Improvement of Full Waveform Airborne Laser Bathymetry Data Processing based on Waves of Neighborhood Points


Abstract
1. Introduction
- Return detection (echo): this method focuses on the location of the target with the omission of radiometric traits. The echo locations are detected directly by using the threshold, centre of gravity, and the maximum or zero crossing of the second derivatives [14].
- Mathematical approximation: this method is based on fitting a mathematical function into the recorded waveform. Examples of such functions include Gaussian decomposition, Weibull function, generalized Gaussian function, and more. Chauve et al. [15] proposed the mixture of Lognormal and generalized Gaussian functions to waveform decomposition. Abdallah et al. [16] used a triangular function for full waveform processing. Adaby et al. [17] and Ding et al. [18] presented the combination of a quadrilateral function with Gaussian function. They used three functions: two Gaussian functions for the water surface and the water bottom contribution and a quadrilateral function to fit the water column. Wang et al. [19] proposed the multiscale wavelet analysis for waveform characterization and average tree height estimation.
- Deconvolution: this method consists of removing components of the emitted wave from the received signal. Examples of this method include Wiener filter deconvolution [20], Richardson–Lucy deconvolution [21], expectation maximization (EM) deconvolution [22], exponential decomposition with implicit deconvolution [23], and wavelet deconvolution [24].
2. Materials and Methods
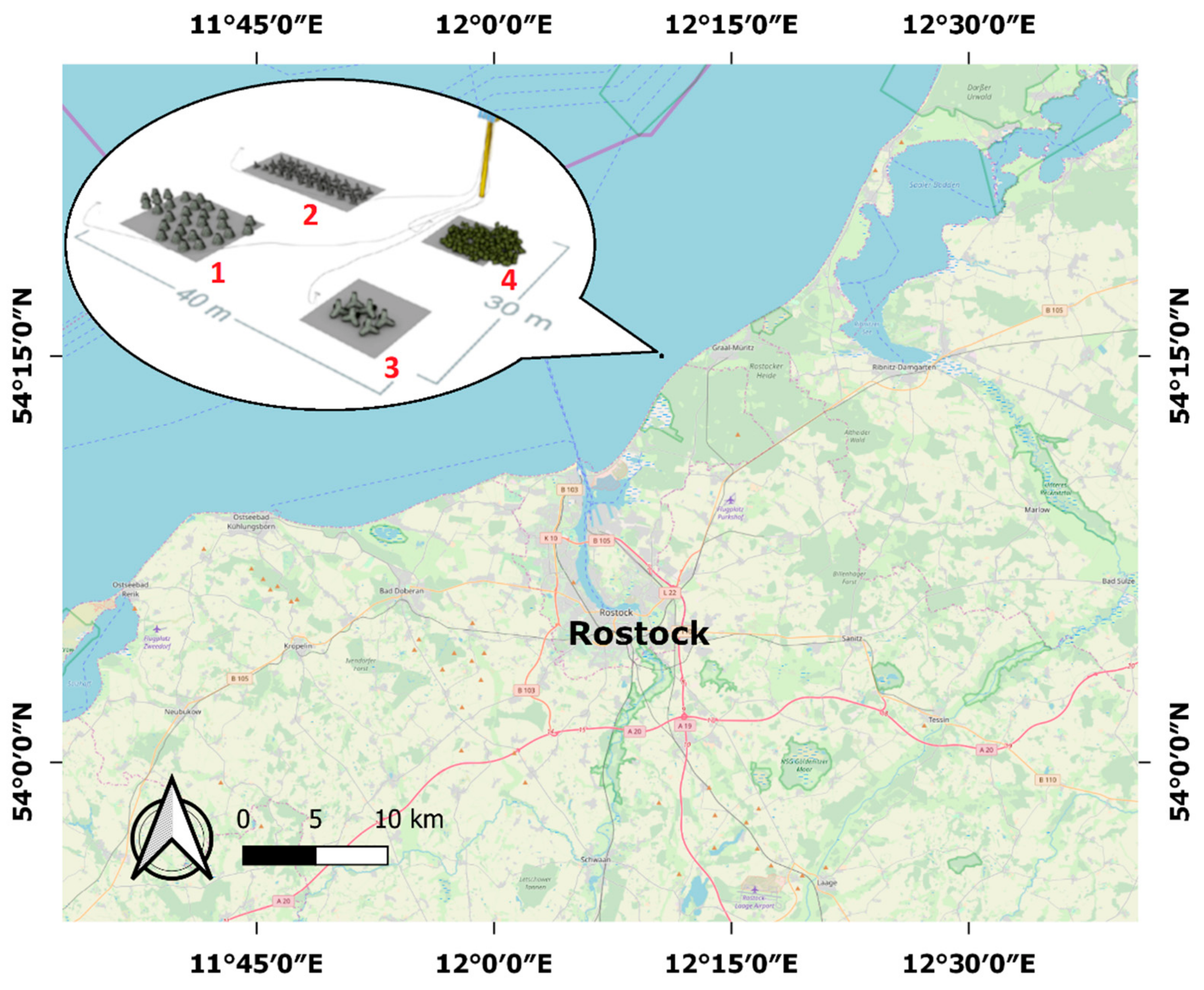
2.1. Test Object
- 30 cut concrete cones,
- 50 two-ton concrete tetrapods,
- 6 six-ton concrete tetrapods,
- 180 tons of stone.
2.2. Methodology
- α—wave amplitude,
- μ—position,
- σ—standard deviation,
- t—time/sample.
- N—number of Gaussian components,
- αi—amplitude of i-th component,
- μi—position of i-th component,
- σi—standard deviation of i-th component.
- WR(t)—received wave,
- N—number of Gaussian components,
- αi—amplitude of i-th component,
- μi—position of i-th component,
- σi—standard deviation of i-th component.
3. Results
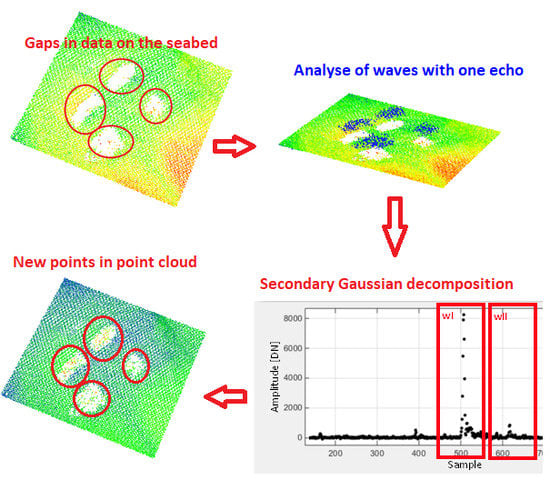
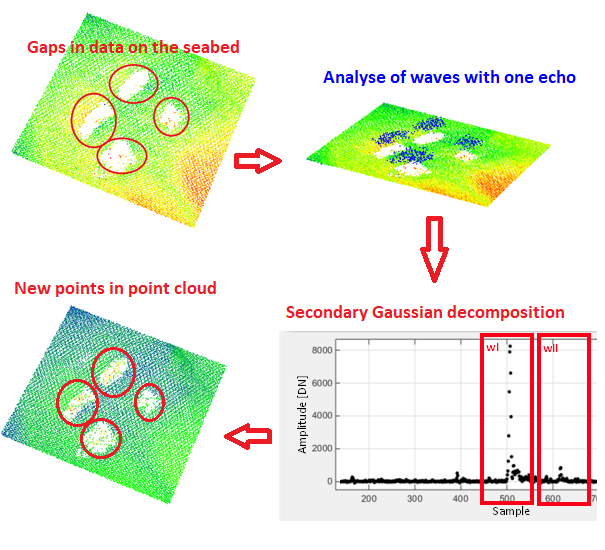
3.1. Secondary Analysis of Airborne Laser Bathymetry (ALB) Full Waveform
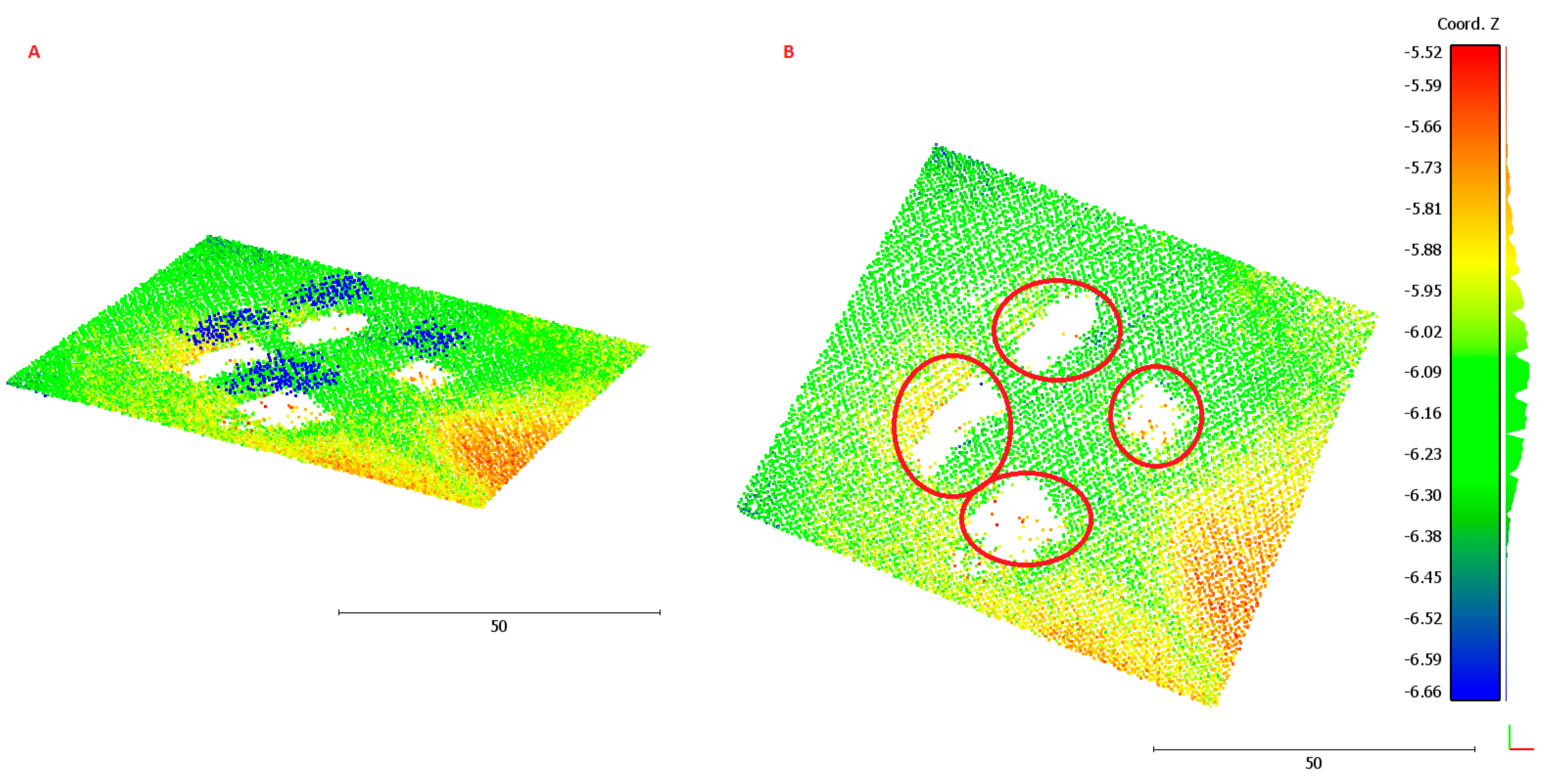
3.2. Validation of New Points
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Farr, H.K. Multibeam bathymetric sonar: Sea beam and hydro chart. Mar. Geod. 1980, 4, 77–93. [Google Scholar] [CrossRef]
- Leatherdale, J.D.; John Turner, D. Operational experience in underwater photogrammetry. ISPRS J. Photogramm. Remote Sens. 1991, 46, 104–112. [Google Scholar] [CrossRef]
- Drap, P. Underwater Photogrammetry for Archaeology. Spec. Appl. Photogramm. 2012. [Google Scholar]
- Mandlburger, G. A case study on through-water dense image matching. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Riva del Garda, Italy, 4–7 June 2018; Copernicus Gmbh: Göttingen, Germany, 2018; Volume XLII–2, pp. 659–666. Available online: https://doi.org/10.5194/isprs-archives-XLII-2-659-2018 (accessed on 20 May 2019).
- Mandlburger, G.; Kremer, J.; Steinbacher, D.; Baran, R. Investigating the use of coastal blue imagery for bathymetric mapping of inland water bodies. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII–1, 275–282. [Google Scholar] [CrossRef]
- Steinbacher, F.; Pfennigbauer, M.; Aufleger, M. Airborne hydromapping area-wide surveying of shallow water areas. In River Flow; Dittrich, A., Koll, K., Aberle, J., Geisenhainer, P., Eds.; Bundesanstalt für Wasserbau: Karlsruhe, Germany, 2010; pp. 1709–1714. Available online: https://hdl.handle.net/20.500.11970/99833 (accessed on 20 May 2019).
- Niemeyer, J.; Kogut, T.; Heipke, C. Airborne Laser Bathymetry for Monitoring the German Baltic Sea Coast. In Proceedings of the Annual Conference of the German Society for Photogrammetry, Remote Sensing and Geoinformation, Nottingham, UK, 1–5 September 2014. [Google Scholar]
- Hickman, G.D.; Hogg, J.E. Application of an airborne pulsed laser for near shore bathymetric measurements. Remote Sens. Environ. 1969, 1, 47–58. [Google Scholar] [CrossRef]
- Bakuła, K. Multispectral airborne laser scanning—A new trend in the development of LiDAR technology. Archiwum Fotogrametrii Kartografii i Teledetekcji 2015, 27, 25–41. [Google Scholar]
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing near water surface penetration in laser bathymetry—A case study at the River Pielach. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 175–180. [Google Scholar] [CrossRef]
- Wang, C.; Li, Q.; Liu, Y.; Wu, G.; Liu, P.; Ding, X. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS J. Photogramm. Remote Sens. 2006, 60, 100–112. [Google Scholar] [CrossRef]
- Guo, K.; Xu, W.; Liu, Y.; He, X.; Tian, Z. Gaussian Half-Wavelength Progressive Decomposition Method for Waveform Processing of Airborne Laser Bathymetry. Remote Sens. 2017, 10, 35. [Google Scholar] [CrossRef]
- Wagner, W.; Ulrich, A.; Melzer, T.; Briese, C.; Kraus, K. From single-pulse to full-waveform airborne laser scanners: Potential and practical challenges. Int. Arch. Photogramm. Remote Sens. Geoinf. Sci. 2004, 35, 414–419. [Google Scholar]
- Chauve, A.; Mallet, C.; Bretar, F.; Durrieu, S.; Deseilligny, M.P.; Puech, W. Processing Full-waveform Lidar Data: Modelling Raw Signals. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, XL-5, 102–107. [Google Scholar]
- Abdallah, H.; Bailly, J.; Baghdadi, N.N.; Saint-Geours, N.; Fabre, F. Potential of Space-Borne LiDAR Sensors for Global Bathymetry in Coastal and Inland Waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 202–216. [Google Scholar] [CrossRef]
- Abady, L.; Bailly, J.; Baghdadi, N.; Pastol, Y.; Abdallah, H. Assessment of Quadrilateral Fitting of the Water Column Contribution in Lidar Waveforms on Bathymetry Estimates. IEEE Geosci. Remote Sens. Lett. 2014, 11, 813–817. [Google Scholar] [CrossRef]
- Ding, K.; Li, Q.; Zhu, J.; Wang, C.; Guan, M.; Chen, Z.; Yang, C.; Cui, Y.; Liao, J. An Improved Quadrilateral Fitting Algorithm for the Water Column Contribution in Airborne Bathymetric Lidar Waveforms. Sensors 2018, 18, 552. [Google Scholar] [CrossRef]
- Wang, C.; Tang, F.; Li, L.; Li, G.; Cheng, F.; Xi, X. Wavelet Analysis for ICESat/GLAS Waveform Decomposition and Its Application in Average Tree Height Estimation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 115–119. [Google Scholar] [CrossRef]
- Jutzi, B.; Stilla, U. Range determination with waveform recording laser systems using a Wiener Filter. ISPRS J. Photogramm. Remote Sens. 2006, 61, 95–107. [Google Scholar] [CrossRef]
- Wu, J.; van Aardt, J.A.N.; Asner, G.P. A Comparison of Signal Deconvolution Algorithms Based on Small-Footprint LiDAR Waveform Simulation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2402–2414. [Google Scholar] [CrossRef]
- Parrish, C.; Jeong, I.; Nowak, R.D.; Brent Smith, R. Empirical Comparison of Full-Waveform Lidar Algorithms: Range Extraction and Discrimination Performance. Photogramm. Eng. Remote Sens. 2011, 77, 825–838. [Google Scholar] [CrossRef]
- Schwarz, R.; Pfeifer, N.; Pfennigbauer, M.; Ullrich, A. Exponential Decomposition with Implicit Deconvolution of Lidar Backscatter from the Water Column. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 159–167. [Google Scholar] [CrossRef]
- Johnstone, I.M.; Kerkyacharian, G.; Picard, D.; Raimondo, M. Wavelet Deconvolution in a Periodic Setting. J. R. Stat. Soc. Ser. B Stat. Methodol. 2004, 66, 547–573. [Google Scholar] [CrossRef]
- Duchesne, M.; Bellefleur, G.; Galbraith, M.; Kolesar, R.; Kuzmiski, R. Strategies for waveform processing in sparker data. Mar. Geophys. Res. 2007, 28, 153–164. [Google Scholar] [CrossRef]
- Pan, Z.; Glennie, C.; Hartzell, P.; Fernandez-Diaz, J.; Legleiter, C.; Overstreet, B. Performance Assessment of High Resolution Airborne Full Waveform LiDAR for Shallow River Bathymetry. Remote Sens. 2015, 7, 5133–5159. [Google Scholar] [CrossRef]
- Quadros, N. Unlocking the Characteristics of Bathymetric LiDAR Sensors. LiDAR Mag. 2013, 3, 62–67. [Google Scholar]
- Savchuk, O.P.; Larsson, U.; Elmgren, R.; Rodriguez Medina, M. Secchi depth and nutrient concentrations in the Baltic Sea: Model regressions for MARE’s NEST. Tech. Rep. 2006, 11. Available online: https://www.researchgate.net/publication/242496034_Secchi_depth_and_nutrient_concentrations_in_the_Baltic_Sea_model_regressions_for_MARE’s_NEST (accessed on 20 May 2019).
- LiDAR Survey Studio. User Manual; Airborne Hydrography AB: Jönköping, Sweden, 2013. [Google Scholar]
- Allouis, T.; Bailly, J.-S.; Pastol, Y.; Le Roux, C. Comparison of LiDAR Waveform Processing Methods for Very Shallow Water Bathymetry Using Raman, Near-Infrared and Green Signals. Earth Surf. Proc. Landf. 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Hofton, M.A.; Minster, J.B.; Blair, J.B. Decomposition of laser altimeter waveforms. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1989–1996. [Google Scholar] [CrossRef]
- Bretar, F.; Chauve, A.; Mallet, C.; Jutzi, B. Managing full waveform LiDAR data: A challenging task for the forthcoming years. XXI Congr. 2008, 37. part-B. [Google Scholar]
- Levenberg, K. A method for the solution of certain non-linear problems in least squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef]
- Marquardt, D. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Mallet, C.; Soergel, U.; Bretar, F. Analysis of full-waveform Lidar data for classification of urban. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 5, 337–349. [Google Scholar]
- Molnar, B.; Laky, S.; Toth, C. Using full waveform data in urban areas. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XXXVIII-3/W22, 203–208. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Airborne Laser Bathymetry (ALB) Data Processing/Object Number | 1 (30 Cut Concrete Cones) | 2 (50 Two-Ton Concrete Tetrapods) | 3 (6 Six-Ton Concrete Tetrapods) | 4 (180 Tons of Stone) | |
|---|---|---|---|---|---|
| Number of points in point clouds | preliminary processing | 19 | 28 | 12 | 41 |
| secondary analysis | 97 | 40 | 77 | 101 | |
| Change [%] | 411 | 43 | 542 | 146 | |
| Density of point cloud on the objects [pts/m2] | preliminary processing | 0.18 | 0.4 | 0.13 | 0.30 |
| secondary analysis | 0.91 | 0.57 | 0.82 | 0.74 | |
| Change [%] | 406 | 43 | 531 | 147 | |
| Mean value of vertical error for surface model of objects [m] | preliminary processing | −0.19 | −0.39 | −0.11 | −0.41 |
| secondary analysis | −0.11 | −0.12 | −0.10 | −0.07 | |
| Difference | 0.08 | 0.27 | 0.01 | 0.34 | |
| Standard deviation of vertical error for surface model of objects [m] | preliminary processing | 0.19 | 0.37 | 0.15 | 0.45 |
| secondary analysis | 0.24 | 0.32 | 0.21 | 0.28 | |
| Difference | 0.05 | −0.05 | 0.06 | −0.17 | |
| Root Mean Square Error (RMSE) for surface model of objects [m] | preliminary processing | 0.27 | 0.54 | 0.18 | 0.61 |
| secondary analysis | 0.26 | 0.34 | 0.23 | 0.29 | |
| Difference | −0.01 | −0.20 | 0.05 | −0.32 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kogut, T.; Bakuła, K. Improvement of Full Waveform Airborne Laser Bathymetry Data Processing based on Waves of Neighborhood Points. Remote Sens. 2019, 11, 1255. https://doi.org/10.3390/rs11101255
Kogut T, Bakuła K. Improvement of Full Waveform Airborne Laser Bathymetry Data Processing based on Waves of Neighborhood Points. Remote Sensing. 2019; 11(10):1255. https://doi.org/10.3390/rs11101255
Chicago/Turabian StyleKogut, Tomasz, and Krzysztof Bakuła. 2019. "Improvement of Full Waveform Airborne Laser Bathymetry Data Processing based on Waves of Neighborhood Points" Remote Sensing 11, no. 10: 1255. https://doi.org/10.3390/rs11101255
APA StyleKogut, T., & Bakuła, K. (2019). Improvement of Full Waveform Airborne Laser Bathymetry Data Processing based on Waves of Neighborhood Points. Remote Sensing, 11(10), 1255. https://doi.org/10.3390/rs11101255