UAV Imaging of a Martian Brine Analogue Environment in a Fluvio-Aeolian Setting

 ,
,  , ,
, ,  and
and
Abstract

1. Introduction
- To perform UAV-based high-resolution repeat survey and 3D data generation for the mixing zone of a continental salt flat environment;
- To generate geomorphometric parameters for the mixing zone of a continental salt flat environment;
- To observe short-term geomorphometric changes in the brines and their surroundings;
- To quantify the rate of regolith volume transport within such natural brines and to discuss their possible analogies with the proposed Martian brines.
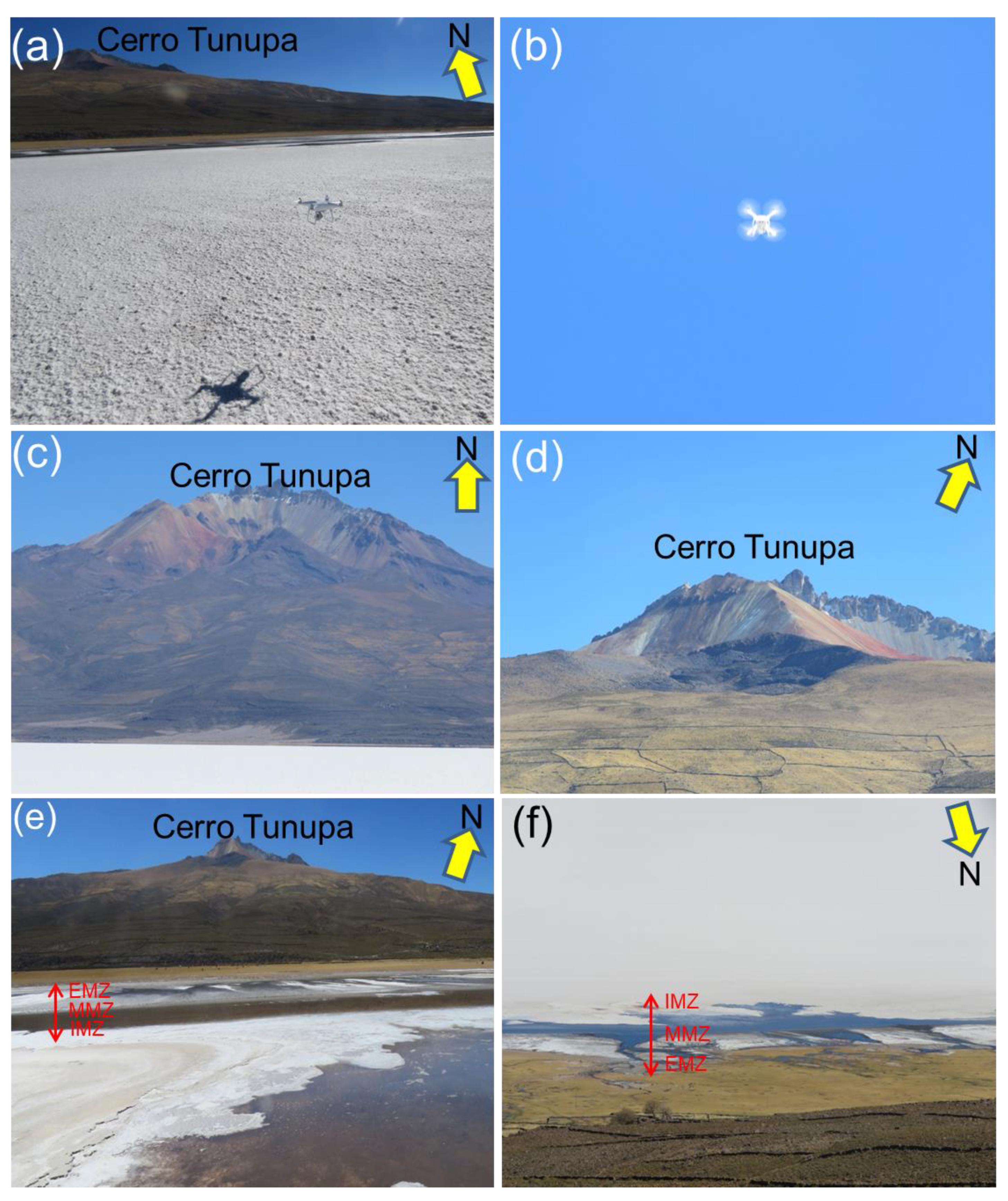
2. Study Area and Brine Seasonality
3. Materials and Methods
3.1. Ground Control Points (GCPs)
3.2. UAV and Flight Planning
3.3. Generation of DEMs and Orthomosaics
3.4. Geomorphometry
4. Results and Discussions
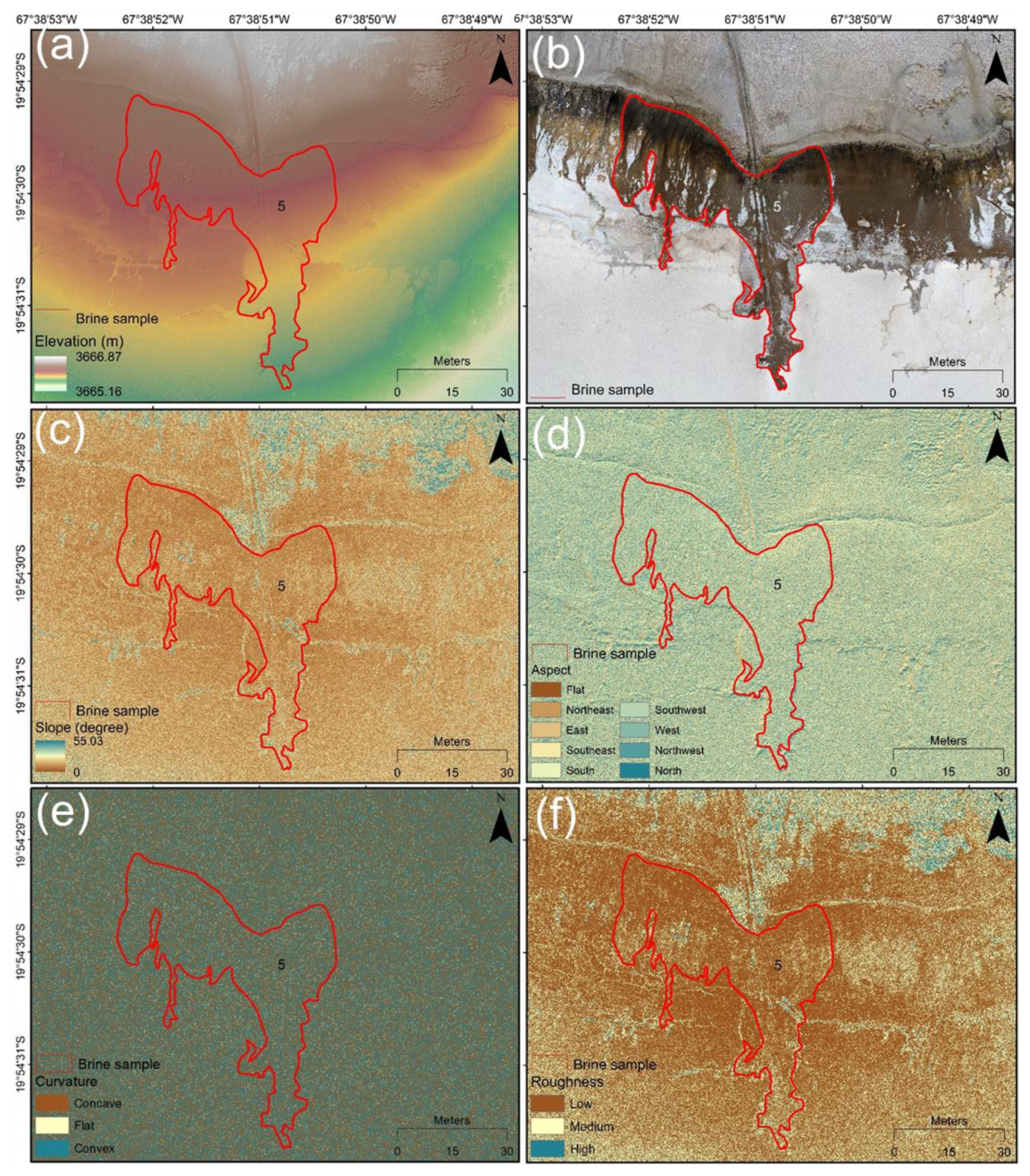
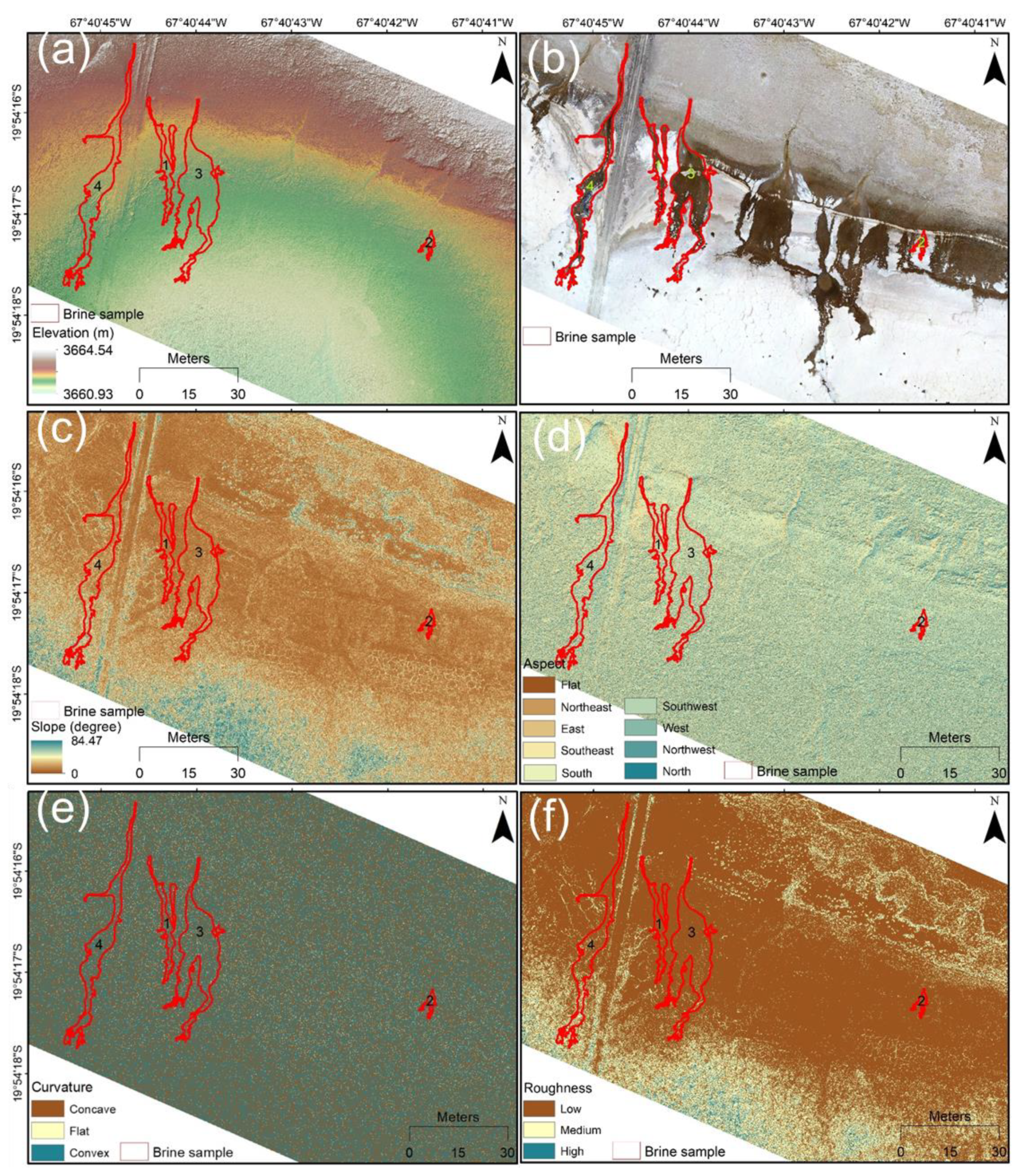
4.1. DEMs, Orthomosaics, and Geomorphometric Parameters
4.2. Short-Term Geomorphometric Changes in the Brines and their Surroundings
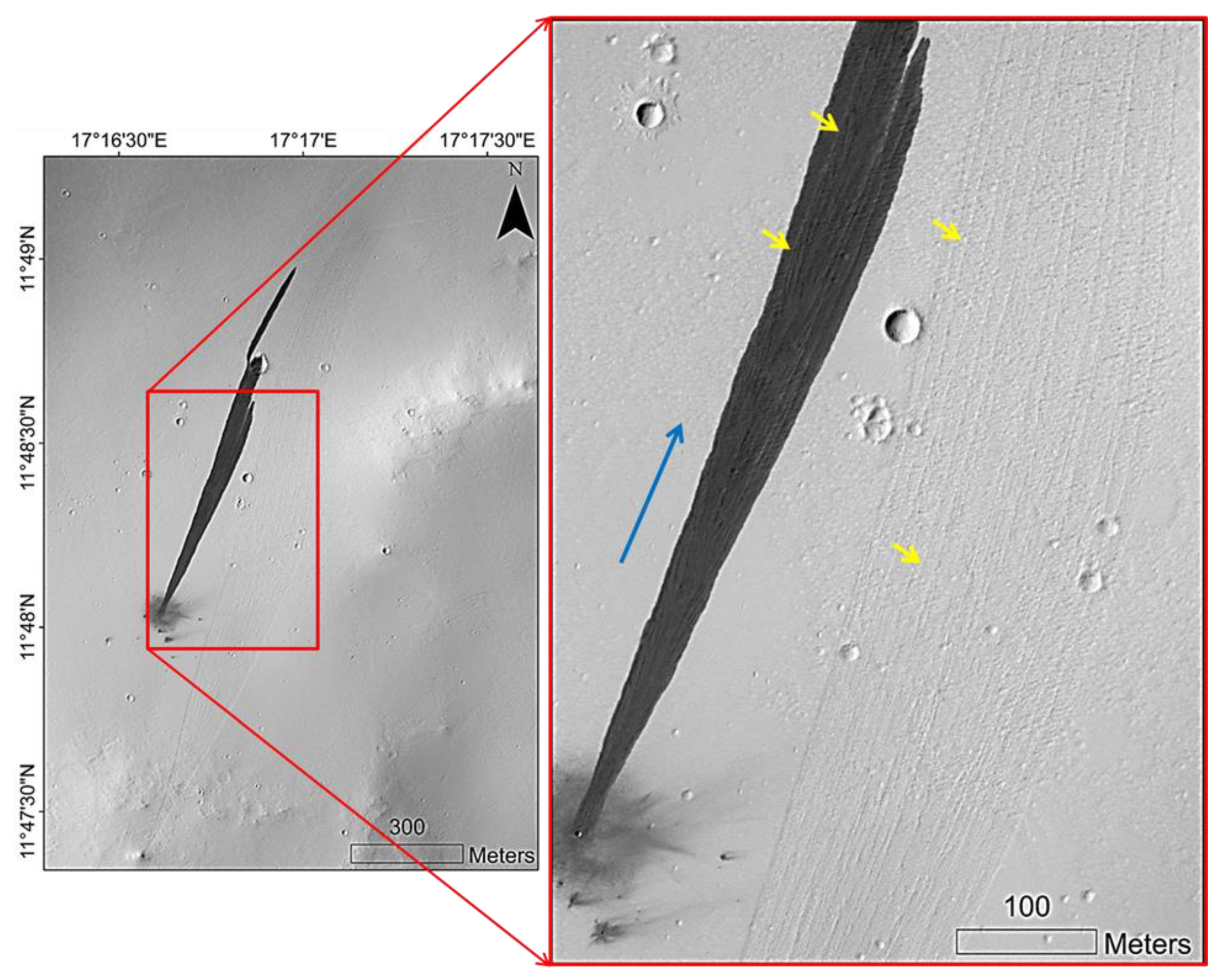
4.3. Salar de Uyuni as an Analogue for the Martian Brine Environment
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bhardwaj, A.; Sam, L.; Akanksha; Martín-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Gago, J.; Douthe, C.; Coopman, R.; Gallego, P.; Ribas-Carbo, M.; Flexas, J.; Escalona, J.; Medrano, H. UAVs challenge to assess water stress for sustainable agriculture. Agric. Water Manag. 2015, 153, 9–19. [Google Scholar] [CrossRef]
- Luna, I.; Lobo, A. Mapping Crop Planting Quality in Sugarcane from UAV Imagery: A Pilot Study in Nicaragua. Remote Sens. 2016, 8, 500. [Google Scholar] [CrossRef]
- Chianucci, F.; Disperati, L.; Guzzi, D.; Bianchini, D.; Nardino, V.; Lastri, C.; Rindinella, A.; Corona, P. Estimation of canopy attributes in beech forests using true colour digital images from a small fixed-wing UAV. Int. J. Appl. Earth Obs. Geoinf. 2016, 47, 60–68. [Google Scholar] [CrossRef]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using Unmanned Aerial Vehicles (UAV) to Quantify Spatial Gap Patterns in Forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef]
- Goldbergs, G.; Maier, S.W.; Levick, S.R.; Edwards, A. Efficiency of Individual Tree Detection Approaches Based on Light-Weight and Low-Cost UAS Imagery in Australian Savannas. Remote Sens. 2018, 10, 161. [Google Scholar] [CrossRef]
- Mikita, T.; Janata, P.; Surový, P. Forest Stand Inventory Based on Combined Aerial and Terrestrial Close-Range Photogrammetry. Forests 2016, 7, 165. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Koeva, M.; Muneza, M.; Gevaert, C.; Gerke, M.; Nex, F. Using UAVs for map creation and updating. A case study in Rwanda. Surv. Rev. 2018, 50, 312–325. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Flynn, K.F.; Chapra, S.C. Remote Sensing of Submerged Aquatic Vegetation in a Shallow Non-Turbid River Using an Unmanned Aerial Vehicle. Remote Sens. 2014, 6, 12815–12836. [Google Scholar] [CrossRef]
- Liu, T.; Abd-Elrahman, A.; Morton, J.; Wilhelm, V.L.; Jon, M. Comparing fully convolutional networks, random forest, support vector machine, and patch-based deep convolutional neural networks for object-based wetland mapping using images from small unmanned aircraft system. GISci. Remote Sens. 2018, 55, 243–264. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Iizuka, K.; Itoh, M.; Shiodera, S.; Matsubara, T.; Dohar, M.; Watanabe, K. Advantages of unmanned aerial vehicle (UAV) photogrammetry for landscape analysis compared with satellite data: A case study of postmining sites in Indonesia. Cogent Geosci. 2018, 4, 1–15. [Google Scholar] [CrossRef]
- Tong, X.; Liu, X.; Chen, P.; Liu, S.; Luan, K.; Li, L.; Liu, S.; Liu, X.; Xie, H.; Jin, Y.; et al. Integration of UAV-Based Photogrammetry and Terrestrial Laser Scanning for the Three-Dimensional Mapping and Monitoring of Open-Pit Mine Areas. Remote Sens. 2015, 7, 6635–6662. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; De Jong, S.M. Time Series Analysis of Landslide Dynamics Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- De Reu, J.; De Smedt, P.; Herremans, D.; Van Meirvenne, M.; Laloo, P.; De Clercq, W. On introducing an image-based 3D reconstruction method in archaeological excavation practice. J. Archaeol. Sci. 2014, 41, 251–262. [Google Scholar] [CrossRef]
- Storlazzi, C.D.; Dartnell, P.; Hatcher, G.A.; Gibbs, A.E. End of the chain? Rugosity and fine-scale bathymetry from existing underwater digital imagery using structure-from-motion (SfM) technology. Coral Reefs 2016, 35, 889–894. [Google Scholar] [CrossRef]
- Jaud, M.; Grasso, F.; Le Dantec, N.; Verney, R.; Delacourt, C.; Ammann, J.; Deloffre, J.; Grandjean, P. Potential of UAVs for Monitoring Mudflat Morphodynamics (Application to the Seine Estuary, France). ISPRS Int. J. Geo-Inf. 2016, 5, 50. [Google Scholar] [CrossRef]
- Long, N.; Millescamps, B.; Guillot, B.; Pouget, F.; Bertin, X. Monitoring the Topography of a Dynamic Tidal Inlet Using UAV Imagery. Remote Sens. 2016, 8, 387. [Google Scholar] [CrossRef]
- Kalacska, M.; Chmura, G.; Lucanus, O.; Bérubé, D.; Arroyo-Mora, J. Structure from motion will revolutionize analyses of tidal wetland landscapes. Remote Sens. Environ. 2017, 199, 14–24. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jensen, R.R. Small-Scale Unmanned Aerial Vehicles in Environmental Remote Sensing: Challenges and Opportunities. GISci. Remote Sens. 2011, 48, 99–111. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2013, 6, 1–15. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 69–85. [Google Scholar] [CrossRef]
- Milewski, R.; Chabrillat, S.; Behling, R. Analyses of Recent Sediment Surface Dynamic of a Namibian Kalahari Salt Pan Based on Multitemporal Landsat and Hyperspectral Hyperion Data. Remote Sens. 2017, 9, 170. [Google Scholar] [CrossRef]
- Svendsen, J.B. Parabolic halite dunes on the Salar de Uyuni, Bolivia. Sediment. Geol. 2003, 155, 147–156. [Google Scholar] [CrossRef]
- Belnap, J.; Munson, S.M.; Field, J.P. Aeolian and fluvial processes in dryland regions: The need for integrated studies. Ecohydrology 2011, 4, 615–622. [Google Scholar] [CrossRef]
- USGS. Mineral Commodities Summary. 2017. Available online: https://minerals.usgs.gov/minerals/pubs/mcs/ (accessed on 5 December 2018).
- Marazuela, M.; Vázquez-Suñè, E.; Custodio, E.; Palma, T.; Garcia-Gil, A.; Ayora, C. 3D mapping, hydrodynamics and modelling of the freshwater-brine mixing zone in salt flats similar to the Salar de Atacama (Chile). J. Hydrol. 2018, 561, 223–235. [Google Scholar] [CrossRef]
- Dieng, N.M.; Dinis, J.; Faye, S.; Gonçalves, M.; Caetano, M. Combined Uses of Supervised Classification and Normalized Difference Vegetation Index Techniques to Monitor Land Degradation in the Saloum Saline Estuary System. In Estuaries of the World; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2014; pp. 49–63. [Google Scholar]
- Kumar, L.; Sinha, P. Mapping salt-marsh land-cover vegetation using high-spatial and hyperspectral satellite data to assist wetland inventory. GISci. Remote Sens. 2014, 51, 483–497. [Google Scholar] [CrossRef]
- Lee, Y.-K.; Park, J.-W.; Choi, J.-K.; Oh, Y.; Won, J.-S. Potential uses of TerraSAR-X for mapping herbaceous halophytes over salt marsh and tidal flats. Estuarine Coast. Shelf Sci. 2012, 115, 366–376. [Google Scholar] [CrossRef]
- Alphan, H.; Yilmaz, K.T.; Yılmaz, K.T. Monitoring Environmental Changes in the Mediterranean Coastal Landscape: The Case of Cukurova, Turkey. Environ. Manag. 2005, 35, 607–619. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Liu, Y.; Zhao, S.; Zhou, M.; Yang, Y.; Li, F. Classification mapping and species identification of salt marshes based on a short-time interval NDVI time-series from HJ-1 optical imagery. Int. J. Appl. Earth Obs. Geoinf. 2016, 45, 27–41. [Google Scholar] [CrossRef]
- Shalaby, A.; Tateishi, R. Remote sensing and GIS for mapping and monitoring land cover and land-use changes in the Northwestern coastal zone of Egypt. Appl. Geogr. 2007, 27, 28–41. [Google Scholar] [CrossRef]
- Silvestri, S.; Marani, M.; Marani, A. Hyperspectral remote sensing of salt marsh vegetation, morphology and soil topography. Phys. Chem. Earth Parts A/B/C 2003, 28, 15–25. [Google Scholar] [CrossRef]
- Kourkouli, P.; Wegmüller, U.; Teatini, P.; Tosi, L.; Strozzi, T.; Wiesmann, A.; Tansey, K. Ground Deformation Monitoring Over Venice Lagoon Using Combined DInSAR/PSI Techniques. In Engineering Geology for Society and Territory Volume 4; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2014; pp. 183–186. [Google Scholar]
- Kampf, S.K.; Tyler, S.W.; Ortiz, C.A.; Muñoz, J.F.; Adkins, P.L. Evaporation and land surface energy budget at the Salar de Atacama, Northern Chile. J. Hydrol. 2005, 310, 236–252. [Google Scholar] [CrossRef]
- Turk, L. Diurnal fluctuations of water tables induced by atmospheric pressure changes. J. Hydrol. 1975, 26, 1–16. [Google Scholar] [CrossRef]
- Mason, J.L.; Kipp, K.L. Hydrology of the Bonneville Salt Flats, Northwestern Utah, and Simulation of Gound-Water Flow and Solute Transport in the Shallow-Brine Aquifer; United States Geological Professional Paper 1585; U.S. Geological Survey: Denver, CO, USA, 1997.
- Kesler, S.E.; Gruber, P.W.; Medina, P.A.; Keoleian, G.A.; Everson, M.P.; Wallington, T.J. Global lithium resources: Relative importance of pegmatite, brine and other deposits. ORE Geol. Rev. 2012, 48, 55–69. [Google Scholar] [CrossRef]
- Goudie, A.S.; Watson, A. Rock block monitoring of rapid salt weathering in southern Tunisia. Earth Surf. Process. Landf. 1984, 9, 95–98. [Google Scholar] [CrossRef]
- White, W.W., III. Salt Laydown Project-Replenishment of salt to the Bonneville Salt Flats. In Great Salt Lake-An Overview of Change: Special Publication of the Utah Department of Natural Resources; Utah Geological Survey: Salt Lake City, UT, USA, 2002; pp. 433–486. [Google Scholar]
- Rosen, M.R. The Importance of Groundwater in Playas: A Review of Playa Classifications and the Sedimentology and Hydrology of Playas. Geol. Soc. Am. Spec. Pap. 1994, 289, 1–18. [Google Scholar] [CrossRef]
- El-Maarry, M.R.; Watters, W.A.; Yoldi, Z.; Pommerol, A.; Fischer, D.; Eggenberger, U.; Thomas, N. Dried Lakes in Western United States as Analogue to Desiccation Fractures on Mars. In Proceedings of the 47th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 21–25 March 2016. [Google Scholar]
- El-Maarry, M.R.; Pommerol, A.; Thomas, N. Desiccation of phyllosilicate-bearing samples as analog for desiccation cracks on Mars: Experimental setup and initial results. Planet. Space Sci. 2015, 111, 134–143. [Google Scholar] [CrossRef]
- Edwards, H.G.M.; Mohsin, M.A.; Sadooni, F.N.; Hassan, N.F.N.; Munshi, T. Life in the sabkha: Raman spectroscopy of halotrophic extremophiles of relevance to planetary exploration. Anal. Bioanal. Chem. 2006, 385, 46–56. [Google Scholar] [CrossRef] [PubMed]
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Zorzano, M.-P. Are Slope Streaks Indicative of Global-Scale Aqueous Processes on Contemporary Mars? Rev. Geophys. 2019, 57, 48–77. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Zorzano, M.-P. Revisiting Enigmatic Martian Slope Streaks. EOS 2019, 100. [Google Scholar] [CrossRef]
- McEwen, A.S.; Ojha, L.; Dundas, C.M.; Mattson, S.S.; Byrne, S.; Wray, J.J.; Cull, S.C.; Murchie, S.L.; Thomas, N.; Gulick, V.C. Seasonal Flows on Warm Martian Slopes. Science 2011, 333, 740–743. [Google Scholar] [CrossRef]
- Ojha, L.; Wilhelm, M.B.; Murchie, S.L.; McEwen, A.S.; Wray, J.J.; Hanley, J.; Massé, M.; Chojnacki, M.; Chojnacki, M. Spectral evidence for hydrated salts in recurring slope lineae on Mars. Nat. Geosci. 2015, 8, 829–832. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Zorzano, M.-P.; Fonseca, R.M. Martian slope streaks as plausible indicators of transient water activity. Sci. Rep. 2017, 7, 7074. [Google Scholar] [CrossRef]
- Head, J.W.; Marchant, D.R.; Dickson, J.L.; Levy, J.S.; Morgan, G.A. Slope Streaks in the Antarctic Dry Valleys: Characteristics, Candidate Formation Mechanisms, and Implications for Slope Streak Formation in the Martian Environment; U.S. Geological Survey: Denver, CO, USA, 2007.
- Kreslavsky, M.A.; Head, J.W. Slope streaks on Mars: A new “wet” mechanism. Icarus 2009, 201, 517–527. [Google Scholar] [CrossRef]
- Rettberg, P.; Anesio, A.M.; Baker, V.R.; Baross, J.A.; Cady, S.L.; Detsis, E.; Foreman, C.M.; Hauber, E.; Ori, G.G.; Pearce, D.A.; et al. Planetary Protection and Mars Special Regions—A Suggestion for Updating the Definition. Astrobiology 2016, 16, 119–125. [Google Scholar] [CrossRef] [PubMed]
- Rummel, J.D. Special regions in Mars exploration: Problems and potential. Acta Astronaut. 2009, 64, 1293–1297. [Google Scholar] [CrossRef]
- Rummel, J.D.; Beaty, D.W.; Jones, M.A.; Bakermans, C.; Barlow, N.G.; Boston, P.J.; Chevrier, V.F.; Clark, B.C. de Vera Jean-Pierre, P.; Gough, R.V.; et al. A new analysis of Mars “special regions”: Findings of the second MEPAG Special Regions Science Analysis Group (SR-SAG2). Astrobiology 2014, 14, 887–968. [Google Scholar] [CrossRef] [PubMed]
- Chevrier, V.F.; Rivera-Valentin, E.G. Formation of recurring slope lineae by liquid brines on present-day Mars. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- Levy, J. Hydrological characteristics of recurrent slope lineae on Mars: Evidence for liquid flow through regolith and comparisons with Antarctic terrestrial analogs. Icarus 2012, 219, 1–4. [Google Scholar] [CrossRef]
- Mitchell, J.L.; Christensen, P.R. Recurring slope lineae and chlorides on the surface of Mars. J. Geophys. Res. Planets 2016, 121, 1411–1428. [Google Scholar] [CrossRef]
- Stillman, D.E.; Michaels, T.I.; Grimm, R.E.; Harrison, K.P. New observations of Martian southern mid-latitude recurring slope lineae (RSL) imply formation by freshwater subsurface flows. Icarus 2014, 233, 328–341. [Google Scholar] [CrossRef]
- Stillman, D.E.; Michaels, T.I.; Grimm, R.E.; Hanley, J. Observations and modeling of northern mid-latitude recurring slope lineae (RSL) suggest recharge by a present-day martian briny aquifer. Icarus 2016, 265, 125–138. [Google Scholar] [CrossRef]
- Schmidt, F.; Andrieu, F.; Costard, F.; Kocifaj, M.; Meresescu, A.G. Formation of recurring slope lineae on Mars by rarefied gas-triggered granular flows. Nat. Geosci. 2017, 10, 270–273. [Google Scholar] [CrossRef]
- Dundas, C.M.; McEwen, A.S.; Chojnacki, M.; Milazzo, M.P.; Byrne, S.; McElwaine, J.N.; Urso, A. Granular flows at recurring slope lineae on Mars indicate a limited role for liquid water. Nat. Geosci. 2017, 10, 903–907. [Google Scholar] [CrossRef]
- Masse, M.; Conway, S.J.; Gargani, J.; Patel, M.R.; Pasquon, K.; McEwen, A.; Carpy, S.; Chévrier, V.; Balme, M.R.; Ojha, L.; et al. Transport processes induced by metastable boiling water under Martian surface conditions. Nat. Geosci. 2016, 9, 425–428. [Google Scholar] [CrossRef]
- Chojnacki, M.; McEwen, A.; Dundas, C.; Ojha, L.; Urso, A.; Sutton, S. Geologic context of recurring slope lineae in Melas and Coprates Chasmata, Mars. J. Geophys. Res. Planets 2016, 121, 1204–1231. [Google Scholar] [CrossRef]
- Edwards, C.S.; Piqueux, S. The water content of recurring slope lineae on Mars. Geophys. Res. Lett. 2016, 43, 8912–8919. [Google Scholar] [CrossRef]
- Grimm, R.E.; Harrison, K.P.; Stillman, D.E. Water budgets of martian recurring slope lineae. Icarus 2014, 233, 316–327. [Google Scholar] [CrossRef]
- Mars Helicopter to Fly on NASA’s Next Red Planet Rover Mission. Available online: https://www.nasa.gov/press-release/mars-helicopter-to-fly-on-nasa-s-next-red-planet-rover-mission (accessed on 5 June 2019).
- Risacher, F.; Alonso, H.; Salazar, C. The origin of brines and salts in Chilean salars: A hydrochemical review. Earth-Sci. Rev. 2003, 63, 249–293. [Google Scholar] [CrossRef]
- Baker, P.A.; Rigsby, C.A.; Seltzer, G.O.; Fritz, S.C.; Lowenstein, T.K.; Bacher, N.P.; Veliz, C. Tropical climate changes at millennial and orbital timescales on the Bolivian Altiplano. Nature 2001, 409, 698–701. [Google Scholar] [CrossRef]
- Lamparelli, R.C.; Ponzoni, F.; Zullo, J.; Pellegrino, G.Q.; Arnaud, Y. Characterization of the salar de uyuni for in-orbit satellite calibration. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1461–1468. [Google Scholar] [CrossRef]
- Gush, W.G. The Decline of the Globally Threatened Rudd’s Lark in One of Its Last Remaining Core Sites, the Wakkerstroom Grasslands. Ph.D. Thesis, University of Cape Town, Cape Town, South Africa, 2017. Available online: https://open.uct.ac.za/handle/11427/25011 (accessed on 31 August 2018).
- Jones, K. An Inventory and Mapping of Cliffs within the South Cumberland Plateau Region of Tennessee. Master’s Thesis, The University of Tennessee at Chattanooga, Chattanooga, TN, USA, May 2018. Available online: https://scholar.utc.edu/theses/562/ (accessed on 31 August 2018).
- Lindstrøm, I.M. No Mitigating Effects of Roadside Vegetation Clearing on Ungulate-Vehicle Collisions in Nord-Trøndelag. Master’s Thesis, Norwegian University of Science and Technology (NTNU), Trondheim, Norway, 2016. Available online: https://brage.bibsys.no/xmlui/handle/11250/2391557 (accessed on 31 August 2018).
- Tussadiah, A.; Subandriyo, J.; Novita, S.; Pranowo, W.S. Verification of Pisces Dissolved Oxygen Model Using in Situ Measurement in Biak, Rote, And Tanimbar Seas, Indonesia. Int. J. Remote Sens. Earth Sci. (IJReSES) 2017, 14, 37–46. [Google Scholar] [CrossRef][Green Version]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. Lond. Ser. B Boil. Sci. 1979, 203, 405–426. [Google Scholar]
- Sona, G.; Pinto, L.; Pagliari, D.; Passoni, D.; Gini, R. Experimental analysis of different software packages for orientation and digital surface modelling from UAV images. Earth Sci. Inform. 2014, 7, 97–107. [Google Scholar] [CrossRef]
- Burns, J.; Delparte, D.; Gates, R.; Takabayashi, M. Integrating structure-from-motion photogrammetry with geospatial software as a novel technique for quantifying 3D ecological characteristics of coral reefs. PeerJ 2015, 3, e1077. [Google Scholar] [CrossRef]
- Kersten, T.P.; Lindstaedt, M. Image-based low-cost systems for automatic 3D recording and modelling of archaeological finds and objects. In Euro-Mediterranean Conference; Springer: Berlin/Heidelberg, Germany, 2012; pp. 1–10. [Google Scholar]
- Themistocleous, K.; Ioannides, M.; Agapiou, A.; Hadjimitsis, D.G. The methodology of documenting cultural heritage sites using photogrammetry, UAV, and 3D printing techniques: The case study of Asinou Church in Cyprus. In Third International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2015); International Society for Optics and Photonics: Bellingham, WA, USA, 2015; Volume 9535, p. 953510. [Google Scholar]
- Verhoeven, G. Software review taking computer vision aloft—Archaeological three-dimensional reconstructions from aerial photographs with PhotoScan. Archaeol. Prospect. 2011, 73, 67–73. [Google Scholar] [CrossRef]
- Furukawa, Y.; Ponce, J. Accurate Camera Calibration from Multi-View Stereo and Bundle Adjustment. Int. J. Comput. Vis. 2009, 84, 257–268. [Google Scholar] [CrossRef]
- Sam, L.; Bhardwaj, A.; Singh, S.; Kumar, R. Remote sensing flow velocity of debris-covered glaciers using Landsat 8 data. Prog. Phys. Geogr. 2016, 40, 305–321. [Google Scholar] [CrossRef]
- Sam, L.; Bhardwaj, A.; Kumar, R.; Buchroithner, M.F.; Martín-Torres, F.J. Heterogeneity in topographic control on velocities of Western Himalayan glaciers. Sci. Rep. 2018, 8, 12843. [Google Scholar] [CrossRef]
- Singh, M.K.; Snehmani Gupta, R.D.; Bhardwaj, A.; Joshi, P.K.; Ganju, A. High resolution DEM generation for complex and snow covered Indian Himalayan region using ADS80 Aerial Push-broom camera: A first time attempt. Arab. J. Geosci. 2015, 8, 1403–1414. [Google Scholar] [CrossRef]
- Singh, M.K.; Gupta, R.D.; Snehmani Bhardwaj, A.; Ganju, A. Scenario-based validation of moderate resolution DEMs freely available for complex Himalayan terrain. Pure Appl. Geophys. 2016, 173, 463–485. [Google Scholar] [CrossRef]
- Snehmani Bhardwaj, A.; Pandit, A.; Ganju, A. Demarcation of potential avalanche sites using remote sensing and ground observations: A case study of Gangotri glacier. Geocarto Int. 2014, 29, 520–535. [Google Scholar] [CrossRef]
- Burrough, P.A.; McDonell, R.A. Principles of Geographical Information Systems; Oxford University Press: Oxford, UK, 1998; p. 190. [Google Scholar]
- Moore, I.D.; Grayson, R.B.; Landson, A.R. Digital Terrain Modelling: A Review of Hydrological, Geomorphological, and Biological Applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Zevenbergen, L.W.; Thorne, C.R. Quantitative analysis of land surface topography. Earth Surf. Process. Landf. 1987, 12, 47–56. [Google Scholar] [CrossRef]
- Wilson, M.F.J.; O’Connell, B.; Brown, C.; Guinan, J.C.; Grehan, A.J. Multiscale Terrain Analysis of Multibeam Bathymetry Data for Habitat Mapping on the Continental Slope. Mar. Geodesy 2007, 30, 3–35. [Google Scholar] [CrossRef]
- De Smith, M.J.; Goodchild, M.F.; Longley, P. Geospatial Analysis: A Comprehensive Guide to Principles, Techniques and Software Tools; Troubador Publishing Ltd.: Leicester, UK, 2007. [Google Scholar]
- Etzelmüller, B. On the Quantification of Surface Changes using Grid-based Digital Elevation Models (DEMs). Trans. GIS 2000, 4, 129–143. [Google Scholar] [CrossRef]
- Brusnikin, E.S.; Kreslavsky, M.A.; Zubarev, A.E.; Patratiy, V.D.; Krasilnikov, S.S.; Head, J.W.; Karachevtseva, I.P. Topographic measurements of slope streaks on Mars. Icarus 2016, 278, 52–61. [Google Scholar] [CrossRef]
- Abermann, J.; Fischer, A.; Lambrecht, A.; Geist, T. On the potential of very high-resolution repeat DEMs in glacial and periglacial environments. Cryosphere 2010, 4, 53–65. [Google Scholar] [CrossRef]
- Wang, D.; Kääb, A. Modeling Glacier Elevation Change from DEM Time Series. Remote Sens. 2015, 7, 10117–10142. [Google Scholar] [CrossRef]
- Dickson, J.L.; Head, J.W.; Levy, J.S.; Marchant, D.R. Don Juan Pond, Antarctica: Near-surface CaCl2-brine feeding Earth’s most saline lake and implications for Mars. Sci. Rep. 2013, 3, 1166. [Google Scholar] [CrossRef]
- Gough, R.; Wong, J.; Dickson, J.; Levy, J.; Head, J.; Marchant, D.; Tolbert, M. Brine formation via deliquescence by salts found near Don Juan Pond, Antarctica: Laboratory experiments and field observational results. Earth Planet. Sci. Lett. 2017, 476, 189–198. [Google Scholar] [CrossRef]
- Levy, J.S.; Fountain, A.G.; Gooseff, M.N.; Welch, K.A.; Lyons, W.B.; Gooseff, M. Water tracks and permafrost in Taylor Valley, Antarctica: Extensive and shallow groundwater connectivity in a cold desert ecosystem. GSA Bull. 2011, 123, 2295–2311. [Google Scholar] [CrossRef]
- Badgeley, J.A.; Pettit, E.C.; Carr, C.G.; Tulaczyk, S.; Mikucki, J.A.; Lyons, W.B. MIDGE Science Team An englacial hydrologic system of brine within a cold glacier: Blood Falls, McMurdo Dry Valleys, Antarctica. J. Glaciol. 2017, 63, 387–400. [Google Scholar] [CrossRef]
- Rangecroft, S.; Suggitt, A.J.; Anderson, K.; Harrison, S. Future climate warming and changes to mountain permafrost in the Bolivian Andes. Clim. Chang. 2016, 137, 231–243. [Google Scholar] [CrossRef]
- Risacher, F.; Fritz, B. Origin of salts and brine evolution of Bolivian and Chilean salars. Aquat. Geochem. 2009, 15, 123–157. [Google Scholar] [CrossRef]
- Chuang, F.C.; Beyer, R.A.; McEwen, A.S.; Thomson, B.J. HiRISE observations of slope streaks on Mars. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Burleigh, K.J.; Melosh, H.J.; Tornabene, L.L.; Ivanov, B.; McEwen, A.S.; Daubar, I.J. Impact airblast triggers dust avalanches on Mars. Icarus 2012, 217, 194–201. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Zorzano, M.-P. Discovery of recurring slope lineae candidates in Mawrth Vallis, Mars. Sci. Rep. 2019, 9, 2040. [Google Scholar] [CrossRef] [PubMed]
- Bhardwaj, A.; Sam, L.; Martin-Torres, F.J.; Zorzano, M.-P. Distribution and Morphologies of Transverse Aeolian Ridges in ExoMars 2020 Rover Landing Site. Remote Sens. 2019, 11, 912. [Google Scholar] [CrossRef]
- El-Maarry, M.R.; Pommerol, A.; Thomas, N. Analysis of polygonal cracking patterns in chloride-bearing terrains on Mars: Indicators of ancient playa settings. J. Geophys. Res. Planets 2013, 118, 2263–2278. [Google Scholar] [CrossRef]
- Hudson, T.L.; Aharonson, O. Diffusion barriers at Mars surface conditions: Salt crusts, particle size mixtures, and dust. J. Geophys. Res. Space Phys. 2008, 113. [Google Scholar] [CrossRef]
- Barbieri, R.; Stivaletta, N. Continental evaporites and the search for evidence of life on Mars. Geol. J. 2011, 46, 513–524. [Google Scholar] [CrossRef]
- Fairén, A.G.; Davila, A.F.; Lim, D.; Bramall, N.; Bonaccorsi, R.; Zavaleta, J.; Uceda, E.R.; Stoker, C.; Wierzchos, J.; Dohm, J.M.; et al. Astrobiology through the Ages of Mars: The Study of Terrestrial Analogues to Understand the Habitability of Mars. Astrobiology 2010, 10, 821–843. [Google Scholar] [CrossRef]
- Hynek, B.M.; Osterloo, M.K.; Kierein-Young, K.S. Late-stage formation of Martian chloride salts through ponding and evaporation. Geology 2015, 43, 787–790. [Google Scholar] [CrossRef]
- Manfreda, S.; Dvorak, P.; Mullerova, J.; Herban, S.; Vuono, P.; Justel, J.A.; Perks, M. Assessing the Accuracy of Digital Surface Models Derived from Optical Imagery Acquired with Unmanned Aerial Systems. Drones 2019, 3, 15. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Flight altitude | 60 m |
| Expected image resolution | 1.8 cm/pixel |
| Battery used/flight | 1 |
| Side overlap | 70% |
| Front overlap | 85% |
| Total flight time | 15:39 minutes (Location 1); 15:42 minutes (Location 2) |
| Total area captured | ~70,000 m2 (Location 1); ~60,000 m2 (Location 2) |
| Total images captured | 301 (Location 1); 290 (Location 2) |
| Sample Number | Location Number | Maximum Length (m) | Maximum Width (m) | Area (m2) | Type |
|---|---|---|---|---|---|
| 1 | 2 | 40.09 | 5.58 | 70.46 | Linear, largely equidimensional shape with converging branching at the top |
| 2 | 2 | 9.12 | 3.68 | 11.96 | Top-to-middle-heavy shape with diverging branching at the bottom |
| 3 | 2 | 60.01 | 12.74 | 287.74 | Middle-to-bottom-heavy shape with diverging branching at the bottom |
| 4 | 2 | 78.00 | 8.76 | 196.88 | Linear, largely equidimensional shape with diverging branching in the middle and at the bottom |
| 5 | 1 | 67.75 | 59.24 | 1738.22 | Top-heavy, composite of multiple contributing brines and multiple terminus |
| Sample Number | Elevation (m) | Slope (Degrees) | Aspect (Degrees Clockwise from North) | Curvature (mm−1) | Roughness (mm) |
|---|---|---|---|---|---|
| 1 | Min *: 3661.58 | Min: 0 | Min: −1 (Flat) | Min: −12.76 | Min: 0 |
| Max +: 3662.71 | Max: 57.44 | Max: 359.57 | Max: 15.50 | Max: 87.40 | |
| Mean: 3661.96 | Mean: 3.49 | Mean: 166.67 | Mean: −0.06 | Mean: 3.40 | |
| SD #: 0.22 | SD: 2.64 | SD: 81.40 | SD: 0.78 | SD: 2.40 | |
| 2 | Min: 3661.70 | Min: 0 | Min: −1 (Flat) | Min: −3.66 | Min: 0 |
| Max: 3661.90 | Max: 16.29 | Max: 359.43 | Max: 3.72 | Max: 14.65 | |
| Mean: 3661.78 | Mean: 3.39 | Mean: 199.33 | Mean: −0.03 | Mean: 3.37 | |
| SD: 0.05 | SD: 2.12 | SD: 84.71 | SD: 0.65 | SD: 1.77 | |
| 3 | Min: 3661.30 | Min: 0 | Min: −1 (Flat) | Min: −14.95 | Min: 0 |
| Max: 3662.46 | Max: 39.94 | Max: 359.71 | Max: 10.01 | Max: 42.48 | |
| Mean: 3661.71 | Mean: 4.14 | Mean: 172.91 | Mean: −0.05 | Mean: 4.20 | |
| SD: 0.19 | SD: 2.99 | SD: 89.03 | SD: 0.93 | SD: 2.60 | |
| 4 | Min: 3661.52 | Min: 0 | Min: −1 (Flat) | Min: −52.79 | Min: 0 |
| Max: 3662.97 | Max: 71.78 | Max: 359.89 | Max: 48.22 | Max: 133.54 | |
| Mean: 3661.97 | Mean: 6.66 | Mean: 173.39 | Mean: −0.21 | Mean: 6.69 | |
| SD: 0.29 | SD: 6.01 | SD: 91.30 | SD: 1.68 | SD: 6.00 | |
| 5 | Min: 3665.59 | Min: 0 | Min: −1 (Flat) | Min: −9.52 | Min: 0 |
| Max: 3666.42 | Max: 51.96 | Max: 359.72 | Max: 13.06 | Max: 65.92 | |
| Mean: 3666.14 | Mean: 2.98 | Mean: 180.25 | Mean: −0.04 | Mean: 3.02 | |
| SD: 0.17 | SD: 2.33 | SD: 94.61 | SD: 0.70 | SD: 2.03 |
| Sample Number | ∆Elevation (m) | Average Volumetric Mass Movement (Mean Elevation Change × Area) (m3) | ∆Slope (Degrees) | ∆Aspect (Degrees Clockwise from North) | ∆Curvature (mm−1) | ∆Roughness (mm) |
|---|---|---|---|---|---|---|
| 1 | 2.8 × 10−3 ± 2.1 × 10−3 | 0.19 | −0.26 ± 3.35 | −13.33 ± 112.60 | −0.04 ± 1.12 | −0.20 ± 2.90 |
| 2 | 1.2 × 10−3 ± 1.1 × 10−3 | 0.02 | −0.16 ± 2.88 | −0.58 ± 110.48 | −0.02 ± 0.98 | −0.15 ± 2.41 |
| 3 | 4.3 × 10−3 ± 3.8 × 10−3 | 1.24 | −0.28 ± 3.85 | −13.01 ± 121.39 | −0.05 ± 1.29 | −0.22 ± 3.30 |
| 4 | 3.2 × 10−3 ± 2.7 × 10−3 | 0.63 | 0.27 ± 6.81 | −11.83 ± 125.24 | −0.19 ± 2.17 | 0.28 ± 6.47 |
| 5 | 2.4 × 10−3 ± 2.1 × 10−3 | 4.17 | −0.34 ± 3.92 | 1.02 ± 123.46 | −0.17 ± 1.05 | −0.65 ± 3.69 |
| Buffer 1 # | −3.3 × 10−4 ± 6.2 × 10−4 | 0.43 | −0.24 ± 2.75 | 2.24 ± 123.26 | −0.05 ± 0.84 | −0.17 ± 2.70 |
| Buffer 2 + | −4.2 × 10−4 ± 9.4 × 10−4 | 0.48 | −0.10 ± 5.58 | −13.94 ± 116.73 | −0.26 ± 1.83 | 0.25 ± 5.34 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Zorzano, M.-P.; Ramírez Luque, J.A. UAV Imaging of a Martian Brine Analogue Environment in a Fluvio-Aeolian Setting. Remote Sens. 2019, 11, 2104. https://doi.org/10.3390/rs11182104
Bhardwaj A, Sam L, Martín-Torres FJ, Zorzano M-P, Ramírez Luque JA. UAV Imaging of a Martian Brine Analogue Environment in a Fluvio-Aeolian Setting. Remote Sensing. 2019; 11(18):2104. https://doi.org/10.3390/rs11182104
Chicago/Turabian StyleBhardwaj, Anshuman, Lydia Sam, F. Javier Martín-Torres, María-Paz Zorzano, and Juan Antonio Ramírez Luque. 2019. "UAV Imaging of a Martian Brine Analogue Environment in a Fluvio-Aeolian Setting" Remote Sensing 11, no. 18: 2104. https://doi.org/10.3390/rs11182104
APA StyleBhardwaj, A., Sam, L., Martín-Torres, F. J., Zorzano, M.-P., & Ramírez Luque, J. A. (2019). UAV Imaging of a Martian Brine Analogue Environment in a Fluvio-Aeolian Setting. Remote Sensing, 11(18), 2104. https://doi.org/10.3390/rs11182104