Operational Framework for Rapid, Very-high Resolution Mapping of Glacial Geomorphology Using Low-cost Unmanned Aerial Vehicles and Structure-from-Motion Approach

 ,
,
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
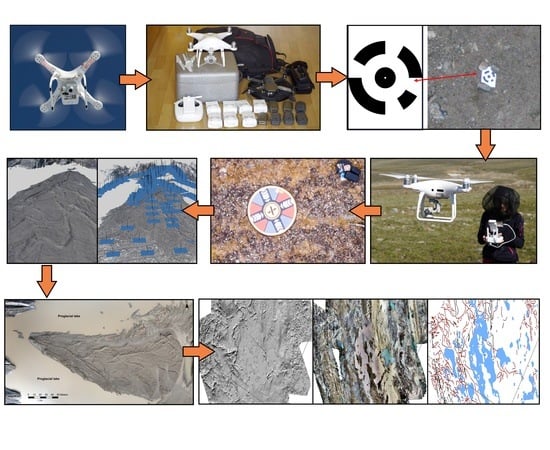
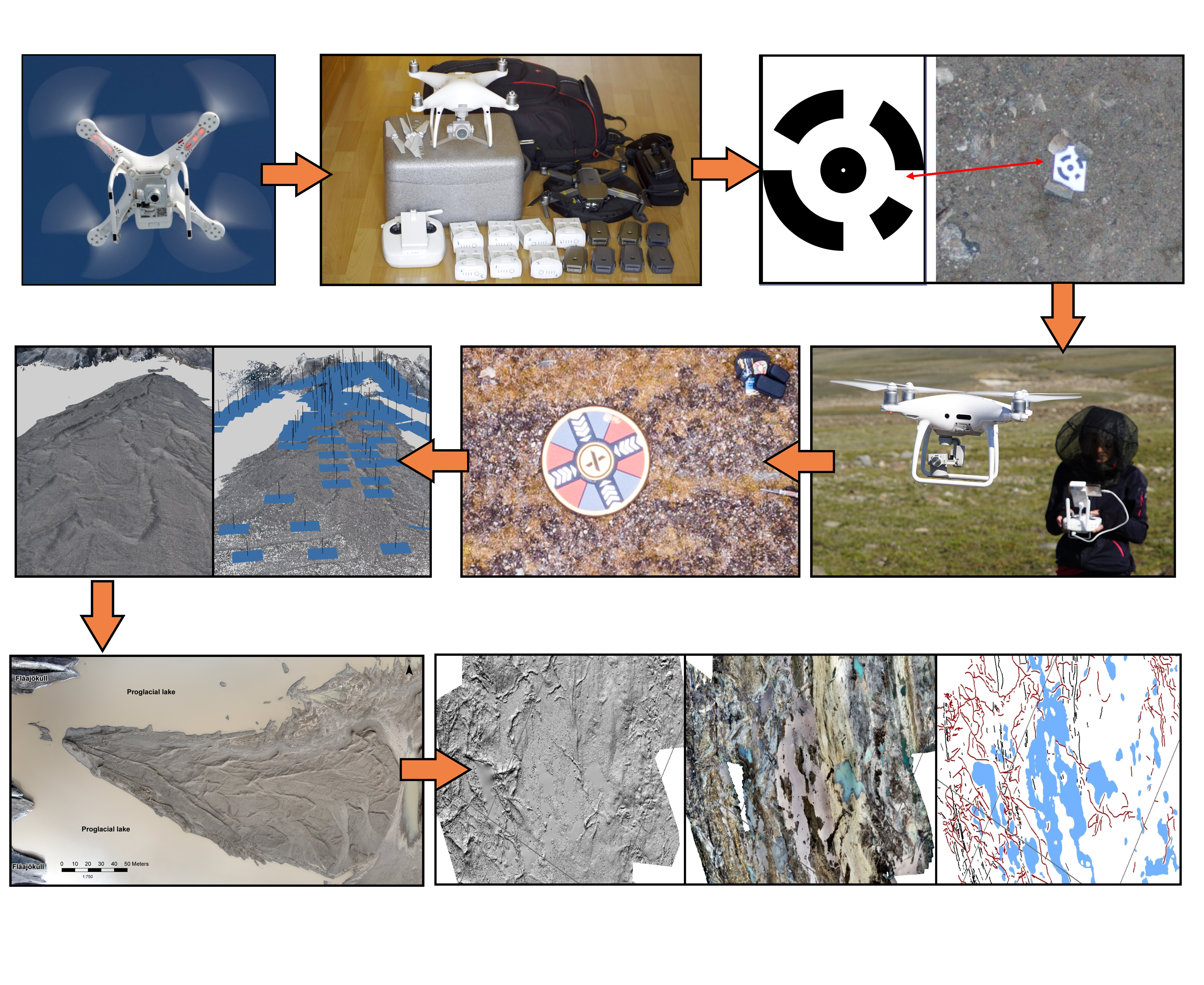
2. Operational Framework for Rapid Mapping and Monitoring of Proglacial Areas
2.1. Stage 1—Preparation and Selection of the Appropriate Platform
- Size of the study area.
- Target product (orthomosaic/digital elevation model (DEM)/3D model) and its required GSD.
- Accessibility of the terrain to be mapped, including type of available transport to and within the study area (by car, by boat, on foot, etc.) and accessibility of the power sources.
- Character of the study: One-time mapping vs. regular monitoring.
- Typical lighting condition.
- Typical weather conditions, including temperature, precipitation, and wind regimes.
- National and local regulation, which might exclude certain types of platforms or missions.
- Technical prerequisites of allowed UAV such as weight, fail-safe systems, range.
- Types of allowed missions, e.g., allowing only VLOS (visual line of sight) operations.
- Non-fly zones related to airports, heliports, military areas, urban areas, conservation areas, etc.
- Administrative measures, e.g., notification to local aviation authorities and need for permission from land-owners.
- UAV-personnel requirements, limiting the use of UAV to certified operators.
2.2. Stage 2—Transport
2.3. Stage 3—Preliminary on-Site Activities (Including Optional Ground-Control-Point Collection)
- Surveying natural, characteristic points like boulders—the advantage of such an approach is that it is not necessary to distribute the artificial targets before flights (i.e., surveys can be done after flying as well). The drawback is that the natural feature will usually have less obvious center points, which will introduce greater errors in the processing stage.
- Artificial targets (like laminated printed targets) ought to be distributed over the study area, before flying (survey can be done before or after), and collected after completing the flying mission. The advantage is that they are often more easily recognizable on the captured images.
2.4. Stage 4—Pre-flight Setup and Checks
- Removing all transport protection elements.
- Preparation of the UAV (e.g., mounting of propellers).
- Connection of the remote controller and the ground station.
- Checking the condition of the UAV (for any damage during transport).
- Turning on the remote controller before turning on the UAV.
- Checking the sensors’ reading if available (accelerometer, magnetometer, gyroscope, etc.). If they do not behave in a normal way, calibration is necessary, especially when flying over a new area.
- Checking the fail-safe settings, such as return-to-home (RTH) altitude (i.e., it should be set up higher than the highest obstacles) and the home-point location.
- Checking the camera settings, including the shutter speed and interval (in case of automatic shutting). Depending on lighting condition and type of platform (multi-rotors with the ability to hover versus planes), an ISO (i.e. determination of exposure index, ISO speed ratings, standard output sensitivity, and recommended exposure index: International Organization for Standardization - ISO 12232:2006) adjustment might be necessary to avoid blurred photos.
2.5. Stage 5—Conducting the Mission
- If the surveyed area is relatively flat and characterized by low relief, vertical (nadir) imagery will be sufficient in most cases (especially if an orthomosaic is the only required product).
- If the relief is more complicated, additional oblique images are recommended; or, in case of the vertical rock or ice-cliffs, horizontal images are recommended to ensure proper representation of the steep terrain sections.
- Images should be taken with a large overlap (>80%). It can be done (1) manually, (2) in preprogrammed time intervals, or (3) in preprogrammed locations—depending on the operator experience and availability of the mission planning software.
- Note that, at a high altitude, due to the low air pressure, flying times will be different and, in most cases, the automatic battery level indicator will not work properly (however, there is a potential to modify some elements of the UAV’s design, to compensate for the high altitude e.g., [40]).
- Note that, in low temperature conditions, the performance of the batteries is limited.
2.6. Stage 6—Data Processing
2.7. Stage 7—Mapping and Change Detection
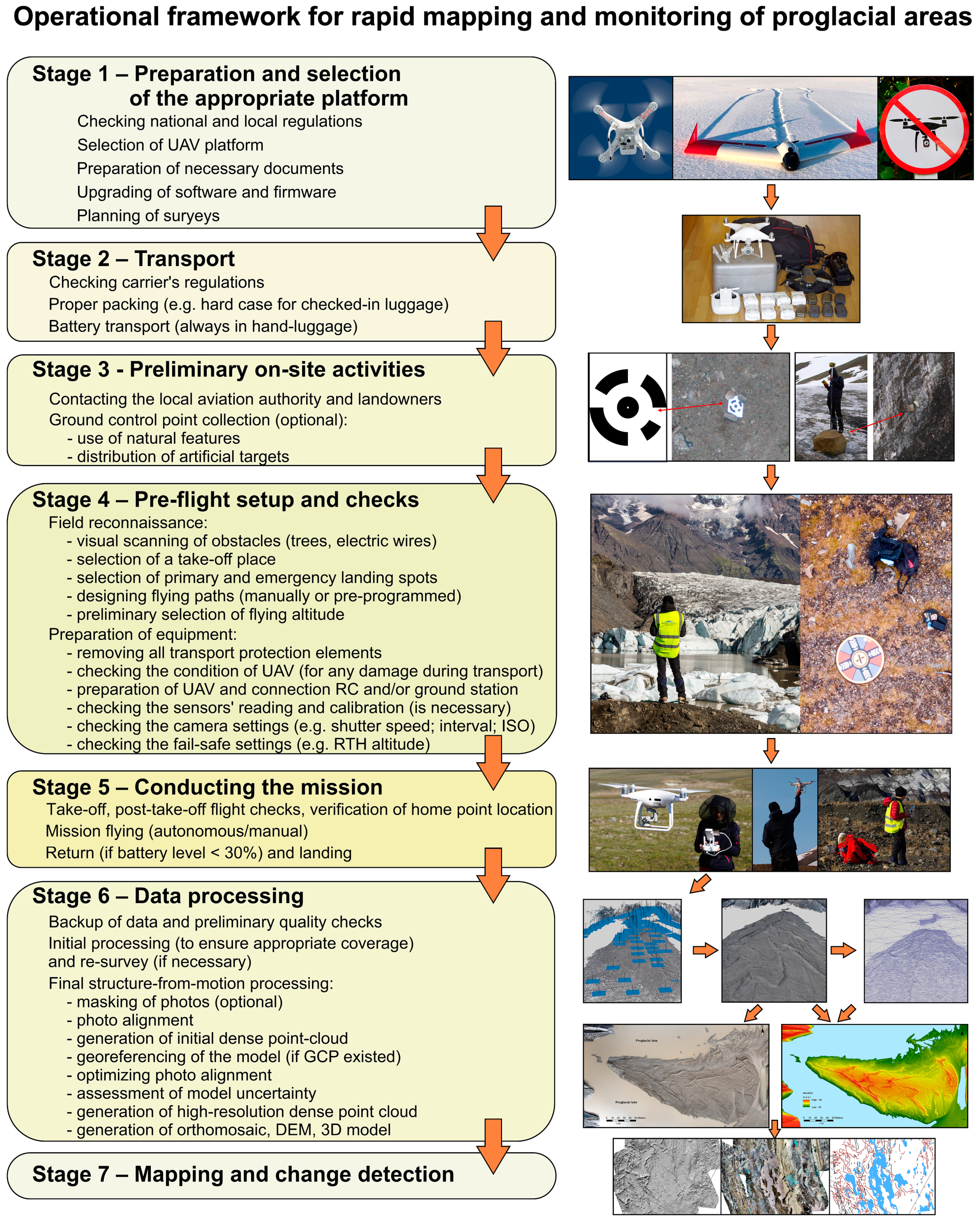
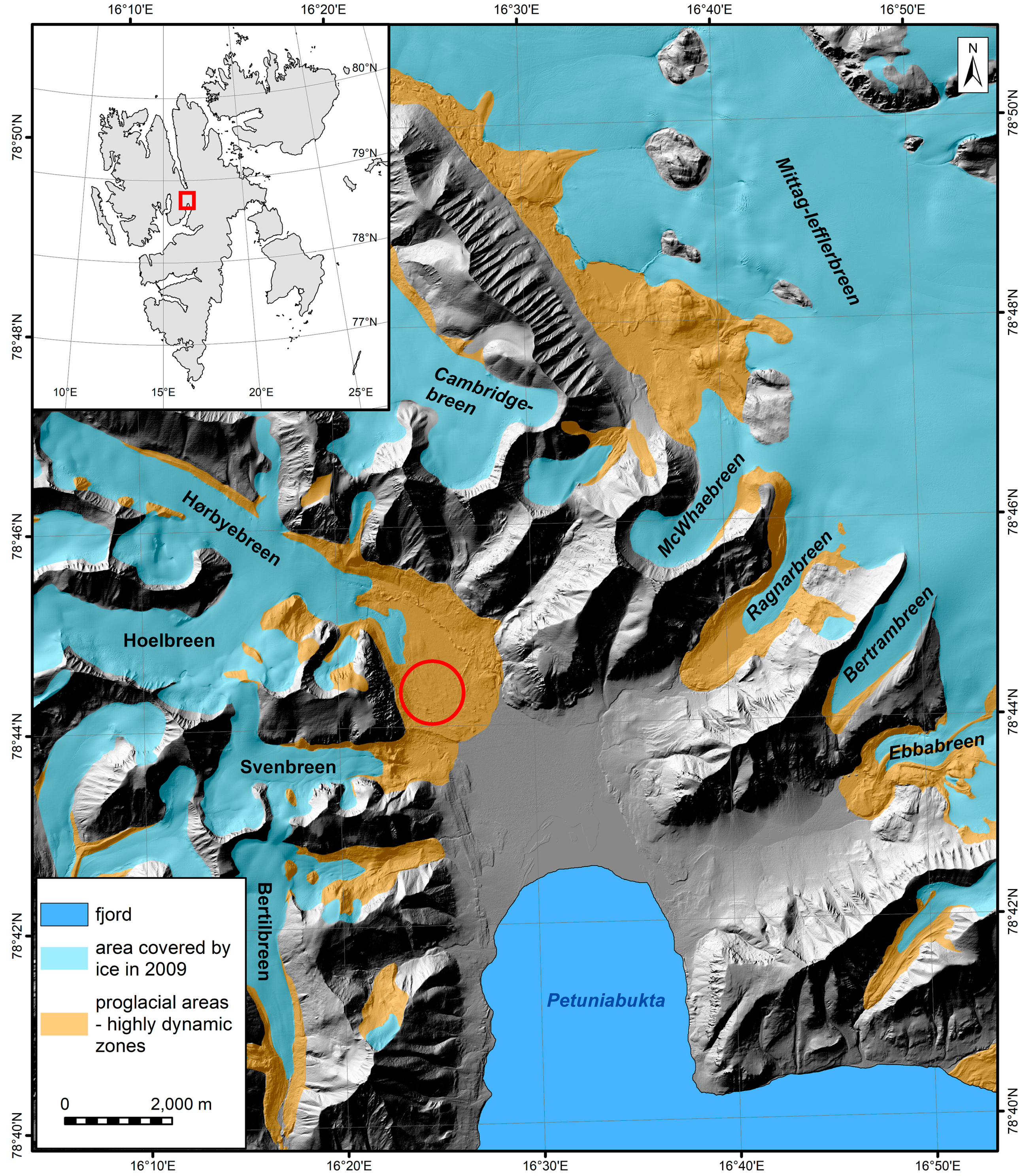
3. Implementation of the Proposed Framework—Study Area, Platform, and Methods
3.1. Choosing the Appropriate Platform, Preparation, and Transport
- Our study area was relatively small (~1 km2), although not easily accessible; reaching the survey area required traveling by plane and boat, and then more than three hours of hiking over the rugged terrain.
- The use of motorized vehicles was prohibited so all equipment had to be carried on foot.
- Svalbard is usually cloudy, so lighting was unfavorable for taking photography.
- Surveys were planned for the summer months, with temperatures between 0 and 5 °C, and often in windy conditions.
- The UAV regulation on the Svalbard generally follows the Norwegian regulations; i.e., to perform VLOS flights it was necessary to register as an RO1 operator.
3.2. Preliminary on-Site Activities
3.3. Pre-flight Setup, Checks, and the Flying Mission
3.4. Data Processing and Analysis
- Photo alignment—accuracy of alignment was set to high, with both generic and reference preselections of images checked. Key point and tie-point limits were set at 40,000 and 4,000, respectively.
- Optimization of the camera parameters was performed to fit the generated tie-points to the ground control points measured with the dGPS. UTM 33N was used as a coordinating system. Thirty points were used as the ground control points, for georeferencing of the model and optimization of a dense-point cloud. The remaining 15 points were used as checkpoints to assess the general accuracy of the final model.
- Extraction of the dense-point cloud was performed at a medium resolution and an aggressive depth-filtering mode.
- DEM (7.9 cm GSD) was generated on the basis of the dense-point cloud.
- Orthomosaic (1.9 cm GSD) was generated on the basis of the DEM surface and in a mosaic-blending mode, with the optional hole-filling mode being checked.
4. Results and Analysis
4.1. Initial Photo Alignment and Establishing Internal Orientation
4.2. DEM and the Orthomosaic Generation
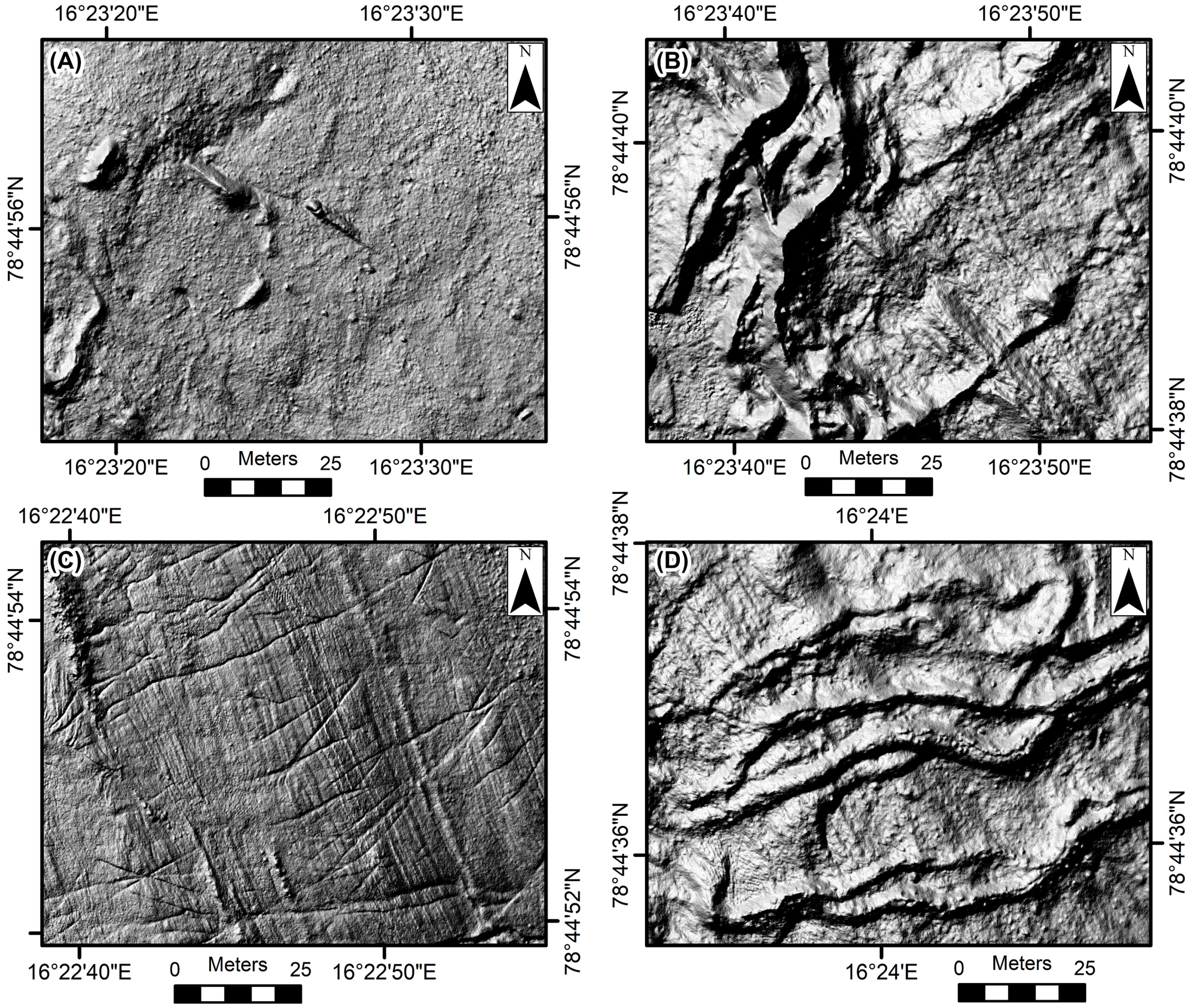
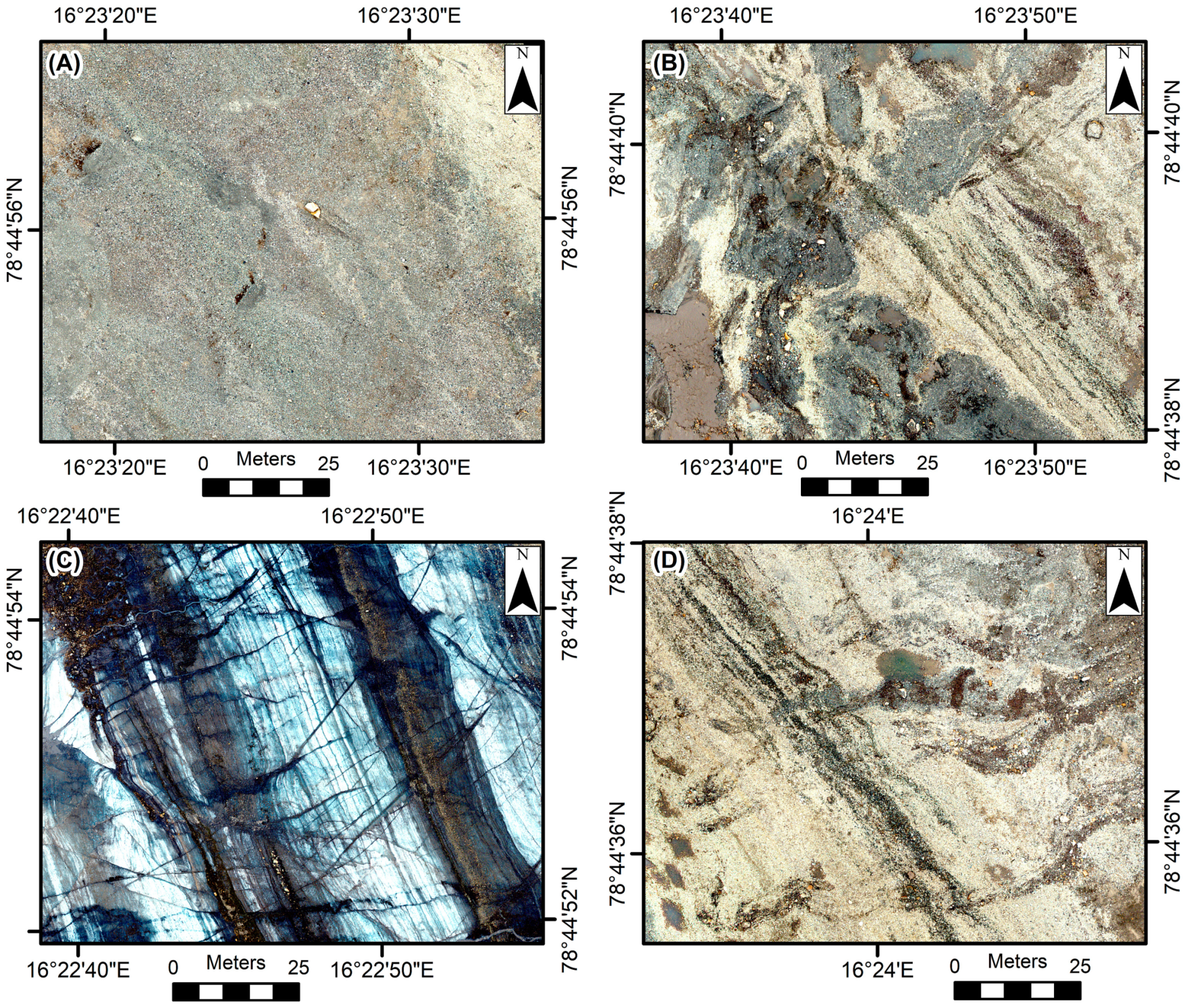
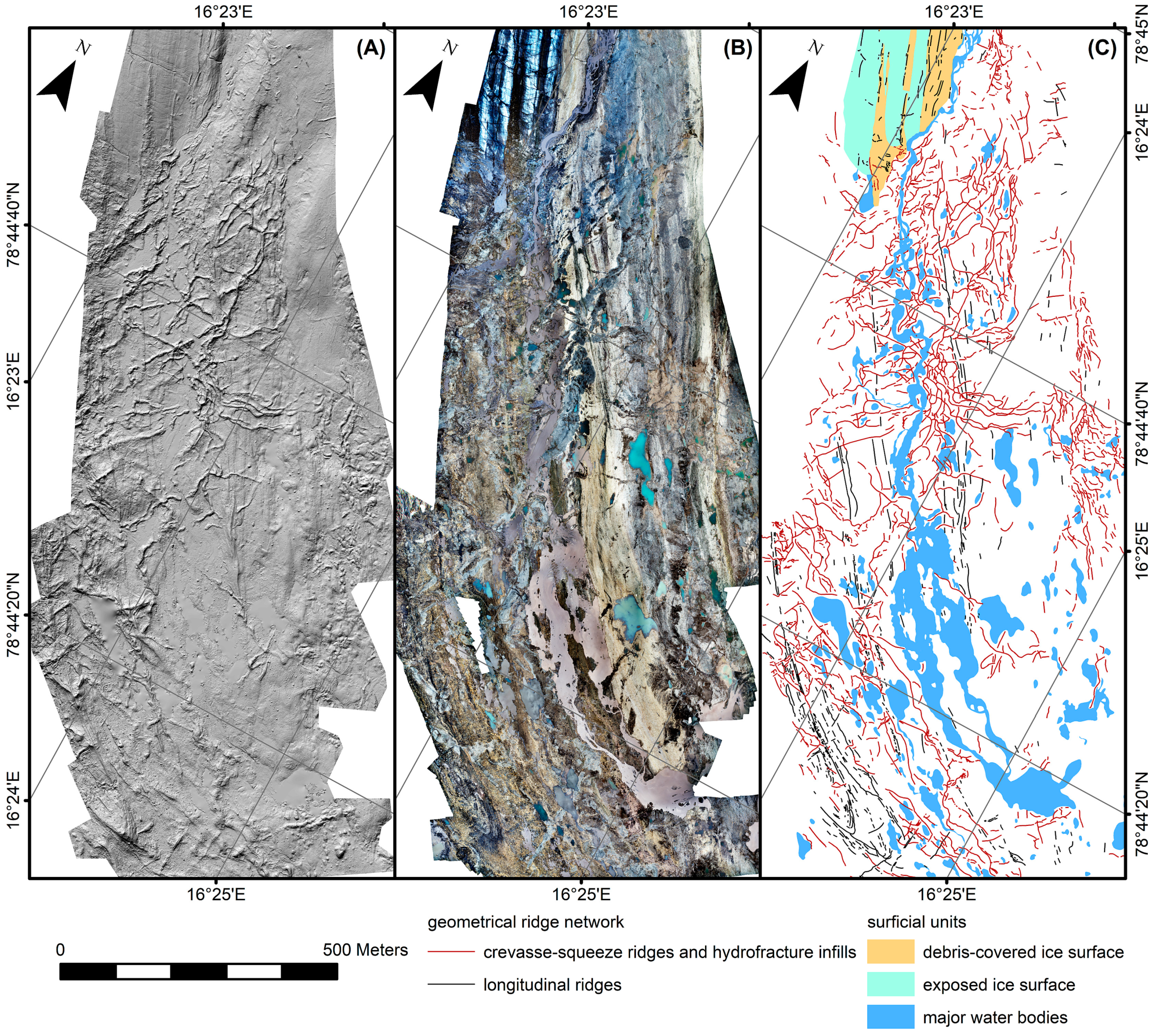
4.3. The Mapping of Subtle Glacial Landforms
5. Discussion
5.1. Design and Implementation of the Proposed Framework
5.2. Application of the UAV and the SfM in Glacial Geomorphology Mapping
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Benn, D.I.; Evans, D.J.A. Glaciers and Glaciation; Hodder Education: London, UK, 2010. [Google Scholar]
- Ewertowski, M.W.; Tomczyk, A.M. Quantification of the ice-cored moraines’ short-term dynamics in the high-Arctic glaciers Ebbabreen and Ragnarbreen, Petuniabukta, Svalbard. Geomorphology 2015, 234, 211–227. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Heckmann, T. Short-term geomorphological evolution of proglacial systems. Geomorphology 2017, 287, 3–28. [Google Scholar] [CrossRef]
- Ewertowski, M.W.; Evans, D.J.A.; Roberts, D.H.; Tomczyk, A.M.; Ewertowski, W.; Pleksot, K. Quantification of historical landscape change on the foreland of a receding polythermal glacier, Hørbyebreen, Svalbard. Geomorphology 2019, 325, 40–54. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G.; Graham, D.J.; Labadz, J.C. The potential of small unmanned aircraft systems and structure-from-motion for topographic surveys: A test of emerging integrated approaches at Cwm Idwal, North Wales. Geomorphology 2014, 226, 35–43. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. Earth Environ. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Akanksha; Martín-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Rippin, D.M.; Pomfret, A.; King, N. High resolution mapping of supra-glacial drainage pathways reveals link between micro-channel drainage density, surface roughness and surface reflectance. Earth Surf. Proc. Land 2015, 40, 1279–1290. [Google Scholar] [CrossRef]
- Ryan, J.C.; Hubbard, A.L.; Box, J.E.; Todd, J.; Christoffersen, P.; Carr, J.R.; Holt, T.O.; Snooke, N. UAV photogrammetry and structure from motion to assess calving dynamics at Store Glacier, a large outlet draining the Greenland ice sheet. Cryosphere 2015, 9, 1–11. [Google Scholar] [CrossRef]
- Fugazza, D.; Scaioni, M.; Corti, M.; D’Agata, C.; Azzoni, R.S.; Cernuschi, M.; Smiraglia, C.; Diolaiuti, G.A. Combination of UAV and terrestrial photogrammetry to assess rapid glacier evolution and map glacier hazards. Nat. Hazards Earth Syst. Sci. 2018, 18, 1055–1071. [Google Scholar] [CrossRef]
- Dąbski, M.; Zmarz, A.; Pabjanek, P.; Korczak-Abshire, M.; Karsznia, I.; Chwedorzewska, K.J. UAV-based detection and spatial analyses of periglacial landforms on Demay Point (King George Island, South Shetland Islands, Antarctica). Geomorphology 2017, 290, 29–38. [Google Scholar] [CrossRef]
- Kraaijenbrink, P.D.A.; Shea, J.M.; Pellicciotti, F.; Jong, S.M.d.; Immerzeel, W.W. Object-based analysis of unmanned aerial vehicle imagery to map and characterise surface features on a debris-covered glacier. Remote Sens. Environ. 2016, 186, 581–595. [Google Scholar] [CrossRef]
- Bernard, É.; Friedt, J.M.; Tolle, F.; Marlin, C.; Griselin, M. Using a small COTS UAV to quantify moraine dynamics induced by climate shift in Arctic environments. Int. J. Remote Sens. 2016, 38, 2480–2494. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; de Jong, S.M. Time Series Analysis of Landslide Dynamics Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Kasprzak, M.; Jancewicz, K.; Michniewicz, A. UAV and SfM in Detailed Geomorphological Mapping of Granite Tors: An Example of Starościńskie Skały (Sudetes, SW Poland). Pure Appl. Geophys. 2018, 175, 3193–3207. [Google Scholar] [CrossRef]
- Rossini, M.; Di Mauro, B.; Garzonio, R.; Baccolo, G.; Cavallini, G.; Mattavelli, M.; De Amicis, M.; Colombo, R. Rapid melting dynamics of an alpine glacier with repeated UAV photogrammetry. Geomorphology 2018, 304, 159–172. [Google Scholar] [CrossRef]
- Chandler, B.M.P.; Evans, D.J.A.; Roberts, D.H.; Ewertowski, M.W.; Clayton, A.I. Glacial geomorphology of the Skálafellsjökull foreland, Iceland: A case study of ‘annual’moraines. J. Maps 2016, 12, 904–916. [Google Scholar] [CrossRef]
- Evans, D.J.A.; Ewertowski, M.; Orton, C. Fláajökull (north lobe), Iceland: Active temperate piedmont lobe glacial landsystem. J. Maps 2016, 12, 777–789. [Google Scholar] [CrossRef]
- Ewertowski, M.W.; Evans, D.J.A.; Roberts, D.H.; Tomczyk, A.M. Glacial geomorphology of the terrestrial margins of the tidewater glacier, Nordenskiöldbreen, Svalbard. J. Maps 2016, 12, 476–487. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.; Cook, S.J.; Graham, D.J. Ice-cored moraine degradation mapped and quantified using an unmanned aerial vehicle: A case study from a polythermal glacier in Svalbard. Geomorphology 2016, 258, 1–10. [Google Scholar] [CrossRef]
- Westoby, M.J.; Dunning, S.A.; Woodward, J.; Hein, A.S.; Marrero, S.M.; Winter, K.; Sugden, D.E. Sedimentological characterization of Antarctic moraines using UAVs and Structure-from-Motion photogrammetry. J. Glaciol. 2017, 61, 1088–1102. [Google Scholar] [CrossRef]
- Wigmore, O.; Mark, B. Monitoring tropical debris-covered glacier dynamics from high-resolution unmanned aerial vehicle photogrammetry, Cordillera Blanca, Peru. Cryosphere 2017, 11, 2463–2480. [Google Scholar] [CrossRef]
- Allaart, L.; Friis, N.; Ingólfsson, Ó.; Håkansson, L.; Noormets, R.; Farnsworth, W.R.; Mertes, J.; Schomacker, A. Drumlins in the Nordenskiöldbreen forefield, Svalbard. GFF 2018, 140, 170–188. [Google Scholar] [CrossRef]
- Midgley, N.G.; Tonkin, T.N.; Graham, D.J.; Cook, S.J. Evolution of high-Arctic glacial landforms during deglaciation. Geomorphology 2018, 311, 63–75. [Google Scholar] [CrossRef]
- Ely, J.C.; Graham, C.; Barr, I.D.; Rea, B.R.; Spagnolo, M.; Evans, J. Using UAV acquired photography and structure from motion techniques for studying glacier landforms: Application to the glacial flutes at Isfallsglaciären. Earth Surf. Proc. Landf. 2017, 42, 877–888. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Proc. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Proc. Landf. 2017, 42, 473–486. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- O’Connor, J.; Smith, M.J.; James, M.R. Cameras and settings for aerial surveys in the geosciences: Optimising image data. Prog. Phys. Geogr. Earth Environ. 2017, 41, 325–344. [Google Scholar] [CrossRef]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Cimoli, E.; Marcer, M.; Vandecrux, B.; Boggild, C.E.; Williams, G.; Simonsen, S.B. Application of Low-Cost UASs and Digital Photogrammetry for High-Resolution Snow Depth Mapping in the Arctic. Remote Sens. 2017, 9, 1144. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry—Merits, limits and developments. Earth Surf. Dynam. 2016, 4, 359–389. [Google Scholar] [CrossRef]
- Rusnák, M.; Sládek, J.; Kidová, A.; Lehotský, M. Template for high-resolution river landscape mapping using UAV technology. Measurement 2018, 115, 139–151. [Google Scholar] [CrossRef]
- Stocker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Available online: http://www.iata.org/whatwedo/cargo/dgr/Pages/lithium-batteries.aspx (accessed on 1 December 2018).
- Tonkin, T.; Midgley, N. Ground-Control Networks for Image Based Surface Reconstruction: An Investigation of Optimum Survey Designs Using UAV Derived Imagery and Structure-from-Motion Photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef]
- Sieberth, T.; Wackrow, R.; Chandler, J.H. Automatic detection of blurred images in UAV image sets. ISPRS J. Photogramm. Remote Sens. 2016, 122, 1–16. [Google Scholar] [CrossRef]
- Chandler, B.M.P.; Lovell, H.; Boston, C.M.; Lukas, S.; Barr, I.D.; Benediktsson, Í.Ö.; Benn, D.I.; Clark, C.D.; Darvill, C.M.; Evans, D.J.A.; et al. Glacial geomorphological mapping: A review of approaches and frameworks for best practice. Earth-Sci. Rev. 2018, 185, 806–846. [Google Scholar] [CrossRef]
- Nuth, C.; Kääb, A. Co-registration and bias corrections of satellite elevation data sets for quantifying glacier thickness change. Cryosphere 2011, 5, 271–290. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Proc. Landf. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; de Jong, S.M. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Hendrickx, H.; Vivero, S.; De Cock, L.; De Wit, B.; De Maeyer, P.; Lambiel, C.; Delaloye, R.; Nyssen, J.; Frankl, A. The reproducibility of SfM algorithms to produce detailed Digital Surface Models: The example of PhotoScan applied to a high-alpine rock glacier. Remote Sens. Lett. 2019, 10, 11–20. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Smith, M.W.; Vericat, D. From experimental plots to experimental landscapes: Topography, erosion and deposition in sub-humid badlands from Structure-from-Motion photogrammetry. Earth Surf. Proc. Landf. 2015, 40, 1656–1671. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Wallace, L. Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Trans. Geosci. Remote 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Anderson, K.; DeBell, L.; Duffy, J.P. A UK Civil Aviation Authority (CAA)-approved operations manual for safe deployment of lightweight drones in research. Int. J. Remote Sens. 2017, 38, 2737–2744. [Google Scholar] [CrossRef]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ewertowski, M.W.; Tomczyk, A.M.; Evans, D.J.A.; Roberts, D.H.; Ewertowski, W. Operational Framework for Rapid, Very-high Resolution Mapping of Glacial Geomorphology Using Low-cost Unmanned Aerial Vehicles and Structure-from-Motion Approach. Remote Sens. 2019, 11, 65. https://doi.org/10.3390/rs11010065
Ewertowski MW, Tomczyk AM, Evans DJA, Roberts DH, Ewertowski W. Operational Framework for Rapid, Very-high Resolution Mapping of Glacial Geomorphology Using Low-cost Unmanned Aerial Vehicles and Structure-from-Motion Approach. Remote Sensing. 2019; 11(1):65. https://doi.org/10.3390/rs11010065
Chicago/Turabian StyleEwertowski, Marek W., Aleksandra M. Tomczyk, David J. A. Evans, David H. Roberts, and Wojciech Ewertowski. 2019. "Operational Framework for Rapid, Very-high Resolution Mapping of Glacial Geomorphology Using Low-cost Unmanned Aerial Vehicles and Structure-from-Motion Approach" Remote Sensing 11, no. 1: 65. https://doi.org/10.3390/rs11010065
APA StyleEwertowski, M. W., Tomczyk, A. M., Evans, D. J. A., Roberts, D. H., & Ewertowski, W. (2019). Operational Framework for Rapid, Very-high Resolution Mapping of Glacial Geomorphology Using Low-cost Unmanned Aerial Vehicles and Structure-from-Motion Approach. Remote Sensing, 11(1), 65. https://doi.org/10.3390/rs11010065