Evaluation of Incident Light Sensors on Unmanned Aircraft for Calculation of Spectral Reflectance

Abstract
:
1. Introduction
2. Methods
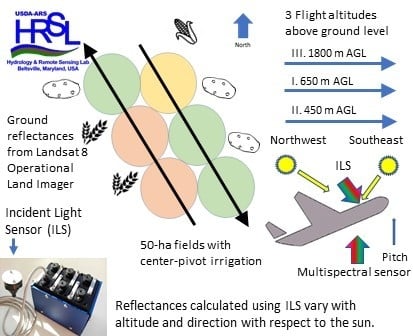
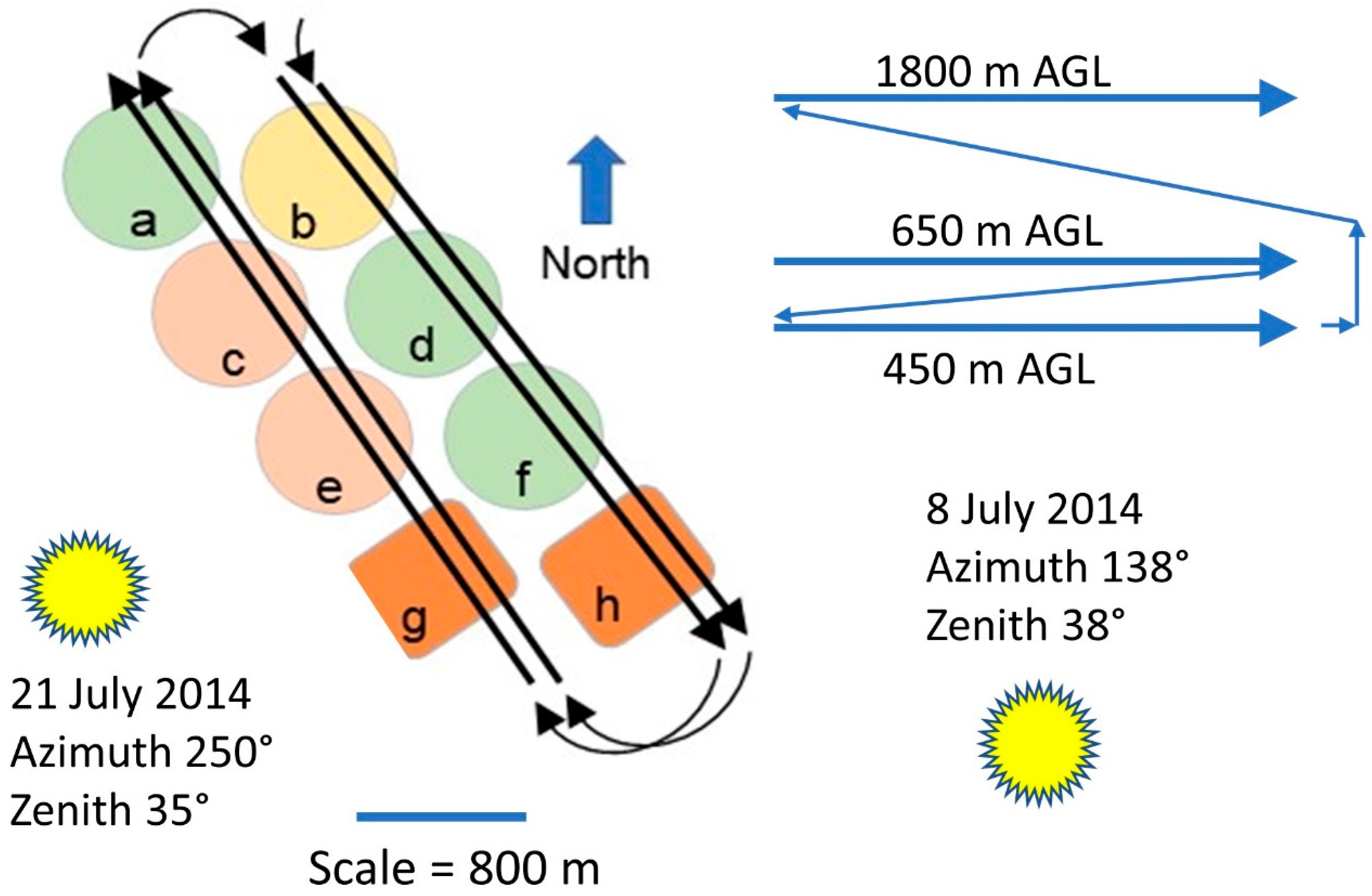
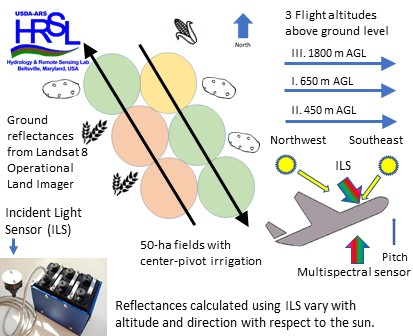
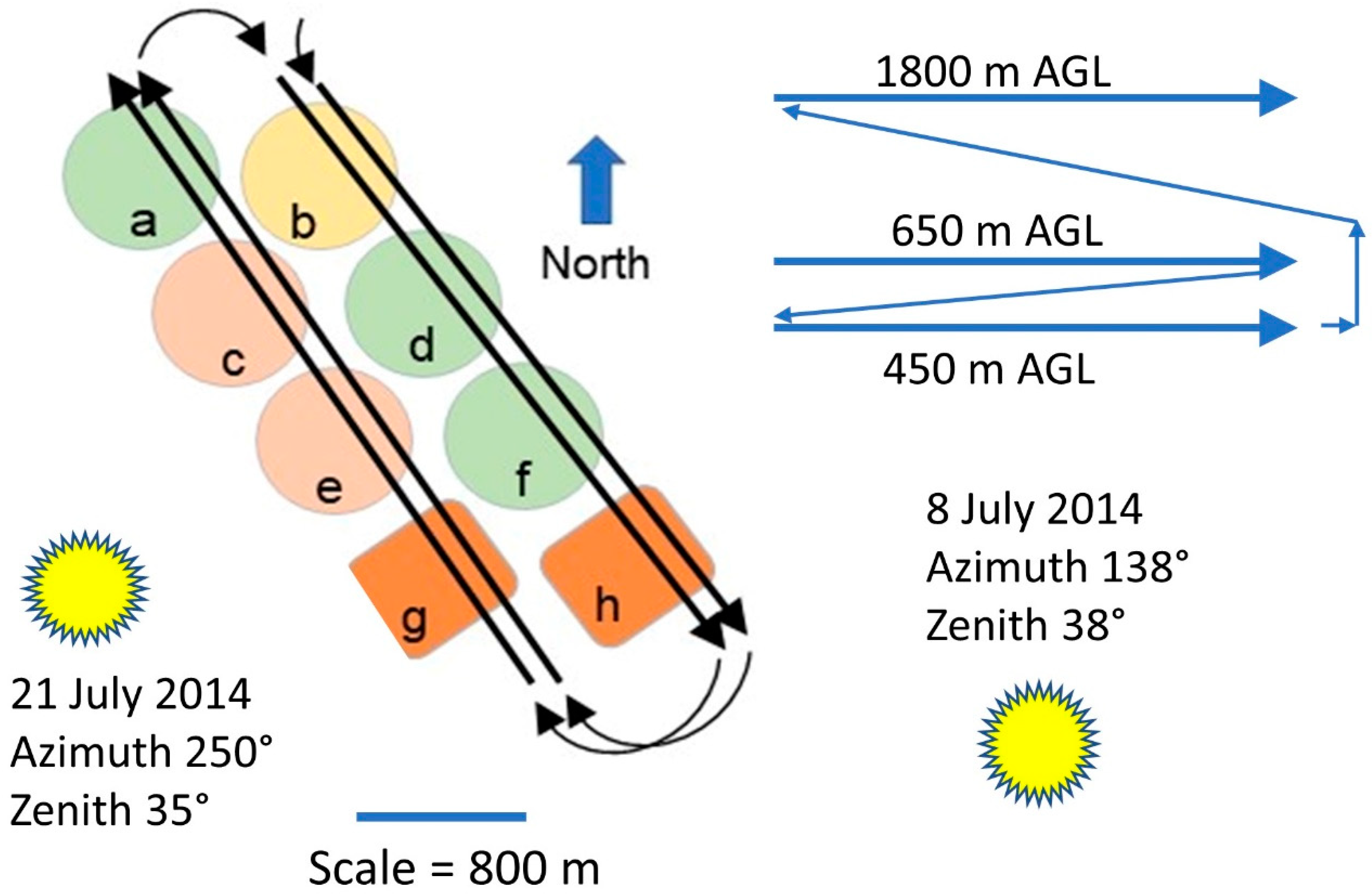
2.1. Experimental Design and Flight Plan
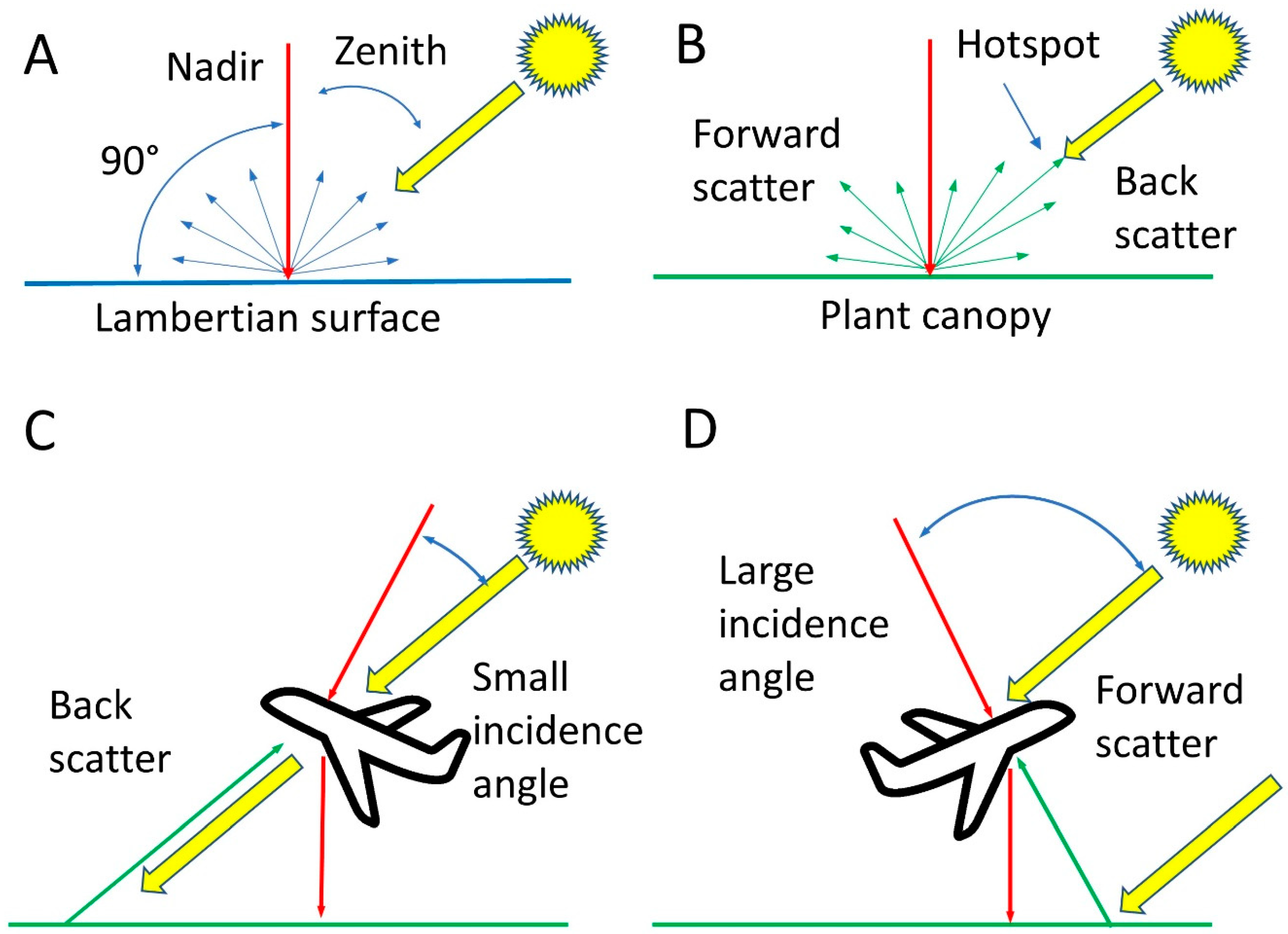
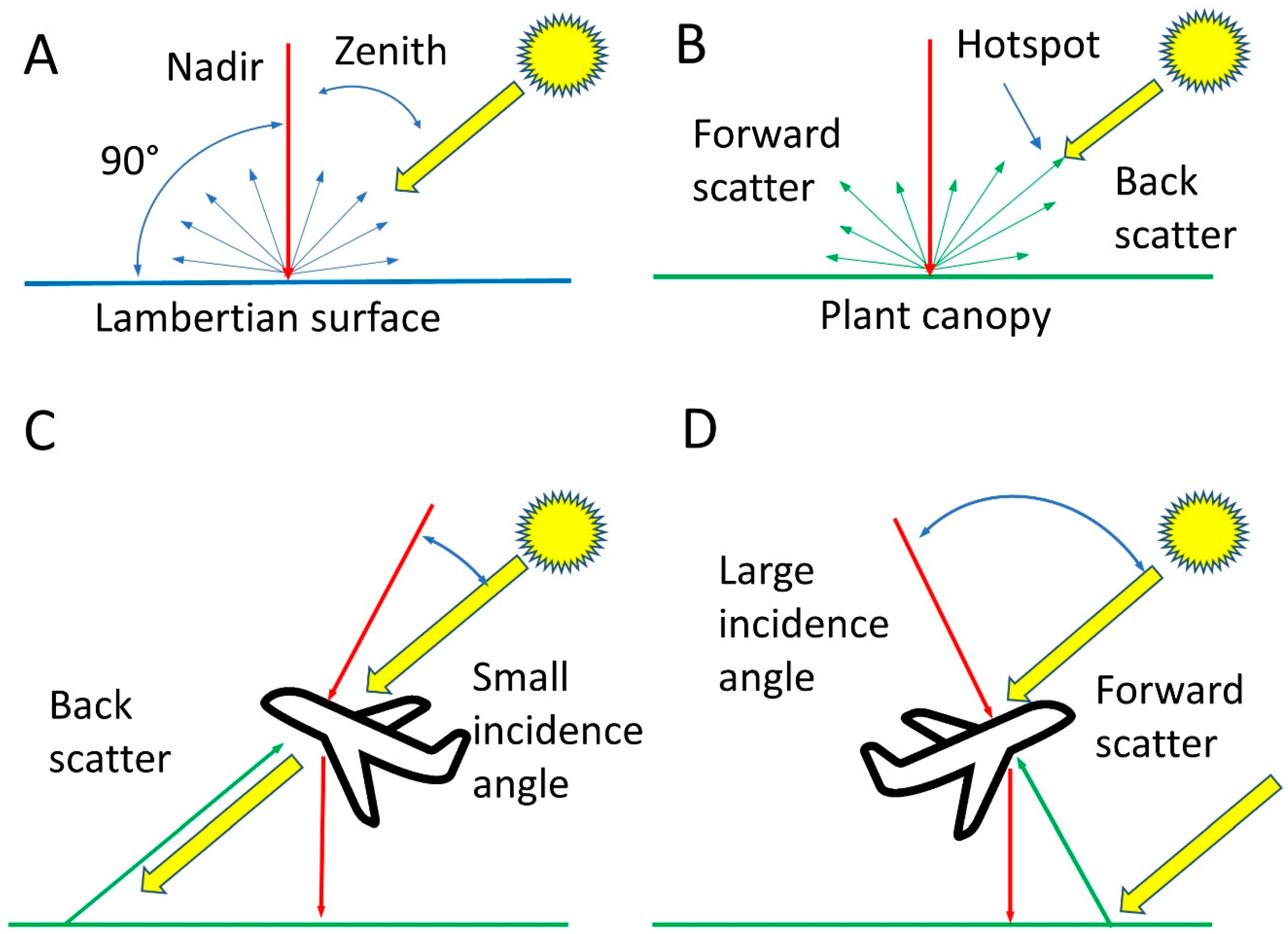
2.2. Effect of ILS Orientation on Retrieved UAS Reflectance
2.3. Effect of Altitude on Retrieved UAS Reflectances
3. Results
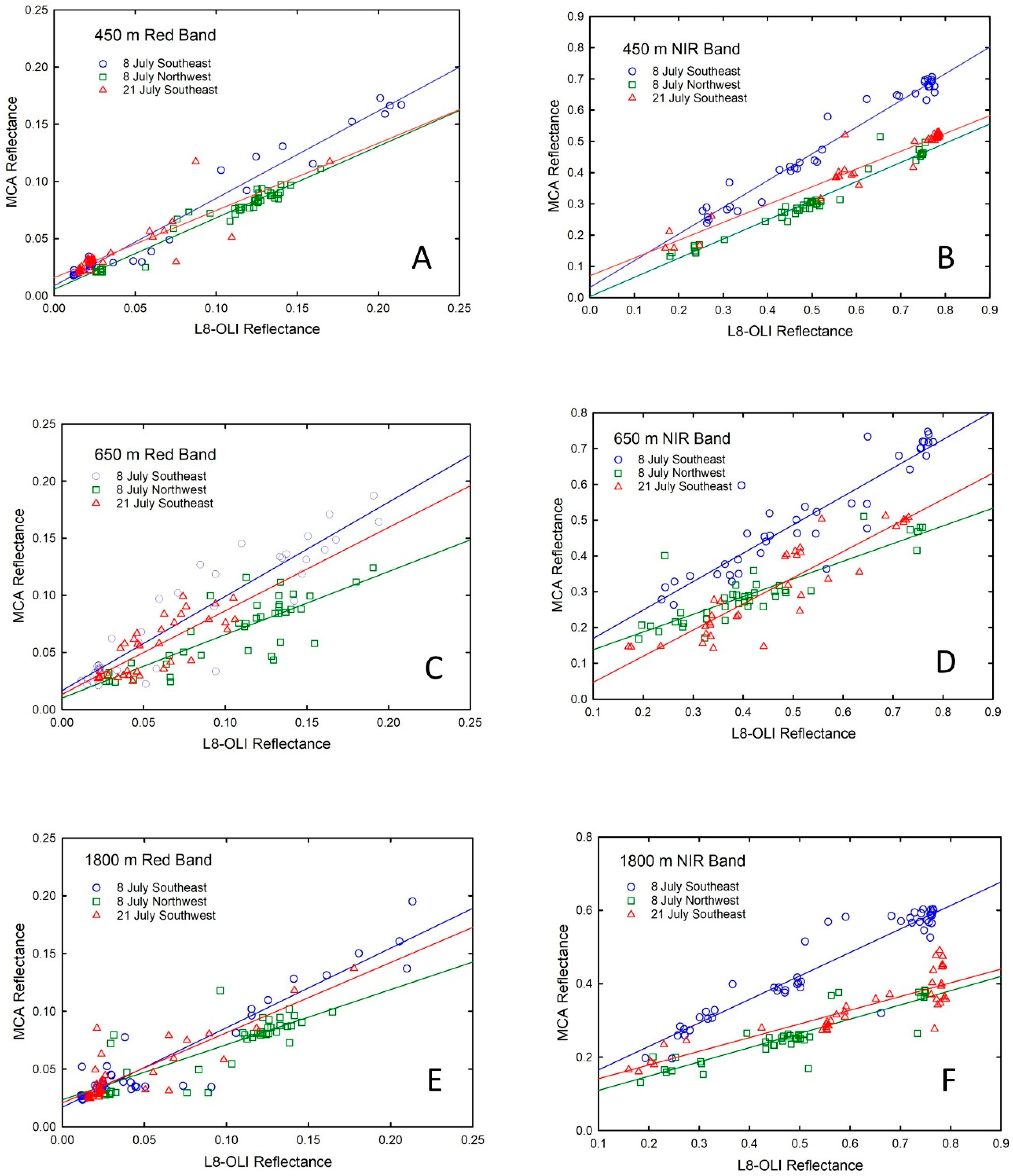
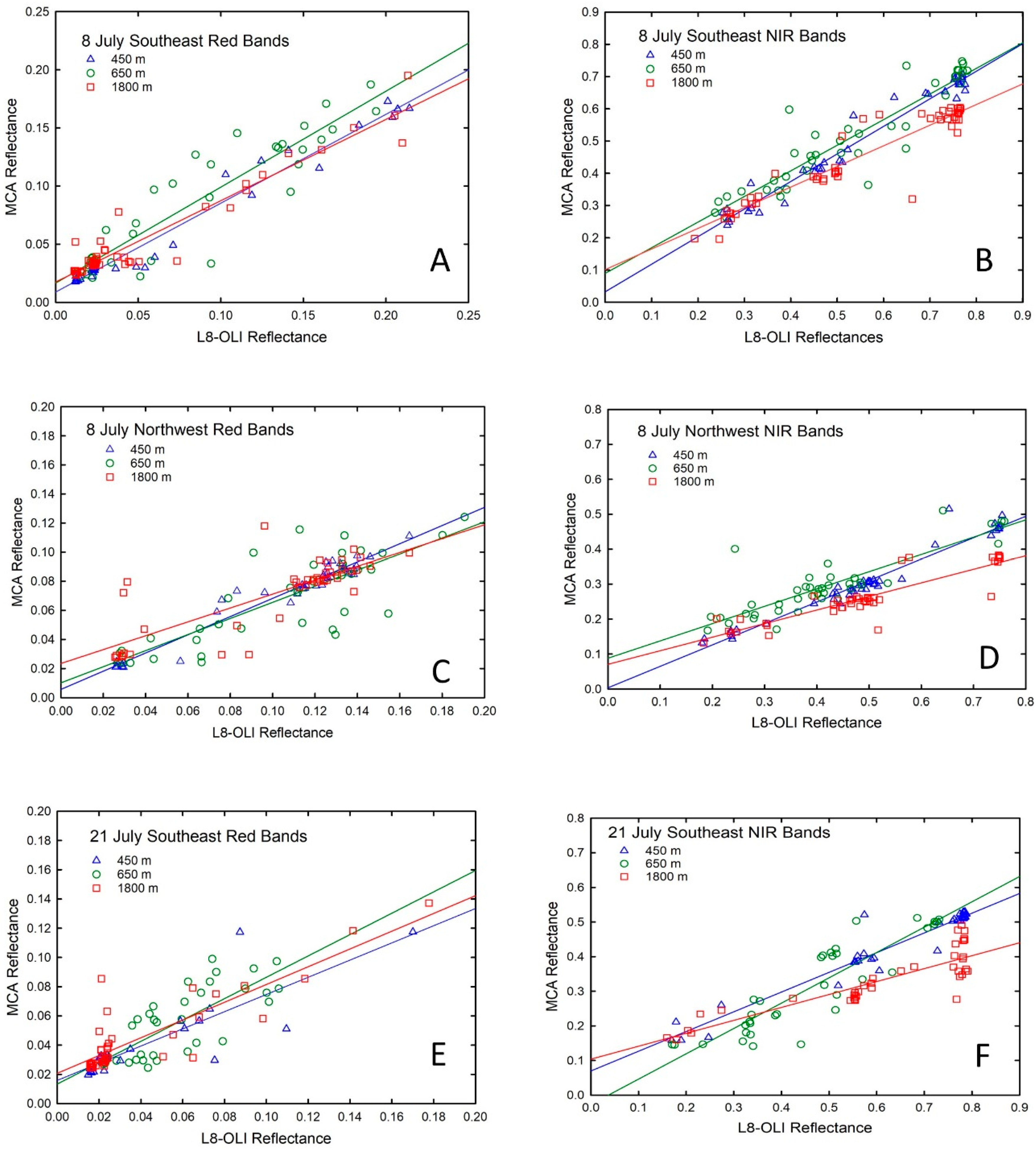
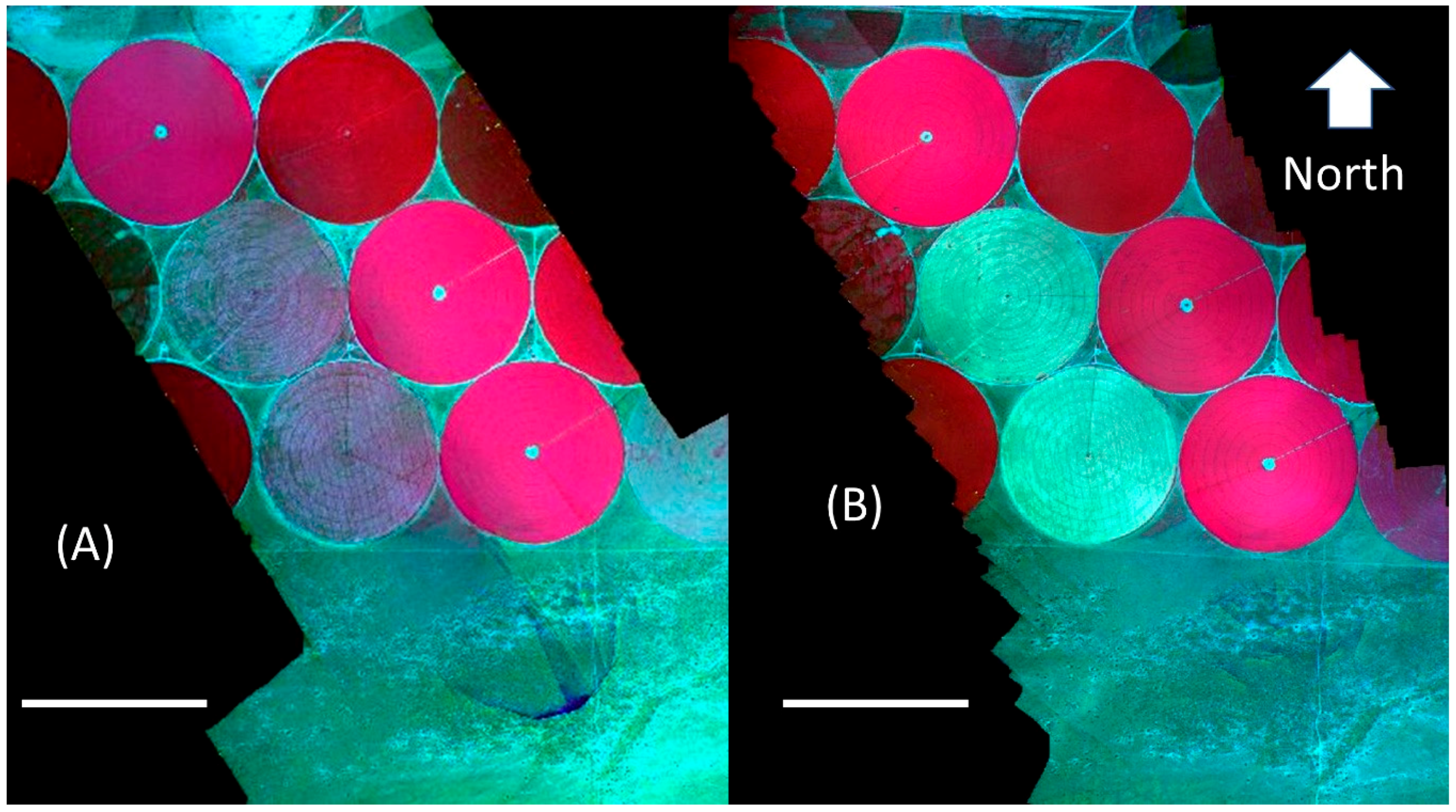
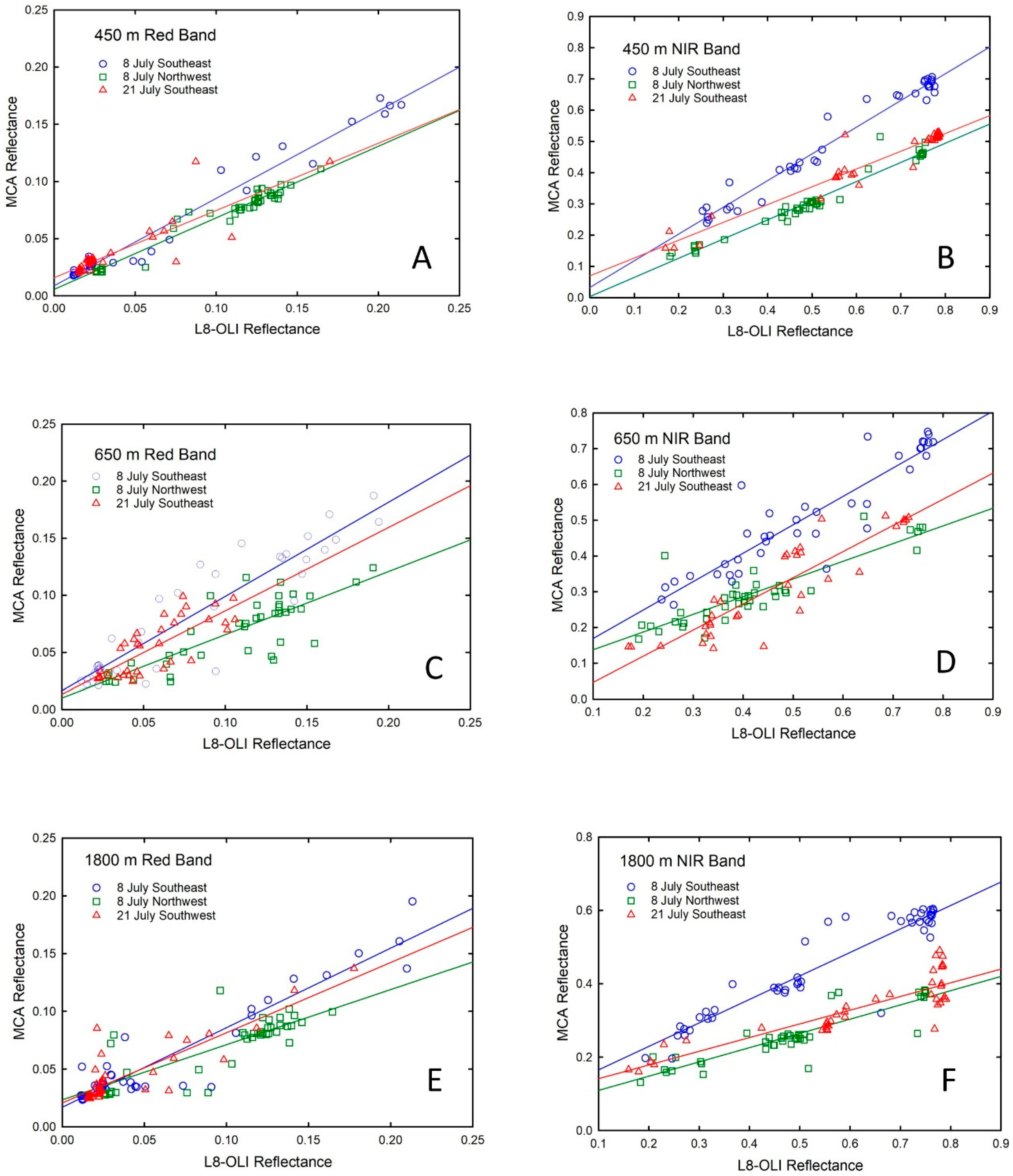
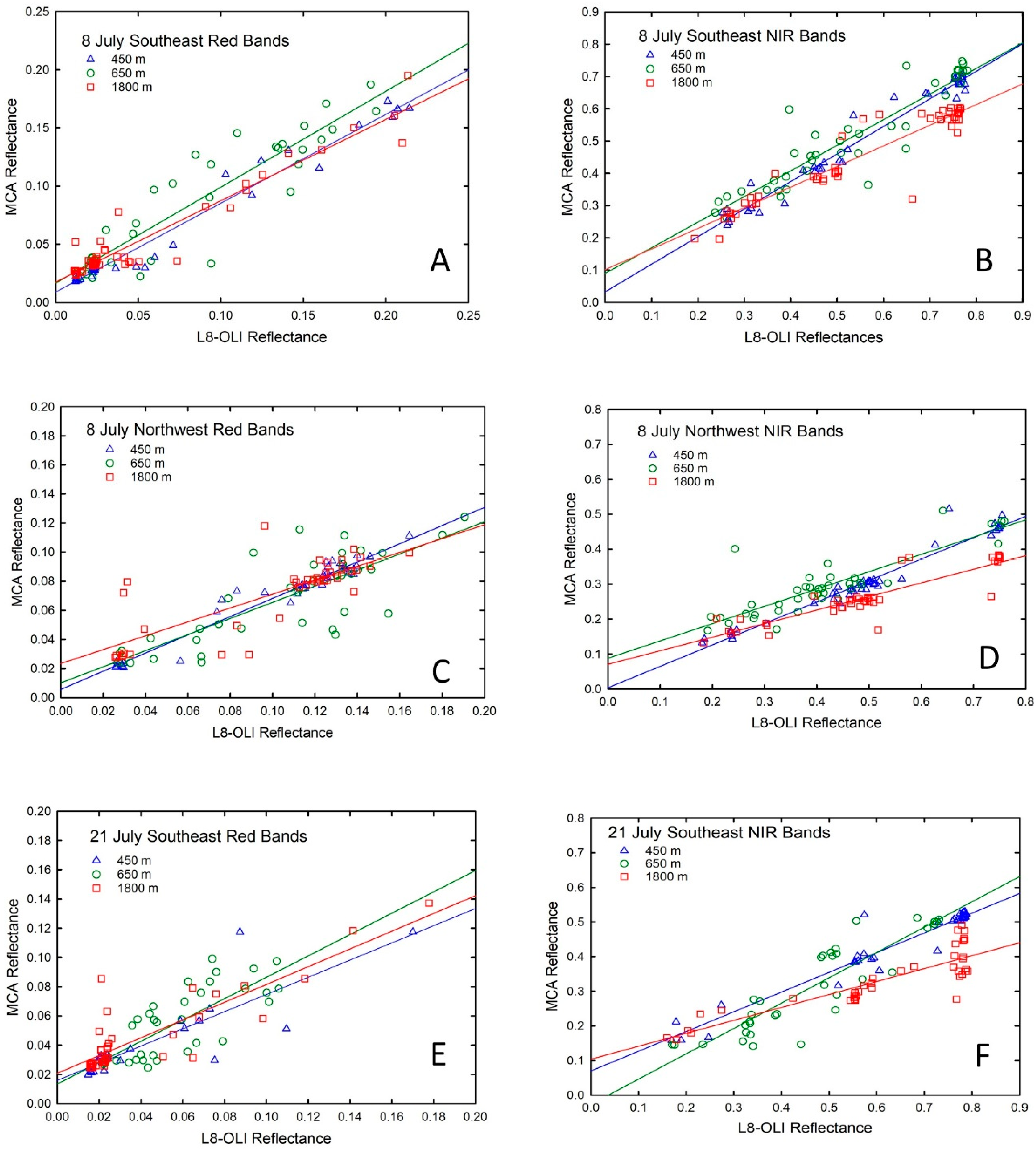
3.1. Effect of Flight Direction
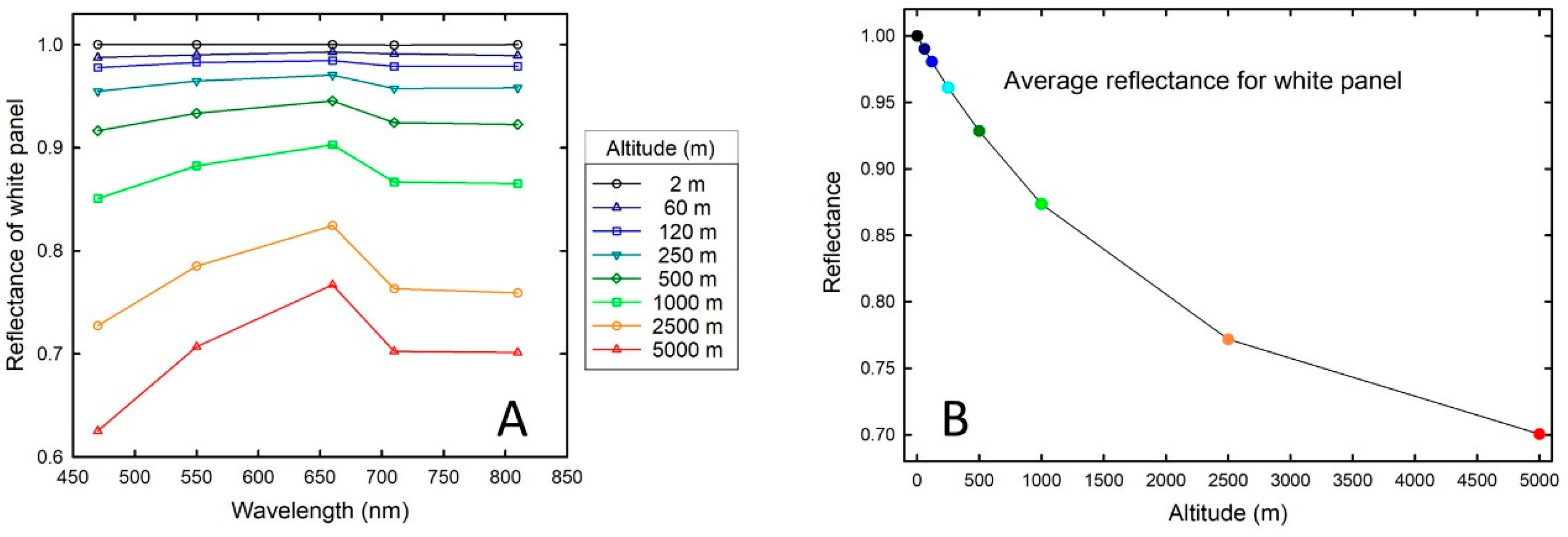
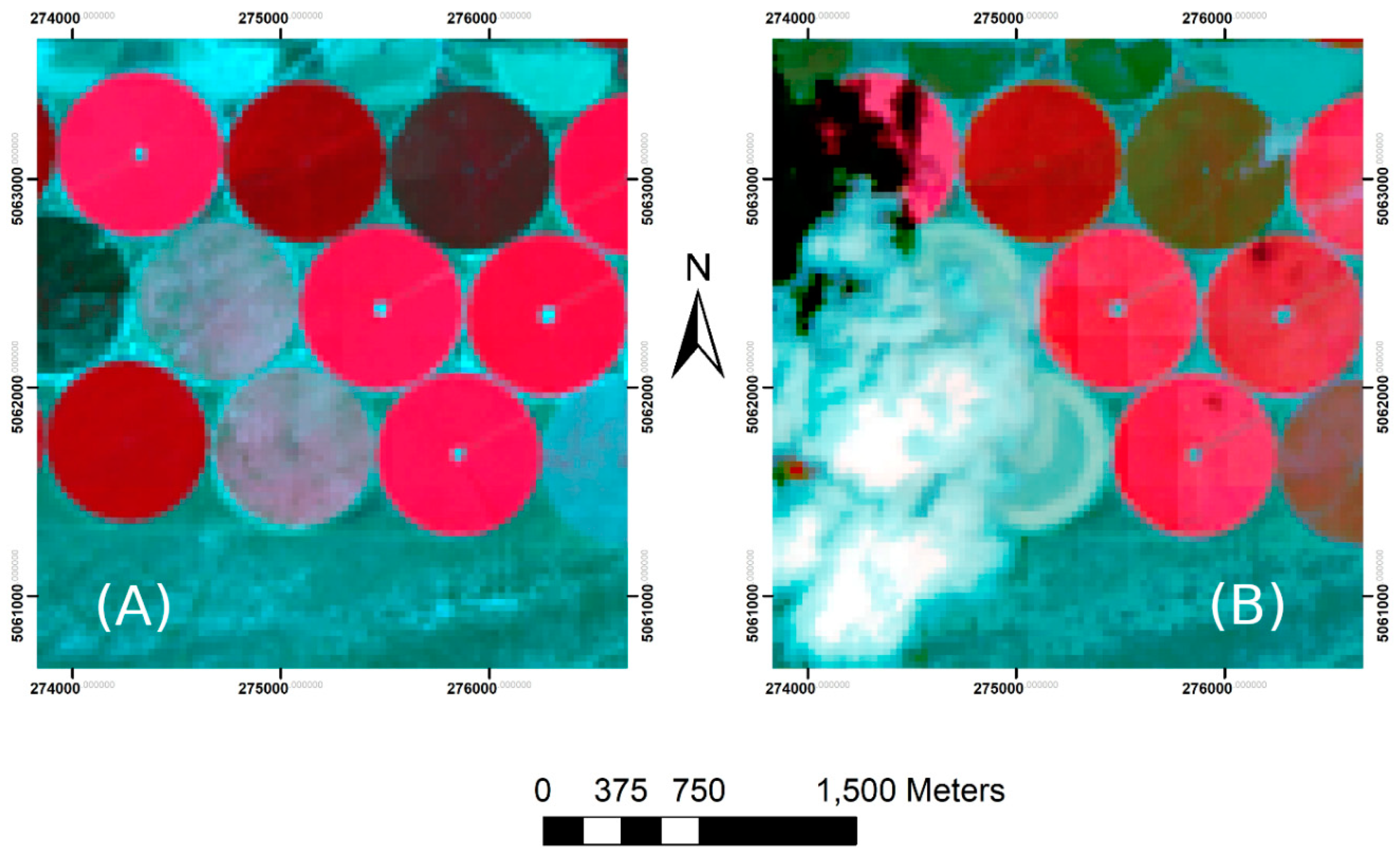
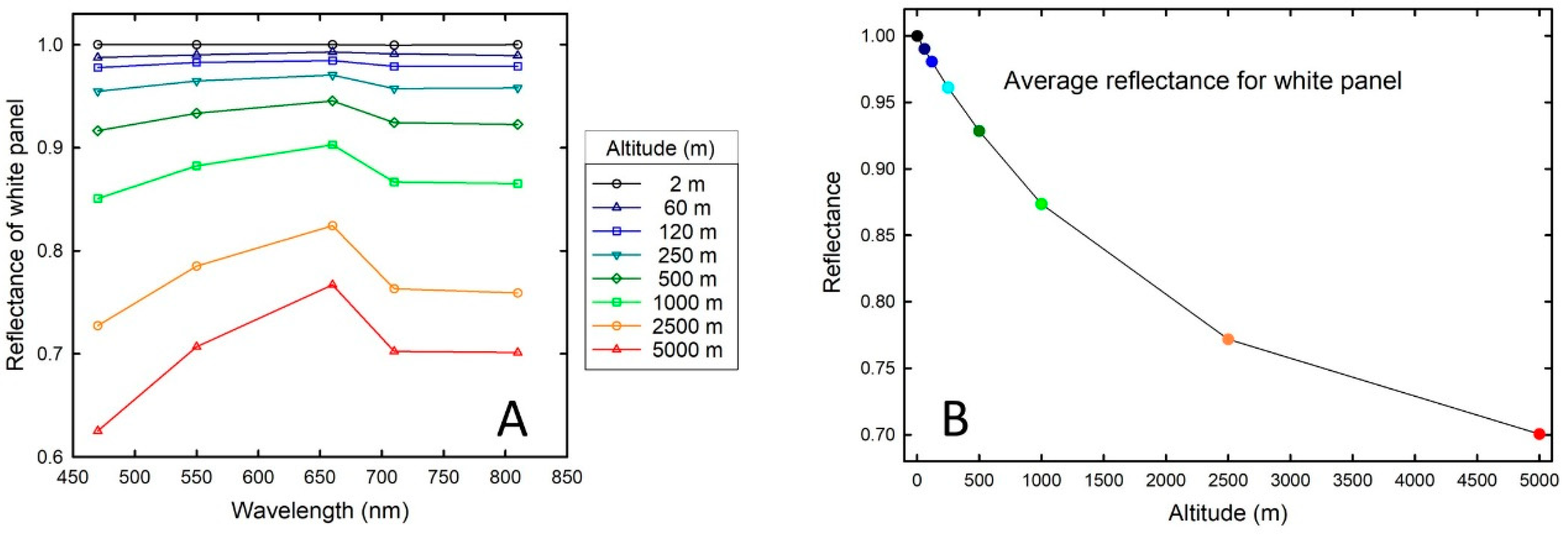
3.2. Effect of Flight Altitude
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Notice
Disclaimer
References
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Hunt, E.R.J.; Daughtry, C.S. What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? Int. J. Remote Sens. 2018, 39, 5345–5376. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant. Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Franceschini, M.H.; Bartholomeus, H.; Van Apeldoorn, D.F.; Suomalainen, J.; Kooistra, L. Feasibility of unmanned aerial vehicle optical imagery for early detection and severity assessment of late blight in potato. Remote Sens. 2019, 11, 224. [Google Scholar] [CrossRef]
- Daughtry, C.S.; Walthall, C.L.; Kim, M.S.; De Colstoun, E.B.; McMurtrey, J.E., III. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Zheng, H.; Li, W.; Jiang, J.; Liu, Y.; Cheng, T.; Tian, Y.; Zhu, Y.; Cao, W.; Zhang, Y.; Yao, X. A comparative assessment of different modeling algorithms for estimating leaf nitrogen content in winter wheat using multispectral images from an unmanned aerial vehicle. Remote Sens. 2018, 10, 2026. [Google Scholar] [CrossRef]
- Hunt, E.R.; Hively, W.D.; Fujikawa, S.; Linden, D.; Daughtry, C.S.; McCarty, G. Acquisition of NIR-green-blue digital photographs from unmanned aircraft for crop monitoring. Remote Sens. 2010, 2, 290–305. [Google Scholar] [CrossRef]
- Kelcey, J.; Lucieer, A. Sensor correction of a 6-band multispectral imaging sensor for UAV remote sensing. Remote Sens. 2012, 4, 1462–1493. [Google Scholar] [CrossRef]
- Mamaghani, B.G.; Sasaki, G.V.; Connal, R.J.; Kha, K.; Knappen, J.S.; Hartzell, R.A.; Marcellus, E.D.; Bauch, T.D.; Raqueño, N.G.; Salvaggio, C. An initial exploration of vicarious and in-scene calibration techniques for small unmanned aircraft systems. In Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping III; Thomasson, J.A., McKee, M., Moorhead, R.J., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2018. [Google Scholar] [CrossRef]
- Cao, S.; Danielson, B.; Clare, S.; Koenig, S.; Campos-Vargas, C.; Sanchez-Azofeifa, A. Radiometric calibration assessments for UAS-borne multispectral cameras: Laboratory and field protocols. ISPRS J. Photogram. Remote Sens. 2019, 149, 132–145. [Google Scholar] [CrossRef]
- Edwards, J.; Anderson, J.; Shuart, W.; Woolard, J. An evaluation of reflectance calibration methods for UAV spectral imagery. Photogram. Eng. Remote Sens. 2019, 85, 221–230. [Google Scholar] [CrossRef]
- Jiang, J.; Zheng, H.; Ji, X.; Cheng, T.; Tian, Y.; Zhu, Y.; Cao, W.; Ehsani, R.; Yao, X. Analysis and evaluation of the image preprocessing process of a six-band multispectral camera mounted on an unmanned aerial vehicle for winter wheat monitoring. Sensors 2019, 19, 747. [Google Scholar] [CrossRef] [PubMed]
- Roosjen, P.; Suomalainen, J.; Bartholomeus, H.; Kooistra, L.; Clevers, J. Mapping reflectance anisotropy of a potato canopy using aerial images acquired with an unmanned aerial vehicle. Remote Sens. 2017, 9, 417. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Honkavaara, E.; Khoramshahi, E. Radiometric correction of close-range spectral image blocks captured using an unmanned aerial vehicle with a radiometric block adjustment. Remote Sens. 2018, 10, 256. [Google Scholar] [CrossRef]
- Tu, Y.H.; Phinn, S.; Johansen, K.; Robson, A. Assessing radiometric correction approaches for multi-spectral UAS imagery for horticultural applications. Remote Sens. 2018, 10, 1684. [Google Scholar] [CrossRef]
- Stow, D.; Nichol, C.J.; Wade, T.; Assmann, J.J.; Simpson, G.; Helfter, C. Illumination geometry and flying height influence surface reflectance and NDVI derived from multispectral UAS imagery. Drones 2019, 3, 55. [Google Scholar] [CrossRef]
- Hakala, T.; Honkavaara, E.; Saari, H.; Mäkynen, J.; Kaivosoja, J.; Pesonen, L.; Pölönen, I. Spectral imaging from UAVs under varying illumination conditions. Int. Arch. Photogramm. Remote Sens. Spatial Infor. Sci. 2013, XL-1/W2, 189–194. [Google Scholar] [CrossRef]
- Hakala, T.; Markelin, L.; Honkavaara, E.; Scott, B.; Theocharous, T.; Nevalainen, O.; Näsi, R.; Suomalainen, J.; Viljanen, N.; Greenwell, C.; et al. Direct reflectance measurements from drones: Sensor absolute radiometric calibration and system tests for forest reflectance characterization. Sensors 2018, 18, 1417. [Google Scholar] [CrossRef]
- Suomalainen, J.; Hakala, T.; Alves de Oliveira, R.; Markelin, L.; Viljanen, N.; Näsi, R.; Honkavaara, E. A novel tilt correction technique for irradiance sensors and spectrometers on-board unmanned aerial vehicles. Remote Sens. 2018, 10, 2068. [Google Scholar] [CrossRef]
- Yu, X.; Liu, Q.; Liu, X.; Liu, X.Y.; Wang, Y. A physical-based atmospheric correction algorithm of unmanned aerial vehicles images and its utility analysis. Int. J. Remote Sens. 2017, 38, 3101–3112. [Google Scholar] [CrossRef]
- FAA. Integration of Civil Unmanned Aircraft Systems (UAS) in the National Airspace System (NAS) Roadmap, 2nd ed.; Federal Aviation Administration: Washington, DC, USA, 2018. Available online: https://www.faa.gov/uas/resources/policy_library/second_edition_integration_of_civil_UAS_NAS_roadmap_July 2018.pdf (accessed on 27 September 2019).
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned aircraft systems in remote sensing and scientific research: Classification and considerations of use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Boryan, C.; Yang, Z.; Mueller, R.; Craig, M. Monitoring US agriculture: The US Department of Agriculture, National Agricultural Statistics Service, Cropland Data Layer Program. Geocarto Int. 2011, 26, 341–358. [Google Scholar] [CrossRef]
- Heinold, S. Radiometric Multi-Spectral or Hyperspectral Camera Array Using Matched Area Sensors and a Calibrated Ambient Light Collection Device. U.S. Patent 2014 0022381 A1, 23 January 2014. [Google Scholar]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef]
- Markham, B.; Barsi, J.; Kvaran, G.; Ong, L.; Kaita, E.; Biggar, S.; Czapla-Myers, J.; Mishra, N.; Helder, D. Landsat-8 operational land imager radiometric calibration and stability. Remote Sens. 2014, 6, 12275–12308. [Google Scholar] [CrossRef]
- Czapla-Myers, J.; McCorkel, J.; Anderson, N.; Thome, K.; Biggar, S.; Helder, D.; Aaron, D.; Leigh, L.; Mishra, N. The ground-based absolute radiometric calibration of Landsat 8 OLI. Remote Sens. 2015, 7, 600–626. [Google Scholar] [CrossRef]
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; van den Bosch, J. MODTRAN© 6: A major upgrade of the MODTRAN radiative transfer code. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XX, Proceedings of the SPIE 9088, Bellingham, WA, USA, 23–27 February 2014; Velez-Reyes, M., Kruse, F.A., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2014; p. 90880H. [Google Scholar] [CrossRef]
- Adler-Golden, S.M.; Matthew, M.W.; Bernstein, L.S.; Levine, R.Y.; Berk, A.; Richtsmeier, S.C.; Acharya, P.K.; Anderson, G.P.; Felde, G.; Gardner, J.; et al. Atmospheric Correction for Short-wave Spectral Imagery Based on MODTRAN4. In Imaging Spectrometry V, Proceedings of the SPIE 3753; Descour, M.R., Shen, S.S., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 1999; pp. 61–69. [Google Scholar] [CrossRef]
- Hill, T.; Lewicki, P. Statistics Methods and Applications; StatSoft: Tulsa, OK, USA, 2006; pp. 48–49. [Google Scholar]
- Zhao, F.; Li, Y.; Dai, X.; Verhoef, W.; Guo, Y.; Shang, H.; Gu, X.; Huang, Y.; Yu, T.; Huang, J. Simulated impact of sensor field of view and distance on field measurements of bidirectional reflectance factors for row crops. Remote Sens. Environ. 2015, 156, 129–142. [Google Scholar] [CrossRef]
- Walthall, C.L.; Halthore, R.N.; Loechel, S.E.; Elman, G.C.; Markham, B.L. Measuring aerosol optical thickness with a helicopter-based sunphotometer. IEEE Ts. Geosci. Remote Sens. 2000, 38, 1410–1416. [Google Scholar] [CrossRef]
- Roberts, D.A.; Yamaguchi, Y.; Lyon, R.J.P. Comparison of various techniques for calibration of AIS data. In JPL Proceedings of Second Airborne Imaging Spectrometer Data Analysis Workshop; Vane, G., Goetz, A.F.H., Eds.; Jet Propulsion Laboratory: Pasadena, CA, USA, 1986; JPL publication 86–35; pp. 21–30. [Google Scholar]
- Smith, G.M.; Milton, E.J. The use of the empirical line method to calibrate remotely sensed data to reflectance. Int. J. Remote Sens. 1999, 20, 2653–2662. [Google Scholar] [CrossRef]
- Hunt, E.R., Jr.; Cavigelli, M.; Daughtry, C.S.T.; McMurtrey, J., III; Walthall, C.L. Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Baugh, W.M.; Groeneveld, D.P. Empirical proof of the empirical line. Int. J. Remote Sens. 2008, 29, 665–672. [Google Scholar] [CrossRef]
- Wang, C.; Myint, S.W. A simplified empirical line method of radiometric calibration for small unmanned aircraft systems-based remote sensing. IEEE J. Sel. Top. Appl. 2015, 8, 1876–1885. [Google Scholar] [CrossRef]
- Hunt, E.R., Jr.; Horneck, D.A.; Spinelli, C.B.; Turner, R.W.; Bruce, A.E.; Gadler, D.J.; Brungardt, J.J.; Hamm, P.B. Monitoring nitrogen status of potatoes using small unmanned aerial vehicles. Precis. Agric. 2018, 19, 314–333. [Google Scholar] [CrossRef]
- Domenzain, L.M.; Fallet, C. Necessary steps for the systematic calibration of a multispectral imaging system to achieve a targetless workflow in reflectance estimation: A study of Parrot SEQUOIA for precision agriculture. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XXIV, Proceedings of the SPIE 10644, San Jose, CA, USA, 25 February–1 March 2018; Velez-Reyes, M., Messinger, D.W., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 1064416. [Google Scholar] [CrossRef]
- Jacquemoud, S.; Verhoef, W.; Baret, F.; Bacour, C.; Zarco-Tejada, P.J.; Asner, G.P.; François, C.; Ustin, S.L. PROSPECT+ SAIL models: A review of use for vegetation characterization. Remote Sens. Environ. 2009, 113, S56–S66. [Google Scholar] [CrossRef]
- Duan, S.B.; Li, Z.L.; Wu, H.; Tang, B.H.; Ma, L.; Zhao, E.; Li, C. Inversion of the PROSAIL model to estimate leaf area index of maize, potato, and sunflower fields from unmanned aerial vehicle hyperspectral data. Int. J. Appl. Earth Obs. 2014, 26, 12–20. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Mini-MCA | Landsat 8 OLI |
|---|---|---|
| Blue | 460–480 | 450–510 |
| Green | 540–560 | 530–590 |
| Red | 650–670 | 640–670 |
| Red-edge | 700–720 | not present |
| Near-infrared (NIR) | 800–820 | 850–880 |
| Altitude (m) | Ground Sample Distance (mm) | Field of View (ha) | Number of Flight Lines | Front-to-Back Overlap (%) | Side-to-Side Overlap (%) |
|---|---|---|---|---|---|
| 450 | 244 | 7.8 | 16 | 77.8 | 23.8 |
| 650 | 352 | 16.2 | 10 | 84.4 | 25.7 |
| 1800 | 975 | 125 | 2 | 94.8 | 34.2 |
| Wavelength | Field a | Fields d & f | P | |||
|---|---|---|---|---|---|---|
| Rmean | RSD | Rmean | RSD | |||
| 8 July 2014 | 470 | 0.0385 | 0.0027 | 0.0422 | 0.0040 | 0.1335 |
| 550 | 0.0721 | 0.0033 | 0.0831 | 0.0043 | 0.0021 | |
| 660 | 0.0297 | 0.0026 | 0.0379 | 0.0038 | 0.0059 | |
| 710 | 0.1367 | 0.0053 | 0.1811 | 0.0085 | <0.0001 | |
| 810 | 0.3694 | 0.0147 | 0.5784 | 0.0355 | <0.0001 | |
| 21 July 2014 | 470 | 0.0382 | 0.0030 | 0.0414 | 0.0044 | 0.1894 |
| 550 | 0.0698 | 0.0033 | 0.0693 | 0.0077 | 0.4681 | |
| 660 | 0.0339 | 0.0038 | 0.0387 | 0.0055 | 0.1587 | |
| 710 | 0.1602 | 0.0065 | 0.1443 | 0.0156 | 0.0918 | |
| 810 | 0.4319 | 0.0188 | 0.3715 | 0.0362 | 0.0183 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hunt, E.R., Jr.; Stern, A.J. Evaluation of Incident Light Sensors on Unmanned Aircraft for Calculation of Spectral Reflectance. Remote Sens. 2019, 11, 2622. https://doi.org/10.3390/rs11222622
Hunt ER Jr., Stern AJ. Evaluation of Incident Light Sensors on Unmanned Aircraft for Calculation of Spectral Reflectance. Remote Sensing. 2019; 11(22):2622. https://doi.org/10.3390/rs11222622
Chicago/Turabian StyleHunt, E. Raymond, Jr., and Alan J. Stern. 2019. "Evaluation of Incident Light Sensors on Unmanned Aircraft for Calculation of Spectral Reflectance" Remote Sensing 11, no. 22: 2622. https://doi.org/10.3390/rs11222622
APA StyleHunt, E. R., Jr., & Stern, A. J. (2019). Evaluation of Incident Light Sensors on Unmanned Aircraft for Calculation of Spectral Reflectance. Remote Sensing, 11(22), 2622. https://doi.org/10.3390/rs11222622