Detection of Soil Pipes Using Ground Penetrating Radar


Abstract
1. Introduction
- to identify the lateral and vertical changes of soil pipes,
- to present spatial visualization of GPR profiles, which provides possible distribution and characteristics of soil pipe networks,
- to assess the suitability of GPR application for soil pipe detection.
2. Materials and Methods
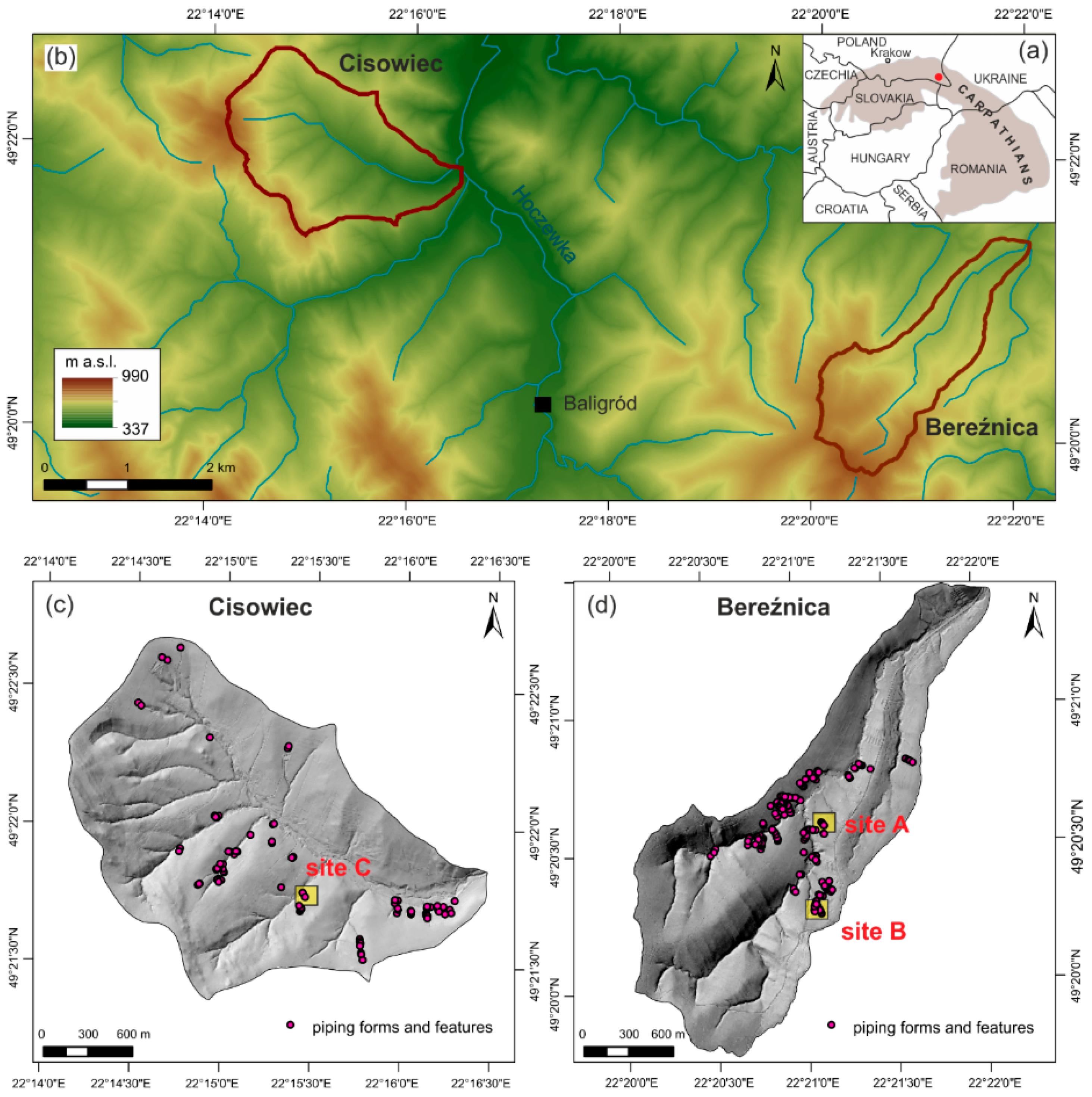
2.1. Study Area
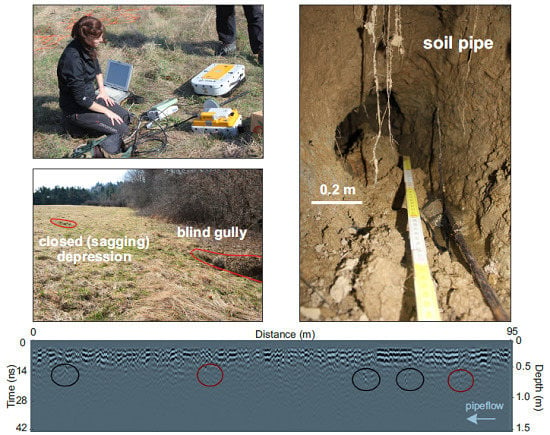
2.2. Field Data Collection
2.2.1. Geomorphological Mapping
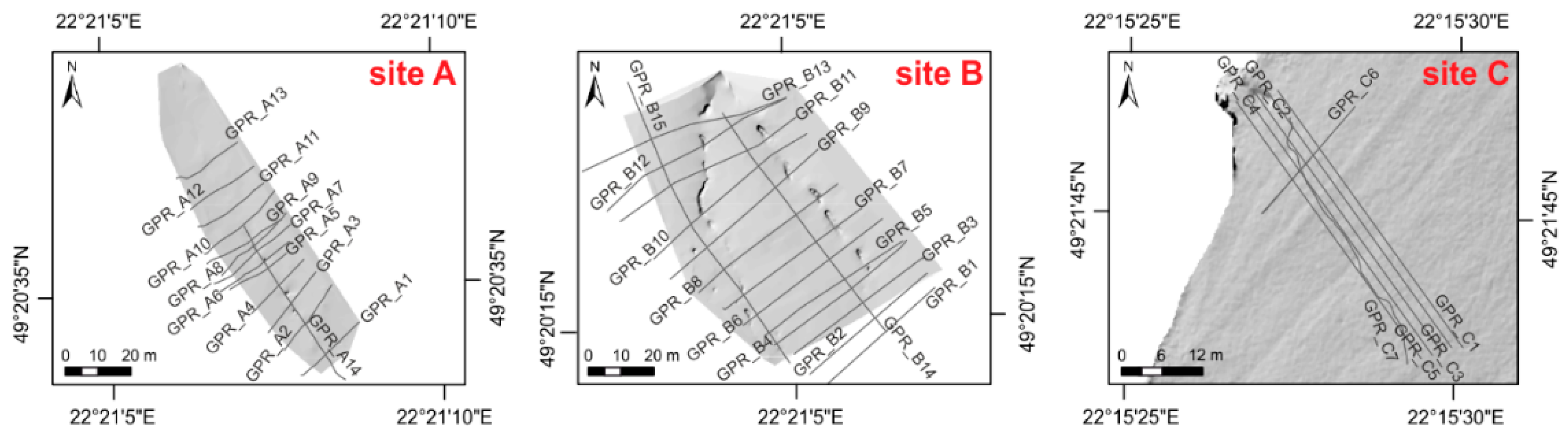
2.2.2. Ground-Penetrating Radar Survey
3. Results
3.1. The Bereźnica Catchment
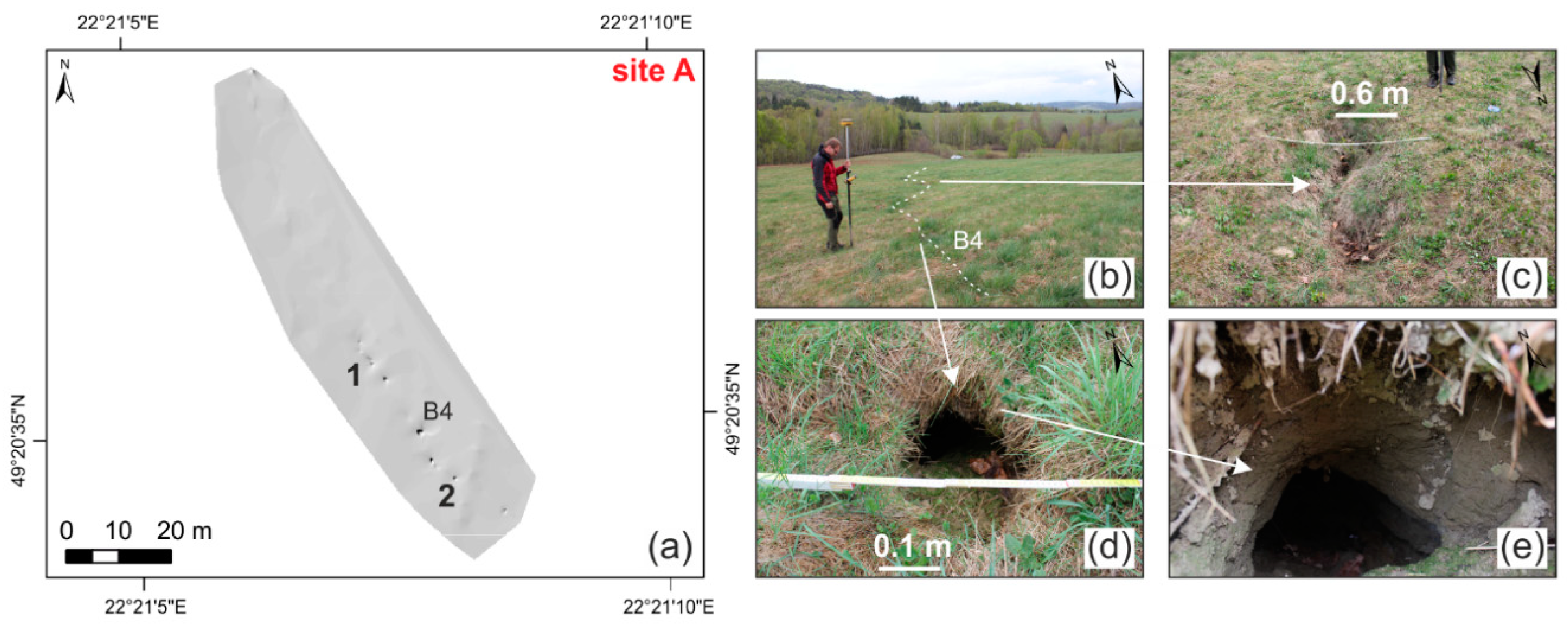
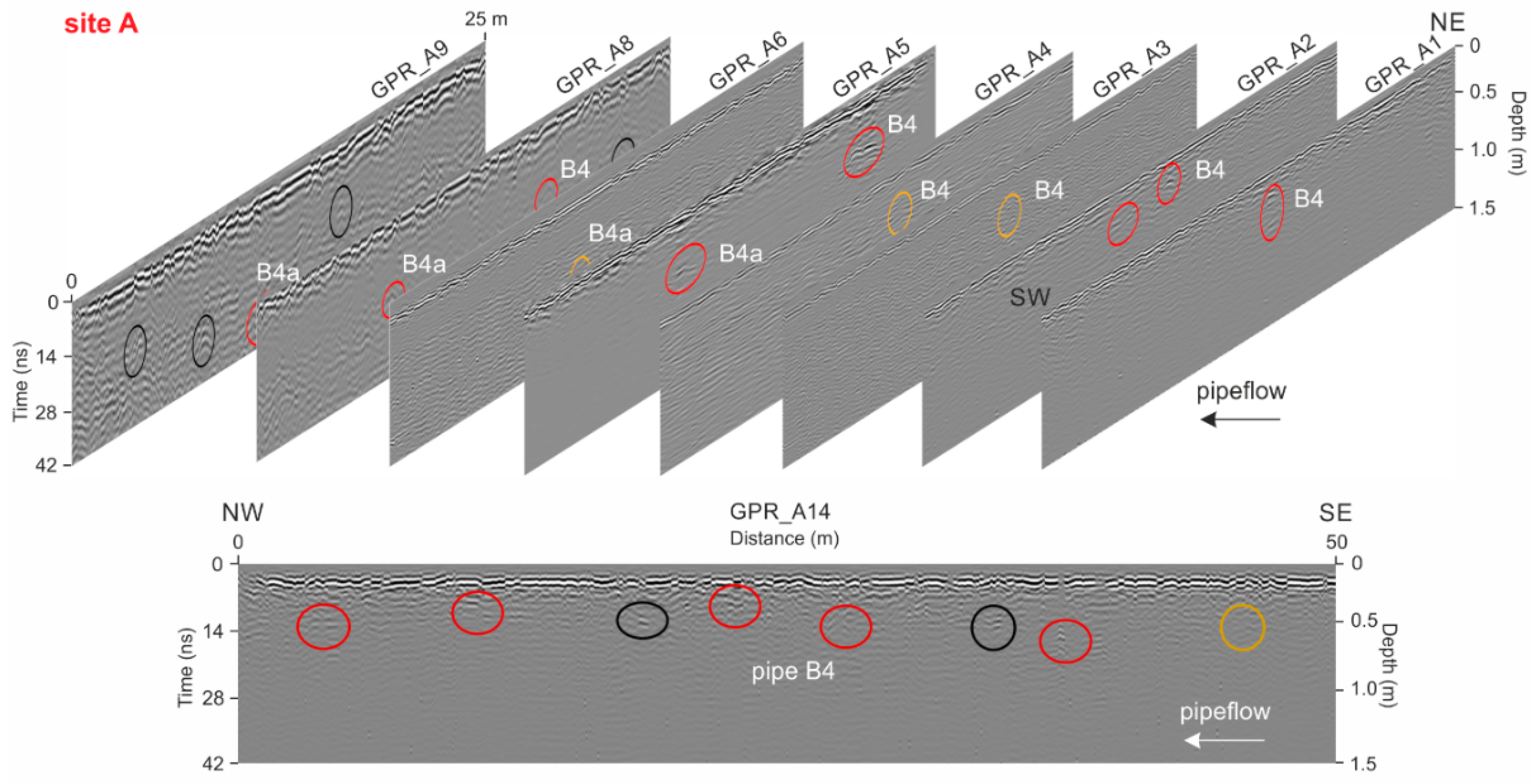
3.1.1. Site A
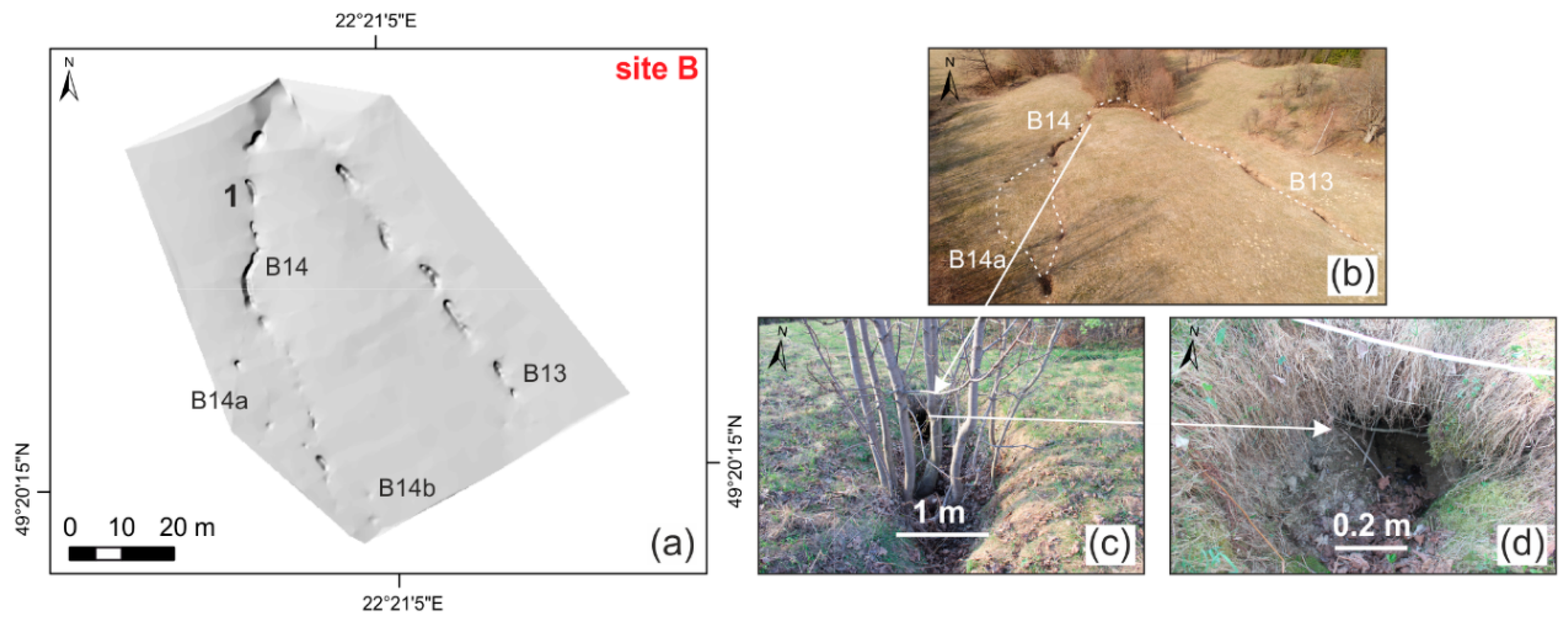
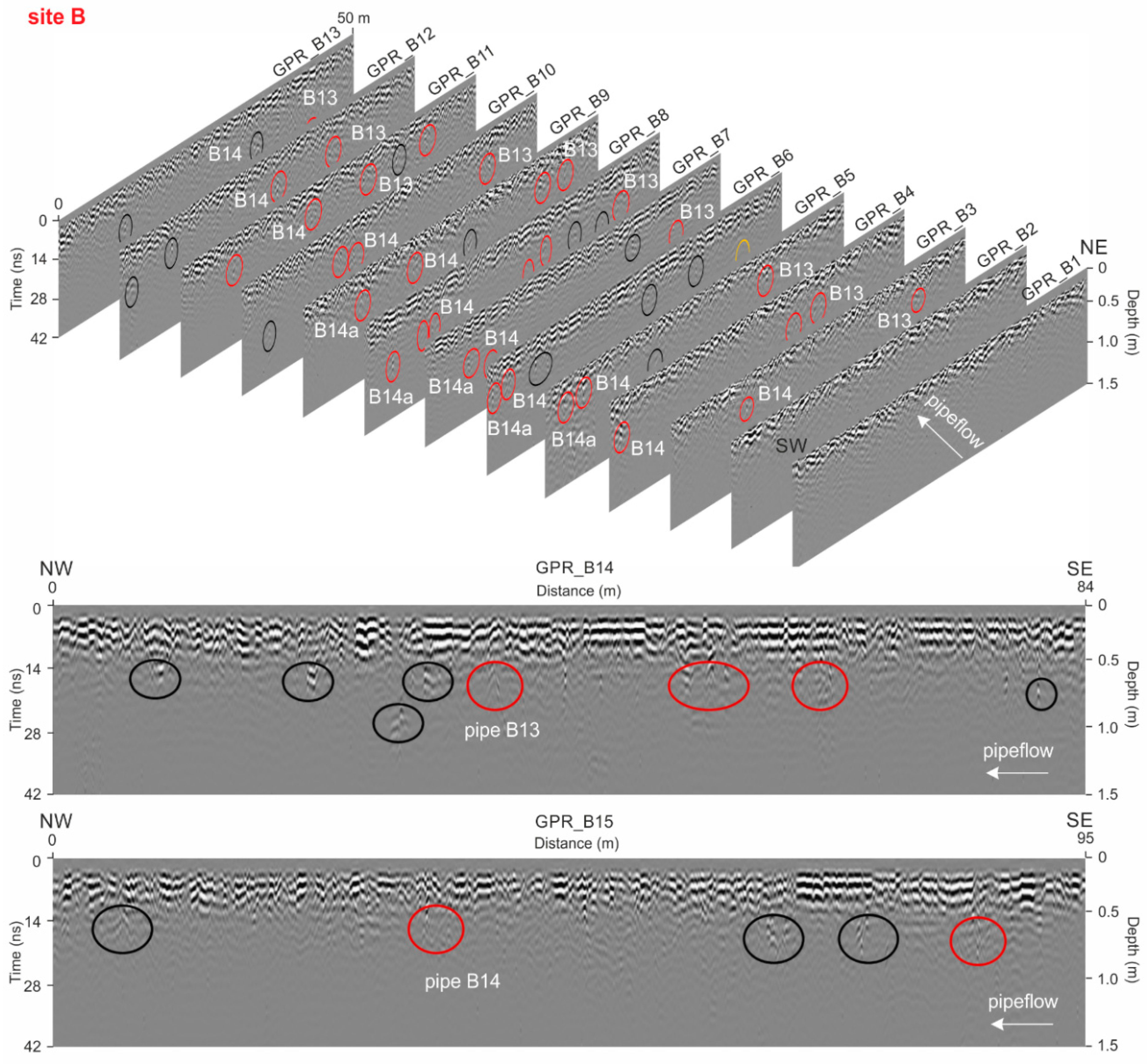
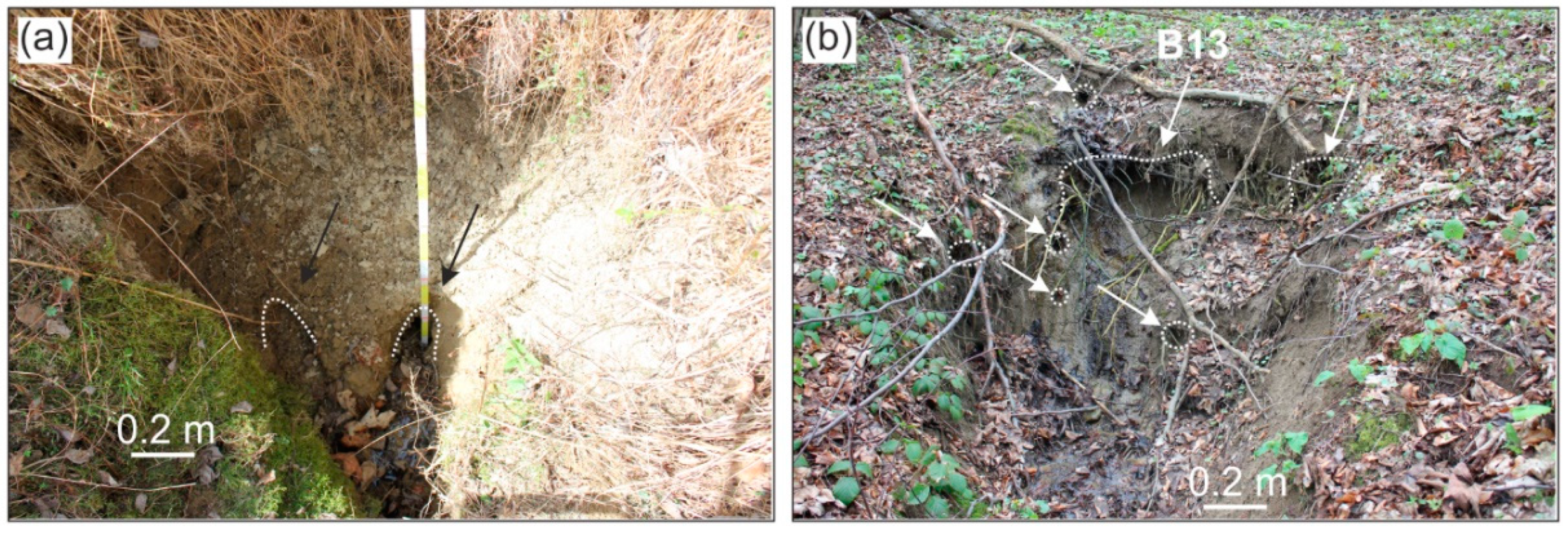
3.1.2. Site B
3.2. The Cisowiec Catchment
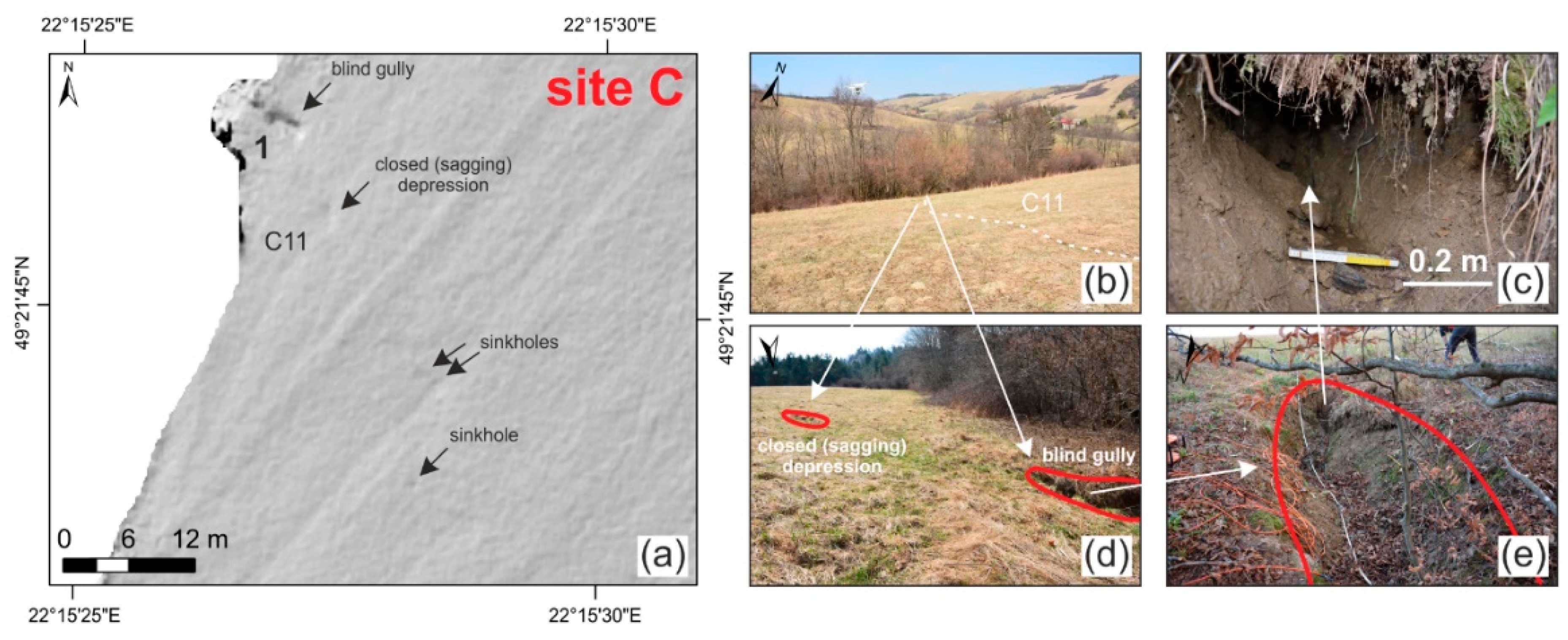
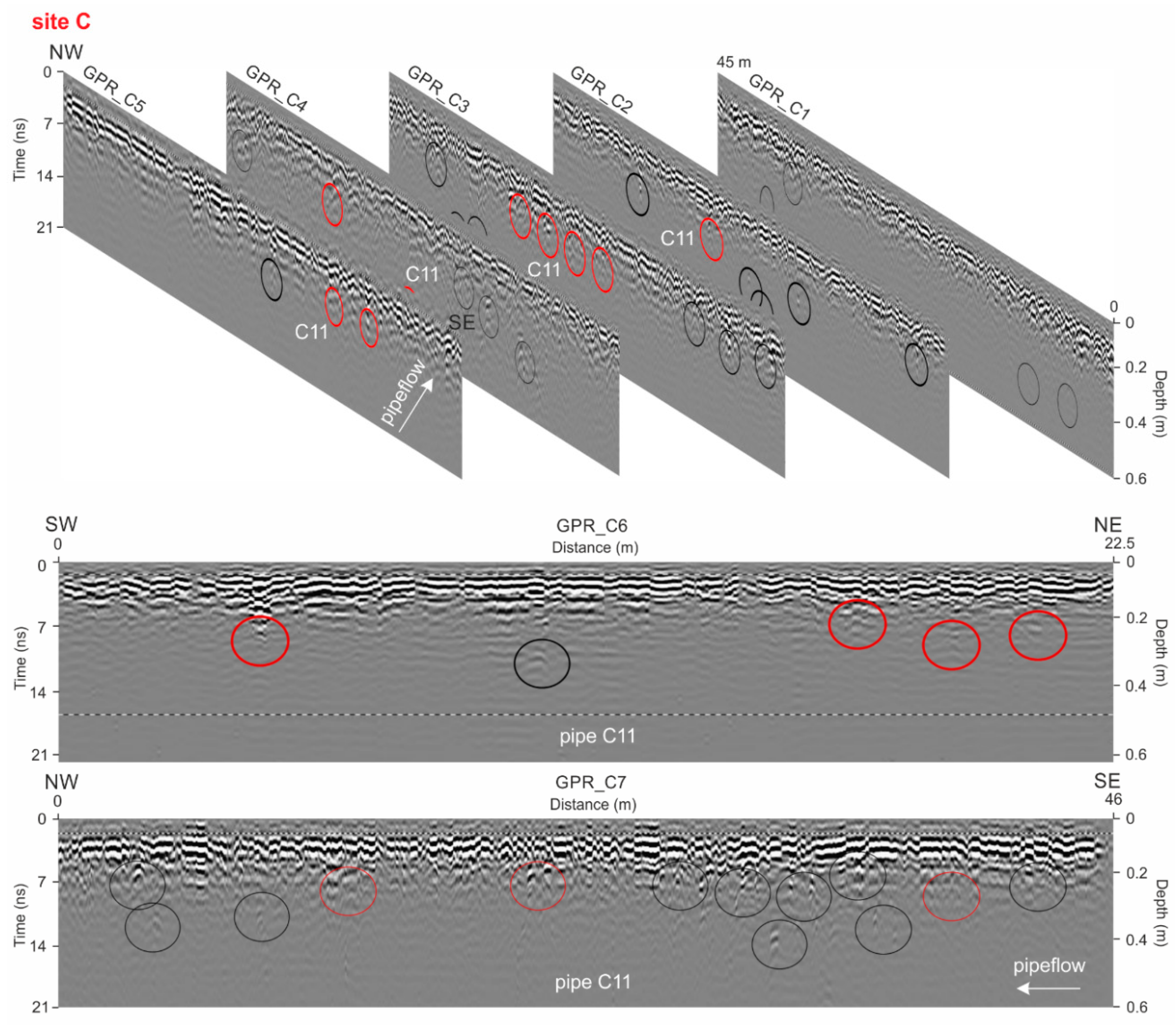
3.2.1. Site C
4. Discussion
4.1. Complexity of the Soil Pipe Network
4.2. Suitability of GPR Application for Soil Pipe Detection
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bernatek-Jakiel, A.; Jakiel, M.; Krzemień, K. Piping dynamics in mid-altitude mountains under a temperate climate: Bieszczady Mts., Eastern Carpathians. Earth Surf. Process. Landf. 2017, 42, 1419–1433. [Google Scholar] [CrossRef]
- Verachtert, E.; Maetens, W.; van den Eeckhaut, M.; Poesen, J.; Deckers, J. Soil loss rates due to piping erosion. Earth Surf. Process. Landf. 2011, 36, 1715–1725. [Google Scholar] [CrossRef]
- Bernatek-Jakiel, A.; Poesen, J. Subsurface erosion by soil piping: Significance and research needs. Earth Sci. Rev. 2018, 185, 1107–1128. [Google Scholar] [CrossRef]
- Jones, J.A.A. Pipe and piping. In Encyclopedia of Geomorphology; Goudie, A.S., Ed.; Routledge: London, UK, 2004; pp. 784–788. [Google Scholar]
- Bernatek, A. The influence of piping on mid-mountain relief: A case study from the Polish Bieszczady Mts. (Eastern Carpathians). Carpathian J. Earth Environ. Sci. 2015, 10, 107–120. [Google Scholar]
- Verachtert, E.; van den Eeckhaut, M.; Poesen, J.; Deckers, J. Factors controlling the spatial distribution of soil piping erosion on loess-derived soils: A case study from central Belgium. Geomorphology 2010, 118, 339–348. [Google Scholar] [CrossRef]
- Holden, J.; Burt, T.P.; Vilas, M. Application of ground-penetrating radar for the identification of subsurface piping in blanket peat. Earth Surf. Process. Landf. 2002, 27, 235–249. [Google Scholar] [CrossRef]
- Bernatek-Jakiel, A.; Kondracka, M. Combining geomorphological mapping and near surface geophysics (GPR and ERT) to study piping systems. Geomorphology 2016, 274, 193–209. [Google Scholar] [CrossRef]
- Jones, J.A.A. Soil piping and its hydrogeomorphic function. Cuaternario y Geomorfolgia 1994, 8, 77–102. [Google Scholar]
- Zhu, T.X. Gully and tunnel erosion in the hilly Loess Plateau region, China. Geomorphology 2012, 153, 144–155. [Google Scholar] [CrossRef]
- Terajima, T.; Sakamoto, T.; Shirai, T. Morphology, structure and flow phases in soil pipes developing in forested hillslopes underlain by a Quaternary sand-gravel formation, Hokkaido, northern main island in Japan. Hydrol. Process. 2000, 14, 713–726. [Google Scholar] [CrossRef]
- Uchida, T.; Tromp-van Meerveld, I.; McDonnell, J.J. The role of lateral pipe flow in hillslope runoff response: An intercomparison of non-linear hillslope response. J. Hydrol. 2005, 311, 117–133. [Google Scholar] [CrossRef]
- Ahmed, S.; Carpenter, P.J. Geophysical response of filled sinkholes, soil pipes, and associated bedrock fractures in thinly mantled karst, east-central Illinois. Environ. Geol. 2003, 44, 705–716. [Google Scholar] [CrossRef]
- Leslie, I.N.; Heinse, R. Characterizing soil–pipe networks with pseudo-three-dimensional resistivity tomography on forested hillslopes with restrictive horizons. Vadose Zo. J. 2013, 12. [Google Scholar] [CrossRef]
- Giampaolo, V.; Capozzoli, L.; Grimaldi, S.; Rizzo, E. Sinkhole risk assessment by ERT: The case study of Sirino Lake (Basilicata, Italy). Geomorphology 2016, 253, 1–9. [Google Scholar] [CrossRef]
- Grellier, S.; Kemp, J.; Janeau, J.L.; Florsch, N.; Ward, D.; Barot, S.; Podwojewski, P.; Lorentz, S.; Valentin, C. The indirect impact of encroaching trees on gully extension: A 64 year study in a sub-humid grassland of South Africa. Catena 2012, 98, 110–119. [Google Scholar] [CrossRef]
- Cardarelli, E.; Cercato, M.; de Donno, G.; di Filippo, G. Detection and imaging of piping sinkholes by integrated geophysical methods. Near Surf. Geophys. 2014, 12, 439–450. [Google Scholar] [CrossRef]
- Got, J.B.; André, P.; Mertens, L.; Bielders, C.; Lambot, S. Soil piping: Networks characterization using ground-penetrating radar. In Proceedings of the 15th International Conference on Ground Penetrating Radar GPR, Brussels, Belgium, 30 June–4 July 2014; pp. 144–148. [Google Scholar]
- Got, J.B.; Bielders, C.; Lambot, S. Characterizing soil piping networks in loess-derived soils using ground-penetrating radar. In Geophysical Research Abstracts; EGU General Assembly: Vienna, Austria, 2019; p. 7038. [Google Scholar]
- Botschek, J.; Maimann, B.; Skowronek, A. Stofftransporte und reliefformung durch tunnelerosion im Bergischen land (Material transport and relief forming by tunnel erosion in Bergisches Land). Zeitschrift für Geomorphologie Supplement Band 2000, 121, 45–61. (In German) [Google Scholar]
- Holden, J. Hydrological connectivity of soil pipes determined by ground-penetrating radar tracer detection. Earth Surf. Process. Landf. 2004, 29, 437–442. [Google Scholar] [CrossRef]
- Holden, J. Sediment and particulate carbon removal by pipe erosion increase over time in blanket peatlands as a consequence of land drainage. J. Geophys. Res. Earth. Surf. 2006, 111, 1–6. [Google Scholar] [CrossRef]
- Lu, Z.; Wilson, G.V. Acoustic measurements of soil pipe flow and internal erosion. Soil Sci. Soc. Am. J. 2012, 76, 853–866. [Google Scholar] [CrossRef]
- Haczewski, G.; Kukulak, J.; Bąk, K. Budowa Geologiczna i Rzeźba Bieszczadzkiego Parku Narodowego (Geology and Geomorphology of Bieszczady National Park); Wydawnictwo Naukowe Uniwersytetu Pedagogicznego: Krakow, Poland, 2007; pp. 1–160. (In Polish) [Google Scholar]
- Kacprzak, A.; Szymański, W.; Wójcik-Tabol, P. The role of flysch sandstones in forming the properties of cover deposits and soils—Examples from the Carpathians. Zeitschrift für Geomorphologie 2015, 59 (Suppl. 1), 227–245. [Google Scholar] [CrossRef]
- Bernatek-Jakiel, A.; Kacprzak, A.; Stolarczyk, M. Impact of soil characteristics on piping activity in a mountainous area under a temperate climate (Bieszczady Mts., Eastern Carpathians). Catena 2016, 141, 117–129. [Google Scholar] [CrossRef]
- Annan, A.P. Ground Penetrating Radar. Principles, Procedures & Applications; Sensors & Software Inc.: Mississauga, ON, Canada, 2003; pp. 1–278. [Google Scholar]
- Doolittle, J.A.; Collins, M.E. Use of soil information to determine application of ground penetrating radar. J. Appl. Geophys. 1995, 33, 101–108. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar: Theory and Applications, 1st ed.; Elsevier, B.V.: Amsterdam, The Netherlands, 2009; pp. 1–509. [Google Scholar]
- Robinson, M.; Bristow, C.; McKinley, J.; Ruffell, A. Ground penetrating radar. In Geomorphological Techniques; Cook, S.J., Clarke, L.E., Nield, J.M., Eds.; British Society for Geomorphology: London, UK, 2013; Part 1, Section 5.5; pp. 1–26. [Google Scholar]
- Zhang, T.; Wilson, G.V. Spatial distribution of pipe collapses in Goodwin Creek Watershed, Mississippi. Hydrol. Process. 2013, 27, 2032–2040. [Google Scholar] [CrossRef]
- Zhu, T.X. Tunnel development over a 12 year period in a semi-arid catchment of the Loess Plateau, China. Earth Surf. Process. Landf. 2003, 28, 507–525. [Google Scholar] [CrossRef]
- Jones, J.A.A. Soil piping and catchment response. Hydrol. Process. 2010, 24, 1548–1566. [Google Scholar] [CrossRef]
- Bernatek-Jakiel, A.; Wrońska-Wałach, D. Impact of piping on gully development in mid-altitude mountains under a temperate climate: A dendrogeomorphological approach. Catena 2018, 165, 320–332. [Google Scholar] [CrossRef]
- Nichols, M.H.; Nearing, M.A.; Hernandez, M.; Polyakov, V.O. Monitoring channel head erosion processes in response to an artificially induced abrupt base level change using time-lapse photography. Geomorphology 2016, 265, 107–116. [Google Scholar] [CrossRef]
- Vanmaercke, M.; Poesen, J.; van Mele, B.; Demuzere, M.; Bruynseels, A.; Golosov, V.; Bezerra, J.F.R.; Bolysov, S.; Dvinskih, A.; Frankl, A. How fast do gully headcuts retreat? Earth Sci. Rev. 2016, 154, 336–355. [Google Scholar] [CrossRef]
- Li, Z.; Fang, H. Impacts of climate change on water erosion: A review. Earth Sci. Rev. 2016, 163, 94–117. [Google Scholar] [CrossRef]
- Davis, J.L.; Annan, A.P. Ground-penetrating radar for high-resolution mapping of soil and rock stratigraphy. Geophys. Prospect. 1989, 37, 531–551. [Google Scholar] [CrossRef]
- Van Dam, R.L. Causes of Ground-Penetrating Radar Reflections in Sediment. Ph.D. Thesis, Vrije Universiteit, Amsterdam, The Netherlands, 2001. [Google Scholar]
- Bristow, C.S. Ground penetrating radar in aeolian dune sands. In Ground Penetrating Radar: Theory and Applications; Jol, H.M., Ed.; Elsevier Science: Amsterdam, The Netherlands, 2009; pp. 273–297. [Google Scholar]
- Sevil, J.; Gutiérrez, F.; Zarroca, M.; Desir, G.; Carbonel, D.; Guerrero, J.; Linares, R.; Roqué, C.; Fabregat, I. Sinkhole investigation in an urban area by trenching in combination with GPR, ERT and high-precision leveling. Mantled evaporite karst of Zaragoza city, NE Spain. Eng. Geol. 2017, 231, 9–20. [Google Scholar] [CrossRef]
- Fedeli, A.; Pastorino, M.; Randazzo, A. Advanced inversion techniques for ground penetrating radar. J. Telecommun. Inf. Technol. 2017, 3, 37–42. [Google Scholar] [CrossRef]
- Persico, R. Introduction to Ground Penetrating Radar: Inverse Scattering and Data Processing; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Gou, L.; Chen, J.; Lin, H. Subsurface lateral preferential flow network revealed by time-lapse ground-penetrating radar in a hillslope. Water Resour. Res. 2014, 50, 9127–9147. [Google Scholar] [CrossRef]
- Wilson, G.V. Mechanisms of ephemeral gully erosion caused by constant flow through a continuous soil-pipe. Earth Surf. Process. Landf. 2009, 34, 1858–1866. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Catchment | Study Site | Area of Study Site (m2) | GPR Antennas | Depth of Radargrams (m) | Number and Length of Radargrams | |
|---|---|---|---|---|---|---|
| Longitudinal | Transverse | |||||
| Bereźnica | A | 1900 | 500 MHz | 3.2 | 1 (57 m) | 13 (22–30 m) |
| Bereźnica | B | 5800 | 500 MHz | 3.2 | 2 (84–95 m) | 13 (45–60 m) |
| Cisowiec | C | 850 | 800 MHz | 2.0 | 5 (45 m) | 1 (22.5 m) |
| Parameters | Dry Clayey Soils | Wet Clayey Soils | Unsaturated Silt | Saturated Silt | ||||
|---|---|---|---|---|---|---|---|---|
| Wave velocity (m ns−1) | 0.1897 | 0.0707 | 0.105 | 0.06 | ||||
| Dielectric constant ε | 2.5 | 18 | 3.8 | 26 | ||||
| Frequency (MHz) | λ (m) | R (m) | λ (m) | R (m) | λ (m) | R (m) | λ (m) | R (m) |
| 100 | 1.90 | 0.47 | 0.71 | 0.18 | 1.05 | 0.26 | 0.60 | 0.15 |
| 250 | 0.76 | 0.19 | 0.28 | 0.07 | 0.42 | 0.11 | 0.24 | 0.06 |
| 500 | 0.38 | 0.095 | 0.14 | 0.035 | 0.21 | 0.053 | 0.12 | 0.030 |
| 800 | 0.24 | 0.059 | 0.09 | 0.022 | 0.13 | 0.033 | 0.08 | 0.019 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bernatek-Jakiel, A.; Kondracka, M. Detection of Soil Pipes Using Ground Penetrating Radar. Remote Sens. 2019, 11, 1864. https://doi.org/10.3390/rs11161864
Bernatek-Jakiel A, Kondracka M. Detection of Soil Pipes Using Ground Penetrating Radar. Remote Sensing. 2019; 11(16):1864. https://doi.org/10.3390/rs11161864
Chicago/Turabian StyleBernatek-Jakiel, Anita, and Marta Kondracka. 2019. "Detection of Soil Pipes Using Ground Penetrating Radar" Remote Sensing 11, no. 16: 1864. https://doi.org/10.3390/rs11161864
APA StyleBernatek-Jakiel, A., & Kondracka, M. (2019). Detection of Soil Pipes Using Ground Penetrating Radar. Remote Sensing, 11(16), 1864. https://doi.org/10.3390/rs11161864