An Efficient In-Situ Debris Flow Monitoring System over a Wireless Accelerometer Network

 , ,
, ,
Abstract
1. Introduction
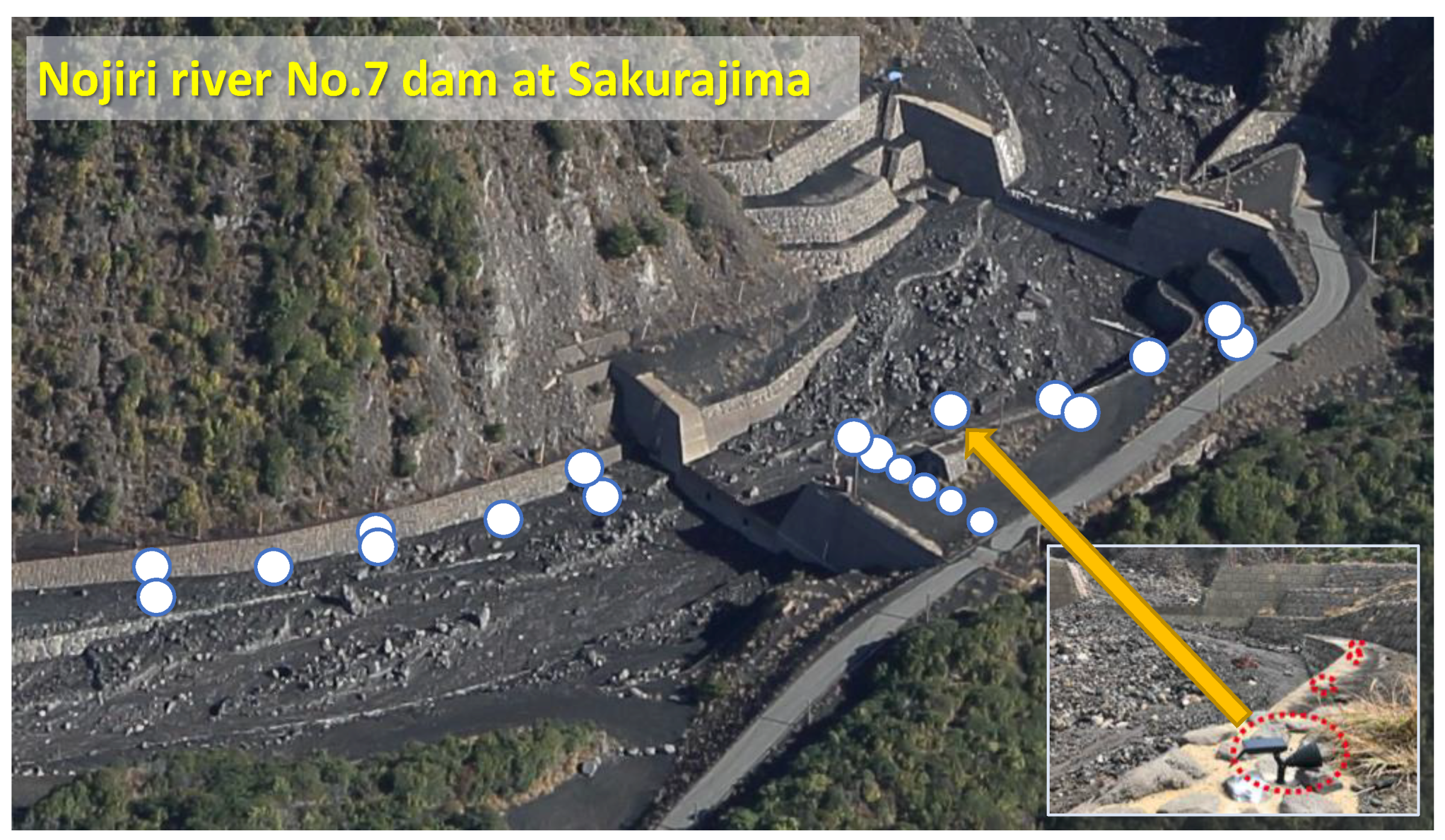
2. Overview of the Study Area
3. Materials and Methods
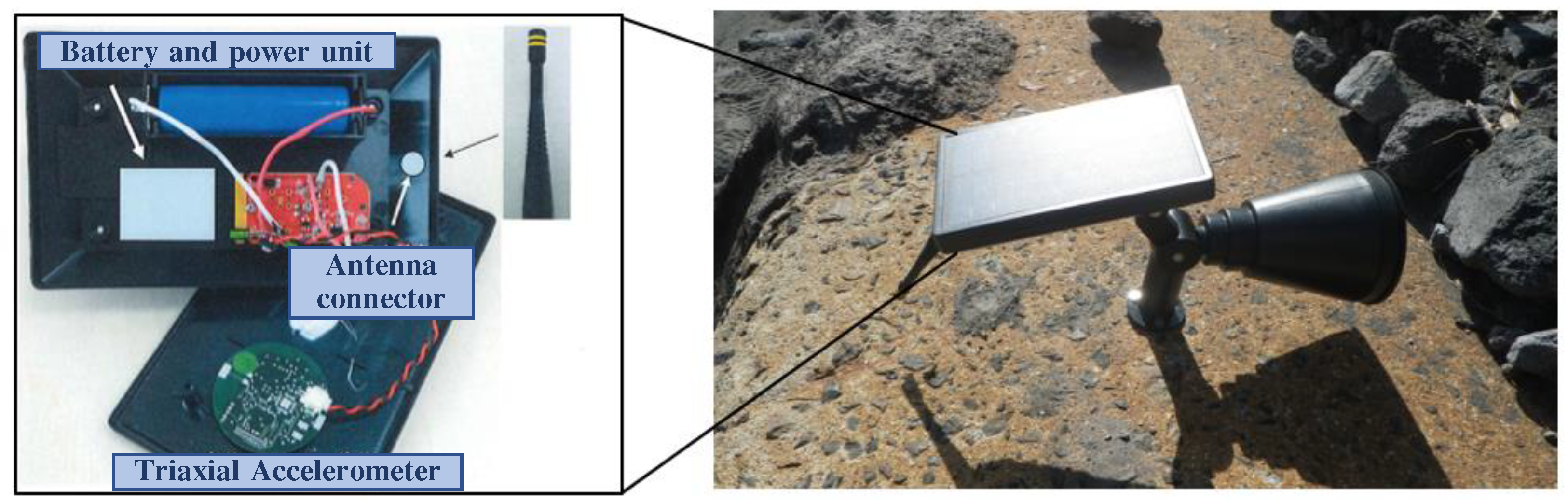
3.1. Design and Implementation of the Debris Flow Monitoring System Hardware
3.1.1. Triaxial Accelerometer Sensing Unit
3.1.2. Sensor Deployment Map
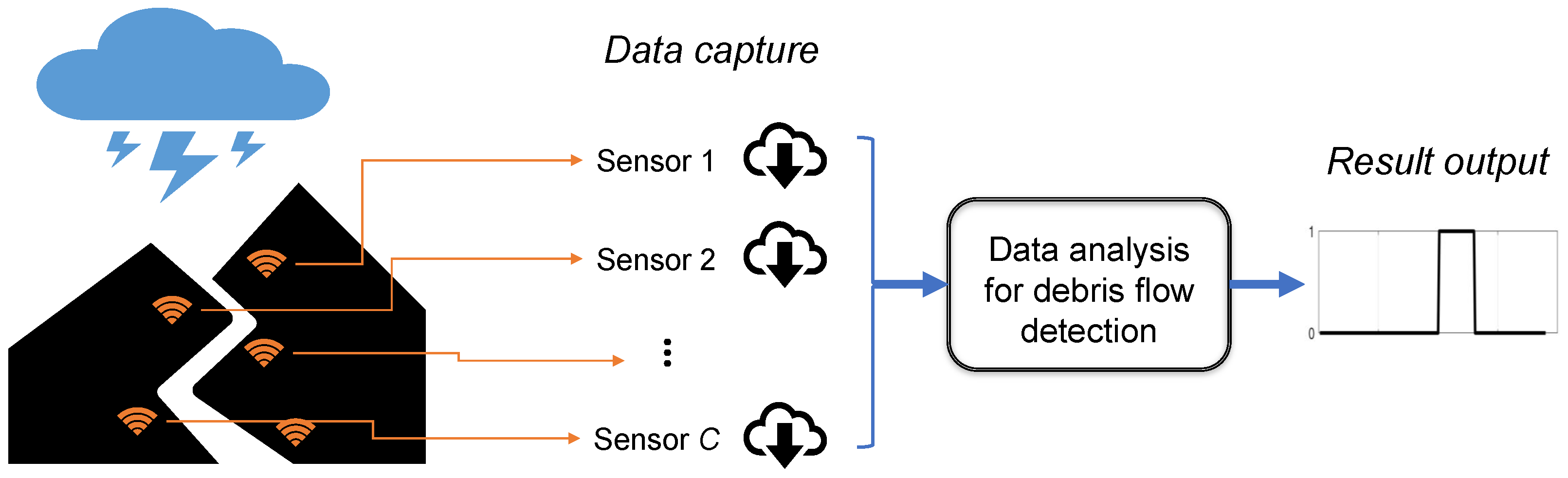
3.2. The Proposed Debris Flow Detection Algorithm
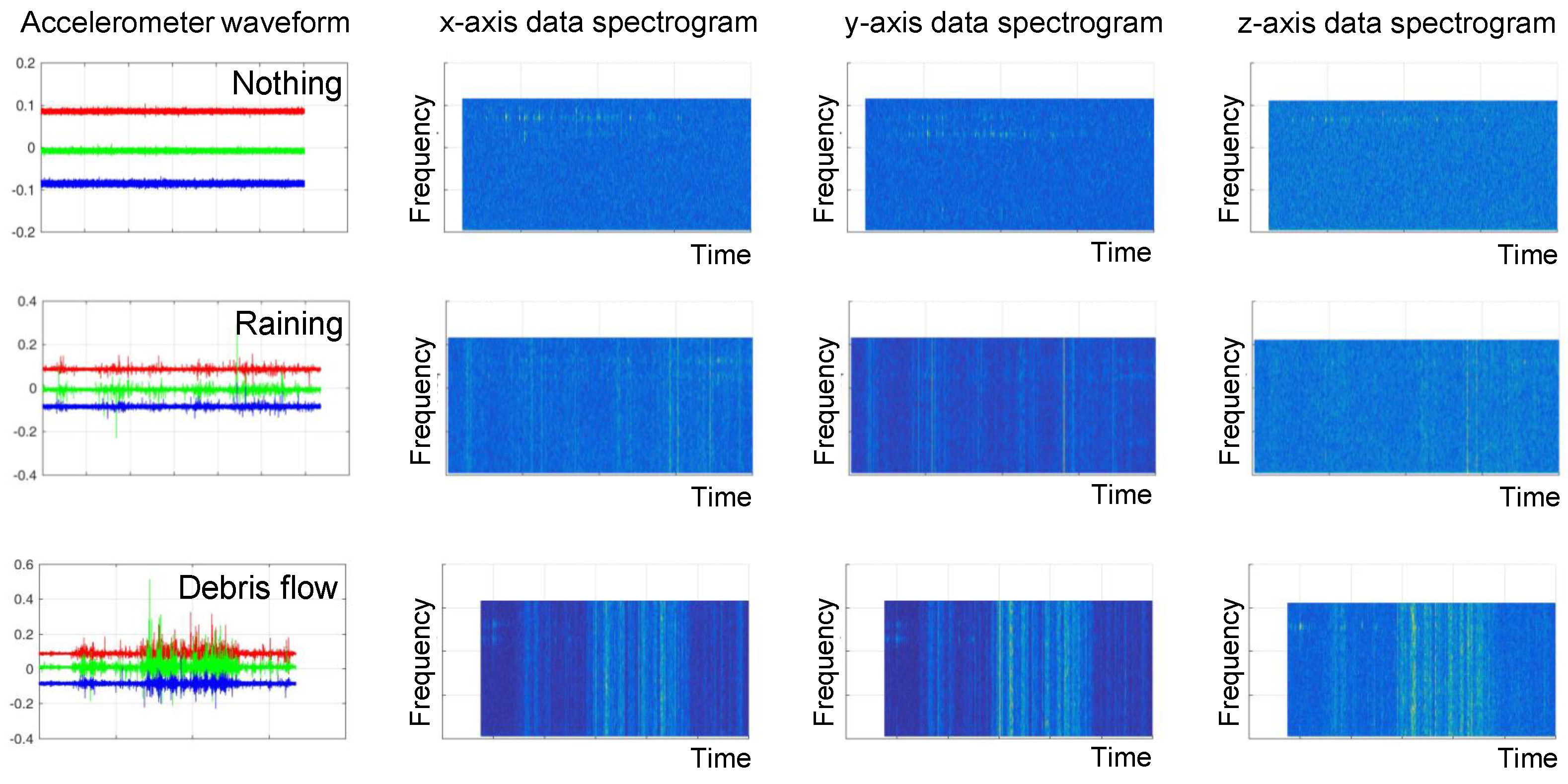
3.2.1. Feature Extraction from Accelerometer Data
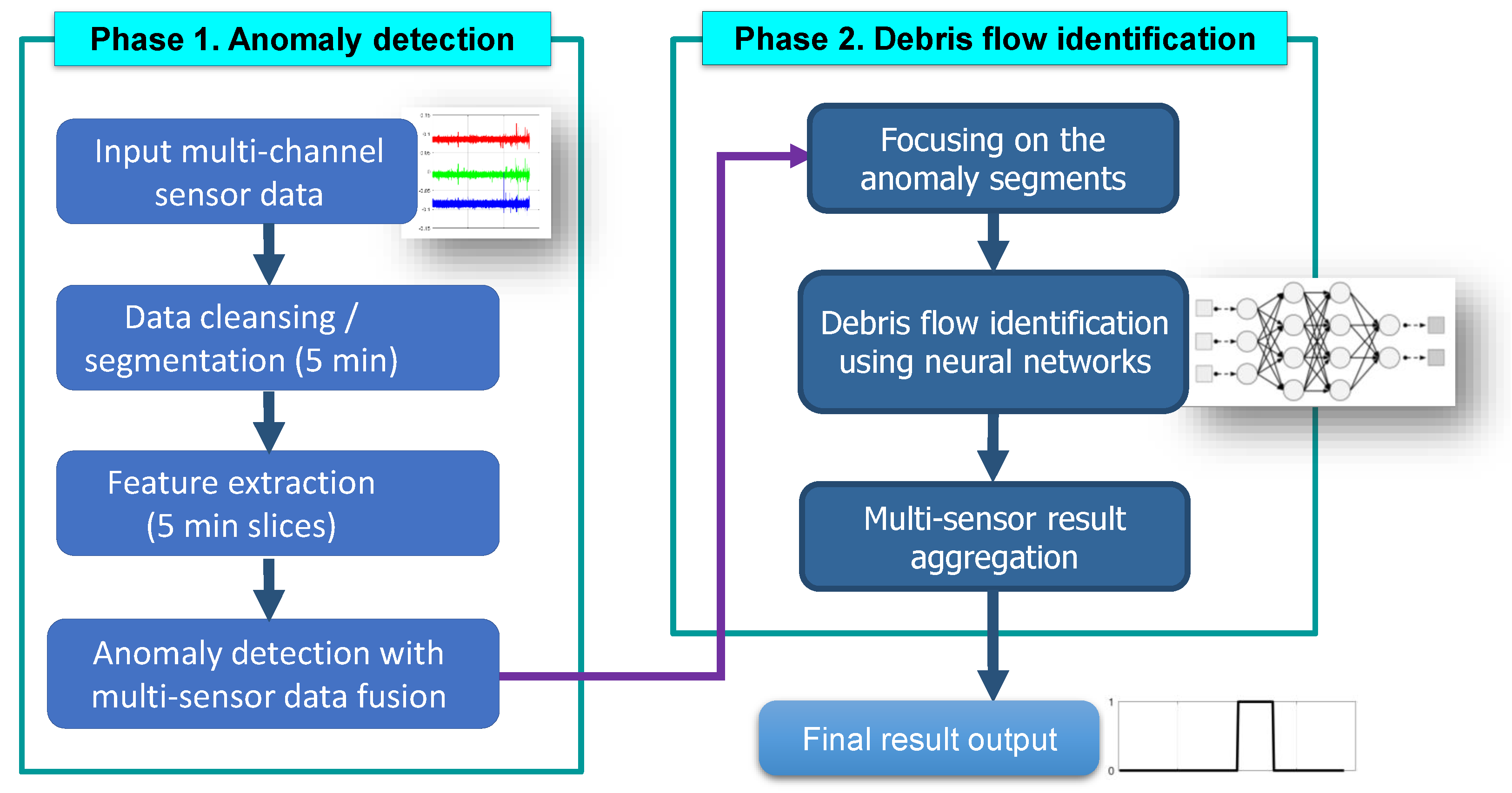
3.2.2. Data Analysis Phase 1: Anomaly Detection
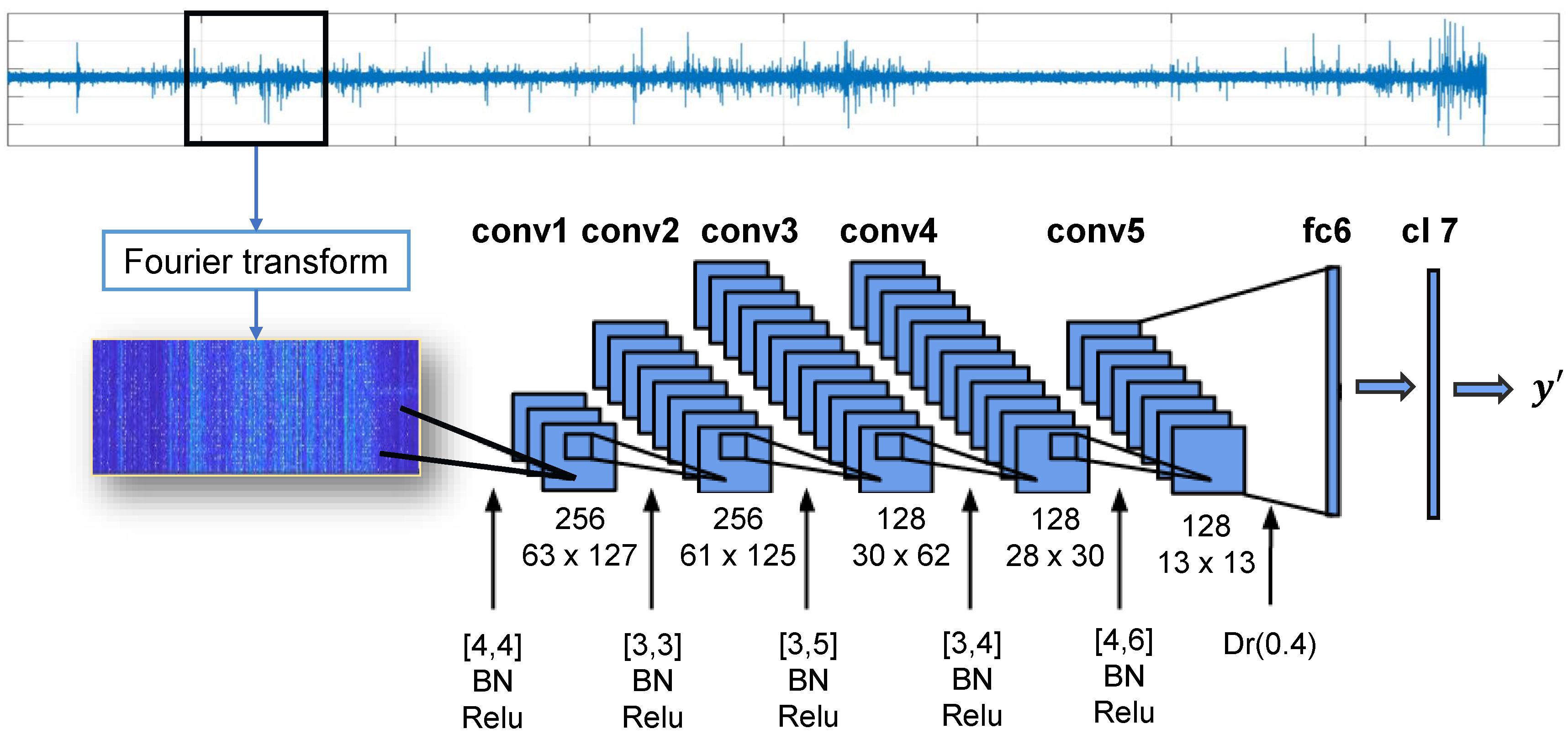
3.2.3. Data Analysis Phase 2: Debris Flow Identification
| Algorithm 1 Neural Network Training with back propagation |
|
3.2.4. Efficient Sensor Fusion Scheme
4. Results
4.1. Data Collection and System Settings
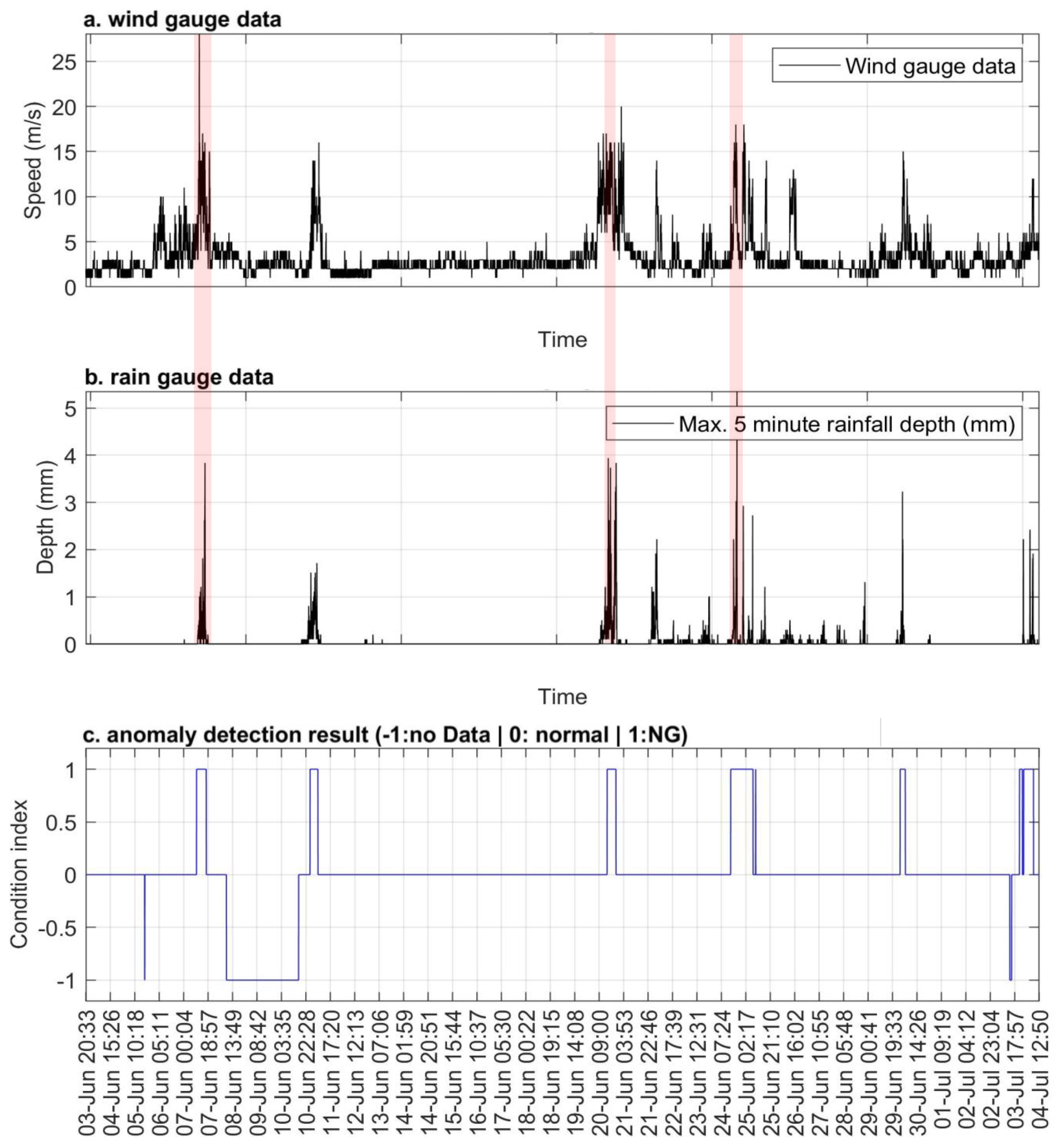
4.2. Anomaly Detection Result
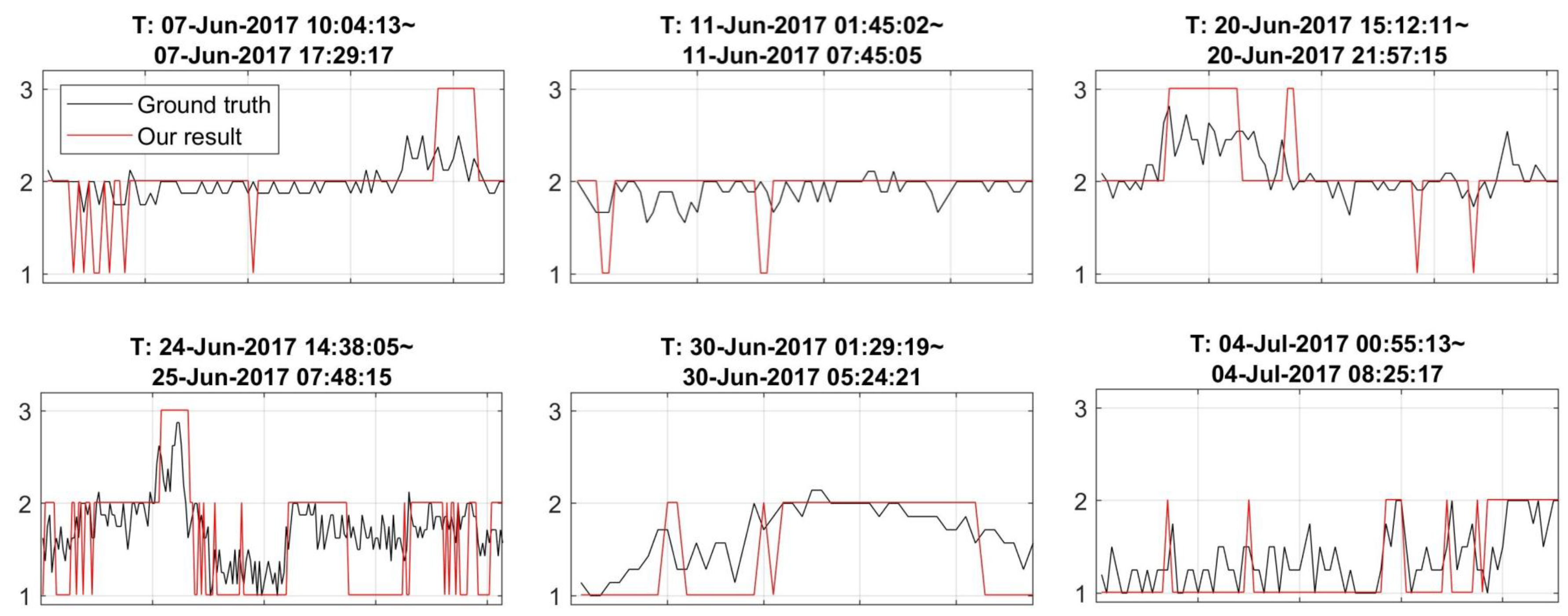
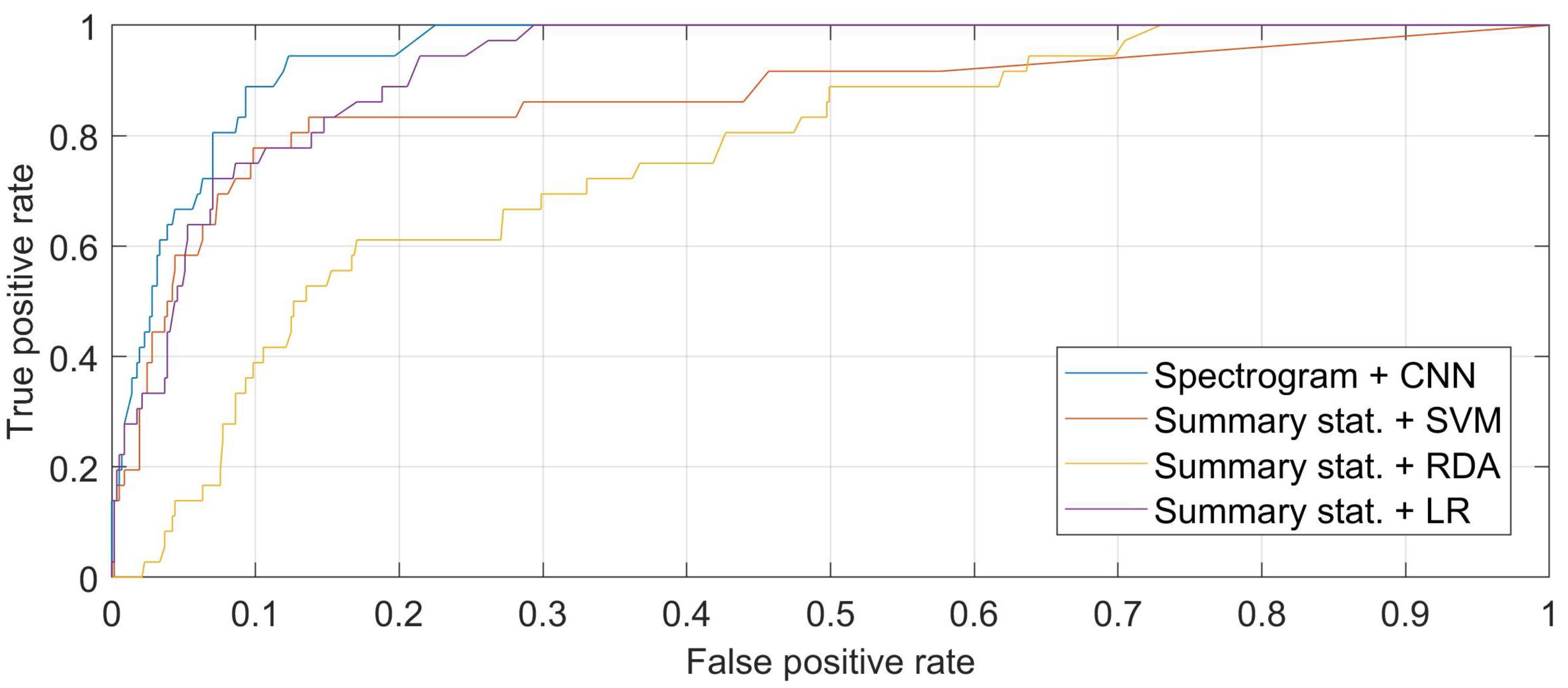
4.3. Debris Flow Identification Performance
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Coussot, P.; Meunier, M. Recognition, classification and mechanical description of debris flows. Earth Sci. Rev. 1996, 40, 209–227. [Google Scholar] [CrossRef]
- Hungr, O.; Evans, S.G.; Hutchinson, I.N. A Review of the Classification of Landslides of the Flow Type. Environ. Eng. Geosci. 2001, 7, 221–238. [Google Scholar] [CrossRef]
- Takahashi, T. A review of Japanese debris flow research. Int. J. Eros. Control Eng. 2009, 2, 1–4. [Google Scholar] [CrossRef]
- Landslide Disaster Cases in Recent Years. Available online: http://www.mlit.go.jp/mizukokudo/sabo/jirei.html (accessed on 15 August 2018).
- Takeshi, T. Evolution of debris-flow monitoring methods on Sakurajima. Int. J. Erosion Control Eng. 2011, 4, 21–31. [Google Scholar] [CrossRef]
- Marra, F.; Destro, E.; Nikolopoulos, E.I.; Zoccatelli, D.; Creutin, J.D.; Guzzetti, F.; Borga, M. Impact of rainfall spatial aggregation on the identification of debris flow occurrence thresholds. Hydrol. Earth Syst. Sci. 2017, 21, 4525–4532. [Google Scholar] [CrossRef]
- Lee, H.C.; Banerjee, A.; Fang, Y.M.; Lee, B.J.; King, C.T. Design of a Multifunctional Wireless Sensor for In-Situ Monitoring of Debris Flows. IEEE Trans. Instrum. Meas. 2010, 59, 2958–2967. [Google Scholar] [CrossRef]
- Baum, R.L.; Godt, J.W. Early warning of rainfall-induced shallow landslides and debris flows in the USA. Landslides 2010, 7, 259–272. [Google Scholar] [CrossRef]
- Huang, C.J.; Yin, H.Y.; Chen, C.Y.; Yeh, C.H.; Wang, C.L. Ground vibrations produced by rock motions and debris flows. J. Geophys. Res. Earth Surf. 2007, 112, F02014. [Google Scholar] [CrossRef]
- Berti, M.; Genevois, R.; LaHusen, R.; Simoni, A.; Tecca, P.R. Debris flow monitoring in the Acquabona watershed on the Dolomites (Italian Alps). Phys. Chem. Earth Part B Hydrol. Oceans Atmos. 2000, 25, 707–715. [Google Scholar] [CrossRef]
- Arattano, M.; Marchi, L. Systems and sensors for debris-flow monitoring and warning. Sensors 2008, 8, 2436–2452. [Google Scholar] [CrossRef]
- De la Piedra, A.; Benitez-Capistros, F.; Dominguez, F.; Touhafi, A. Wireless sensor networks for environmental research: A survey on limitations and challenges. In Proceedings of the Eurocon 2013, Zagreb, Croatia, 1–4 July 2013; pp. 267–274. [Google Scholar]
- Alamdar, F.; Kalantari, M.; Rajabifard, A. Towards multi-agency sensor information integration for disaster management. Comput. Environ. Urban Syst. 2016, 56, 68–85. [Google Scholar] [CrossRef]
- Schimmel, A.; Hübl, J. Automatic detection of debris flows and debris floods based on a combination of infrasound and seismic signals. Landslides 2016, 13, 1181–1196. [Google Scholar] [CrossRef]
- Erdaş, Ç.B.; Atasoy, I.; Açıcı, K.; Oğul, H. Integrating features for accelerometer-based activity recognition. Procedia Comput. Sci. 2016, 98, 522–527. [Google Scholar] [CrossRef]
- Zheng, A.; Amanda, C. Feature Engineering for Machine Learning: Principles and Techniques for Data Scientists; O’Reilly Media, Inc.: Newton, MA, USA, 2018. [Google Scholar]
- Wan, S.; Lei, T.C. A knowledge-based decision support system to analyze the debris-flow problems at Chen-Yu-Lan River, Taiwan. Knowl.-Based Syst. 2009, 22, 580–588. [Google Scholar] [CrossRef]
- Kern, A.N.; Addison, P.; Oommen, T.; Salazar, S.E.; Coffman, R.A. Machine learning based predictive modeling of debris flow probability following wildfire in the intermountain Western United States. Math. Geosci. 2017, 49, 717–735. [Google Scholar] [CrossRef]
- Dou, J.; Yamagishi, H.; Pourghasemi, H.R.; Yunus, A.P.; Song, X.; Xu, Y.; Zhu, Z. An integrated artificial neural network model for the landslide susceptibility assessment of Osado Island, Japan. Nat. Hazards 2015, 78, 1749–1776. [Google Scholar] [CrossRef]
- Pham, B.T.; Pradhan, B.; Bui, D.T.; Prakash, I.; Dholakia, M.B. A comparative study of different machine learning methods for landslide susceptibility assessment: A case study of Uttarakhand area (India). Environ. Model. Softw. 2016, 84, 240–250. [Google Scholar] [CrossRef]
- Amini, N.; Sarrafzadeh, M.; Vahdatpour, A.; Xu, W. Accelerometer-based on-body sensor localization for health and medical monitoring applications. Pervasive Mob. Comput. 2011, 7, 746–760. [Google Scholar] [CrossRef] [PubMed]
- Lee, W.H.; Lee, R.B. Multi-sensor authentication to improve smartphone security. In Proceedings of the 2015 International Conference on Information Systems Security and Privacy (ICISSP), Angers, France, 9–11 February 2015. [Google Scholar]
- Yaseen, Z.M.; Allawi, M.F.; Yousif, A.A.; Jaafar, O.; Hamzah, F.M.; El-Shafie, A. Non-tuned machine learning approach for hydrological time series forecasting. Neural Comput. Appl. 2016, 30, 1479–1491. [Google Scholar] [CrossRef]
- Li, W.; Ni, L.; Li, Z.L.; Duan, S.B.; Wu, H. Evaluation of Machine Learning Algorithms in Spatial Downscaling of MODIS Land Surface Temperature. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019. [Google Scholar] [CrossRef]
- Murphy, K.P. Machine Learning: A Probabilistic Perspective; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- González, S.; Sedano, J.; Villar, J.R.; Corchado, E.; Herrero, Á.; Baruque, B. Features and models for human activity recognition. Neurocomputing 2015, 167, 52–60. [Google Scholar] [CrossRef]
- Machado, I.P.; Gomes, A.L.; Gamboa, H.; Paixão, V.; Costa, R.M. Human activity data discovery from triaxial accelerometer sensor: Non-supervised learning sensitivity to feature extraction parametrization. Inf. Process. Manag. 2015, 51, 204–214. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin, Germany, 2006. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Nweke, H.F.; Teh, Y.W.; Al-Garadi, M.A.; Alo, U.R. Deep learning algorithms for human activity recognition using mobile and wearable sensor networks: State of the art and research challenges. Expert Syst. Appl. 2018, 105, 233–261. [Google Scholar] [CrossRef]
- López, V.; Fernández, A.; Moreno-Torres, J.G.; Herrera, F. Analysis of preprocessing vs. cost-sensitive learning for imbalanced classification. Open problems on intrinsic data characteristics. Expert Syst. Appl. 2012, 39, 6585–6608. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer Features for Debris Flow Monitoring | ||
|---|---|---|
| Feature Type | Feature Name | Description |
| Time domain | 1. Root mean square (RMS) | |
| 2. Mean absolute deviation (MAD) | ||
| 3. Interquartile range (IQR) | Descriptive statistics as the difference between 75th and 25th percentiles | |
| 4. Tilt of the sensor | ||
| 5. Tilt ratio (TR) of the sensor | ||
| 6. Magnitude area (MA) | ||
| 7. Motion intensity (MI) | ||
| 8. Maxima/Minima (M2M) | M2M = | |
| 9. Binned distribution (BD) | For input data, first calculate the range (R) as maximum–minimium; then, R is divided into 15 equal size bins which records the fraction of data values falls in. | |
| 10. Zero cross rate (ZCR) | Zero-crossing count of the waveform | |
| 11. Cross-axes correlation (CC) | Calculated for each pair of axes as the ratio of the covariance and the product of the standard deviations. | |
| 12. Descriptive statistics | entropy, skewness and kurtosis | |
| Spectral domain | 13. Average band power (ABP) | Compute time-average of spectrogram of data |
| 14. Band standard deviation (BSD) | Compute standard deviation of each band along within observation window | |
| Case | Start Time | End Time2 |
|---|---|---|
| 1 | 7 Jun 2017 16:21:00 | 7 Jun 2017 17:00:00 |
| 2 | 20 Jun 2017 16:35:00 | 20 Jun 2017 18:05:00 |
| 3 | 24 Jun 2017 19:03:01 | 24 Jun 2017 20:05:00 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, J.; Kurashima, Y.; Kobayashi, T.; Tsuda, H.; Takahara, T.; Sakurai, W. An Efficient In-Situ Debris Flow Monitoring System over a Wireless Accelerometer Network. Remote Sens. 2019, 11, 1512. https://doi.org/10.3390/rs11131512
Ye J, Kurashima Y, Kobayashi T, Tsuda H, Takahara T, Sakurai W. An Efficient In-Situ Debris Flow Monitoring System over a Wireless Accelerometer Network. Remote Sensing. 2019; 11(13):1512. https://doi.org/10.3390/rs11131512
Chicago/Turabian StyleYe, Jiaxing, Yuichi Kurashima, Takeshi Kobayashi, Hiroshi Tsuda, Teruyoshi Takahara, and Wataru Sakurai. 2019. "An Efficient In-Situ Debris Flow Monitoring System over a Wireless Accelerometer Network" Remote Sensing 11, no. 13: 1512. https://doi.org/10.3390/rs11131512
APA StyleYe, J., Kurashima, Y., Kobayashi, T., Tsuda, H., Takahara, T., & Sakurai, W. (2019). An Efficient In-Situ Debris Flow Monitoring System over a Wireless Accelerometer Network. Remote Sensing, 11(13), 1512. https://doi.org/10.3390/rs11131512