M.; Hu, Z.; Wang, J.; Li, Q.; Wu, G. Mapping invasive plant with UAV-derived 3D mesh model in mountain area-A case study in Shenzhen Coast, China. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 129–139. [Google Scholar] [CrossRef]
- Jalloh, Y.; Ahmad, A.; Amin, Z.M.; Sasaki, K. Conventional Total Station Versus Digital Photogrammetry in Land Development Applications. J. Environ. Anal. Toxicol. 2016, 7, 1–6. [Google Scholar] [CrossRef]
- Samad, A.M.; Kamarulzaman, N.; Hamdani, M.A.; Mastor, T.A.; Hashim, K.A. The potential of Unmanned Aerial Vehicle (UAV) for civilian and mapping application. In Proceedings of the 2013 IEEE 3rd International Conference on System Engineering and Technology, Shah Alam, Malaysia, 1–31 July 2013; pp. 313–318. [Google Scholar]
- Cramer, M.; Przybilla, H.J.; Zurhorst, A. UAV cameras: Overview and geometric calibration benchmark. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 85. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.J. Accuracy analysis of photogrammetric UAV image blocks: Influence of onboard RTK-GNSS and cross flight patterns. In Photogrammetrie-Fernerkundung-Geoinformation; E. Schweizerbart’sche Verlagsbuchhandlung: Stuttgart, Germany, 2016; pp. 17–30. [Google Scholar]
- Makadia, A.A.; Dalal, C.S.; Srinivasan, P.K. Automatic Remote Monitoring Stations for GNSS Interference Monitoring. Int. J. Technol. Res. Eng. 2015, 2, 1357–1360. [Google Scholar]
- Tonkin, T.; Midgley, N. Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Organization | Undergraduate Teaching Program |
|---|---|
| Wuhan University | UAV digital mapping virtual simulation program |
| Wuhan University | Open space remote sensing observation virtual simulation experiment teaching project |
| Capital Normal University | UAV aerial photogrammetry virtual simulation comprehensive experimental teaching project |
| China University of Geosciences, Beijing | Virtual Experiment of Spatial Information Collection and Geographic Environment Simulation under Complex Terrain Conditions |
| Nanjing Tech University | Virtual simulation experiment of UAV aerial mapping process |
| Zhejiang A&F University | UAV tilt photography measurement virtual simulation experiment teaching project |
| Shandong Agriculture and Engineering University | Rural Revitalization Model Village Digital Mapping Simulation Virtual Experiment Teaching Project |
| Henan Polytechnic University | Virtual Simulation Experiment of Surface Deformation Monitoring in Mining Area |
| Equipment | Requirements |
|---|---|
| Internet environment | Internet access (>10MB)/Cellular network (4G, 5G)/Campus LAN |
| CPU (central processing unit) | INTEL I5 8400 or higher |
| Memory | 4G DDR4 or higher |
| GPU (graphics processing unit) | NVIDIA GeForce>1G |
| Database | MySQL |
| Monitor | 1024×768 |
| Operating system | Microsoft Windows 7 or higher version |
| Plugin | 3DS Max, Maya |
| Development language | J2EE, JAVA, Unity3D, C#/JS |
| Development tool | Eclipse, Visual Studio |
| n | Knowledge Point | Operational Steps |
|---|---|---|
| 1 | UAV Route Planning | data acquisition |
| 2 | Aerial photography parameter selection and calculation | |
| 3 | Layout of image control point | |
| 4 | Image control point measurement | |
| 5 | Image matching | data processing |
| 6 | Aerial Triangulation | |
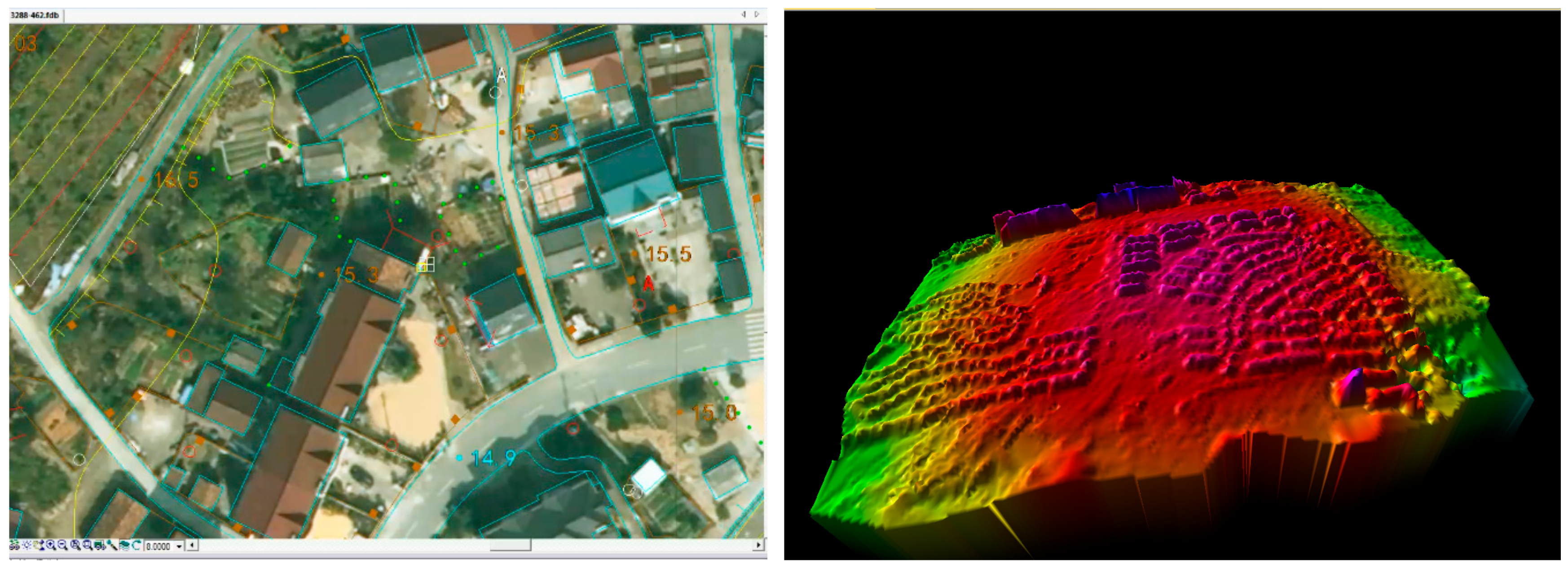
| 7 | Digital line drawing (DLG) production | data output |
| 8 | Digital elevation model (DEM) production | |
| 9 | Digital orthophoto map (DOM) production |
| Experimental Mode | Operation Time (Week) | Rework Rate | Practical Assessment Time | Skill Performance | ||
|---|---|---|---|---|---|---|
| Plan | Actual | Image Control Point Measurement | Data Processing | |||
| Traditional experiment | 2 | 1.7 | 50% | - | 4 day | good |
| UAV virtual simulation experiment | 2 | 1.2 | 20% | 20–30 min | 2.5 day | excellent |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, X.; Hua, X.; Montillet, J.-P.; Yu, K.; Zou, J.; Xiang, D.; Zhu, H.; Zhang, D.; Huang, Z.; Zhao, B. An Innovative Virtual Simulation Teaching Platform on Digital Mapping with Unmanned Aerial Vehicle for Remote Sensing Education. Remote Sens. 2019, 11, 2993. https://doi.org/10.3390/rs11242993
He X, Hua X, Montillet J-P, Yu K, Zou J, Xiang D, Zhu H, Zhang D, Huang Z, Zhao B. An Innovative Virtual Simulation Teaching Platform on Digital Mapping with Unmanned Aerial Vehicle for Remote Sensing Education. Remote Sensing. 2019; 11(24):2993. https://doi.org/10.3390/rs11242993
Chicago/Turabian StyleHe, Xiaoxing, Xianghong Hua, Jean-Philippe Montillet, Kegen Yu, Jingui Zou, Dong Xiang, Huiping Zhu, Di Zhang, Zhengkai Huang, and Bufan Zhao. 2019. "An Innovative Virtual Simulation Teaching Platform on Digital Mapping with Unmanned Aerial Vehicle for Remote Sensing Education" Remote Sensing 11, no. 24: 2993. https://doi.org/10.3390/rs11242993
APA StyleHe, X., Hua, X., Montillet, J.-P., Yu, K., Zou, J., Xiang, D., Zhu, H., Zhang, D., Huang, Z., & Zhao, B. (2019). An Innovative Virtual Simulation Teaching Platform on Digital Mapping with Unmanned Aerial Vehicle for Remote Sensing Education. Remote Sensing, 11(24), 2993. https://doi.org/10.3390/rs11242993