Corridor Mapping of Sandy Coastal Foredunes with UAS Photogrammetry and Mobile Laser Scanning

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
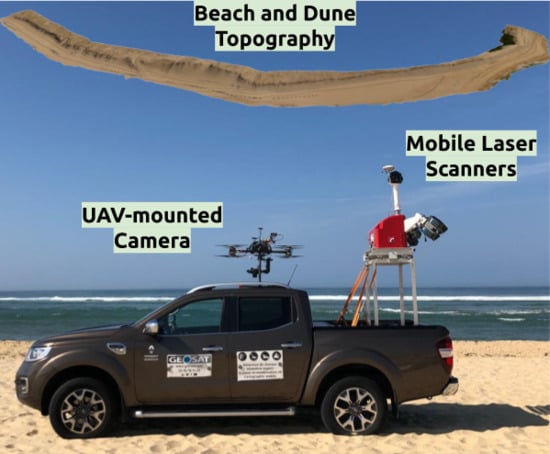
2.2. Mobile Laser Scanning and Unmanned Aircraft System
2.3. Ground Control Points and GNSS Processing
2.4. Geodata Acquisition and Processing
2.4.1. Mission Profiles
2.4.2. MLS Data Processing
2.4.3. UAS Data Processing
3. Results
3.1. MLS Point Clouds
3.2. Photogrammetric Point Clouds
3.3. Photogrammetric DEMs
4. Discussion
4.1. Experiment Originality
4.2. Hybrid UAS-MLS Performance
4.3. Foreseen Applications
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Elko, N.A.; Feddersen, F.; Foster, D.; Hapke, C.J.; McNinch, J.E.; Mulligan, R.P.; Tuba Özkan Haller, H.; Plant, N.G.; Raubenheimer, B. The future of nearshore processes research. Shore Beach 2015, 83, 13–38. [Google Scholar]
- IPCC. Coastal Systems and Low-Lying Areas. In Climate Change 2014—Impacts, Adaptation and Vulnerability: Part A: Global and Sectoral Aspects: Working Group II Contribution to the IPCC Fifth Assessment Report; Cambridge University Press: Cambridge, UK, 2014; Volume 1, pp. 361–410. [Google Scholar] [CrossRef]
- Masselink, G.; Castelle, B.; Scott, T.; Dodet, G.; Suanez, S.; Jackson, D.; Floc’h, F. Extreme wave activity during 2013/2014 winter and morphological impacts along the Atlantic coast of Europe. Geophys. Res. Lett. 2016, 43, 2135–2143. [Google Scholar] [CrossRef]
- Splinter, K.D.; Harley, M.D.; Turner, I.L. Remote Sensing Is Changing Our View of the Coast: Insights from 40 Years of Monitoring at Narrabeen-Collaroy, Australia. Remote Sens. 2018, 10, 1744. [Google Scholar] [CrossRef]
- Almeida, L.; Almar, R.; Bergsma, E.; Berthier, E.; Baptista, P.; Garel, E.; Dada, O.; Alves, B. Deriving High Spatial-Resolution Coastal Topography From Sub-meter Satellite Stereo Imagery. Remote Sens. 2019, 11, 590. [Google Scholar] [CrossRef]
- Ruessink, G.; Schwarz, C.S.; Price, T.D.; Donker, J.J.A. A Multi-Year Data Set of Beach-Foredune Topography and Environmental Forcing Conditions at Egmond aan Zee, The Netherlands. Data 2019, 4, 73. [Google Scholar] [CrossRef]
- European Commission. Report on the Blue Growth StrategyTowards More Sustainable Growth And Jobs in the Blue Economy; European Commission: Brussels, Belgium, 2017. [Google Scholar]
- Turner, I.L.; Harley, M.D.; Short, A.D.; Simmons, J.A.; Bracs, M.A.; Phillips, M.S.; Splinter, K.D. A multi-decade dataset of monthly beach profile surveys and inshore wave forcing at Narrabeen, Australia. Sci. Data 2016, 3, 160024. [Google Scholar] [CrossRef] [PubMed]
- Le Mauff, B.; Juigner, M.; Ba, A.; Robin, M.; Launeau, P.; Fattal, P. Coastal monitoring solutions of the geomorphological response of beach-dune systems using multi-temporal LiDAR datasets (Vendée coast, France). Geomorphology 2018, 304, 121–140. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Sturdivant, E.J.; Lentz, E.E.; Thieler, E.R.; Farris, A.S.; Weber, K.M.; Remsen, D.P.; Miner, S.; Henderson, R.E. UAS-SfM for Coastal Research: Geomorphic Feature Extraction and Land Cover Classification from High-Resolution Elevation and Optical Imagery. Remote Sens. 2017, 9, 1020. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for coastal surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Rehak, M. Integrated Sensor Orientation on Micro Aerial Vehicles; EPFL: Lausanne, Switzerland, 2017; p. 226. [Google Scholar]
- Tournadre, V.; Pierrot-Deseilligny, M.; Faure, P.H. UAV linear photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-3/W3, 327–333. [Google Scholar] [CrossRef]
- Jaud, M.; Passot, S.; Allemand, P.; Le Dantec, N.; Grandjean, P.; Delacourt, C. Suggestions to Limit Geometric Distortions in the Reconstruction of Linear Coastal Landforms by SfM Photogrammetry with PhotoScan® and MicMac® for UAV Surveys with Restricted GCPs Pattern. Drones 2019, 3, 2. [Google Scholar] [CrossRef]
- Castelle, B.; Marieu, V.; Bujan, S.; Splinter, K.D.; Robinet, A.; Sénéchal, N.; Ferreira, S. Impact of the winter 2013–2014 series of severe Western Europe storms on a double-barred sandy coast: Beach and dune erosion and megacusp embayments. Geomorphology 2015, 238, 135–148. [Google Scholar] [CrossRef]
- Barber, D.M.; Mills, J.P. Vehicle Based Waveform Laser Scanning in a Coastal Environment. In Proceedings of the 5th International Symposium on Mobile Mapping Technology, Padua, Italy, 29–31 May 2007; p. 6. [Google Scholar]
- Bitenc, M.; Lindenbergh, R.; Khoshelham, K.; Van Waarden, A.P. Evaluation of a LIDAR Land-Based Mobile Mapping System for Monitoring Sandy Coasts. Remote Sens. 2011, 3, 1472–1491. [Google Scholar] [CrossRef]
- Donker, J.; van Maarseveen, M.; Ruessink, G. Spatio-Temporal Variations in Foredune Dynamics Determined with Mobile Laser Scanning. J. Mar. Sci. Eng. 2018, 6, 126. [Google Scholar] [CrossRef]
- Lim, S.; Thatcher, C.A.; Brock, J.C.; Kimbrow, D.R.; Danielson, J.J.; Reynolds, B.J. Accuracy assessment of a mobile terrestrial lidar survey at Padre Island National Seashore. Int. J. Remote Sens. 2013, 34, 6355–6366. [Google Scholar] [CrossRef]
- Molina, P.; Blázquez, M.; Sastre, J. mapKITE: A New Paradigm for Simultaneous Aerial and Terrestrial Geodata Acquisition and Mapping. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016. [Google Scholar]
- Molina, P.; Blázquez, M.; Sastre, J.; Colomina, I. Precision Analysis of Point-And Photogrammetric Measurements for Corridor Mapping: Preliminary Results. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 85–90. [Google Scholar] [CrossRef]
- Molina, P.; Blázquez, M.; Cucci, D.A.; Colomina, I. First Results of a Tandem Terrestrial-Unmanned Aerial mapKITE System with Kinematic Ground Control Points for Corridor Mapping. Remote Sens. 2017, 9, 60. [Google Scholar] [CrossRef]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Salach, A.; Bakuła, K.; Pilarska, M.; Ostrowski, W.; Górski, K.; Kurczyński, Z. Accuracy Assessment of Point Clouds from LiDAR and Dense Image Matching Acquired Using the UAV Platform for DTM Creation. ISPRS Int. J. Geo.-Inf. 2018, 7, 342. [Google Scholar] [CrossRef]
- Elsner, P.; Dornbusch, U.; Thomas, I.; Amos, D.; Bovington, J.; Horn, D. Coincident beach surveys using UAS, vehicle mounted and airborne laser scanner: Point cloud inter-comparison and effects of surface type heterogeneity on elevation accuracies. Remote Sens. Environ. 2018, 208, 15–26. [Google Scholar] [CrossRef]
- European Commission. NEPTUNE Blue Growth Accelerator. 2018. Available online: www.neptune-project.eu (accessed on 6 March 2019).
- Castelle, B.; Guillot, B.; Marieu, V.; Chaumillon, E.; Hanquiez, V.; Bujan, S.; Poppeschi, C. Spatial and temporal patterns of shoreline change of a 280-km high-energy disrupted sandy coast from 1950 to 2014: SW France. Estuar. Coast. Shelf Sci. 2018, 200, 212–223. [Google Scholar] [CrossRef]
- Nahon, A.; Idier, D.; Sénéchal, N.; Féniès, H.; Mallet, C.; Mugica, J. Imprints of wave climate and mean sea level variations in the dynamics of a coastal spit over the last 250 years: Cap Ferret, SW France. Earth Surf. Process. Landf. 2019. [Google Scholar] [CrossRef]
- Nahon, A. Ongoing Morphological Evolution of a Holocene Coastal Barrier Spit: The Cap Ferret, at the Entrance of the Bay of Arcachon. Ph.D. Thesis, Université de Bordeaux, Bordeaux, France, 2018. [Google Scholar]
- SitecoInformatica. Brochure Road-Scanner 3; Technical Report; SitecoInformatica: Bologna, Italy, 2016. [Google Scholar]
- FARO. FARO Laser Scanner Focus M&S Tech Sheet; FARO: Lake Mary, FL, USA, 2019. [Google Scholar]
- Rokubun. Brochure Argonaut; Technical Report; Rokubun: Barcelona, Spain.
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Wichmann, V.; Böhner, J. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef]
- CloudCompare. GPL Software, Version 2.10. 2019. Available online: www.cloudcompare.org (accessed on 18 March 2019).
- Colomina, I.; Blázquez, M.; Navarro, J.; Sastre, J. The need and keys for a new generation network adjustment software. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B1, 303–308. [Google Scholar] [CrossRef]
- Isenburg, M. LAStools; rapidlasso GmbH: Gilching, Germany, 2012. [Google Scholar]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Gonçalves, J.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Long, N.; Millescamps, B.; Guillot, B.; Pouget, F.; Bertin, X. Monitoring the Topography of a Dynamic Tidal Inlet Using UAV Imagery. Remote Sens. 2016, 8, 387. [Google Scholar] [CrossRef]
- Tonkin, T.; Midgley, N. Ground-Control Networks for Image Based Surface Reconstruction: An Investigation of Optimum Survey Designs Using UAV Derived Imagery and Structure-from-Motion Photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- Ruessink, B.G.; Arens, S.M.; Kuipers, M.; Donker, J.J.A. Coastal dune dynamics in response to excavated foredune notches. Aeolian Res. 2018, 31, 3–17. [Google Scholar] [CrossRef]
- Laporte-Fauret, Q.; Marieu, V.; Castelle, B.; Michalet, R.; Bujan, S.; Rosebery, D. Low-Cost UAV for High-Resolution and Large-Scale Coastal Dune Change Monitoring Using Photogrammetry. J. Mar. Sci. Eng. 2019, 7, 63. [Google Scholar] [CrossRef]
- Li, H.; Chen, L.; Wang, Z.; Yu, Z. Mapping of River Terraces with Low-Cost UAS Based Structure-from-Motion Photogrammetry in a Complex Terrain Setting. Remote Sens. 2019, 11, 464. [Google Scholar] [CrossRef]
- Gonçalves, G.R.; Pérez, J.A.; Duarte, J. Accuracy and effectiveness of low cost UASs and open source photogrammetric software for foredunes mapping. Int. J. Remote Sens. 2018, 39, 5059–5077. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cloud Id | Pass Direction | Car Speed | # of Points | # of (Cleaned) Ground pts | Bias (cm) | Std. (cm) |
|---|---|---|---|---|---|---|
| P1 | Southward | < 3.5 m·s−1 | 90,124,979 | 87,391,199 | −0.5 | 1.6 |
| P2 | Northward | < 3.5 m·s−1 | 102,224,369 | 100,803,317 | 0.1 | 1.5 |
| P3 | Southward | < 6 m·s−1 | 47,856,951 | 47,324,567 | 0.3 | 1.5 |
| P4 | Northward | < 5 m·s−1 | 60,913,147 | 59,924,932 | 0.1 | 1.4 |
| Cloud Id | All Points | Flat Areas | Steep Areas | |||
|---|---|---|---|---|---|---|
| Bias (cm) | Std. (cm) | Bias (cm) | Std. (cm) | Bias (cm) | Std. (cm) | |
| P1_resampled | 0.4 | 9.9 | −0.2 | 5.2 | 1.9 | 16.3 |
| P2_resampled | 1.0 | 8.7 | 0.7 | 2.7 | 1.9 | 15.7 |
| P3_resampled | 1.1 | 9.3 | 0.7 | 2.7 | 2.0 | 16.7 |
| P4_resampled | 1.0 | 8.8 | 0.7 | 2.4 | 1.9 | 16.2 |
| ISO_18GCPs | 1.3 | 13.7 | −1.3 | 9.3 | 5.2 | 17.7 |
| ISO_4GCPs+KGCPs | −2.0 | 14.4 | −5.7 | 9.5 | 3.7 | 18.2 |
| Ref. | (cm) | # of GCPs | Extent (m) | AGL (m) | GSD (cm) | Image Overlap |
|---|---|---|---|---|---|---|
| Mancini et al. [39] | 22.0 | 18 | 2.7 ha | 40 | 0.6 | 2D |
| Gonçalves et al. [40] | 4.6 | 12 | 800 × 500 | 131 | 4.5 | 2D |
| Long et al. [41] | 16 | 56 | 400 ha | 150 | 4.6 | 2D |
| Turner et al. [13] | 7.3 | 0 | 3500 × - | 100 | 3.4 | 2D |
| Sturdivant et al. [11] | 3.6 | 18 | 500 × 300 | 35 | 2.5 | 2D |
| Elsner et al. [27] | 8 | 49 | 450 × 150 | 70 | 1.7 | 2D |
| Ruessink et al. [43] | 6.7; 10.7 | 33; 39 | 800 × 500 | - | - | 2D |
| Gonçalves et al. [46] | 12 | 10 | 700 × 100 | 80 and 100 | 4.7 | 2D |
| Laporte-Fauret et al. [44] | 5 | 5 | 1000 × 350 | 70 | 1.78 | 2D |
| ISO_18GCPs | 13.8 | 18 | 1500 × 70 | 70 | 1.8 | 1D |
| ISO_4GCPs+KGCPs | 14.5 | 4 | 1500 × 70 | 70 | 1.8 | 1D |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nahon, A.; Molina, P.; Blázquez, M.; Simeon, J.; Capo, S.; Ferrero, C. Corridor Mapping of Sandy Coastal Foredunes with UAS Photogrammetry and Mobile Laser Scanning. Remote Sens. 2019, 11, 1352. https://doi.org/10.3390/rs11111352
Nahon A, Molina P, Blázquez M, Simeon J, Capo S, Ferrero C. Corridor Mapping of Sandy Coastal Foredunes with UAS Photogrammetry and Mobile Laser Scanning. Remote Sensing. 2019; 11(11):1352. https://doi.org/10.3390/rs11111352
Chicago/Turabian StyleNahon, Alphonse, Pere Molina, Marta Blázquez, Jennifer Simeon, Sylvain Capo, and Cédrik Ferrero. 2019. "Corridor Mapping of Sandy Coastal Foredunes with UAS Photogrammetry and Mobile Laser Scanning" Remote Sensing 11, no. 11: 1352. https://doi.org/10.3390/rs11111352
APA StyleNahon, A., Molina, P., Blázquez, M., Simeon, J., Capo, S., & Ferrero, C. (2019). Corridor Mapping of Sandy Coastal Foredunes with UAS Photogrammetry and Mobile Laser Scanning. Remote Sensing, 11(11), 1352. https://doi.org/10.3390/rs11111352