A Pose Awareness Solution for Estimating Pedestrian Walking Speed

 , , , and
, , , and
Abstract
1. Introduction
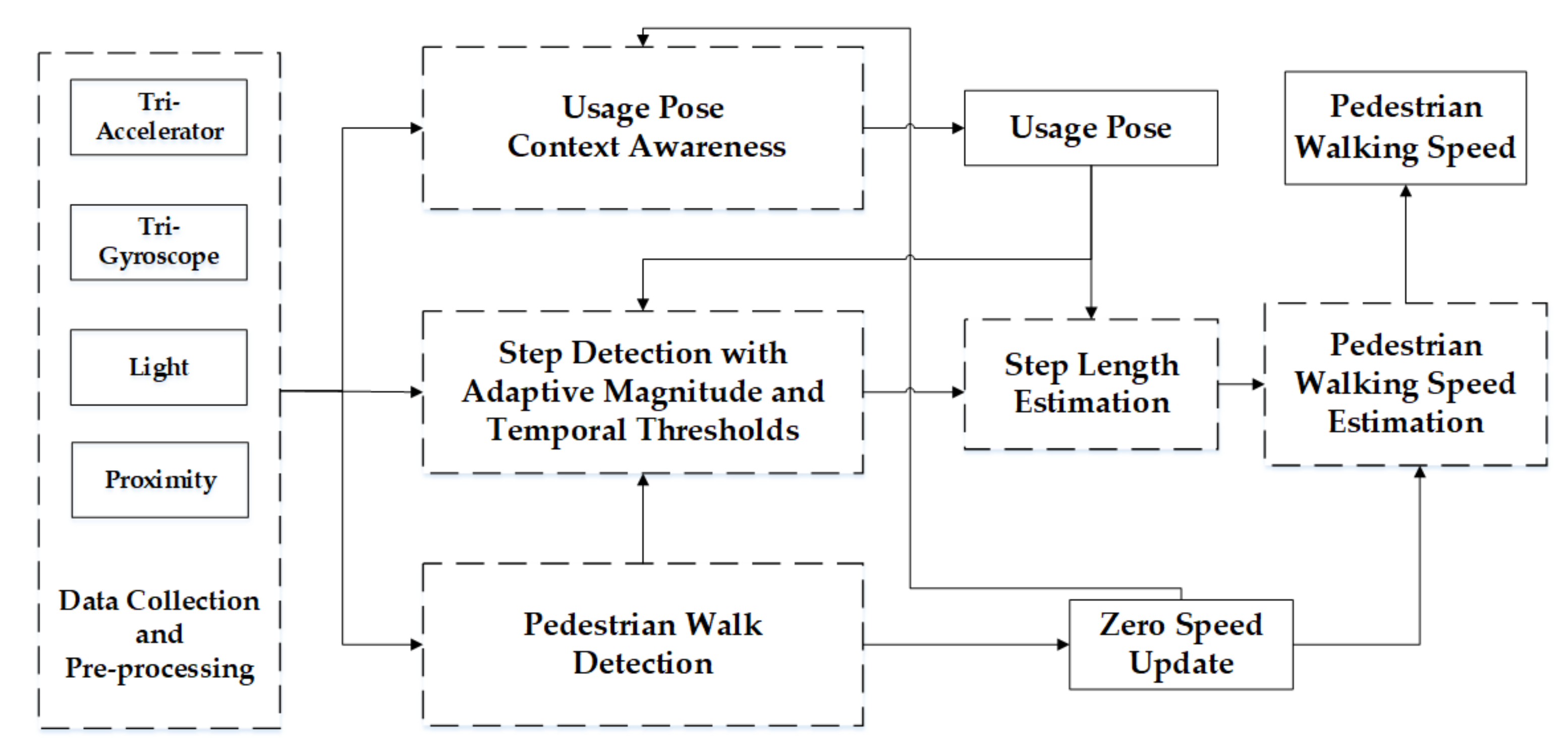
2. Materials and Methods
2.1. Usage Pose Context Awareness Based on Multi-Sensor Data
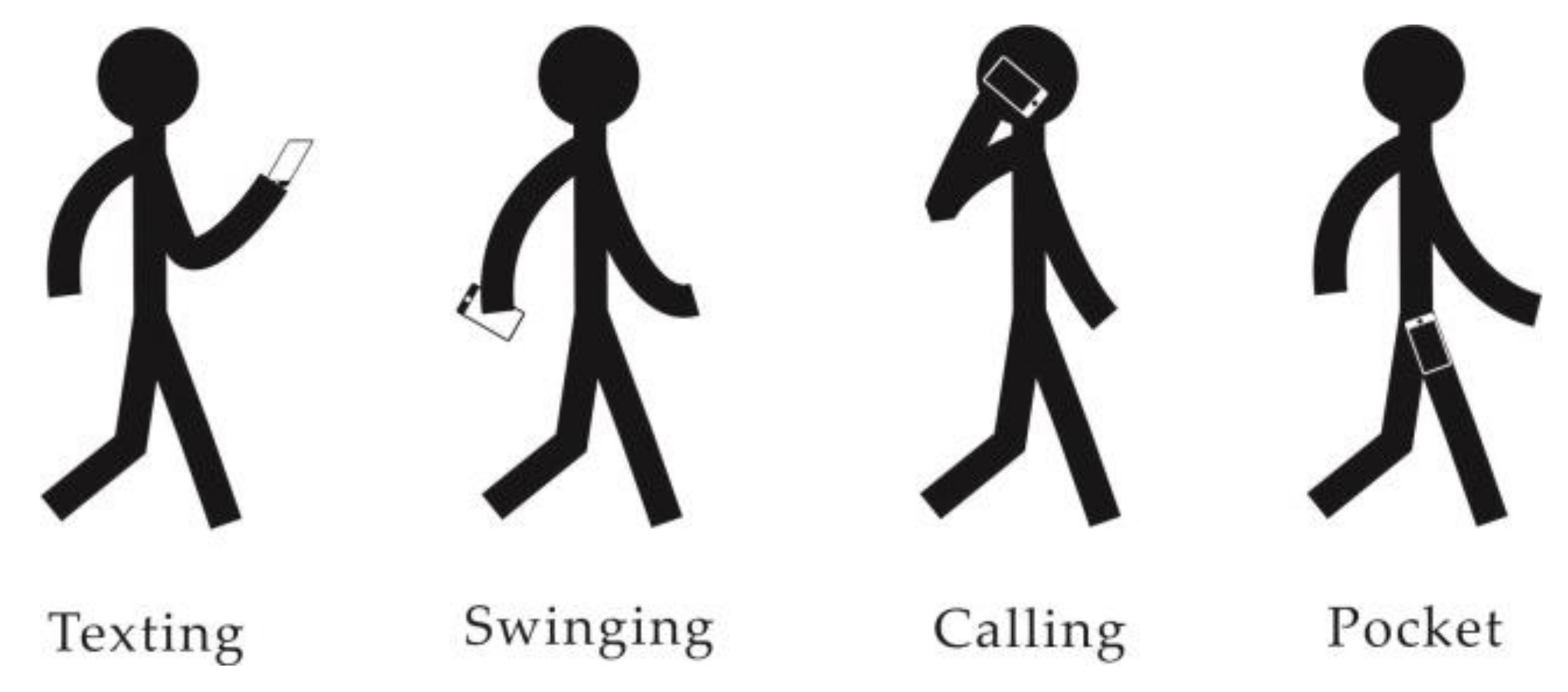
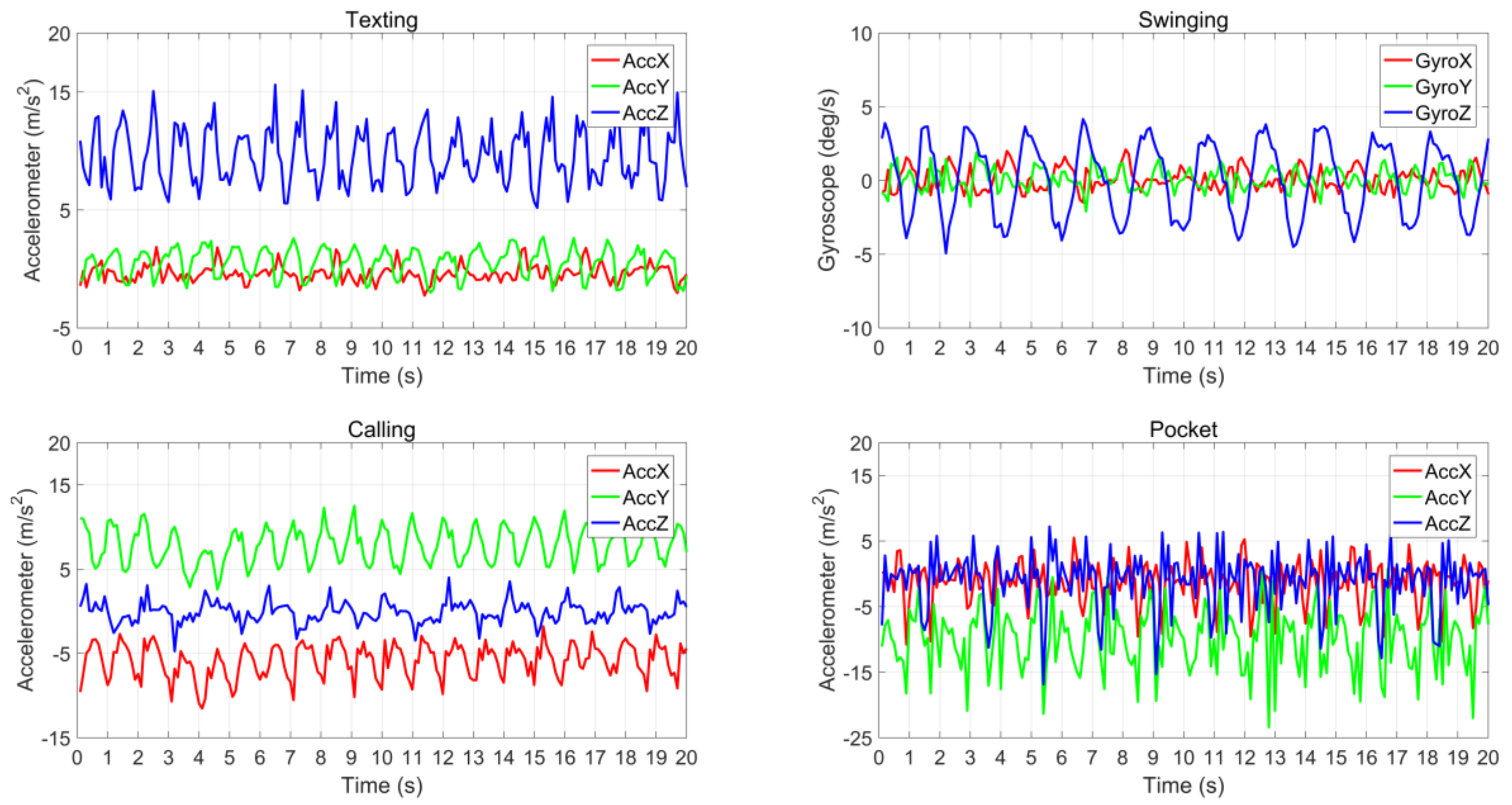
2.1.1. Usage Pose Context Definition
- Hand texting: This case is the smartphone use case. To perform operations such as text messaging or reading the news, the user’s eyes, hand, and screen should remain relatively stationary.
- Hand calling: In hand calling, the user makes a phone call while walking or remaining stationary. Intuitively, user’s ear, hand, and phone should remain relatively stationary.
- In pocket: The user carries the mobile device in a pocket.
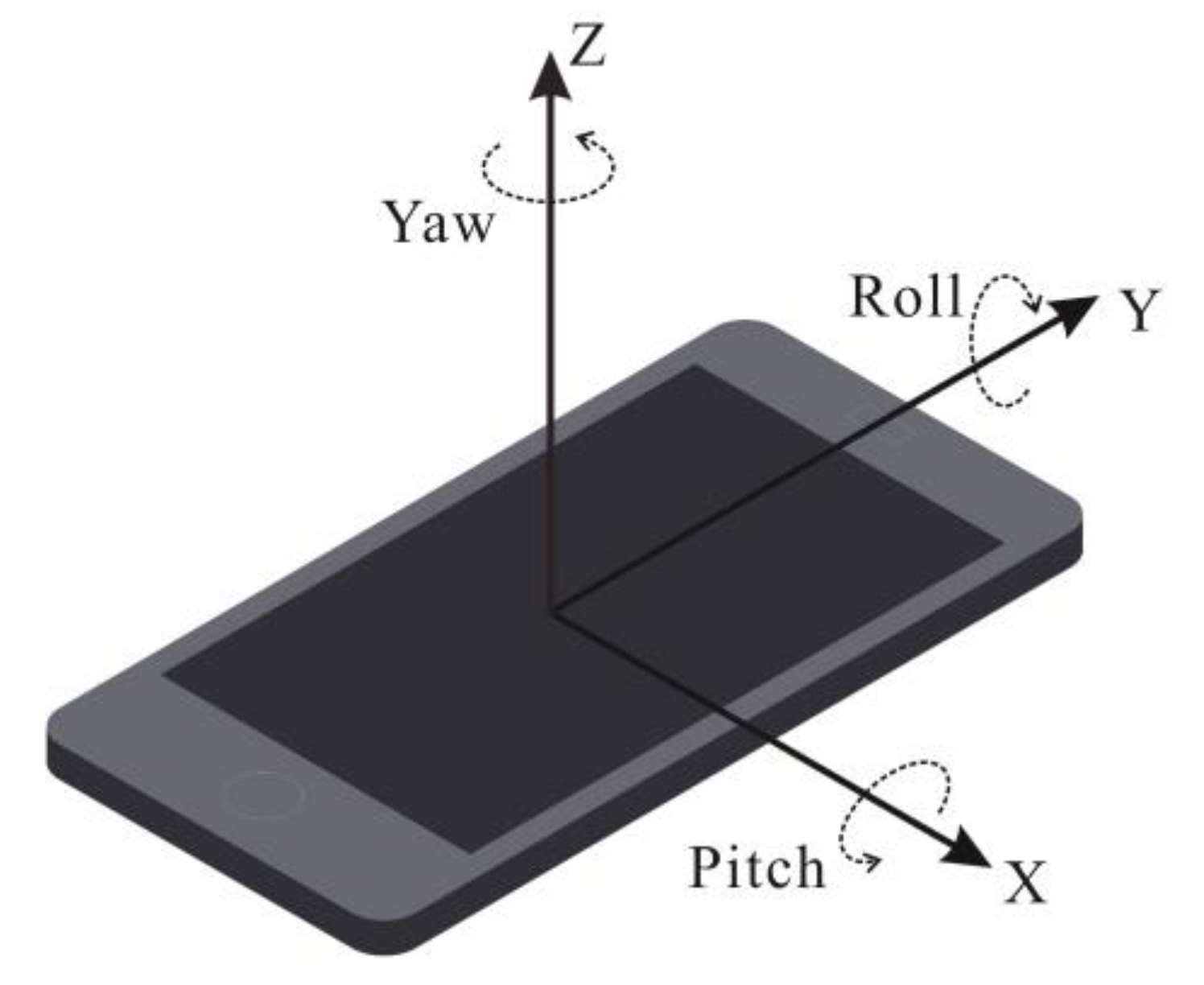
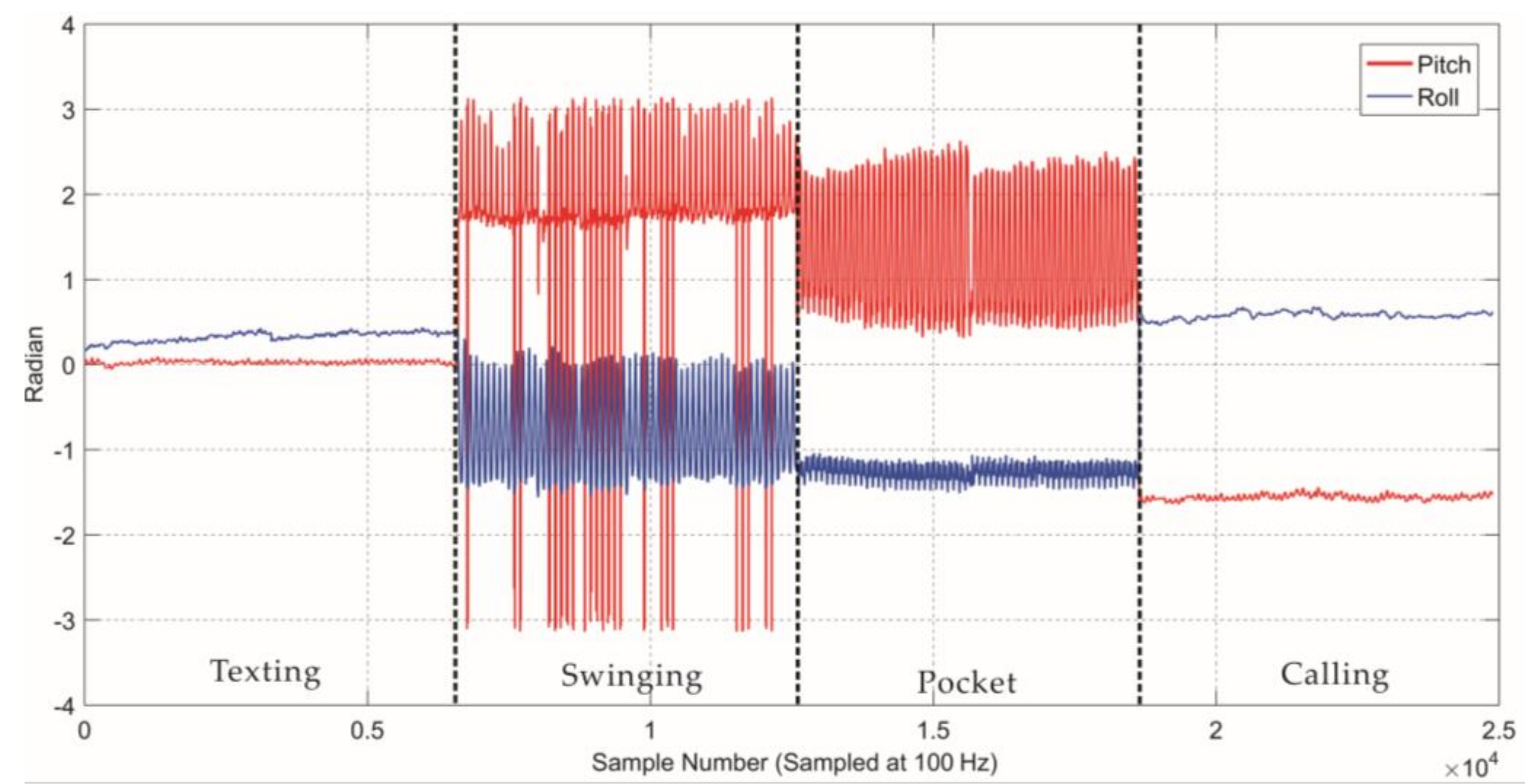
2.1.2. Feature Extraction
2.1.3. Classification
2.2. Pedestrian Walking Speed Estimation
2.2.1. Walk Detection
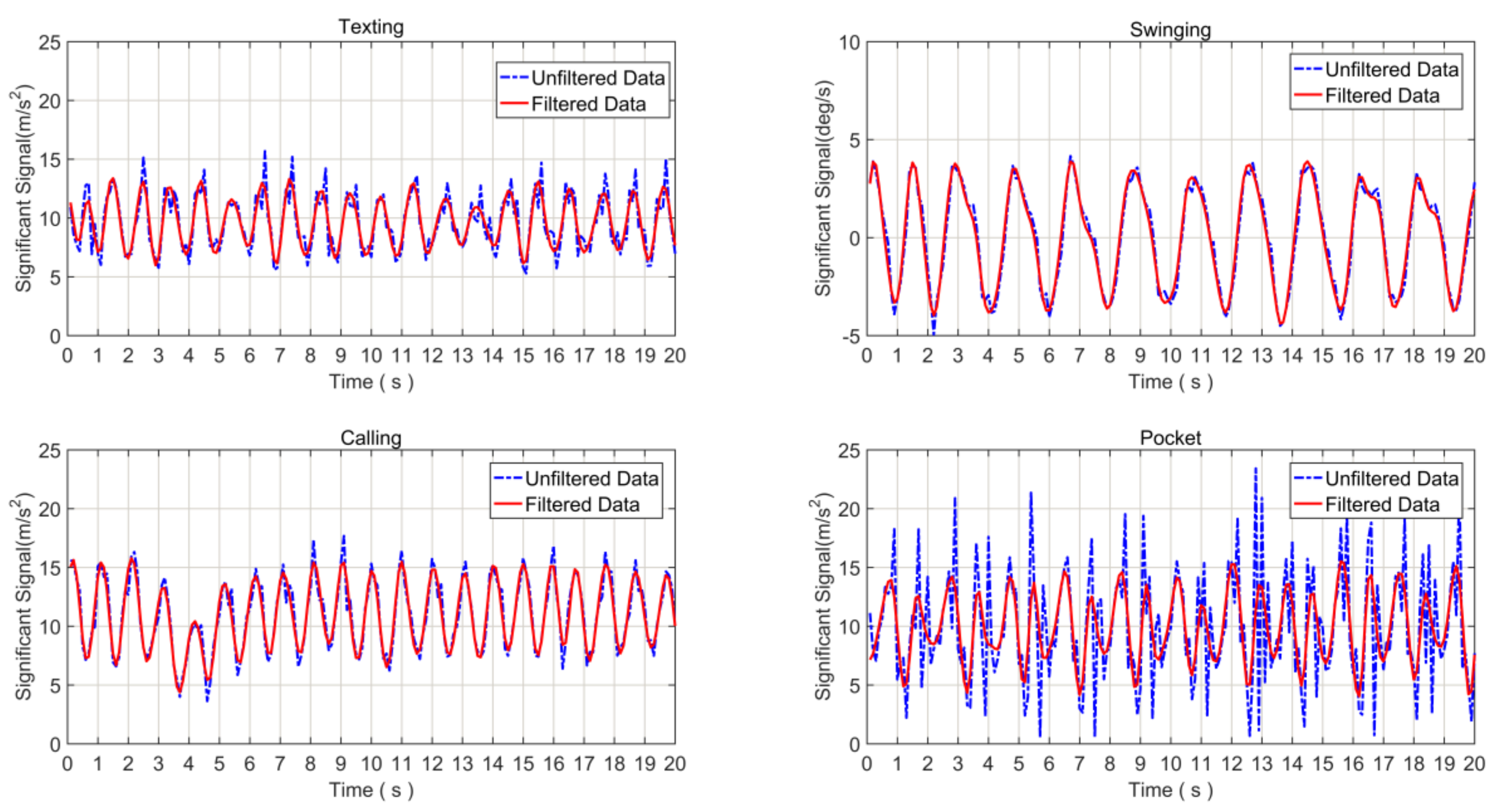
2.2.2. Preprocessing
2.2.3. Step Detection with Adaptive Magnitude and Temporal Thresholds
2.2.4. Step Length Estimation
3. Results
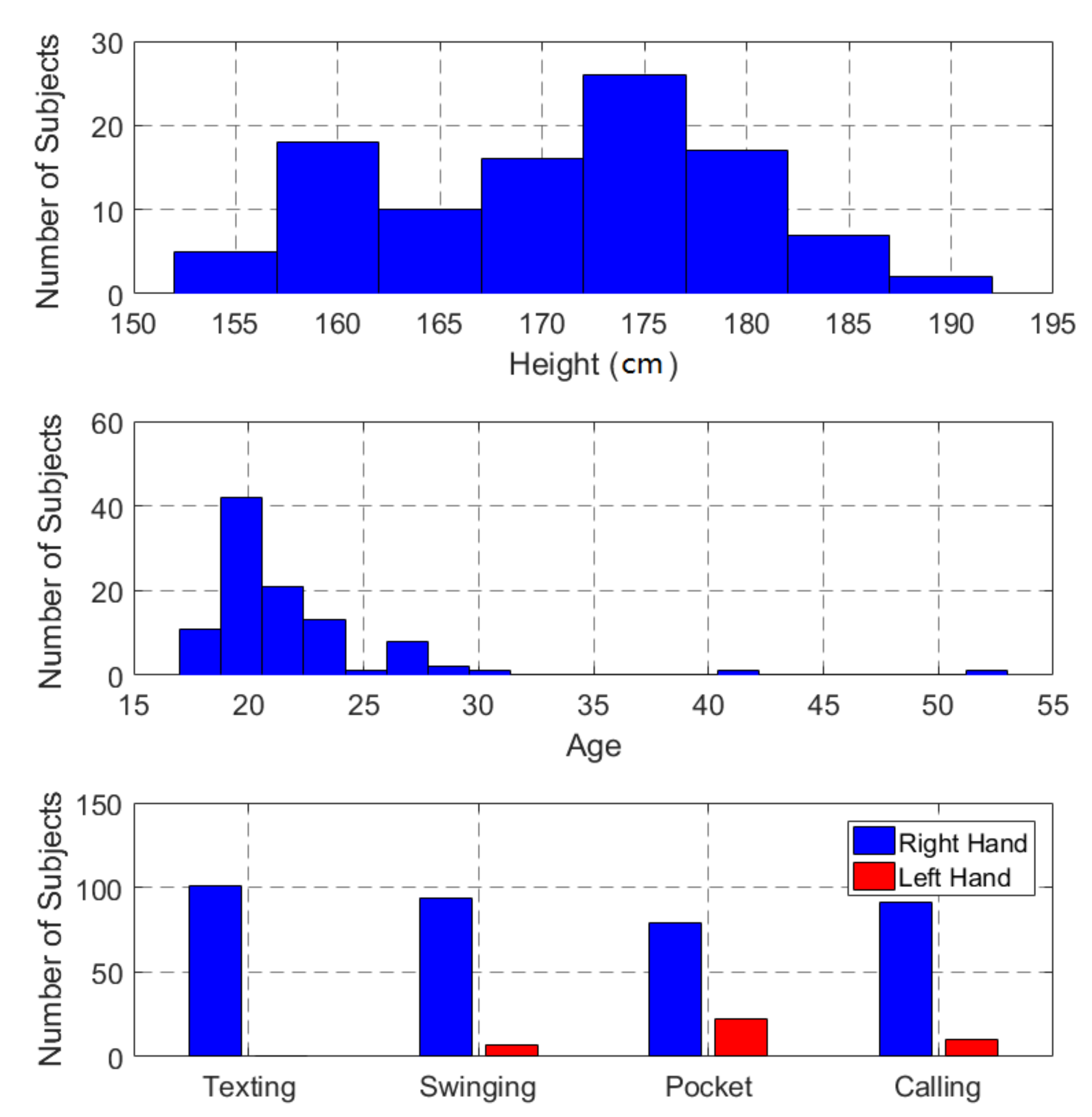
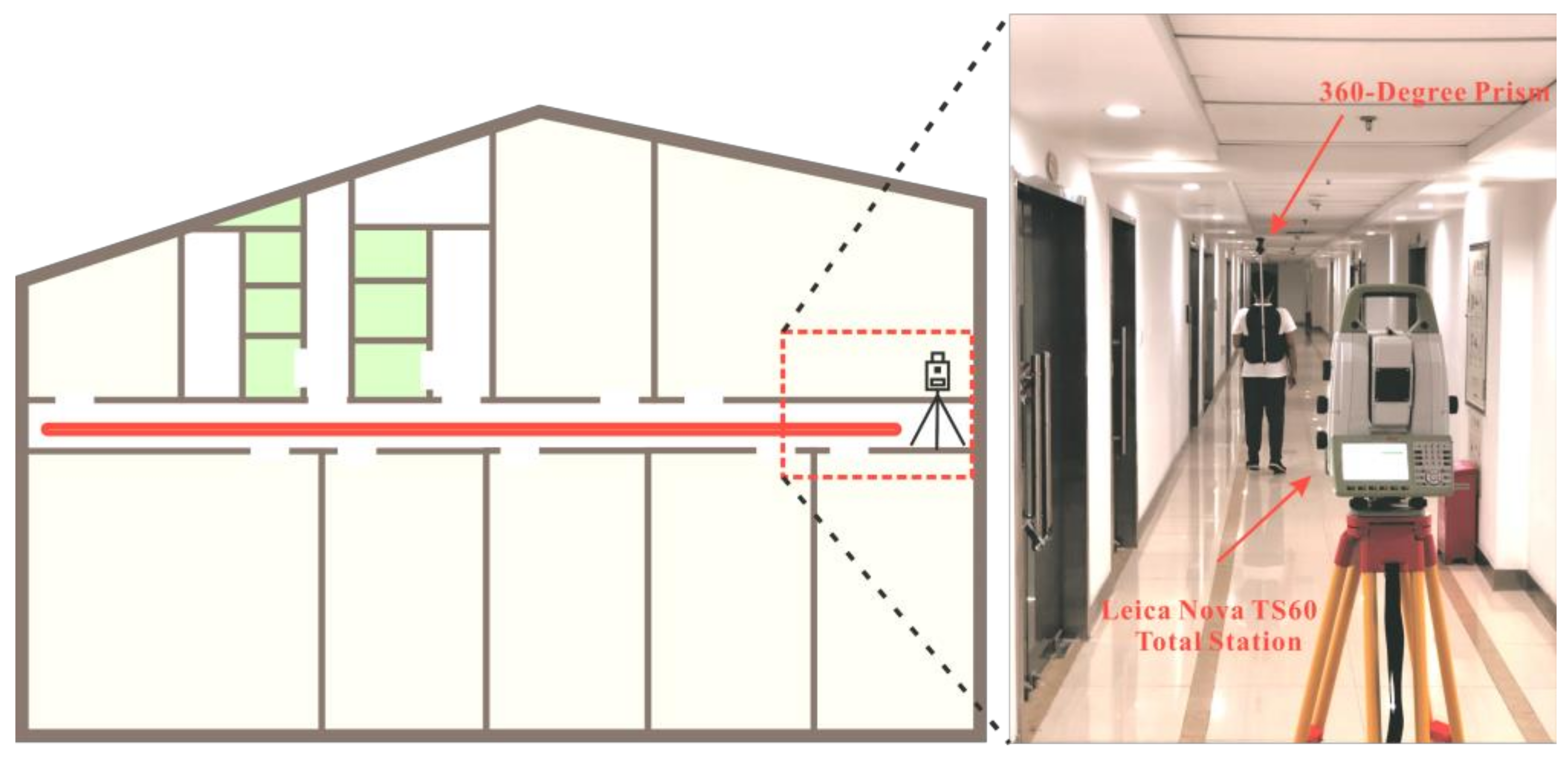
3.1. Experimental Setup
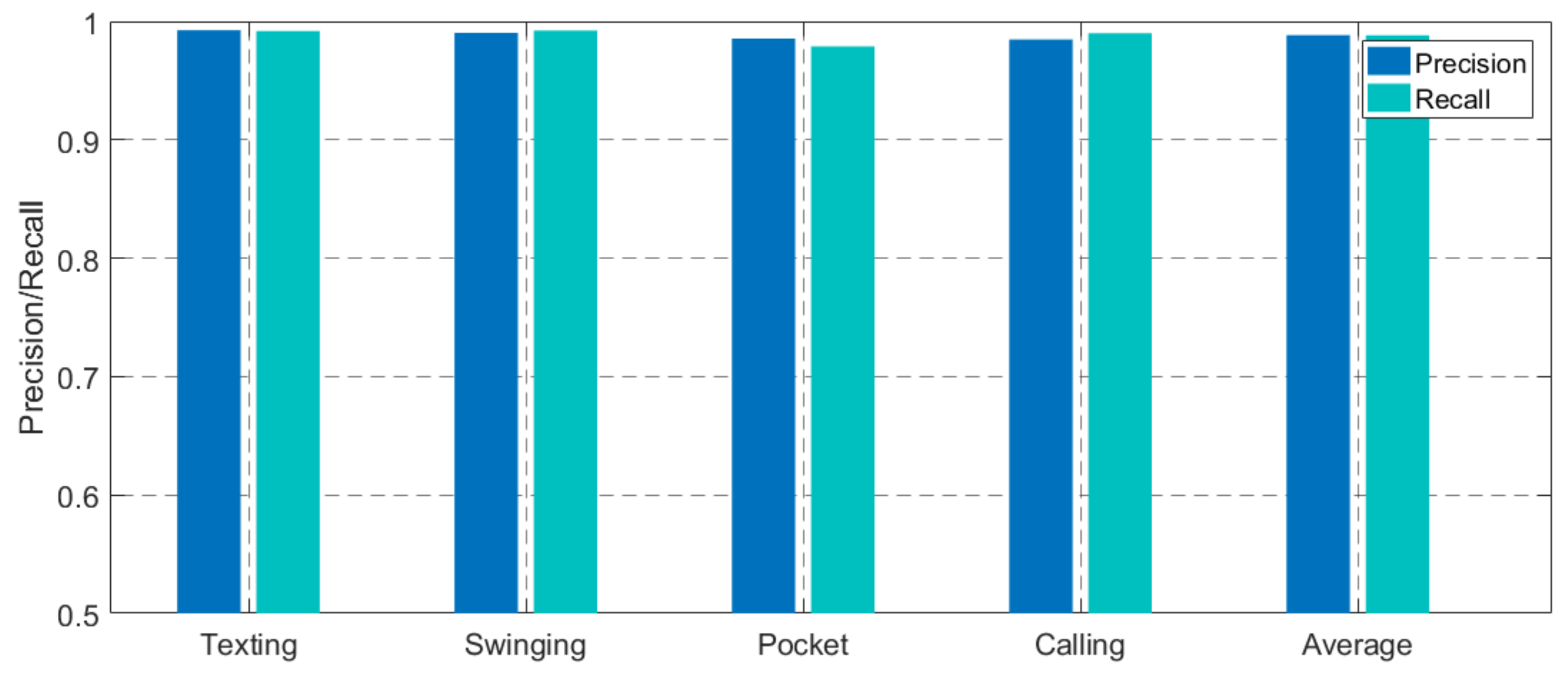
3.2. Perfomance Evaluation of Usage Pose Awareness
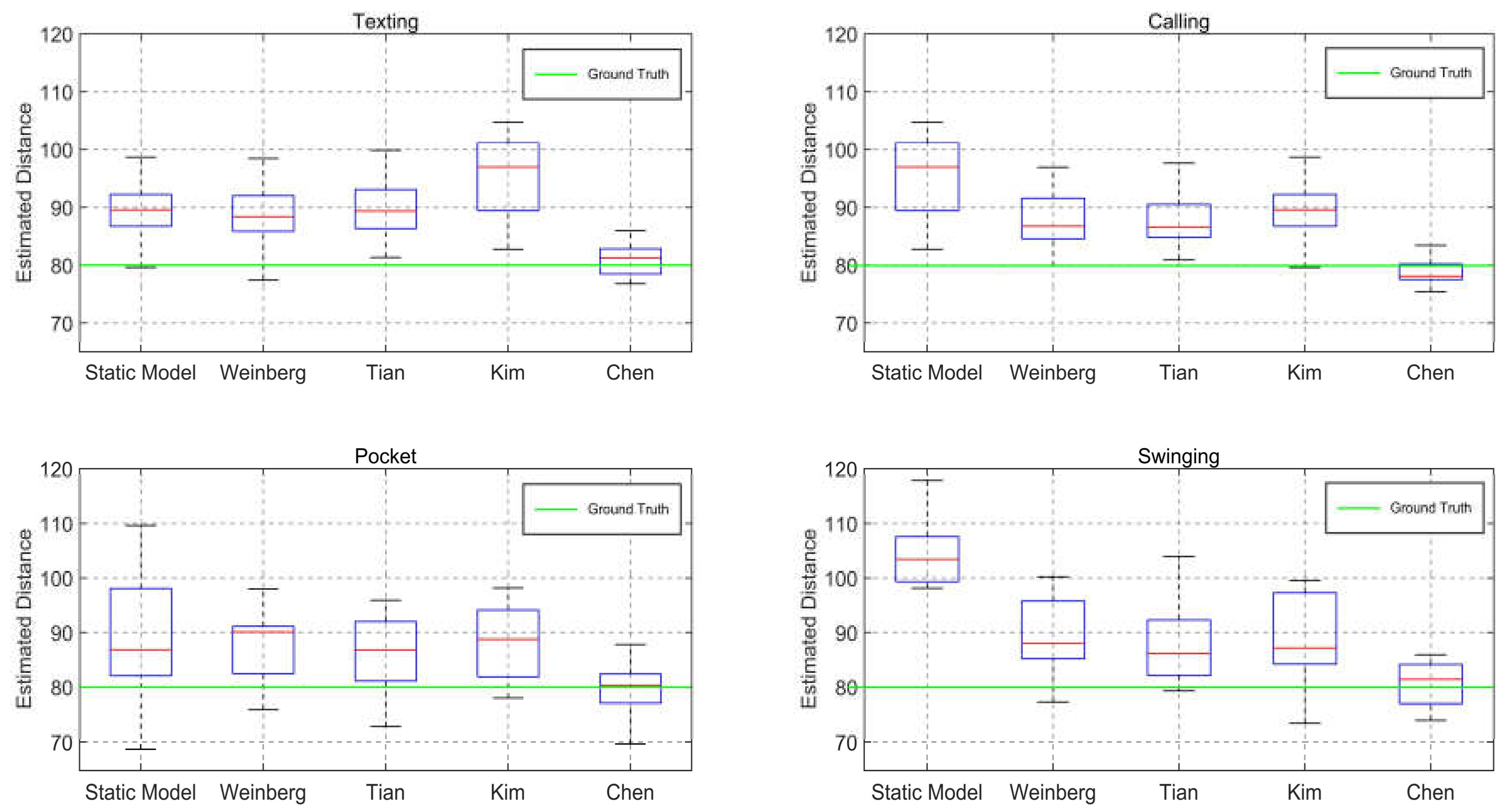
3.3. Pedestrian Walking Speed Estimation Results and Analysis
4.Discussion
5.Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hu, J.-S.; Sun, K.-C.; Cheng, C.-Y. A model-based human walking speed estimation using body acceleration data. In Proceedings of the 2012 IEEE International Conference onRobotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 1985–1990. [Google Scholar]
- Andriacchi, T.P.; Ogle, J.A.; Galante, J.O. Walking speed as a basis for normal and abnormal gait measurements. J. Biomech. 1977, 10, 261–268. [Google Scholar] [CrossRef]
- Fritz, S.; Lusardi, M. White paper: “Walking speed: The sixth vital sign”. J. Geriatr. Phys. Ther. 2009, 32, 46–49. [Google Scholar] [CrossRef] [PubMed]
- Adib, F.; Katabi, D. See through walls with WiFi! ACM Sigcomm Comput. Commun. Rev. 2013, 43, 75–86. [Google Scholar] [CrossRef]
- Pu, Q.; Sidhant, G.; Gollakota, S.; Patel, S. Whole-home gesture recognition using wireless signals. Comp. Commun. Rev. 2013, 43, 485–486. [Google Scholar] [CrossRef]
- Zhao, M.; Adib, F.; Katabi, D. Emotion recognition using wireless signals. In Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking, New York, NY, USA, 3–7 October 2016; pp. 95–108. [Google Scholar]
- Shi, S.; Sigg, S.; Zhao, W.; Ji, Y. Monitoring Attention Using Ambient FM Radio Signals. IEEE Pervasive Comput. 2014, 13, 30–36. [Google Scholar] [CrossRef]
- Sigg, S.; Scholz, M.; Shi, S.; Ji, Y.; Beigl, M. RF-Sensing of Activities from Non-Cooperative Subjects in Device-Free Recognition Systems Using Ambient and Local Signals. IEEE Trans. Mob. Comput. 2014, 13, 907–920. [Google Scholar] [CrossRef]
- Sigg, S.; Blanke, U.; Tröster, G. The telepathic phone: Frictionless activity recognition from WiFi-RSSI. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications, Budapest, Hungary, 24–28 March 2014; pp. 148–155. [Google Scholar]
- Park, J.-G.; Patel, A.; Curtis, D.; Teller, S.; Ledlie, J. Online pose classification and walking speed estimation using handheld devices. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 23–28 April 2017; pp. 113–122. [Google Scholar]
- Yang, S.; Li, Q. Inertial Sensor-Based Methods in Walking Speed Estimation: A Systematic Review. Sensors 2012, 12, 6102–6116. [Google Scholar] [CrossRef] [PubMed]
- Vathsangam, H.; Emken, A.; Spruijt-Metz, D.; Sukhatme, G.S. Toward free-living walking speed estimation using Gaussian process-based regression with on-body accelerometers and gyroscopes. In Proceedings of the 2010 4th International Conference on-NO PERMISSIONS Pervasive Computing Technologies for Healthcare (PervasiveHealth), Munich, Germany, 22–25 March 2010; pp. 1–8. [Google Scholar]
- Yeoh, W.S.; Pek, I.; Yong, Y.H.; Chen, X. Ambulatory monitoring of human posture and walking speed using wearable accelerometer sensors. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 5184–5187. [Google Scholar]
- Shrestha, A.; Won, M. DeepWalking: Enabling Smartphone-based Walking Speed Estimation Using Deep Learning. arXiv, 2018; arXiv:1805.03368. [Google Scholar]
- Cox, J.; Cao, Y.; Chen, G.; He, J.; Xiao, D. Smartphone-Based Walking Speed Estimation for Stroke Mitigation. In Proceedings of the IEEE International Symposium on Multimedia, Taichung, Taiwan, 10–12 December 2014; pp. 328–332. [Google Scholar]
- Cho, D.-K.; Mun, M.; Lee, U.; Kaiser, W.J.; Gerla, M. Autogait: A mobile platform that accurately estimates the distance walked. In Proceedings of the 2010 IEEE international conference on Pervasive computing and communications (PerCom), Mannheim, Germany , 29 March–2 April 2010; pp. 116–124. [Google Scholar]
- Randell, C.; Djiallis, C.; Muller, H. Personal Position Measurement Using Dead Reckoning. In Proceedings of the 7th IEEE International Symposium on Wearable Computers, White Plains, NY, USA, 21–23 October 2003; pp. 166–173. [Google Scholar]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar]
- Matsubayashi, M.; Shiraishi, Y. A Method for Estimating Walking Speed by Using Magnetic Signature to Grasp People Flow in Indoor Passages. In Proceedings of the 13th International Conference on Mobile and Ubiquitous Systems: Computing NETWORKING and Services, Hiroshima, Japan, 28 November–1 December 2016; pp. 94–99. [Google Scholar]
- Tien, I.; Glaser, S.D.; Bajcsy, R.; Goodin, D.S.; Aminoff, M.J. Results of using a wireless inertial measuring system to quantify gait motions in control subjects. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 904–915. [Google Scholar] [CrossRef] [PubMed]
- Jahn, J.; Batzer, U.; Seitz, J.; Patino-Studencka, L.; Boronat, J.G. Comparison and evaluation of acceleration based step length estimators for handheld devices. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Vienna, Austria, 15–17 December 2010; pp. 1–6. [Google Scholar]
- Chen, R.; Pei, L.; Chen, Y. A smart phone based PDR solution for indoor navigation. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 20–23 September 2011; pp. 1404–1408. [Google Scholar]
- Renaudin, V.; Susi, M.; Lachapelle, G. Step length estimation using handheld inertial sensors. Sensors 2012, 12, 8507–8525. [Google Scholar] [CrossRef]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive:unsupervised indoor localization. In Proceedings of the International Conference on Mobile Systems, Applications, and Services, Lake District, UK, 25–29 June 2012; pp. 197–210. [Google Scholar]
- Jianga, S.; Fuqiang, G.; Xuke, H.; Allison, K. APFiLoc: An Infrastructure-Free Indoor Localization Method Fusing Smartphone Inertial Sensors, Landmarks and Map Information. Sensors 2015, 15, 27251–27272. [Google Scholar]
- Tian, Q.; Salcic, Z.; Kevin, I.; Wang, K.; Pan, Y. A multi-mode dead reckoning system for pedestrian tracking using smartphones. IEEE Sens. J. 2016, 16, 2079–2093. [Google Scholar] [CrossRef]
- Cho, S.Y.; Chan, G.P. MEMS Based Pedestrian Navigation System. J. Navig. 2005, 59, 135–153. [Google Scholar] [CrossRef]
- Weinberg, H. Using the ADXL202 in pedometer and personal navigation applications. In Analog Devices AN-602 Application Note 2.2; Analog Devices, Inc.: Norwood, MA, USA, 2002; Volume 2, pp. 1–6. [Google Scholar]
- Kim, J.W.; Jang, H.J.; Hwang, D.-H.; Park, C. A step, stride and heading determination for the pedestrian navigation system. Positioning 2004, 1. [Google Scholar] [CrossRef]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor localization method using phone inertial sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 421–430. [Google Scholar]
- Chen, R.; Chu, T.; Liu, K.; Liu, J.; Chen, Y. Inferring Human Activity in Mobile Devices by Computing Multiple Contexts. Sensors 2015, 15, 21219–21238. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, X.; Chen, X. Robust Pedestrian Dead Reckoning Based on MEMS-IMU for Smartphones. Sensors 2018, 18. [Google Scholar] [CrossRef]
- Qian, J.; Pei, L.; Ma, J.; Ying, R.; Liu, P. Vector graph assisted pedestrian dead reckoning using an unconstrained smartphone. Sensors 2015, 15, 5032–5057. [Google Scholar] [CrossRef]
- Hand, D.J.; Yu, K. Idiot’s Bayes—Not So Stupid After All? Int. Stat. Rev. 2010, 69, 385–398. [Google Scholar]
- Witten, I.H.; Frank, E. Data Mining: Practical Machine Learning Tools and Techniques with Java Implementations; Morgan Kaufmann Publishers: Burlington, MA, USA, 2000. [Google Scholar]
- Borio, D. Accelerometer signal features and classification algorithms for positioning applications. In Proceedings of the 2011 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 24–26 January 2011. [Google Scholar]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H.; De Jesús, O. Neural Network Design; PWS Publishing Company: Boston, MA, USA, 1996; Volume 20. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Yin, J.; Yang, Q.; Pan, J.J. Sensor-Based Abnormal Human-Activity Detection. IEEE Trans. Knowl. Data Eng. 2008, 20, 1082–1090. [Google Scholar]
- Liaw, A.; Wiener, M. Classification and regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Abdulazim, T.; Abdelgawad, H.; Habib, K.; Abdulhai, B. Using smartphones and sensor technologies to automate collection of travel data. Transp. Res. Rec. J. Transp. Res. Board 2013, 44–52. [Google Scholar] [CrossRef]
- Shafique, M.A.; Hato, E. Use of acceleration data for transportation mode prediction. Transportation 2015, 42, 163–188. [Google Scholar] [CrossRef]
- Kuo, A.D. A simple model of bipedal walking predicts the preferred speed–step length relationship. J. Biomech. Eng. 2001, 123, 264–269. [Google Scholar] [CrossRef] [PubMed]
- Butterworth, S. On the theory of filter amplifiers. Wirel. Eng. 1930, 7, 536–541. [Google Scholar]
- Susi, M.; Renaudin, V.; Lachapelle, G. Motion mode recognition and step detection algorithms for mobile phone users. Sensors 2013, 13, 1539–1562. [Google Scholar] [CrossRef] [PubMed]
- Pratama, A.R.; Widyawan; Hidayat, R. Smartphone-based Pedestrian Dead Reckoning as an indoor positioning system. In Proceedings of the International Conference on System Engineering and Technology, Bandung, Indonesia, 11–12 September 2012; pp. 1–6. [Google Scholar]
- Tian, Q.; Salcic, Z.; Kevin, I.; Wang, K.; Pan, Y. An enhanced pedestrian dead reckoning approach for pedestrian tracking using smartphones. In Proceedings of the 2015 IEEE Tenth International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Singapore, 7–9 April 2015; pp. 1–6. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Sensor | Description |
|---|---|---|
| Accelerometer/Gyroscope | Mean of the pitch angle over the moving window | |
| Accelerometer/Gyroscope | Median of the pitch angle over the moving window | |
| Accelerometer/Gyroscope | Maximum value of the pitch angle over the moving window | |
| Accelerometer/Gyroscope | Minimum value of the pitch angle over the moving window | |
| Accelerometer/Gyroscope | Root mean square of the pitch angle over the moving window | |
| Accelerometer/Gyroscope | Range of the pitch angle over the moving window | |
| Accelerometer/Gyroscope | Mean of the roll angle over the moving window | |
| Accelerometer/Gyroscope | Median of the roll angle over the moving window | |
| Accelerometer/Gyroscope | Maximum value of the roll angle over the moving window | |
| Accelerometer/Gyroscope | Minimum value of the roll angle over the moving window | |
| Accelerometer/Gyroscope | Root mean square of the roll angle over the moving window | |
| Accelerometer/Gyroscope | Range of the roll angle over the moving window | |
| Light | Mean of the light value over the moving window | |
| Light | Median of the light value over the moving window | |
| Light | Root mean square of the light value over the moving window | |
| Proximity | Mean of the proximity value over the moving window | |
| Proximity | Median of the proximity value over the moving window | |
| Proximity | Root mean square of the proximity value over the moving window |
| Input:, , , , ,, Output: Step point Begin: calculate according to Equation (1). if or return false else calculate according to and Equations (3)–(6). if if update , return end if end if end if |
| Predicted Class | ||||||||
|---|---|---|---|---|---|---|---|---|
| Actual class | Class | Texting | Swinging | Calling | Total | PA | OE | |
| Texting | 1219 | 2 | 8 | 0 | 1229 | 99.19% | 0.81% | |
| Swinging | 2 | 1031 | 5 | 1 | 1039 | 99.23% | 0.77% | |
| 3 | 3 | 1018 | 16 | 1040 | 97.88% | 2.12% | ||
| Calling | 4 | 5 | 2 | 1101 | 1112 | 99.01% | 0.99% | |
| Total | 1228 | 1041 | 1033 | 1118 | 4420 | |||
| UA | 99.27% | 99.04% | 98.55% | 98.48% | OA | 98.85% | ||
| CE | 0.73% | 0.96% | 1.45% | 1.52% | KS | 98.46% | ||
| Predicted Class | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Actualm class | Class | T | S(L1) | S(R2) | P(L) | P(R) | C(L) | C(R) | Total | PA | OE |
| T | 1219 | 0 | 2 | 0 | 8 | 0 | 0 | 1229 | 99.19% | 0.81% | |
| S (L) | 0 | 58 | 0 | 0 | 0 | 0 | 0 | 58 | 100% | 0% | |
| S (R) | 2 | 0 | 973 | 2 | 3 | 1 | 0 | 981 | 99.18% | 0.82% | |
| P (L) | 0 | 0 | 0 | 208 | 16 | 2 | 4 | 230 | 90.43% | 9.57% | |
| P (R) | 3 | 0 | 3 | 10 | 784 | 2 | 8 | 810 | 96.79% | 3.21% | |
| C (L) | 2 | 0 | 1 | 0 | 1 | 119 | 3 | 126 | 94.44% | 5.56% | |
| C (R) | 2 | 2 | 2 | 0 | 1 | 0 | 979 | 986 | 99.29% | 0.71% | |
| Total | 1228 | 60 | 981 | 220 | 813 | 124 | 994 | 4420 | |||
| UA | 99.27% | 96.67% | 99.18% | 94.55% | 96.43% | 95.98% | 98.49% | OA | 98.19% | ||
| CE | 0.73% | 3.33% | 0.82% | 5.45% | 3.57% | 4.02% | 1.51% | KS | 97.70% | ||
| Subject | Truth Steps (T) | Estimated Steps (T) | Truth Steps (S) | Estimated Steps (S) | Truth Steps (P) | Estimated Steps (P) | Truth Steps (C) | Estimated Steps (C) |
|---|---|---|---|---|---|---|---|---|
| S1 | 128 | 128 | 124 | 123 | 121 | 124 | 125 | 126 |
| S2 | 113 | 115 | 112 | 112 | 112 | 112 | 114 | 115 |
| S3 | 118 | 119 | 116 | 115 | 117 | 115 | 115 | 115 |
| S4 | 103 | 103 | 102 | 101 | 100 | 102 | 102 | 103 |
| S5 | 119 | 118 | 111 | 112 | 109 | 103 | 121 | 117 |
| S6 | 126 | 126 | 121 | 117 | 123 | 117 | 122 | 123 |
| S7 | 126 | 125 | 117 | 116 | 126 | 127 | 122 | 119 |
| S8 | 106 | 108 | 101 | 115 | 106 | 106 | 104 | 105 |
| S9 | 116 | 116 | 108 | 109 | 107 | 109 | 111 | 112 |
| S10 | 102 | 103 | 103 | 107 | 102 | 104 | 103 | 104 |
| S11 | 110 | 110 | 103 | 106 | 106 | 108 | 108 | 108 |
| S12 | 121 | 120 | 114 | 108 | 109 | 113 | 116 | 113 |
| Average | 115.67 | 115.92 | 111 | 111.75 | 111.5 | 111.67 | 113.58 | 113.33 |
| Evaluation Parameters | Definition |
|---|---|
| Estimated speed | |
| Ground truth speed | |
| Absolute error rate | |
| Mean absolute percentage error | |
| Estimated speed std |
| Method | Texting | Calling | Swinging | Average Error (%) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Error (%) | Std (m) | Error (%) | Std (m) | Error (%) | Std (m) | Error (%) | Std (m) | ||
| Static Model | 11.42 | 5.11 | 19.26 | 7.12 | 14.54 | 11.72 | 30.82 | 16.09 | 19.01 |
| Weinberg | 11.49 | 5.62 | 9.36 | 5.34 | 11.15 | 6.74 | 14.68 | 11.87 | 11.67 |
| Tian | 12.60 | 5.57 | 9.89 | 5.35 | 9.89 | 7.50 | 10.24 | 8.07 | 10.66 |
| Kim | 19.26 | 7.12 | 11.42 | 5.11 | 10.69 | 6.59 | 17.05 | 17.52 | 14.61 |
| Chen | 3.14 | 2.91 | 3.66 | 3.40 | 4.81 | 5.07 | 6.99 | 9.18 | 4.65 |
| Subject | Truth Speed (T) (m/s) | Estimated Speed (T) (m/s) | Truth Speed (S) (m/s) | Estimated Speed (S) (m/s) | Truth Speed (P) (m/s) | Estimated Speed (P) (m/s) | Truth Speed (C) (m/s) | Estimated Speed (C) (m/s) |
|---|---|---|---|---|---|---|---|---|
| S1 | 1.12 | 1.14 | 1.12 | 1.15 | 1.12 | 1.16 | 1.12 | 1.18 |
| S2 | 1.34 | 1.38 | 1.34 | 1.32 | 1.34 | 1.36 | 1.34 | 1.24 |
| S3 | 1.24 | 1.21 | 1.24 | 1.18 | 1.24 | 1.23 | 1.24 | 1.26 |
| S4 | 1.43 | 1.40 | 1.43 | 1.40 | 1.43 | 1.38 | 1.43 | 1.38 |
| S5 | 1.32 | 1.41 | 1.32 | 1.44 | 1.32 | 1.27 | 1.32 | 1.38 |
| S6 | 1.21 | 1.30 | 1.21 | 1.18 | 1.21 | 1.29 | 1.21 | 1.27 |
| S7 | 1.16 | 1.17 | 1.17 | 1.10 | 1.17 | 1.28 | 1.17 | 1.11 |
| S8 | 1.48 | 1.42 | 1.48 | 1.44 | 1.48 | 1.52 | 1.48 | 1.59 |
| S9 | 1.36 | 1.38 | 1.36 | 1.32 | 1.36 | 1.18 | 1.36 | 1.38 |
| S10 | 1.37 | 1.35 | 1.37 | 1.33 | 1.37 | 1.25 | 1.37 | 1.88 |
| S11 | 1.49 | 1.55 | 1.49 | 1.55 | 1.49 | 1.53 | 1.49 | 1.52 |
| S12 | 1.31 | 1.33 | 1.31 | 1.27 | 1.31 | 1.29 | 1.31 | 1.26 |
| Stat. | Texting | Calling | Swing | Average | |
|---|---|---|---|---|---|
| Mean (m/s) | 0.042 | 0.048 | 0.063 | 0.094 | 0.061 |
| Std (m/s) | 0.028 | 0.028 | 0.051 | 0.133 | 0.074 |
| Var (m/s)2 | 0.001 | 0.001 | 0.003 | 0.018 | 0.005 |
| Max (m/s) | 0.090 | 0.122 | 0.176 | 0.507 | 0.507 |
| 95th (m/s) | 0.089 | 0.068 | 0.126 | 0.110 | 0.121 |
| Median (m/s) | 0.031 | 0.039 | 0.046 | 0.058 | 0.043 |
| Min (m/s) | 0.006 | 0.022 | 0.013 | 0.015 | 0.006 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, G.; Chen, R.; Ye, F.; Chen, L.; Pan, Y.; Liu, M.; Cao, Z. A Pose Awareness Solution for Estimating Pedestrian Walking Speed. Remote Sens. 2019, 11, 55. https://doi.org/10.3390/rs11010055
Guo G, Chen R, Ye F, Chen L, Pan Y, Liu M, Cao Z. A Pose Awareness Solution for Estimating Pedestrian Walking Speed. Remote Sensing. 2019; 11(1):55. https://doi.org/10.3390/rs11010055
Chicago/Turabian StyleGuo, Guangyi, Ruizhi Chen, Feng Ye, Liang Chen, Yuanjin Pan, Mengyun Liu, and Zhipeng Cao. 2019. "A Pose Awareness Solution for Estimating Pedestrian Walking Speed" Remote Sensing 11, no. 1: 55. https://doi.org/10.3390/rs11010055
APA StyleGuo, G., Chen, R., Ye, F., Chen, L., Pan, Y., Liu, M., & Cao, Z. (2019). A Pose Awareness Solution for Estimating Pedestrian Walking Speed. Remote Sensing, 11(1), 55. https://doi.org/10.3390/rs11010055