Targeted Grassland Monitoring at Parcel Level Using Sentinels, Street-Level Images and Field Observations


Abstract

1. Introduction
1.1. The Importance of Grasslands
1.2. High-Resolution Remote Sensing Grasslands Monitoring
1.3. CAP Policy Context
1.4. Open Access Parcel-Level Crop Type Declarations
1.5. In Situ Data Needs
1.6. Street-Level Imagery
1.7. Objectives
2. Materials and Methods
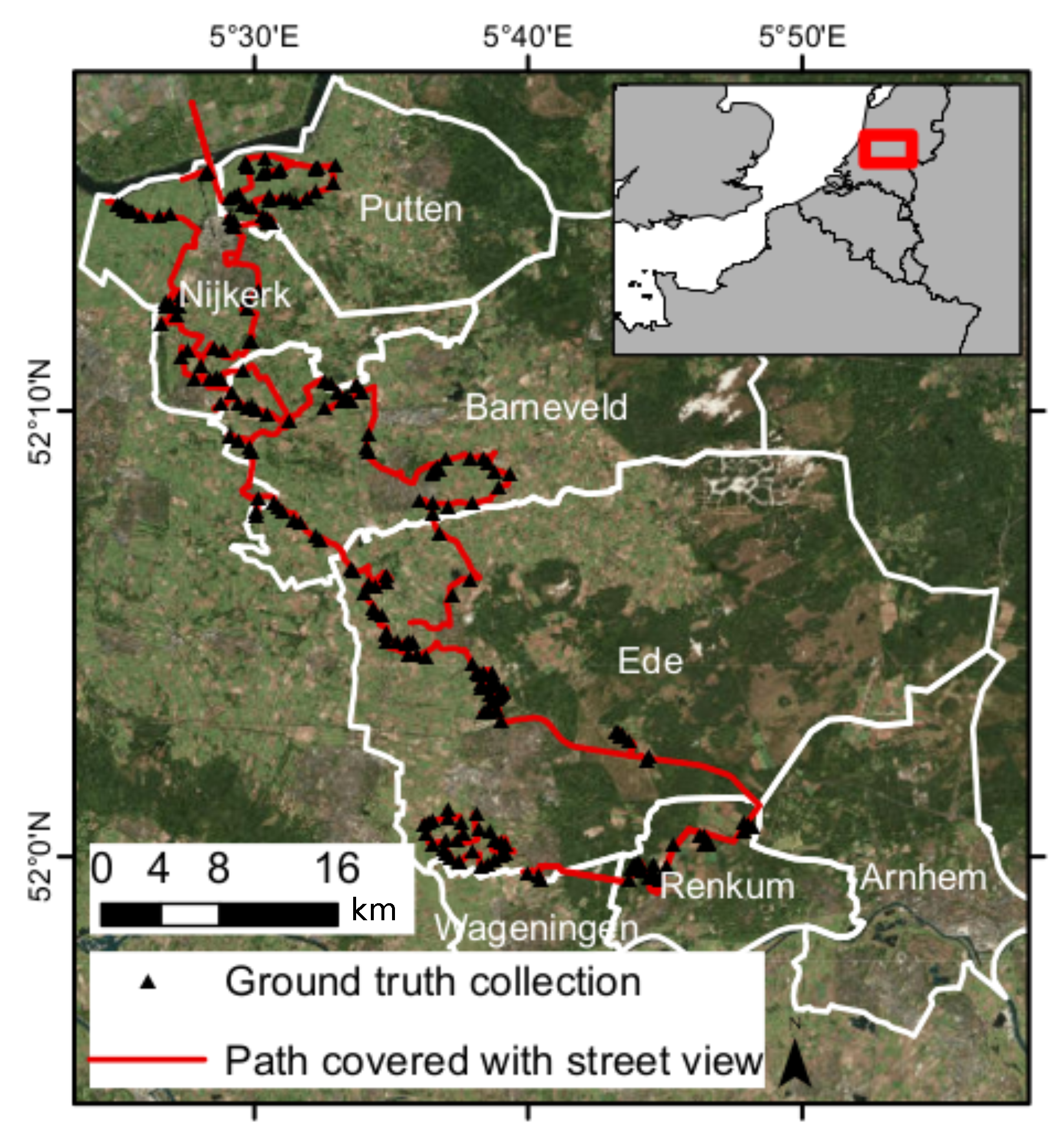
2.1. Study Area
2.2. Data
2.2.1. Agricultural Parcel Database
2.2.2. Sentinel-1
2.2.3. Sentinel-2
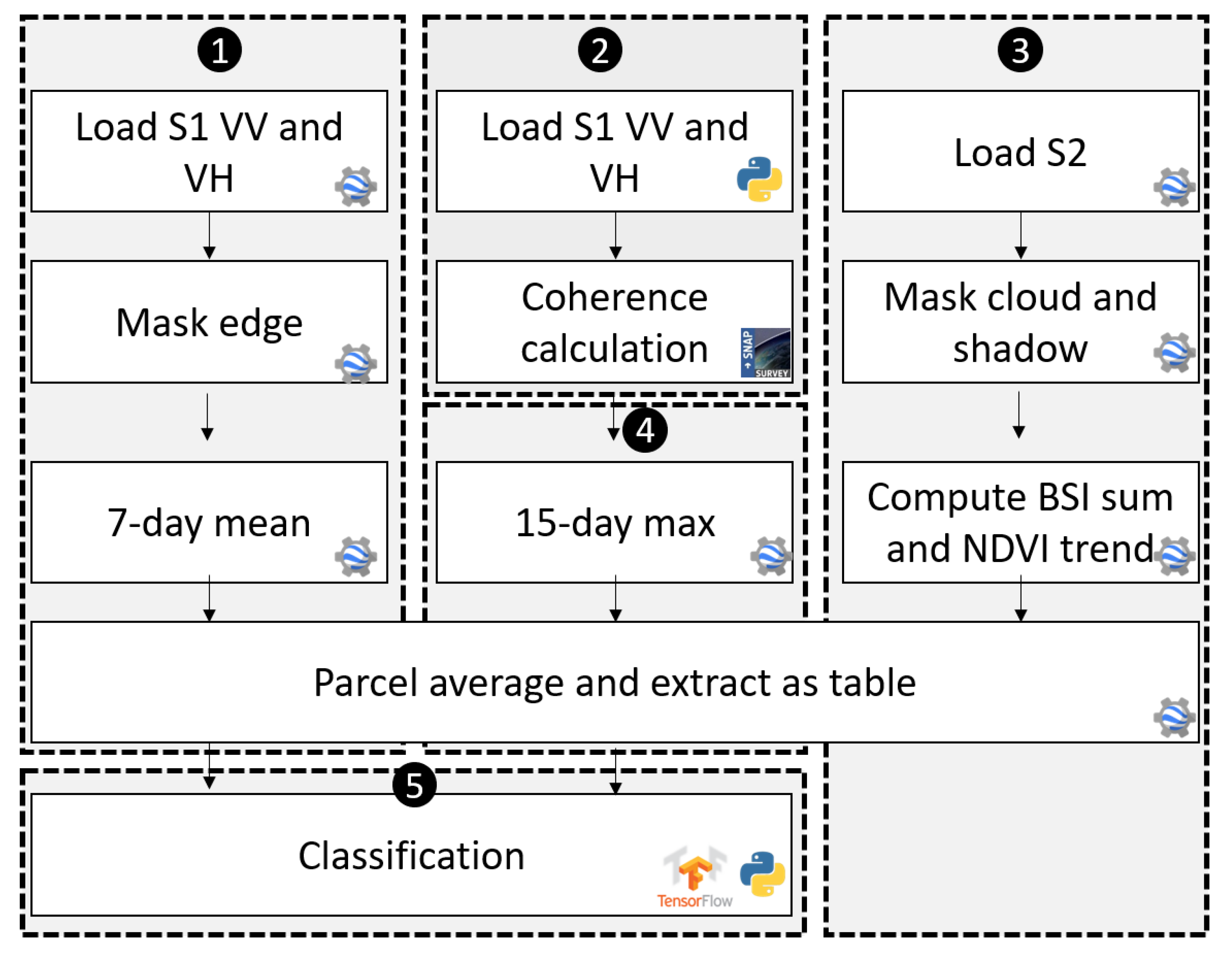
2.3. Methods
2.3.1. S1 Backscattering
2.3.2. S1 Coherence
2.3.3. Deep Learning S1 Backscatter and Coherence Classification
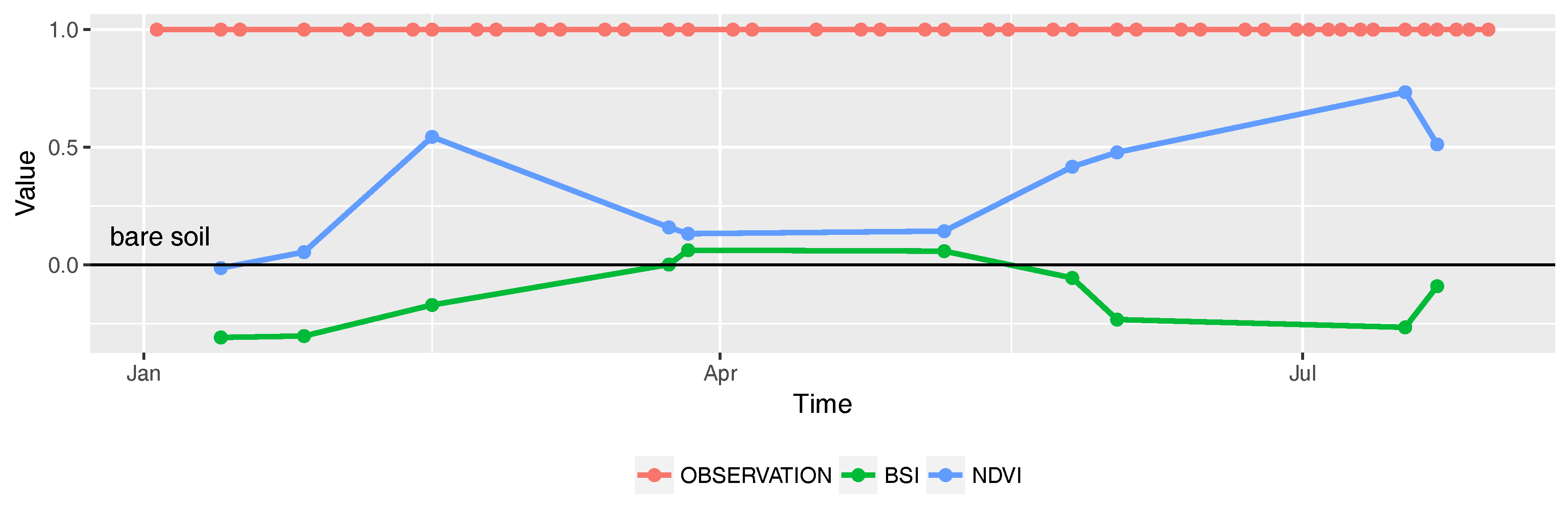
2.3.4. S2 Bare Soil Index
2.3.5. Combining Satellite Markers
2.4. Ground-Truth Collection and Accuracy Assessments
2.4.1. Ground-Truth from Field Visits
2.4.2. Geo-Tagged Street-Level Images
2.4.3. Accuracy Assessment
3. Results
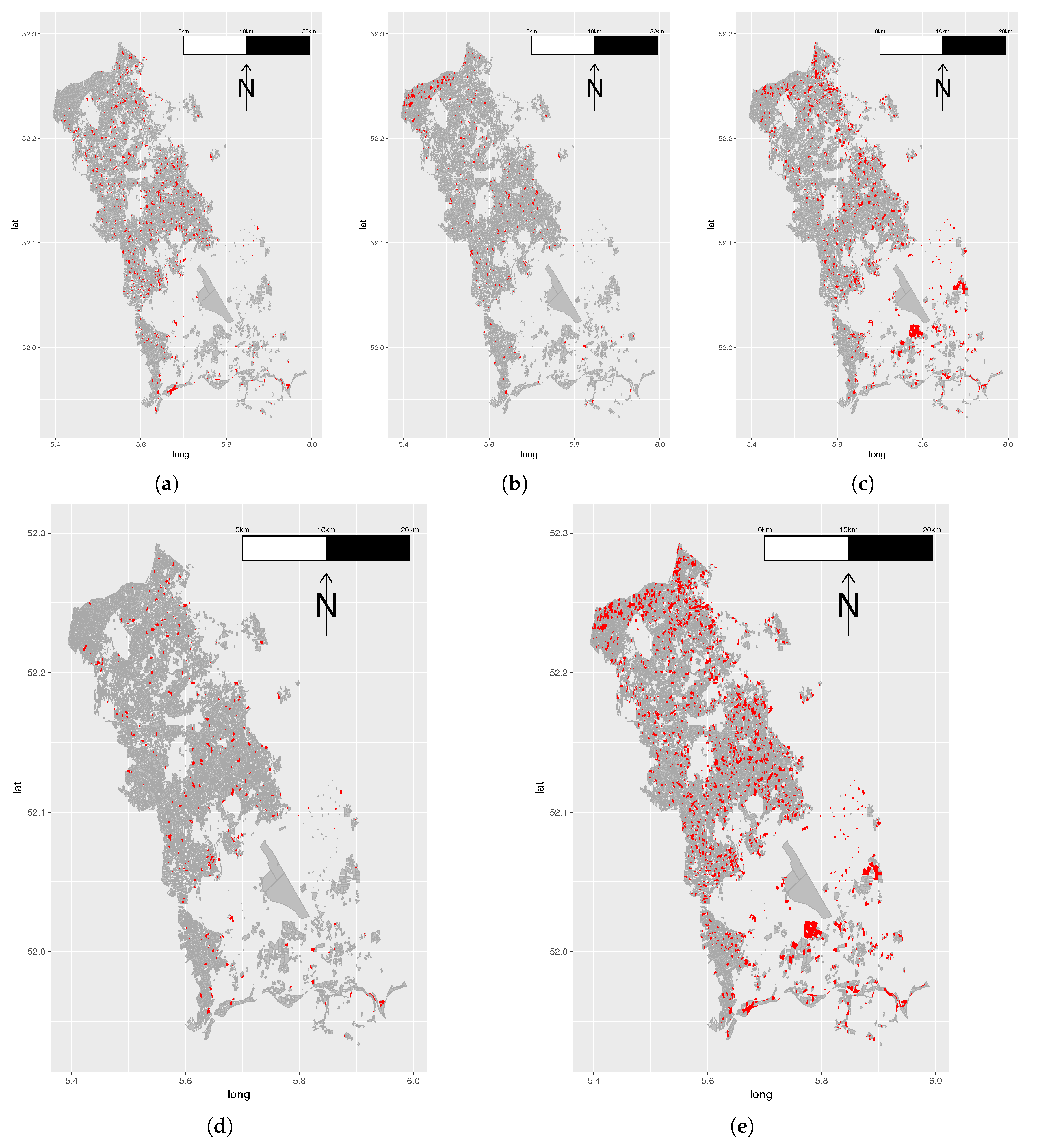
3.1. Satellite-Based Markers
3.2. Geo-Tagged Street Level Imagery
3.3. Accuracy Assessment
3.3.1. BRP2017 Assessment Using Ground-Truth
3.3.2. Assessment of Street-Level Pictures Tagging with the Ground-Truth
3.3.3. Markers’ Assessment Using the Ground-Truth
3.3.4. Assessment of the Markers with Geo-Tagged Street-Level Acquisitions
4. Discussion
4.1. Efficiency of the S1 and S2 Markers for Grassland Monitoring
4.1.1. Marker Concept
4.1.2. Evaluating Markers with Targeted Field Visits and Street-Level Images
4.1.3. Combination of S1 and S2
4.2. Processing Methodology
4.2.1. Tools, Coding Languages and Platforms
4.2.2. Need for Open-Access Parcel Identification
4.2.3. TensorFlow Training Improvement
4.3. Implications for CAP Monitoring
4.4. Street-Level Imagery
4.5. Code Sharing
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Code

Appendix B. Aggregation of Crop Class Label for the Ground-Truth

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Label (Dutch name) | Gewas Code |
|---|---|---|
| Grasslands (GRA) | Permanent grassland (Grasland, blijvend) Temporary grassland (Grasland, tijdelijk) Natural grassland. Main function: agriculture. (Grasland, natuurlijk. Hoofdfunctie landbouw.) Natural grassland. Main function: nature. (Grasland, natuurlijk. Hoofdfunctie natuur.) Natural grassland (Grasland, natuurlijk. Areaal met een natuurbeheertype) | 265 266 331 332 336 |
| Maize (MAI) | Green maize (Maïs, snij-) Grain maize (Maïs, korrel-) | 259 316 |
| Potatoes (POT) | Potatoes, starch (Aardappelen, zetmeel) | 2017 |
| Cereals (CER) | Summer wheat (Tarwe, zomer-) Winter barley (Gerst, winter-) Summer barley (Gerst, zomer-) Rye (Rogge (geen snijrogge)) | 234 235 236 237 |
| Other (OTH) | Alley trees/park trees, older/heavier trees (Laanbomen/parkbomen, opzetters, open grond) Peas, green/yellow Erwten, groene/gele (groen te oogsten) Spinach (Spinazie, zaden en opkweekmateriaal) | 1071 244 2774 |
References
- Ojima, D.S.; Dirks, B.O.; Glenn, E.P.; Owensby, C.E.; Scurlock, J.O. Assessment of C budget for grasslands and drylands of the world. Water Air Soil Pollut. 1993, 70, 95–109. [Google Scholar] [CrossRef]
- Rosen, C. World Resources 2000–2001: People and Ecosystems: The Fraying Web of Life; Elsevier: New York, NY, USA, 2000. [Google Scholar]
- Soussana, J.F.; Tallec, T.; Blanfort, V. Mitigating the greenhouse gas balance of ruminant production systems through carbon sequestration in grasslands. Animal 2010, 4, 334–350. [Google Scholar] [CrossRef] [PubMed]
- Intergovernmental Panel on Climate Change. 2006 IPCC Guidelines for National Greenhouse Gas Inventories; Eggleston, S., Buendia, L., Miwa, K., Ngara, T., Tanabe, K., Eds.; Institute for Global Environmental Strategies: Kanagawa, Japan, 2006. [Google Scholar]
- Bellarby, J.; Tirado, R.; Leip, A.; Weiss, F.; Lesschen, J.P.; Smith, P. Livestock greenhouse gas emissions and mitigation potential in Europe. Glob. Change Biol. 2013, 19-1, 3–18. [Google Scholar] [CrossRef] [PubMed]
- Alliance Environnement. Evaluation Study of the Payment for Agricultural Practices Beneficial for the Climate and the Environment; Technical Report; IEEP: Brussels, Belgium, 2017. [Google Scholar]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Immitzer, M.; Vuolo, F.; Atzberger, C. First experience with Sentinel-2 data for crop and tree species classifications in central Europe. Remote Sens. 2016, 8, 166. [Google Scholar] [CrossRef]
- Defourny, P.; Sophie, B.; Bellemans, N.; Cosmin, C.; Dedieu, G.; Guzzonato, E.; Hagolle, O.; Inglada, J.; Nicola, L.; Rabaute, T.; et al. Sentinel-2 near real-time agriculture monitoring at parcel level thanks to the Sen2-Agri automated system: methods and demonstration from local to national scale for cropping systems around the world. Remote Sens. Environ. 2018. under review. [Google Scholar]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep learning classification of land cover and crop types using remote sensing data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Tamm, T.; Zalite, K.; Voormansik, K.; Talgre, L. Relating Sentinel-1 interferometric coherence to mowing events on grasslands. Remote Sens. 2016, 8, 802. [Google Scholar] [CrossRef]
- Grant, K.; Siegmund, R.; Wagner, M.; Hartmann, S. Satellite-based assessment of grassland yields. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 15. [Google Scholar] [CrossRef]
- Santoro, M.; Wegmuller, U.; Askne, J.I. Signatures of ERS–Envisat interferometric SAR coherence and phase of short vegetation: An analysis in the case of maize fields. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1702–1713. [Google Scholar] [CrossRef]
- Wegmuller, U.; Werner, C. Retrieval of vegetation parameters with SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1997, 35, 18–24. [Google Scholar] [CrossRef]
- Griffiths, P.; Nendel, C.; Pickert, J.; Hostert, P. Towards national-scale characterization of grassland use intensity based on integrated Sentinel-2 and Landsat time series data. Remote Sens. Environ. 2018. under review. [Google Scholar]
- Veloso, A.; Mermoz, S.; Bouvet, A.; Le Toan, T.; Planells, M.; Dejoux, J.F.; Ceschia, E. Understanding the temporal behavior of crops using Sentinel-1 and Sentinel-2-like data for agricultural applications. Remote Sens. Environ. 2017, 199, 415–426. [Google Scholar] [CrossRef]
- European Commission DG AGRI. DS/CDP/2018/10: Guidance Document on the on-the-Spot Checks and Area Measurement. 2018. Available online: https://marswiki.jrc.ec.europa.eu/wikicap/images/3/39/DSCG-2014-32-FINAL_REV_4_OTSC_guideline_2018_CLEAN.pdf (accessed on 6 July 2018).
- Devos, W.; Fasbender, D.; Lemoine, G.; Loudjani, P.; Milenov, P.; Wirnhardt, C. Discussion Document on the Introduction of Monitoring to Substitute OTSC; Technical Report; European Commission: Brussels, Belgium, 2017; ISBN 978-92-79-74279-8. [Google Scholar]
- European Union. Commission implementing regulation (EU) 2018/746 of 18 May 2018 amending Implementing Regulation (EU) No 809/2014 as regards modification of single applications and payment claims and checks. Off. J. Eur. Union 2018, 61, L125-1-7. [Google Scholar]
- JRC. Wikicap-European Commission. Available online: https://marswiki.jrc.ec.europa.eu/wikicap/index.php/Main_Page (accessed on 24 December 2017).
- Nationaal Georegister. Basisregistratie Gewaspercelen (BRP). 2017. Available online: http://www.nationaalgeoregister.nl/geonetwork/srv/dut/catalog.search#/metadata/%7B25943e6ebb27-4b7a-b240-150ffeaa582e%7D (accessed on 24 December 2017).
- Invekos Schläge. 2017. Available online: http://gis.bmlfuw.gv.at/wmsgw-ds/?alias=e722906e-e559-4&request=GetDataFeed&id=ae690988-644c-4c25-bdee-bc7d1f4762ee (accessed on 29 December 2017).
- Jordbrugs Analyser: Geoserver Download. Available online: http://jordbrugsanalyser.dk/downloadside/index.html (accessed on 29 December 2017).
- Dickinson, J.L.; Zuckerberg, B.; Bonter, D.N. Citizen science as an ecological research tool: Challenges and benefits. Annu. Rev. Ecol. Evol. Syst. 2010, 41, 149–172. [Google Scholar] [CrossRef]
- Fritz, S.; See, L.; McCallum, I.; You, L.; Bun, A.; Moltchanova, E.; Duerauer, M.; Albrecht, F.; Schill, C.; Perger, C.; et al. Mapping global cropland and field size. Glob. Chang. Biol. 2015, 21, 1980–1992. [Google Scholar] [CrossRef] [PubMed]
- Gebru, T.; Krause, J.; Wang, Y.; Chen, D.; Deng, J.; Aiden, E.L.; Li, F. Using deep learning and google street view to estimate the demographic makeup of the us. arXiv 2017, arXiv:1702.06683. [Google Scholar]
- Acharya, A.; Fang, H.; Raghvendra, S. Neighborhood Watch: Using CNNs to Predict Income Brackets from Google Street View Images; Standford Report; Stanford University: Stanford, CA, USA, 2016. [Google Scholar]
- Andersson, V.O.; Birck, M.A.; Araujo, R.M. Investigating Crime Rate Prediction Using Street-Level Images and Siamese Convolutional Neural Networks. In Proceedings of the Latin American Workshop on Computational Neuroscience, Porto Alegre, Brazil, 22–24 November 2017; Springer: Cham, Switzerland, 2017; pp. 81–93. [Google Scholar]
- Krylov, V.A.; Kenny, E.; Dahyot, R. Automatic Discovery and Geotagging of Objects from Street View Imagery. arXiv 2017, arXiv:1708.08417. [Google Scholar] [CrossRef]
- Goel, R.; Garcia, L.M.; Goodman, A.; Johnson, R.; Aldred, R.; Murugesan, M.; Brage, S.; Bhalla, K.; Woodcock, J. Estimating city-level travel patterns using street imagery: A case study of using Google Street View in Britain. arXiv 2018, arXiv:1802.02915. [Google Scholar] [CrossRef] [PubMed]
- Iannelli, G.C.; Dell’Acqua, F. Extensive Exposure Mapping in Urban Areas through Deep Analysis of Street-Level Pictures for Floor Count Determination. Urban Sci. 2017, 1, 16. [Google Scholar] [CrossRef]
- Seiferling, I.; Naik, N.; Ratti, C.; Proulx, R. Green streets—Quantifying and mapping urban trees with street-level imagery and computer vision. Landsc. Urban Plan. 2017, 165, 93–101. [Google Scholar] [CrossRef]
- Li, X.; Zhang, C.; Li, W.; Ricard, R.; Meng, Q.; Zhang, W. Assessing street-level urban greenery using Google Street View and a modified green view index. Urban For. Urban Green. 2015, 14, 675–685. [Google Scholar] [CrossRef]
- Long, Y.; Liu, L. How green are the streets? An analysis for central areas of Chinese cities using Tencent Street View. PLoS ONE 2017, 12, e0171110. [Google Scholar] [CrossRef] [PubMed]
- Mapillary. Available online: https://www.mapillary.com/ (accessed on 24 December 2017).
- Juhász, L.; Hochmair, H.H. User contribution patterns and completeness evaluation of Mapillary, a crowdsourced street level photo service. Trans. GIS 2016, 20, 925–947. [Google Scholar] [CrossRef]
- Wu, B.; Li, Q. Crop planting and type proportion method for crop acreage estimation of complex agricultural landscapes. Int. J. Appl. Earth Obs. Geoinf. 2012, 16, 101–112. [Google Scholar] [CrossRef]
- Singha, M.; Wu, B.; Zhang, M. Object-based paddy rice mapping using HJ-1A/B data and temporal features extracted from time series MODIS NDVI data. Sensors 2016, 17, 10. [Google Scholar] [CrossRef] [PubMed]
- USGS. Global Croplands Street View Application. Available online: https://www.croplands.org/app/data/street (accessed on 27 March 2018).
- Xiong, J.; Thenkabail, P.S.; Gumma, M.K.; Teluguntla, P.; Poehnelt, J.; Congalton, R.G.; Yadav, K.; Thau, D. Automated cropland mapping of continental Africa using Google Earth Engine cloud computing. ISPRS J. Photogramm. Remote Sens. 2017, 126, 225–244. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Copernicus—Open Access Hub. Available online: https://scihub.copernicus.eu/ (accessed on 24 December 2017).
- ESA. SNAP, the Sentinel Toolboxes. Available online: http://step.esa.int/main/download/ (accessed on 24 December 2017).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Corbane, C.; Lemoine, G.; Pesaresi, M.; Kemper, T.; Sabo, F.; Ferri, S.; Syrris, V. Enhanced automatic detection of human settlements using Sentinel-1 interferometric coherence. Int. J. Remote Sens. 2018, 39, 842–853. [Google Scholar] [CrossRef]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. 2015. Available online: tensorflow.org (accessed on 16 August 2018).
- Song, C.; Woodcock, C.E.; Seto, K.C.; Lenney, M.P.; Macomber, S.A. Classification and change detection using Landsat TM data: When and how to correct atmospheric effects? Remote Sens. Environ. 2001, 75, 230–244. [Google Scholar] [CrossRef]
- Rikimaru, A.; Roy, P.; Miyatake, S. Tropical forest cover density mapping. Trop. Ecol. 2002, 43, 39–47. [Google Scholar]
- Avenza. Avenza Systems Inc.—GIS, Mapping and Cartography Software for Adobe Illustrator and Photoshop. Mobile Mapping with Avenza Maps on iOS, Android and Windows. Available online: https://www.avenza.com/avenza-maps/ (accessed on 13 December 2017).
- Mapillary. Multiple Camera Setups—Mapillary. 2017. Available online: https://help.mapillary.com/hc/en-us/articles/115001471709-Multiple-camera-setups (accessed on 10 December 2017).
- Housel, B. Mapping with Action Cameras, Mapillary, and OpenStreetMap. Available online: http://blog.mapillary.com/community/2017/01/31/mapping-with-action-cameras-mapillary-and-openstreetmap.html (accessed on 10 November 2017).
- Mapillary. Mapillary_Tools/Python at Master · Mapillary/Mapillary_Tools. 2017. Available online: https://github.com/mapillary/mapillary_tools/tree/master/mapillary_tools (accessed on 29 November 2017).
- Mapillary. Where’s My Data? How to Retrieve Mapillary Images to Use in External Tools. Available online: https://blog.mapillary.com/product/2017/04/12/how-to-retrieve-mapillary-images-to-use-in-external-tools.html (accessed on 28 November 2017).
- Strahler, A.H.; Boschetti, L.; Foody, G.M.; Friedl, M.A.; Hansen, M.C.; Herold, M.; Mayaux, P.; Morisette, J.T.; Stehman, S.V.; Woodcock, C.E. Global Land Cover Validation: Recommendations for Evaluation and Accuracy Assessment of Global Land Cover Maps; European Communities: Luxembourg, 2006; Volume 51. [Google Scholar]
- Zebker, H.A. User-Friendly InSAR Data Products: Fast and Simple Timeseries Processing. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2122–2126. [Google Scholar] [CrossRef]
- Doxani, G.; Vermote, E.; Roger, J.C.; Gascon, F.; Adriaensen, S.; Frantz, D.; Hagolle, O.; Hollstein, A.; Kirches, G.; Li, F.; et al. Atmospheric correction inter-comparison exercise. Remote Sens. 2018, 10, 352. [Google Scholar] [CrossRef]
- GDAL/OGR Contributors. GDAL/OGR Geospatial Data Abstraction Software Library; Open Source Geospatial Foundation: Chicago, IL, USA, 2018. [Google Scholar]
- Achanta, R.; Süsstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4895–4904. [Google Scholar]
- Gorelick, N. Image Segmentation and OBIA (Gorelick)—Google Slides. 2018. Available online: https://docs.google.com/presentation/d/1p_W06MwdhRFZjkb7imYkuTchatY5nxb5aTRgh6qm2uU/view#slide=id.p (accessed on 19 June 2018).
- Kokaly, R.F.; Clark, R.N.; Swayze, G.A.; Livo, K.E.; Hoefen, T.M.; Pearson, N.C.; Wise, R.A.; Benzel, W.M.; Lowers, H.A.; Driscoll, R.L.; et al. USGS Spectral Library Version 7; Technical Report; US Geological Survey: Reston, VA, USA, 2017. [Google Scholar]
- Chen, T.; Goodfellow, I.; Shlens, J. Net2net: Accelerating learning via knowledge transfer. arXiv 2015, arXiv:1511.05641. [Google Scholar]
- Laso Bayas, J.C.; See, L.; Fritz, S.; Sturn, T.; Perger, C.; Dürauer, M.; Karner, M.; Moorthy, I.; Schepaschenko, D.; Domian, D.; et al. Crowdsourcing in-situ data on land cover and land use using gamification and mobile technology. Remote Sens. 2016, 8, 905. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Li, F. Imagenet: A large-scale hierarchical image database. In Proceedings of the IEEE Conference on the Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- European Union. Regulation (EU) 2016/679 of the European Parliament and of the Council of 27 April 2016 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data, and repealing Directive 95/46/EC (General Data Protection Regulation). Off. J. Eur. Union 2016, L119, 1–88. [Google Scholar]






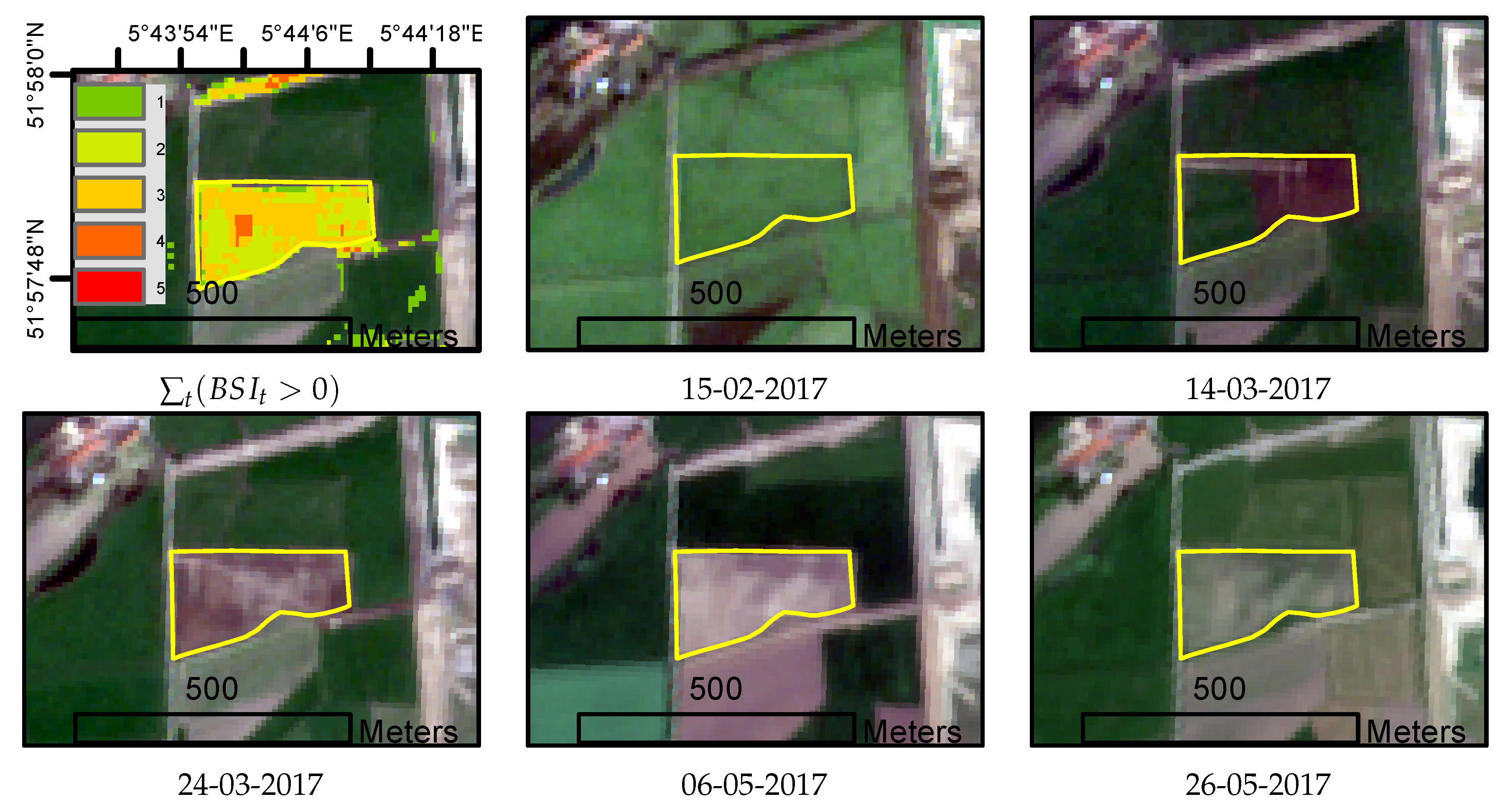
| 15-02-2017 | 14-03-2017 | |
| 24-03-2017 | 06-05-2017 | 26-05-2017 |


| Marker | S1 Backscatter | S1 Coherence | S2 BSI |
|---|---|---|---|
| S1 backscatter | x | ||
| S1 coherence | x | ||
| S2 BSI | x | ||
| S1 AND S2 | x | x | x |
| x | x | ||
| x | x | ||
| S1 OR S2 | x | ||
| x | |||
| x |
| j = Columns (Reference) | Row Total | ||||
|---|---|---|---|---|---|
| i = Rows (Classification) | 1 | 2 | k | ||
| 1 | |||||
| 2 | |||||
| k | |||||
| Column Total | n | ||||
| Ground or Street-Level | |||
|---|---|---|---|
| Grassland | Not Grassland | ||
| Markers | grassland | TP | FP |
| not grassland | FN | TN | |
| Class | Parcel Area | Parcel Count | Training Sample | |||
|---|---|---|---|---|---|---|
| Area (Ha) | Area (%) | Number | Number (%) | Number per Class | Percent per Class | |
| GRA | 18,629 | 68.90 | 11,773 | 76.47 | 300 | 2.55 |
| MAI | 507 | 18.75 | 2637 | 17.13 | 300 | 11.38 |
| CER | 451 | 1.67 | 198 | 1.29 | 109 | 55.05 |
| POT | 371 | 1.37 | 116 | 0.75 | 0 | 0.00 |
| OTH | 2517 | 9.31 | 671 | 4.36 | 0 | 0.00 |
| TOTAL | 27,039 | 100.00 | 15,395 | 100.00 | 709 | 4.6 |
| Markers | Marked N (Percent) |
|---|---|
| S1 backscatter | 1002 (8.51%) |
| S1 coherence | 345 (2.93%) |
| S2 BSI | 1064 (9.03%) |
| S1 AND S2 | 303 (2.57%) |
| S1 OR S2 | 2015 (17.12%) |
| Class | Street-Level Observation | Percentage of the Total |
|---|---|---|
| (N Fields) | (%) | |
| CER | 11 | 0.78 |
| GRA | 1157 | 82.00 |
| MAI | 192 | 13.61 |
| OTH | 48 | 3.40 |
| POT | 3 | 0.21 |
| TOTAL | 1411 | 100 |
| Ground-Truth | Metrics | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| CER | GRA | MAI | OTH | POT | TOTAL | UA | PA | F-Score | |
| CER | 1 | 0 | 1 | 2 | 0 | 4 | 1.00 | 0.25 | 0.40 |
| GRA | 0 | 130 | 9 | 5 | 0 | 144 | 0.99 | 0.90 | 0.95 |
| MAI | 0 | 0 | 78 | 0 | 0 | 78 | 0.89 | 1.00 | 0.94 |
| OTH | 0 | 1 | 0 | 2 | 0 | 3 | 0.22 | 0.67 | 0.33 |
| POT | 0 | 0 | 0 | 0 | 2 | 2 | 1.00 | 1.00 | 1.00 |
| TOTAL | 1 | 131 | 88 | 9 | 2 | 231 | - | - | - |
| Interpreter | Picture Suitable | Need Other Picture | Not Visible | |||
|---|---|---|---|---|---|---|
| (N) | (%) | (N) | (%) | (N) | (%) | |
| 1 | 178 | 83 | 32 | 15 | 4 | 2 |
| 2 | 207 | 97 | 2 | 1 | 5 | 2 |
| 3 | 149 | 70 | 50 | 23 | 15 | 7 |
| Interpreter | 1 | 2 | 3 |
|---|---|---|---|
| Overall accuracy | 92.06 | 92.06 | 88.79 |
| Kappa | 84.94 | 84.85 | 79.59 |
| Interpreter | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | |||||||
| Class | UA | PA | F_Score | UA | PA | F_score | UA | PA | F_Score |
| GRA | 0.97 | 0.94 | 0.95 | 0.97 | 0.94 | 0.96 | 0.94 | 0.93 | 0.94 |
| MAI | 0.94 | 0.96 | 0.95 | 0.94 | 0.94 | 0.94 | 0.90 | 0.97 | 0.93 |
| Markers | TP | FP | FN | TN | Sensitivity | Specificity | Precision | Accuracy | F-Score |
|---|---|---|---|---|---|---|---|---|---|
| S1 backscatter | 90 | 2 | 40 | 12 | 0.69 | 0.86 | 0.98 | 0.71 | 0.81 |
| S1 coherence | 91 | 7 | 39 | 7 | 0.70 | 0.50 | 0.93 | 0.68 | 0.80 |
| S2 BSI | 72 | 2 | 58 | 12 | 0.55 | 0.86 | 0.97 | 0.58 | 0.71 |
| S1 AND S2 | 109 | 2 | 21 | 12 | 0.84 | 0.86 | 0.98 | 0.84 | 0.90 |
| S1 OR S2 | 20 | 1 | 110 | 13 | 0.15 | 0.93 | 0.95 | 0.23 | 0.26 |
| Marker | Marked | Marked with Street-Level | Marked with Street-Level Where Tagging Was Possible | Tagged Marked and Non-Marked Street-Level Samples |
|---|---|---|---|---|
| S1 backscatter | 1002 | 104 | 92 | 184 |
| S1 coherence | 345 | 51 | 49 | 98 |
| S2 BSI | 1064 | 109 | 95 | 190 |
| S1 AND S2 | 303 | 34 | 32 | 64 |
| S1 OR S2 | 2015 | 219 | 193 | 386 |
| Markers | TP | FP | FN | TN | Sensitivity | Specificity | Precision | Accuracy | F-Score |
|---|---|---|---|---|---|---|---|---|---|
| S1 backscatter | 92 | 0 | 82 | 10 | 0.53 | 1.00 | 1.00 | 0.55 | 0.69 |
| S1 coherence | 47 | 2 | 44 | 5 | 0.52 | 0.71 | 0.96 | 0.53 | 0.67 |
| S2 BSI | 95 | 0 | 84 | 11 | 0.53 | 1.00 | 1.00 | 0.56 | 0.69 |
| S1 AND S2 | 32 | 0 | 23 | 9 | 0.58 | 1.00 | 1.00 | 0.64 | 0.74 |
| S1 OR S2 | 193 | 0 | 180 | 13 | 0.52 | 1.00 | 1.00 | 0.53 | 0.68 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Andrimont, R.; Lemoine, G.; Van der Velde, M. Targeted Grassland Monitoring at Parcel Level Using Sentinels, Street-Level Images and Field Observations. Remote Sens. 2018, 10, 1300. https://doi.org/10.3390/rs10081300
D’Andrimont R, Lemoine G, Van der Velde M. Targeted Grassland Monitoring at Parcel Level Using Sentinels, Street-Level Images and Field Observations. Remote Sensing. 2018; 10(8):1300. https://doi.org/10.3390/rs10081300
Chicago/Turabian StyleD’Andrimont, Raphaël, Guido Lemoine, and Marijn Van der Velde. 2018. "Targeted Grassland Monitoring at Parcel Level Using Sentinels, Street-Level Images and Field Observations" Remote Sensing 10, no. 8: 1300. https://doi.org/10.3390/rs10081300
APA StyleD’Andrimont, R., Lemoine, G., & Van der Velde, M. (2018). Targeted Grassland Monitoring at Parcel Level Using Sentinels, Street-Level Images and Field Observations. Remote Sensing, 10(8), 1300. https://doi.org/10.3390/rs10081300