Intercomparison of Integrated Water Vapor Measurements at High Latitudes from Co-Located and Near-Located Instruments


Abstract
1. Introduction
2. Materials and Methods
2.1. Microwave Radiometers and Radiosondes at the AMF2 Site
2.2. GPS-Derived IWV Data
2.3. Instrumentation at the North Slope of Alaska
3. Results
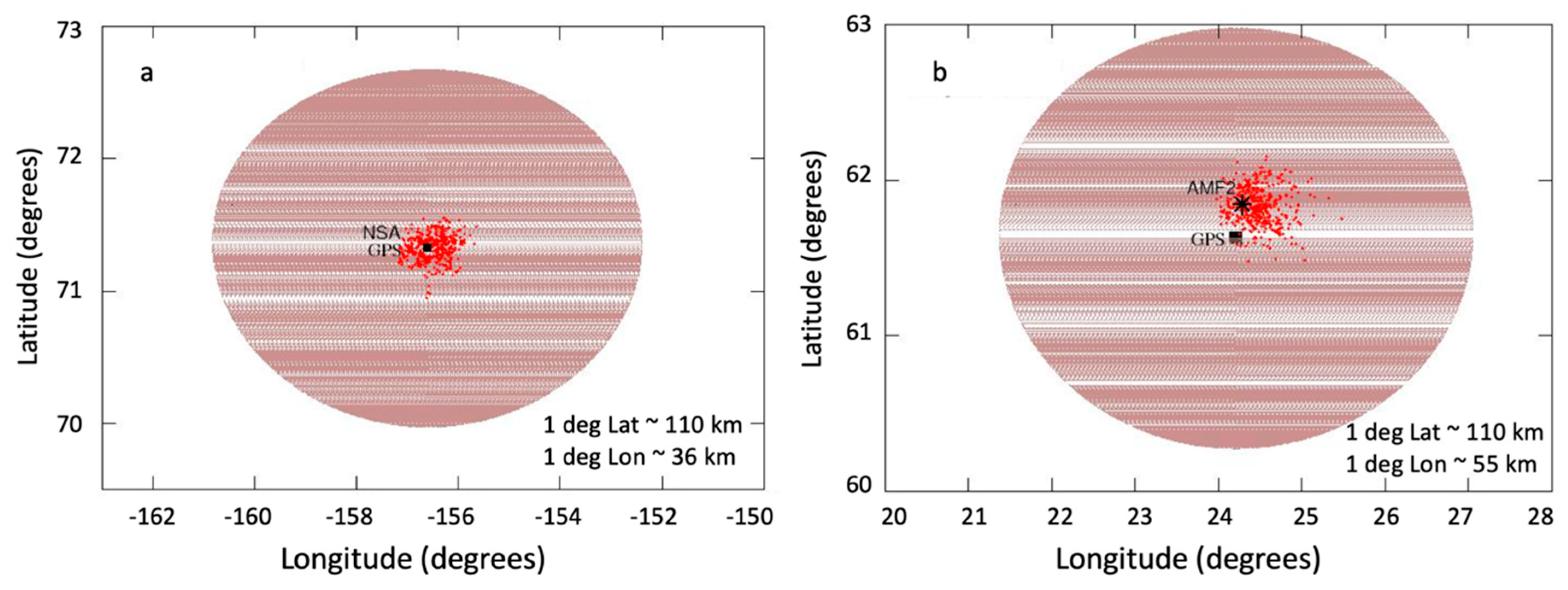
3.1. Instrument Field of View
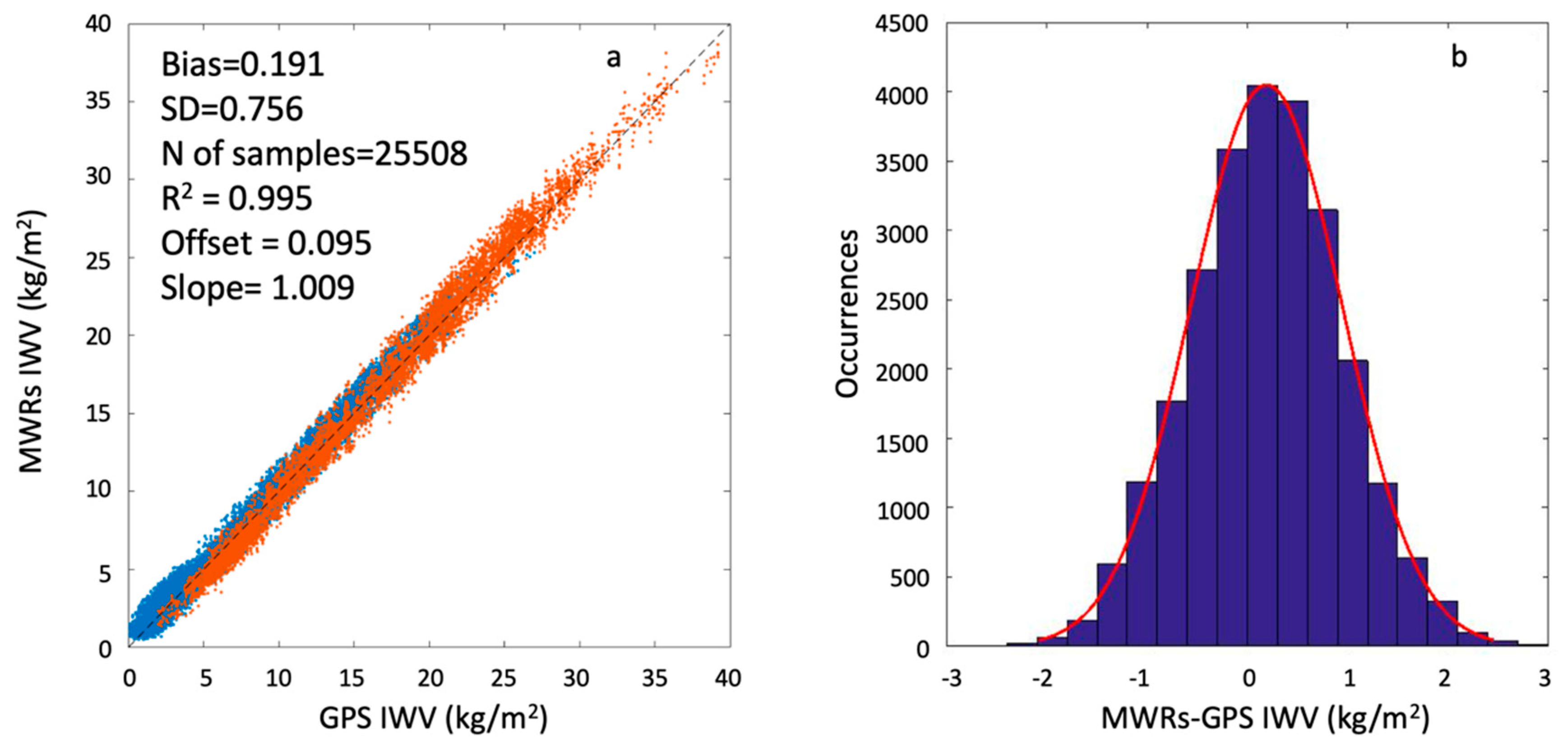
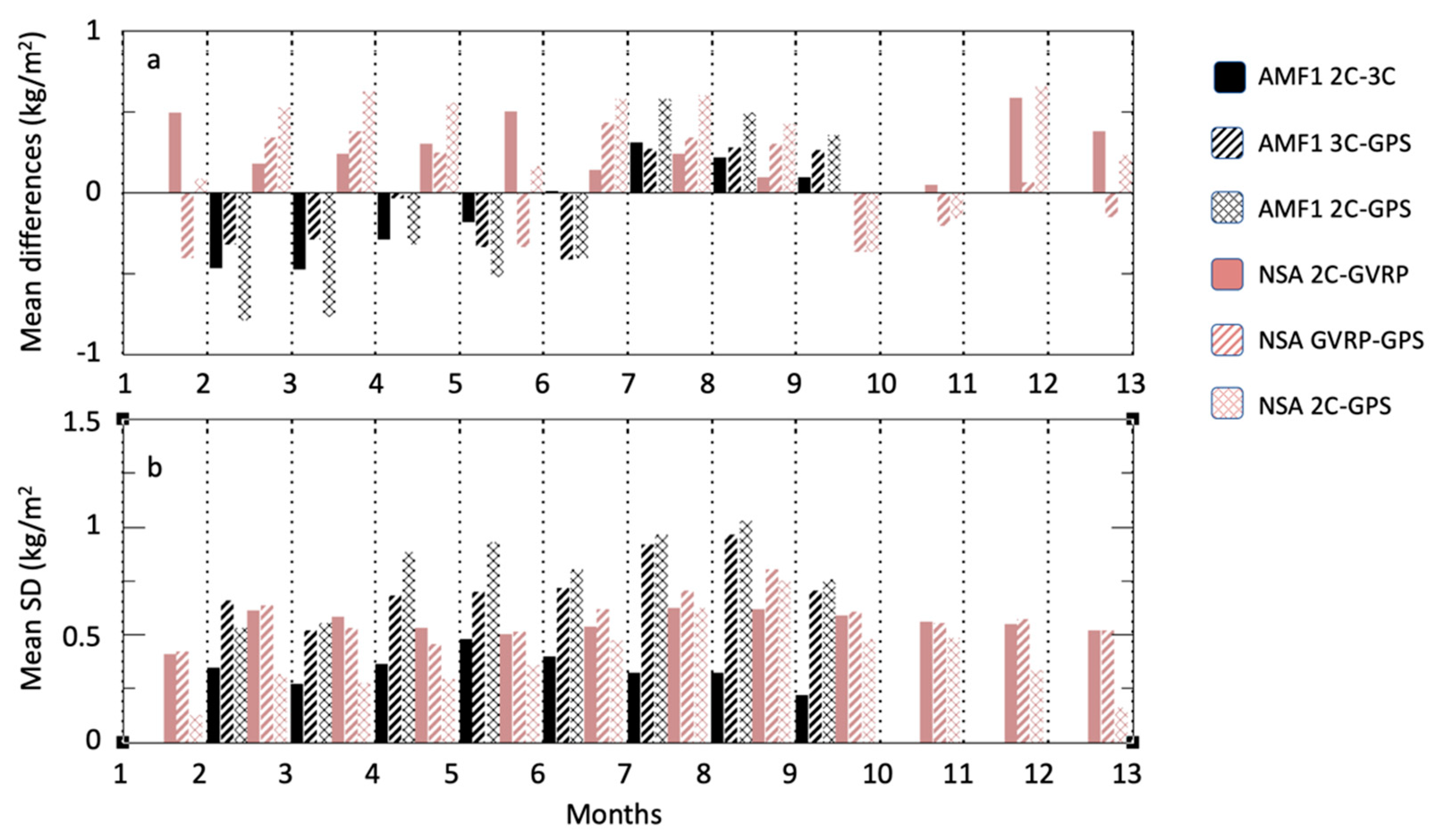
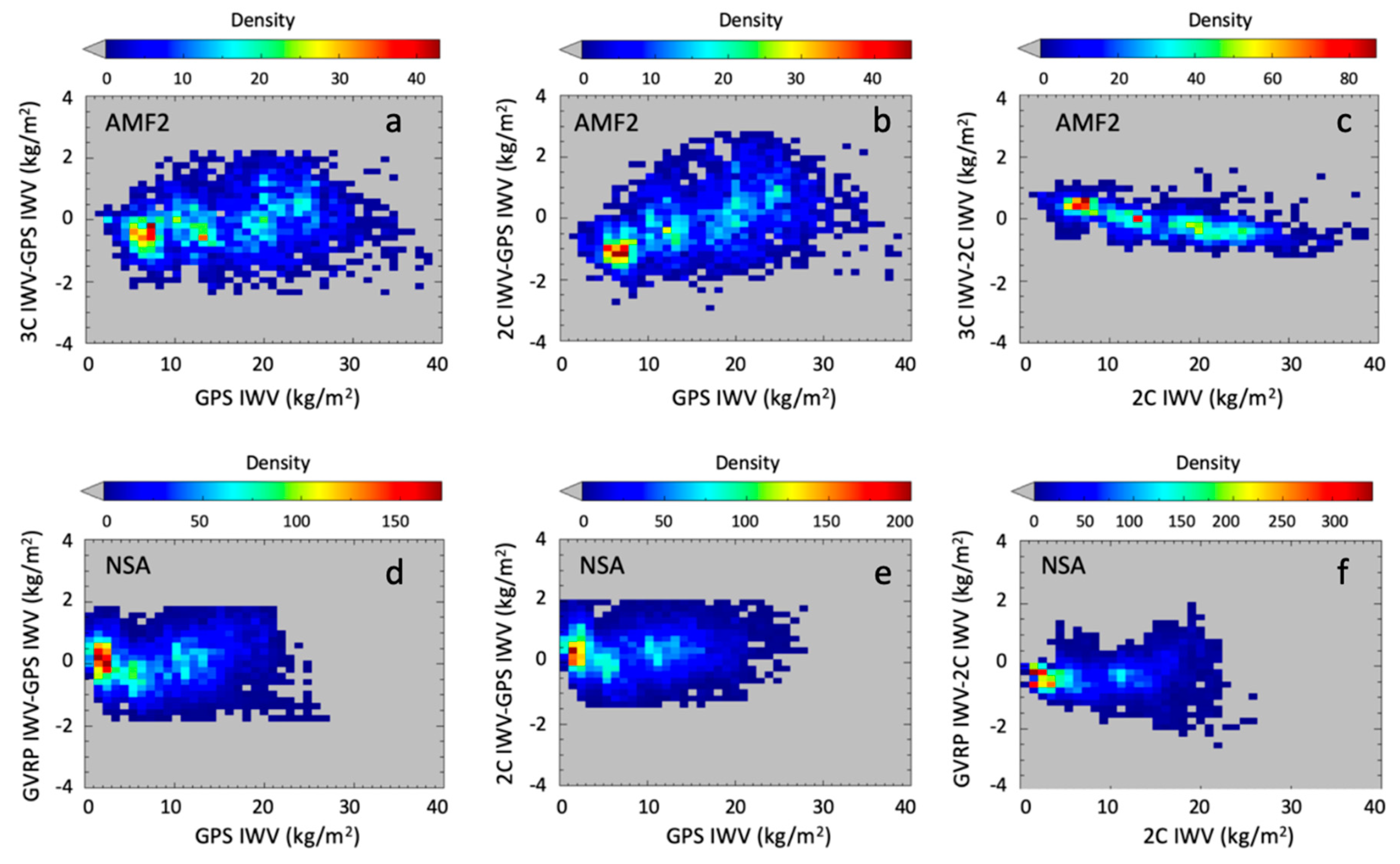
3.2. Analysis of 30-Min GPS Radiometer Data at the Two Sites
3.3. Comparison to Radiosondes
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Allan, P.R. The Role of Water Vapour in Earth’s Energy Flows. Surv. Geophys. 2012, 33, 557–564. [Google Scholar] [CrossRef]
- Basili, P.; Ciotti, P.; Fionda, E. Accuracy of physical, statistical and neural network based algorithms for the retrieval of atmospheric water by ground-based microwave radiometry. In Proceedings of the IGARSS’98, Seattle, WA, USA, 6–10 July 1998; pp. 418–420. [Google Scholar]
- Mattioli, V.; Westwater, E.R.; Gutman, S.I.; Morris, V.R. Forward model studies of water vapor using scanning microwave radiometers, Global Positioning System, and radiosondes during the cloudiness intercomparison experiment. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1012–1021. [Google Scholar] [CrossRef]
- Elgered, G. Tropospheric radio-path delay from ground-based microwave radiometry. In Atmospheric Remote Sensing by Microwave Radiometry; Janssen, M.A., Ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1993; Chapter 4; pp. 215–258. [Google Scholar]
- Teke, K.; Nilsson, T.; Boehm, J.; Hobiger, T.; Steigenberger, P.; Garcia-Espada, S.; Haas, R.; Willis, P. Troposphere delays from space geodetic techniques, water vapour radiometers, and numerical weather models over a series of continuous VLBI campaigns. J. Geod. 2013, 87, 981–1001. [Google Scholar] [CrossRef]
- Van Malderen, R.; Brenot, H.; Pottiaux, E.; Beirle, S.; Hermans, C.; De Mazière, M.; Wagner, T.; De Backer, H.; Bruyninx, C. A multi-site intercomparison of integrated water vapour observations for climate change analysis. Atmos. Meas. Tech. 2014, 7, 2487–2512. [Google Scholar] [CrossRef]
- Choy, S.; Wang, C.-S.; Yeh, T.-K.; Dawson, J.; Jia, M.; Kuleshov, Y. Precipitable water vapor estimates in the Australian region from ground-based GPS observations. Adv. Meteorol. 2015, 2015. [Google Scholar] [CrossRef]
- Memmo, A.; Fionda, E.; Paolucci, T.; Cimini, D.; Ferretti, R.; Bonafoni, S.; Ciotti, P. Comparison of MM5 integrated water vapor with microwave radiometer, GPS, and radiosonde measurements. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1050–1058. [Google Scholar] [CrossRef]
- Luini, L.; Riva, C. Improving the Accuracy in Predicting Water-Vapor Attenuation at Millimeter-Wave for Earth-Space Applications. IEEE Trans. Antennas Propag. 2016, 64, 2487–2493. [Google Scholar] [CrossRef]
- ITU-R P.676-10. In Attenuation by Atmospheric Gases; International Telecommunications Union: Geneva, Switzerland, 2013; p. 24. Available online: https://www.itu.int/rec/R-REC-P.676-10-201309-S/en (accessed on 12 September 2019).
- Witze, A. 5G data networks threaten forecasts Wireless technology could interfere with Earth observations. Nature 2019, 569, 17–18. [Google Scholar] [CrossRef]
- Bedka, S.; Knuteson, R.; Revercomb, H.; Tobin, D.; Turner, D. An assessment of the absolute accuracy of the Atmospheric Infrared Sounder v5 precipitable water vapor product at tropical, midlatitude, and arctic ground-truth sites: September 2002 through August 2008. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar] [CrossRef]
- Alraddawi, D.; Sarkissian, A.; Keckhut, P.; Bock, O.; Noёl, S.; Bekki, S.; Irbah, A.; Meftah, M.; Claud, C. Comparison of total water vapour content in the Arctic derived from GNSS, AIRS, MODIS and SCIAMACHY. Atmos. Meas. Tech. 2018, 11, 2949–2965. [Google Scholar] [CrossRef]
- Thomas, I.D.; King, M.A.; Clarke, P.J.; Penna, N.T. Precipitable water vapor estimates from homogeneously reprocessed GPS data: An intertechnique comparison in Antarctica. J. Geophys. Res. Atmos. 2011, 116, 1–18. [Google Scholar] [CrossRef]
- Pałm, M.; Melsheimer, C.; Noël, S.; Heise, S.; Notholt, J.; Burrows, J.; Schrems, O. Integrated water vapor above Ny Ålesund, Spitsbergen: A multi-sensor intercomparison. Atmos. Chem. Phys. 2010, 10, 1215–1226. [Google Scholar] [CrossRef]
- Berezin, I.A.; Timofeyer, Y.M.; Virolainen, Y.A.; Volkova, K.A. Comparison of ground-based microwave measurements of precipitable water vapour with radio sounding data. Atmos. Ocean. Opt. 2016, 29, 274–281. [Google Scholar] [CrossRef]
- Buehler, S.A.; Östman, S.; Melsheimer, C.; Holl, G.; Eliasson, S.; John, V.O.; Blumenstock, T.; Hase, F.; Elgered, G.; Raffalski, U.; et al. A multi-instrument comparison of integrated water vapour measurements at a high latitude site. Atmos. Chem. Phys. 2012, 12, 10925–10943. [Google Scholar] [CrossRef]
- Ning, T.; Haas, R.; Elgered, G.; Willen, U. Multi-technique comparison of 10 years of wet delay estimates on the west coast of Sweden. J. Geod. 2012, 86, 565–575. [Google Scholar] [CrossRef]
- Miloshevich, L.M.; Vomel, H.; Whitman, D.N.; Leblanc, T. Accuracy assessment and correction of Vaisala RS92radiosonde water vapour measurements. J. Geophys Res. 2009, 114. [Google Scholar] [CrossRef]
- Atmospheric Radiation Measurement Program, Biogenic Aerosols-Effects on Clouds and Climate (BAECC) Campaign. Available online: https://www.arm.gov/research/campaigns/amf2014baecc (accessed on 2 August 2019).
- Cadeddu, M.P.; Liljegren, J.C.; Turner, D.D. The Atmospheric Radiation Measurement (ARM) program network of microwave radiometers: Instrumentation, data, and retrievals. Atmos. Meas. Tech. 2013, 6. [Google Scholar] [CrossRef]
- Racette, P.E.; Westwater, E.R.; Han, Y.; Gasiewski, A.J.; Klein, M.; Cimini, D.; Jones, D.C.; Manning, E.J.; Kim, W.; Wang, J.R.; et al. Measurement of Low Amounts of Precipitable Water Vapor Using Ground-Based Millimeter wave Radiometry. J. Atmos. Ocean. Technol. 2005, 22, 317–337. [Google Scholar] [CrossRef]
- Wu, S.-C. Optimum frequencies of a passive microwave radiometer for tropospheric path-length correction. IEEE Trans. Antennas Propag. 1979, 27, 233–239. [Google Scholar]
- Westwater, E.R.; Guiraud, F.O. Ground-based microwave radiometric retrieval of precipitable water vapor in the presence of clouds with high liquid content. Radio Sci. 1980, 15, 947–957. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing, Active and Passive. In Microwave Remote Sensing Fundamentals and Radiometry; Addison-Wesley Publishing Company: Reading, MA, USA, 1981; Volume 1. [Google Scholar]
- Mattioli, V.; Basili, P.; Bonafoni, S.; Ciotti, P.; Westwater, E.R. Analysis and improvements of cloud models for propagation studies. Radio Sci. 2009, 44, RS2005. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L. Systematic errors in global radiosonde precipitable water data from comparisons with ground-based GPS measurement. J. Clim. 2008, 21, 2218–2238. [Google Scholar] [CrossRef]
- Cady-Pereira, K.; Shephard, M.W.; Turner, D.D.; Mlawer, E.J.; Clough, S.A.; Wagner, T.J. Improved daytime column-integrated precipitable water vapor from Vaisala Radiosonde Humidity Sensors. J. Atmos. Appl. Technol. 2008, 25, 873–883. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Dai, A.; Immler, F.; Sommer, M.; Vomel, H. Radiation dry bias correction of Vaisala RS92 humidity data and its impacts on historical radiosonde data. J. Atmos. Ocean. Technol. 2013, 30, 197–214. [Google Scholar] [CrossRef]
- Peppler, R.A.; Long, C.N.; Sisterson, D.L.; Turner, D.D.; Bahrmann, C.P.; Christensen, S.W.; Doty, K.J.; Eagan, R.C.; Halter, T.D.; Ivey, M.D.; et al. An overview of ARM Program Climate Research Facility data quality assurance. Open Atmos. Sci. J. 2008, 2, 192–216. [Google Scholar] [CrossRef]
- Peppler, R.A.; Kehoe, K.E.; Monroe, J.W.; Theisen, A.K.; Moore, S.T. The ARM Data Quality Program. Meteorol. Monogr. 2016, 57, 12.1–12.14. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. In The Use of Artificial Satellites for Geodesy, 1st ed.; Henriksen, S.W., Mancini, A., Chovitz, B.H., Eds.; Geophysical Monograph Series; American Geophysical Union: Washington, DC, USA, 1972. [Google Scholar]
- Davis, J.L.; Herrin, T.A.; Shapiro, I.I.; Rogers, A.E.E.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modelling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Ning, T.; Wang, J.; Elgered, G.; Dick, G.; Wickert, J.; Bradke, M.; Sommer, M.; Querel, R.; Smale, D. The uncertainty of the atmospheric integrated water vapour estimated from GNSS observations. Atmos. Meas. Tech. 2016, 9, 79–92. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Basili, P.; Bonafoni, S.; Ferrara, R.; Ciotti, P.; Fionda, E.; Ambrosini, R. Atmospheric water vapor retrieval by means of both a GPS network and a microwave radiometer during an experimental campaign in Cagliari, Italy, in 1999. IEEE Trans. Geosci. Remote Sens. 2001, 38, 2436–2443. [Google Scholar] [CrossRef]
- Pierdicca, N.; Guerriero, L.; Giusto, R.; Broioni, M.; Egido, A. SAVERS: A Simulator of GNSS reflections from bare and vegetated soils. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6542–6554. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Webb, F.H.; Zumberge, J.F. An Introduction to GIPSY/OASIS II, Jet Propulsion Laboratory Document JPL D-11088; California Institute of Technology: Pasadena, CA, USA, 1997; Available on request. [Google Scholar]
- Pacione, R.; Pace, B.; Bianco, G. Homogeneously reprocessed ZTD long-term time series over Europe. In Proceedings of the EGU GA 2014, Vienna, Austria, 27 April–2 May 2014; Available online: http://meetingorganizer.copernicus.org/EGU2014/EGU2014-2945.pdf (accessed on 12 september 2019).
- Pacione, R.; Araszkiewicz, A.; Brockmann, E.; Douša, J. EPN-Repro2: A reference GNSS tropospheric data set over Europe. Atmos. Meas. Tech. 2017, 10, 1689–1705. [Google Scholar] [CrossRef]
- Boehm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. J. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef]
- Verlinde, J.; Zak, B.D.; Shupe, M.D.; Ivey, M.D.; Stamnes, K. The ARM North Slope of Alaska (NSA) Sites. Meteorol. Monogr. 2016, 57, 8.1–8.13. [Google Scholar] [CrossRef]
- Cadeddu, M.P.; Turner, D.D.; Liljegren, J.C. A Neural Network for Real-Time Retrievals of PWV and LWP from Arctic Millimeter-Wave Ground-Based Observations. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1887–1900. [Google Scholar] [CrossRef]
- Ware, R.H.; Fulker, D.W.; Stein, S.A.; Anderson, D.N.; Avery, S.K.; Clark, R.D.; Droegemeier, K.; Kuettner, J.P.; Minster, J.B. Suominet: A real-time national GPS network for atmospheric research and education. Bull. Am. 2000, 81, 677–694. [Google Scholar] [CrossRef]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software Version 5.2. University of Bern: Bern, Switzerland, 2015. Available online: http://www.bernese.unibe.ch/docs/DOCU52.pdf (accessed on 12 September 2019).
- King, R.; Herring, T.; Mccluscy, S. Documentation for the GAMIT GPS Analysis Software 10.4; Tech. Rep.; Massachusetts Institute of Technology: Cambridge, MA, USA, 2010. [Google Scholar]
- Cole, A.E.; Court, A.; Kantor, A.J. Model Atmospheres. In Handbook of Geophysics and Space Environments; Valley, S.L., Ed.; Office of Aerospace Research, USAF: Hanscom AFB, MA, USA, 1965; Chapter 2. [Google Scholar]
- Haase, J.; Ge Vedel, M.; Calais, E. Accuracy and variability of GPS tropospheric delay measurements of water vapor in the western Mediterranean. J. Appl. Meteorol. 2003, 42, 1547–1568. [Google Scholar] [CrossRef]
- Dzambo, A.M.; Turner, D.D.; Mlawer, E.J. Evaluation of two Vaisala RS92 radiosonde solar radiative dry bias correction algorithms. Atmos. Meas. Tech. 2016, 9, 1613–1626. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Month | π | ||
|---|---|---|---|
| 1 | 0.148 | 1.74 | 5.94 |
| 2 | 0.148 | 1.83 | 5.24 |
| 3 | 0.149 | 1.80 | 5.88 |
| 4 | 0.151 | 1.44 | 8.03 |
| 5 | 0.154 | 1.68 | 12.45 |
| 6 | 0.156 | 1.44 | 15.74 |
| 7 | 0.158 | 1.15 | 23.20 |
| 8 | 0.157 | 1.26 | 20.42 |
| 9 | 0.155 | 1.26 | 15.35 |
| 10 | 0.153 | 1.54 | 11.21 |
| 11 | 0.151 | 1.62 | 8.75 |
| 12 | 0.149 | 1.67 | 7.29 |
| All year | 0.152 | 2.77 | 12.28 |
| Parameter | GPS | 3C | 2C | GVRP | RSAMF2 | RSNSA |
|---|---|---|---|---|---|---|
| FOV (°, HPBW) | 174 | 3.50 | 6.50 | 1.8 | - | - |
| Area radius 1 (km) | 153 | 0.25 | 0.45 | 0.837 | 17.4 1 | 13.8 2 |
| Nominal instrument uncertainty (kg/m2) | 0.6 | 0.4 | 0.5 | 0.4 | 0.2 | 0.2 |
| Reference | [34] | [21] | [21] | [21] | (See text) | (See text) |
| AMF2 (N = 3604) | NSA (N = 9195) | |||||
|---|---|---|---|---|---|---|
| 3C versus GPS | 2C versus GPS | 3C versus 2C | GVRP versus GPS | 2C versus GPS | GVRP versus 2C | |
| Bias | −0.016 | 0.029 | 0.013 | 0.140 | 0.408 | −0.268 |
| SD | 0.837 | 1.013 | 0.441 | 0.677 | 0.610 | 0.492 |
| Slope | 1.028 | 1.069 | 0.961 | 1.014 | 1.003 | 1.009 |
| Offset | −0.471 | −1.148 | 0.649 | 0.026 | 0.385 | −0.341 |
| R2 | 0.995 | 0.994 | 0.999 | 0.993 | 0.994 | 0.996 |
| AMF2 (N = 397) | NSA (N = 414) | |||||
|---|---|---|---|---|---|---|
| 3C versus RS | GPS versus RS | 2C versus RS | GVRP versus RS | GPS versus RS | 2C versus RS | |
| Bias | 0.127 | 0.167 | −0.134 | −0.050 | −0.178 | 0.210 |
| SD | 0.441 | 0.616 | 0.565 | 0.518 | 0.603 | 0.357 |
| Slope | 0.991 | 0.972 | 1.045 | 1.027 | 0.999 | 1.012 |
| Offset | −0.471 | 1.244 | 0.649 | 0.026 | −0.288 | −0.341 |
| R2 | 0.995 | 0.994 | 0.999 | 0.993 | 0.994 | 0.996 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fionda, E.; Cadeddu, M.; Mattioli, V.; Pacione, R. Intercomparison of Integrated Water Vapor Measurements at High Latitudes from Co-Located and Near-Located Instruments. Remote Sens. 2019, 11, 2130. https://doi.org/10.3390/rs11182130
Fionda E, Cadeddu M, Mattioli V, Pacione R. Intercomparison of Integrated Water Vapor Measurements at High Latitudes from Co-Located and Near-Located Instruments. Remote Sensing. 2019; 11(18):2130. https://doi.org/10.3390/rs11182130
Chicago/Turabian StyleFionda, Ermanno, Maria Cadeddu, Vinia Mattioli, and Rosa Pacione. 2019. "Intercomparison of Integrated Water Vapor Measurements at High Latitudes from Co-Located and Near-Located Instruments" Remote Sensing 11, no. 18: 2130. https://doi.org/10.3390/rs11182130
APA StyleFionda, E., Cadeddu, M., Mattioli, V., & Pacione, R. (2019). Intercomparison of Integrated Water Vapor Measurements at High Latitudes from Co-Located and Near-Located Instruments. Remote Sensing, 11(18), 2130. https://doi.org/10.3390/rs11182130