Analysis of the Optimal Wavelength for Oceanographic Lidar at the Global Scale Based on the Inherent Optical Properties of Water


Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Data and Methods
2.1. Data
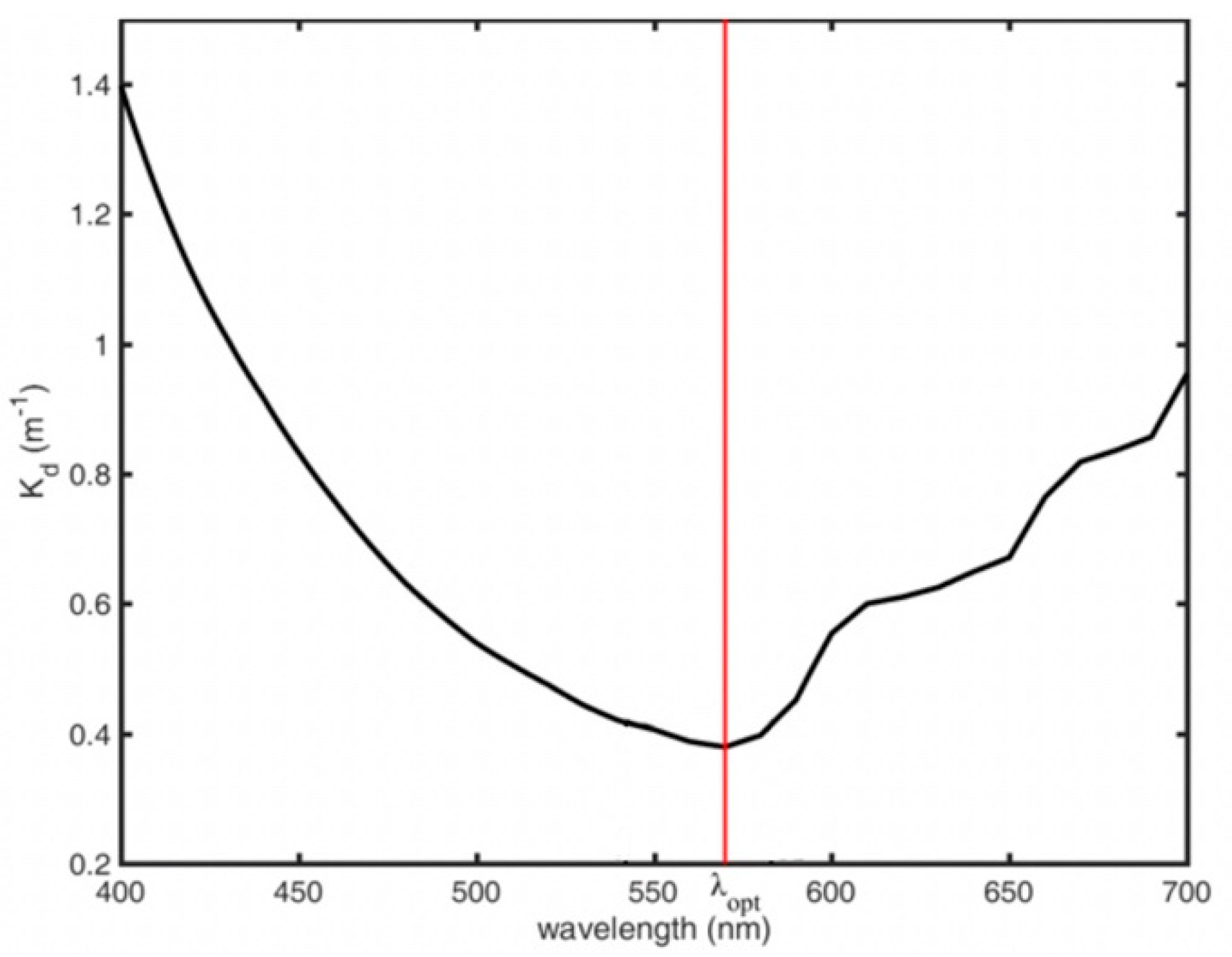
2.2. Definition of the Optimal Wavelength and the Detectable Depth
2.3. Method to Retrieve the Hyper-Spectral at the Global Scale
3. Results
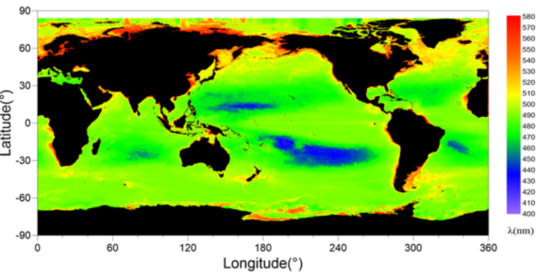
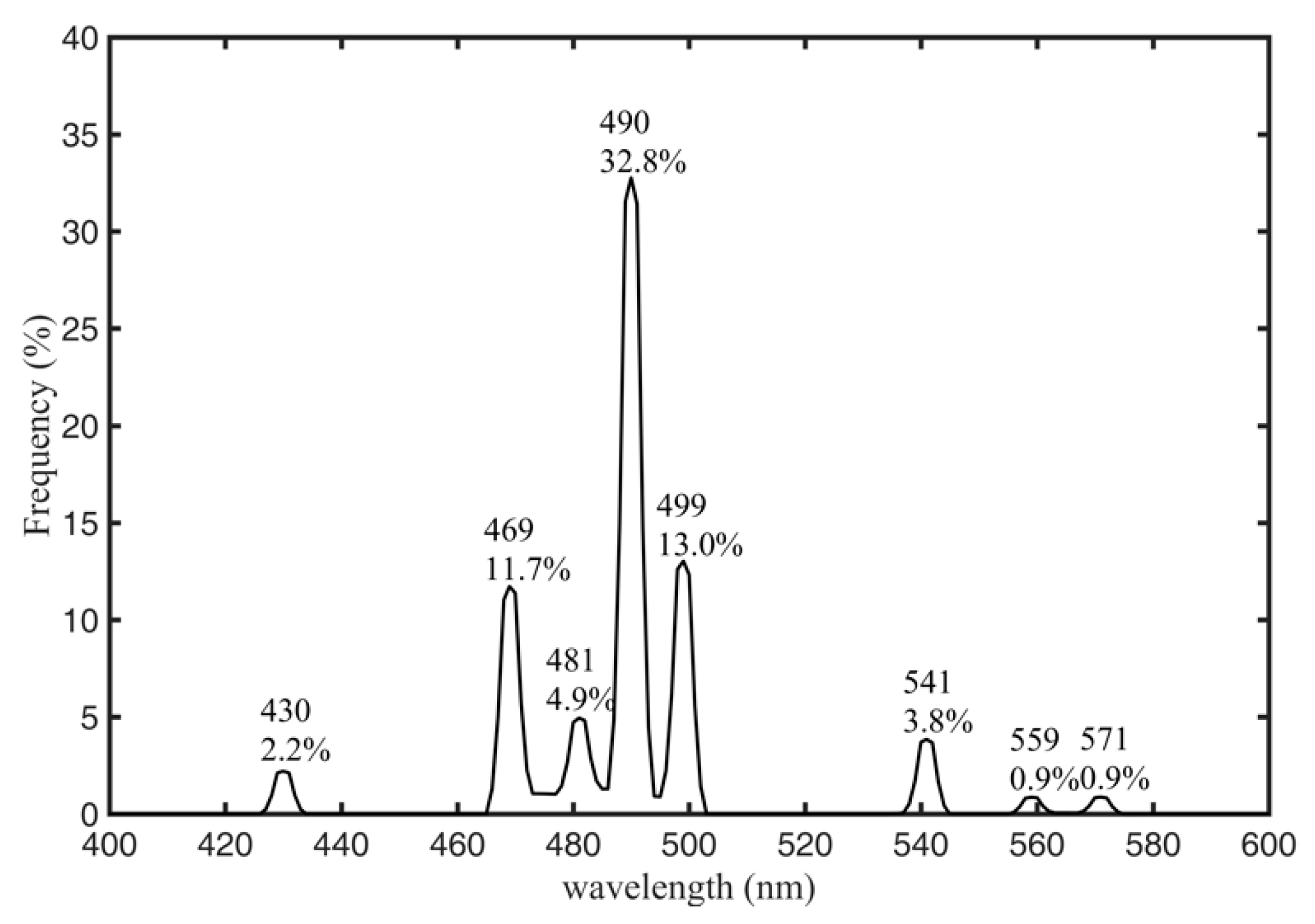
3.1. Distribution of the Optimal Wavelength at the Global Scale
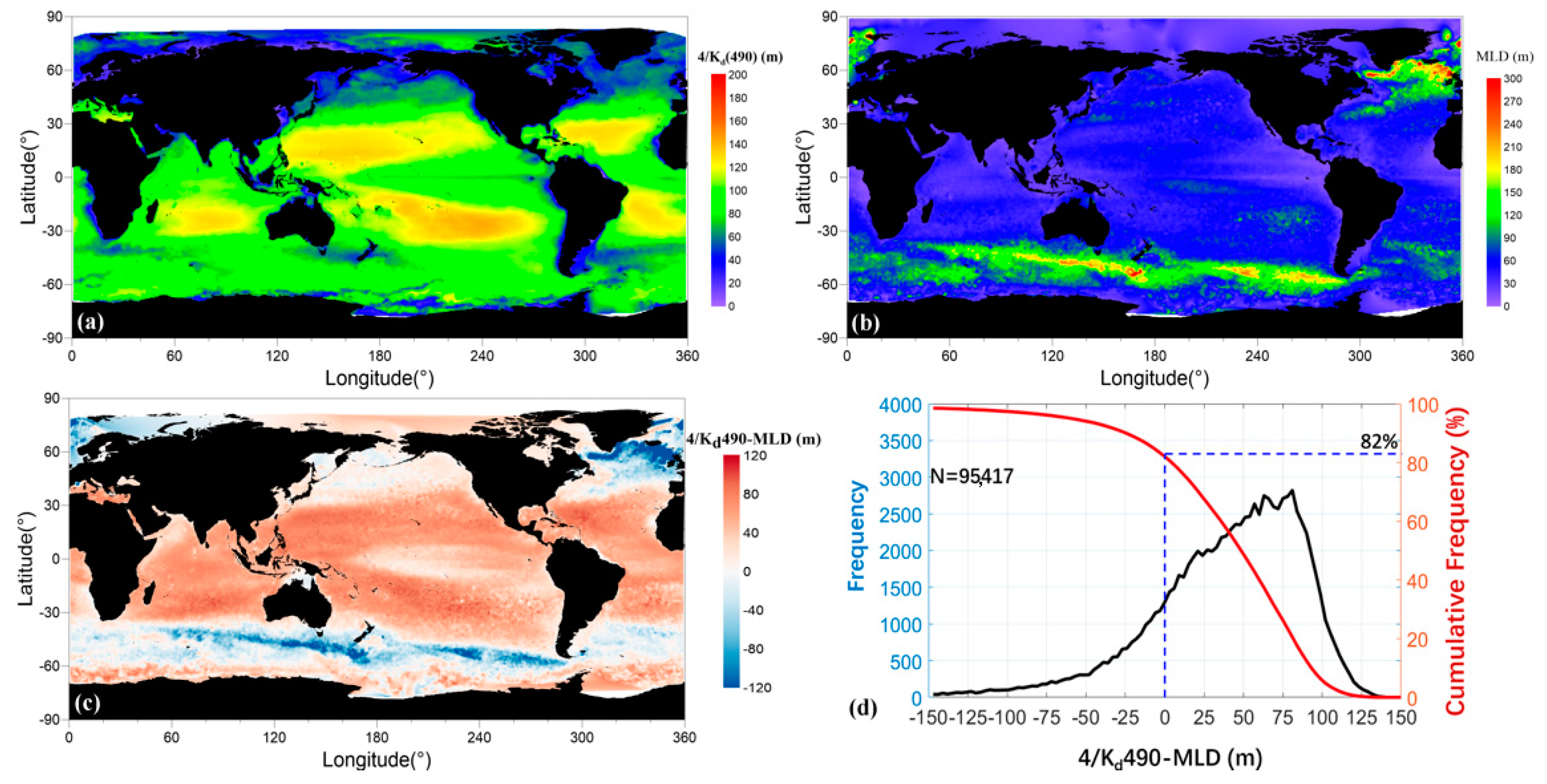
3.2. Distribution of the Maximum Detectable Depth of Lidar at the Global Scale and its Relationship with the Upper Mixed Layer Depth
4. Discussion
4.1. Comparison of the Performances of Oceanographic Lidar Systems with Different Wavelengths
4.2. Impact of Different Detection Ability of Lidar System on Detection Performance
5. Conclusions
- (a)
- The optimal wavelengths for oceanographic lidar systems are those between the blue and green bands. For the open ocean, the optimal wavelengths are between 420 and 510 nm, and for coastal waters, the optimal wavelengths are between 520 and 580 nm. A lidar system with multiple bands is the best configuration for obtaining the best detection at the global scale. In addition, if an oceanographic lidar system with a single band is used at the global scale, a 490 nm wavelength is recommended.
- (b)
- Using the 490 nm band, a lidar system with four attenuating length detection methods can penetrate the mixed layer of over 80% of global waters.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Brainerd, K.E.; Gregg, M.C. Surface mixed and mixing layer depths. Deep Sea Res. 1995, 42, 1521–1543. [Google Scholar] [CrossRef]
- De Boyer Montégut, C.; Madec, G.; Fischer, A.S.; Lazar, A.; Iudicone, D. Mixed layer depth over the global ocean: An examination of profile data and a profile-based climatology. J. Geophys. Res. 2004, 109, C12003. [Google Scholar] [CrossRef]
- Morel, A.; Berthon, J. Surface pigments, algal biomass profiles, and potential production of the euphotic layer: Relationships reinvestigated in view of remote-sensing applications. Limnol. Oceanogr. 1989, 34, 1545–1562. [Google Scholar] [CrossRef]
- Collister, B.L.; Zimmerman, R.C.; Sukenik, C.I.; Hill, V.J.; Balch, W.M. Remote sensing of optical characteristics and particle distributions of the upper ocean using shipboard lidar. Remote Sens. Environ. 2018, 215, 85–96. [Google Scholar] [CrossRef]
- Hair, J.; Hostetler, C.; Hu, Y.; Behrenfeld, M.; Butler, C.; Harper, D.; Hare, R.; Berkoff, T.; Cook, A.; Collins, J. Combined atmospheric and ocean profiling from an airborne high spectral resolution lidar. EPJ Web Conf. 2016, 119, 22001. [Google Scholar] [CrossRef]
- Churnside, J.H. Review of profiling oceanographic lidar. Opt. Eng. 2013, 53, 051405. [Google Scholar] [CrossRef]
- Hu, Y.; Behrenfeld, M.; Hostetler, C.; Pelon, J.; Trepte, C.; Hair, J.; Slade, W.; Cetinic, I.; Vaughan, M.; Lu, X.; et al. Ocean lidar measurements of beam attenuation and a roadmap to accurate phytoplankton biomass estimates. EPJ Web Conf. 2016, 119, 22003. [Google Scholar] [CrossRef]
- Behrenfeld, M.J.; Hu, Y.; O’Malley, R.T.; Boss, E.S.; Hostetler, C.A.; Siegel, D.A.; Sarmiento, J.L.; Schulien, J.; Hair, J.W.; Lu, X.; et al. Annual boom–bust cycles of polar phytoplankton biomass revealed by space-based lidar. Nat. Geosci. 2017, 10, 118–122. [Google Scholar] [CrossRef]
- Chen, G.; Tang, J.; Zhao, C.; Wu, S.; Yu, F.; Ma, C.; Xu, Y.; Chen, W.; Zhang, Y.; Liu, J.; et al. Concept Design of the “Guanlan” Science Mission: China’s Novel Contribution to Space Oceanography. Front. Mar. Sci. 2019, 6, 194. [Google Scholar] [CrossRef]
- Jamet, C.; Ibrahim, A.; Ahmad, Z.; Angelini, F.; Babin, M.; Behrenfeld, M.J.; Boss, E.; Cairns, B.; Churnside, J.; Chowdhary, J.; et al. Going Beyond Standard Ocean Color Observations: Lidar and Polarimetry. Front. Mar. Sci. 2019, 6, 251. [Google Scholar] [CrossRef]
- Behrenfeld, M.J.; Hu, Y.; Hostetler, C.A.; Dall’Olmo, G.; Rodier, S.D.; Hair, J.W.; Trepte, C.R. Space-based lidar measurements of global ocean carbon stocks. Geophys. Res. Lett. 2013, 40, 4355–4360. [Google Scholar] [CrossRef]
- Churnside, J.; Hair, J.; Hostetler, C.; Scarino, A. Ocean Backscatter Profiling Using High-Spectral-Resolution Lidar and a Perturbation Retrieval. Remote Sens. 2018, 10, 2003. [Google Scholar] [CrossRef]
- Bogucki, D.J.; Spiers, G. What percentage of the oceanic mixed layer is accessible to marine Lidar? Global and the Gulf of Mexico prospective. Opt. Express 2013, 21, 23997–24014. [Google Scholar] [CrossRef] [PubMed]
- Gray, D.J.; Anderson, J.; Nelson, J.; Edwards, J. Using a multiwavelength LiDAR for improved remote sensing of natural waters. Appl. Opt. 2015, 54, 232–242. [Google Scholar] [CrossRef]
- Ocean Color Web. Available online: https://oceancolor.gsfc.nasa.gov/ (accessed on 18 October 2019).
- ARGO GDAC global distribution—FTP Directory Listing—Ifremer. Available online: ftp://ftp.ifremer.fr/ifremer/argo (accessed on 18 October 2019).
- Zege, E.P.; Katsev, I.L.; Prikhach, A.S. Inversion of Airborne Ocean LIDAR Waveforms. In Proceedings of the 22nd Internation Laser Radar Conference, Matera, Italy, 12–16 July 2004; Available online: http://www.researchgate.net/profile/Eleonora_Zege/publication/234256823_Inversion_of_Airborne_Ocean_LIDAR_Waveforms/links/09e4151126723b24f4000000.pdf (accessed on 18 October 2019).
- Teledyne Optech. CZMIL-Nova Coastal Zone Mapping and Imaging LiDAR. Available online: http://info.teledyneoptech.com/acton/attachment/19958/f-02c3/1/-/-/-/-/CZMIL-Nova-Intro-Brochure-150626-WEB.pdf (accessed on 18 October 2019).
- Airborne Hydrography. A. B. Leica AHAB “HawkEye III Topographic & Bathymetric LiDAR System”. Available online: http://www.airbornehydro.com/sites/default/files/Leica%20AHAB%20HawkEye%20DS (accessed on 18 October 2019).
- Hu, C.; Lee, Z.P.; Franz, B. Chlorophyll a algorithms for oligotrophic oceans: A novel approach based on three-band reflectance difference. J. Geophys. Res. Ocean. 2011, 117, C01011. [Google Scholar] [CrossRef]
- Lee, Z.P.; Carder, K.L.; Arnone, R. Deriving inherent optical properties from water color: A multiband quasi-analytical algorithm for optically deep waters. Appl. Opt. 2002, 41, 5755–5772. [Google Scholar] [CrossRef]
- Lee, Z.P.; Carder, K.L.; Peacock, T.G.; Davis, C.O.; Mueller, J.L. Method to derive ocean absorption coefficients from remote-sensing reflectance. Appl. Opt. 1996, 35, 453–462. [Google Scholar] [CrossRef]
- Morel, A.; Maritorena, S. Bio-optical properties of oceanic waters: A reappraisal. J. Geophys. Res. Ocean. 2001, 106, 7163–7180. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, T. Evaluation of a QAA-based algorithm using MODIS land bands data for retrieval of IOPs in the Eastern China Seas. Opt. Express 2015, 23, 13953–13971. [Google Scholar] [CrossRef]
- Lee, Z.P.; Hu, C.; Shang, S.; Du, K.; Lewis, M.R.; Arnone, R.; Brewin, R.J. Penetration of UV-visible solar radiation in the global oceans: Insights from ocean color remote sensing. J. Geophys. Res. 2013, 118, 4241–4255. [Google Scholar] [CrossRef]
- Holte, J.; Talley, L.D.; Gilson, J.; Roemmich, D. An Argo mixed layer climatology and database. Geophys. Res. Lett. 2017, 44, 5618–5626. [Google Scholar] [CrossRef]
- Hostetler, C.A.; Behrenfeld, M.J.; Hu, Y.; Hair, J.W.; Schulien, J.A. Spaceborne Lidar in the Study of Marine Systems. Annu. Rev. Mar. Sci. 2018, 10, 121–147. [Google Scholar] [CrossRef] [PubMed]
- Morel, A. Optical modeling of the upper ocean in relation to its biogenous matter content (Case I waters). J. Geophys. Res. 1988, 93, 10749–10768. [Google Scholar] [CrossRef]
- Gordon, H.R.; Morel, A. Remote Assessment of Ocean Color for Interpretation of Satellite Visible Imagery: A Review; Springer: New York, NY, USA, 1983. [Google Scholar]
- Lavigne, H.; Dortenzio, F.; Dalcala, M.R.; Claustre, H.; Sauzede, R.; Gacic, M. On the vertical distribution of the chlorophyll a concentration in the Mediterranean Sea: A basin scale and seasonal approach. Biogeosciences 2015, 12, 5021–5039. [Google Scholar] [CrossRef]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Xue, C.; Zhang, T.; Hu, L.; Chen, G.; Tang, J. Analysis of the Optimal Wavelength for Oceanographic Lidar at the Global Scale Based on the Inherent Optical Properties of Water. Remote Sens. 2019, 11, 2705. https://doi.org/10.3390/rs11222705
Chen S, Xue C, Zhang T, Hu L, Chen G, Tang J. Analysis of the Optimal Wavelength for Oceanographic Lidar at the Global Scale Based on the Inherent Optical Properties of Water. Remote Sensing. 2019; 11(22):2705. https://doi.org/10.3390/rs11222705
Chicago/Turabian StyleChen, Shuguo, Cheng Xue, Tinglu Zhang, Lianbo Hu, Ge Chen, and Junwu Tang. 2019. "Analysis of the Optimal Wavelength for Oceanographic Lidar at the Global Scale Based on the Inherent Optical Properties of Water" Remote Sensing 11, no. 22: 2705. https://doi.org/10.3390/rs11222705
APA StyleChen, S., Xue, C., Zhang, T., Hu, L., Chen, G., & Tang, J. (2019). Analysis of the Optimal Wavelength for Oceanographic Lidar at the Global Scale Based on the Inherent Optical Properties of Water. Remote Sensing, 11(22), 2705. https://doi.org/10.3390/rs11222705