A Simultaneous Imaging Scheme of Stationary Clutter and Moving Targets for Maritime Scenarios with the First Chinese Dual-Channel Spaceborne SAR Sensor


 ,
,
Abstract
:1. Introduction
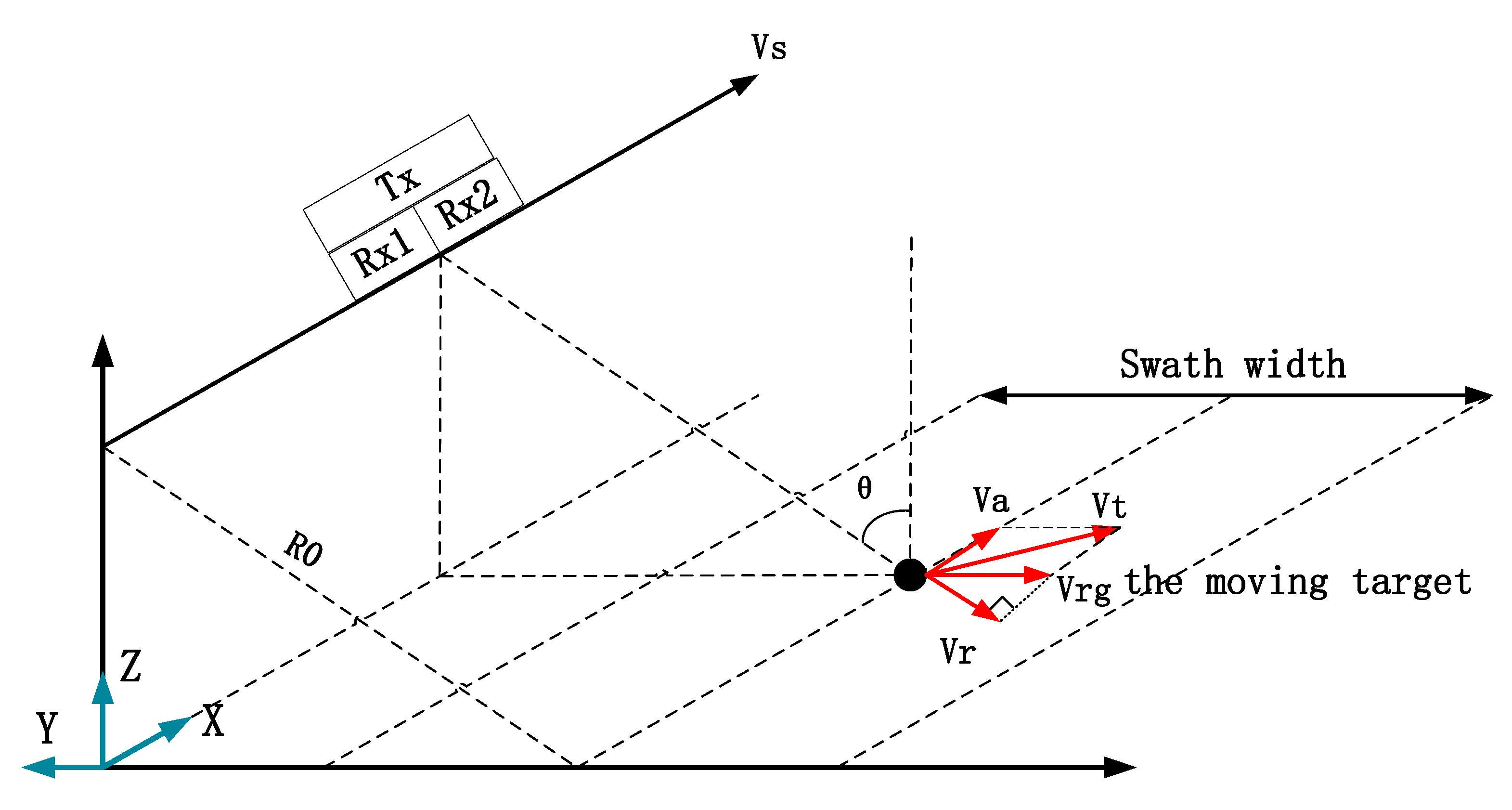
2. Geometry Model and Signal Model
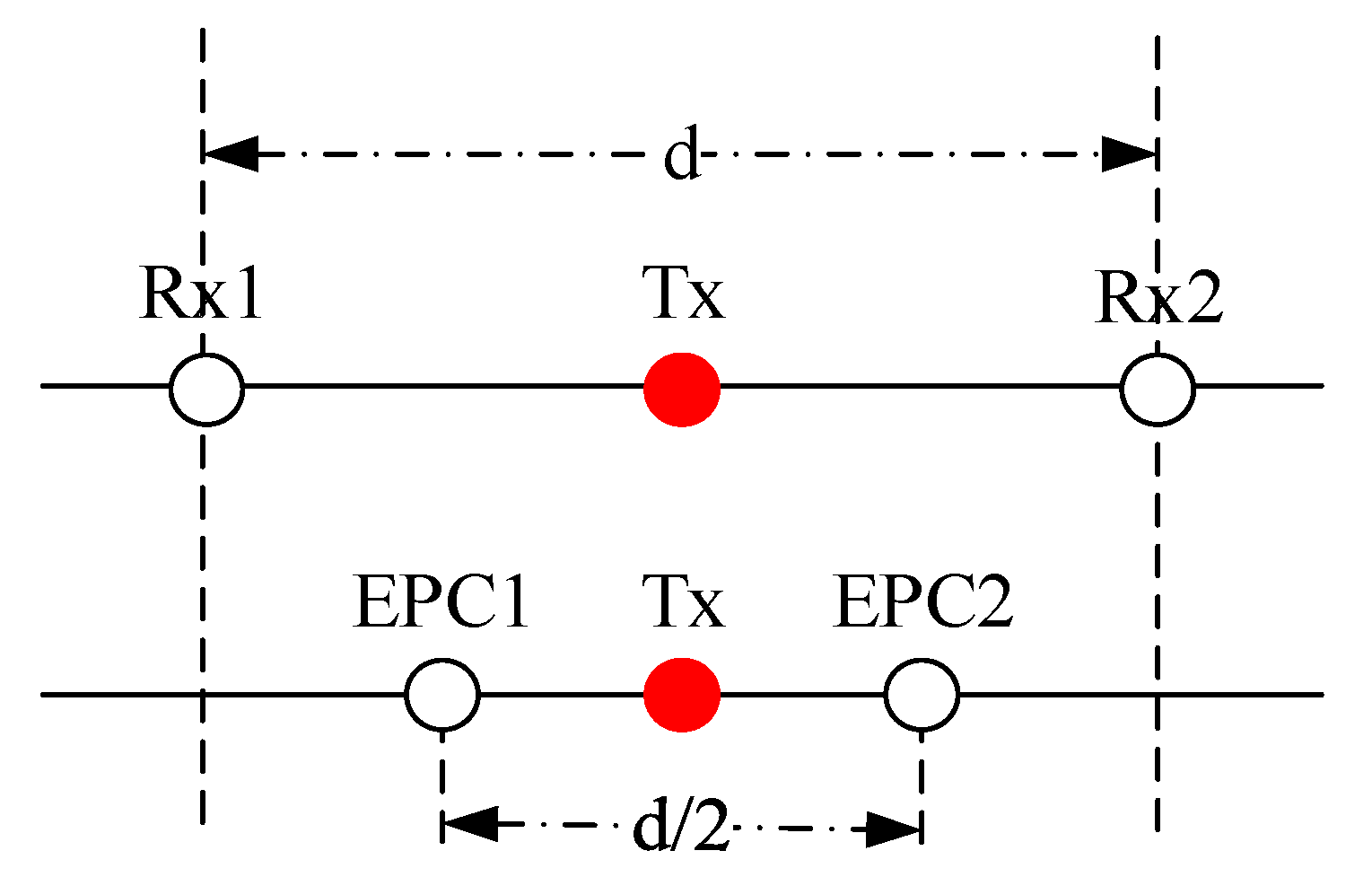
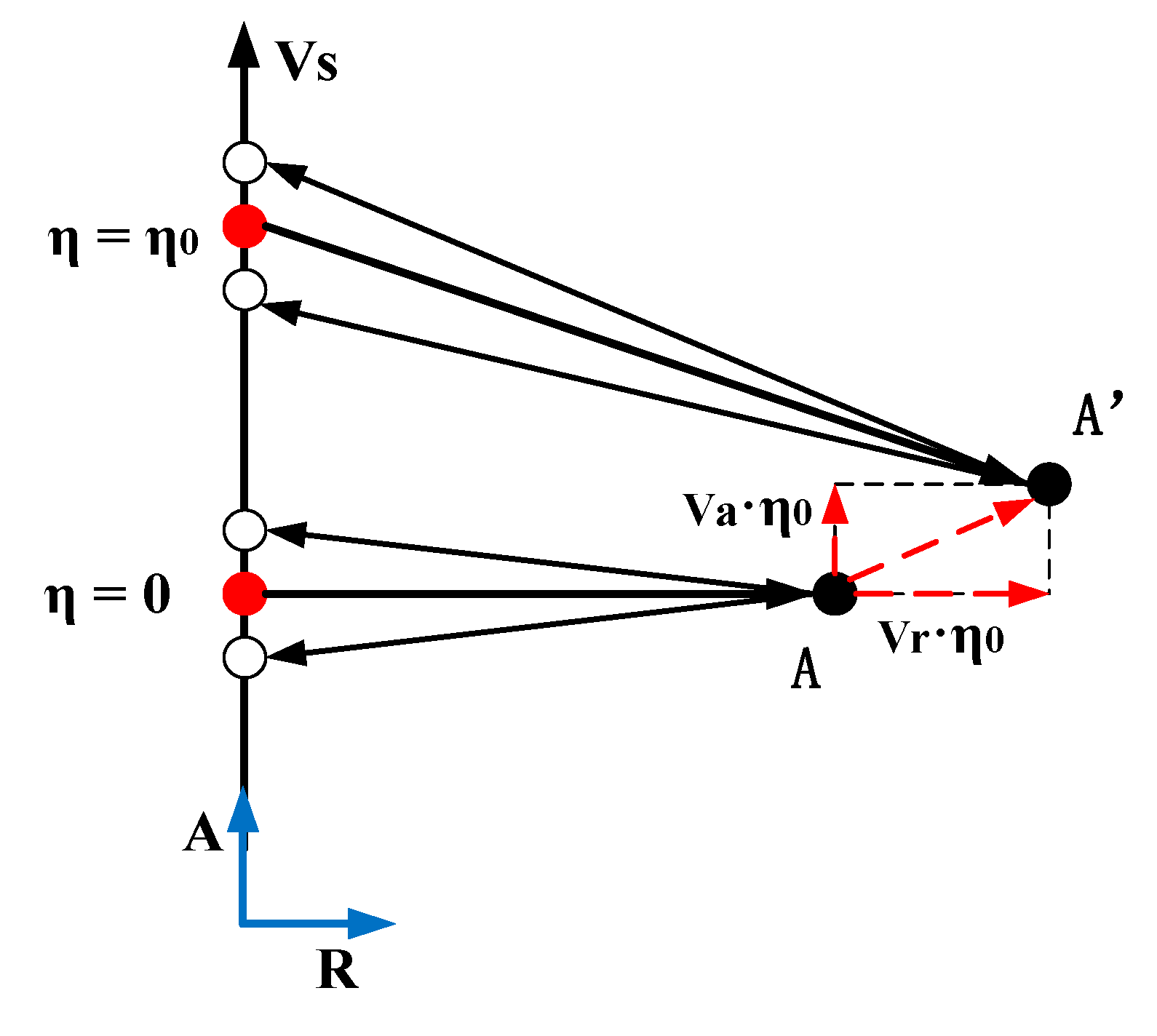
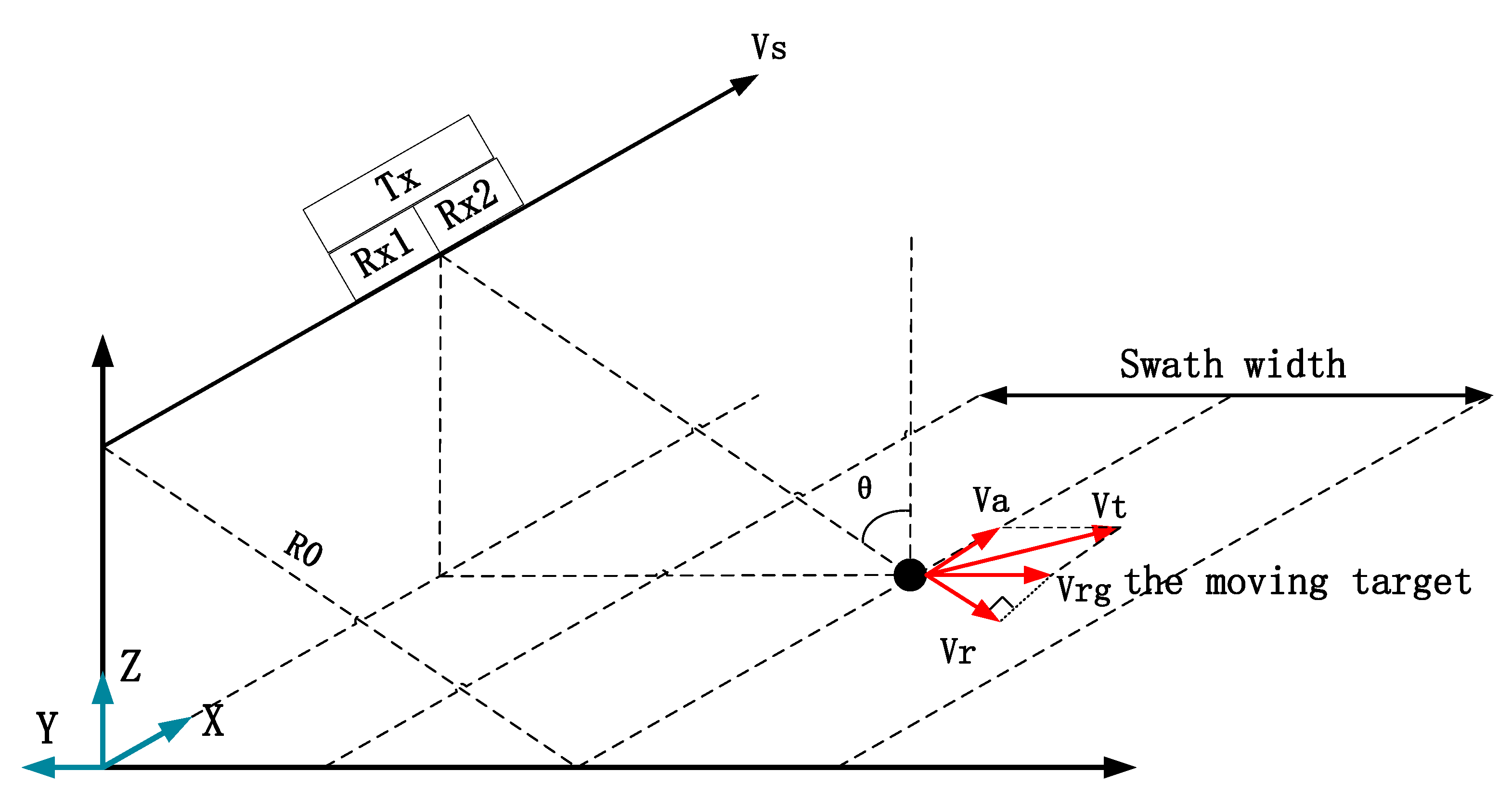
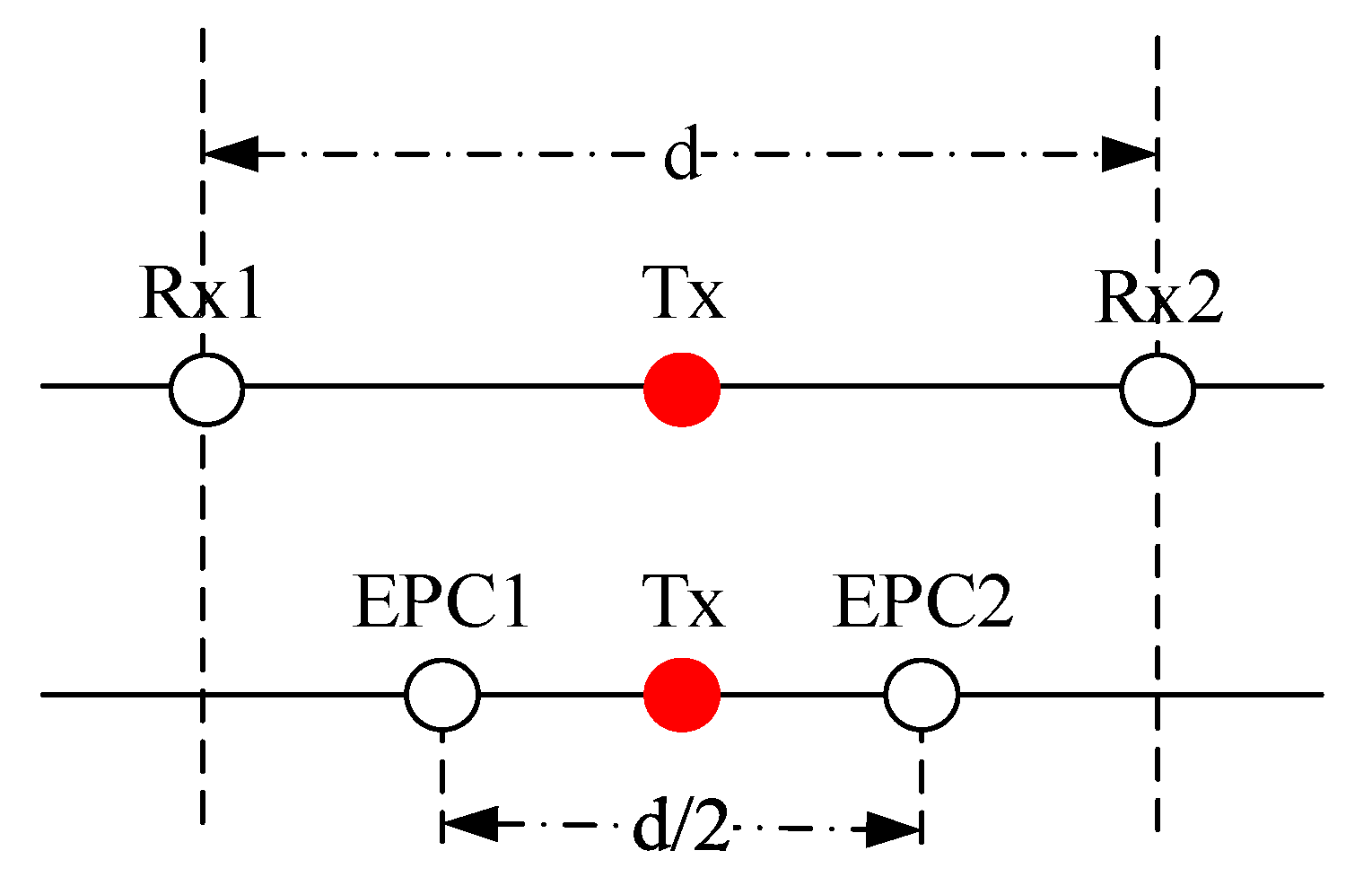
2.1. Imaging Geometry Model of Dual Receive Channel Mode
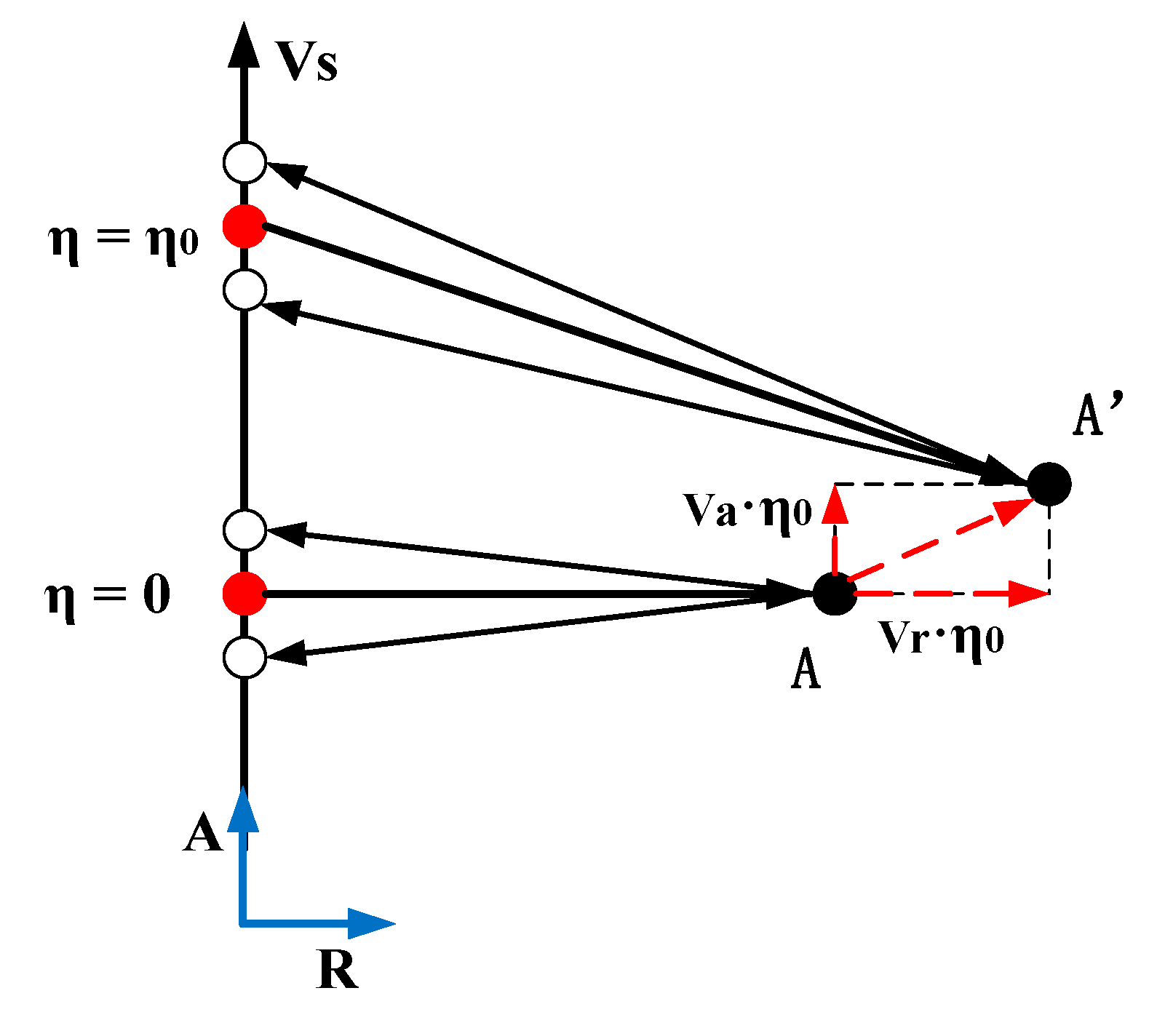
2.2. Signal Model
| Index of receive channels, , | |
| Range time and azimuth time, respectively, | |
| The closest slant range of the moving target, | |
| Platform velocity, | |
| Radial velocity and along-track velocity, respectively, | |
| Azimuth position of -th EPC, | |
| Distance between adjacent actual receive channels, | |
| Pulse width and chirp rate of the transmitted signal, respectively, | |
| Synthetic aperture time, | |
| PRF | Pulse repetition frequency for each channel, |
| The wavelength of the radar signal, | |
| Light speed. |
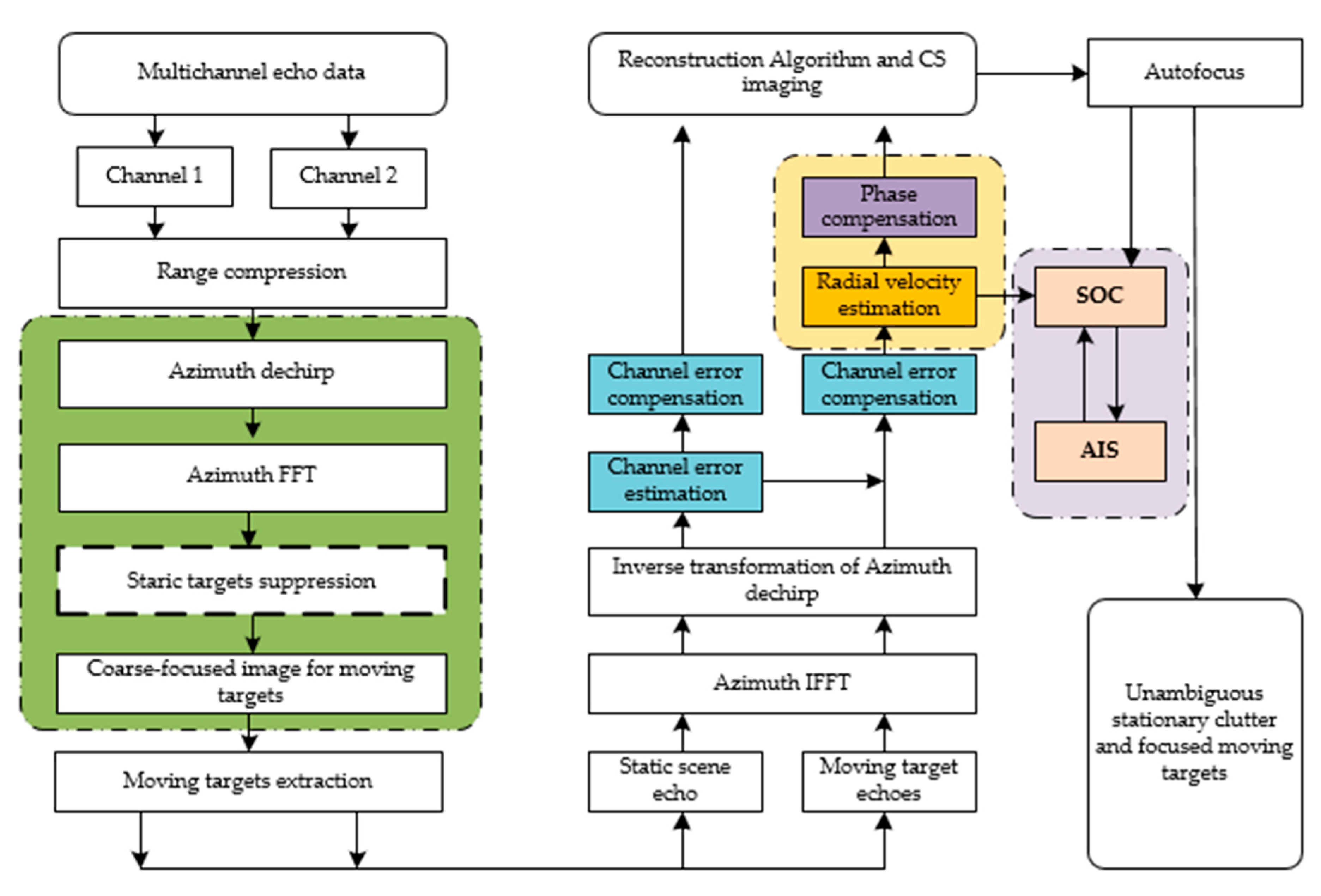
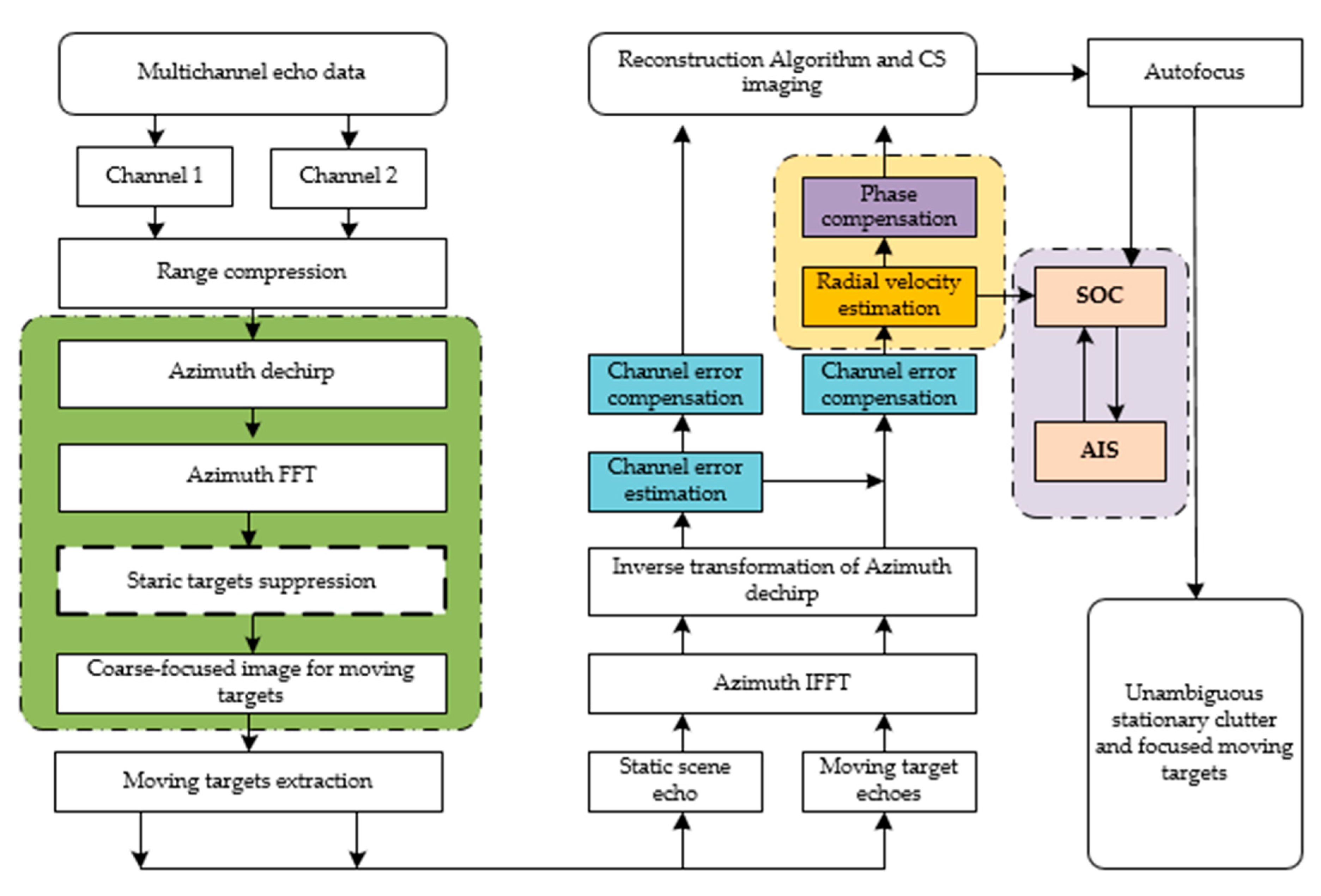
3. Processing Method
3.1. Extraction of the Moving Targets Echoes
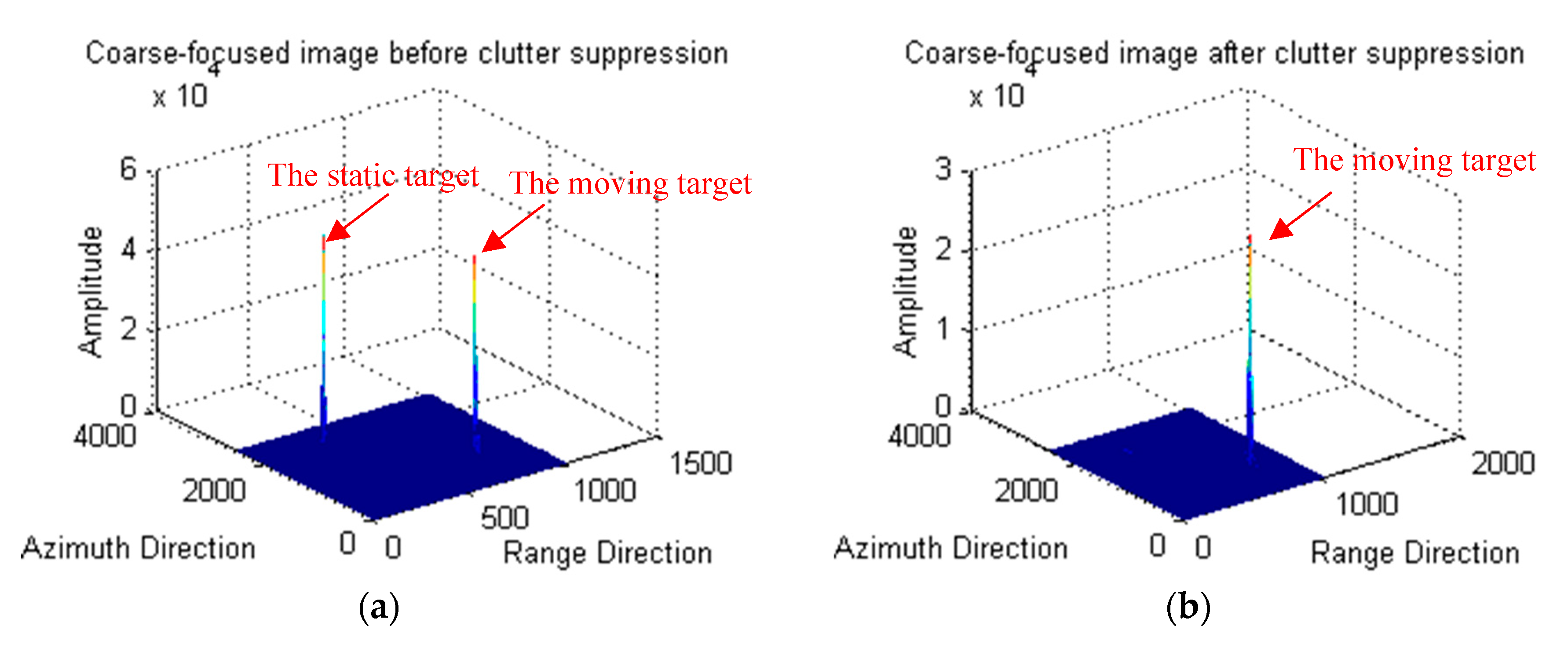
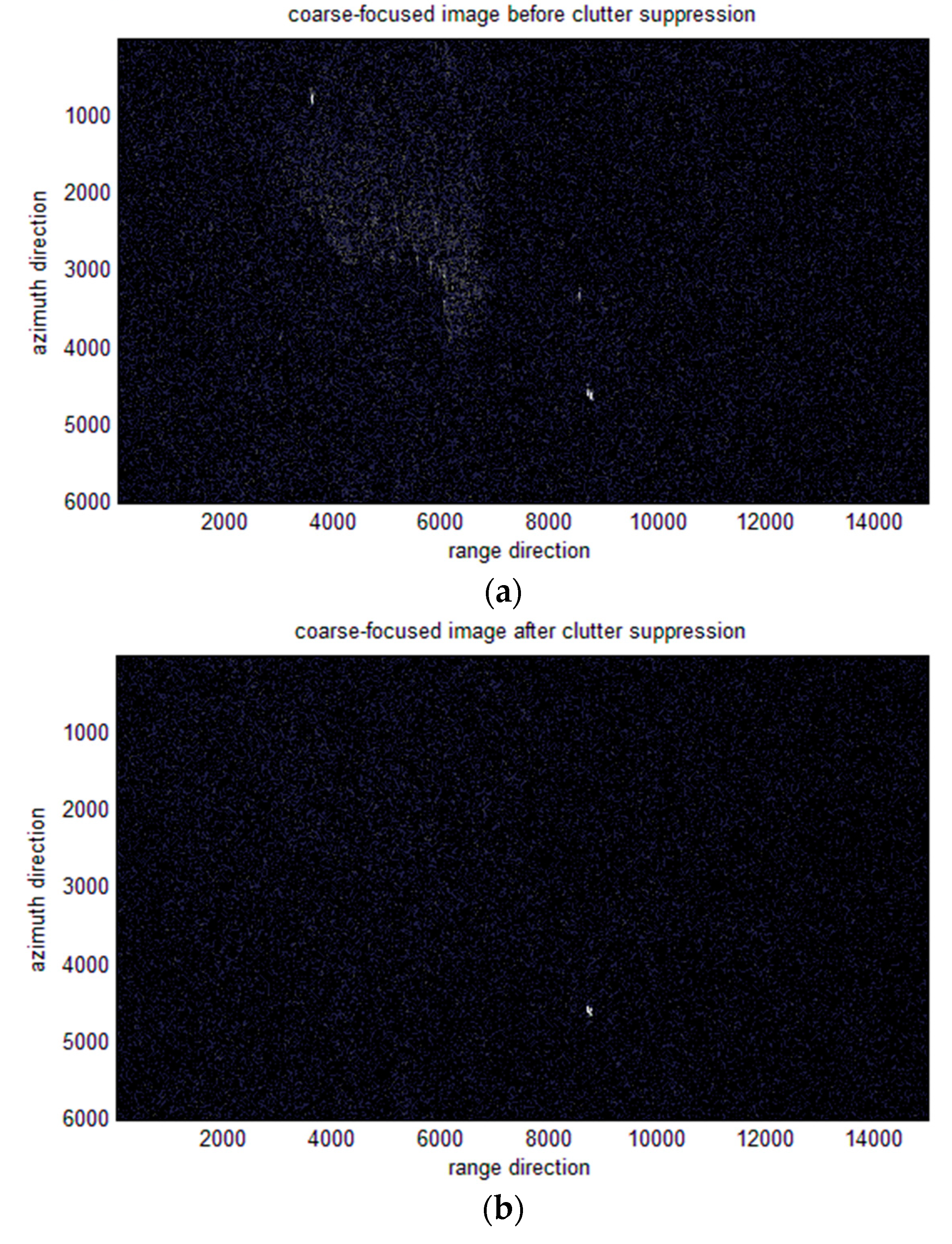
3.1.1. Stationary Targets Suppression
3.1.2. Extraction of the Moving Target Echoes
3.2. Two Methods to Estimate Radial Velocity
- 1)
- Azimuth inverse Fourier transform,
- 2)
- Inverse transform of azimuth dechirp operation, where the reference function becomes
3.2.1. TDC Method
3.2.2. ML-Based Algorithm
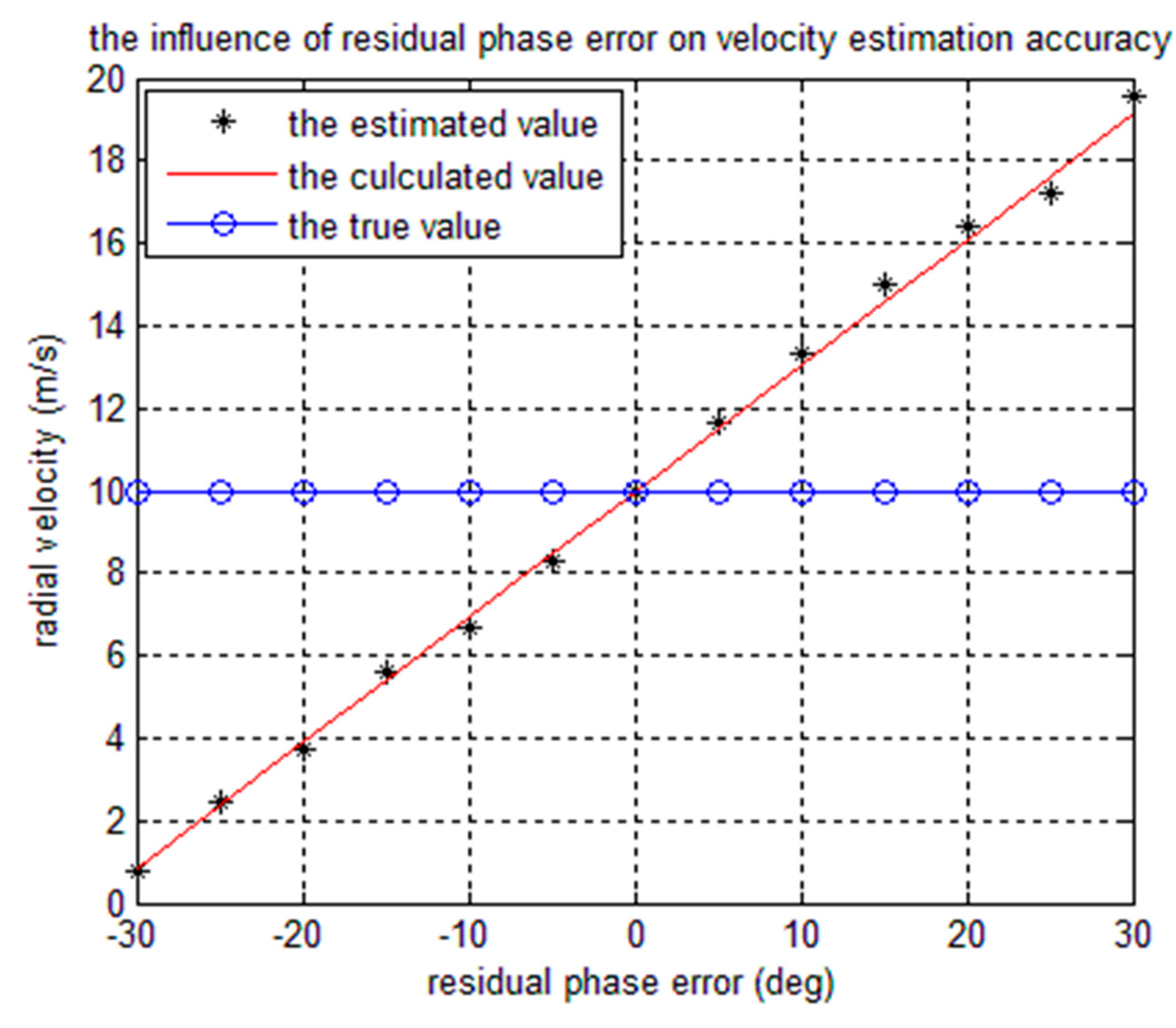
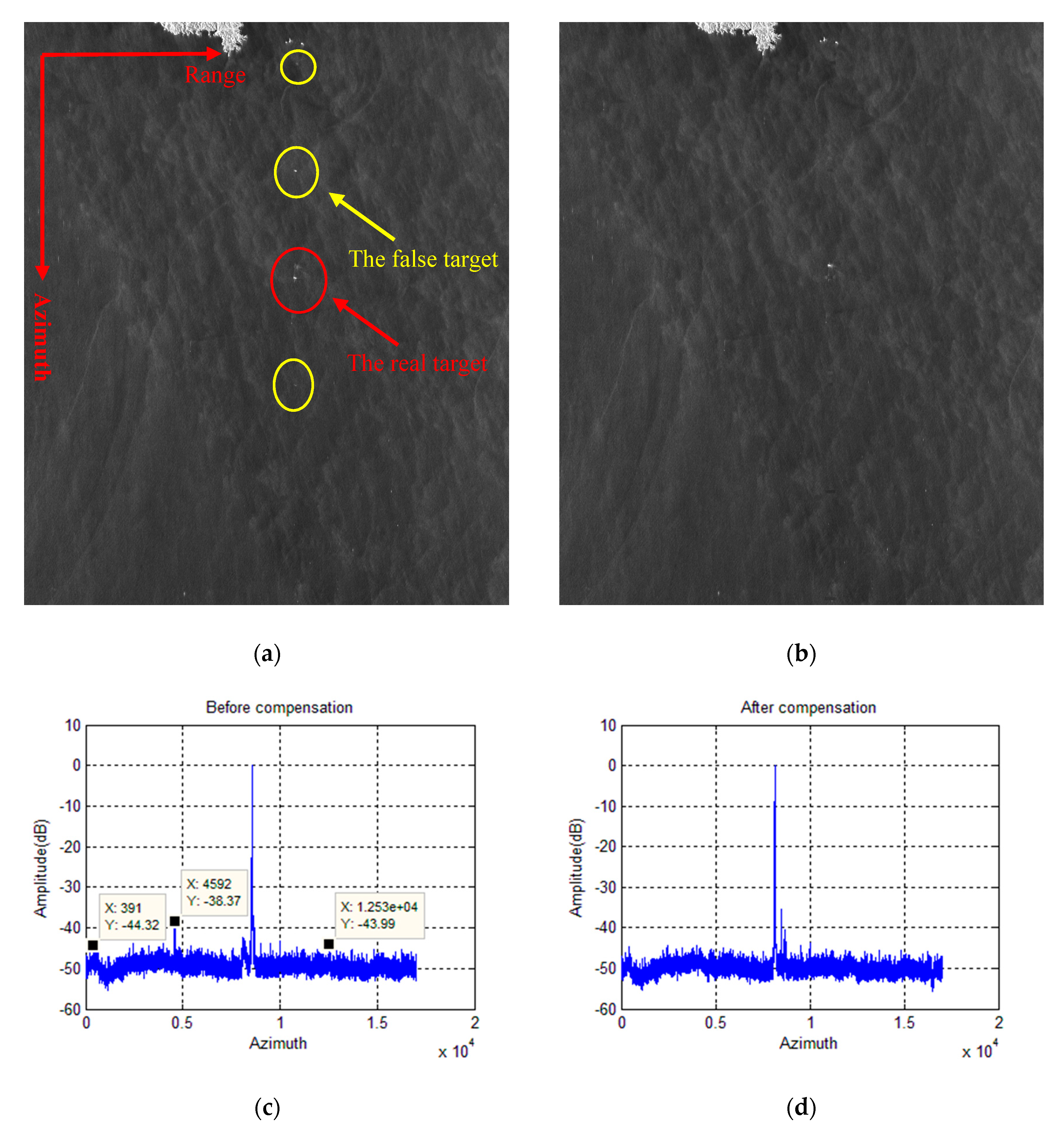
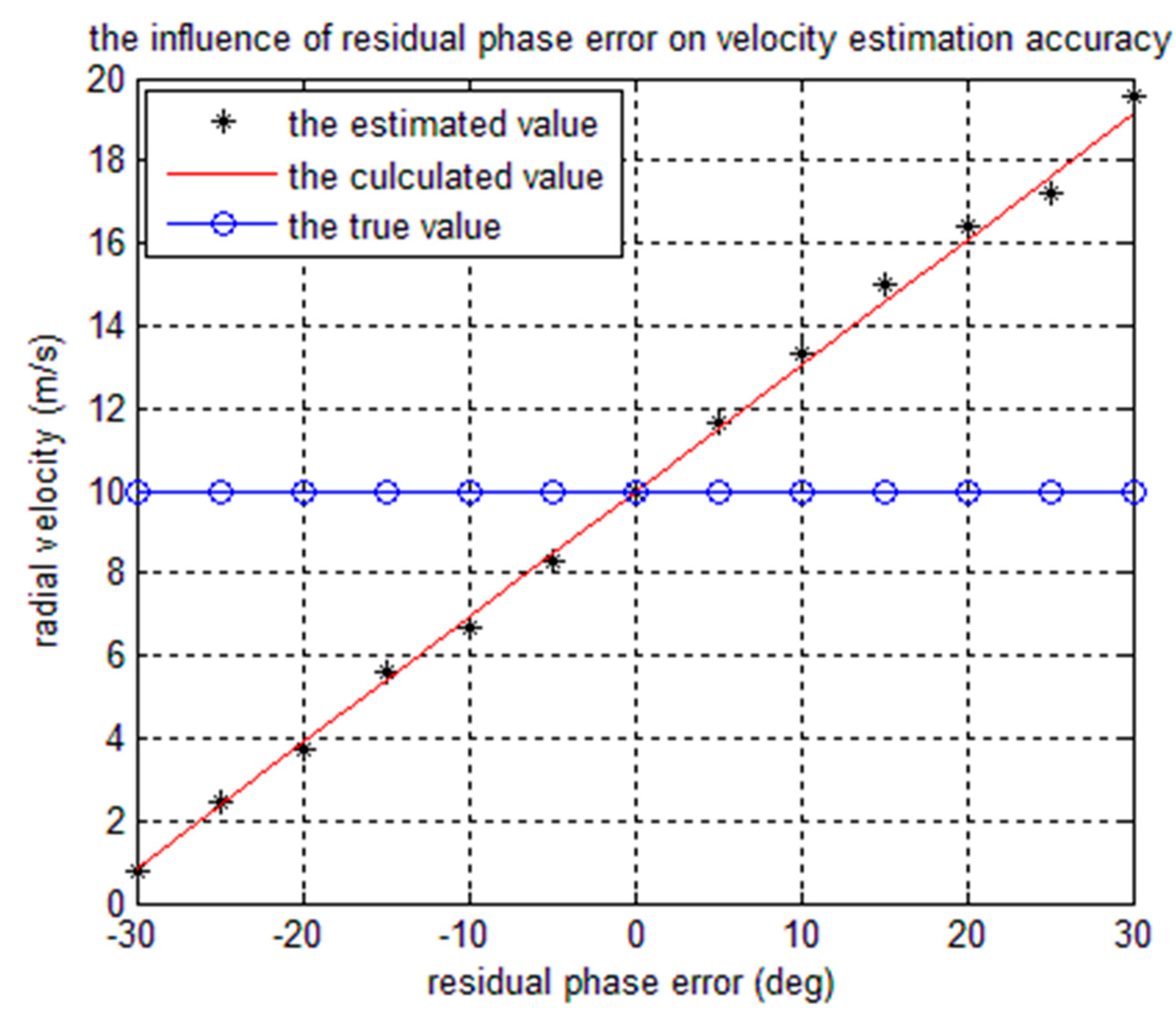
3.3. Compensation for the Phase Introduced by Radial Velocity
4. Experimental Results
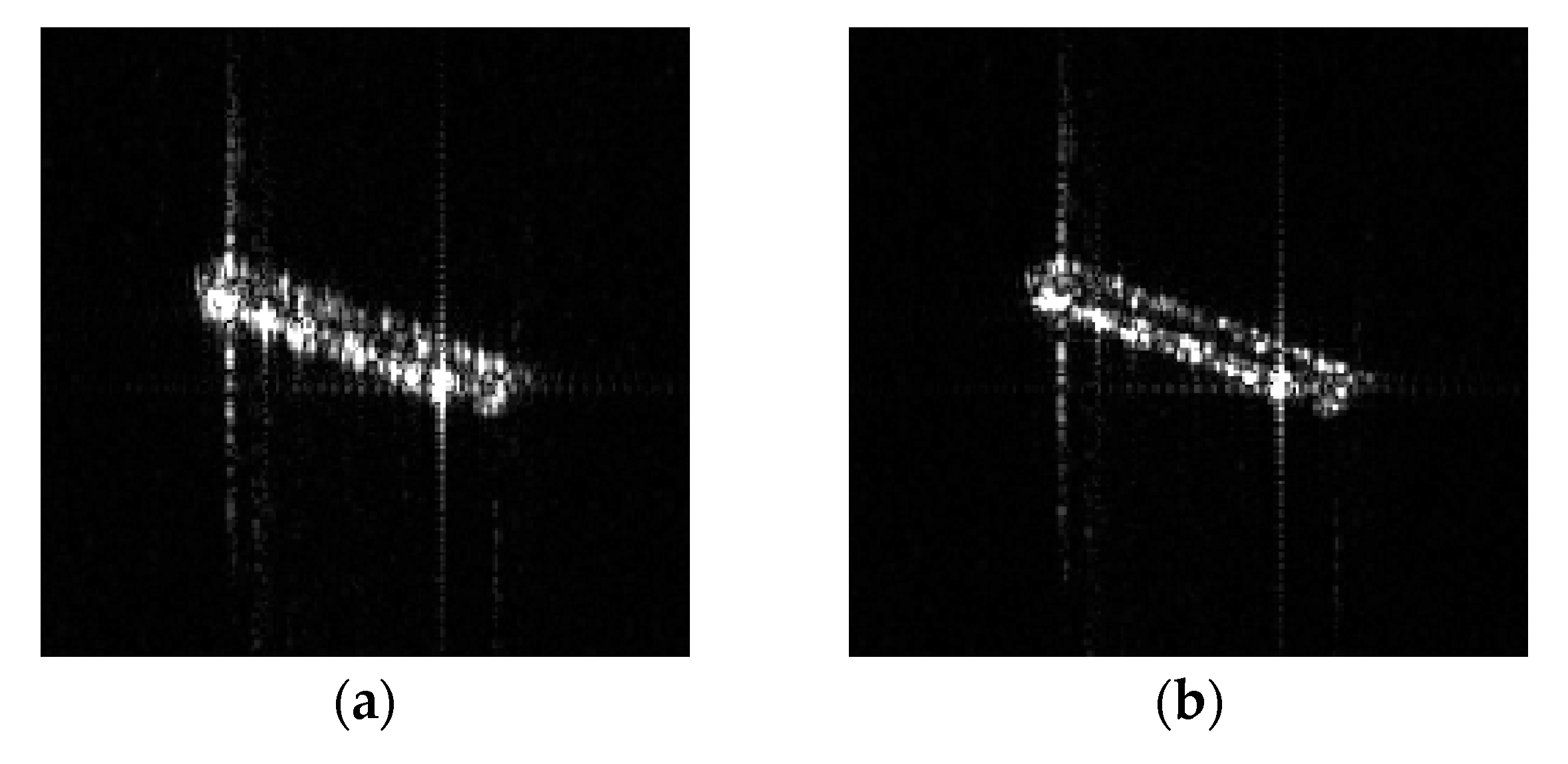
4.1. Performance Comparison of Two Radial Velocity Estimation Methods
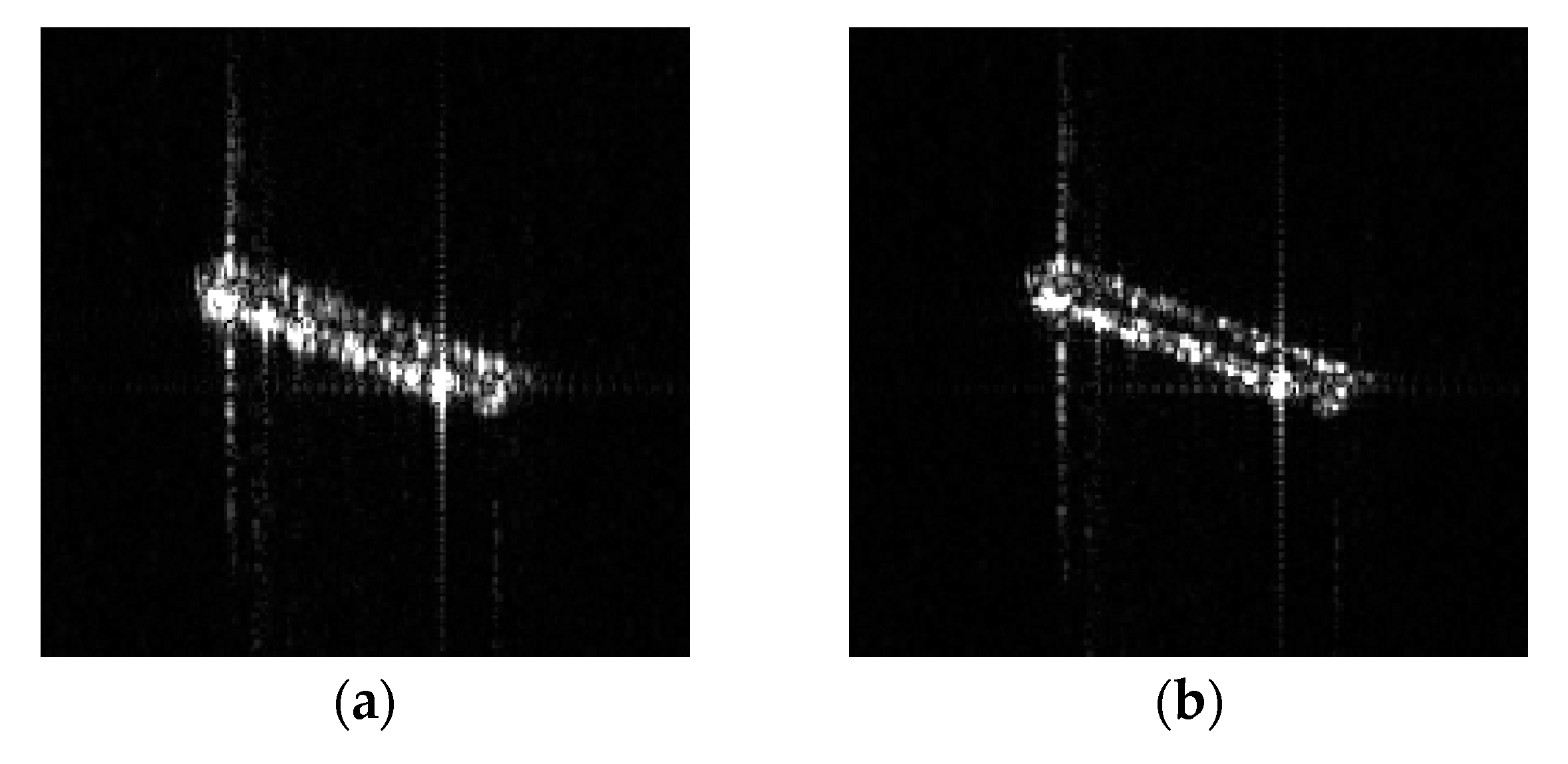
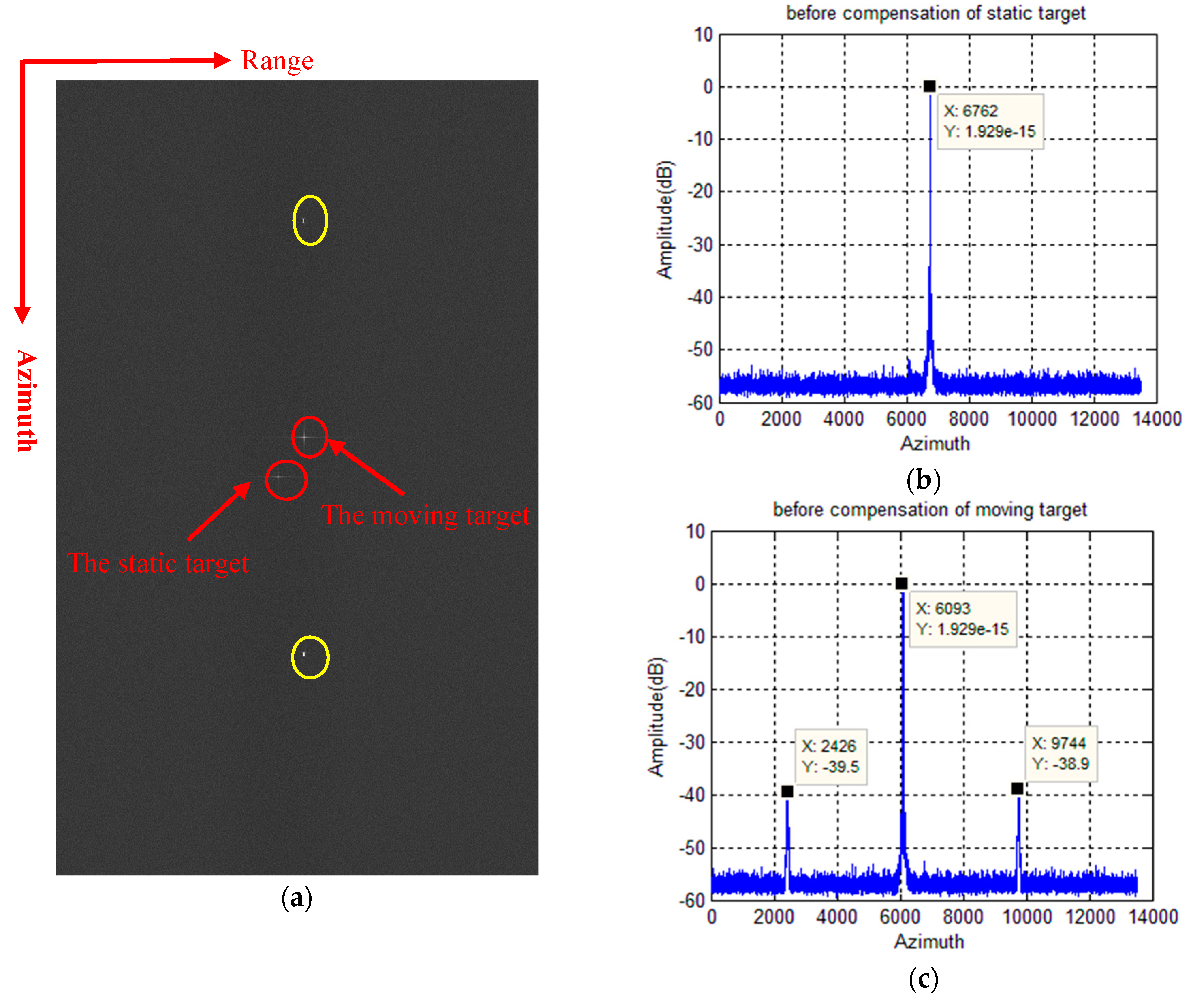
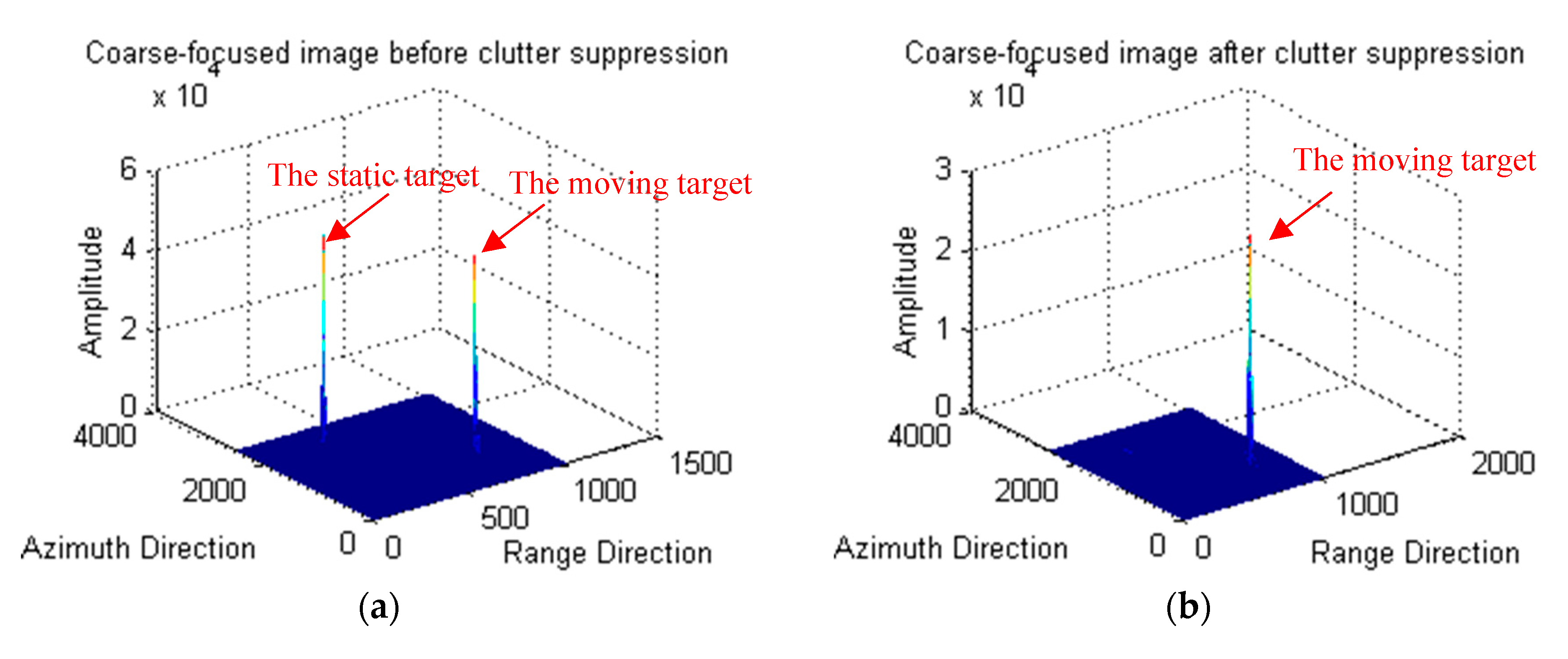
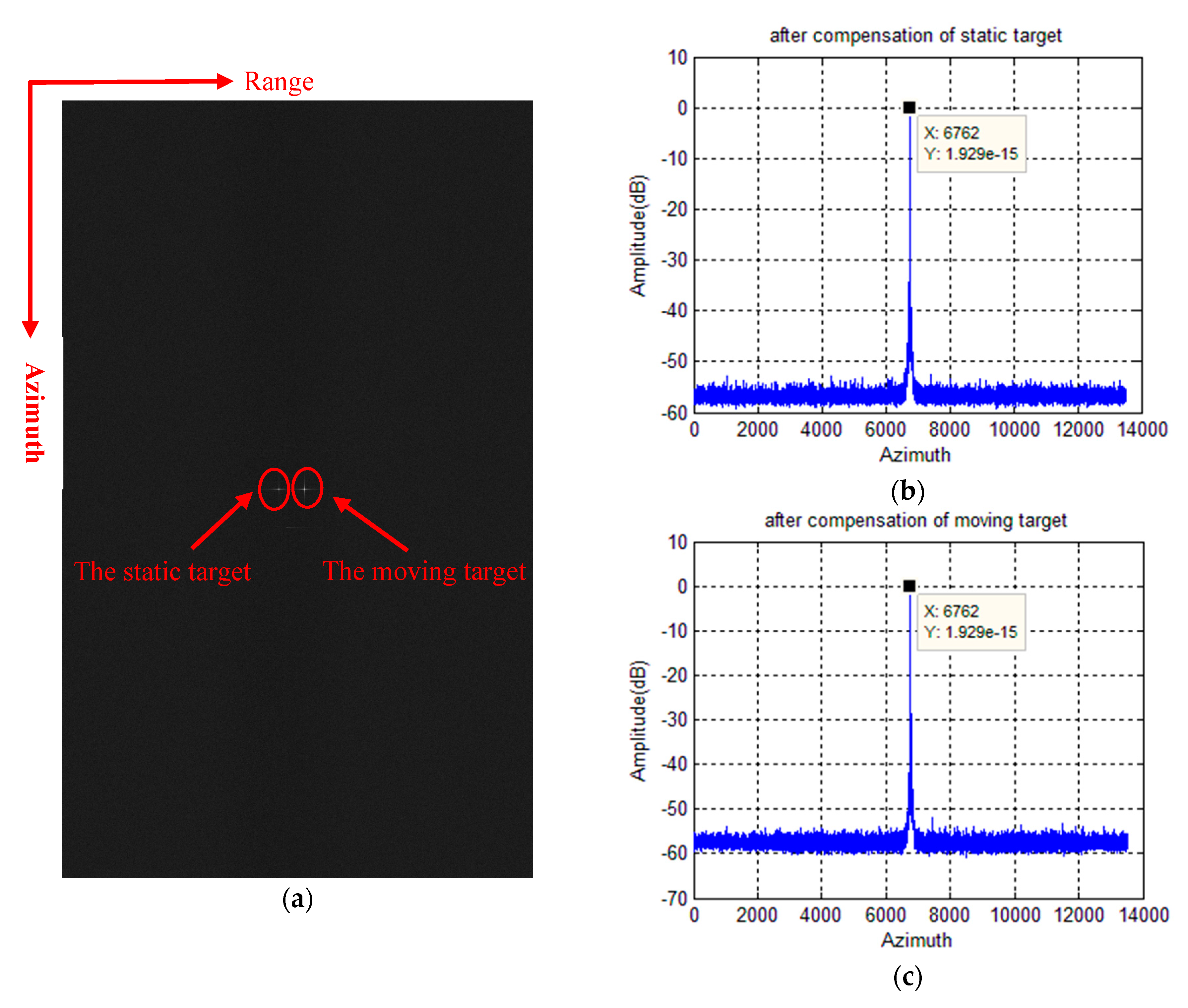
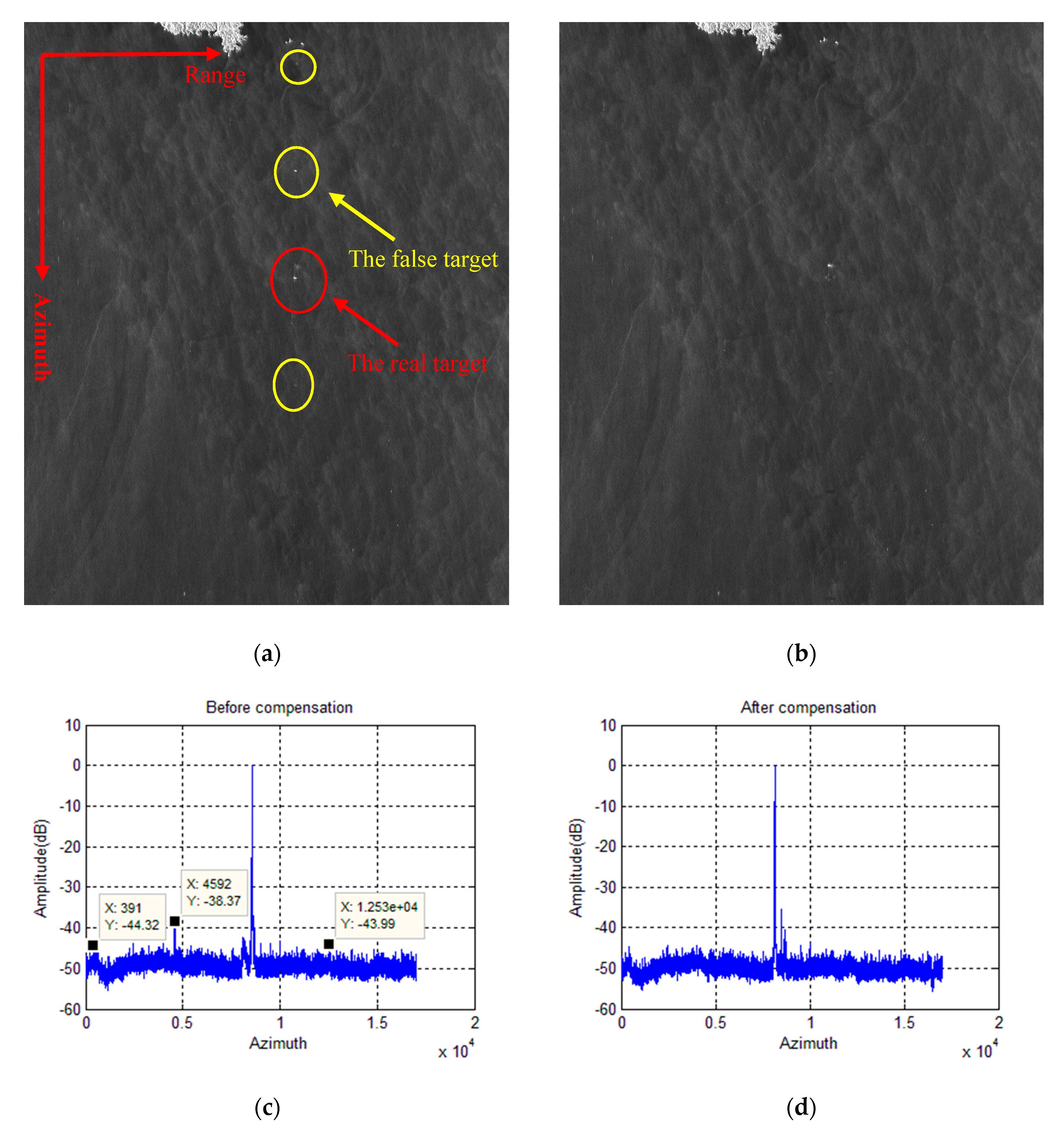
4.2. Simulation Experiment
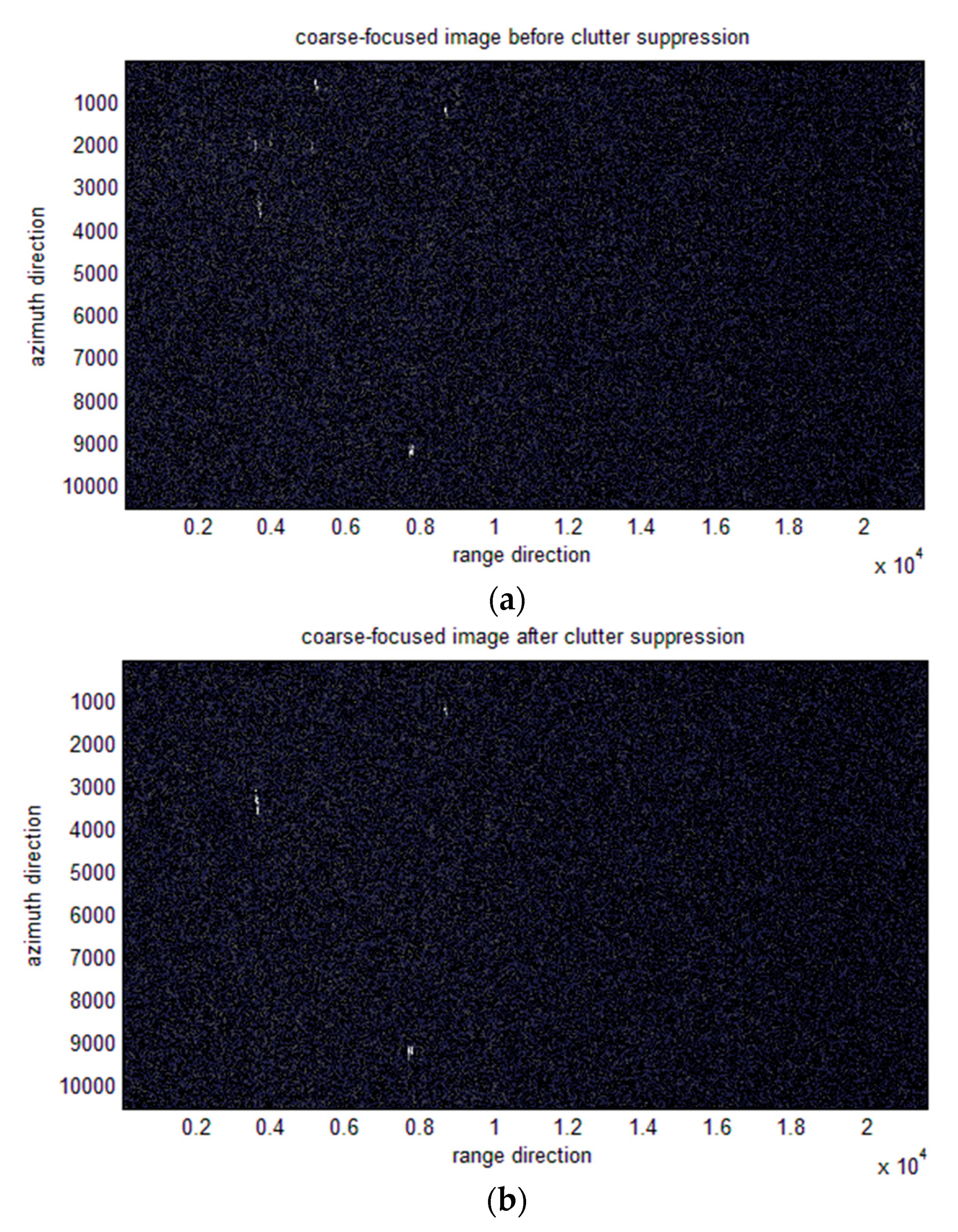
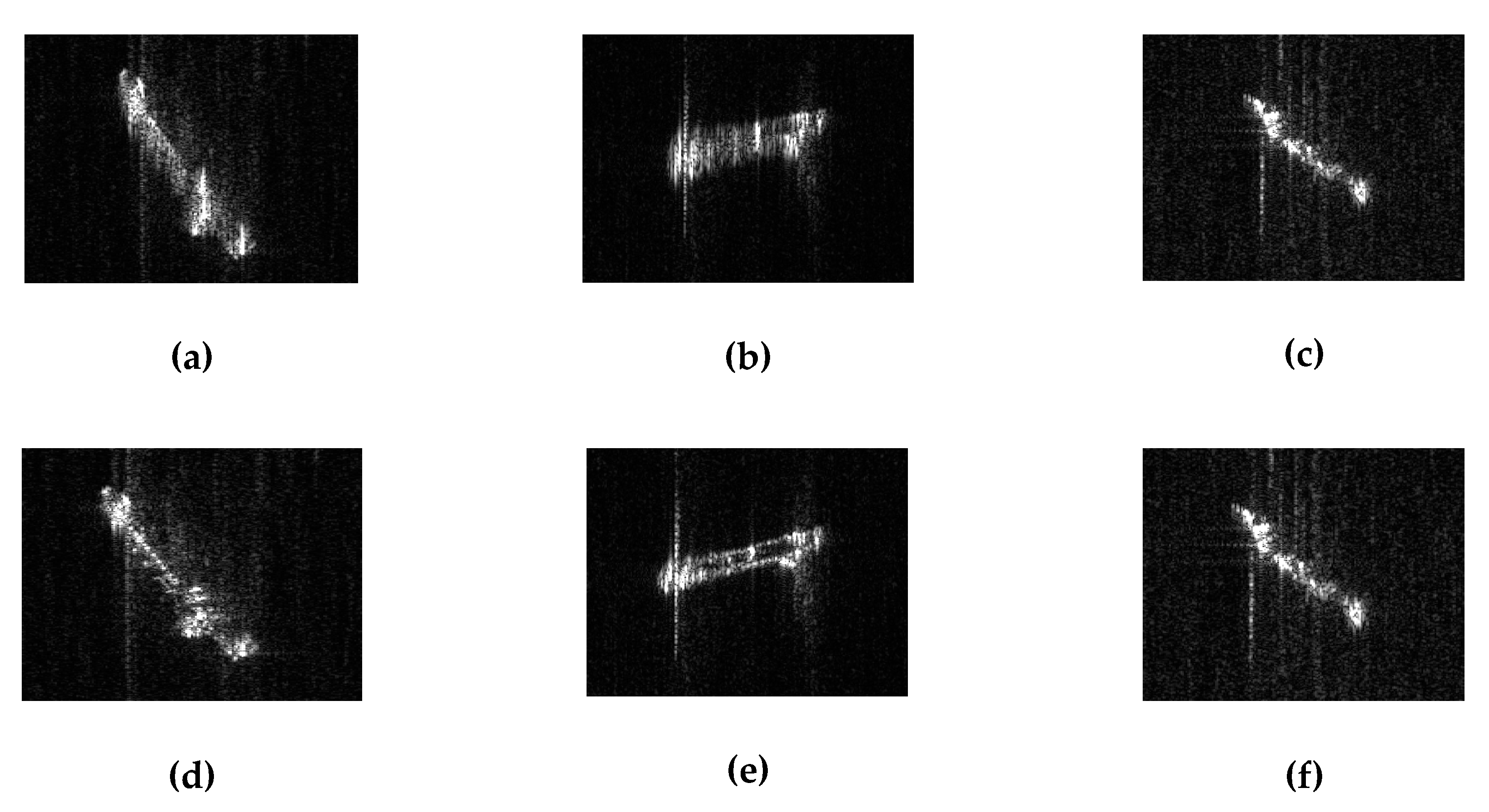
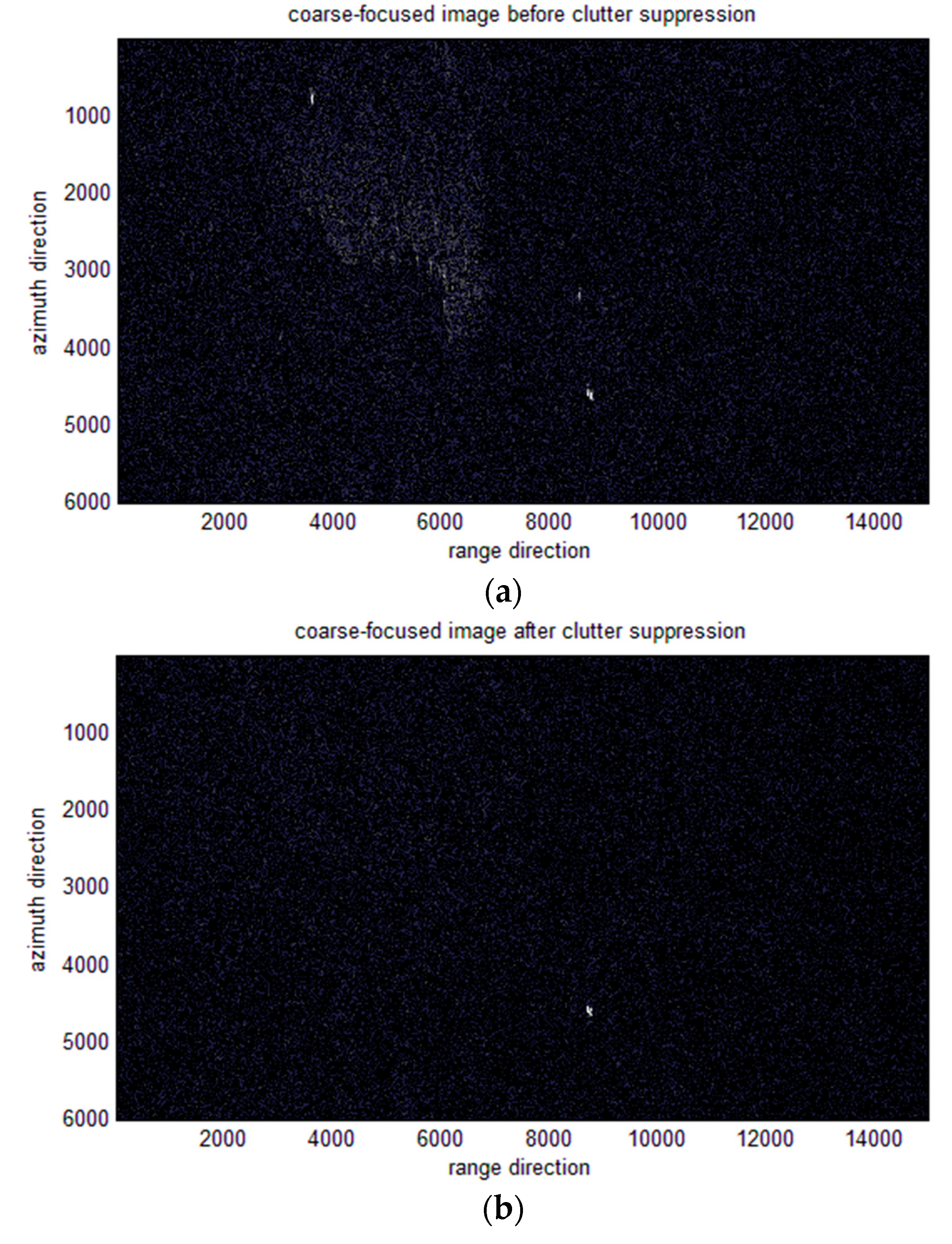
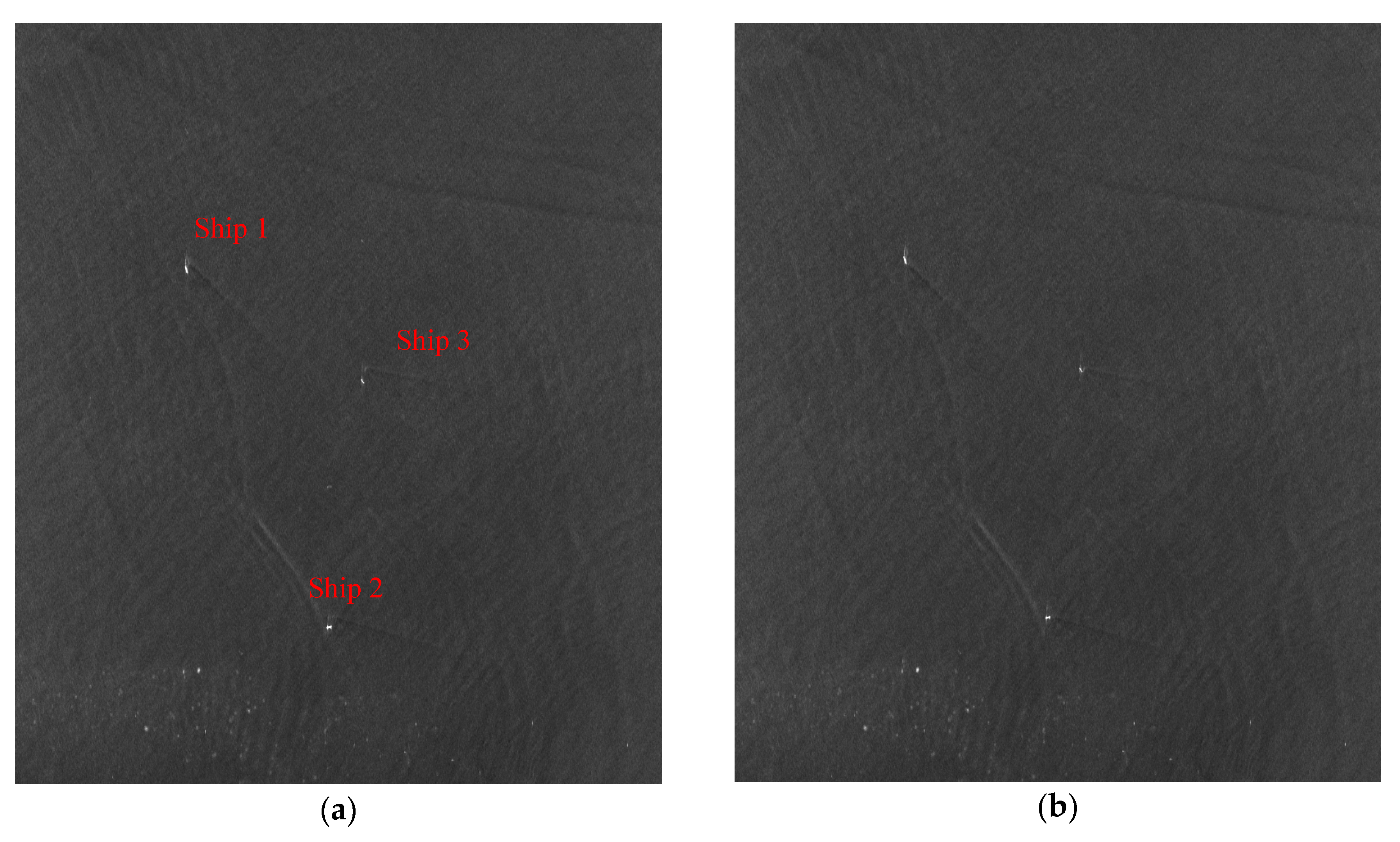
4.3. Real Data of GF-3
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Currie, A.; Brown, M.A. Wide-swath SAR. IEE Proc. F Radar Signal Process. 1992, 139, 122–135. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G.; Moreira, A. Digital beamforming on receive: Techniques and optimization strategies or high-resolution wideswath SAR imaging. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 564–592. [Google Scholar] [CrossRef]
- Han, B.; Ding, C.; Zhong, L.; Liu, J.; Qiu, X.; Hu, Y.; Lei, B. The GF-3 SAR data processor. Sensors 2018, 18, 835. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Yu, W.; Deng, Y. The SAR payload design and performance for the GF-3 mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [PubMed]
- Shang, M.; Qiu, X.; Han, B.; Ding, C.; Hu, Y. Channel imbalances and along-track baseline estimation for the GF-3 azimuth multichannel mode. Remote Sens. 2019, 11, 1297. [Google Scholar] [CrossRef]
- Sun, G.; Xiang, J.; Xing, M.; Yang, J.; Guo, L. A channel phase error correction method based on joint quality function of GF-3 SAR dual-channel images. Sensors 2017, 18, 3131. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Li, Z.; Liu, Y.; Bao, Z. Channel error estimation methods for multichannel SAR systems in azimuth. IEEE Geosci. Remote Sens. Lett. 2013, 10, 548–552. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Moreira, A. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling. IEEE Geosci. Remote Sens. Lett. 2004, 1, 260–264. [Google Scholar] [CrossRef]
- Kim, J.; Younis, M.; Prats, P.; Gabele, M.; Krieger, G. First spaceborne demonstration of digital beamforming for azimuth ambiguity suppression. IEEE Trans. Geosci. Remote Sens. 2013, 51, 579–590. [Google Scholar] [CrossRef]
- Jin, T.; Qiu, X.; Hu, D.; Ding, C. An ML-based radial velocity estimation algorithm for moving targets in spaceborne high-resolution and wide-swath SAR systems. Remote Sens. 2017, 9, 404. [Google Scholar] [CrossRef]
- Jin, T.; Qiu, X.; Hu, D.; Ding, C. Unambiguous imaging of static scenes and moving targets with the first Chinese dual-channel spaceborne SAR sensor. Sensors 2017, 17, 1709. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Xing, M.; Xia, X. Simultaneous stationary scene imaging and ground moving target indication for high-resolution wide-swath SAR system. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4224–4239. [Google Scholar] [CrossRef]
- Tan, W.; Xu, W.; Huang, P.; Huang, Z.; Qi, Y.; Han, K. Investigation of azimuth multichannel reconstruction for moving targets in high resolution wide swath SAR. Sensors 2017, 17, 1270. [Google Scholar] [CrossRef]
- Lightstone, L.; Faubert, D.; Rempel, G. Multiple phase centre DPCA for airborne radar. In Proceedings of the 1991 IEEE National, Los Angeles, CA, USA, 12–13 March 1991. [Google Scholar]
- Gierull, C.H.; Sikaneta, I.H. Raw Data based two-aperture SAR ground moving target indication. In Proceedings of the IEEE 2003 International Geoscience and Remote Sensing Symposium (IGARSS 2003), Toulouse, France, 21–25 July 2003. [Google Scholar]
- Wang, X.; Gao, G.; Zhou, S.; Zou, H. A clutter suppression approach for SAR-GMTI based on dual-channel DPCA. J. Radars. 2014, 3, 241–248. [Google Scholar]
- Gierull, C.H. Statistical analysis of multilook SAR interferograms for CFAR detection of ground moving targets. IEEE Trans. Geosci. Remote Sens. 2004, 42, 691–701. [Google Scholar] [CrossRef]
- Gierull, C.H.; Sikaneta, I.; Cerutti-Maori, D. Two-step detector for RADARSAT-2’s experimental GMTI mode. IEEE Trans. Geosci. Remote Sens. 2013, 51, 436–454. [Google Scholar] [CrossRef]
- Klemm, R. Principles of Space-Time Adaptive Processing; IEE Publishers: London, UK, 2002. [Google Scholar]
- Blunt, S.D.; Gerlach, K.; Rangaswamy, M. STAP using knowledge-aided covariance estimation and the FRACTA algorithm. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1043–1057. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. Simultaneous high-resolution wide-swath SAR imaging and ground moving target indication: Processing approaches and system concepts. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5015–5029. [Google Scholar] [CrossRef]
- Zhang, S.; Xing, M.; Xia, X. Robust clutter suppression and moving target imaging approach for multichannel in azimuth high-resolution and wide-swath synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2015, 53, 687–709. [Google Scholar] [CrossRef]
- Gierull, C.H. Ground moving target parameter estimation for two-channel SAR. IEE Proc. Radar Sonar Navig. 2006, 153, 224–233. [Google Scholar] [CrossRef]
- Frasier, S.J.; Camps, A.J. Dual-beam interferometry for ocean surface current vector mapping. IEEE Trans. Geosci. Remote Sens. 2001, 39, 401–414. [Google Scholar] [CrossRef]
- Yang, T.; Wang, Y.; Li, W. A moving target imaging algorithm for HRWS SAR/GMTI systems. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1147–1157. [Google Scholar] [CrossRef]
- Wang, X.; Wang, R.; Li, N.; Zhou, C. A velocity estimation method of moving target for SAR high-resolution wide-swath mode. In Proceedings of the IEEE 2016 International Geoscience and Remote Sensing Symposium (IGARSS 2016), Beijing, China, 10–15 July 2016. [Google Scholar]
- Carrara, W.; Goodman, R.; Majewski, R. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Yun, Y.; Qi, X.; Li, N. Moving ship SAR imaging based on parameter estimation. J. Radars. 2016, 5, 326–332. [Google Scholar]
- Hu, Q.; Jiang, Y.; Zhang, J.; Sun, X.; Zhang, S. Development of an automatic identification system autonomous positioning system. Sensors 2015, 15, 28574–28591. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SCR(dB) | 20 | 15 | 10 | 5 | 0 |
|---|---|---|---|---|---|
| MEE | 0.461% | 0.704% | 1.698% | 2.434% | 6.172% |
| AEE | 0.033% | 0.110% | 0.246% | 0.750% | 2.454% |
| SCR(dB) | 20 | 15 | 10 | 5 | 0 |
|---|---|---|---|---|---|
| MEE | 0.391% | 0.432% | 0.851% | 1.286% | 5.041% |
| AEE | 0.004% | 0.078% | 0.114% | 0.321% | 2.296% |
| Parameter | Symbol | Value |
|---|---|---|
| Pulse repetition frequency | PRF | 3953.857910 Hz |
| The length of the antenna | Da | 7.5 m |
| Platform Velocity | 7546.671805 m/s | |
| Sample Frequency | 133.33 MHz | |
| Bandwidth | 100 MHz | |
| Pulse width | 55 us | |
| Wavelength | 0.055517 m | |
| Doppler Bandwidth | 2470.53 Hz | |
| Doppler Rate | −1910.36 Hz/s |
| Ship ID | TDC | ML | SCR |
|---|---|---|---|
| Ship 1 | −3.84 m/s | −3.89 m/s | 12.6994 dB |
| Ship 2 | −3.36 m/s | −3.54 m/s | 12.6867 dB |
| Ship 3 | −4.49 m/s | −4.51 m/s | 12.9757 dB |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Qiu, X.; Zhong, L.; Shang, M.; Ding, C. A Simultaneous Imaging Scheme of Stationary Clutter and Moving Targets for Maritime Scenarios with the First Chinese Dual-Channel Spaceborne SAR Sensor. Remote Sens. 2019, 11, 2275. https://doi.org/10.3390/rs11192275
Yang J, Qiu X, Zhong L, Shang M, Ding C. A Simultaneous Imaging Scheme of Stationary Clutter and Moving Targets for Maritime Scenarios with the First Chinese Dual-Channel Spaceborne SAR Sensor. Remote Sensing. 2019; 11(19):2275. https://doi.org/10.3390/rs11192275
Chicago/Turabian StyleYang, Junying, Xiaolan Qiu, Lihua Zhong, Mingyang Shang, and Chibiao Ding. 2019. "A Simultaneous Imaging Scheme of Stationary Clutter and Moving Targets for Maritime Scenarios with the First Chinese Dual-Channel Spaceborne SAR Sensor" Remote Sensing 11, no. 19: 2275. https://doi.org/10.3390/rs11192275
APA StyleYang, J., Qiu, X., Zhong, L., Shang, M., & Ding, C. (2019). A Simultaneous Imaging Scheme of Stationary Clutter and Moving Targets for Maritime Scenarios with the First Chinese Dual-Channel Spaceborne SAR Sensor. Remote Sensing, 11(19), 2275. https://doi.org/10.3390/rs11192275