Efficient Lidar Signal Denoising Algorithm Using Variational Mode Decomposition Combined with a Whale Optimization Algorithm

 ,
,
Abstract
1. Introduction
2. Brief Description of the VMD Algorithm
| Algorithm 1. Pseudocode for VMD |
| 1: Initialize |
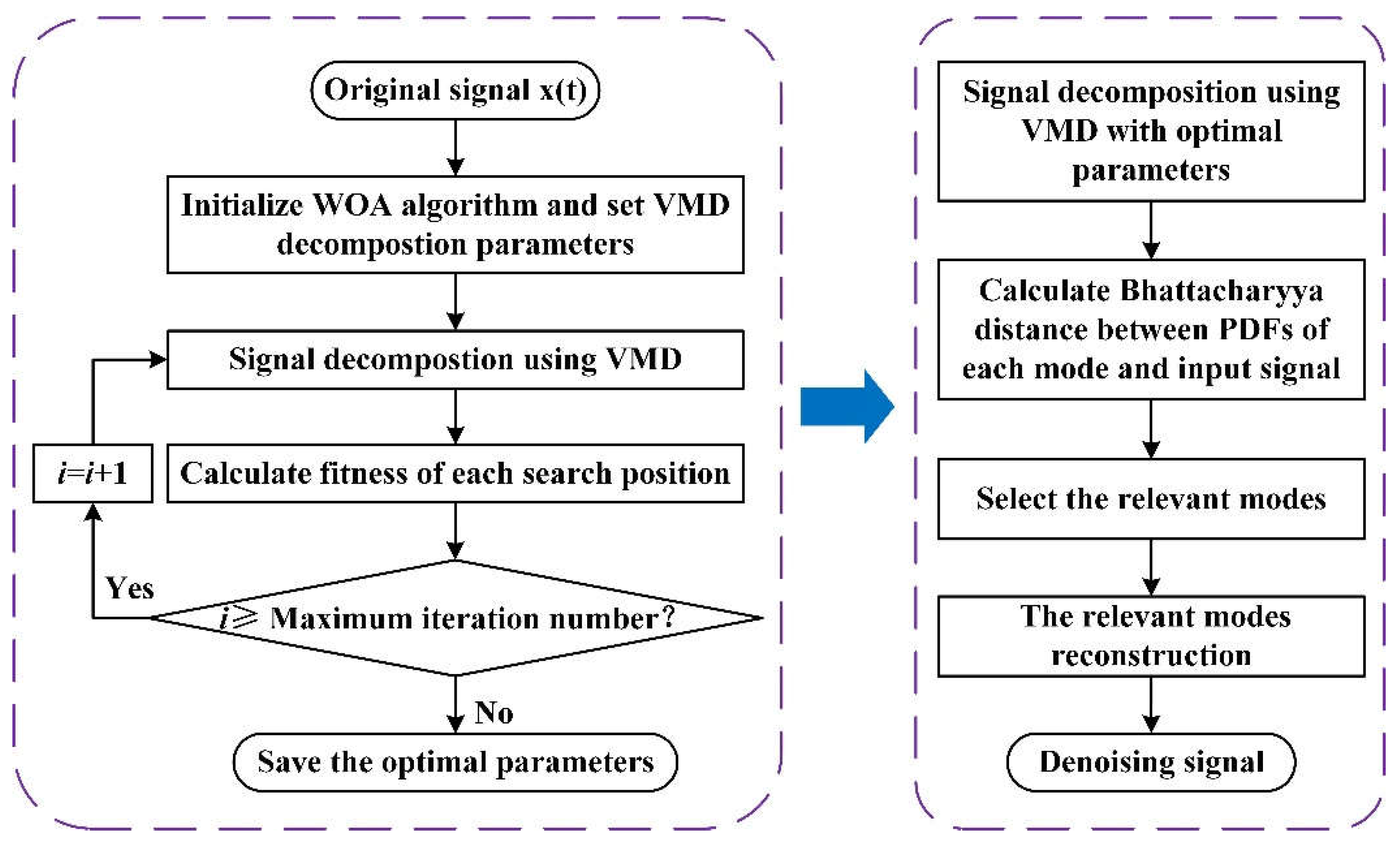
| 2: Update |
| 3: Update |
| 4: Update until convergence . |
3. Principle of the VMD-WOA Model for Noise Reduction
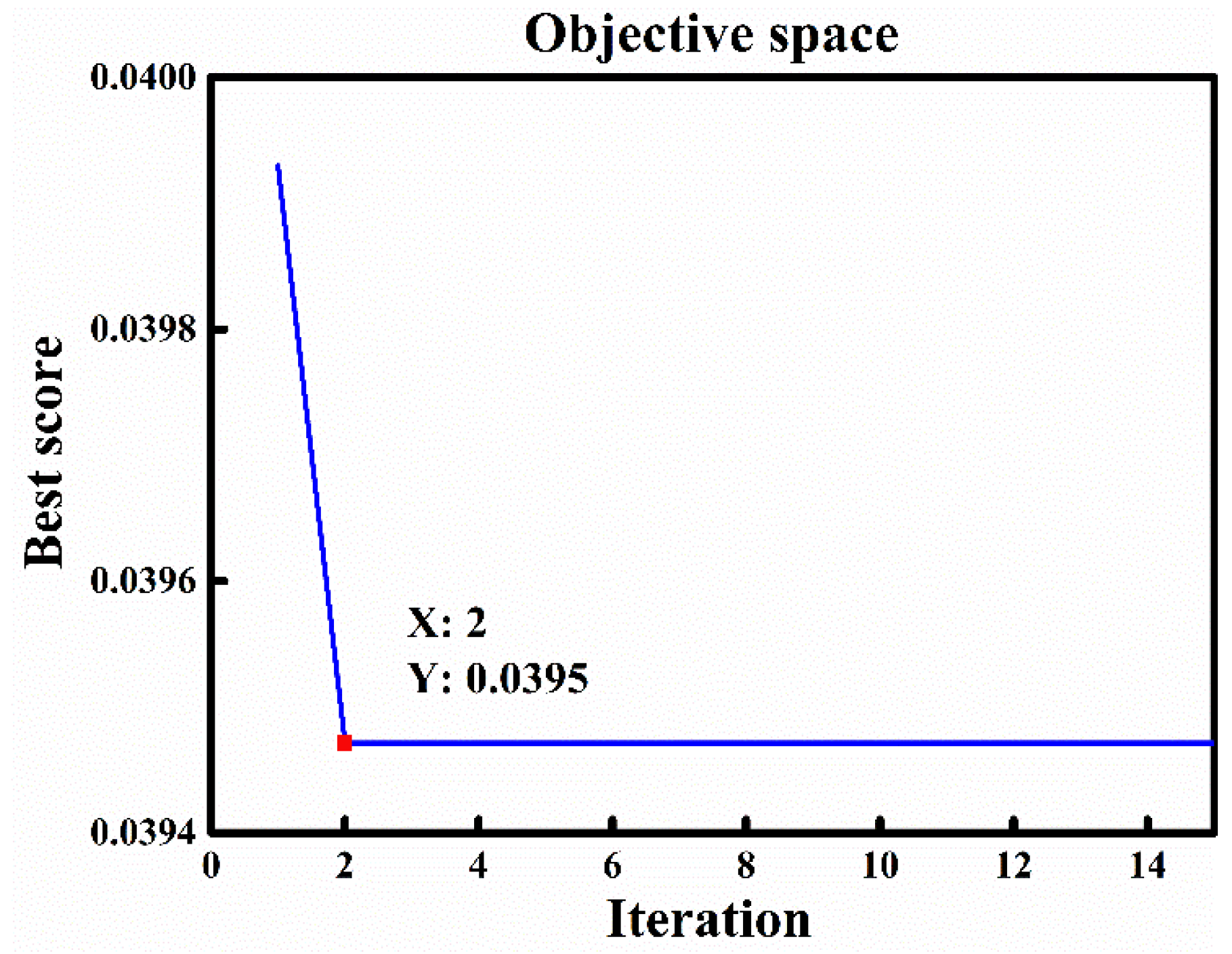
3.1. Optimization of VMD Parameters Based on the WOA
| Algorithm 2. Pseudocode for WOA |
| Initialize the whale population position X |
| Calculate the fitness of each search agent |
| X* is the best search agent while (i < maximum iteration number) for each search agent Update a, A, C, l, and p if1 (p < 0.5) if2 (|A| < 1) Update the position of the current search agent by the Equation (9) else if2 (|A| ≥ 1) Select a random search agent (Xrand) Update the position of the current search agent by the Equation (14) end if2 else if1 (p ≥ 0.5) Update the position of the current search by the Equation (12) end if1 |
| end for Check if any search agent goes beyond the search space and amend it Calculate the fitness of each search agent Update X* if there is a better solution i = i + 1 end while return X* |
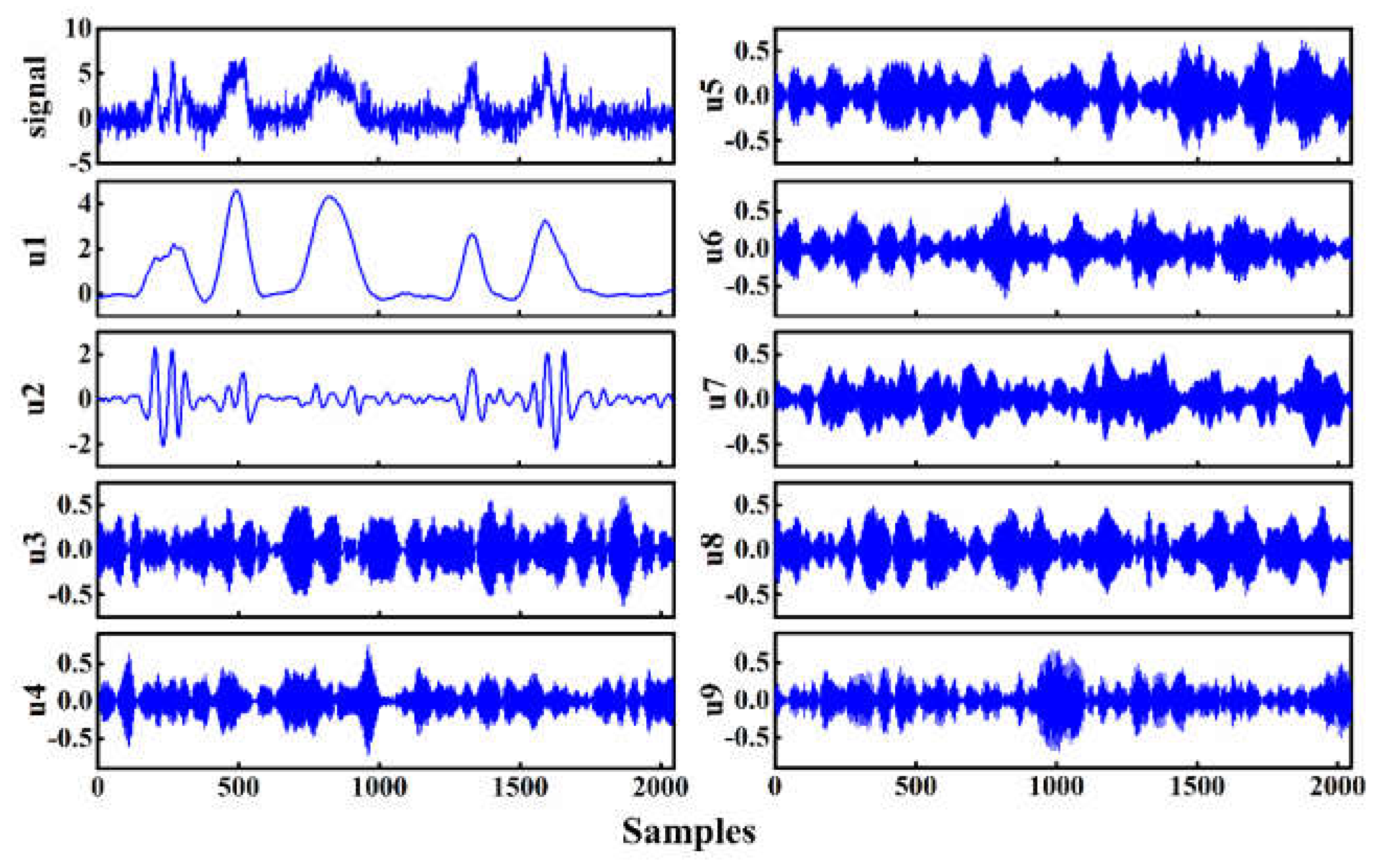
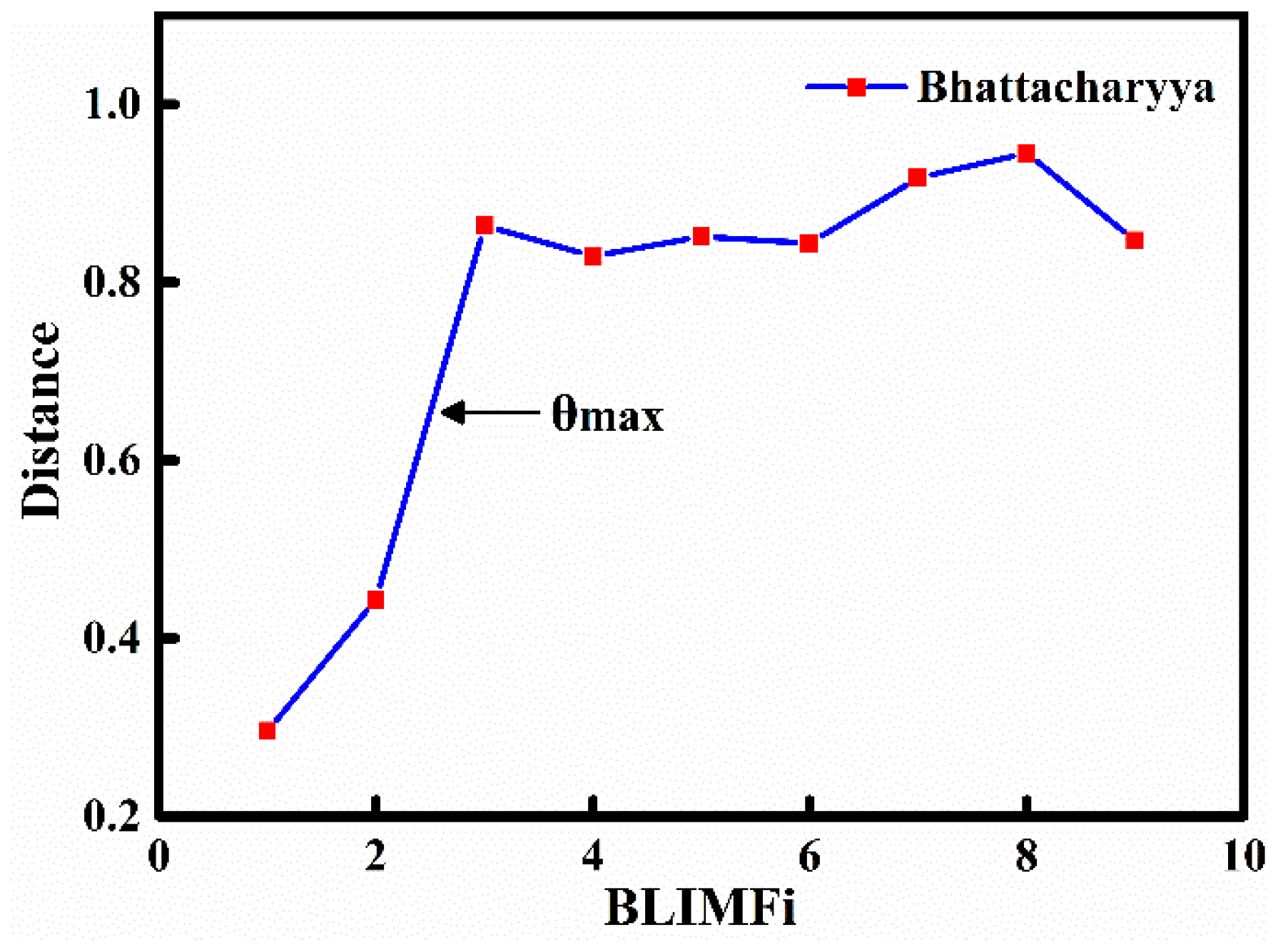
3.2. Identification of Relevant Modes
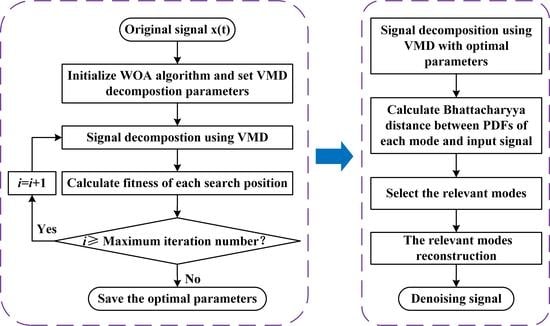
3.3. Proposed VMD-WOA Methodology
4. Results and Discussion
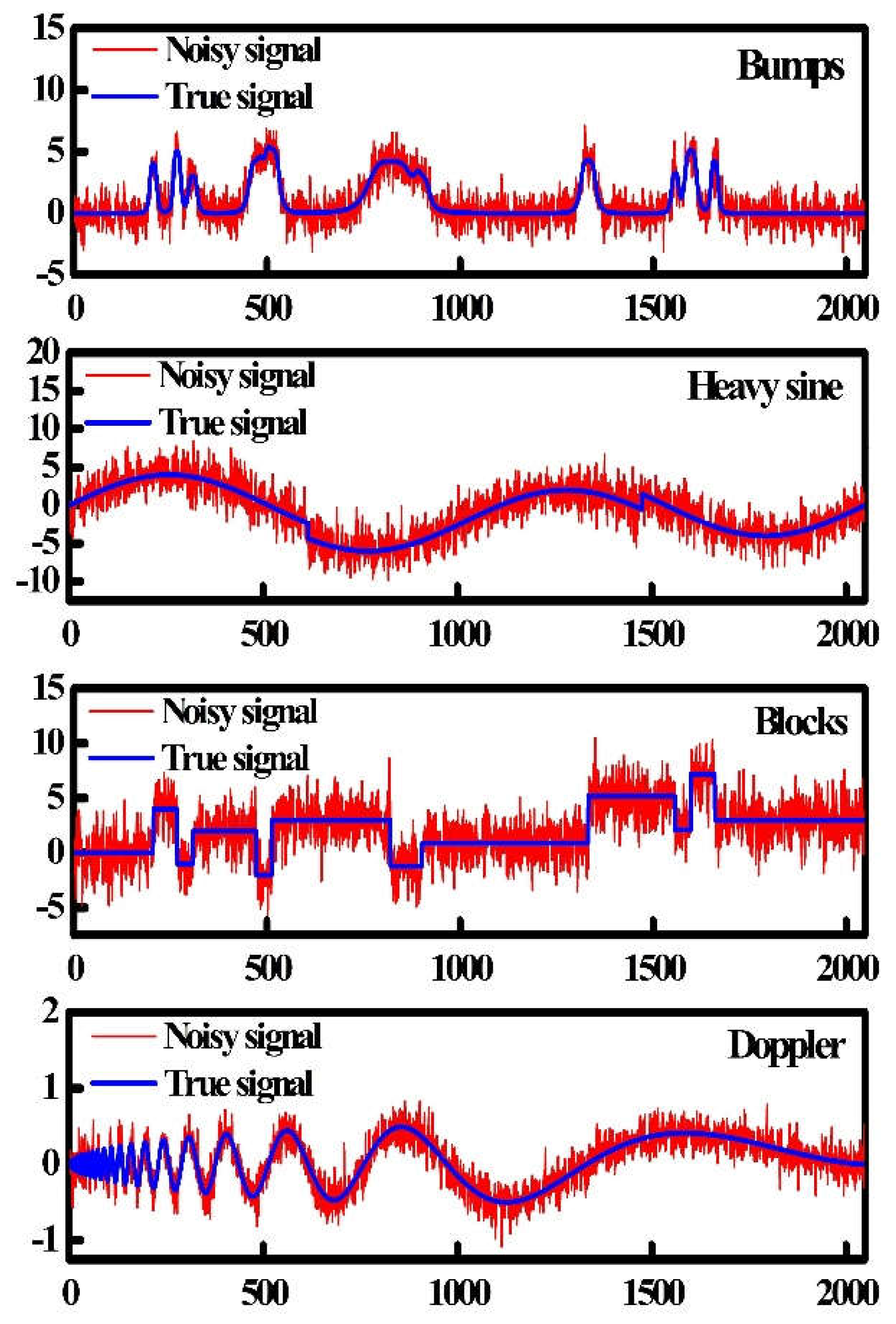
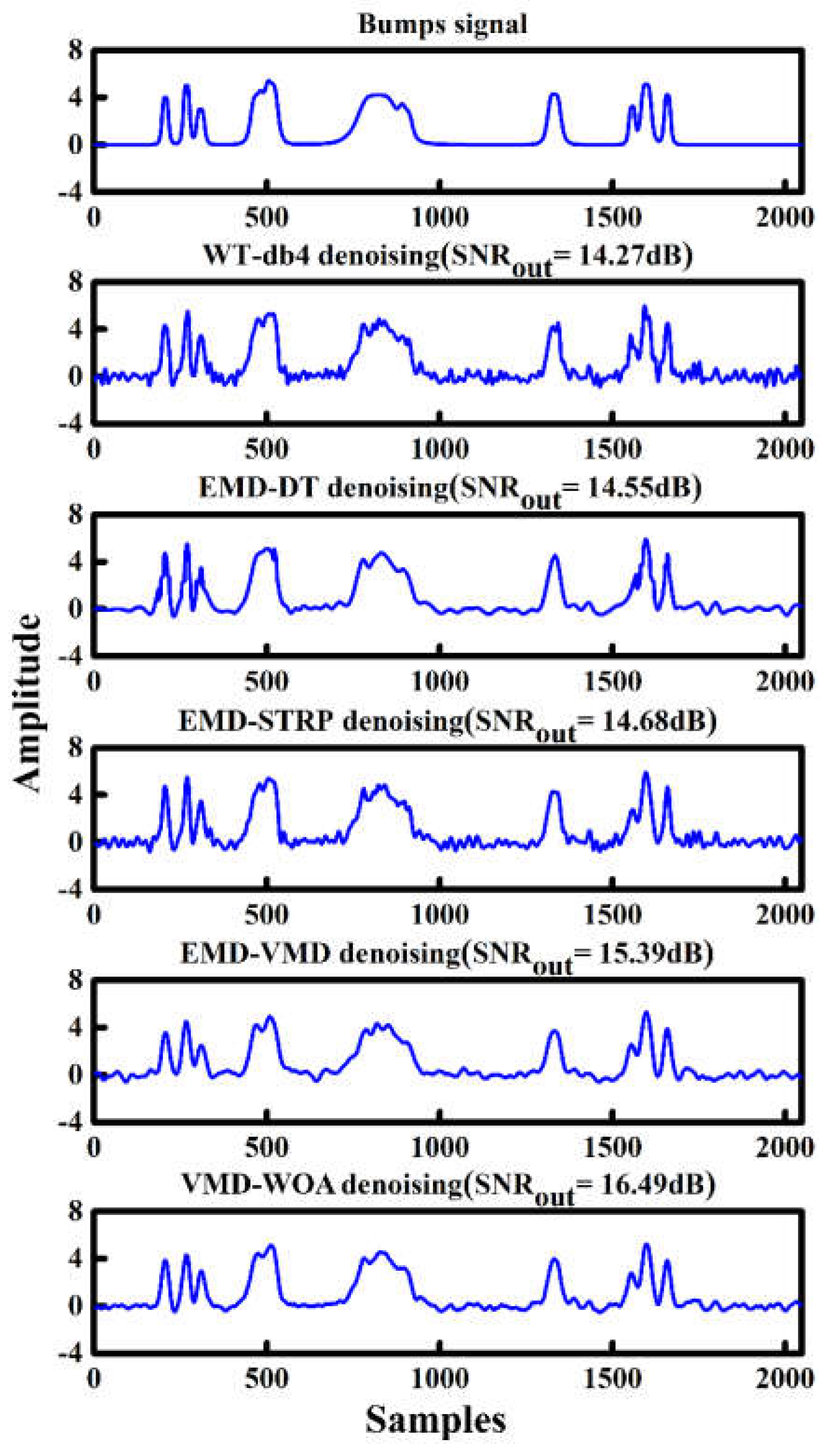
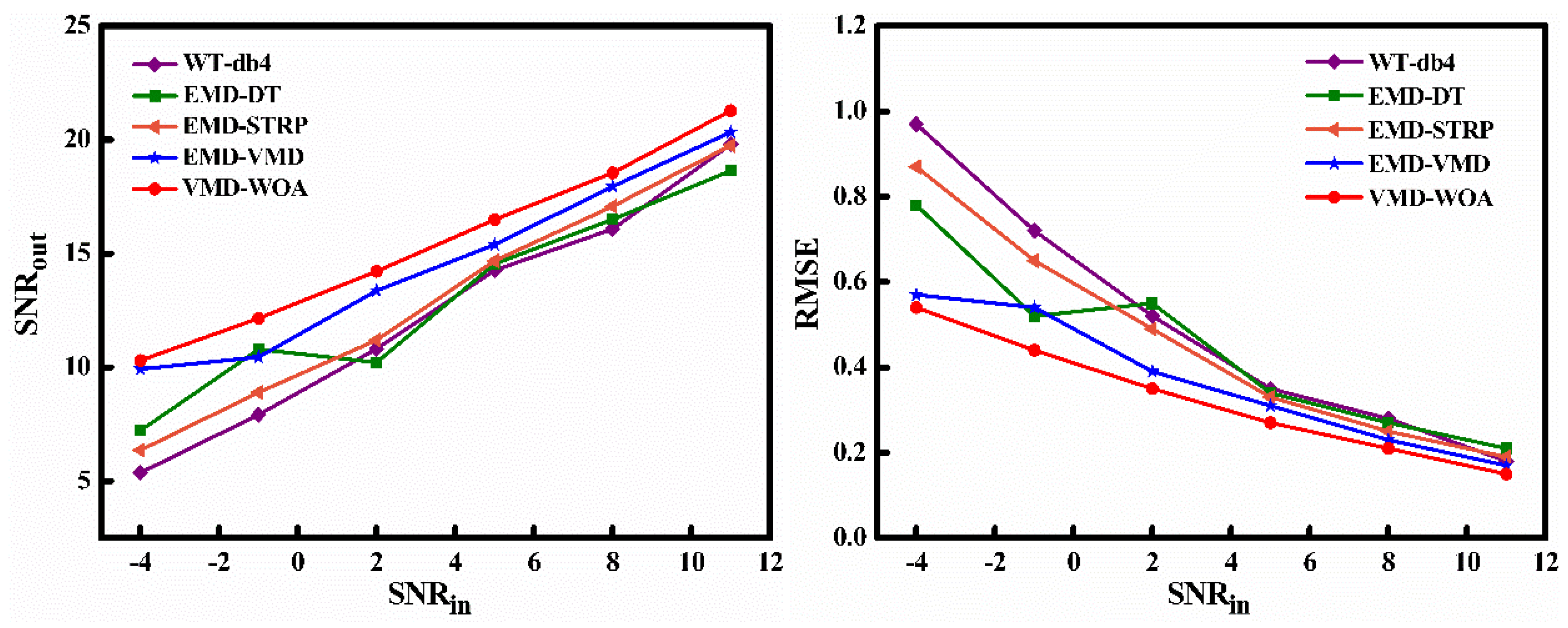
4.1. Experiments with Simulated Signals
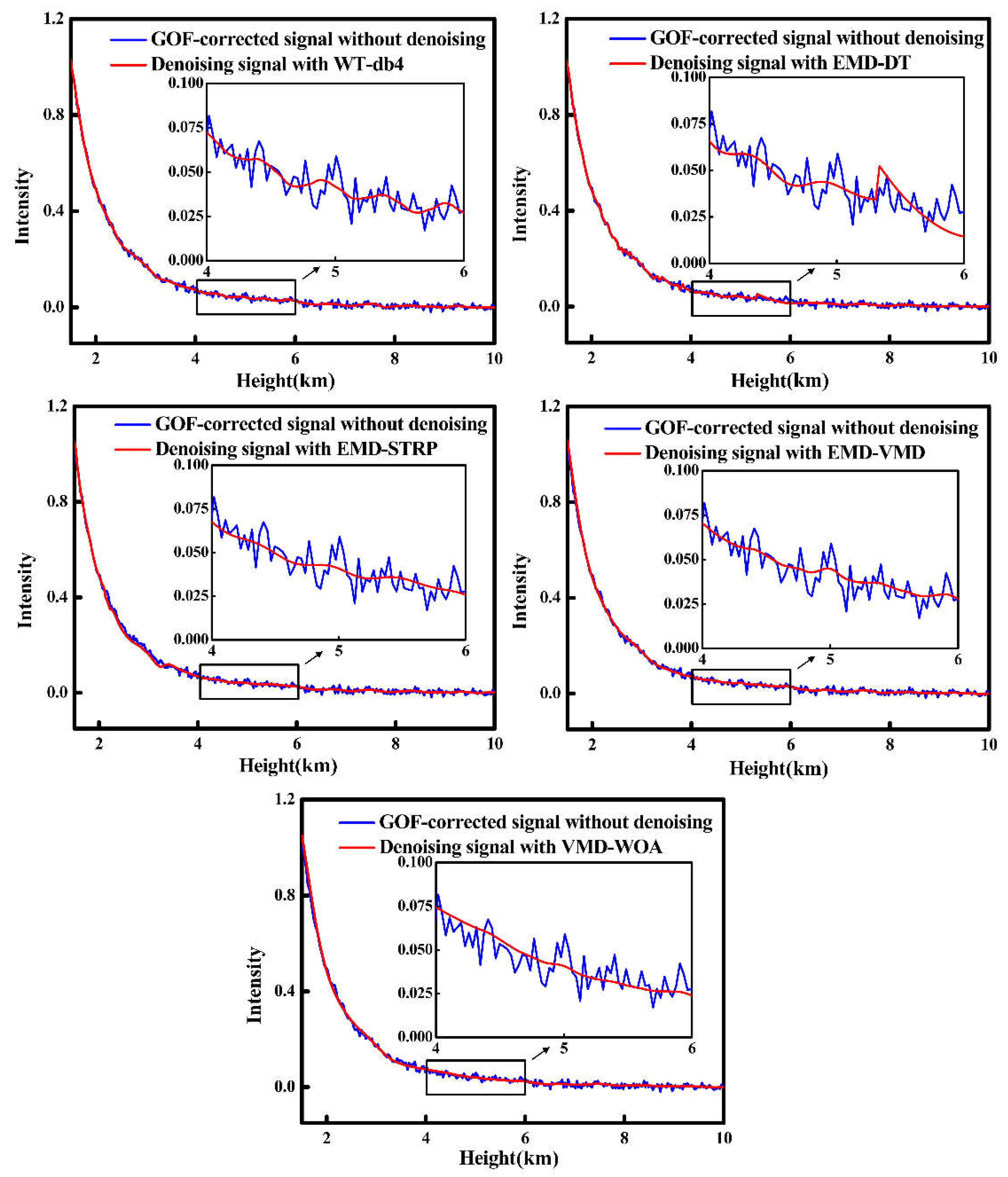
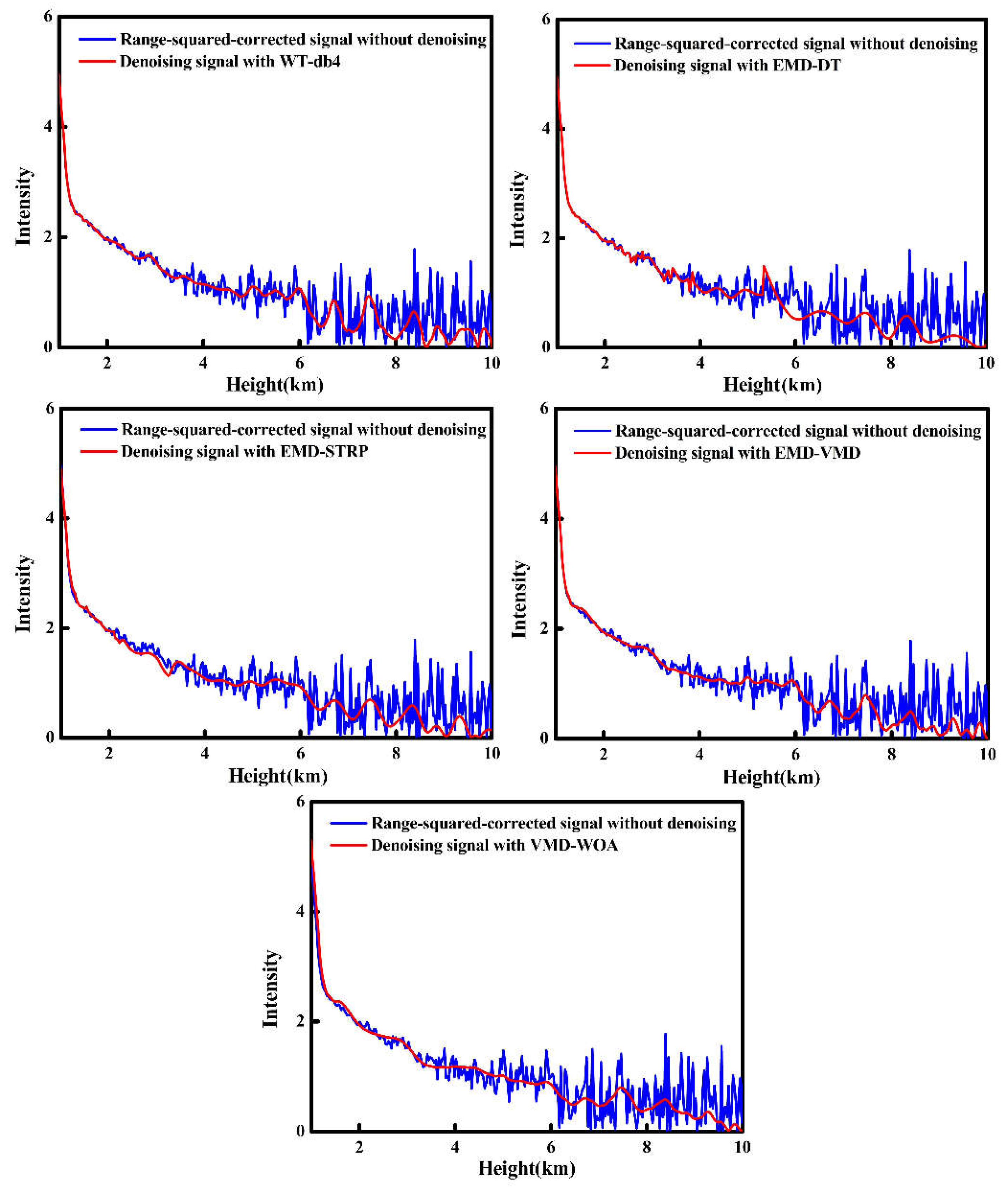
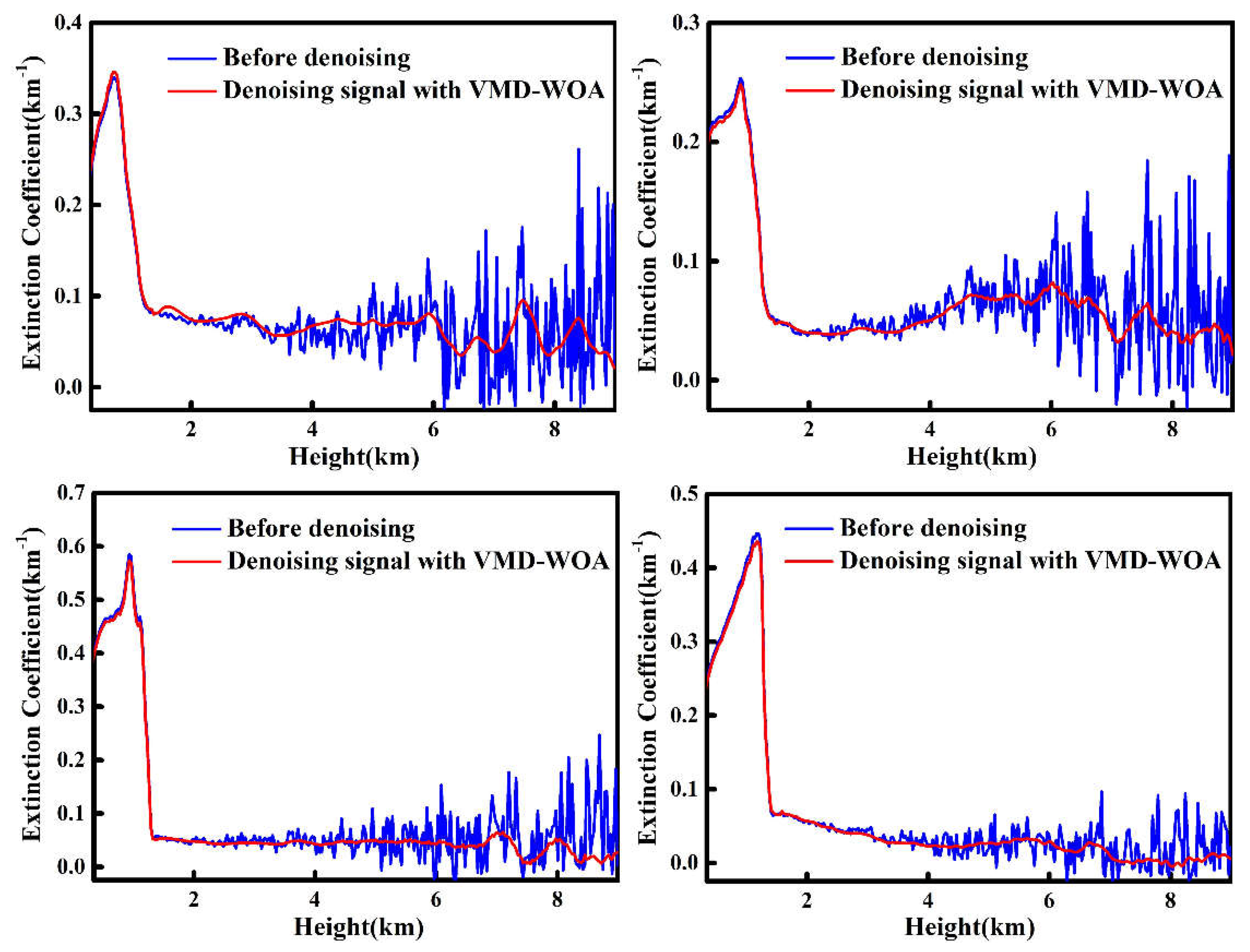
4.2. Experiments on a Lidar Echo Signal
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mao, J. Noise reduction for lidar returns using local threshold wavelet analysis. Opt. Quant. Electron. 2012, 43, 59–68. [Google Scholar] [CrossRef]
- Veerabuthiran, S.; Razdan, A.K.; Jindal, M.K.; Dubey, D.K.; Sharma, R.C. Mie lidar observations of lower tropospheric aerosols and clouds. Spectrochim. Acta A 2011, 84, 32–36. [Google Scholar] [CrossRef] [PubMed]
- Xia, H.; Shangguan, M.; Wang, C.; Shentu, G.; Qiu, J.; Zhang, Q.; Dou, X.; Pan, J. Micro-pulse upconversion Doppler lidar for wind and visibility detection in the atmospheric boundary layer. Opt. Lett. 2016, 41, 5218. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Hua, D.; Wang, Y.; Yan, Q.; Li, S.; Li, Y.; Wang, H. Improvement of the signal to noise ratio of Lidar echo signal based on wavelet de-noising technique. Opt. Lasers Eng. 2013, 51, 961–966. [Google Scholar] [CrossRef]
- Tian, P.; Cao, X.; Liang, J.; Zhang, L.; Yi, N.; Wang, L.; Cheng, X. Improved empirical mode decomposition based denoising method for lidar signals. Opt. Commun. 2014, 325, 54–59. [Google Scholar] [CrossRef]
- Rye, B.J.; Hardesty, R.M. Nonlinear Kalman filtering techniques for incoherent backscatter lidar: Return power and log power estimation. Appl. Opt. 1989, 28, 3908–3917. [Google Scholar] [CrossRef] [PubMed]
- Rocadenbosch, F.; Soriano, C.; Comerón, A.; Baldasano, J. Lidar inversion of atmospheric backscatter and extinction-to-backscatter ratios by use of a Kalman filter. Appl. Opt. 1999, 38, 3175–3189. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Liu, Z.; Liu, B. Enhancement of lidar backscatters signal-to-noise ratio using empirical mode decomposition method. Opt. Commun. 2006, 267, 137–144. [Google Scholar] [CrossRef]
- Li, M.; Jiang, L.; Xiong, X. A novel EMD selecting thresholding method based on multiple iteration for denoising LIDAR signal. Opt. Rev. 2015, 22, 477–482. [Google Scholar] [CrossRef]
- Tang, B.; Dong, S.; Song, T. Method for eliminating mode mixing of empirical mode decomposition based on the revised blind source separation. Signal Process. 2012, 92, 248–258. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Wang, Y.; Markert, R.; Xiang, J.; Zheng, W. Research on variational mode decomposition and its application in detecting rub-impact fault of the rotor system. Mech. Syst. Signal Process. 2015, 60–61, 243–251. [Google Scholar] [CrossRef]
- Wang, D.; Luo, H.; Grunder, O.; Lin, Y. Multi-step ahead wind speed forecasting using an improved wavelet neural network combining variational mode decomposition and phase space reconstruction. Renew. Energy 2017, 113, 1345–1358. [Google Scholar] [CrossRef]
- An, X.; Yang, J. Denoising of hydropower unit vibration signal based on variational mode decomposition and approximate entropy. Trans. Inst. Meas. Control. 2015, 38, 282–292. [Google Scholar] [CrossRef]
- Yi, C.; Lv, Y.; Dang, Z. A Fault Diagnosis Scheme for Rolling Bearing Based on Particle Swarm Optimization in Variational Mode Decomposition. Shock Vib. 2016, 2016, 1–10. [Google Scholar] [CrossRef]
- Li, Z.; Chen, J.; Zi, Y.; Pan, J. Independence-oriented VMD to identify fault feature for wheel set bearing fault diagnosis of high speed locomotive. Mech. Syst. Signal Process. 2017, 85, 512–529. [Google Scholar] [CrossRef]
- Shi, P.; Yang, W. Precise feature extraction from wind turbine condition monitoring signals by using optimised variational mode decomposition. IET Renew. Power Gen. 2017, 11, 245–252. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J. Research on Ship-Radiated Noise Denoising Using Secondary Variational Mode Decomposition and Correlation Coefficient. Sensors 2018, 18, 48. [Google Scholar]
- Li, Y.; Li, Y.; Chen, X.; Yu, J. Denoising and Feature Extraction Algorithms Using NPE Combined with VMD and Their Applications in Ship-Radiated Noise. Symmetry 2017, 9, 256. [Google Scholar] [CrossRef]
- Ma, W.; Yin, S.; Jiang, C.; Zhang, Y. Variational mode decomposition denoising combined with the Hausdorff distance. Rev. Sci. Instrum. 2017, 88, 35109. [Google Scholar] [CrossRef]
- Chang, J.; Zhu, L.; Li, H.; Xu, F.; Liu, B.; Yang, Z. Noise reduction in Lidar signal using correlation-based EMD combined with soft thresholding and roughness penalty. Opt. Commun. 2018, 407, 290–295. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, G.; Li, M.; Yin, H. Variational mode decomposition denoising combined the detrended fluctuation analysis. Signal Process. 2016, 125, 349–364. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Hasanien, H.M. Performance improvement of photovoltaic power systems using an optimal control strategy based on whale optimization algorithm. Electr. Power Syst. Res. 2018, 157, 168–176. [Google Scholar] [CrossRef]
- Huang, J.; Hu, X.; Geng, X. An intelligent fault diagnosis method of high voltage circuit breaker based on improved EMD energy entropy and multi-class support vector machine. Electr. Power Syst. Res. 2011, 81, 400–407. [Google Scholar] [CrossRef]
- Li, K.; Su, L.; Wu, J.; Wang, H.; Chen, P. A Rolling Bearing Fault Diagnosis Method Based on Variational Mode Decomposition and an Improved Kernel Extreme Learning Machine. Appl. Sci. 2017, 7, 1004. [Google Scholar] [CrossRef]
- Komaty, A.; Boudraa, A.; Augier, B.; Dare-Emzivat, D. EMD-Based Filtering Using Similarity Measure Between Probability Density Functions of IMFs. IEEE Trans. Instrum. Meas. 2014, 63, 27–34. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNRin | −4 dB | −1 dB | 2 dB | 5 dB | 8 dB | 11 dB |
|---|---|---|---|---|---|---|
| (a) Heavy Sine | ||||||
| WT-db4 | 5.04/1.73 | 7.69/1.27 | 10.40/0.93 | 14.31/0.59 | 16.86/0.44 | 20.19/0.30 |
| EMD-DT | 8.67/1.14 | 11.38/0.83 | 13.60/0.85 | 17.06/0.43 | 21.29/0.27 | 22.93/0.22 |
| EMD-STRP | 9.03/1.10 | 11.49/1.04 | 13.87/0.82 | 17.36/0.42 | 21.39/0.26 | 23.02/0.22 |
| EMD-VMD | 11.30/0.84 | 14.10/0.61 | 17.89/0.39 | 19.61/0.32 | 22.39/0.23 | 24.35/0.19 |
| VMD-WOA | 12.59/0.73 | 16.80/0.45 | 19.25/0.34 | 21.78/0.24 | 24.23/0.19 | 25.59/0.16 |
| (b) Blocks | ||||||
| WT-db4 | 4.76/1.72 | 8.16/1.16 | 10.48/0.89 | 13.93/0.60 | 15.72/0.49 | 18.14/0.37 |
| EMD-DT | 7.75/1.22 | 10.19/0.92 | 12.43/0.71 | 14.76/0.54 | 15.67/0.49 | 16.37/0.45 |
| EMD-STRP | 7.87/1.20 | 10.30/0.91 | 12.50/0.70 | 14.68/0.55 | 15.40/0.50 | 17.55/0.39 |
| EMD-VMD | 10.90/0.85 | 11.93/0.75 | 13.81/0.61 | 15.26/0.51 | 16.08/0.47 | 17.80/0.38 |
| VMD-WOA | 11.02/0.83 | 12.30/0.72 | 14.01/0.59 | 15.85/0.48 | 16.27/0.46 | 18.25/0.36 |
| (c) Doppler | ||||||
| WT-db4 | 4.98/0.167 | 8.62/0.109 | 10.81/0.082 | 13.25/0.064 | 15.06/0.052 | 18.38/0.035 |
| EMD-DT | 6.74/0.127 | 10.38/0.089 | 12.61/0.069 | 14.89/0.053 | 16.28/0.045 | 18.57/0.034 |
| EMD-STRP | 6.68/0.132 | 10.55/0.087 | 11.43/0.079 | 13.55/0.062 | 14.89/0.053 | 17.69/0.038 |
| EMD-VMD | 9.76/0.095 | 11.70/0.076 | 12.35/0.071 | 14.91/0.053 | 16.54/0.044 | 18.45/0.035 |
| VMD-WOA | 10.28/0.089 | 12.30/0.071 | 13.45/0.062 | 15.04/0.052 | 17.01/0.041 | 19.41/0.031 |
| WT-db4 | EMD-DT | EMD-STRP | EMD-VMD | VMD-WOA | |
|---|---|---|---|---|---|
| SNR (dB) | 20.67 | 20.36 | 22.25 | 22.61 | 23.92 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Chang, J.; Xu, F.; Liu, Z.; Yang, Z.; Zhang, L.; Zhang, S.; Mao, R.; Dou, X.; Liu, B. Efficient Lidar Signal Denoising Algorithm Using Variational Mode Decomposition Combined with a Whale Optimization Algorithm. Remote Sens. 2019, 11, 126. https://doi.org/10.3390/rs11020126
Li H, Chang J, Xu F, Liu Z, Yang Z, Zhang L, Zhang S, Mao R, Dou X, Liu B. Efficient Lidar Signal Denoising Algorithm Using Variational Mode Decomposition Combined with a Whale Optimization Algorithm. Remote Sensing. 2019; 11(2):126. https://doi.org/10.3390/rs11020126
Chicago/Turabian StyleLi, Hongxu, Jianhua Chang, Fan Xu, Zhenxing Liu, Zhenbo Yang, Luyao Zhang, Shuyi Zhang, Renxiang Mao, Xiaolei Dou, and Binggang Liu. 2019. "Efficient Lidar Signal Denoising Algorithm Using Variational Mode Decomposition Combined with a Whale Optimization Algorithm" Remote Sensing 11, no. 2: 126. https://doi.org/10.3390/rs11020126
APA StyleLi, H., Chang, J., Xu, F., Liu, Z., Yang, Z., Zhang, L., Zhang, S., Mao, R., Dou, X., & Liu, B. (2019). Efficient Lidar Signal Denoising Algorithm Using Variational Mode Decomposition Combined with a Whale Optimization Algorithm. Remote Sensing, 11(2), 126. https://doi.org/10.3390/rs11020126