The Pan-and-Tilt Hyperspectral Radiometer System (PANTHYR) for Autonomous Satellite Validation Measurements—Prototype Design and Testing


Abstract
:1. Introduction
1.1. Motivation and Objective
1.2. Measurement System Requirements
- Measurement of downwelling irradiance, as well as downward (sky) and upward (water) radiance just above the water surface, at flexible zenith and azimuth (relative to sun) angles for a spectral range covering at least 400–900 nm with full-width half-maximum (FWHM) spectral resolution of 10 nm or better and spectral sampling every 5 nm or better.
- Storage of all measurements and diagnostic logs and regular transmission to a land-based server.
- User interface with flexibility for scientists to easily program pointing and data acquisition scenarios.
- Reliable autonomous operation at remote sites, e.g., offshore platforms, with a typical maintenance frequency of once or twice per year without grid power.
- Resistance to harsh offshore environments, including large temperature ranges (measurement limited to between 2 °V and 40 °C, and survival between −20 °C and 60 °C ambient temperature), rain, salty sea spray, atmospheric deposition, and possible animals (birds, spiders, etc.).
- Modularity to adapt to sites with different possibilities for power (grid/solar/wind), data transmission channels (cabled internet, 3G/4G cellular networks), and mechanical mounting possibilities (rails, masts, etc.), and to cope with future evolution of system components.
- Moderate hardware purchase costs, e.g., typically <10,000 € commercial price excluding taxes for a full system excluding radiometers.
- Pointing accuracy of at least 5° azimuth and 1° zenith.
1.3. Precursor Autonomous Systems
1.4. Overview of Paper
2. System Design
2.1. Top-Level Design Choices
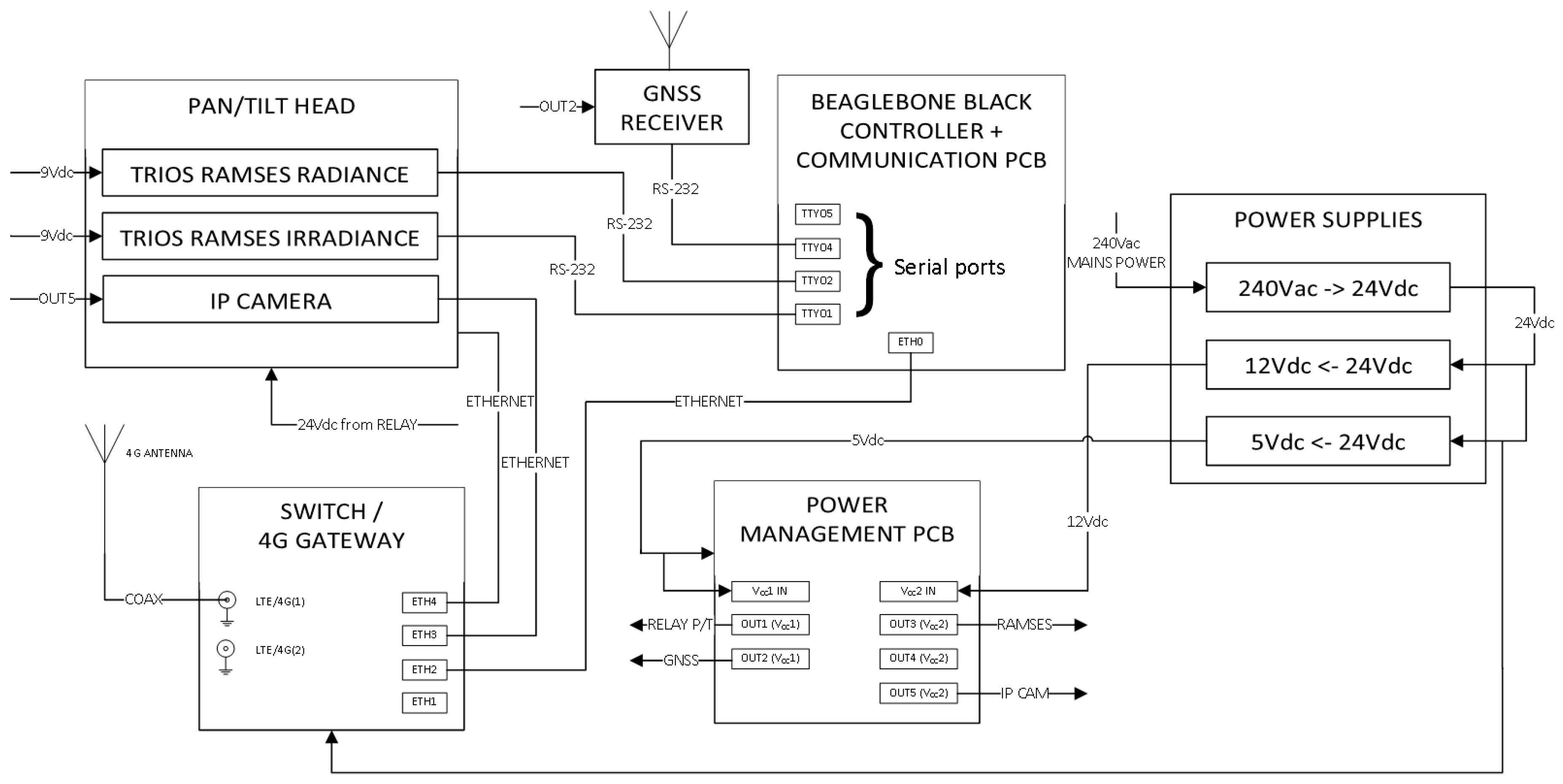
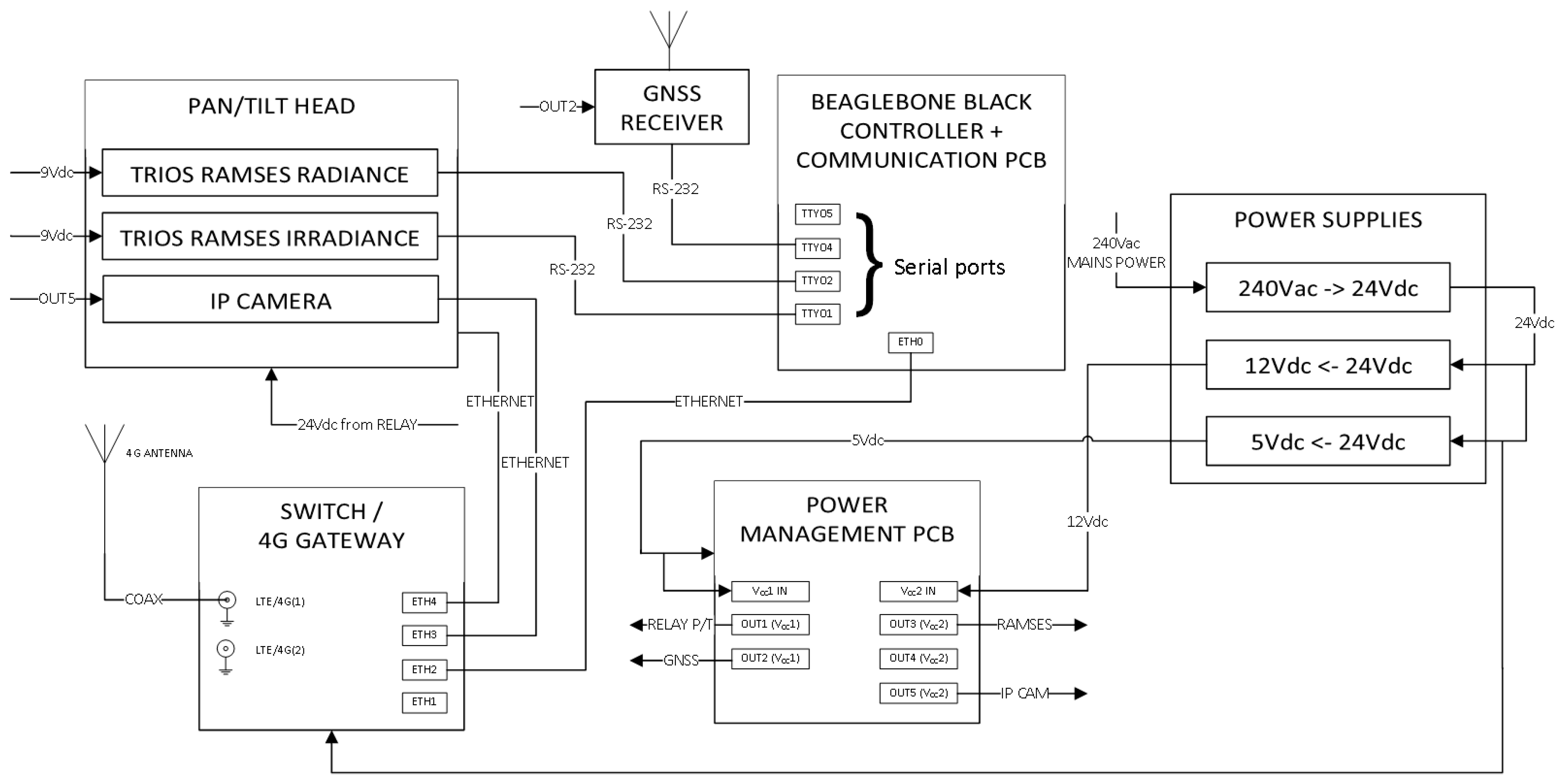
2.2. System Overview and Key Components
- It has five serial ports, which allows it to interface directly with the instruments, without the need for additional external interfaces.
- It is readily available from electronic parts distributors.
2.3. Software and Usage
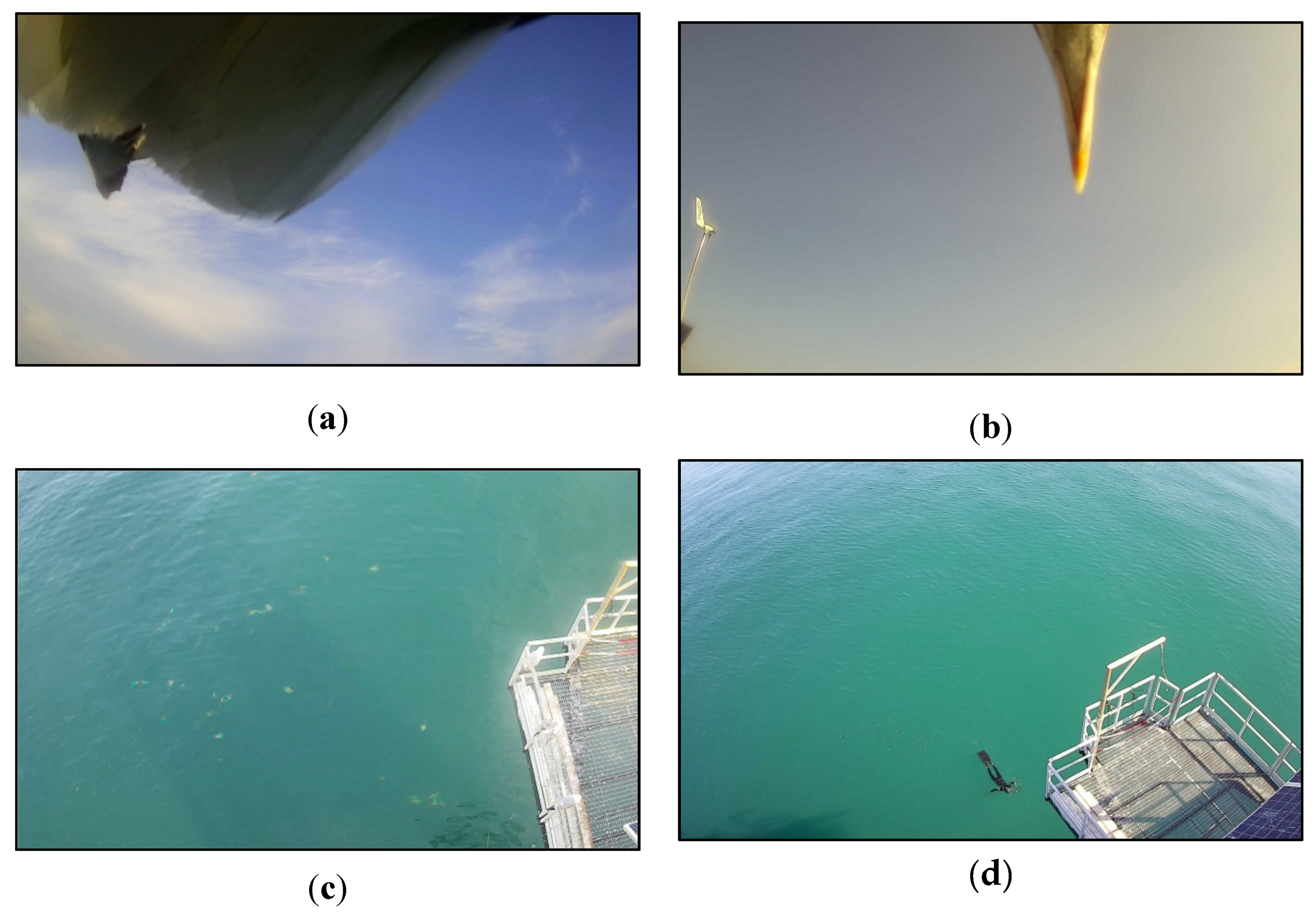
2.4. PANTHYR Data Acquisition Protocol
2.5. PANTHYR Data Processing
- The 16-bit DCs are normalized by dividing by 65,535.
- A long-term dark current correction is performed taking into account the instrument factory characterization and the scan integration time.
- A residual dark signal is subtracted using the mean average from the sensor dark pixels.
- The signal is normalized by the integration time and divided by the calibration sensitivity to retrieve final calibrated (ir)radiances.
3. Prototype Testing
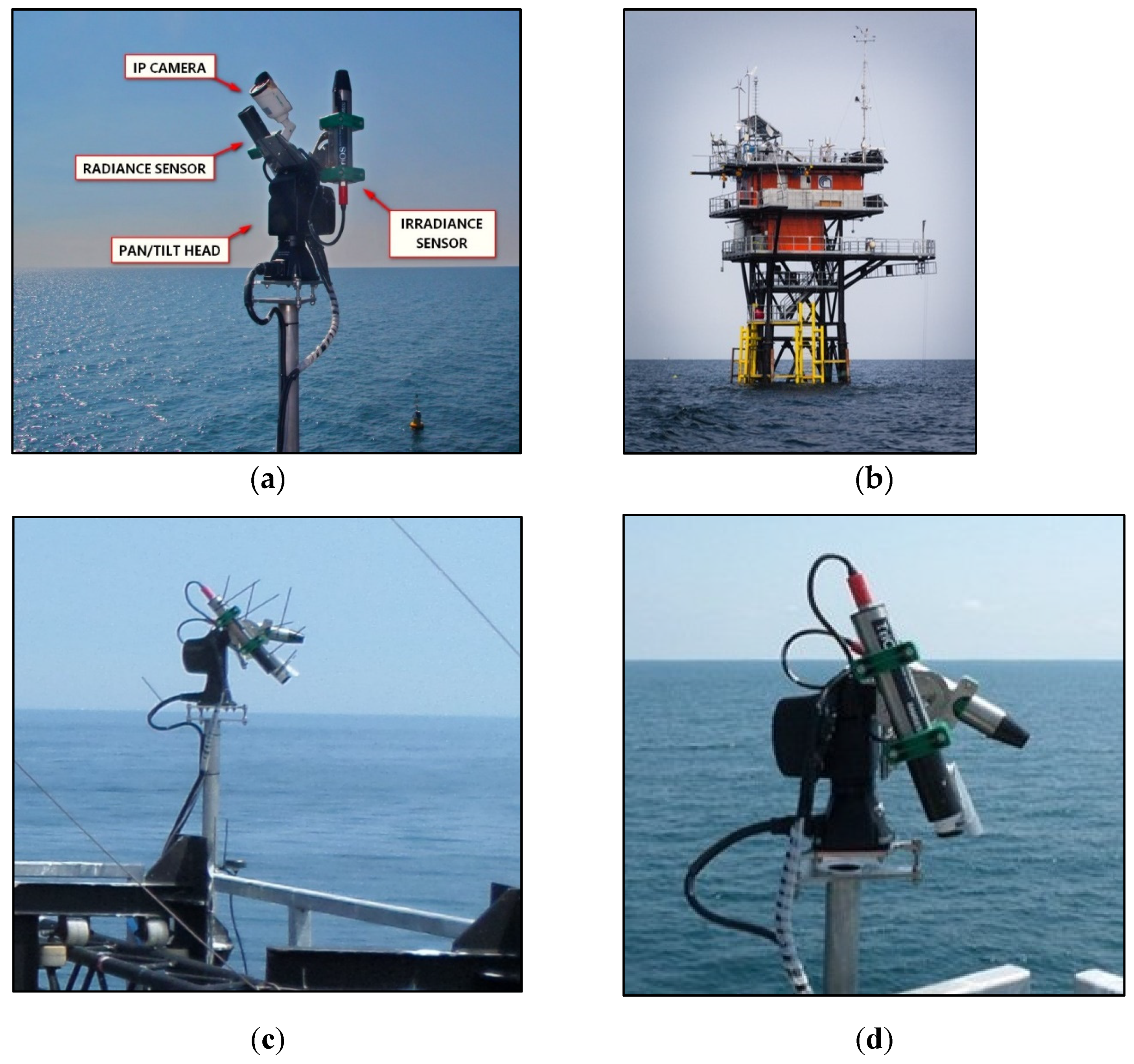
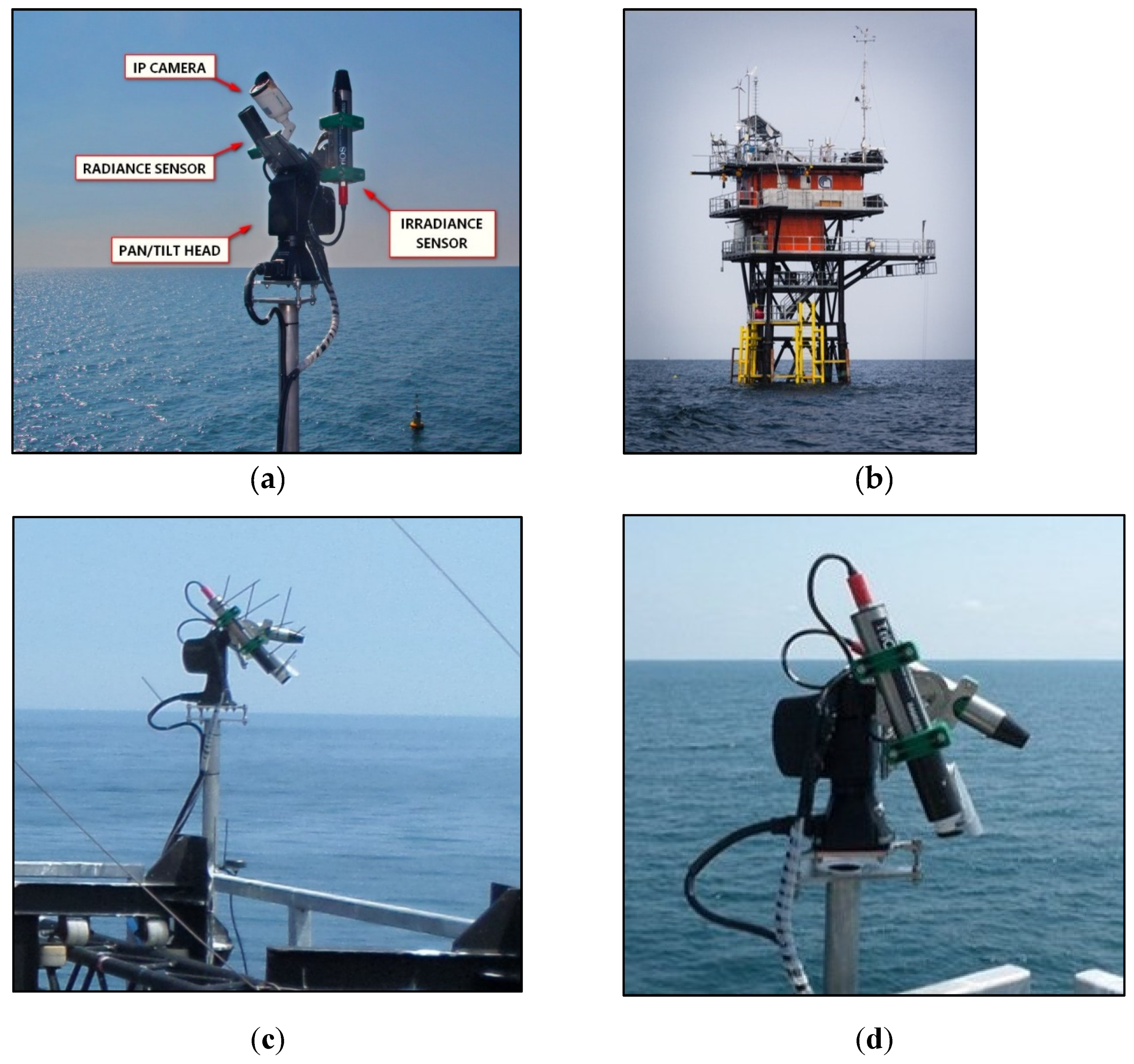
3.1. July 2018 Deployment at the Acqua Alta Oceanographic Tower
3.2. Manually Supervised M3TRIOS System Used for Data Comparison
- The conversion from DCs to calibrated (ir)radiance is performed by the TriOS MSDA_XE software rather than the equivalent Python routines written for PANTHYR.
- Measurements are made simultaneously for , , and with a much larger number of replicate scans, at least 30, with a scan every 10 s for 10 min. The first five scans passing the quality control tests described in Web Appendix 1 of Reference [26] are retained for , , and
- The skyglint correction given as a quadratic function of wind speed by Reference [26] is used as an approximation of the more accurate LUT of Reference [25] described in Section 2.5 for PANTHYR.
- The skyglint correction, Equation (1), and conversion to , Equation (2), and subsequent NIR correction, Equations (3) and (4), are applied to each , , and triplet scan individually to give five scans for before mean-averaging to yield .
3.3. AERONET-OC Data Used for Comparison
4. Results
4.1. System Performance
4.2. Water Reflectance Spectra—Mean over Time
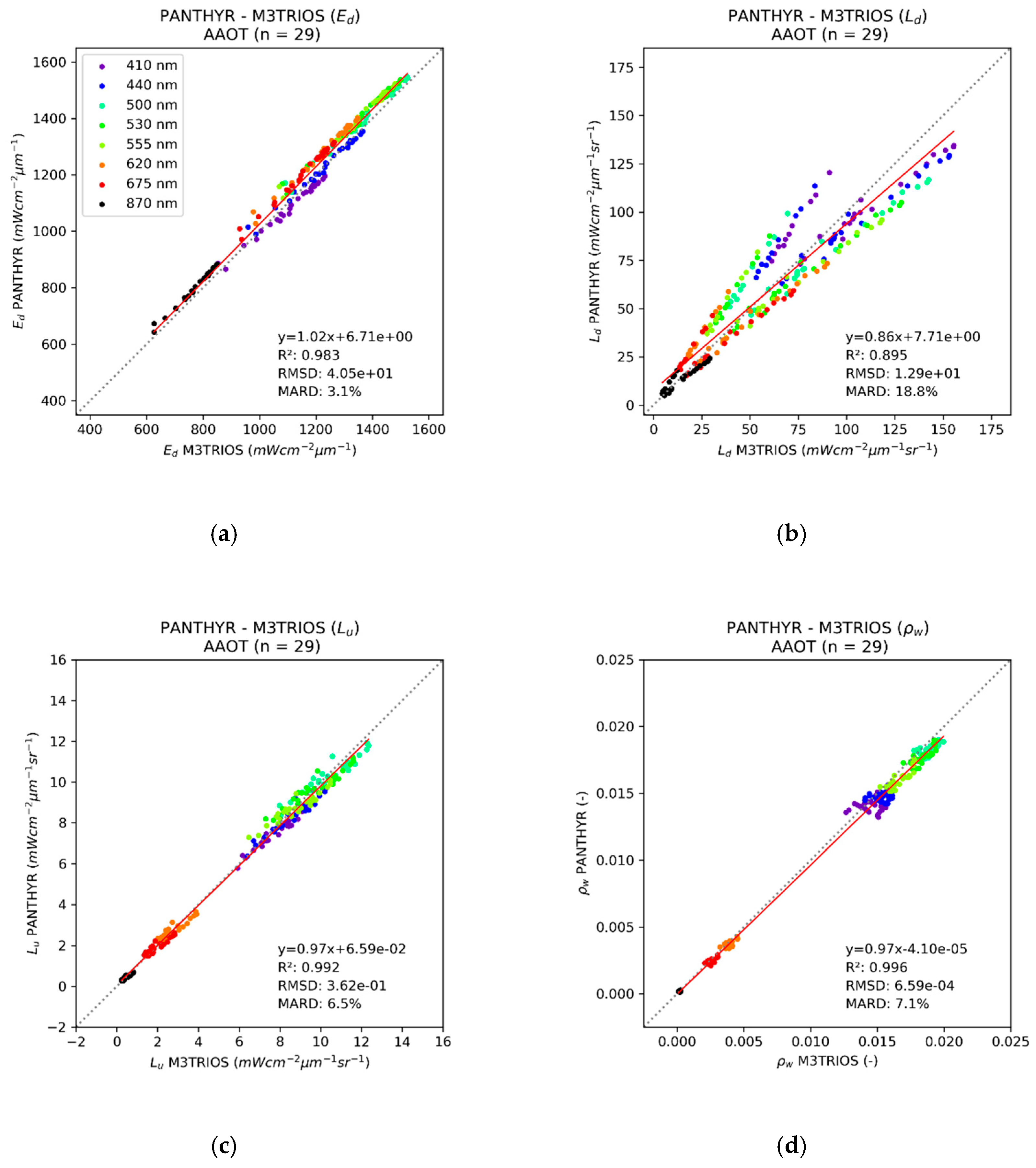
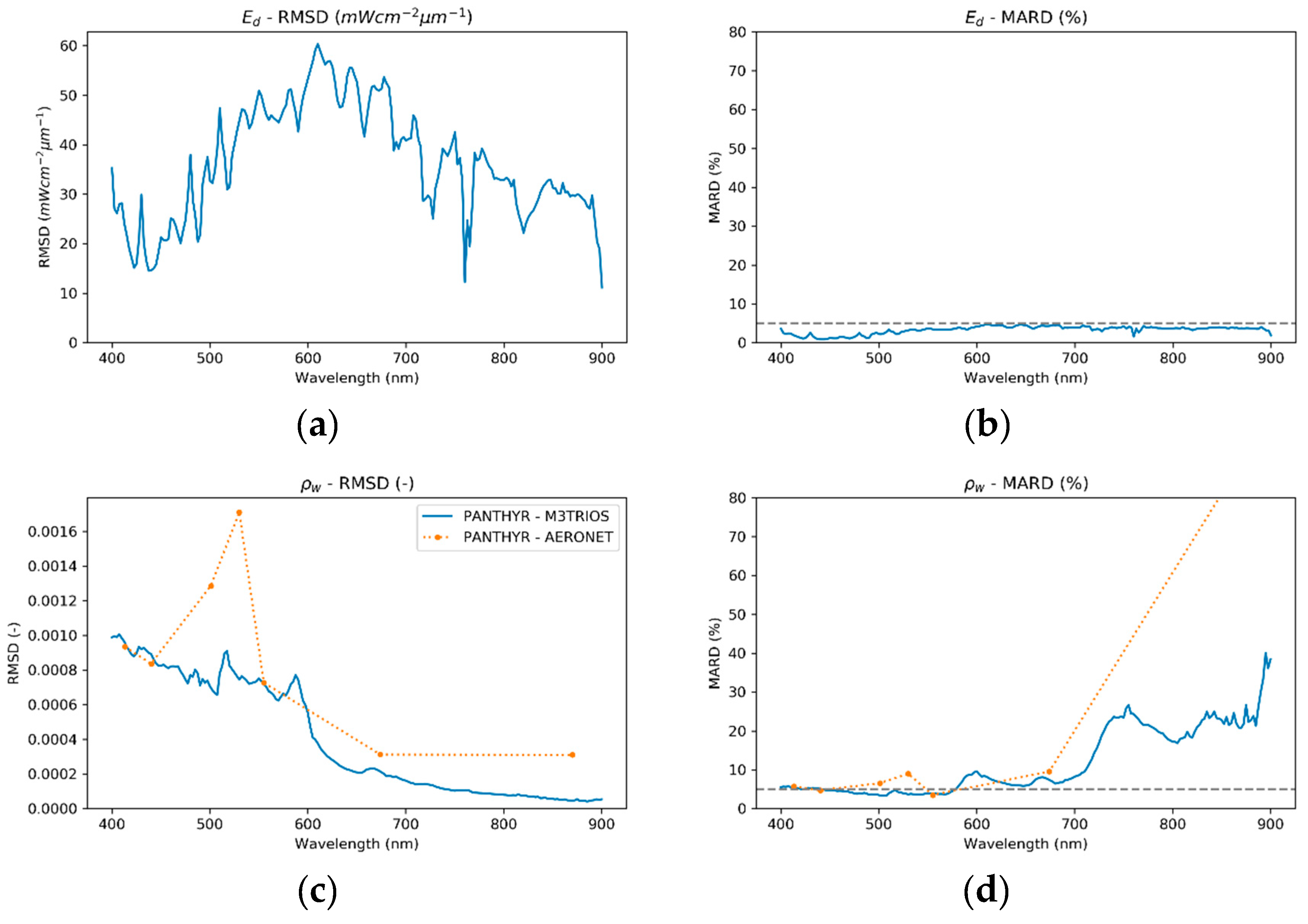
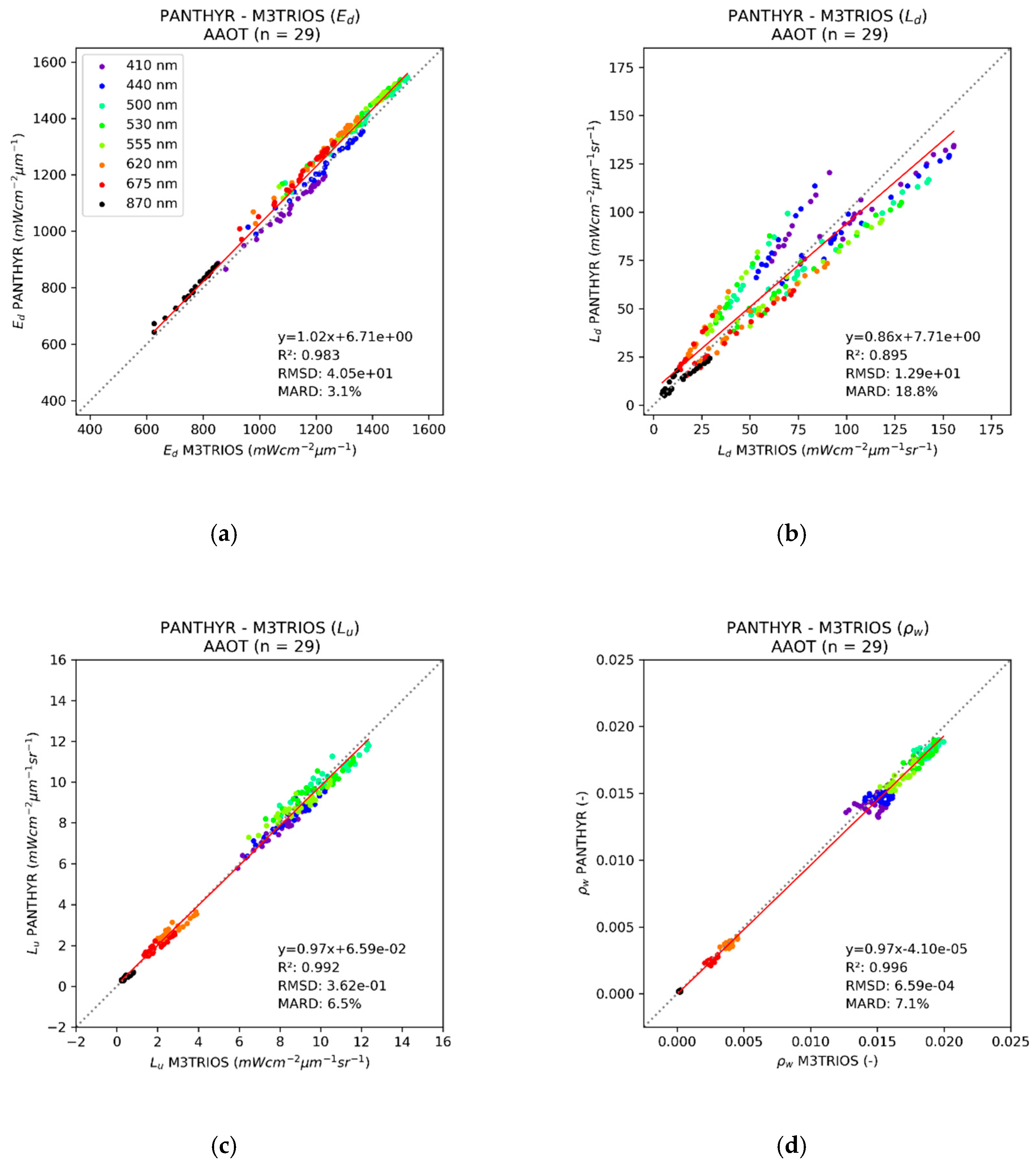
4.3. Data Comparison with M3TRIOS System—Matchup Analysis
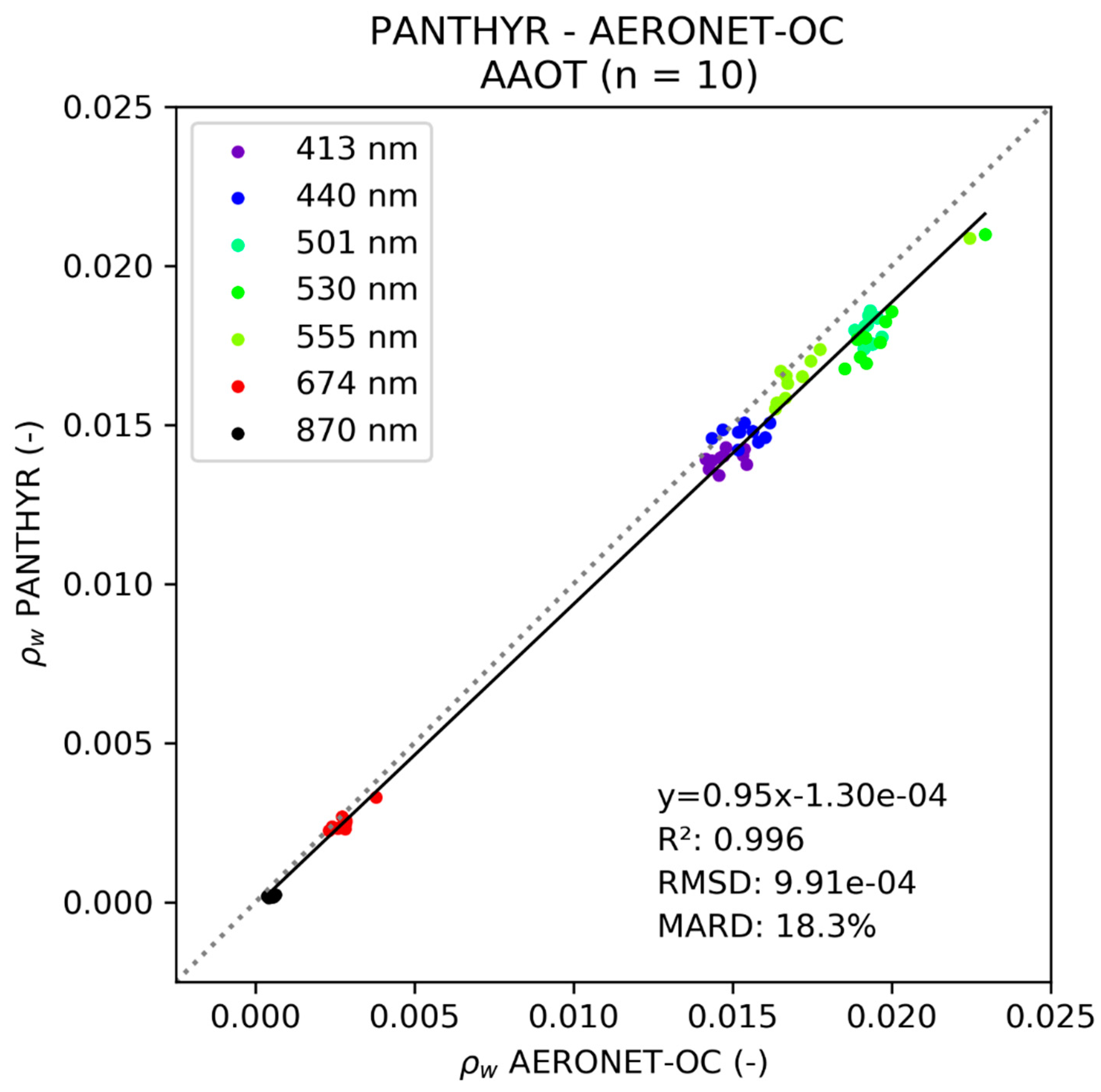
4.4. Data Comparison with AERONET-OC System—Matchup Analysis
5. Conclusions and Future Perspectives
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gohin, F.; Saulquin, B.; Oger-Jeanneret, H.; Lozac’h, L.; Lampert, L.; Lefebvre, A.; Riou, P.; Bruchon, F. Towards a better assessment of the ecological status of coastal waters using satellite-derived chlorophyll-a concentrations. Remote Sens. Environ. 2008, 112, 3329–3340. [Google Scholar] [CrossRef] [Green Version]
- Bresciani, M.; Stroppiana, D.; Odermatt, D.; Morabito, G.; Giardino, C. Assessing remotely sensed chlorophyll-a for the implementation of the Water Framework Directive in European perialpine lakes. Sci. Total Environ. 2011, 409, 3083–3091. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vanhellemont, Q.; Ruddick, K.G. Turbid wakes associated with offshore wind turbines observed with Landsat 8. Remote Sens. Environ. 2014, 145, 105–115. [Google Scholar] [CrossRef] [Green Version]
- Giardino, C.; Brando, V.E.; Gege, P.; Pinnel, N.; Hochberg, E.; Knaeps, E.; Reusen, I.; Doerffer, R.; Bresciani, M.; Braga, F.; et al. Imaging Spectrometry of Inland and Coastal Waters: State of the Art, Achievements and Perspectives. Surv. Geophys. 2018, 40, 401–429. [Google Scholar] [CrossRef] [Green Version]
- Bailey, S.W.; Werdell, P.J. A multi-sensor approach for the on-orbit validation of ocean color satellite data products. Remote Sens. Environ. 2006, 102, 12–23. [Google Scholar] [CrossRef]
- Zibordi, G.; Holben, B.; Slutsker, I.; Giles, D.; D’Alimonte, D.; Mélin, F.; Berthon, J.-F.; Vandemark, D.; Feng, H.; Schuster, G.; et al. AERONET-OC: A network for the validation of ocean color primary product. J. Atmos. Ocean. Technol. 2009, 26, 1634–1651. [Google Scholar] [CrossRef]
- Hlaing, S.; Harmel, T.; Gilerson, A.; Foster, R.; Weidemann, A.; Arnone, R.; Wang, M.; Ahmed, S. Evaluation of the VIIRS ocean color monitoring performance in coastal regions. Remote Sens. Environ. 2013, 139, 398–414. [Google Scholar] [CrossRef]
- Mélin, F.; Sclep, G. Band shifting for ocean color multi-spectral reflectance data. Opt. Express 2015, 23, 2262–2279. [Google Scholar] [CrossRef]
- Holben, B. AERONET—A federated instrument network and data archive for aerosol characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Zibordi, G.; Mélin, F.; Hooker, S.B.; D’Alimonte, D.; Holben, B. An autonomous above-water system for the validation of ocean colour radiance data. IEEE TGARS 2004, 42, 401–415. [Google Scholar]
- Barreto, Á.; Cuevas, E.; Granados-Muñoz, M.-J.; Alados-Arboledas, L.; Romero, P.M.; Gröbner, J.; Kouremeti, N.; Almansa, A.F.; Stone, T.; Toledano, C.; et al. The new sun-sky-lunar Cimel CE318-T multiband photometer – a comprehensive performance evaluation. Atmos. Meas. Tech. 2016, 9, 631–654. [Google Scholar] [CrossRef] [Green Version]
- Hooker, S.B.; Bernhard, G.; Morrow, J.H.; Booth, C.R.; Comer, T.; Lind, R.N.; Quang, V. Optical Sensors for Planetary Radiant Energy (Osprey): Calibration and Validation of Current and Next-Generation Nasa Missions; NASA Tech. Memo. 2011–215872; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2012.
- Simis, S.G.H.; Olsson, J. Unattended processing of shipborne hyperspectral reflectance measurements. Remote Sens. Environ. 2013, 135, 202–212. [Google Scholar] [CrossRef] [Green Version]
- Slivkoff, M.M. Ocean Colour Remote Sensing of the Great Barrier Reef Water. Ph.D. Thesis, Department of Imaging & Applied Physics, School of Science, Curtin University, Curtin, Australia, 2014. [Google Scholar]
- Brando, V.; Lovell, J.; King, E.; Boadle, D.; Scott, R.; Schroeder, T. The Potential of Autonomous Ship-Borne Hyperspectral Radiometers for the Validation of Ocean Color Radiometry Data. Remote Sens. 2016, 8, 150. [Google Scholar] [CrossRef]
- Carswell, T.; Costa, M.; Young, E.; Komick, N.; Gower, J.; Sweeting, R. Evaluation of MODIS-Aqua Atmospheric Correction and Chlorophyll Products of Western North American Coastal Waters Based on 13 Years of Data. Remote Sens. 2017, 9, 1063. [Google Scholar] [CrossRef]
- Hommersom, A.; Kratzer, S.; Laanen, M.; Ansko, I.; Ligi, M.; Bresciani, M.; Giardino, C.; Betlrán-Abaunza, J.M.; Moore, G.; Wernand, M.R.; et al. Intercomparison in the field between the new WISP-3 and other radiometers (TriOS Ramses, ASD FieldSpec, and TACCS). J. Appl. Remote Sens. 2012, 6, 063615. [Google Scholar] [CrossRef]
- Ruddick, K.; De Cauwer, V.; Park, Y.; Becu, G.; De Blauwe, J.-P.; Vreker, E.D.; Deschamps, P.-Y.; Knockaert, M.; Nechad, B.; Pollentier, A.; et al. Preliminary Validation of MERIS Water Products for Belgian Coastal Waters; European Space Agency: Paris, France, 2003; Volume SP-531. [Google Scholar]
- Talone, M.; Zibordi, G.; Ansko, I.; Banks, A.C.; Kuusk, J. Stray light effects in above-water remote-sensing reflectance from hyperspectral radiometers. Appl. Opt. 2016, 55, 3966. [Google Scholar] [CrossRef] [PubMed]
- Zibordi, G.; Talone, M.; Jankowski, L. Response to Temperature of a Class of In Situ Hyperspectral Radiometers. J. Atmos. Ocean. Technol. 2017, 34, 1795–1805. [Google Scholar] [CrossRef]
- Talone, M.; Zibordi, G. Polarimetric characteristics of a class of hyperspectral radiometers. Appl. Opt. 2016, 55, 10092. [Google Scholar] [CrossRef] [PubMed]
- Mekaoui, S.; Zibordi, G. Cosine error for a class of hyperspectral irradiance sensors. Metrologia 2013, 50, 187–199. [Google Scholar] [CrossRef]
- Olesen, D.; Jakobsen, J.; Knudsen, P. Knudsen Low-cost GNSS sampler based on the beaglebone black SBC. In Proceedings of the 2016 8th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 14–16 December 2016; pp. 1–7. [Google Scholar]
- Mollon, M.; Kaneko, E.H.; Niro, L.; Montezuma, M. Remote Laboratory for a Servomotor Control System with Embedded Architecture; IJAREEIE: Chennai, Tamilnadu, India, 2017; Volume 6. [Google Scholar]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef] [PubMed]
- Ruddick, K.; De Cauwer, V.; Park, Y.; Moore, G. Seaborne measurements of near infrared water-leaving reflectance: The similarity spectrum for turbid waters. Limnol. Oceanogr. 2006, 51, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- Doyle, J.P.; Zibordi, G. Optical propagation within a three-dimensional shadowed atmosphere–ocean field: Application to large deployment structures. Appl. Opt. 2002, 41, 4283–4306. [Google Scholar] [CrossRef] [PubMed]
- Ruddick, K.; Cauwer, V.D.; Van Mol, B. Use of the Near Infrared Similarity Spectrum for the Quality Control of Remote Sensing Data; Frouin, R.J., Babin, M., Sathyendranath, S., Eds.; SPIE: Bellingham, WA, USA, 2005; Volume 5885. [Google Scholar]
- Zibordi, G.; Berthon, J.F.; Doyle, J.P.; Grossi, S.; van der linde, D.; Targa, C.; Alberotanza, L. Coastal Atmosphere and Sea Time Series (CoASTS), Part 1: A Long-Term Measurement Program; Tech Memo TM-2002-206892; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2002.
- Hooker, S.B.; Lazin, G.; Zibordi, G.; McLean, S. An evaulation of above- and in-water methods for determining water-leaving radiances. J. Atmos. Ocean. Technol. 2002, 19, 486–515. [Google Scholar] [CrossRef]
- Zibordi, G.; Ruddick, K.; Ansko, I.; Moore, G.; Kratzer, S.; Icely, J.; Reinart, A. In situ determination of the remote sensing reflectance. Ocean Sci. 2012, 8, 567–586. [Google Scholar] [CrossRef]
- Morel, A.; Antoine, D.; Gentili, B. Bidirectional reflectance of oceanic waters: Accounting for Raman emission and varying particle scattering phase function. Appl. Opt. 2002, 41, 6289–6306. [Google Scholar] [CrossRef] [PubMed]
- Thuillier, G.; Herse, M.; Labs, D.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.C.; Mandel, H. The solar spectral irradiance from 200 to 2400 nm as measured by the SOLSPEC spectrometer from the ATLAS and EURECA missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- Vabson, V.; Kuusk, J.; Ansko, I.; Vendt, R.; Alikas, K.; Ruddick, K.; Ansper, A.; Bresciani, M.; Burmester, H.; Costa, M.; et al. Field intercomparison of radiometers used for satellite validation in the 400–900 nm range. Remote Sens. 2019, 11, 1129. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Cycle Number | Instrument | Measurement | Zenith Angle (°) | Azimuth Relative to Sun (°) | Replicate Scans |
|---|---|---|---|---|---|
| 1 | Irradiance | 180 | 90 | 3 | |
| 2 | Radiance | 140 | 90 | 3 | |
| 3 | Camera | Sky photo | 140 | 90 | - |
| 4 | Radiance | 40 | 90 | 11 | |
| 5 | Camera | Water photo | 40 | 90 | - |
| 6 | Radiance | 140 | 90 | 3 | |
| 7 | Irradiance | 180 | 90 | 3 | |
| 8–14 | As 1–7 | As 1–7 | As 1–7 | 135 | As 1–7 |
| 15–21 | As 1–7 | As 1–7 | As 1–7 | 225 | As 1–7 |
| 22–28 | As 1–7 | As 1–7 | As 1–7 | 270 | As 1–7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vansteenwegen, D.; Ruddick, K.; Cattrijsse, A.; Vanhellemont, Q.; Beck, M. The Pan-and-Tilt Hyperspectral Radiometer System (PANTHYR) for Autonomous Satellite Validation Measurements—Prototype Design and Testing. Remote Sens. 2019, 11, 1360. https://doi.org/10.3390/rs11111360
Vansteenwegen D, Ruddick K, Cattrijsse A, Vanhellemont Q, Beck M. The Pan-and-Tilt Hyperspectral Radiometer System (PANTHYR) for Autonomous Satellite Validation Measurements—Prototype Design and Testing. Remote Sensing. 2019; 11(11):1360. https://doi.org/10.3390/rs11111360
Chicago/Turabian StyleVansteenwegen, Dieter, Kevin Ruddick, André Cattrijsse, Quinten Vanhellemont, and Matthew Beck. 2019. "The Pan-and-Tilt Hyperspectral Radiometer System (PANTHYR) for Autonomous Satellite Validation Measurements—Prototype Design and Testing" Remote Sensing 11, no. 11: 1360. https://doi.org/10.3390/rs11111360
APA StyleVansteenwegen, D., Ruddick, K., Cattrijsse, A., Vanhellemont, Q., & Beck, M. (2019). The Pan-and-Tilt Hyperspectral Radiometer System (PANTHYR) for Autonomous Satellite Validation Measurements—Prototype Design and Testing. Remote Sensing, 11(11), 1360. https://doi.org/10.3390/rs11111360