1. Introduction
Point clouds collected by mobile LiDAR systems are frequently used for various 3D city mapping applications, such as urban planning, city infrastructure construction, and intelligent transportation systems, etc. Taking intelligent transportation systems as an example, updated city maps that include the location of urban objects and traffic signs are useful for navigation, which could be used to decrease traffic congestion, lessen the risk of accidents, and develop self-driving systems [
1,
2].
3D city maps could be created and updated from various perspectives by mapping objects. Many elements, including user requirements, map contents, accuracy, scale, and so on, all are very important in 3D mapping. Before an object can be mapped, it needs to be classified in point clouds. Many approaches in recent publications already acquired excellent results for point cloud classification for this line of research [
3,
4,
5,
6,
7,
8,
9,
10,
11]. However, these approaches still have three main challenges.
(1) These approaches all strongly belong to the category of supervised learning. Lots of training samples are required to learn discriminating features of different classes. However, most available benchmarks of point clouds are manually labeled, which is labor-intensive and time-consuming.
(2) In these publications, training and test samples are strongly correlative with several “sameness”. For example, researchers normally divide a complete dataset into several files, with half for training and the other half for testing. These files should share some “sameness”, such as sensor, period, and area of data acquisition. The robustness for these methods is challenged when applied in other scenes.
(3) Due to necessary training process, most of above approaches achieve performance at the cost of the heavy computation burden.
To overcome these problems, the following solutions provide good inspiration.
(1) Knowledge-based approaches can be employed, which explore discriminating features of objects based on people’s understanding of the surrounding environment. Therefore, massive training samples are not needed. Already in the early 90s, knowledge-based system had been proposed for image and point cloud processing [
12,
13,
14,
15]. Recently, the line of research has been active again [
16].
(2) To enhance the robustness of methods, it is critical to exploit discriminating characteristics of urban objects which are not easily affected by the external environment. Geometric features, which are reflected by several closely spaced points, have always been considered for discriminating feature extraction. Furthermore, knowledge-based approaches can help to realize the extraction of geometric features.
(3) The knowledge-based approach can save lots of computation time with no heavy training process.
Based on the above inspirations, the knowledge-based approach is investigated in three parts, i.e., close spaces of points, the defining of geometric features, and knowledge-based object classification.
Firstly, segmentation is a common way of grouping the point clouds into spaced neighborhood [
3,
17,
18,
19,
20,
21,
22,
23,
24]. A Link-Chain method based on a super-voxel segmentation of sparse 3D data obtained from LiDAR sensors was presented to segment and classify 3D urban point clouds [
3]. Vosselman et al. [
18] performed a voxelization to divide the point cloud space in a 3D grid of small regular cubes whose resolution depends on the size of the grid cells. Yang et al. [
21] generated multi-scale supervoxels from scattered mobile laser scanning points to improve the estimation of local geometric structures of neighboring points. Alexander et al. [
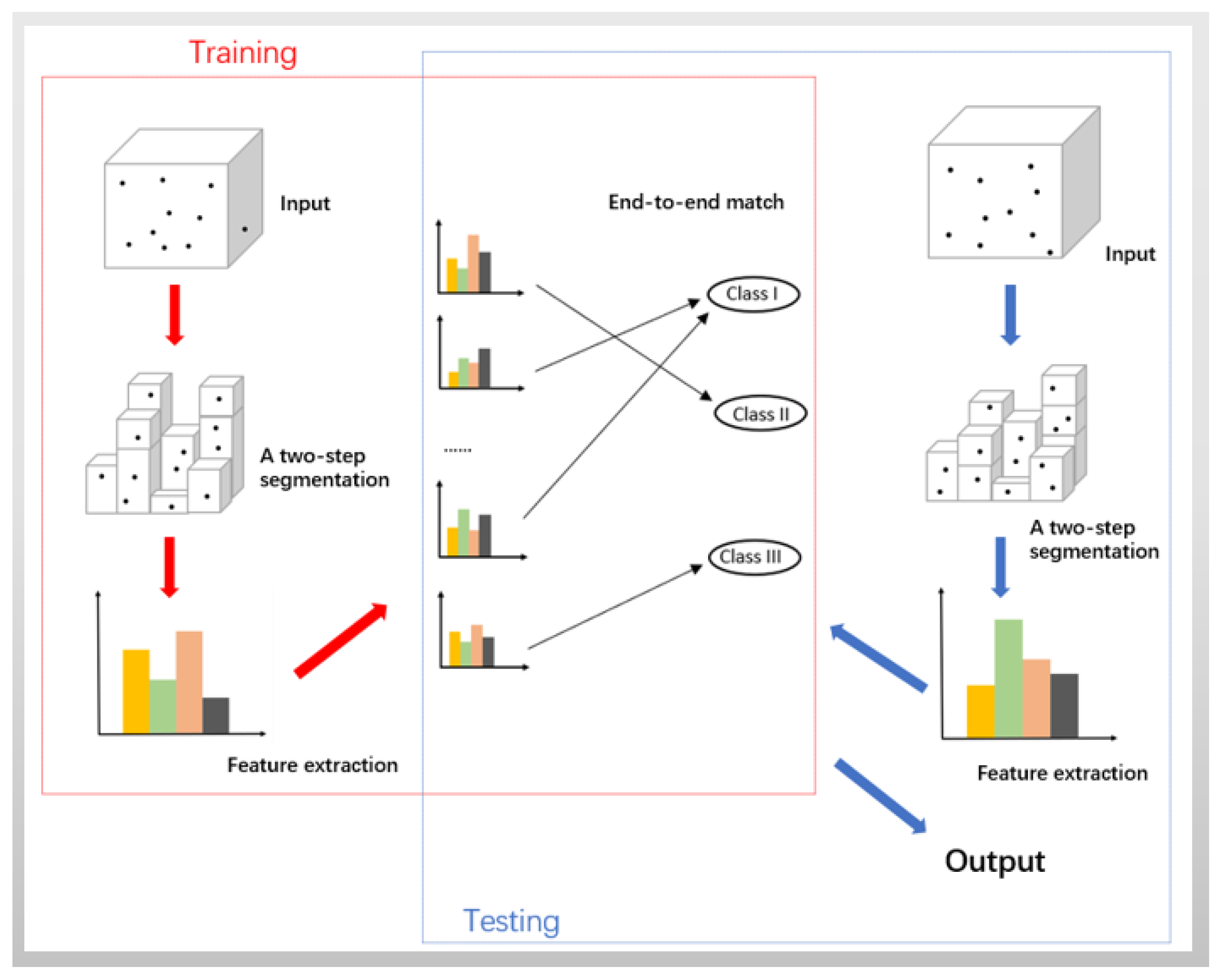
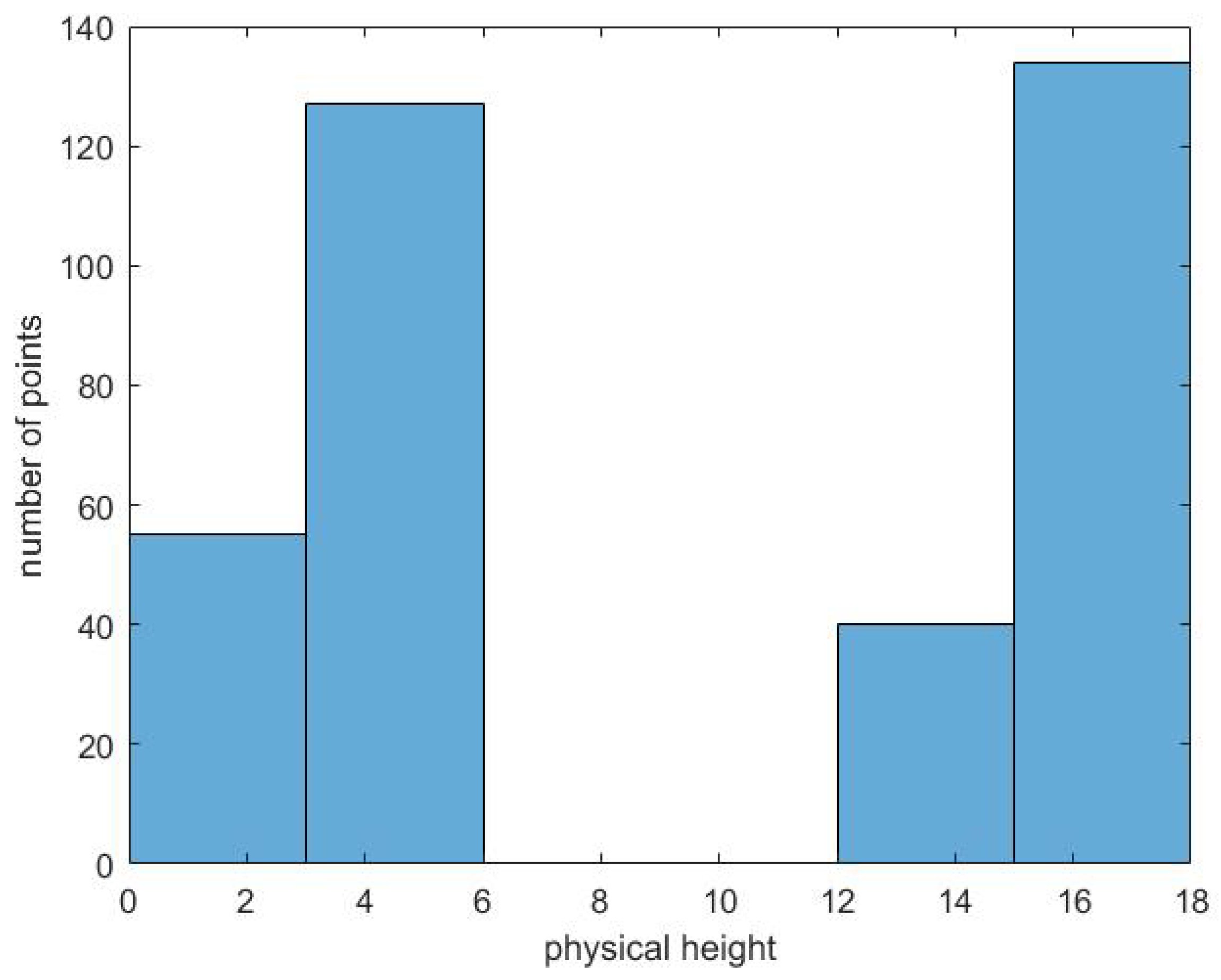
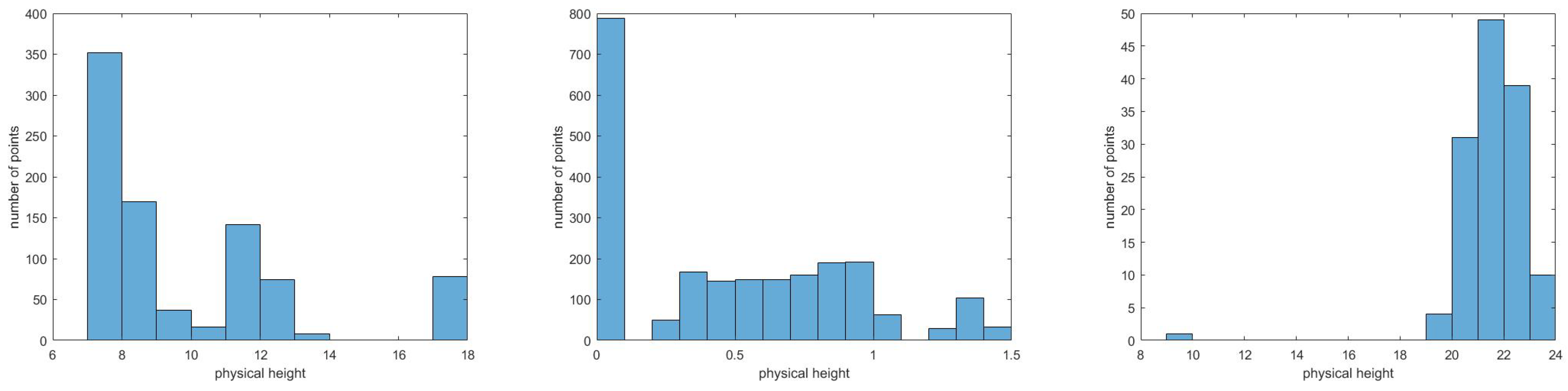
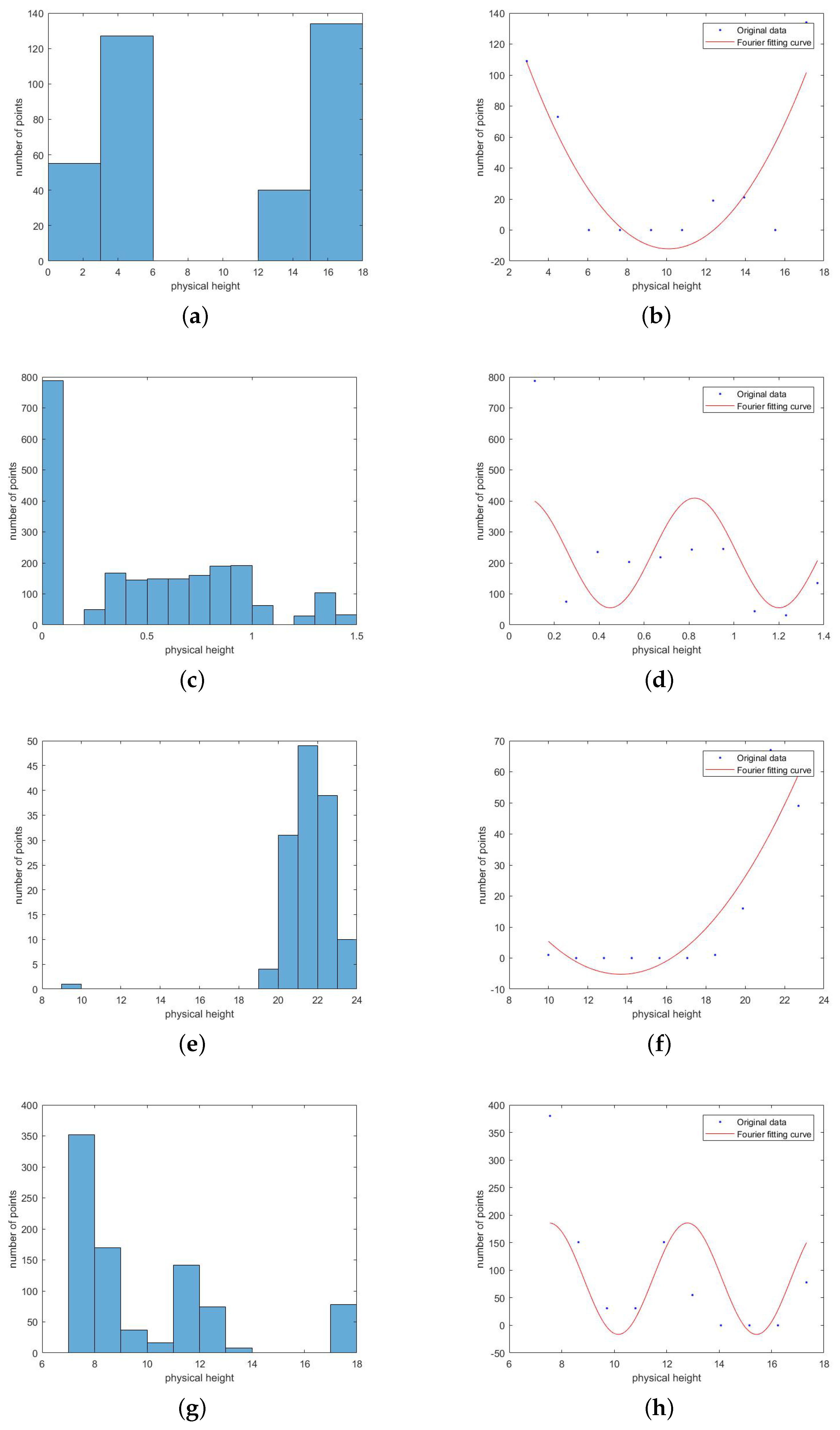
24] described a connected component segmentation approach for segmenting organized point cloud data. In this paper, a two-step segmentation procedure is performed. In the first step, a cubic bounding box based on
x,
y, and
z coordinates of points is set up and then segmented into lots of small cubes. Based on the results of the first segmentation, Fourier Fitting (FF) for second adaptive segmentation is applied. As there are points of multiple object classes lying within a single block of the first segmentation, FF can adaptively separate these points into several groups. FF had been used in some point cloud and satellite data research [
25,
26]. The outputs of the two-step segmentation are respectively called the 3D block and the 3D sub-block.
Secondly, available geometric features from many closely spaced points need to be extracted. Some approaches had been known in the literature for feature extraction of laser scanner point clouds [
5,
27,
28,
29]. Pouria et al. [
5] extracted seven main features (geometrical shape, height above ground, and planarity, etc.) to train their classifier for object recognition, including cars, bicycles, buildings, pedestrians, and street signs, in 3D point clouds of urban street scene. Wang et al. [
27] listed the geometric features and additional statistical features to classify Ground, Building, and Vegetation. Li et al. [
28] proposed a knowledge-based approach that uses geometric features including size, shape, height. The study of three eigenvalues obtained from the covariance matrix of each segment was developed to detect geometrical shapes of urban objects [
29]. Chehata et al. [
30] defined height difference between the LiDAR point and the lowest point found in a large cylindrical volume. The feature helped discriminate ground and off-ground object in his work. In the paper, the height information and geometrical eigen-features are defined as an initial set of features from which to begin the research.
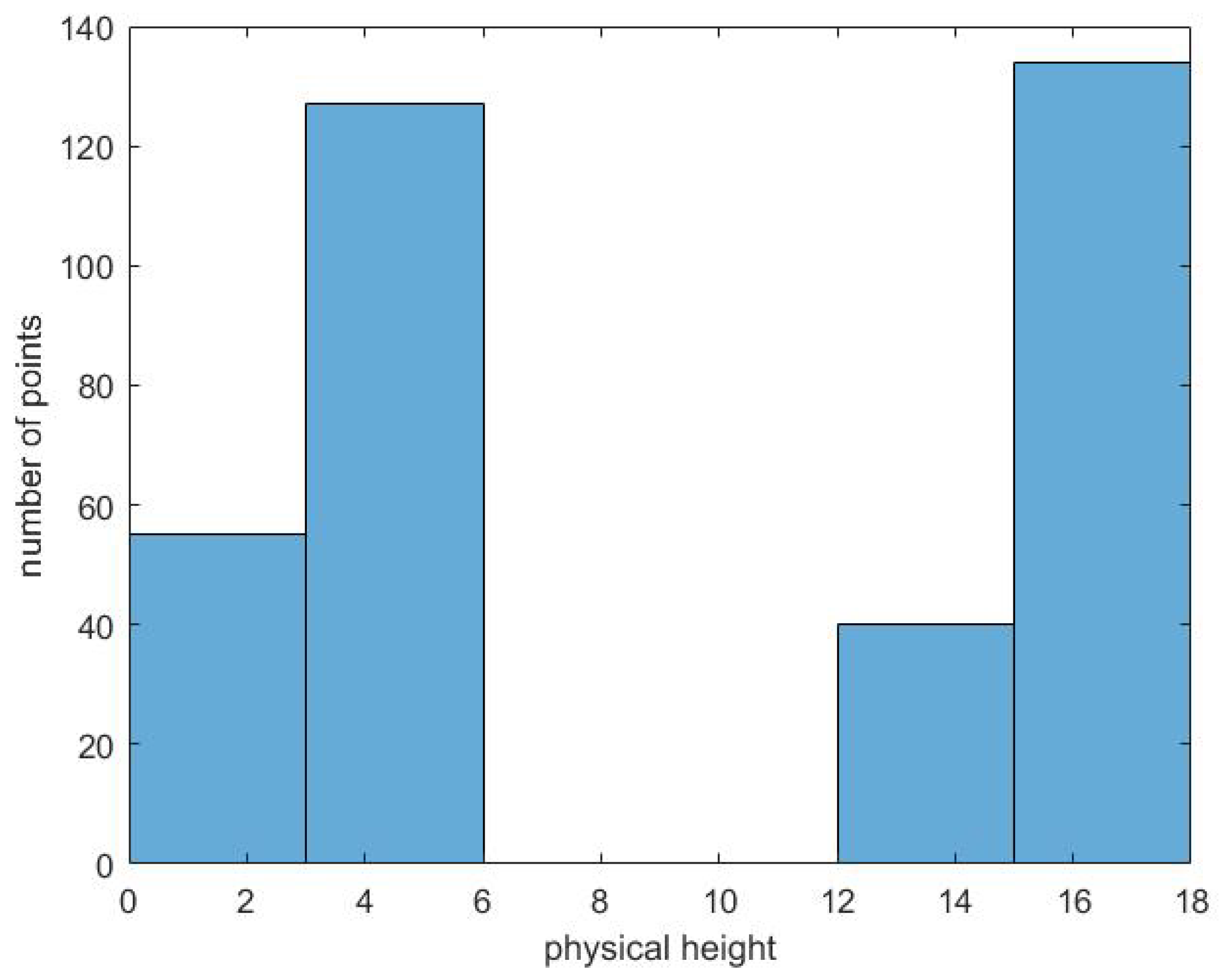
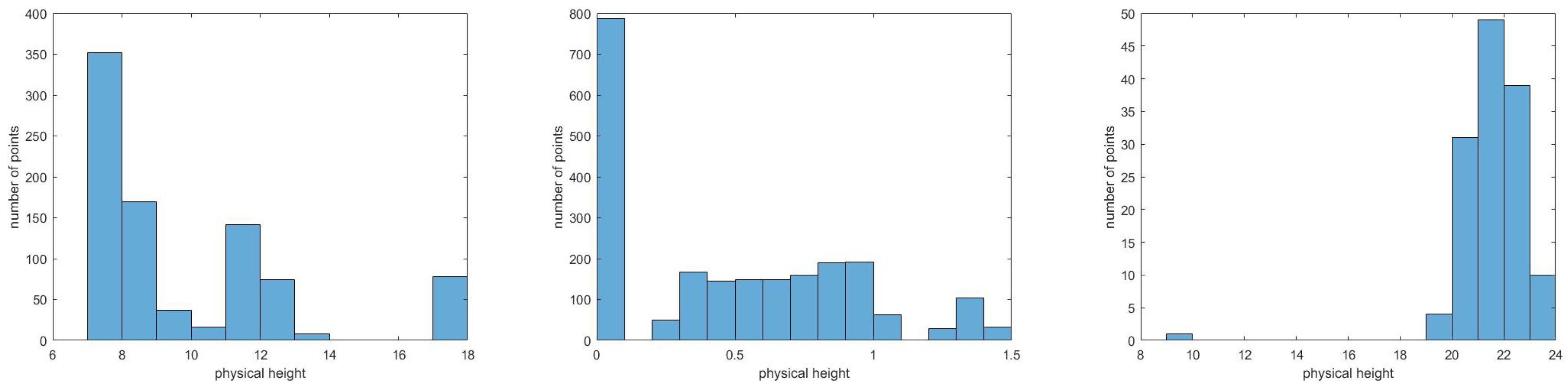
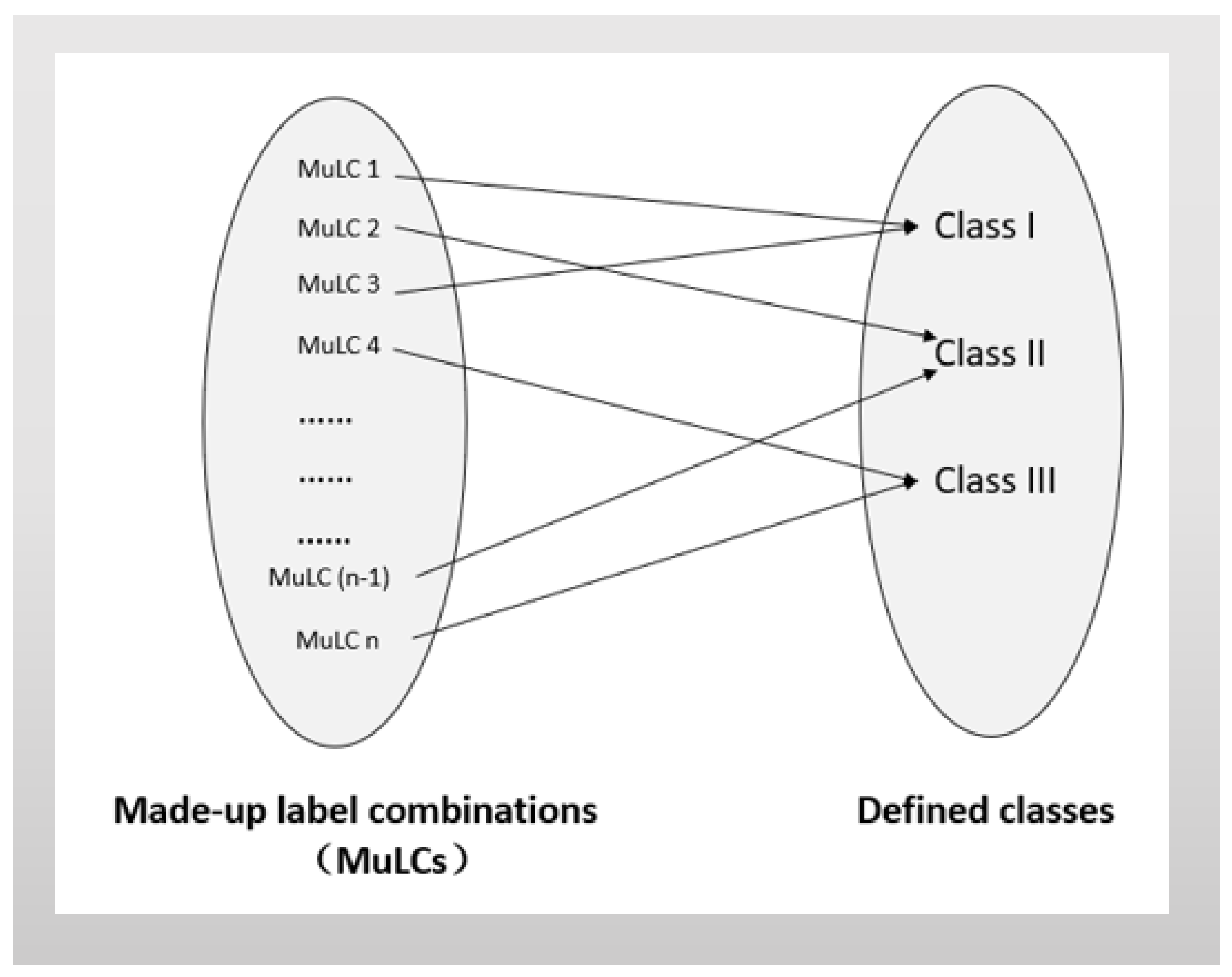
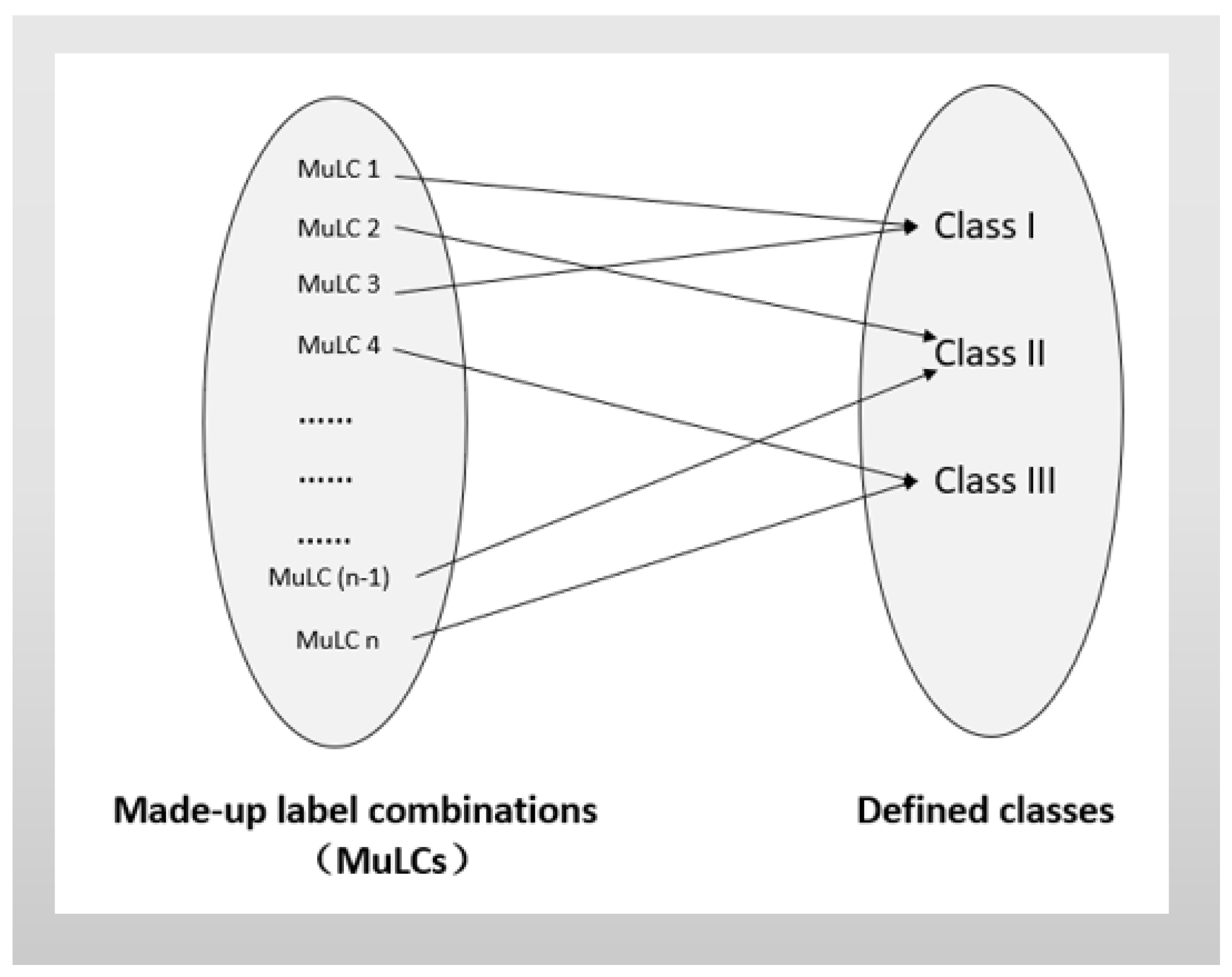
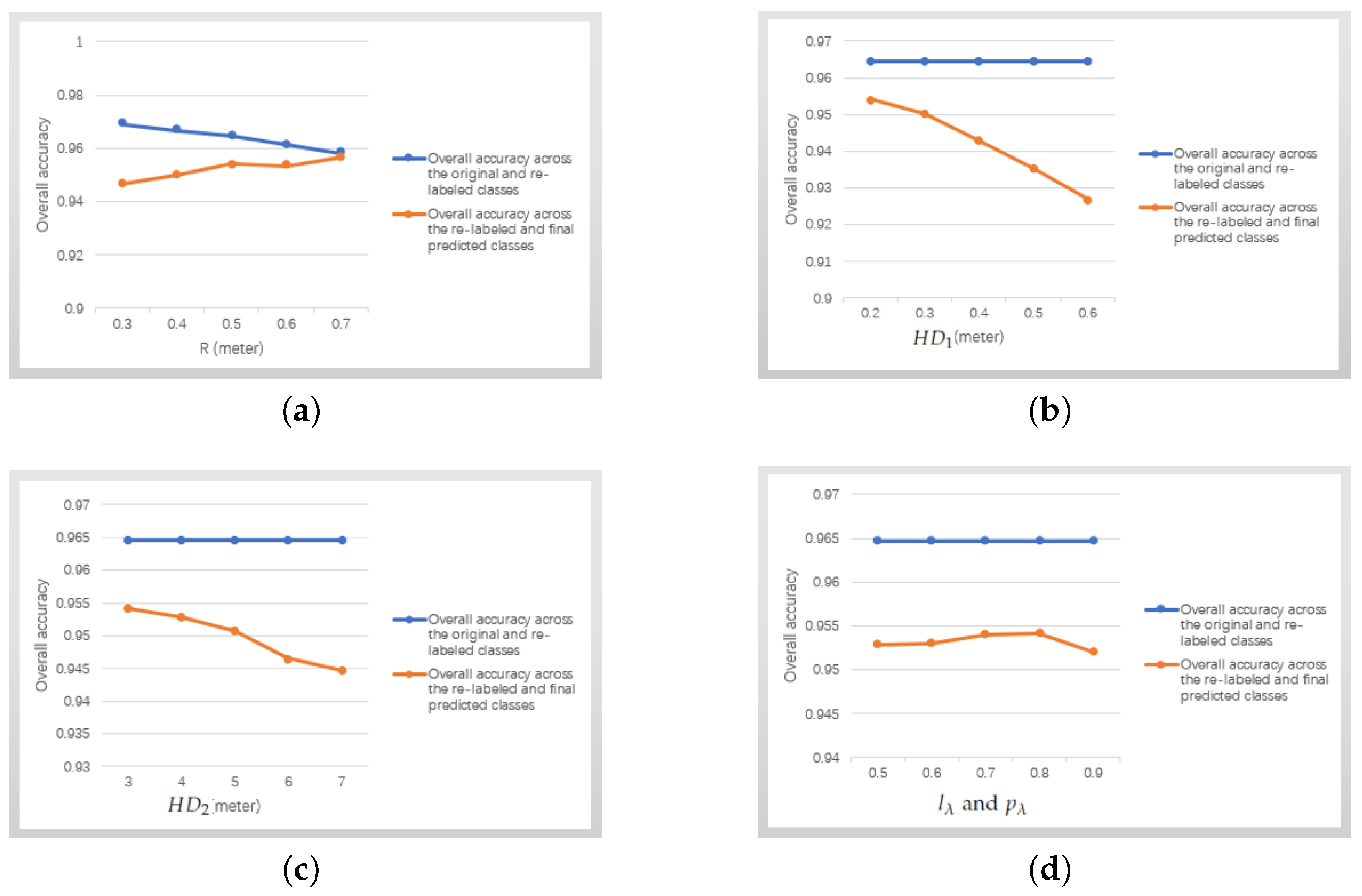
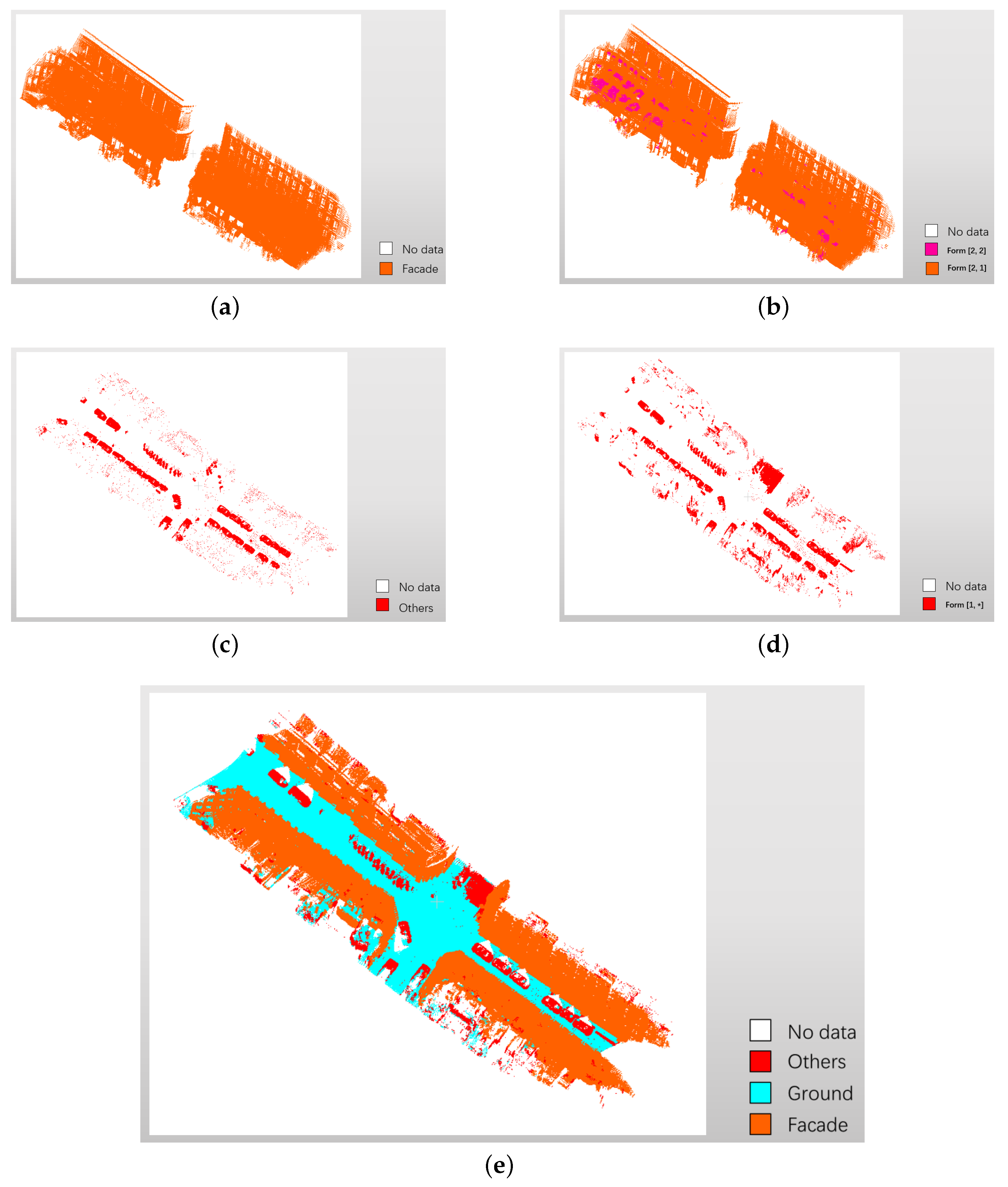
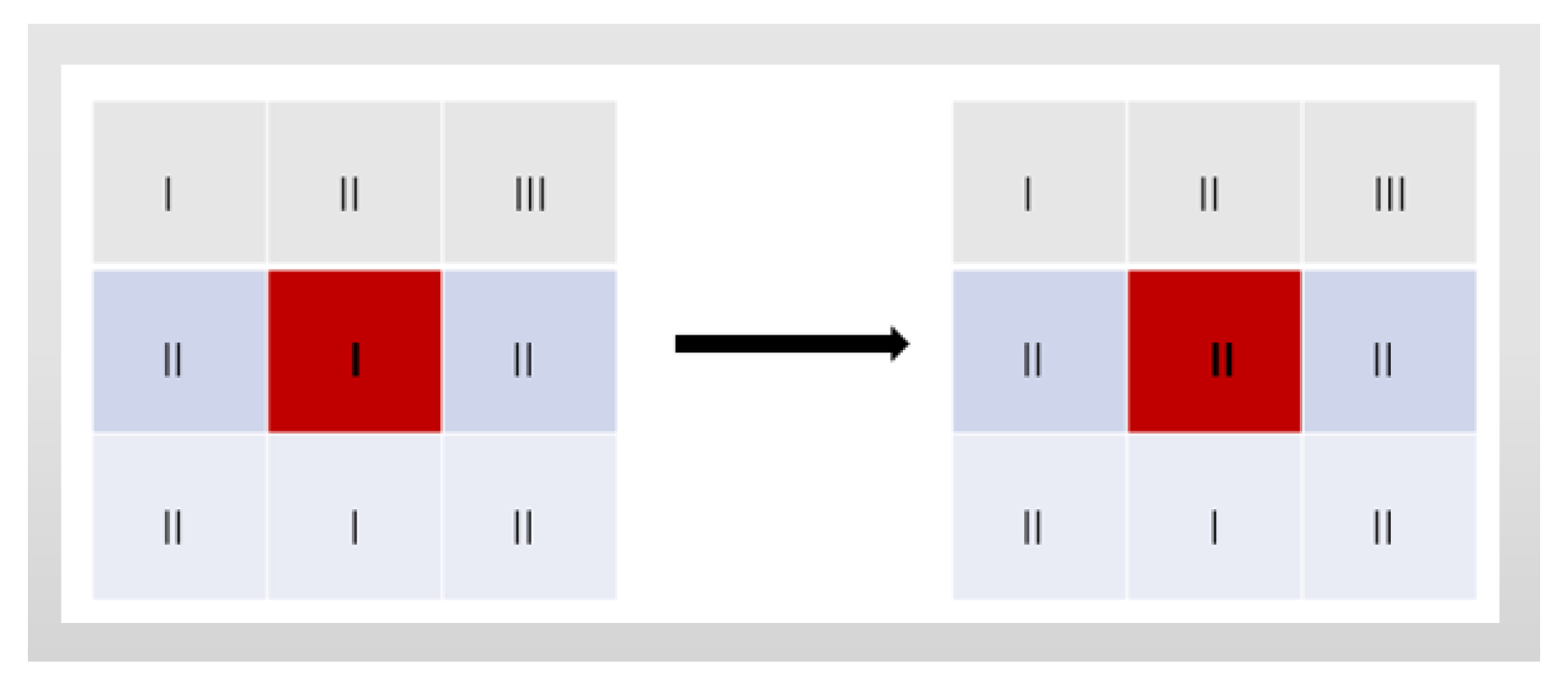
Finally, made-up labels for geometrical features are created to classify objects. For instance, height difference of points in blocks, , is represented by made-up label , . has three probable levels, (i) , (ii) , (iii) . Here and are two experiential thresholds of height difference. Every sub-block is presented by a vector expression of the combination of made-up labels. Based on people’s understanding of surrounding environment, each combination finally points directly to an object class. An end-to-end match between combinations of made-up labels and object classes is therefore built.
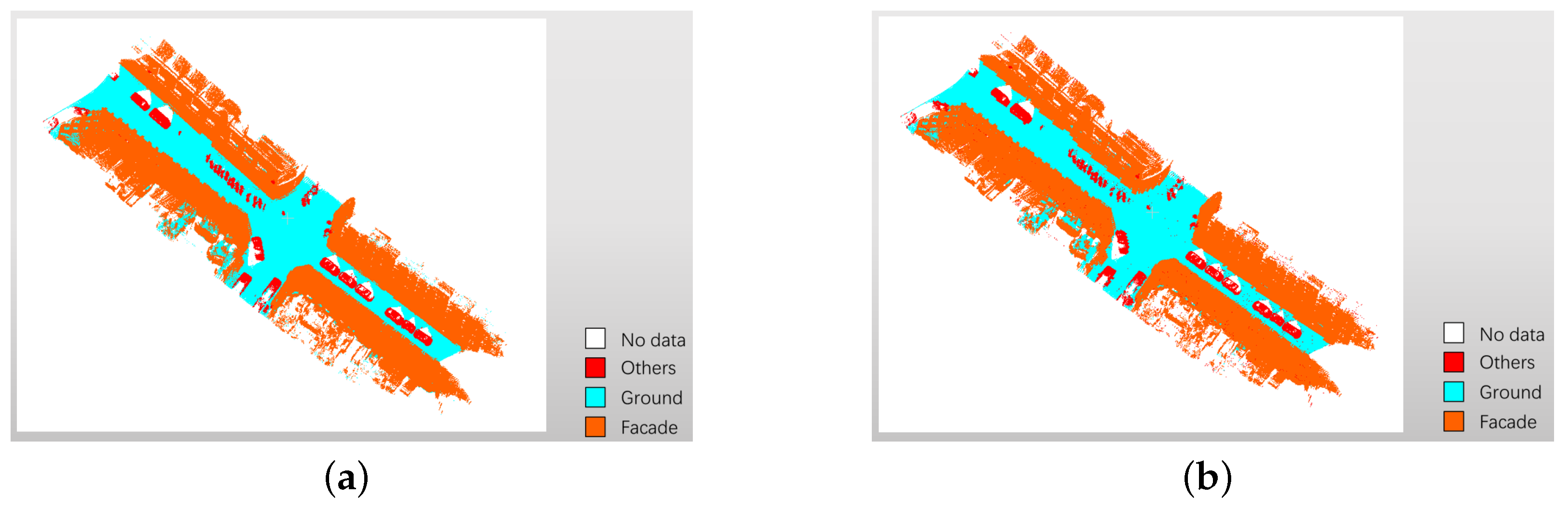
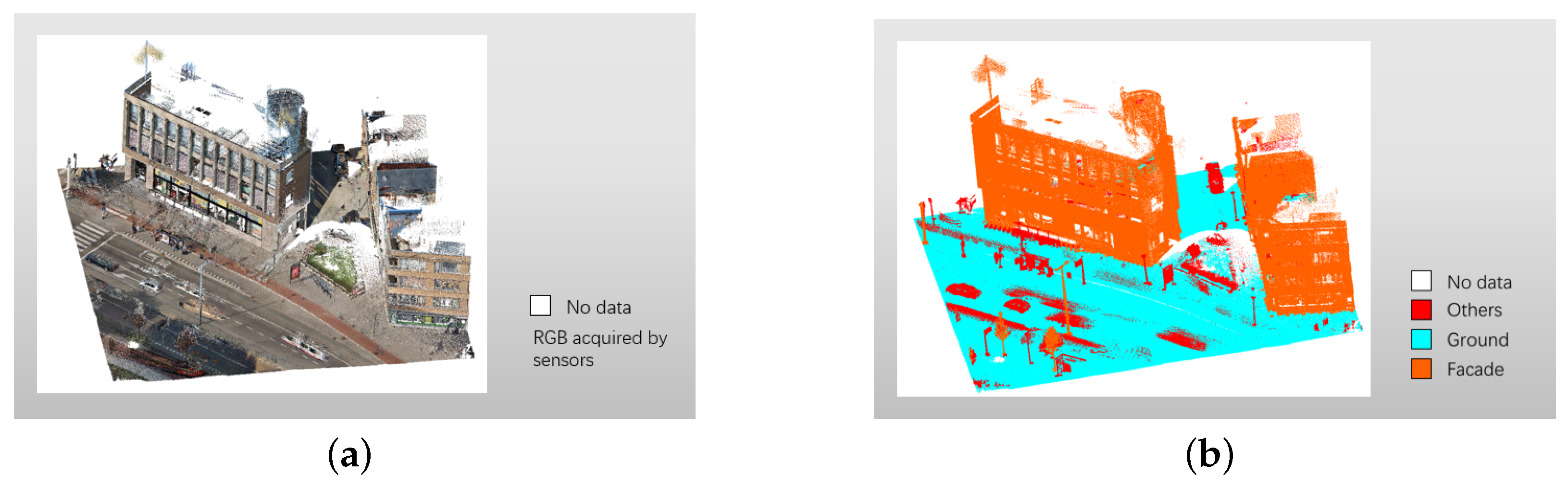
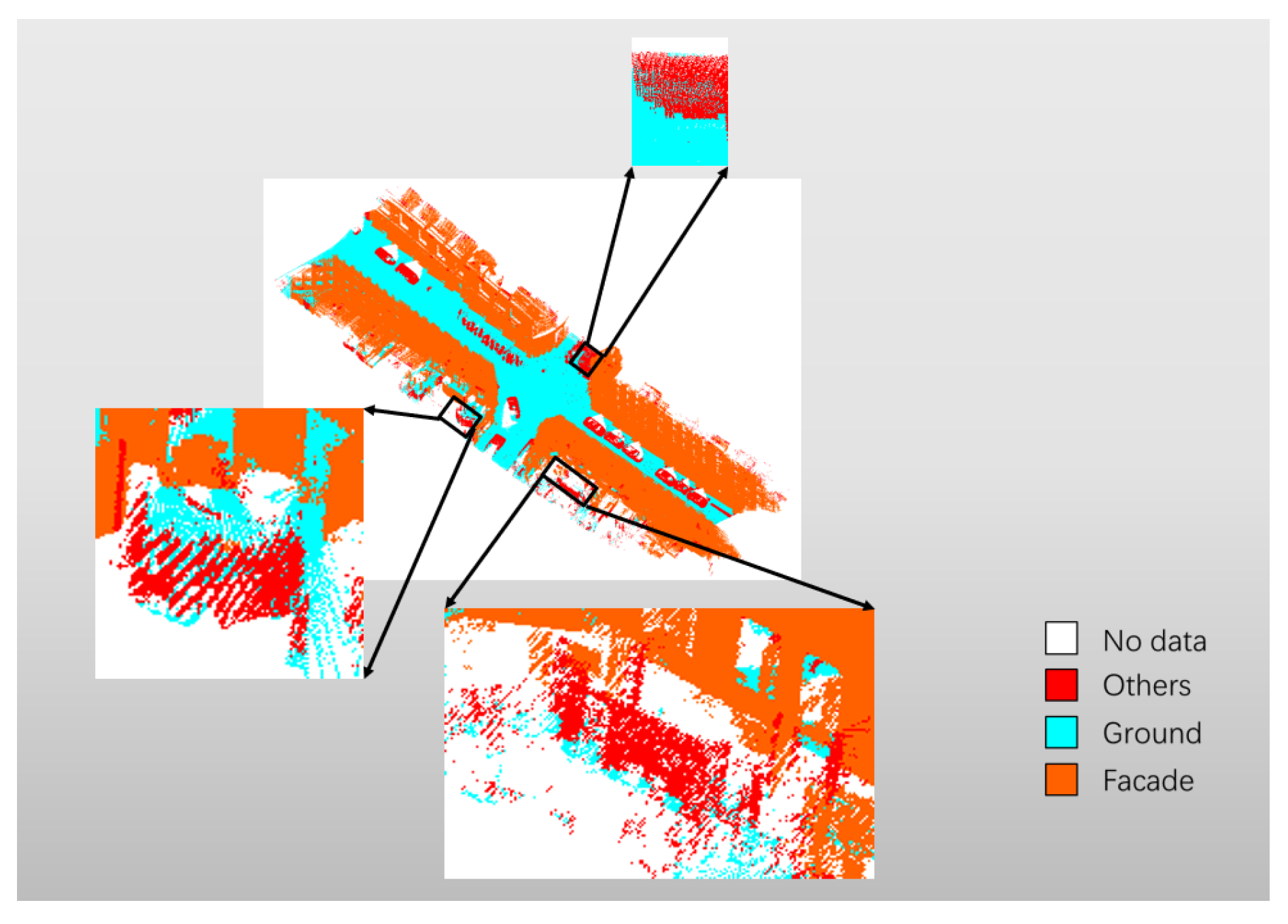
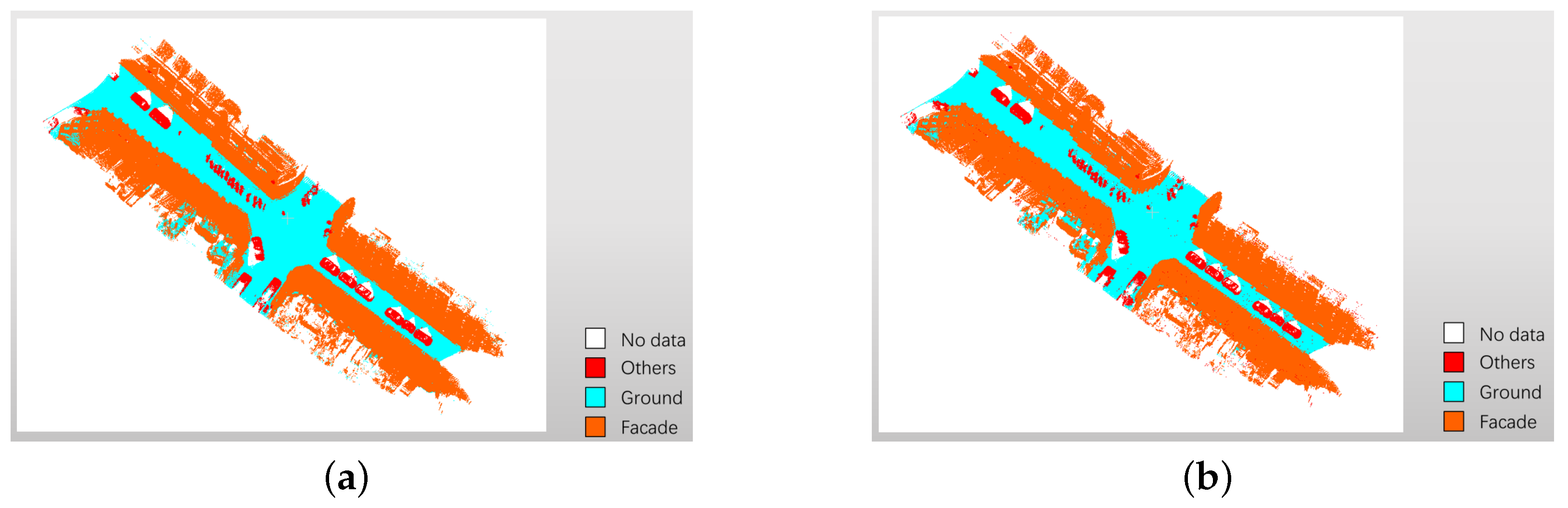
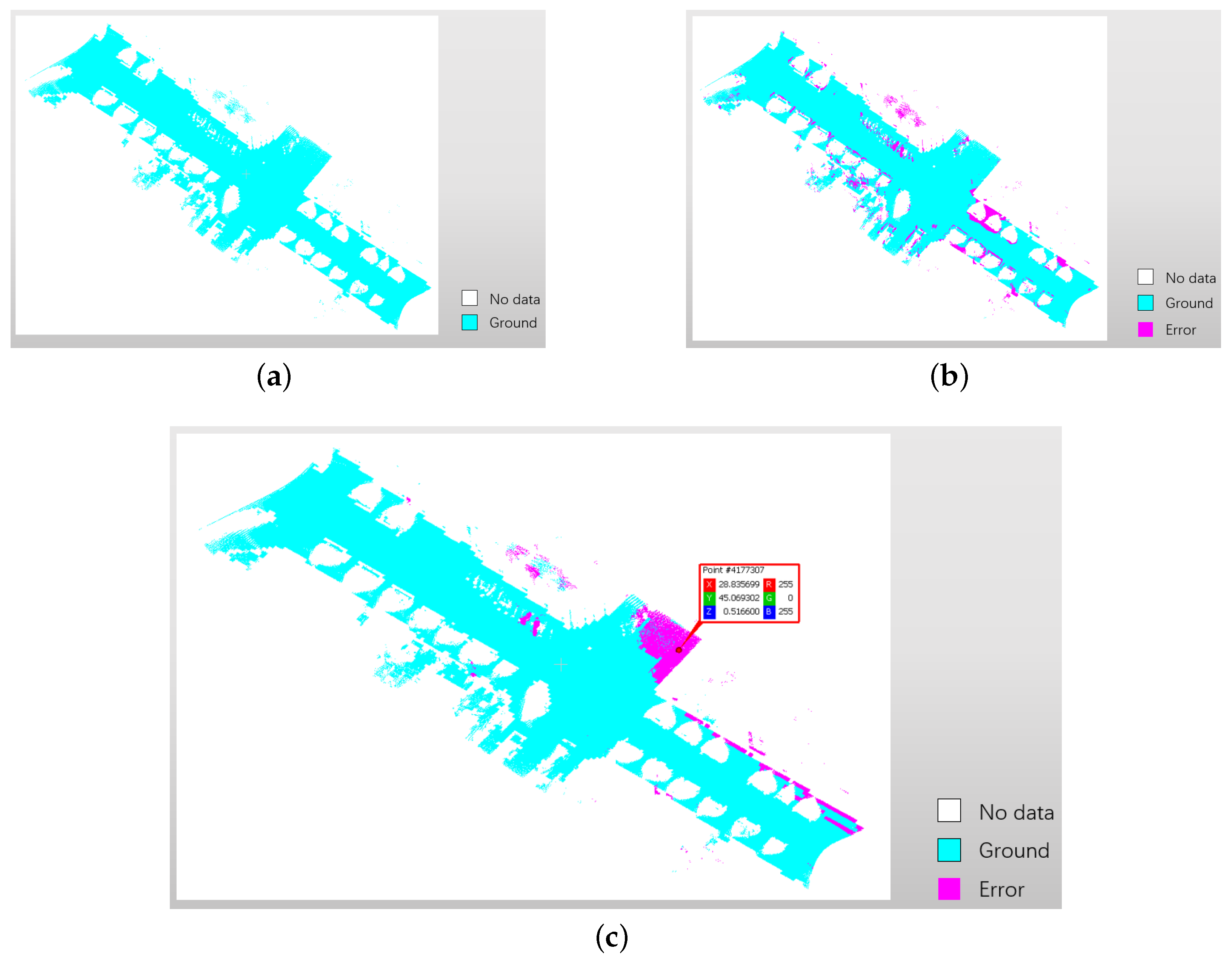
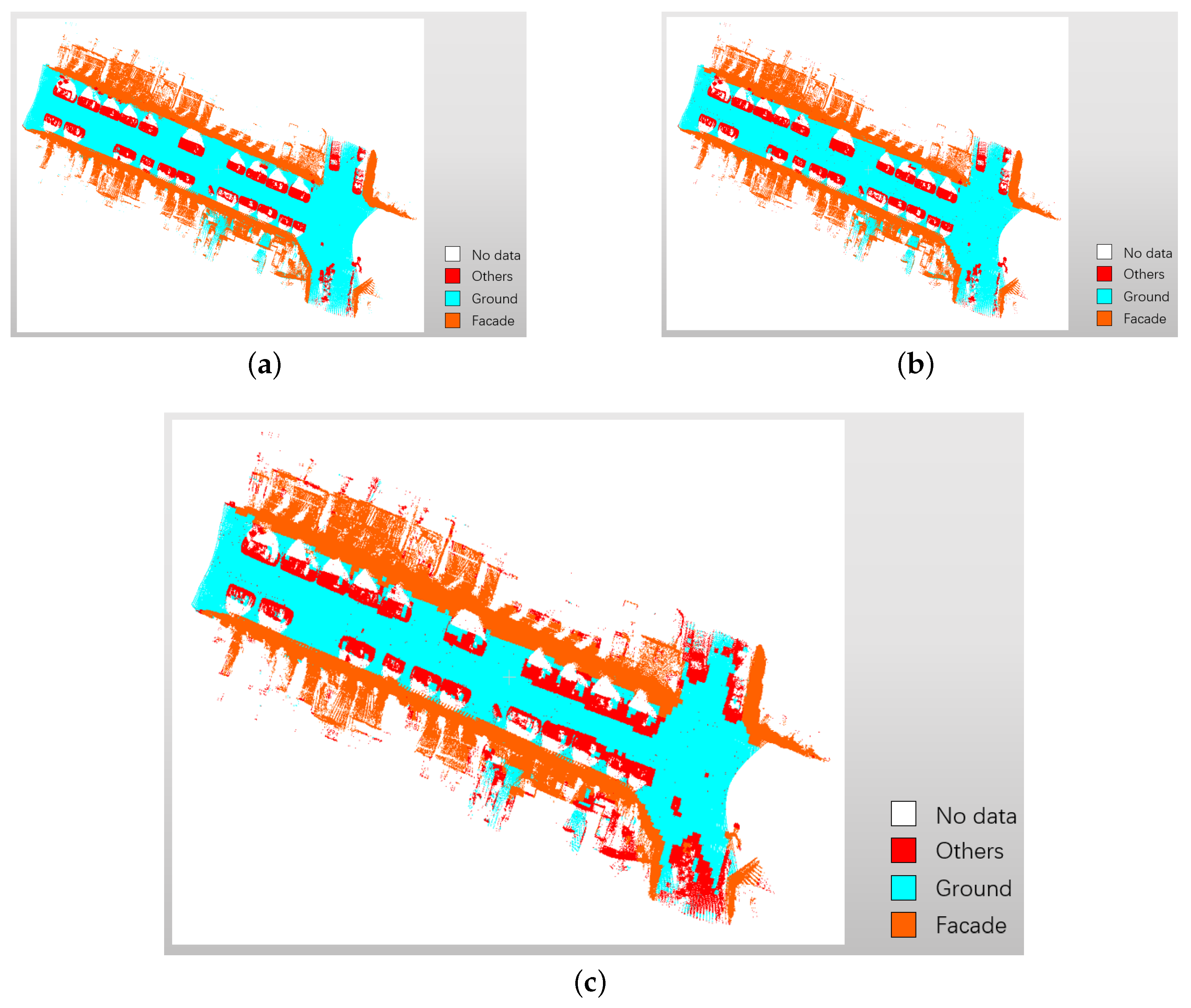
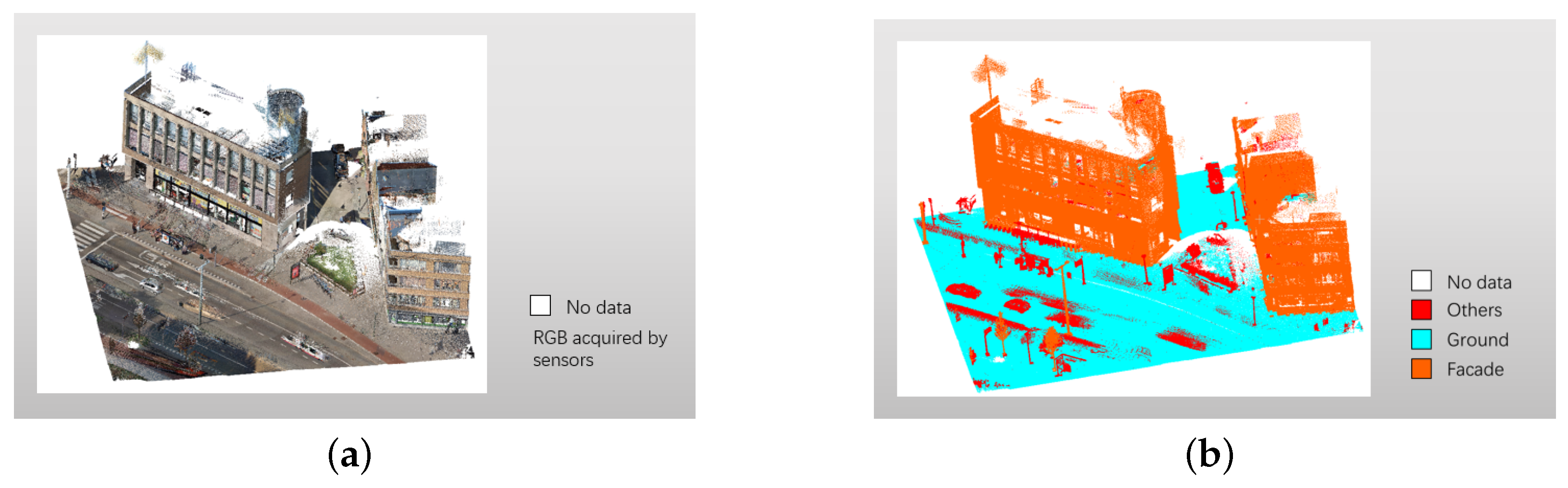
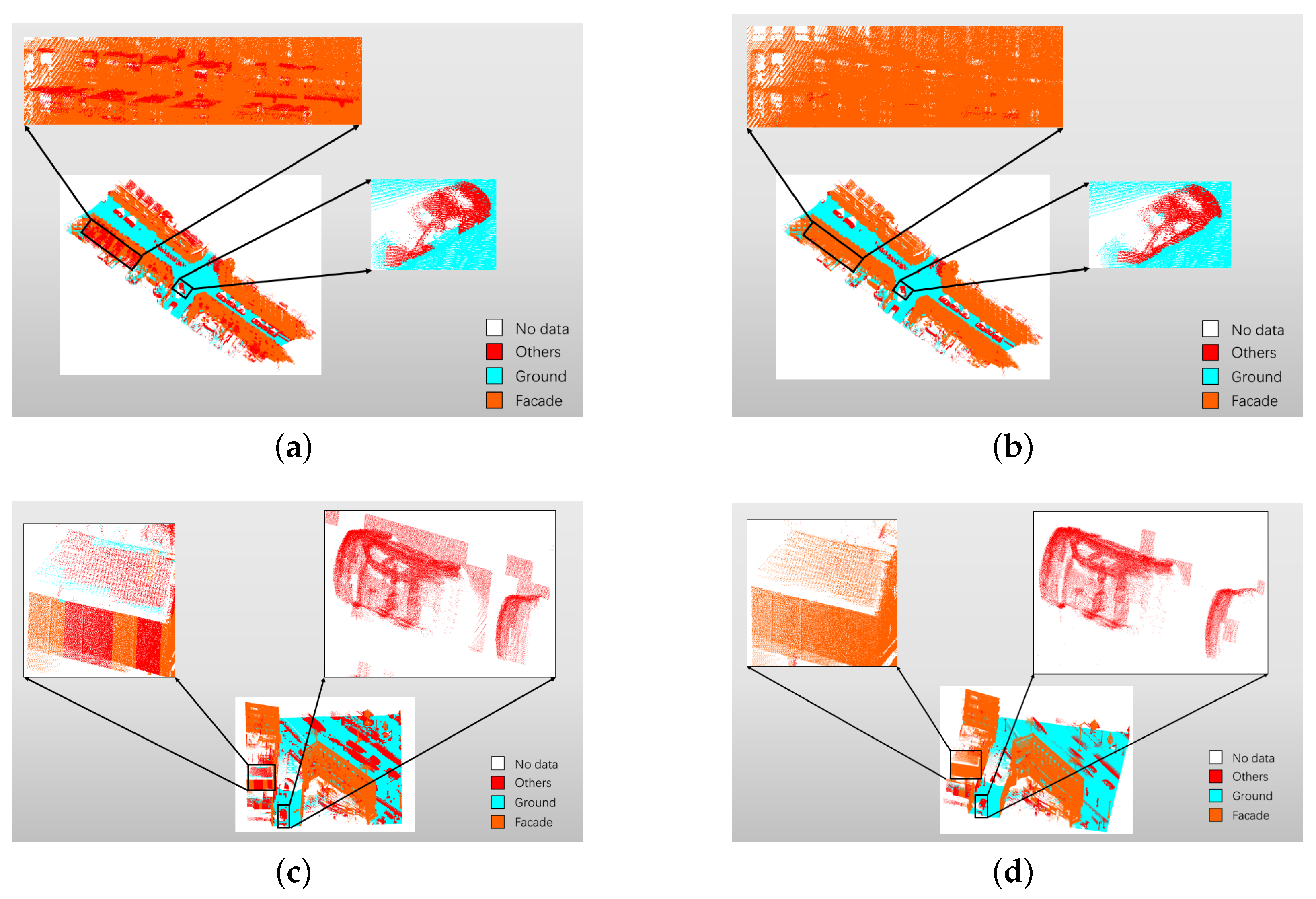
In summary, the paper presents an adaptive end-to-end classification approach for mobile laser scanning point clouds based on the knowledge in urban scenes. This paper includes the experiments in a point cloud benchmark, which quantificationally demonstrate the feasibility of the knowledge-based approach for classifying objects. The approach is also qualitatively tested in another urban scene to demonstrate its robustness. The main contribution of the work in the paper include:
(1) A knowledge-based approach to extract discriminating geometrical features is proposed. The motivation is to overcome the requirement of massive training samples, also to avoid the time-consuming training process;
(2) FF for second segmentation is introduced. In most cases, there are points of multiple object classes lying within a single block of the first segmentation. Fourier Fitting can adaptively divide these points into several sub-blocks;
(3) An end-to-end match is built between actual object classes and the combinations of made-up labels. It can intentionally highlight discriminating characteristics for each object class and realize quick object classification.
The remainder of this paper is organized as follows.
Section 2 introduces the proposed approach.
Section 3 discusses the experiment and result analysis, and
Section 4 presents the conclusion and future work.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}