Oceanic Mesoscale Eddy Detection Method Based on Deep Learning


Abstract
1. Introduction
2. Related Work
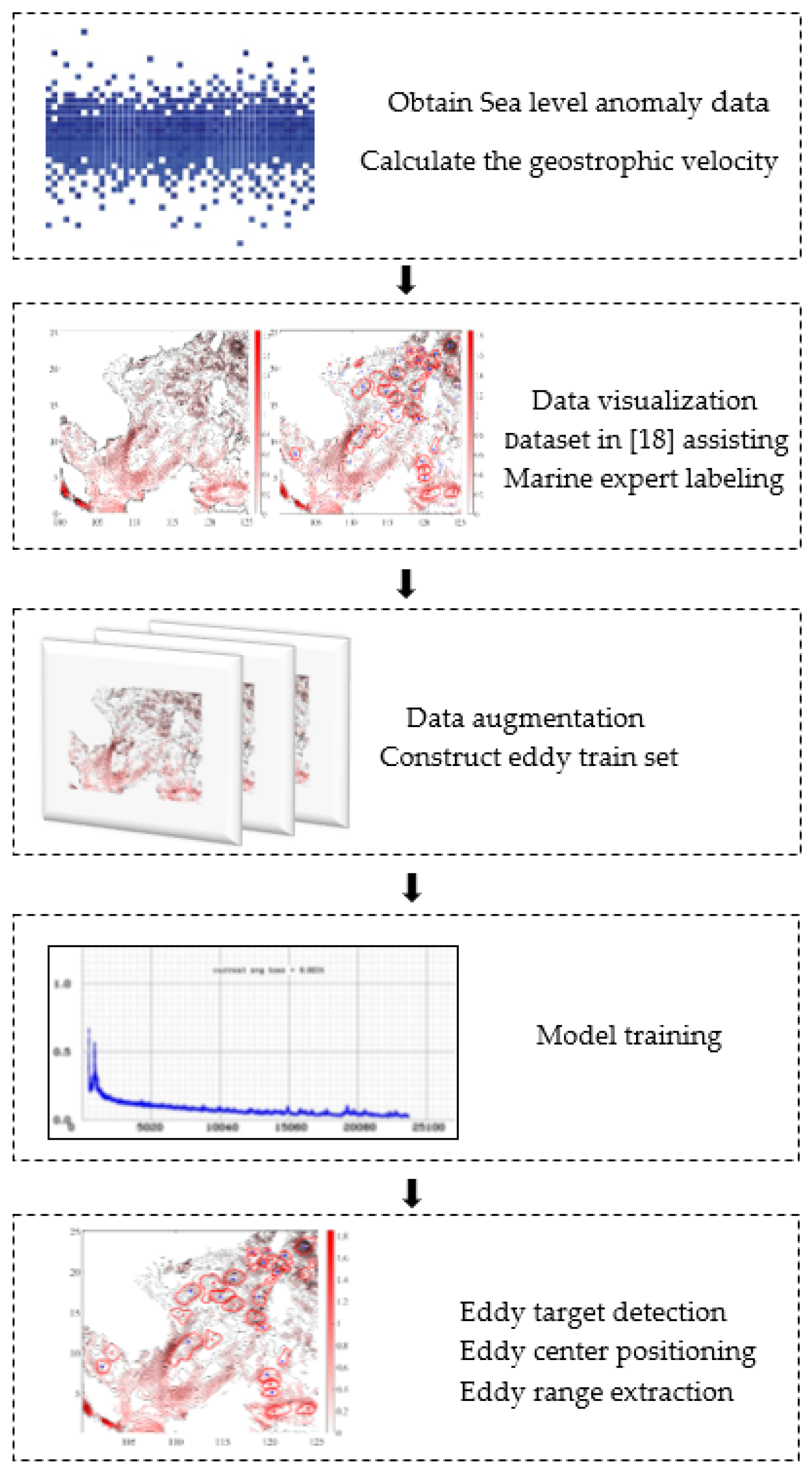
3. Outline of Our Method
4. Accurate Small Sample Acquisition and Data Augmentation
4.1. Accurate Sample Acquisition
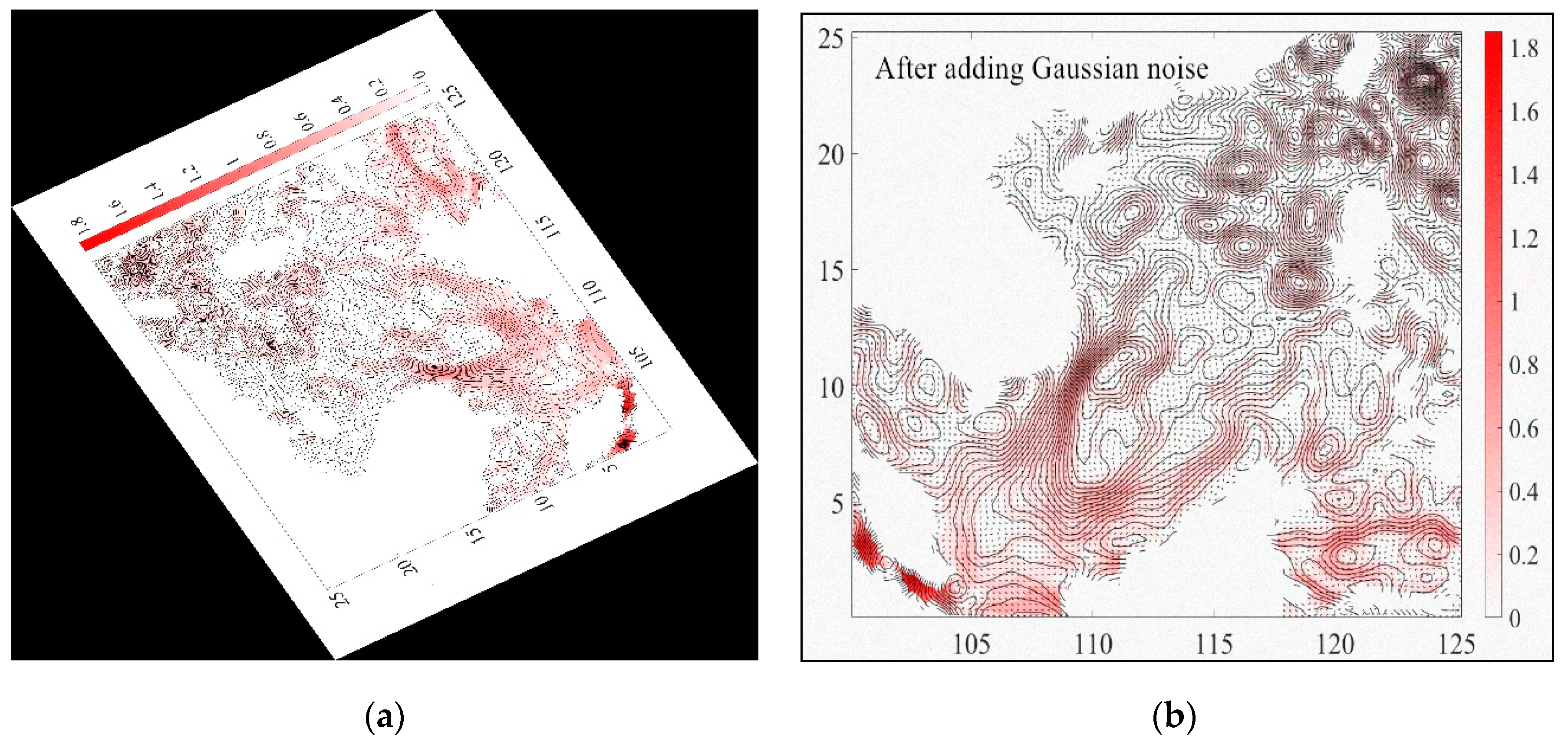
4.2. Data Augmentation
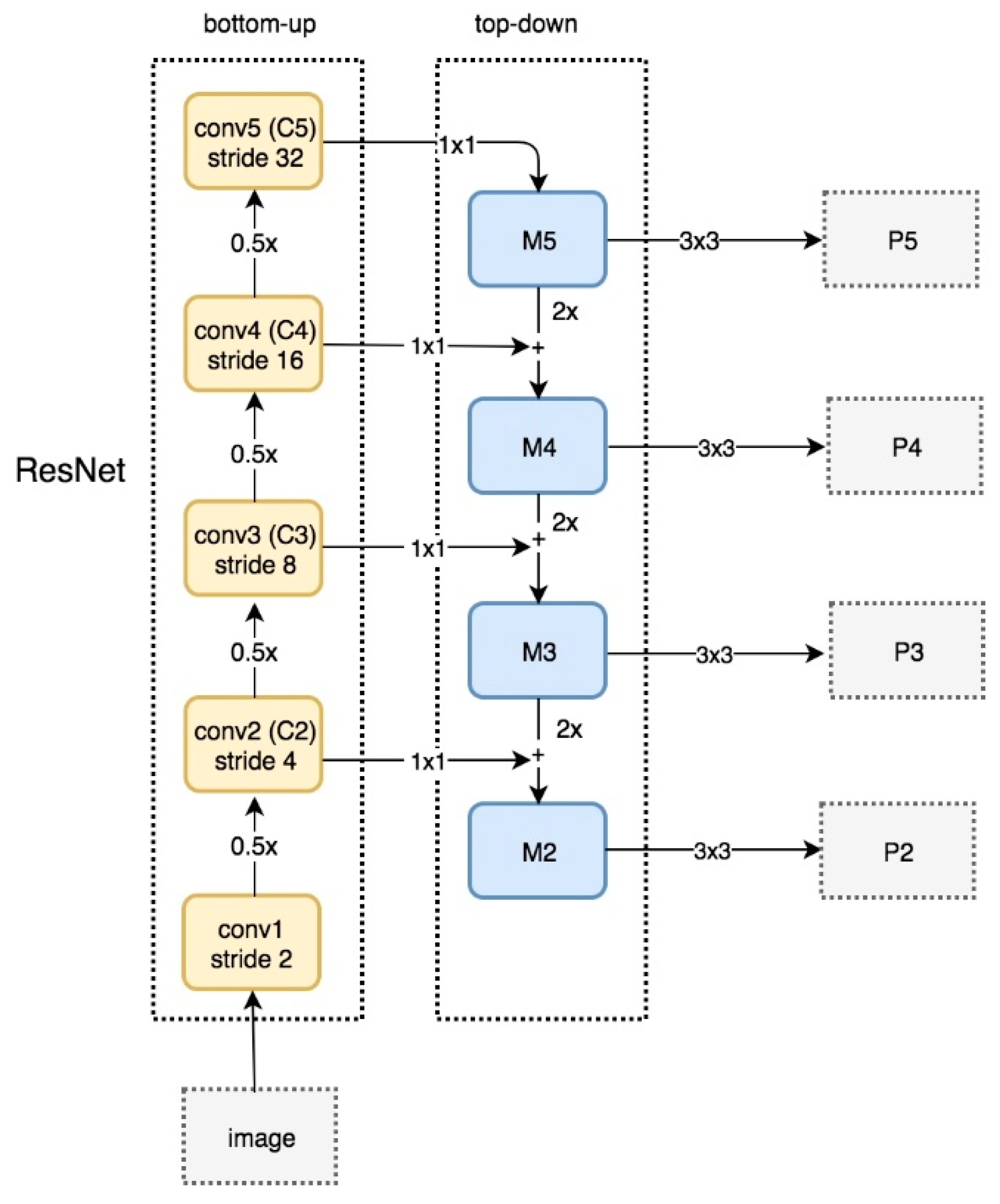
5. OEDNet Model Based on Object Detection Network
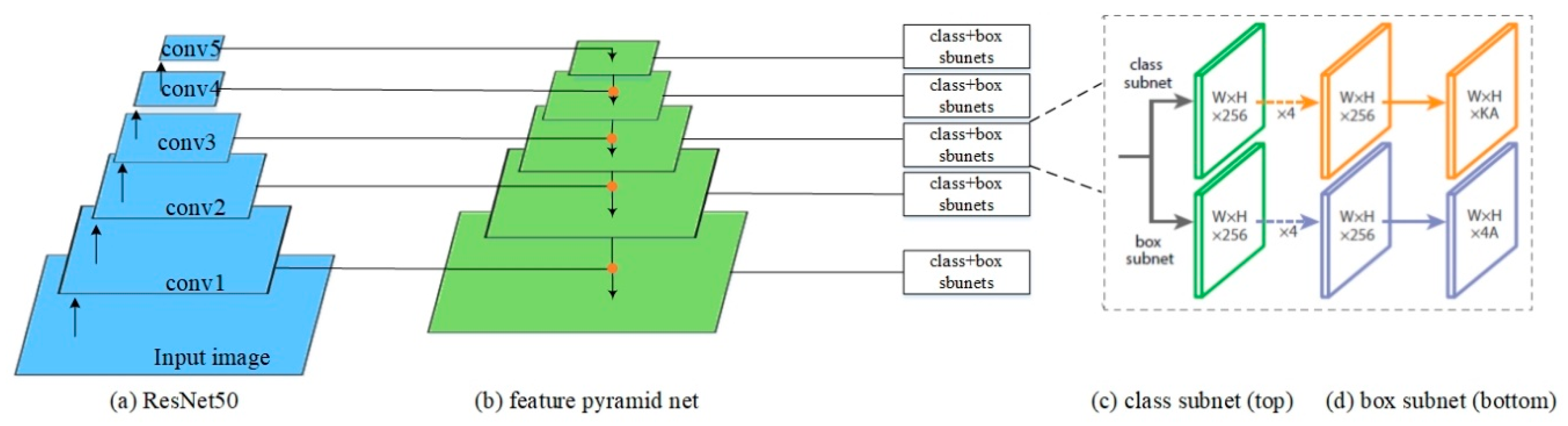
5.1. Network Structure
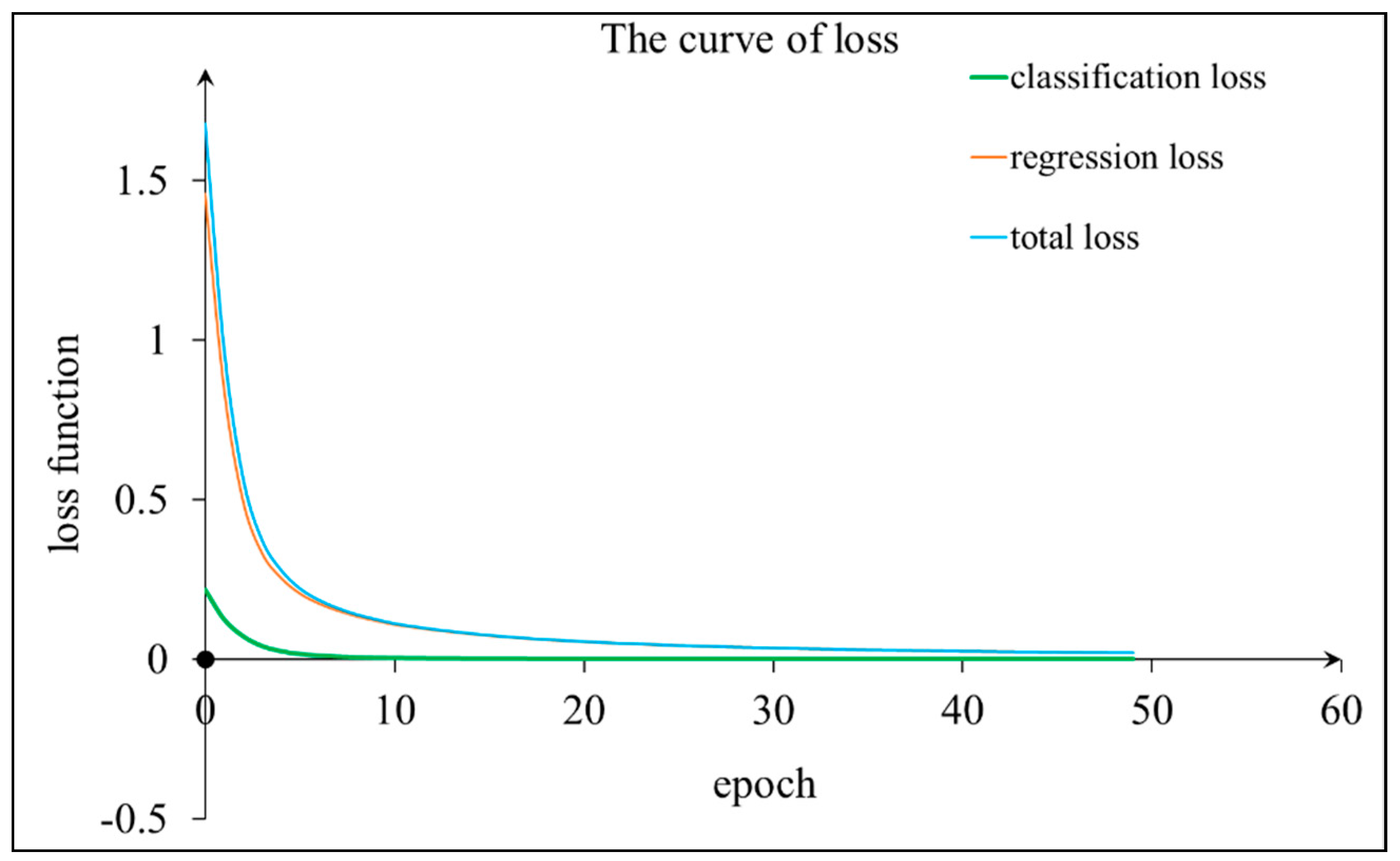
5.2. Network Training
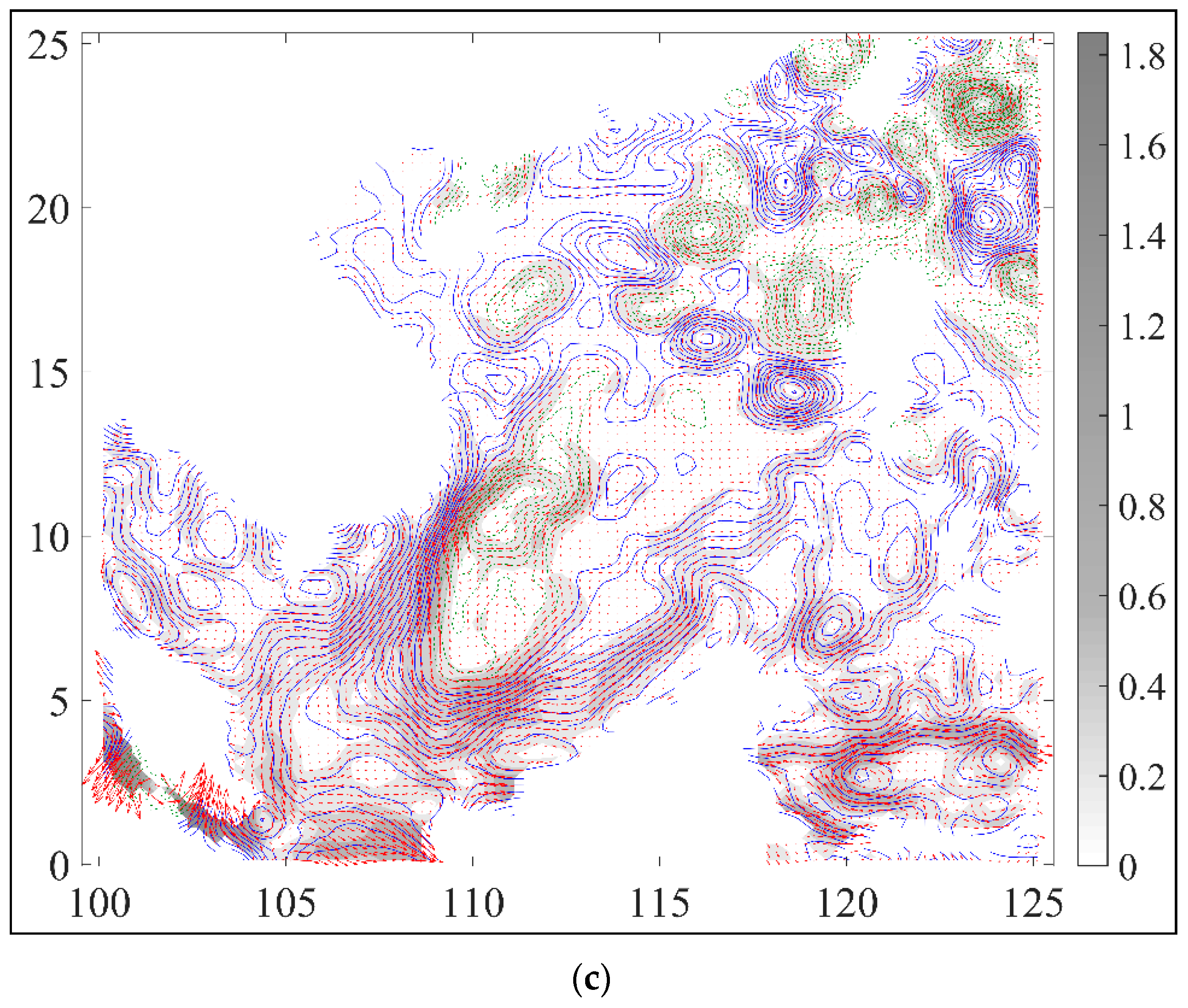
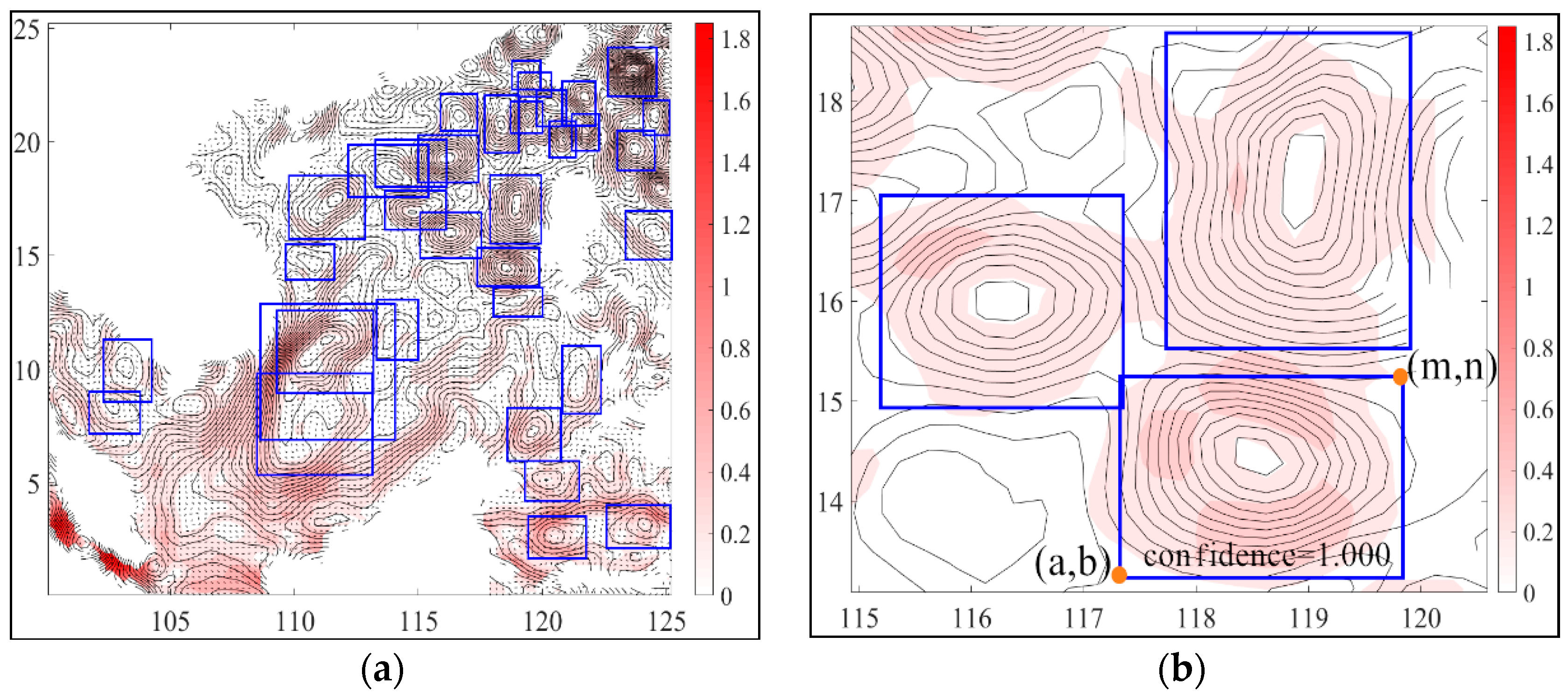
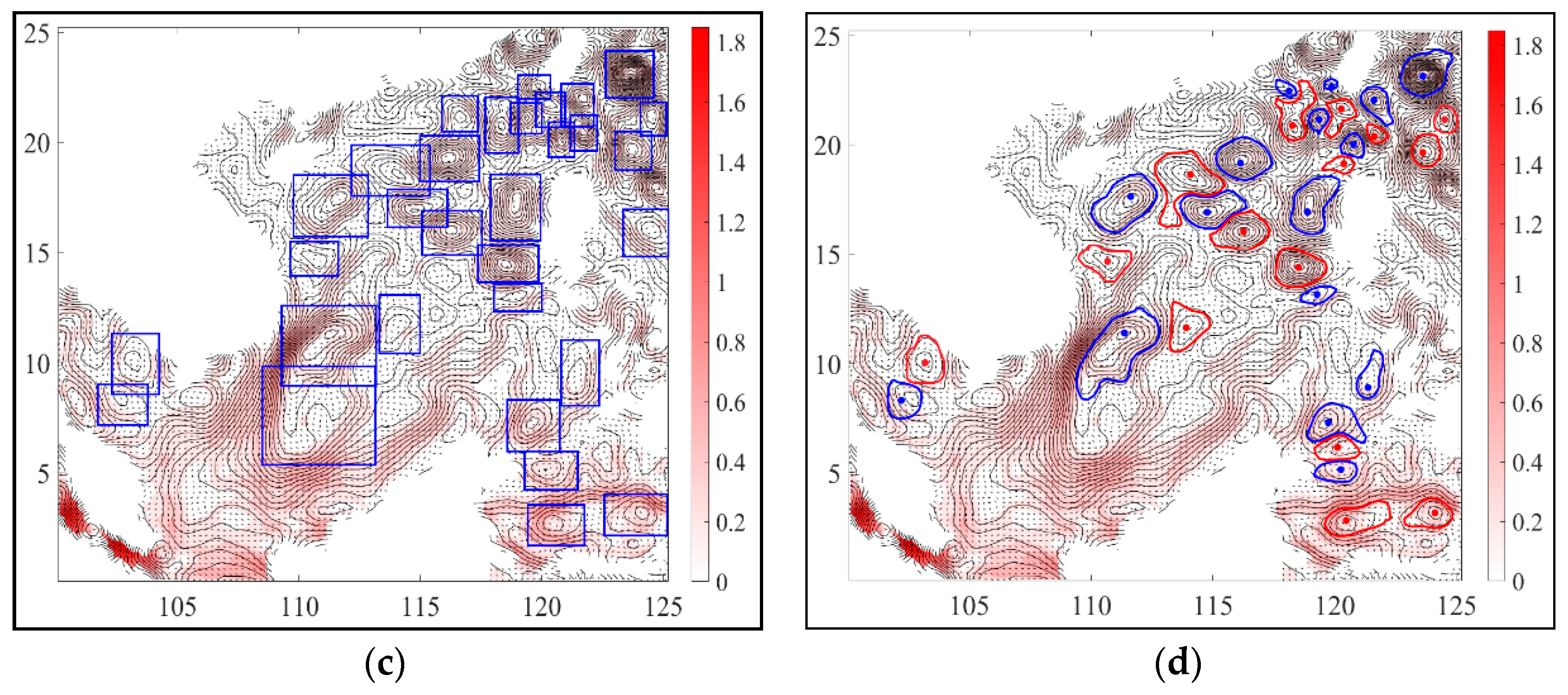
6. Eddy Center Positioning and Eddy Range Extraction
7. Result and Discussion
8. Conclusions and Prospects
Author Contributions
Funding
Conflicts of Interest
References
- Bennett, A.F.; White, W.B. Eddy heat flux in the subtropical North Pacific. J. Phys. Oceanogr. 1986, 16, 728–740. [Google Scholar] [CrossRef]
- Roemmich, D.; Gilson, J. Eddy transport of heat and thermocline waters in the North Pacific: A key to interannual/decadal climate variability. J. Phys. Oceanogr. 2001, 31, 675–687. [Google Scholar] [CrossRef]
- Hausmann, U.; Czaja, A. The observed signature of mesoscale eddies in sea surface temperature and the associated heat transport. Deep Sea Res. Part I Oceanogr. Res. Pap. 2012, 70, 60–72. [Google Scholar] [CrossRef]
- Gordon, A.L.; Giulivi, C.F. Ocean eddy freshwater flux convergence into the North Atlantic subtropics. J. Geophys. Res. Ocean. 2014, 119, 3327–3335. [Google Scholar] [CrossRef]
- Le Traon, P.; Morrow, R. Ocean currents and eddies. In International Geophysics; Elsevier: Amsterdam, The Netherlands, 2001; Volume 69, pp. 217–236. [Google Scholar]
- Frenger, I.; Gruber, N.; Knutti, R.; Münnich, M. Imprint of Southern Ocean eddies on winds, clouds and rainfall. Nat. Geosci. 2013, 6, 608. [Google Scholar] [CrossRef]
- Gaube, P.; Chelton, D.B.; Samelson, R.M.; Schlax, M.G.; O’Neill, L.W. Satellite observations of mesoscale eddy-induced Ekman pumping. J. Phys. Oceanogr. 2015, 45, 104–132. [Google Scholar] [CrossRef]
- Gaube, P.; Barceló, C.; McGillicuddy, D.J., Jr.; Domingo, A.; Miller, P.; Giffoni, B.; Marcovaldi, N.; Swimmer, Y. The use of mesoscale eddies by juvenile loggerhead sea turtles (Caretta caretta) in the southwestern Atlantic. PLoS ONE 2017, 12, e0172839. [Google Scholar] [CrossRef]
- Chaigneau, A.; Gizolme, A.; Grados, C. Mesoscale eddies off Peru in altimeter records: Identification algorithms and eddy spatio-temporal patterns. Prog. Oceanogr. 2008, 79, 106–119. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Weng, S.; Zhang, C.; Lin, Z. Exploring the structure of supervised data by Discriminant Isometric Mapping. Pattern Recognit. 2005, 38, 599–601. [Google Scholar] [CrossRef]
- Bao, S.; Zhang, R.; Wang, H.; Yan, H.; Yu, Y.; Chen, J. Salinity profile estimation in the Pacific Ocean from satellite surface salinity observations. J. Atmos. Ocean. Technol. 2019, 36, 53–68. [Google Scholar] [CrossRef]
- Zeng, X.; Li, Y.; He, R. Predictability of the loop current variation and eddy shedding process in the Gulf of Mexico using an artificial neural network approach. J. Atmos. Ocean. Technol. 2015, 32, 1098–1111. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 24–27 June 2014; pp. 580–587. [Google Scholar]
- Chelton, D.B.; Schlax, M.G.; Samelson, R.M. Global observations of nonlinear mesoscale eddies. Prog. Oceanogr. 2011, 91, 167–216. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- McGillicuddy, D.J., Jr.; Robinson, A.; Siegel, D.; Jannasch, H.; Johnson, R.; Dickey, T.; McNeil, J.; Michaels, A.; Knap, A. Influence of mesoscale eddies on new production in the Sargasso Sea. Nature 1998, 394, 263. [Google Scholar] [CrossRef]
- Faghmous, J.H.; Frenger, I.; Yao, Y.; Warmka, R.; Lindell, A.; Kumar, V. A daily global mesoscale ocean eddy dataset from satellite altimetry. Sci. Data 2015, 2, 150028. [Google Scholar] [CrossRef]
- Pascual, A.; Faugère, Y.; Larnicol, G.; Le Traon, P.Y. Improved description of the ocean mesoscale variability by combining four satellite altimeters. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Jiang, M.; Machiraju, R.; Thompson, D. Detection and Visualization of Vortices. In The Visualization Handbook; Elsevier: Amsterdam, The Netherlands, 2005; p. 295. [Google Scholar]
- Okubo, A. Horizontal dispersion of floatable particles in the vicinity of velocity singularities such as convergences. Deep Sea Res. Oceanogr. Abstr. 1970, 17, 445–454. [Google Scholar] [CrossRef]
- Weiss, J. The dynamics of enstrophy transfer in two-dimensional hydrodynamics. Phys. D Nonlinear Phenom. 1991, 48, 273–294. [Google Scholar] [CrossRef]
- Hunt, J. Vorticity and vortex dynamics in complex turbulent flows. Trans. Can. Soc. Mech. Eng. 1987, 11, 21–35. [Google Scholar] [CrossRef]
- Liu, C.; Wang, Y.; Yang, Y.; Duan, Z. New omega vortex identification method. Sci. China Phys. Mech. Astron. 2016, 59, 684711. [Google Scholar] [CrossRef]
- Chong, M.S.; Perry, A.E.; Cantwell, B.J. A general classification of three-dimensional flow fields. Phys. Fluids A Fluid Dyn. 1990, 2, 765–777. [Google Scholar] [CrossRef]
- Jeong, J.; Hussain, F. On the identification of a vortex. J. Fluid Mech. 1995, 285, 69–94. [Google Scholar] [CrossRef]
- McWilliams, J.C. The emergence of isolated coherent vortices in turbulent flow. J. Fluid Mech. 1984, 146, 21–43. [Google Scholar] [CrossRef]
- Chen, G.; Han, G.; Yang, X. On the intrinsic shape of oceanic eddies derived from satellite altimetry. Remote Sens. Environ. 2019, 228, 75–89. [Google Scholar] [CrossRef]
- Ashkezari, M.D.; Hill, C.N.; Follett, C.N.; Forget, G.; Follows, M.J. Oceanic eddy detection and lifetime forecast using machine learning methods. Geophys. Res. Lett. 2016, 43, 12234–12241. [Google Scholar] [CrossRef]
- Lguensat, R.; Sun, M.; Fablet, R.; Tandeo, P.; Mason, E.; Chen, G. EddyNet: A deep neural network for pixel-wise classification of oceanic eddies. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 June 2018; pp. 1764–1767. [Google Scholar]
- Xu, G.; Cheng, C.; Yang, W.; Xie, W.; Kong, L.; Hang, R.; Ma, F.; Dong, C.; Yang, J. Oceanic Eddy Identification Using an AI Scheme. Remote Sens. 2019, 11, 1349. [Google Scholar] [CrossRef]
- Neubeck, A.; Van Gool, L. Efficient non-maximum suppression. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; pp. 850–855. [Google Scholar]
- Zhang, W.-Z.; Ni, Q.; Xue, H. Composite eddy structures on both sides of the Luzon Strait and influence factors. Ocean Dyn. 2018, 68, 1527–1541. [Google Scholar] [CrossRef]
- Amores, A.; Jordà, G.; Arsouze, T.; Le Sommer, J. Up to what extent can we characterize ocean eddies using present-day gridded altimetric products. J. Geophys. Res. Ocean. 2018, 123, 7220–7236. [Google Scholar] [CrossRef]
- Klyatskin, V.; Koshel, K. Impact of diffusion on surface clustering in random hydrodynamic flows. Phys. Rev. E 2017, 95, 013109. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Recall | Precision | F-Measure | Execution Time (Sec) |
|---|---|---|---|---|
| Q-criterion | 71.31% | 65.21% | 0.681 | 5.21 |
| Ω-criterion | 77.24% | 77.51% | 0.774 | 6.49 |
| Δ-criterion | 84.23% | 39.69% | 0.540 | 7.07 |
| Okubo–Weiss parameter | 77.13% | 69.75% | 0.733 | 3.11 |
| Closed contour method (dataset in [18]) | 95.68% | 85.59% | 0.904 | 132.90 |
| Proposed method (OEDNet) | 94.61% | 96.65% | 0.956 | 7.10 |
| The Train Set of the Model | Recall | Precision | F-Measure |
|---|---|---|---|
| Original maps | 89.77% | 92.30% | 0.910 |
| Images only with added noise | 91.67% | 96.74% | 0.941 |
| Images with all data augmentation methods | 94.61% | 96.65% | 0.956 |
| Sea Area | Recall | Precision | F-Measure |
|---|---|---|---|
| Indian Ocean | 96.55% | 98.25% | 0.974 |
| Pacific Ocean | 95.31% | 98.39% | 0.968 |
| Atlantic Ocean | 92.59% | 98.03% | 0.952 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duo, Z.; Wang, W.; Wang, H. Oceanic Mesoscale Eddy Detection Method Based on Deep Learning. Remote Sens. 2019, 11, 1921. https://doi.org/10.3390/rs11161921
Duo Z, Wang W, Wang H. Oceanic Mesoscale Eddy Detection Method Based on Deep Learning. Remote Sensing. 2019; 11(16):1921. https://doi.org/10.3390/rs11161921
Chicago/Turabian StyleDuo, Zijun, Wenke Wang, and Huizan Wang. 2019. "Oceanic Mesoscale Eddy Detection Method Based on Deep Learning" Remote Sensing 11, no. 16: 1921. https://doi.org/10.3390/rs11161921
APA StyleDuo, Z., Wang, W., & Wang, H. (2019). Oceanic Mesoscale Eddy Detection Method Based on Deep Learning. Remote Sensing, 11(16), 1921. https://doi.org/10.3390/rs11161921