Railway Ballast Monitoring by GPR: A Test-Site Investigation




Abstract
:
1. Introduction
2. Materials and Methods
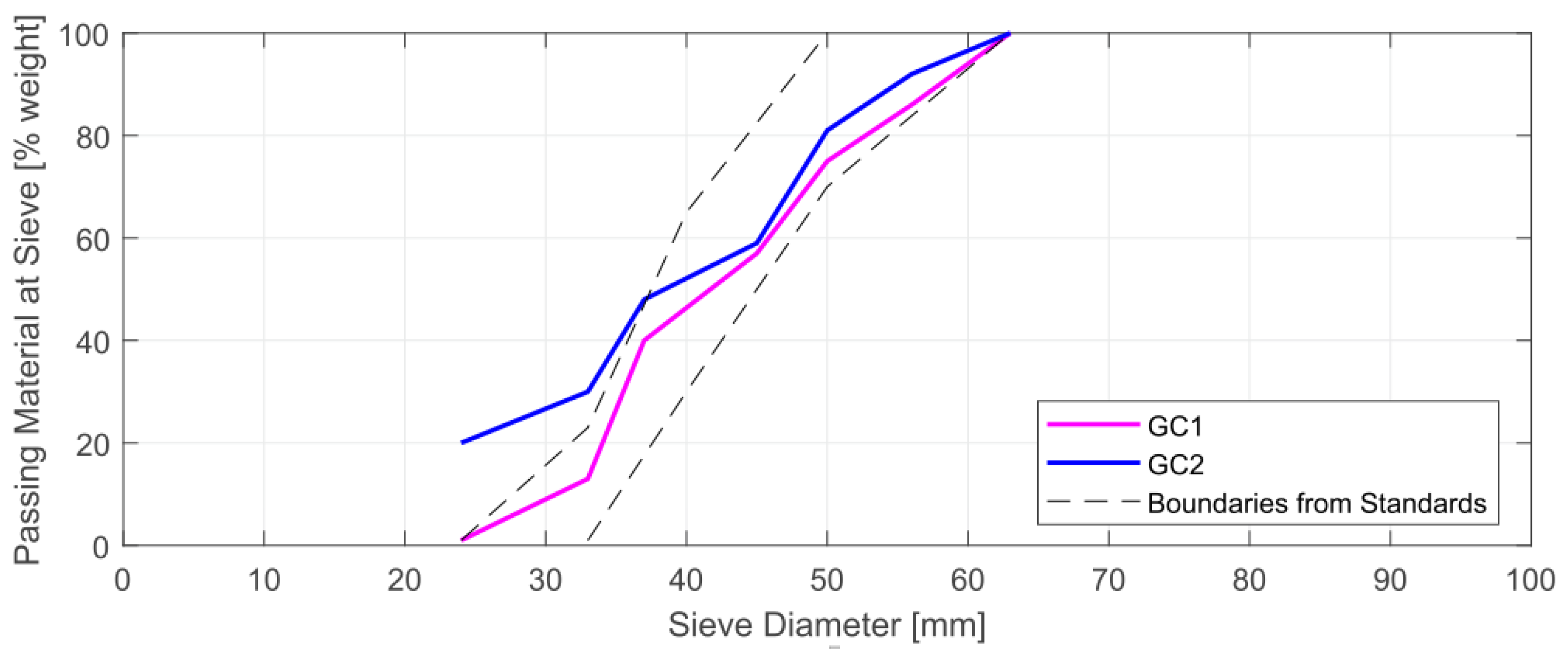
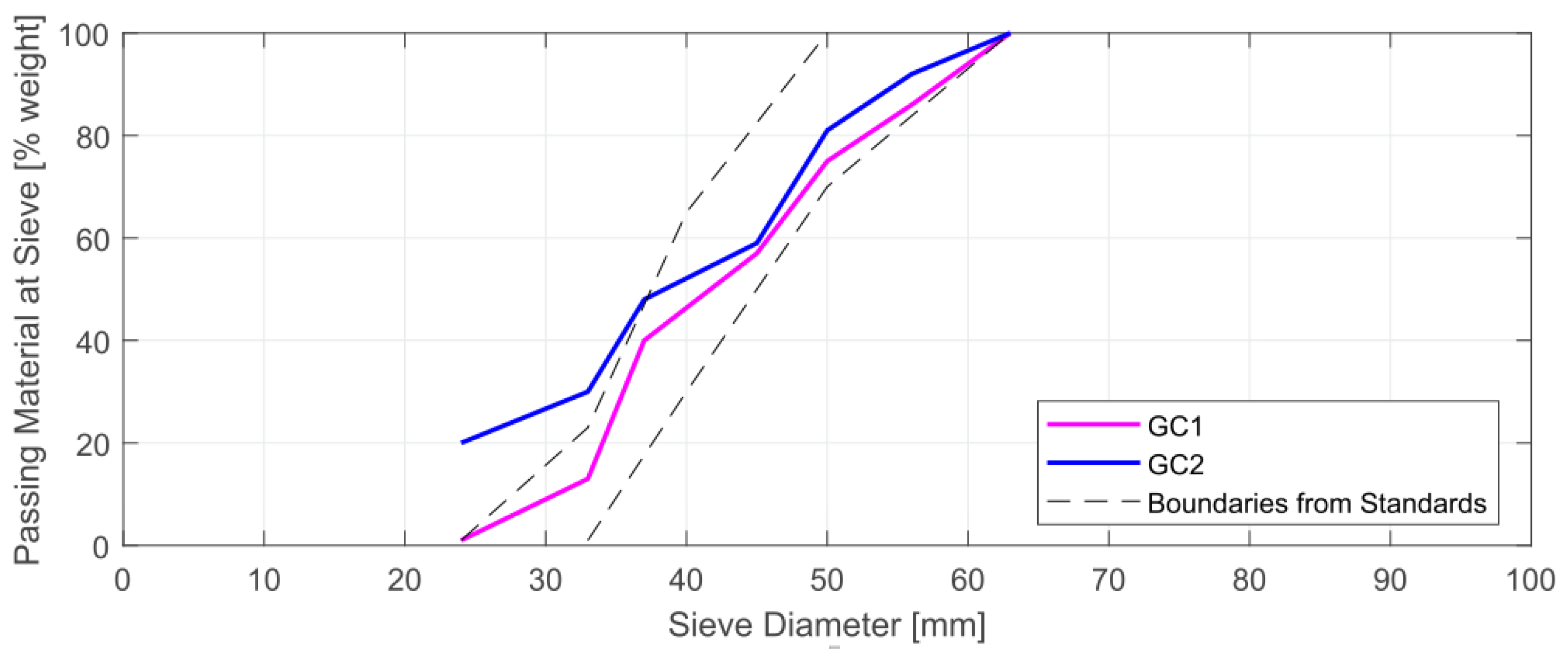
2.1. Inspected Material
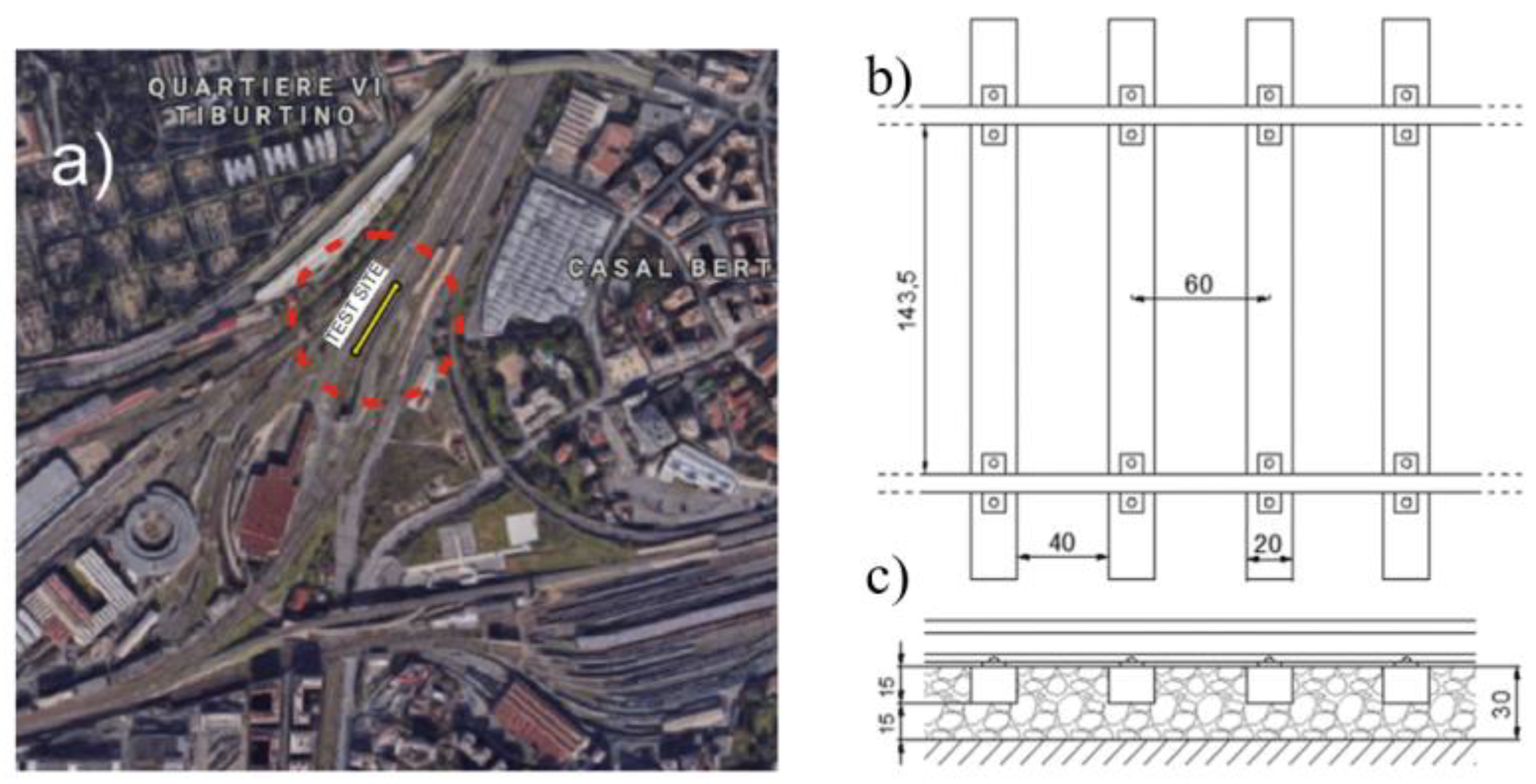
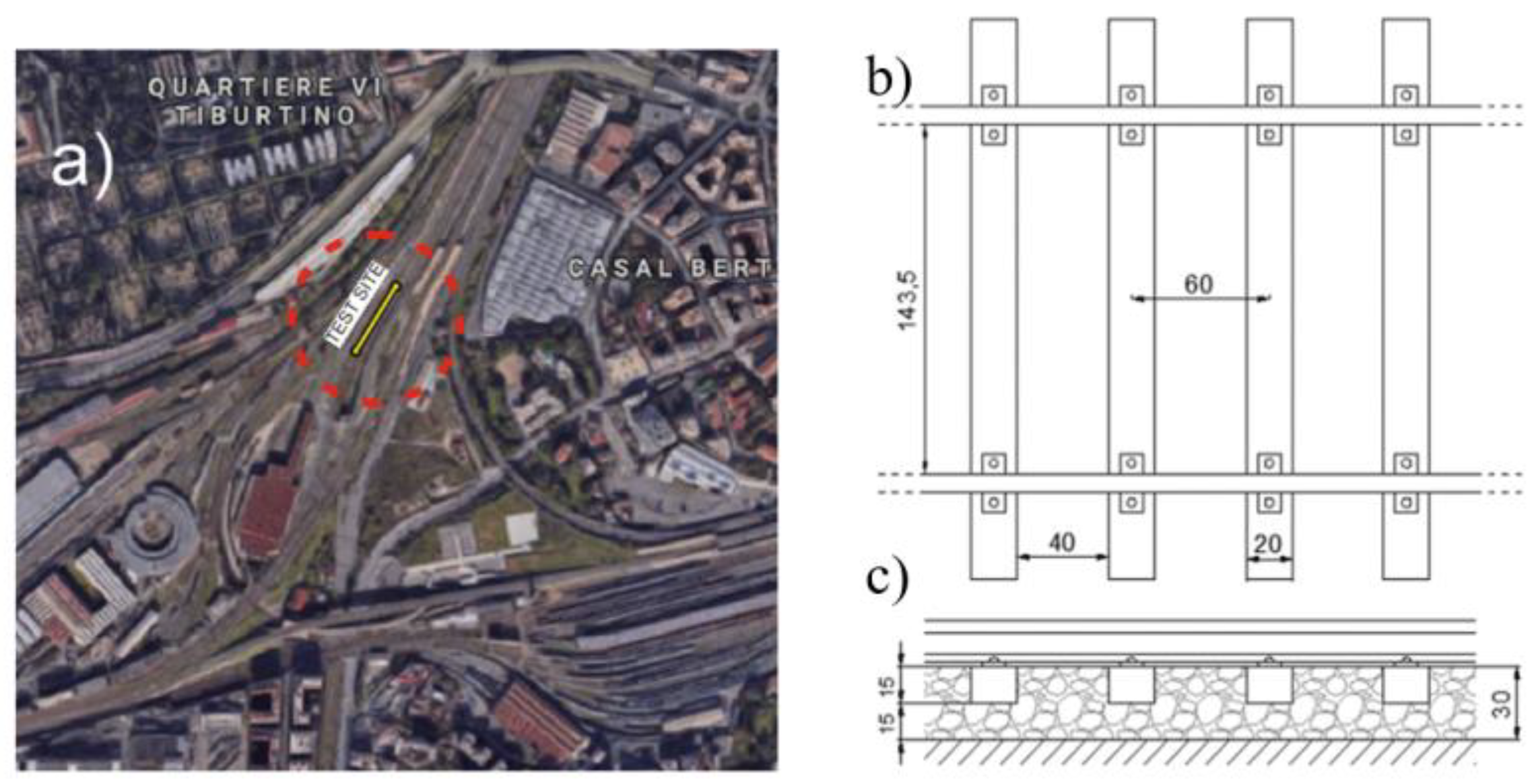
2.2. Test-Site Preparation
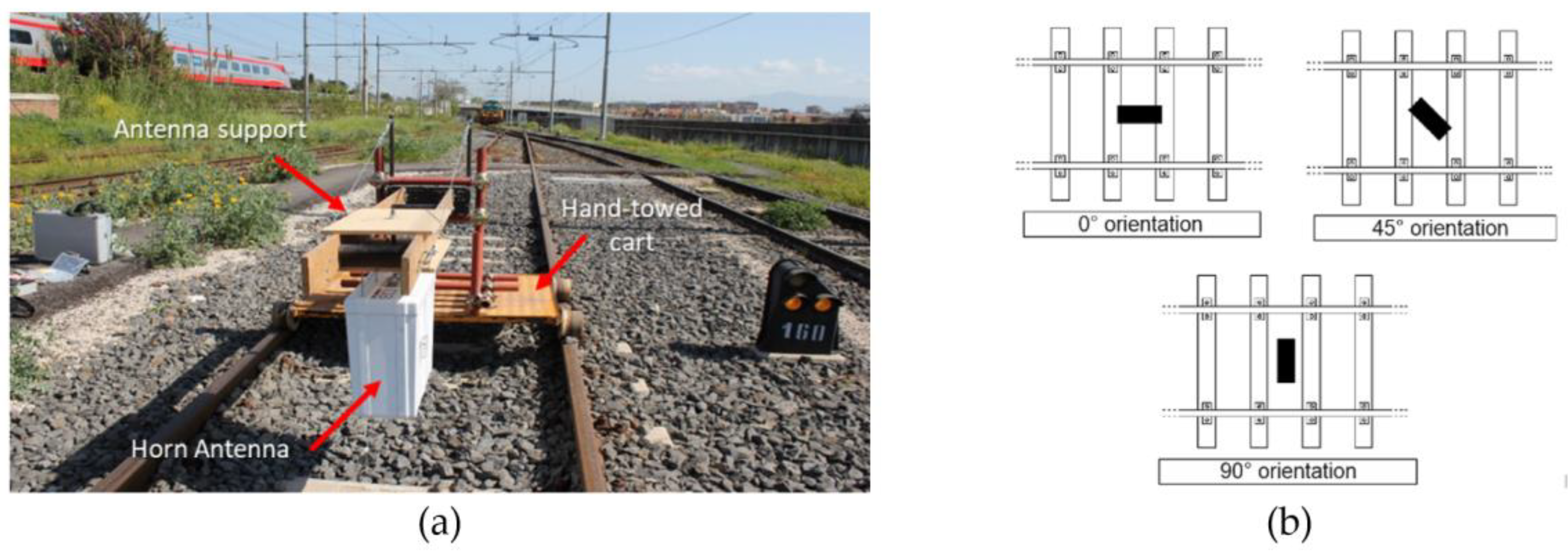
2.3. Test Equipment
2.4. Survey Protocol
2.5. Data Processing
- Time-zero correction: for inspections conducted with an air-coupled antenna, direct wave arrival times (time-zero) are not horizontally aligned along the main longitudinal scanning direction, due to the bouncing of the antenna support. This causes a variation of the default height of the antenna along the inspection length. Accordingly, the air layer between the signal source and the surface is removed in order to set a common starting time for each trace.
- De-wow: typically, GPR sections show strong lower frequency harmonics (“wow”) or initial direct current offsets (Direct Current (DC) shift, DC offset or DC bias), which might cover actual EM reflections. In fact, these harmonics tend to distort the average amplitude of the GPR trace towards values different from zero. De-wow is a stationary low-pass filter that suppresses harmonics with a dominant frequency usually lower than a specific threshold below the Nyquist frequency of the GPR signal. In the present study, suppression frequencies of 250 MHz and 500 MHz were adopted for the 1000 MHz and the 2000 MHz antennas, respectively.
- Background removal: the signal ringing inner to the antenna produces nearly-perfect horizontal reflections that might mask actual reflections from real targets and produce unreliable results. Elements surrounding the test-site, such as electricity cables, mobile phones, etc., may generate these horizontal-like reflections. This occurrence is generally referred to as the “background noise”. To suppress these artifacts from the signal, the average GPR trace calculated using all the traces in the section is subtracted to every GPR trace, sample by sample.
- Band-pass filtering: the signal-to-noise (SNR) ratio in GPR sections is usually lowered by the noise due to the surrounding media and by the inherent loss of the GPR signal, especially at relatively late arrivals. These noise components are generally found to be outside the main working frequency bandwidth of a GPR system. The band-pass filter works by cutting off these side bands from the collected spectrum.
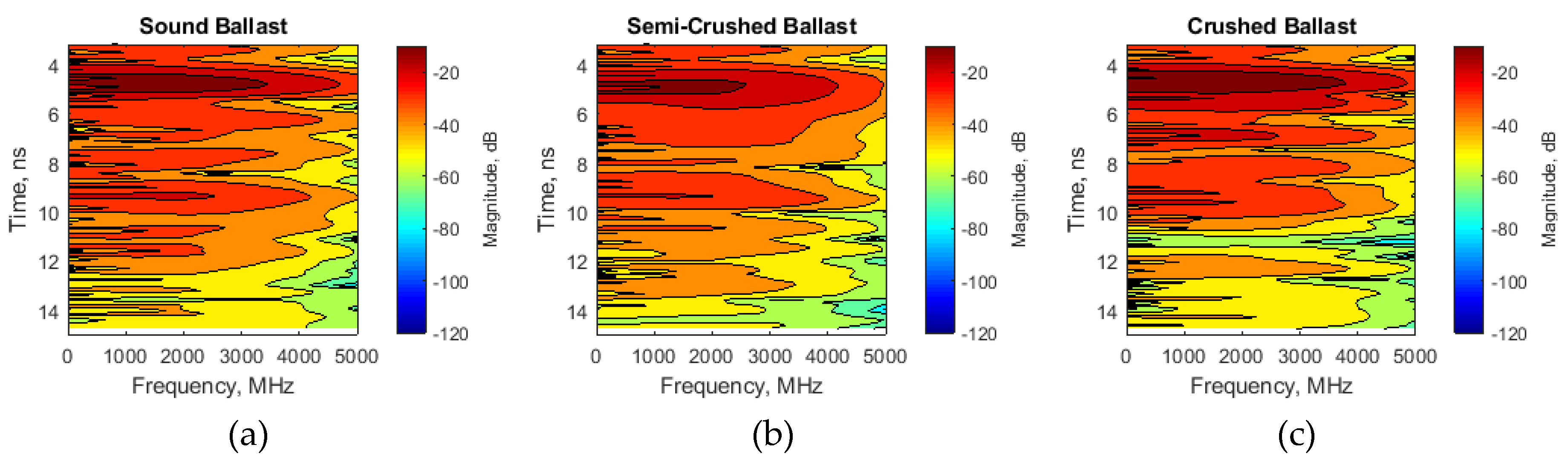
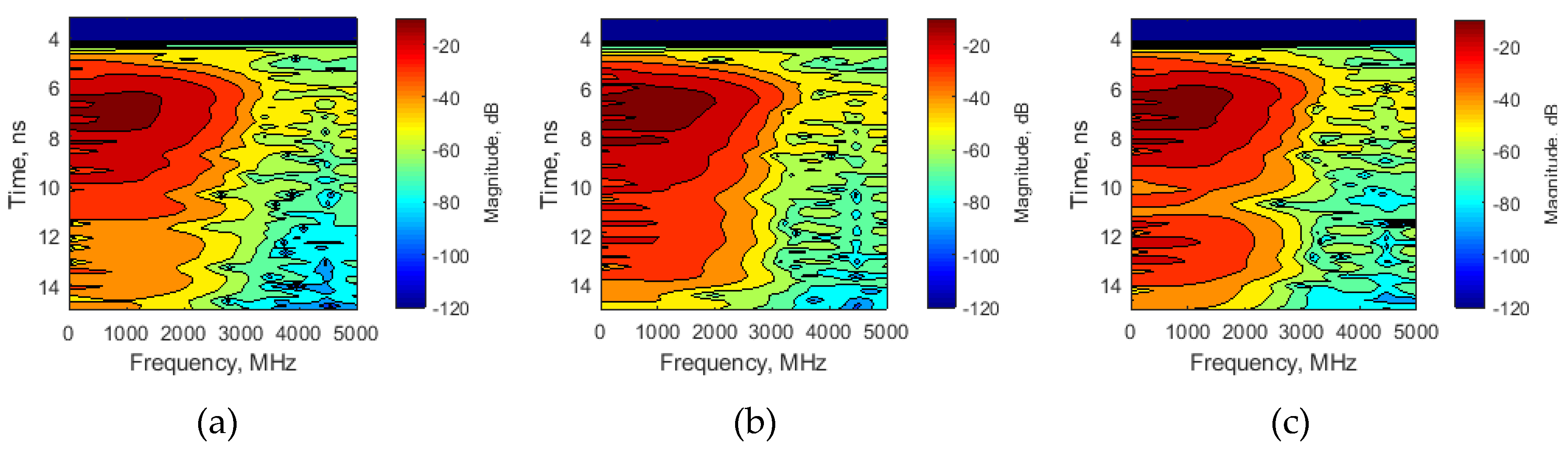
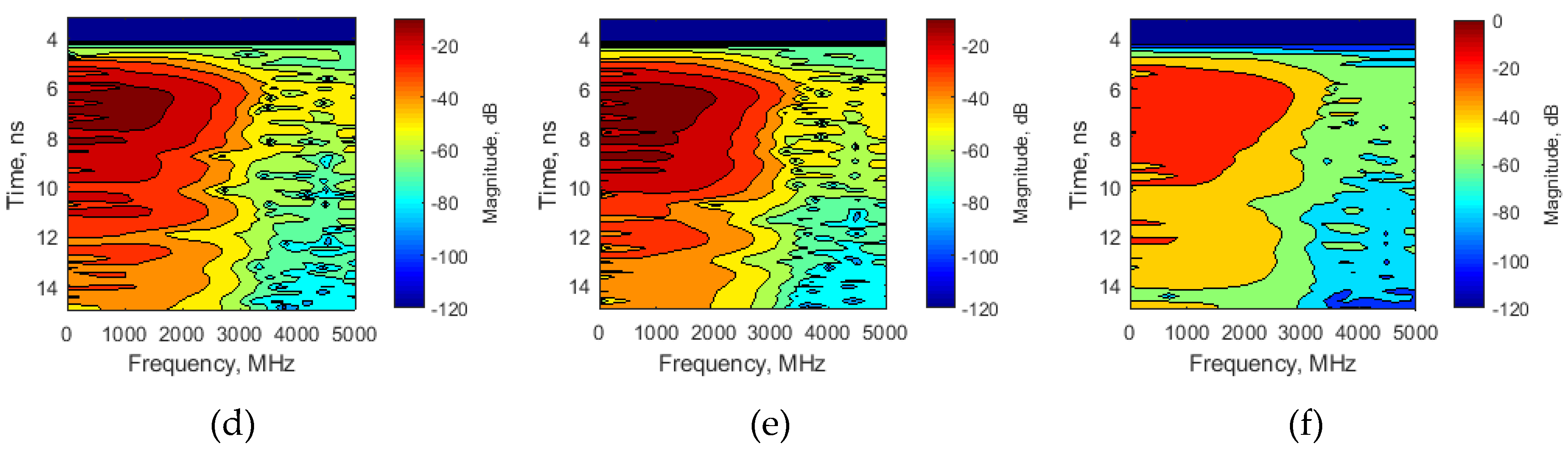
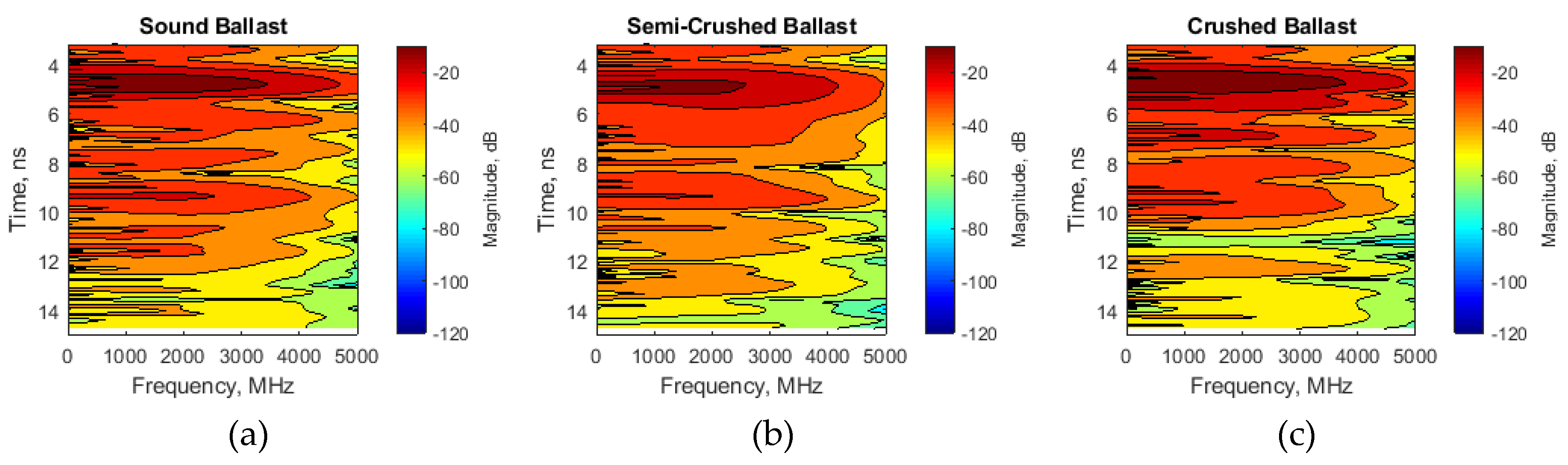
- Short-time Fourier transform (STFT): the application of this method allows keeping data information in both time and frequency domain, by tracking the change of frequency spectrum with time (or depth). Such an information is obtained as follows:where x is the reflected amplitude, t is the time, ω is the radial frequency, w is the window function and STFT is the frequency energy at time t and frequency ω. Values of w equal to 0.12 ns and 0.20 ns were adopted in this study for processing the 1000 MHz and 2000 MHz datasets, respectively.
3. Results and Discussion
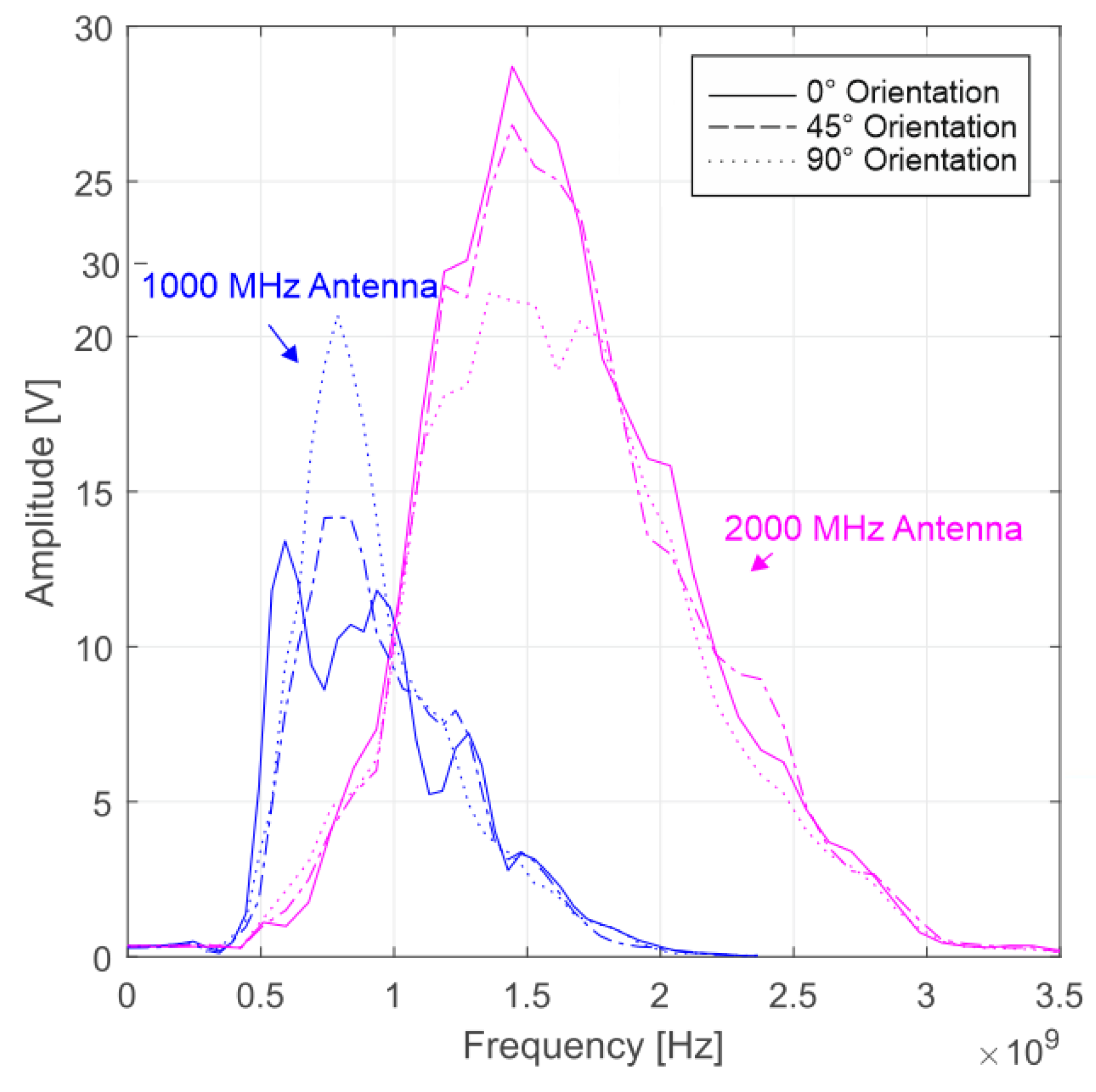
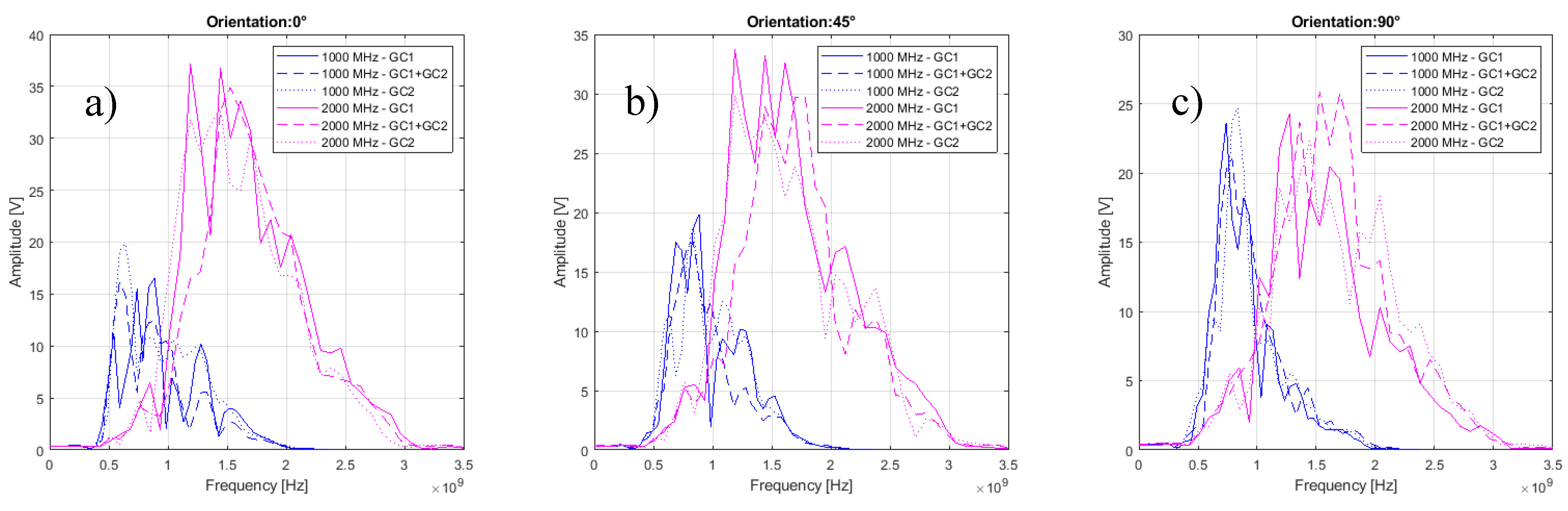
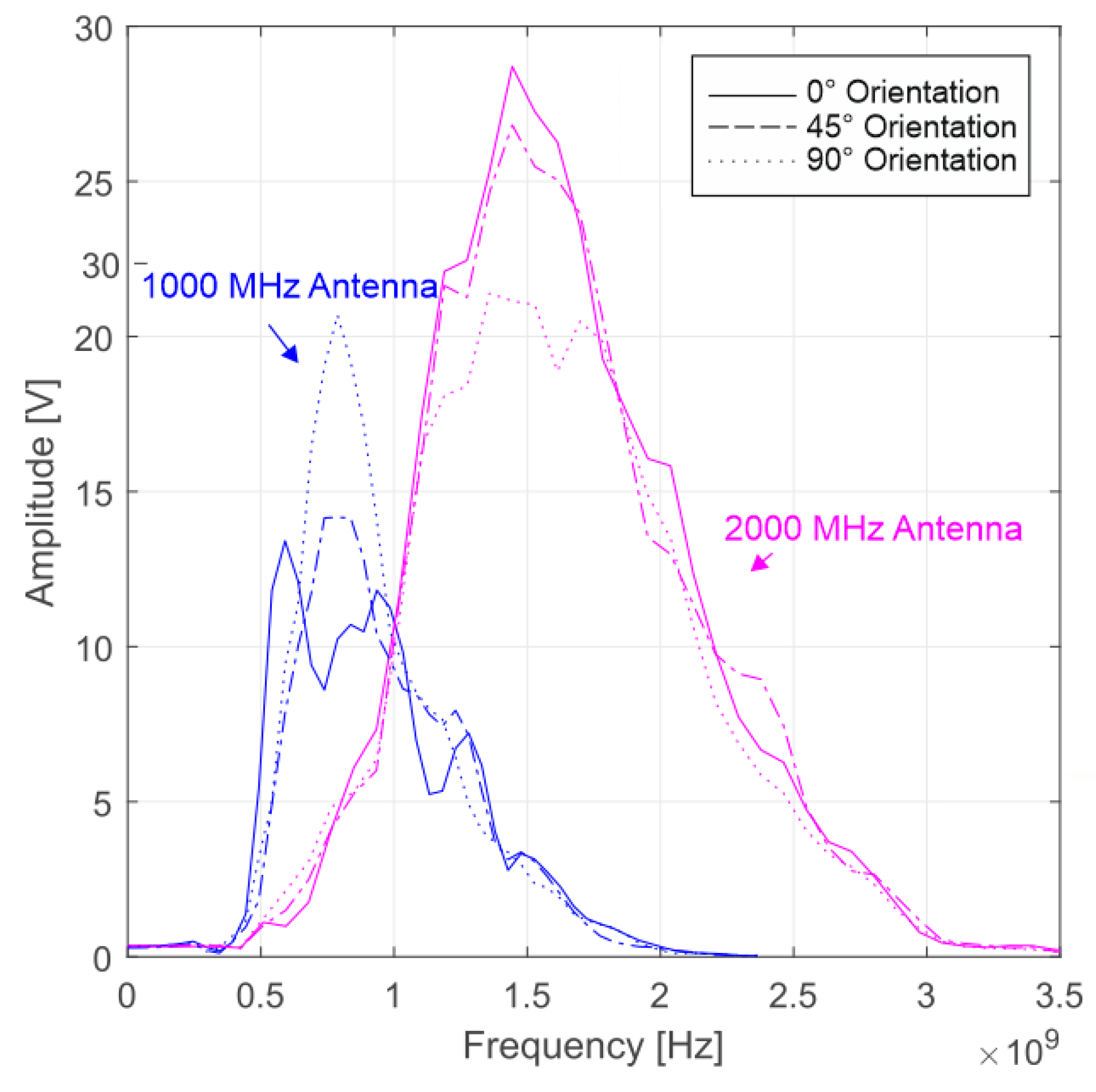
3.1. Influence of the Antenna Orientation
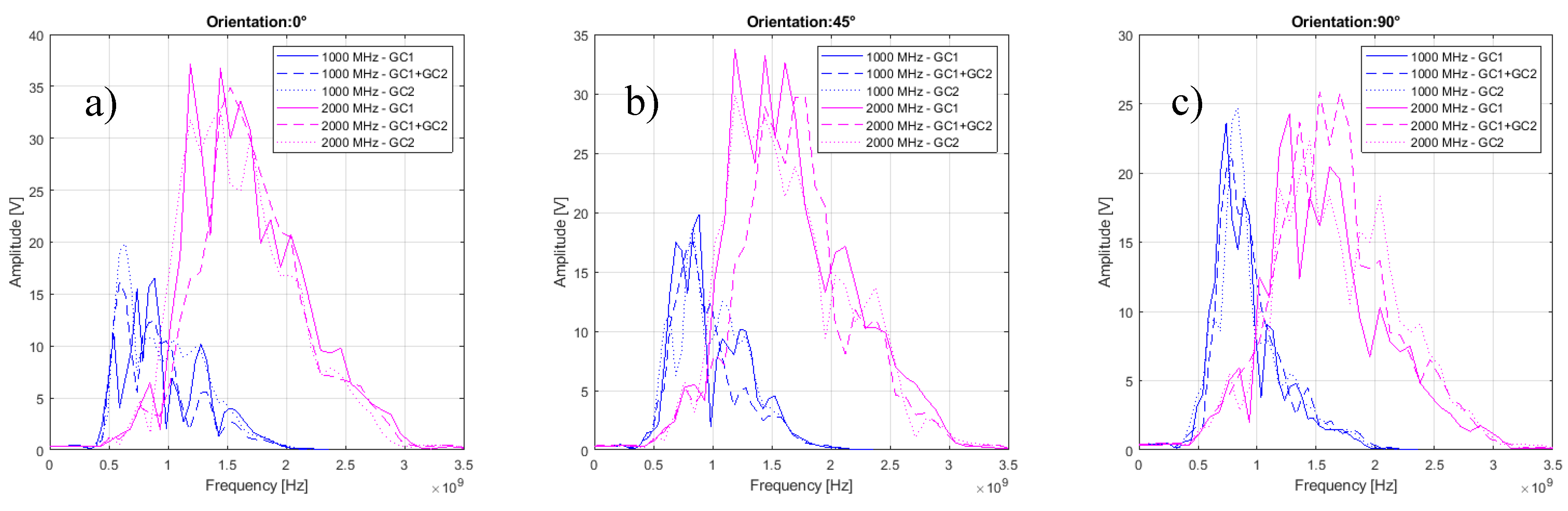
3.2. Grading-Dependent Behaviours
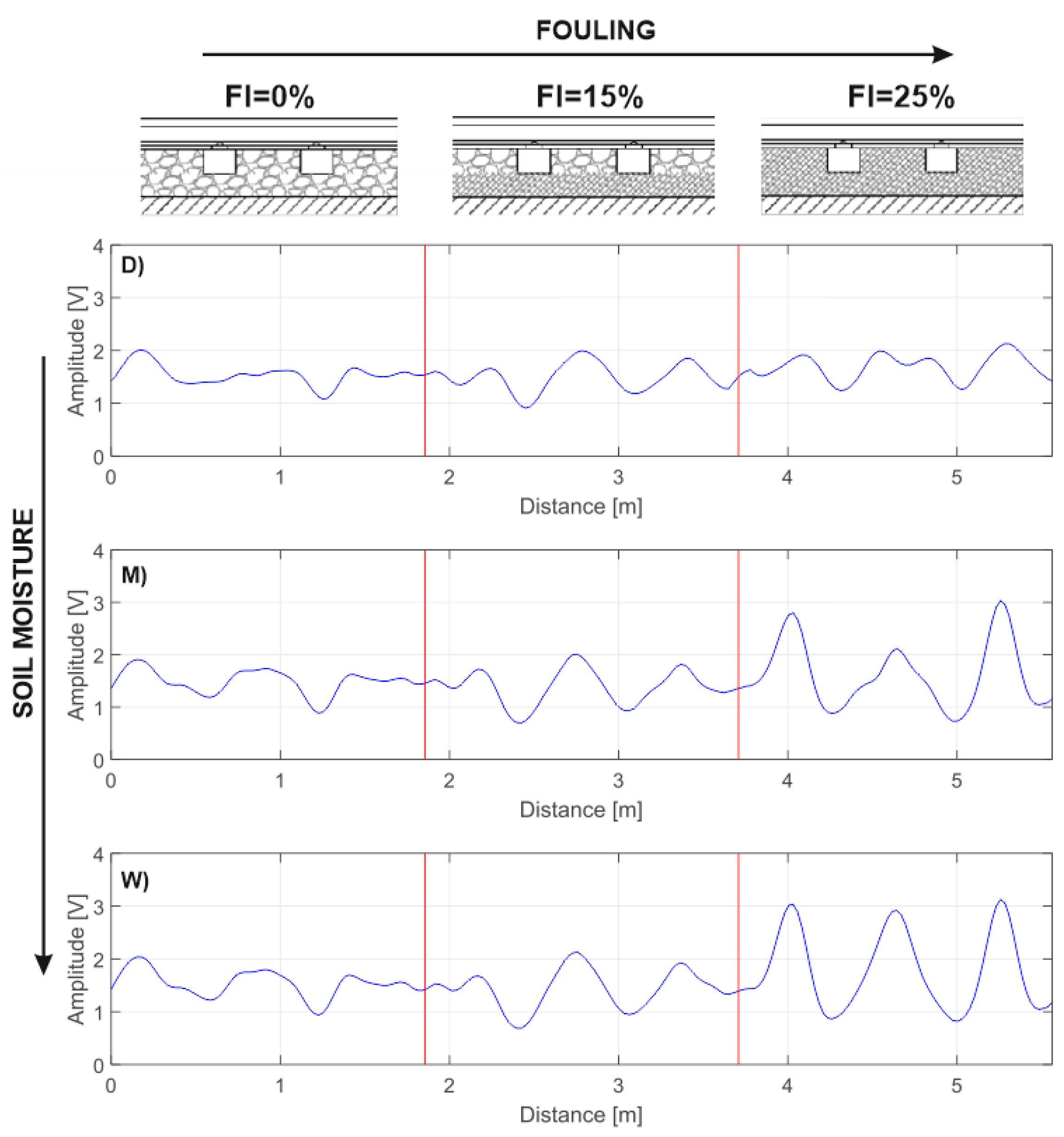
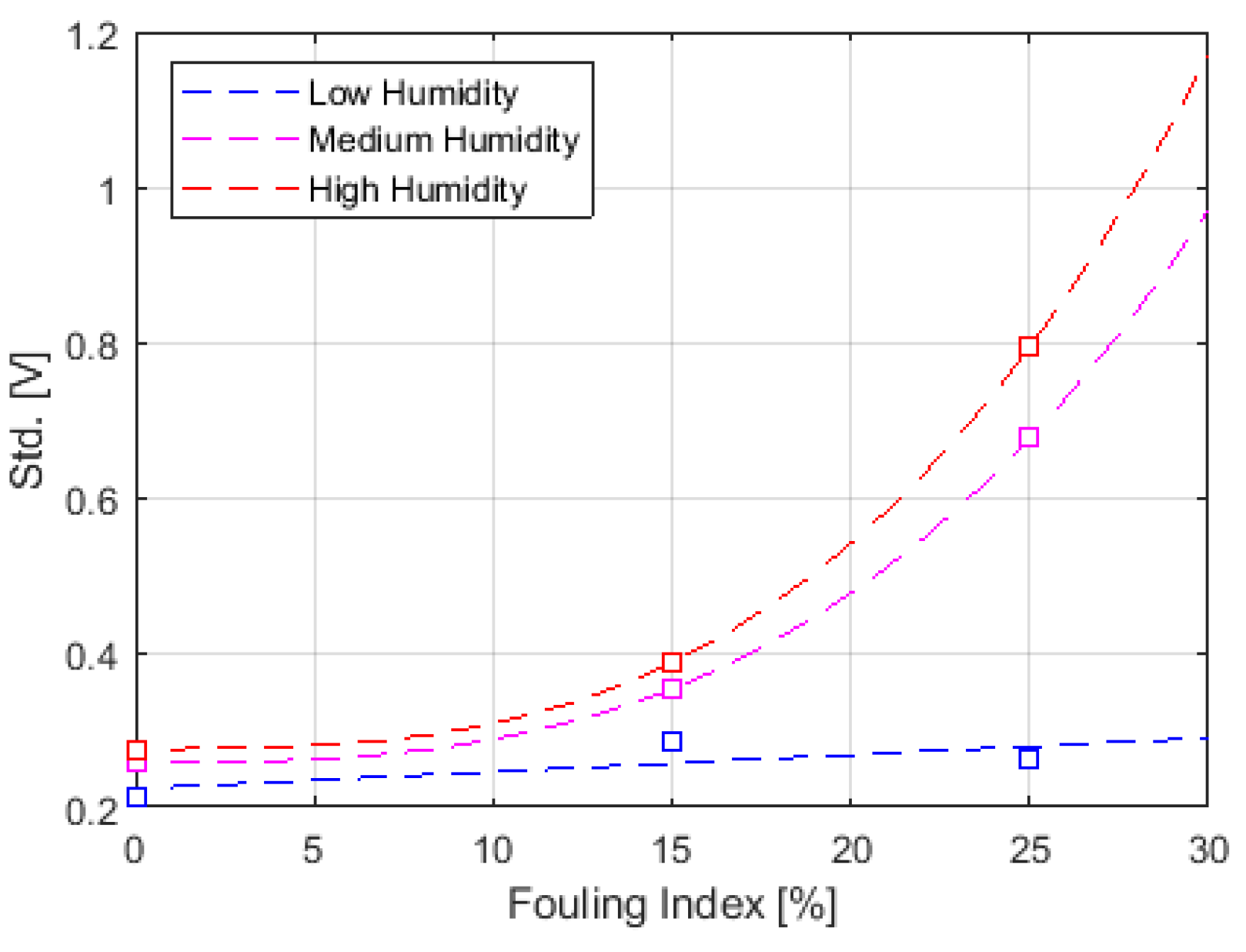
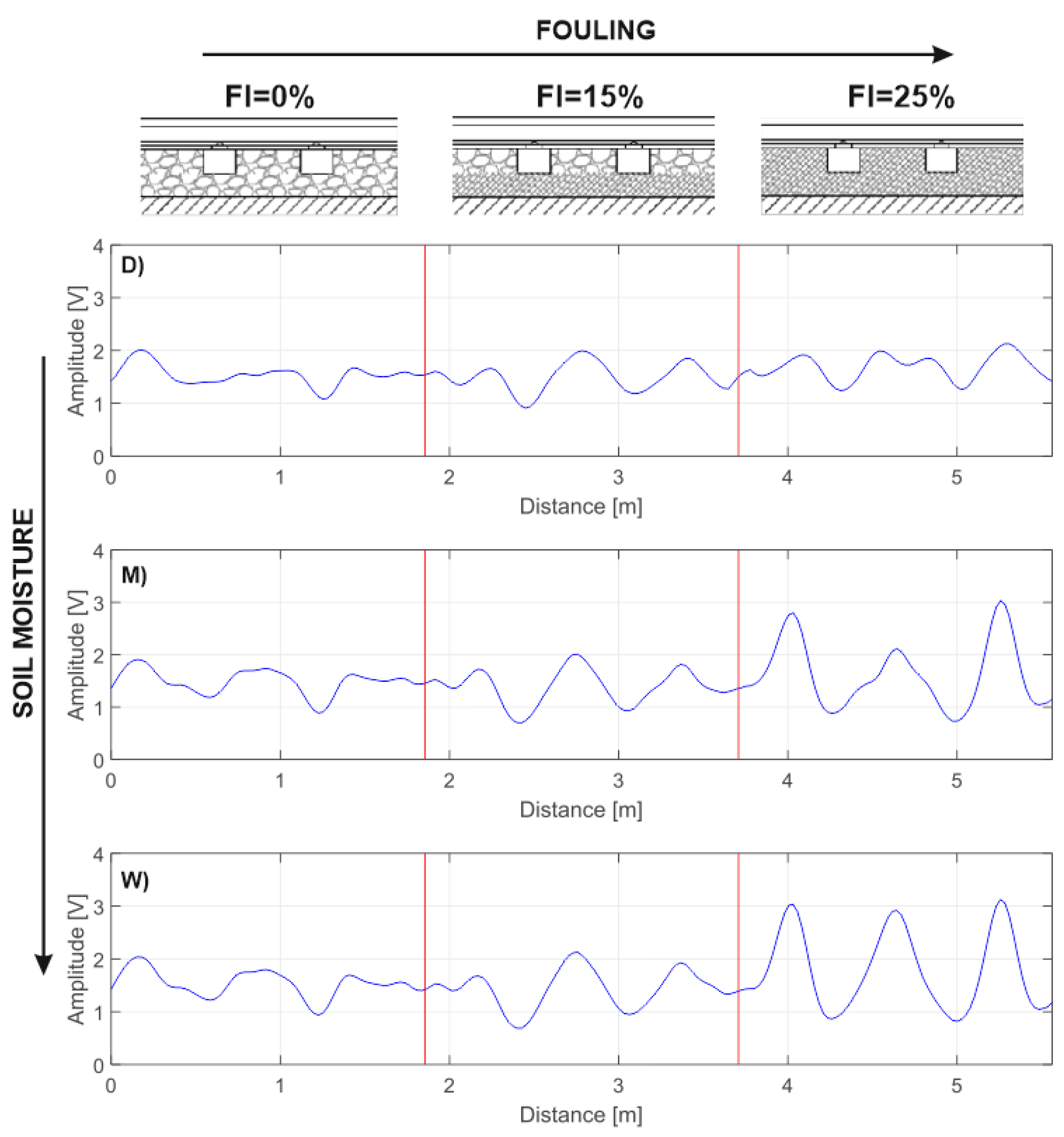
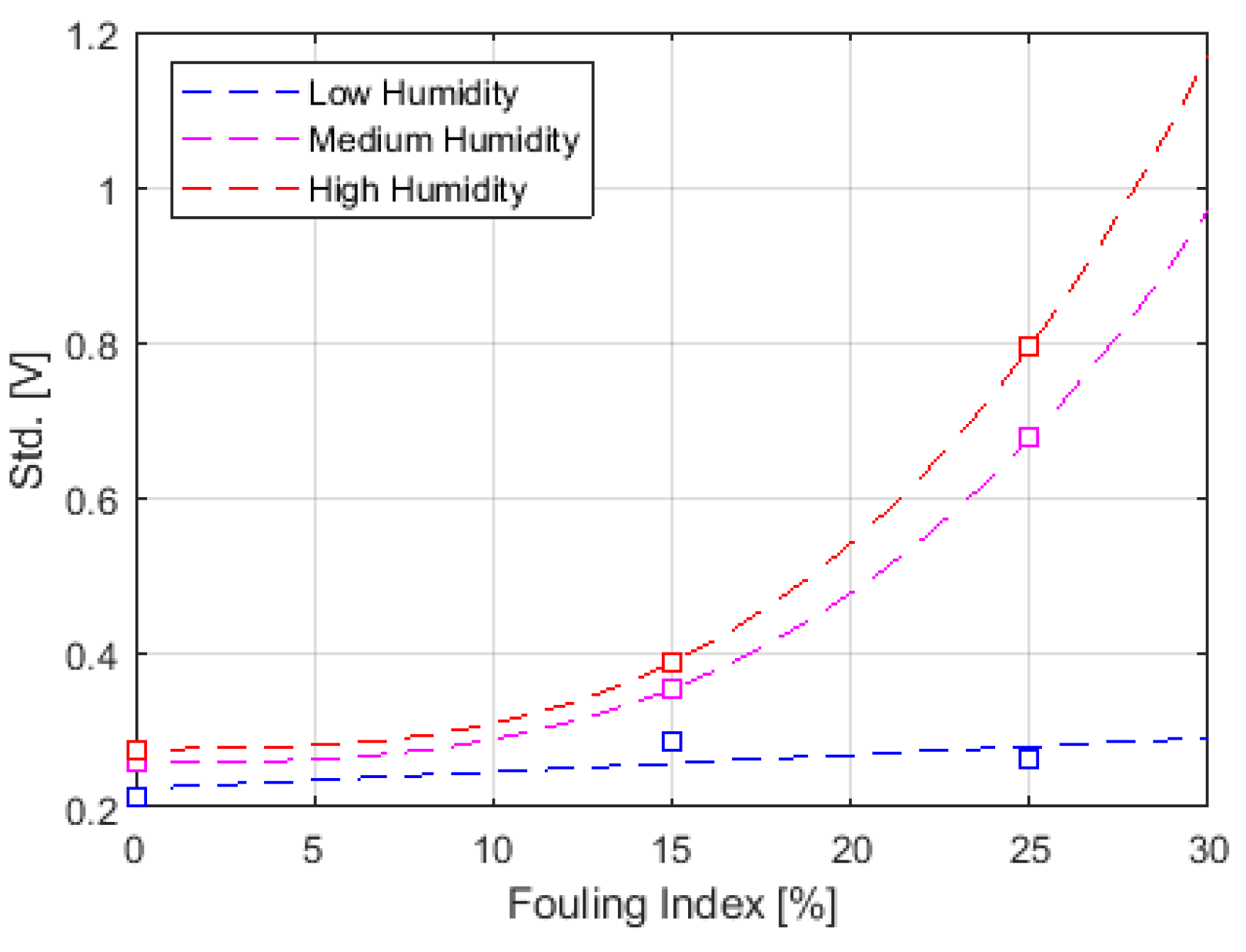
3.3. Fouling/Moisture Effects on the Surface Reflection Amplitude
4. Conclusions and Practical Implications
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Indraratna, B. 1st Ralph Proctor lecture of ISSMGE. Railroad performance with special reference to ballast and substructure characteristics. Transp. Geotech. 2016, 7, 74–114. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Bianchini Ciampoli, L.; Calvi, A.; Brancadoro, M.G.; Alani, M.A. Railway ballast condition assessment using ground-penetrating radar—An experimental, numerical simulation and modelling development. Constr. Build. Mater. 2016, 140, 508–520. [Google Scholar] [CrossRef]
- Artagan, S.S.; Bianchini Ciampoli, L.; D’Amico, F.; Calvi, A.; Tosti, F. Non‑destructive Assessment and Health Monitoring of Railway Infrastructures. Surv. Geophys. 2019, 1–37. [Google Scholar] [CrossRef]
- Indraratna, B.; Nimbalkar, S.; Coop, M.; Sloan, S.W. A Constitutive model for coal-fouled ballast capturing the effects of particle degradation. Comput. Geotech. 2014, 61, 96–107. [Google Scholar] [CrossRef]
- Selig, E.T.; Waters, J.M. Track geotechnology and substructure management; Thomas Telford Publications: London, UK, 1994. [Google Scholar]
- Ebrahimi, A.; Tinjum, J.M.; Edil, T.B. Protocol for testing fouled railway ballast in large-scale cyclic triaxial equipment. Geotech. Testing J. 2012, 35, 1–9. [Google Scholar] [CrossRef]
- Selig, E.T.; Dello Russo, V.; Laine, K.J. Sources and Causes of Ballast Fouling, Report No. R-805; Association of American Railroads, Technical Center: Chicago, IL, USA, 1992. [Google Scholar]
- Jol, H. Ground penetrating radar theory and applications, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Daniels, D.J. Ground penetrating radar, 2nd ed.; The Institution of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Clark, M.R.; Gillespie, R.; Kemp, T.; McCann, D.M.; Forde, M.C. Electromagnetic properties of railway ballast. NDT E Int. 2001, 34, 305–311. [Google Scholar] [CrossRef]
- Hugenschmidt, J. Railway track inspection using GPR. J. Appl. Geophys. 2000, 43, 147–155. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Xie, W.; Roberts, R. Time-frequency approach for ground penetrating radar data analysis to assess railroad ballast condition. Res. Nondestr. Eval. 2008, 19, 219–237. [Google Scholar] [CrossRef]
- Benedetto, F.; Tosti, F.; Alani, A.M. An entropy-based analysis of GPR data for the assessment of railway ballast conditions. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3900–3908. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Xie, W.; Roberts, R.; Leng, Z. Data analysis techniques for GPR used for assessing railroad ballast in high radio-frequency environment. J. Transp. Eng. 2010, 136, 96–105. [Google Scholar] [CrossRef]
- Sussmann, T.R.; O’Hara, K.R.; Selig, E.T. Development of material properties for railway application of ground penetrating radar. Proc. SPIE 2002, 4758. [Google Scholar] [CrossRef]
- Shao, W.; Bouzerdoum, A.; Phung, S.L.; Su, L.; Indraratna, B.; Rujikiatkamjorn, C. Automatic classification of ground-penetrating-radar signals for railway-ballast assessment. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3961–3972. [Google Scholar] [CrossRef]
- Fontul, S.; Fortunato, E.; De Chiara, F.; Burrinha, R.; Baldeiras, M. Railways Track Characterization Using Ground Penetrating Radar. Procedia Eng. 2016, 143, 1193–1200. [Google Scholar] [Green Version]
- De Chiara, F. Improvement of railway track diagnosis using ground penetrating radar. Ph.D. Thesis, La Sapienza University, Rome, Italy, 2014. [Google Scholar]
- Olhoeft, G.R.; Selig, E.T. Ground penetrating radar evaluation of railway track substructure conditions. In Proceedings of the 9th International Conference on Ground Penetrating Radar (GPR 2002), Santa Barbara, CA, USA, 29 April–2 May 2002. [Google Scholar]
- Bianchini Ciampoli, L.; Tosti, F.; Brancadoro, M.G.; D’Amico, F.; Alani, A.M.; Benedetto, A. A spectral analysis of ground-penetrating radar data for the assessment of the railway ballast geometric properties. NDT E Int. 2017, 90, 39–47. [Google Scholar] [CrossRef]
- Tosti, F.; Benedetto, A.; Bianchini Ciampoli, L.; Lambot, S.; Patriarca, C.; Slob, E.C. GPR analysis of clayey soil behaviour in unsaturated conditions for pavement engineering and geoscience applications. Near Surf. Geophys. 2016, 14, 127–144. [Google Scholar] [CrossRef]
- Patriarca, C.; Tosti, F.; Velds, C.; Benedetto, A.; Lambot, S.; Slob, E. Frequency dependent electric properties of homogeneous multi-phase lossy media in the ground-penetrating radar frequency range. J. Appl. Geophys. 2013, 97, 81–88. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Ortuani, B.; Giudici, M.; Mele, M. Soil moisture mapping using GPR for pavement applications. In Proceedings of the 7th International Workshop on Advanced Ground Penetrating Radar, Nantes, France, 2–5 July 2013. [Google Scholar]
- Tosti, F.; Bianchini Ciampoli, L.; Calvi, A.; Alani, A.M.; Benedetto, A. An investigation into the railway ballast dielectric properties using different GPR antennas and frequency systems. NDT E Int. 2018, 93, 131–140. [Google Scholar] [CrossRef]
- Brancadoro, M.G.; Bianchini Ciampoli, L.; Ferrante, C.; Benedetto, A.; Tosti, F.; Alani, A.M. An Investigation into the railway ballast grading using GPR and image analysis. In Proceedings of the 9th International Workshop on Advanced Ground Penetrating Radar, IWAGPR 2017, Edinburgh, UK, 28–30 June 2017. [Google Scholar]
- Benedetto, A.; Bianchini Ciampoli, L.; Brancadoro, M.G.; Alani, A.M.; Tosti, F. A Computer-Aided Model for the Simulation of Railway Ballast by Random Sequential Adsorption Process. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 243–257. [Google Scholar] [CrossRef]
- Shangguan, P.; Al-Qadi, I.L.; Leng, Z. Ground-penetrating radar data to develop wavelet technique for quantifying railroad ballast-fouling conditions. Transp. Res. Rec. 2012, 2289, 95–102. [Google Scholar] [CrossRef]
- Fontul, S.; Fortunato, E.; De Chiara, F. Evaluation of ballast fouling using GPR. In Proceedings of the 15th International Conference on Ground Penetrating Radar (GPR 2014), Brussels, Belgium, 30 June–4 July 2014. [Google Scholar]
- RFI DTC SICS SP IFS 001A. “General technical standard of civil works contracts”, Section 17, Ballast for Railway Track-beds. Italian National Railways, 2016.
- EN 933-1:2012. Tests for geometrical properties of aggregates—Part 1: Determination of particle size distribution—Sieving method. European Committee for Standardization, 2012.
- Bianchini Ciampoli, L.; Tosti, F.; Economou, N.; Benedetto, F. Signal Processing of GPR Data for Road Surveys. Geosciences 2019, 9, 96. [Google Scholar] [CrossRef]
- Al-Qadi, I.A.; Xie, W.; Roberts, R. Optimization of antenna configuration in multiple-frequency ground penetrating radar system for railroad substructure assessment. NDT E Int. 2010, 43, 20–28. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Schettini, G.; Twizere, C. Evaluation of geotechnical stability of road using GPR. In Proceedings of the 6th International Workshop on Advanced Ground Penetrating Radar, IWAGPR 2011, Aachen, Germany, 22–24 June 2011. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Config. | Layer 1 | Layer 2 | Moisture | ||
|---|---|---|---|---|---|
| Grading Curve | Fouling Index | Grading Curve | Fouling Index | ||
| 1 | GC1 | 0 | GC1 | 0 | D;M;W |
| 2 | GC1 | 0 | GC1 | 0 | D;M;W |
| 3 | GC1 | 0 | GC1 | 25 | D;M;W |
| 4 | GC1 | 25 | GC1 | 25 | D;M;W |
| 5 | GC1 | 0 | GC2 | 0 | D;M;W |
| 6 | GC2 | 0 | GC2 | 0 | D;M;W |
| 7 | GC2 | 0 | GC1 | 0 | D;M;W |
| 8 | GC1 | 0 | GC2 | 0 | D;M;W |
| 9 | GC2 | 25 | GC2 | 25 | D;M;W |
| 10 | GC2 | 0 | GC2 | 25 | D;M;W |
| Parameter | Tested Value |
|---|---|
| Central frequency | 1000 MHz, 2000 MHz |
| Antenna orientation | 0°, 45°, 90° |
| Soil Moisture | D;M;W |
| Frequency | Parameter | Value |
|---|---|---|
| 1000 MHz | Time window | 25 ns |
| Horizontal resolution | 0.025 m | |
| Samples | 512 | |
| 2000 MHz | Time window | 15 ns |
| Horizontal resolution | 0.025 m | |
| Samples | 512 |
| Soil Moisture | a3 | a2 | a1 | a0 |
|---|---|---|---|---|
| Low | 0.0022 | 0.2240 | 0 | 0 |
| Medium | 2.47 × 10−5 | 5.24 × 10−5 | 0 | 0.2575 |
| High | 3.33 × 10−5 | −4.12 × 10−5 | 0 | 0.2754 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bianchini Ciampoli, L.; Calvi, A.; D’Amico, F. Railway Ballast Monitoring by GPR: A Test-Site Investigation. Remote Sens. 2019, 11, 2381. https://doi.org/10.3390/rs11202381
Bianchini Ciampoli L, Calvi A, D’Amico F. Railway Ballast Monitoring by GPR: A Test-Site Investigation. Remote Sensing. 2019; 11(20):2381. https://doi.org/10.3390/rs11202381
Chicago/Turabian StyleBianchini Ciampoli, Luca, Alessandro Calvi, and Fabrizio D’Amico. 2019. "Railway Ballast Monitoring by GPR: A Test-Site Investigation" Remote Sensing 11, no. 20: 2381. https://doi.org/10.3390/rs11202381
APA StyleBianchini Ciampoli, L., Calvi, A., & D’Amico, F. (2019). Railway Ballast Monitoring by GPR: A Test-Site Investigation. Remote Sensing, 11(20), 2381. https://doi.org/10.3390/rs11202381