3.1. Wave Field
By collecting the data of surface waves under differing wind conditions, the ocean wave spectra were established to describe the wave energy distribution for different wave frequencies. The Pierson-Moskowitz spectrum, which defines a wave spectrum for a fully developed sea, is given by:
where
is wave frequency,
is equal to 8.1 × 10
−3,
g is the gravitational acceleration, and
U is the wind speed at an elevation of 19.5 m above sea surface. The significant wave height
and the wave frequency at the spectral peak
can be deduced with Equation (14) and expressed by the following equations:
Table 1 shows the characteristics of ocean waves at the spectral peaks under wind conditions from 8–18 m/s. The wavelength
is calculated with dispersion relation for deep water (
d = 1000 m). The wave at the spectral peak is dominant because it has more energy than the others. The dominant wave generated by the 8 m/s wind is used first.
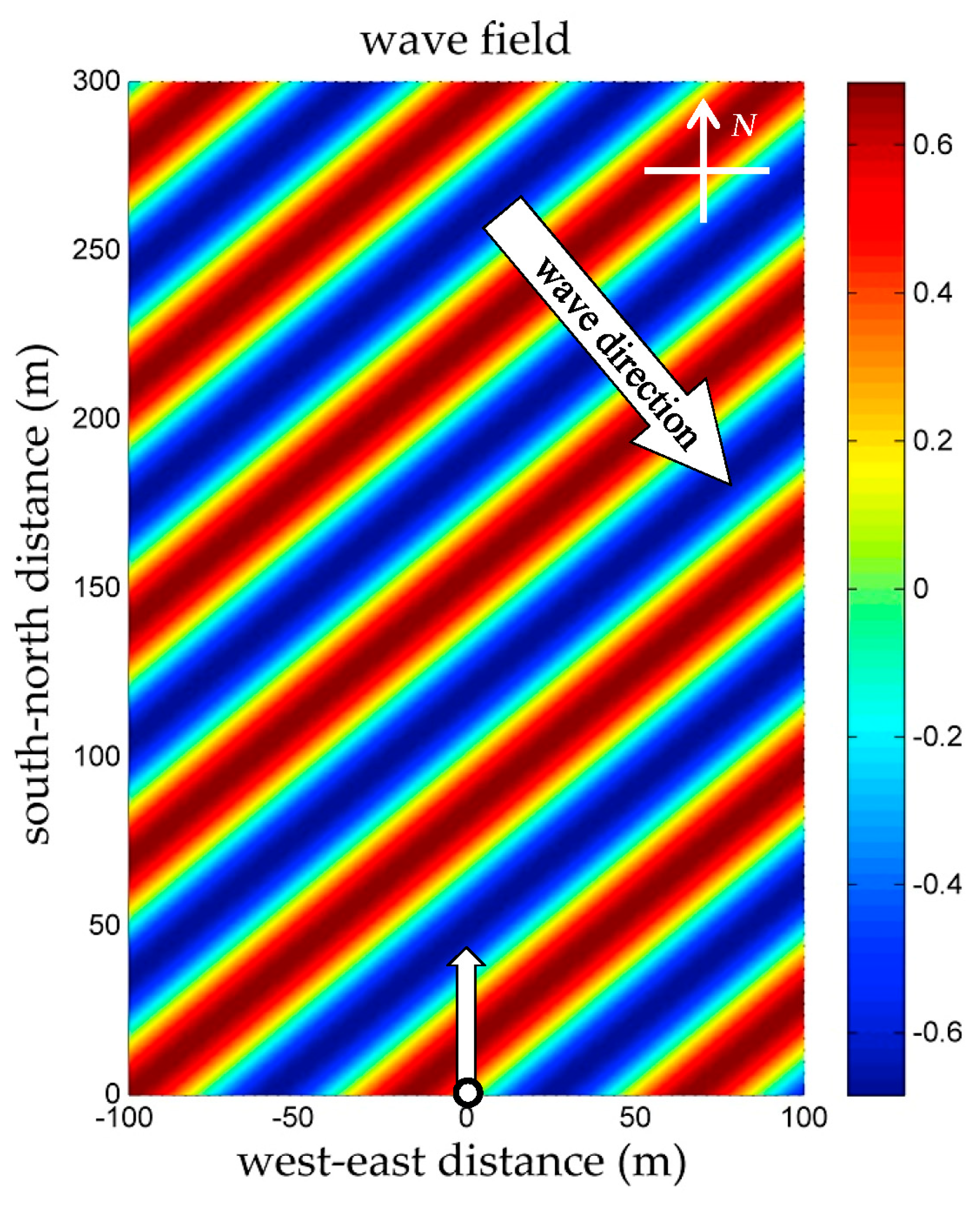
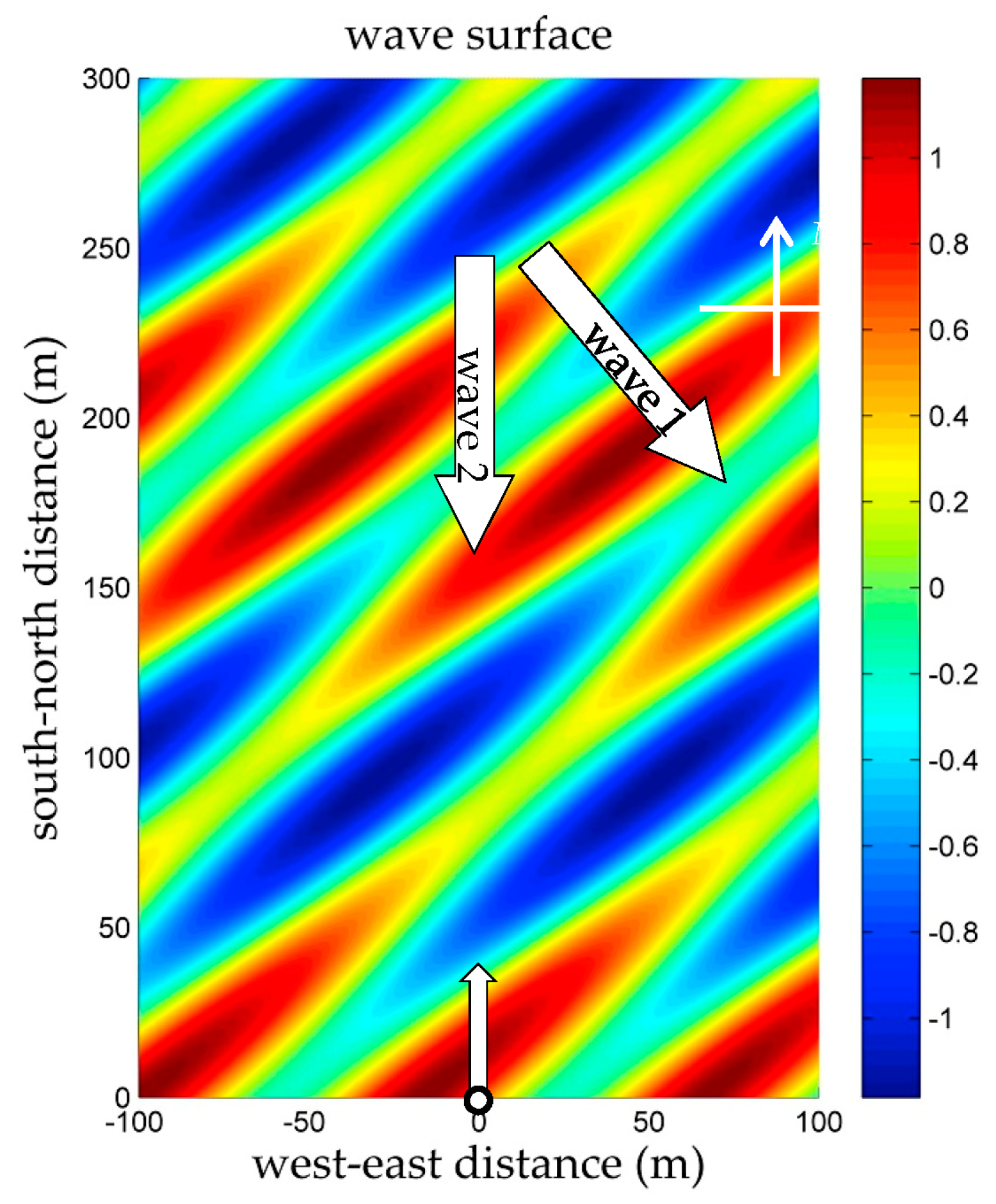
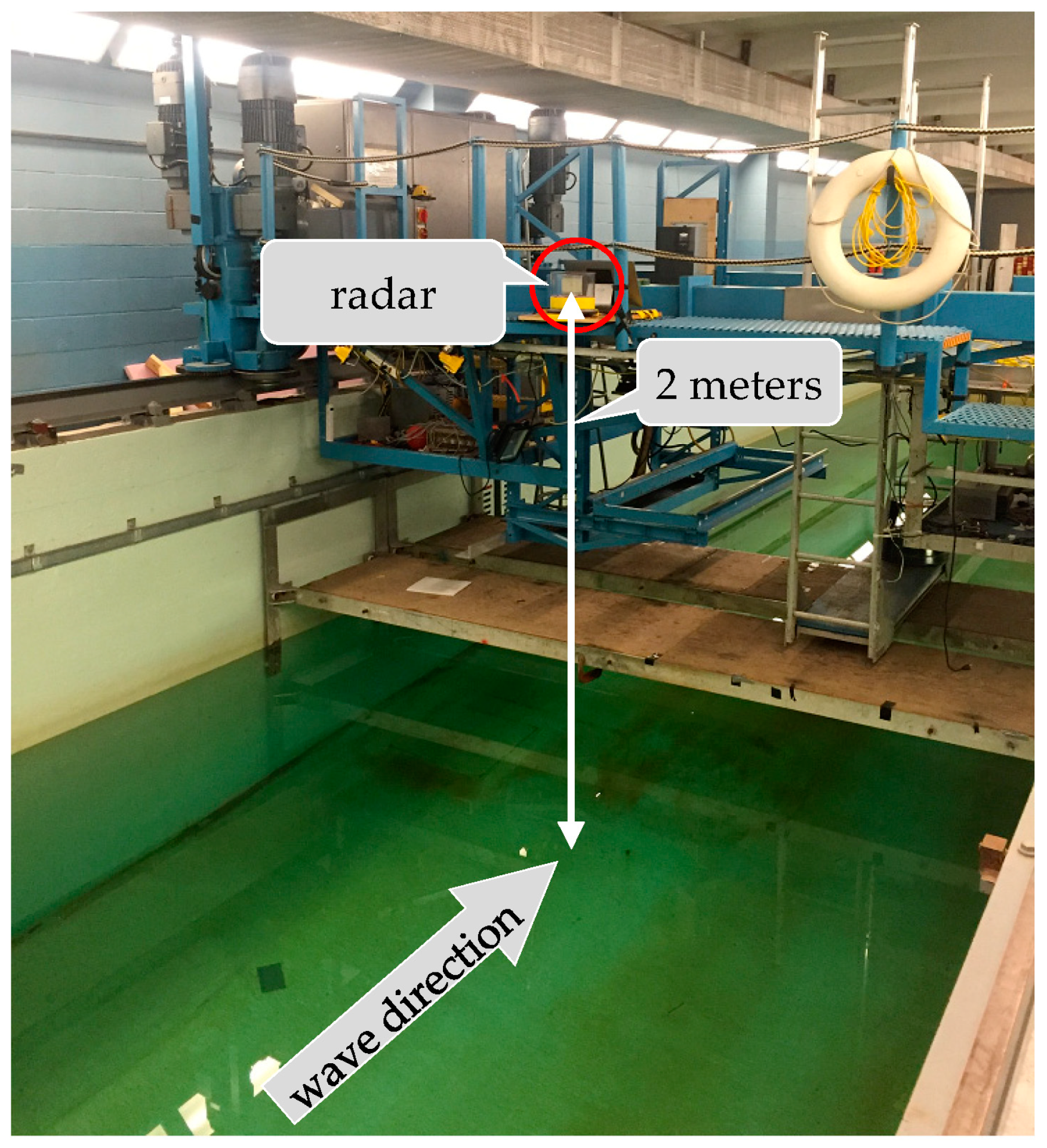
Figure 4 shows the wave field with the generated ocean waves.
The modeled sea surface size is 200 m × 300 m, and the unit facet size is 1 m × 1 m. The wave is propagating towards 140 degrees, indicated with the upper arrow. The colored stripes reveal the waveform. The radar transceiver is set 2 m above the sea level and horizontally points to the north. The small black circle at (0, 0) is its location and the lower arrow indicates the direction of the radar transceiver. Each facet is much smaller than the waves and the orbital velocities of the points in one facet are nearly identical. In addition to the waves shown in the wave field, there are also wind-generated capillary waves which are not shown in the wave field but generate backscatter. Therefore, the facets at the surface are not only orbiting with the gravity waves but also scattering radar signals back to the radar. The impacts of capillary waves will be incorporated in the calculation of RCS of sea surface.
3.2. Radar IF Output Signal
The
IF output signal is regarded as the sum of all the
IF components that are received from all facets at the sea surface in
Figure 4 and already processed through the radar transceiver. The
IF component from each facet is given by Equation (3). The Doppler shift frequency
can be calculated by Equation (8). It should be noted that the angle to wave
must be included in the calculation. The phases of incidence and scattered waves in a single facet have possible values ranging from 0 to
since the radar wavelength
is much less than the facet size. Therefore, the phase
of each
IF component from one facet has a random value in [0,
]. The power of the
IF component is calculated using the radar power equation, expressed by Equation (4).
The radar transmitter gain
is the antenna pattern gains, while the radar receiver gain
is composed of the global antenna gain, the amplifier gain and the antennae pattern gains [
25]. They are expressed as:
where
and
are respectively the gains of transmitter and receiver in a direction denoted by the azimuth angle
and elevation angle
.
and
are antenna pattern gains in the azimuth and elevation, respectively,
and
are the global antenna gain and total gain of the amplifiers, respectively. All the gains in Equations (16) and (17) have values in decibels. In the numerical simulation, the antenna pattern gains of
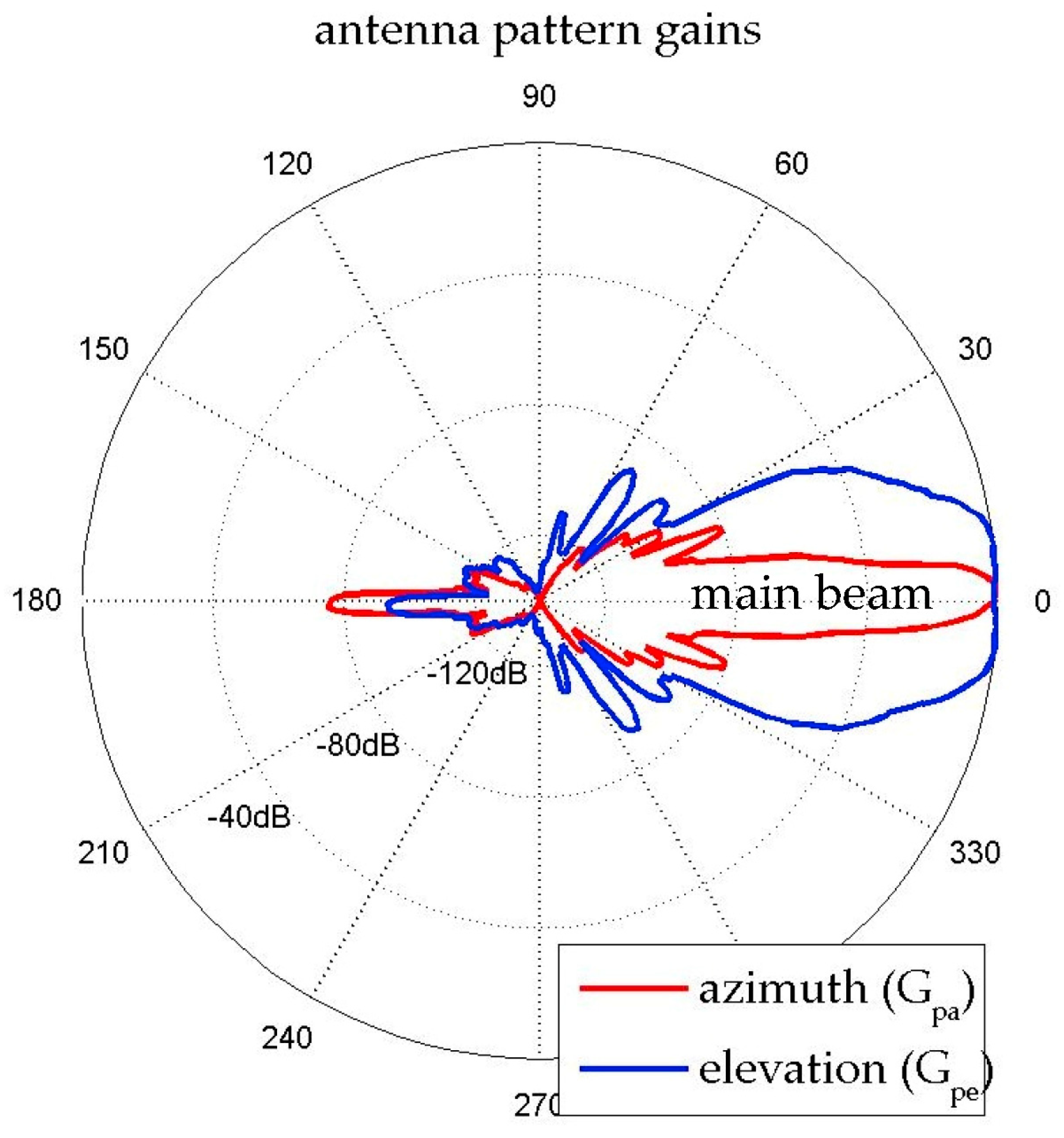
VV (vertical transmit and vertical receive) polarized K-MC3 transceiver module made by RFbeam Microwave GmbH in St. Gallen, Switzerland will be used, which transmits 24 GHz continuous wave with narrow beam widths, seven degrees in azimuth and 25 degrees in elevation, as shown in
Figure 5. The seven-degree beam width in the azimuth enables the radar transceiver to transmit and receive in a specified direction; and the 25 degrees beam width in elevation includes not only the far facets but also the close ones at the sea surface.
Another important parameter in Equation (4) is the sea surface RCS
. The microwave backscattering from the sea surface has been investigated by many researchers. One of the dominant scattering mechanisms at microwave frequencies and low-to-medium grazing angle is Bragg scattering, and non-Bragg scattering from the breaking waves was also observed and studied at a low-grazing angle [
26,
27,
28,
29]. According to the electromagnetic scattering perturbation theory, the first-order backscatter cross-sections were established in [
30]. The radar cross-section for backscattering from capillary waves for
VV and
HH (horizontal transmit and horizontal receive) polarization and the results of measurements in the wind wave tank with an X-band radar was introduced in [
31]. A mathematical model of normalized radar cross-section (NRCS) for Bragg backscattering and breaking wave in equilibrium conditions was presented in [
32]. Microwave Doppler spectra models based on Bragg-scattering and composite-surface theory were developed and used to show backscattering from rough water surfaces under many wind speed and incidence angle conditions [
33]. The backscattering mechanism from rough sea surface for both Ku- and C-bands was studied with the small-slope approximation method and a theoretical model for numerical calculations of a radar backscattering cross section was presented in [
34].
The transceiver module has
VV polarization so that the backscattering is dominated by Bragg scattering. Therefore, we use the mathematical model of NRCS for Bragg backscattering established under equilibrium condition [
32]:
where
is the attenuation coefficient,
the direction of observation relative to wind,
the incidence angle,
the friction velocity,
the radar wavenumber, and
the first-order scattering coefficient for
VV polarization [
35]:
where
is the relative complex dielectric constant of sea water. Although the NRCS model was established for equilibrium conditions, Phillips compared it with some radar experiments and concluded that it can be extended to a wide range of applications.
Table 2 shows the parameters used for the NRCS calculation.
Here,
is the relative dielectric constant for sea water with salinity of 35 ppt and a temperature of 0 °C [
36],
is a measured value with 7.3 m/s wind speed [
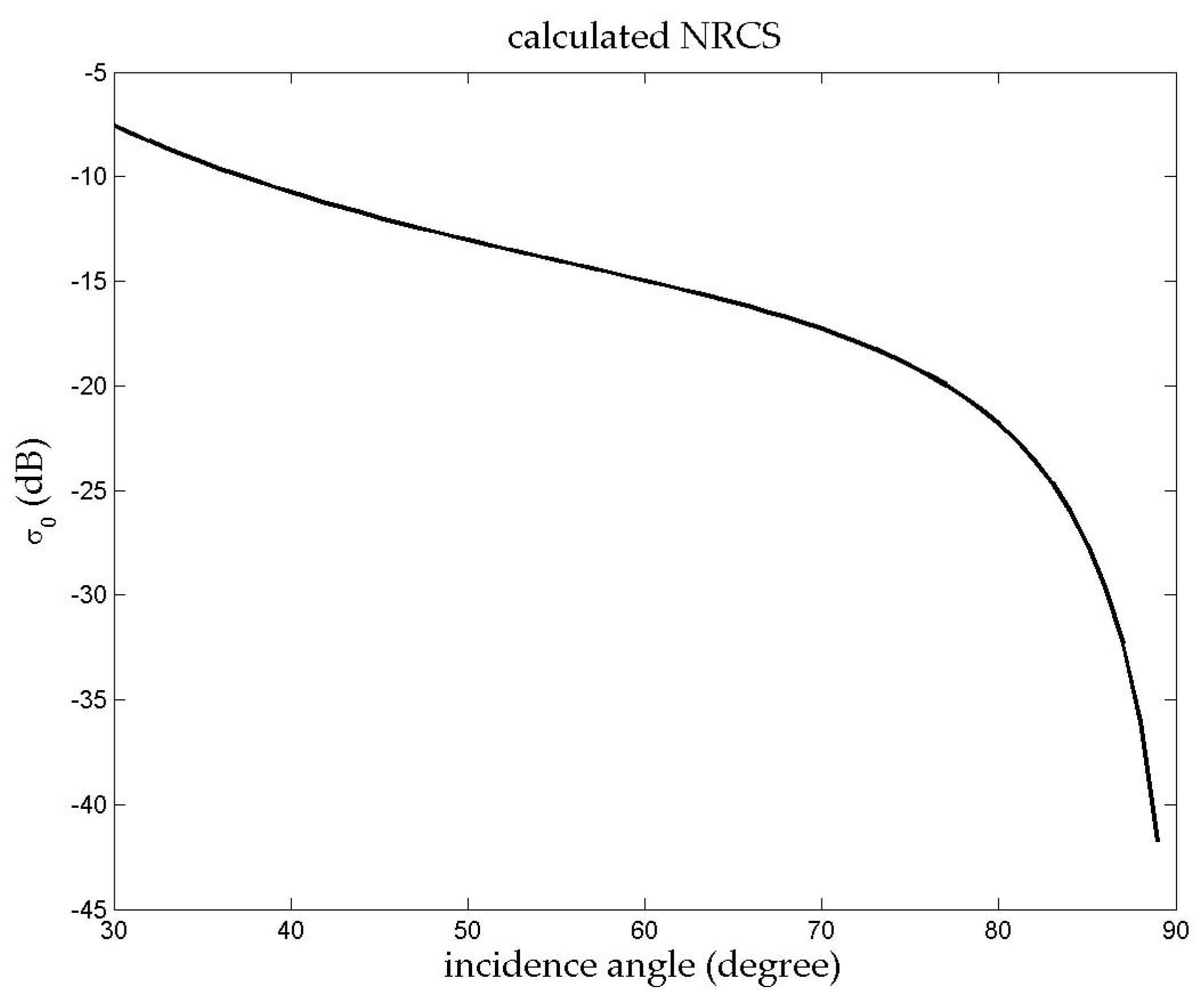
37]. The calculated NRCS is shown in
Figure 6. The value at 90-degree is not shown in the figure because of much lower than others. The backscattering from the simulated sea surface is weak because the radar transceiver transmits and receives at a low-grazing angle, i.e., most of the incidence angles to the facets are approaching 90 degrees. Therefore, depressing the radar transceiver slightly is recommended to increase the radar grazing angle. Here the grazing angle is five degrees.
Table 3 shows the parameters of numerical simulation conditions about ocean wave, wave field, radar transceiver, and
IF signal.
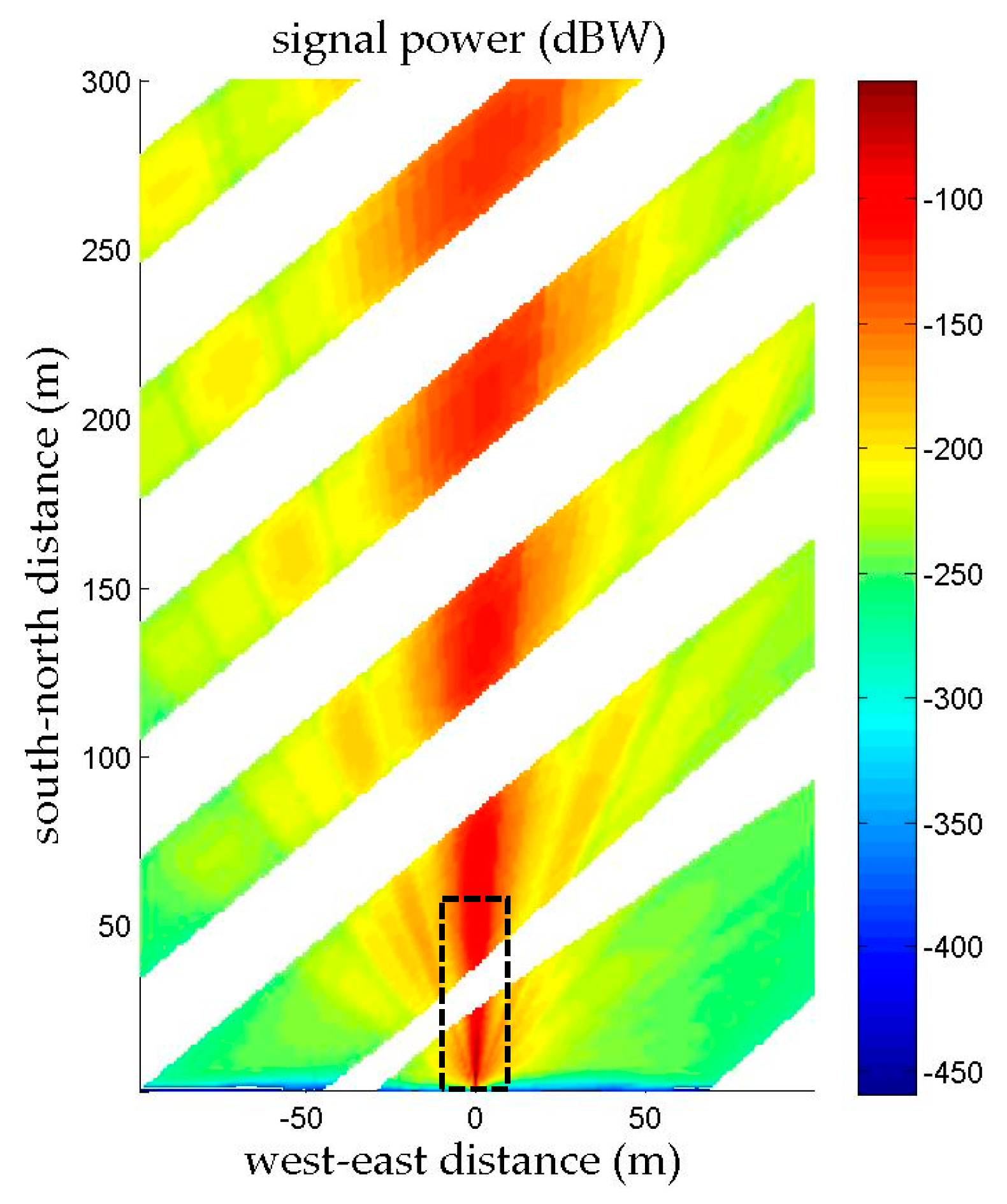
For the given simulation conditions, the
IF component power from each facet can be determined from Equation (4). The
IF component power distribution, as shown in
Figure 7, is obtained if the
IF component powers are laid out on the wave field. The blank areas are the geometric shadows in which the facets cannot be seen by the radar transceiver. For microwave backscattering, partial shadowing [
38] may cause some signals from the geometrically shadowed areas. However, they are invisible and below the noise floor because of low incident power. The warm color areas, which stand for the relatively strong scattering, are confined within the narrow azimuthal beam width of the radar transceiver.
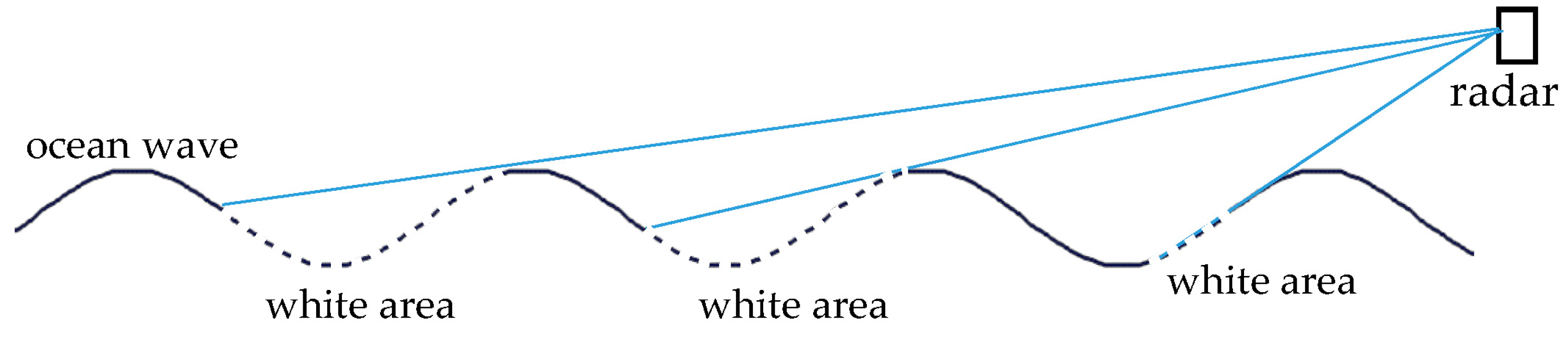
From the geometric viewpoint, the closer the wave approaches to the radar, the more surface of the wave the radar can see (see
Figure 8). Thus, the white area at shorter range is narrower than those at longer ranges. Contrarily, the white areas are gradually getting wider at long range, as shown in
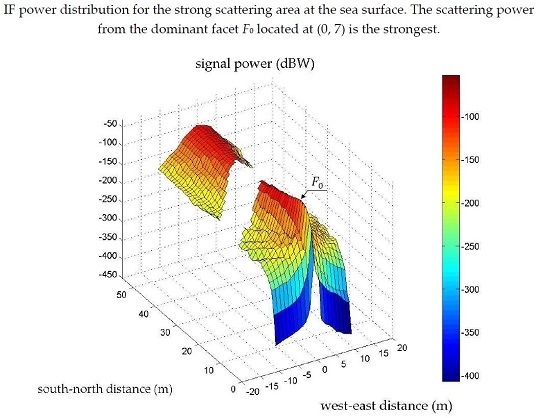
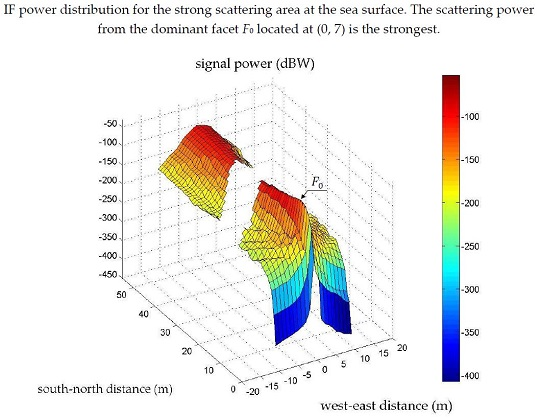
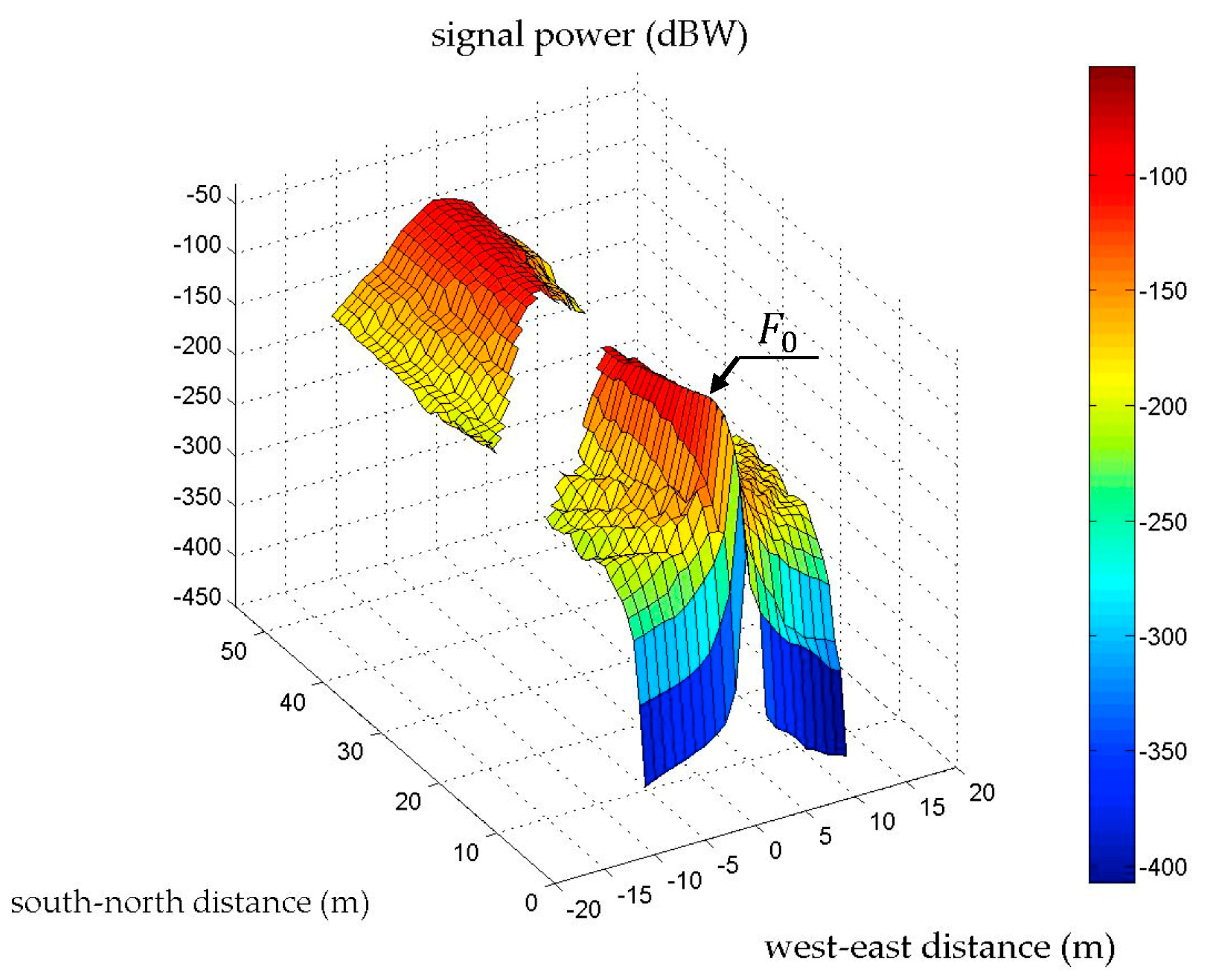
Figure 7. Strong scattering appears at locations close to the radar transceiver, and
Figure 9 shows the 3-D plot of the
IF power distribution of the strong scattering area which is marked as the dashed rectangle with a size of 55 m × 20 m in
Figure 7.
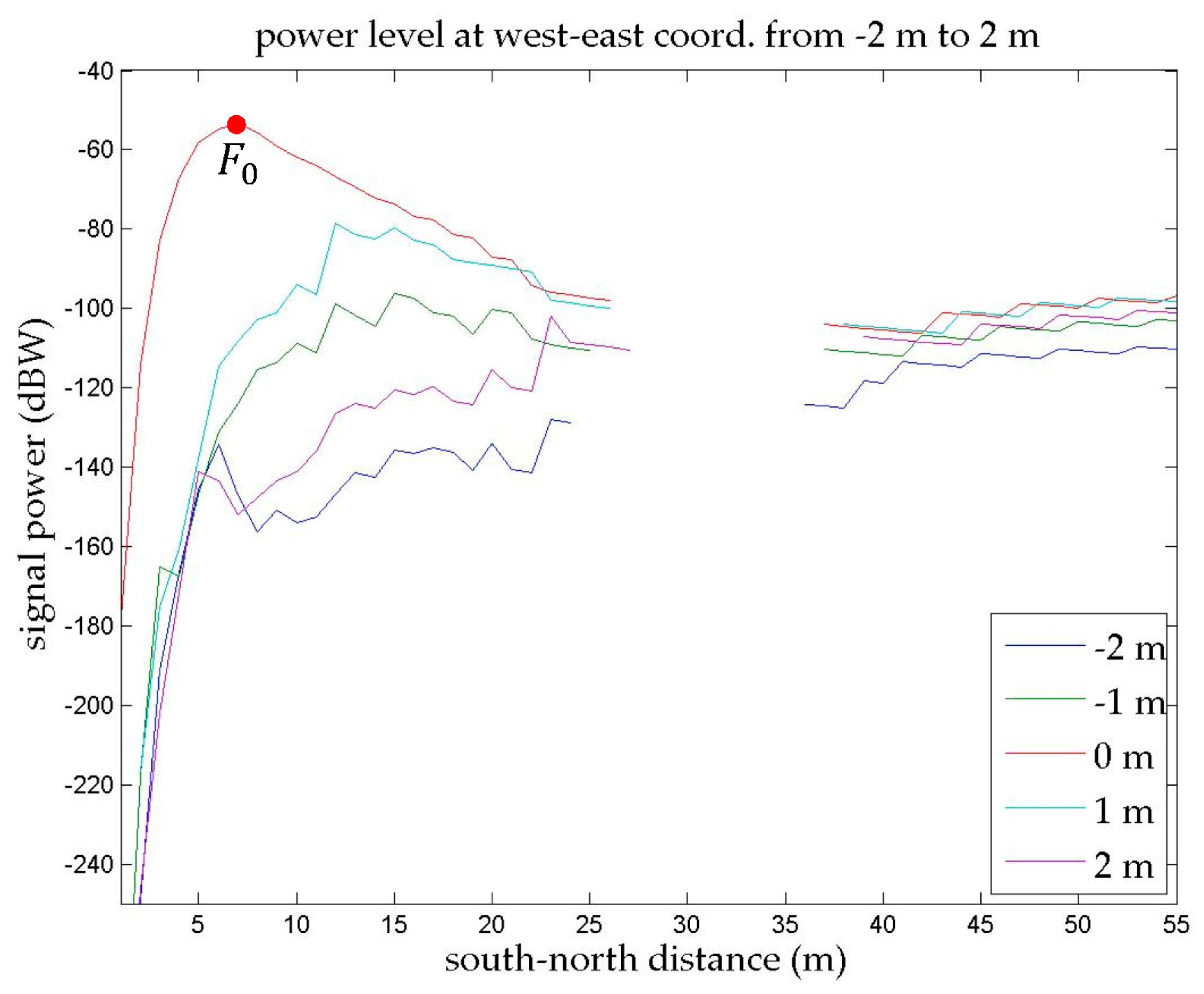
Figure 10 shows the powers distribution with the west-east coordinates from −2 m to 2 m. The power level at dominant facet the
is much higher than for the side facets whose coordinates are −2 m, −1 m, 1 m, and 2 m.
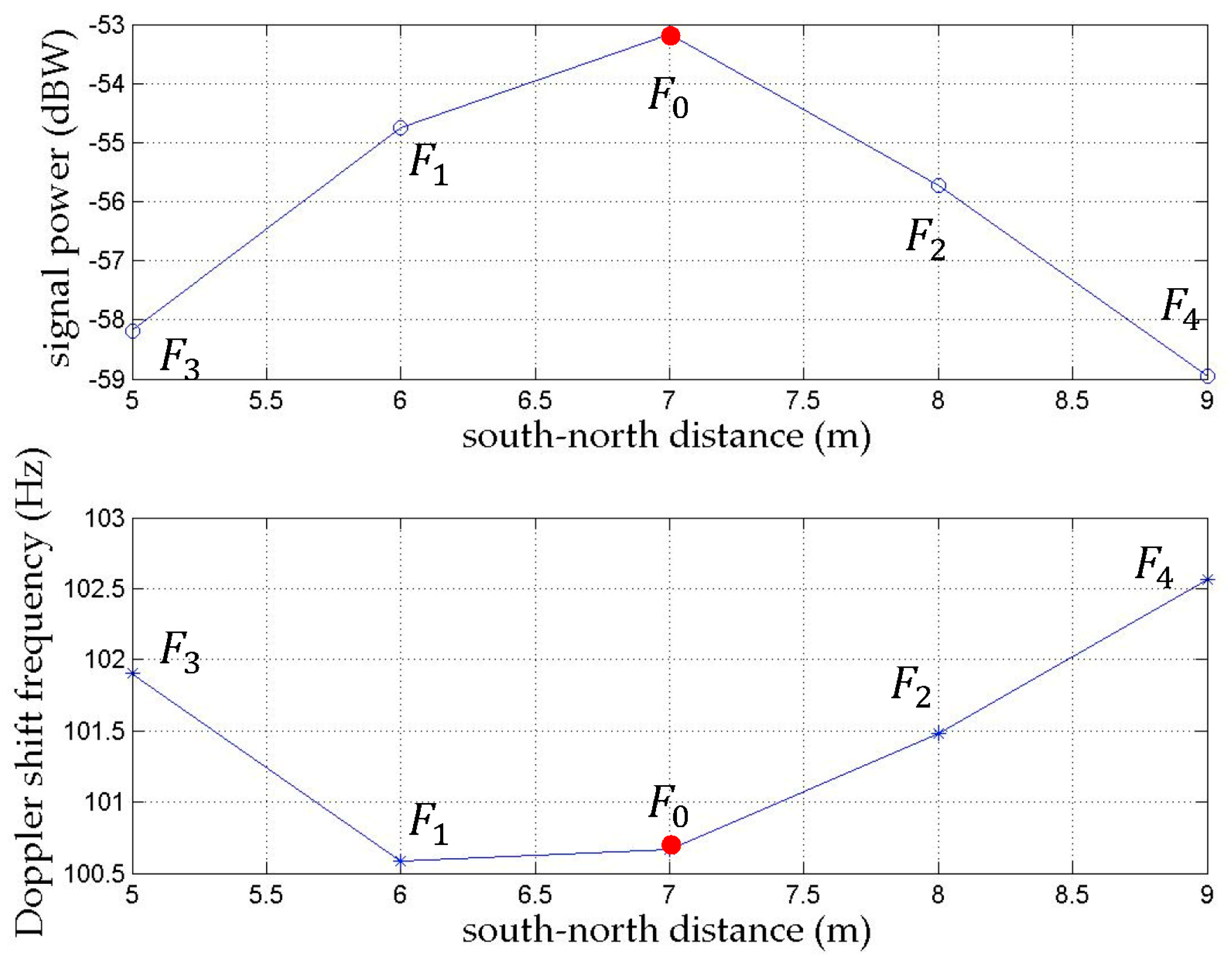
Figure 11 shows the power levels and Doppler shift frequencies of dominant facet
and its four adjacent facets with the west-east coordinate being 0 m. The power of
is not much higher than that of the two facets next to it,
and
, but the Doppler shift frequencies of these three facets are almost same. However, the power of
is much higher than that of the two facets
and
.
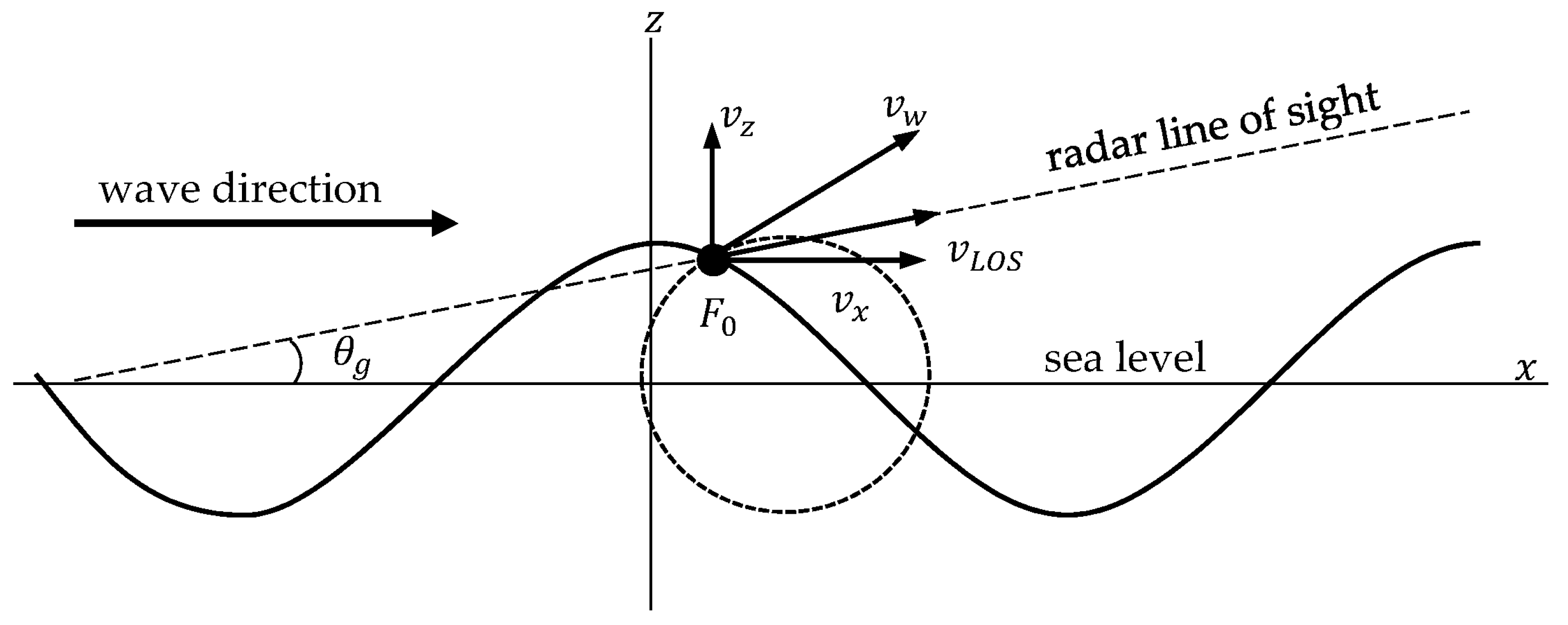
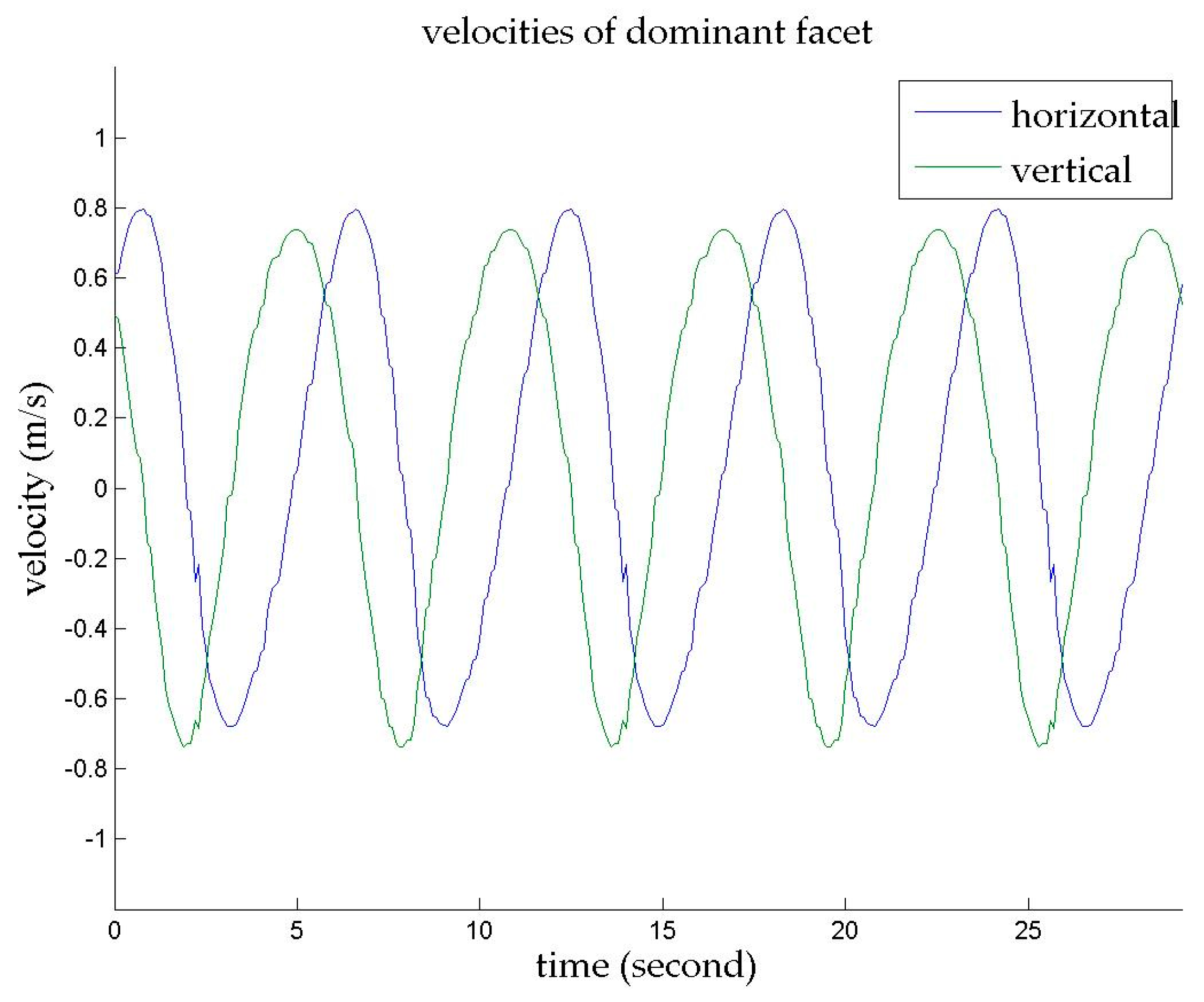
Figure 12 shows the horizontal velocity and vertical velocity of the dominant facet
in five wave periods (29.25 s). The curves are sinusoids and oscillate with same amplitude, and the phase difference is
π/2. Therefore, the motions of the dominant facet
represent the orbital motions of the generated ocean waves.
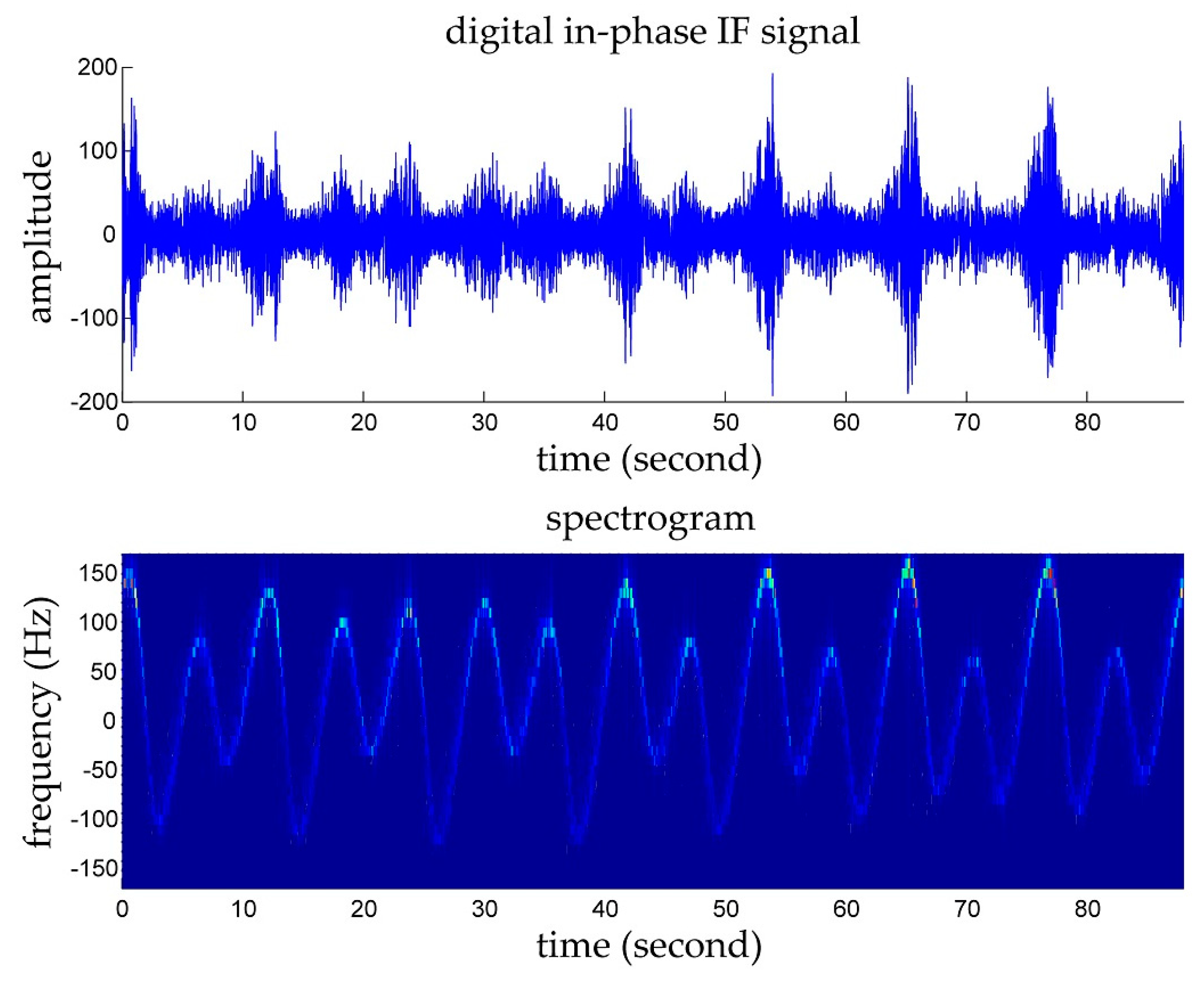
3.3. Signal Processing and Results
The calculations of the power
, frequency
, and phase
of the
IF component originated from each facet of the simulated ocean waves have been introduced. The total
IF signal is the sum of the
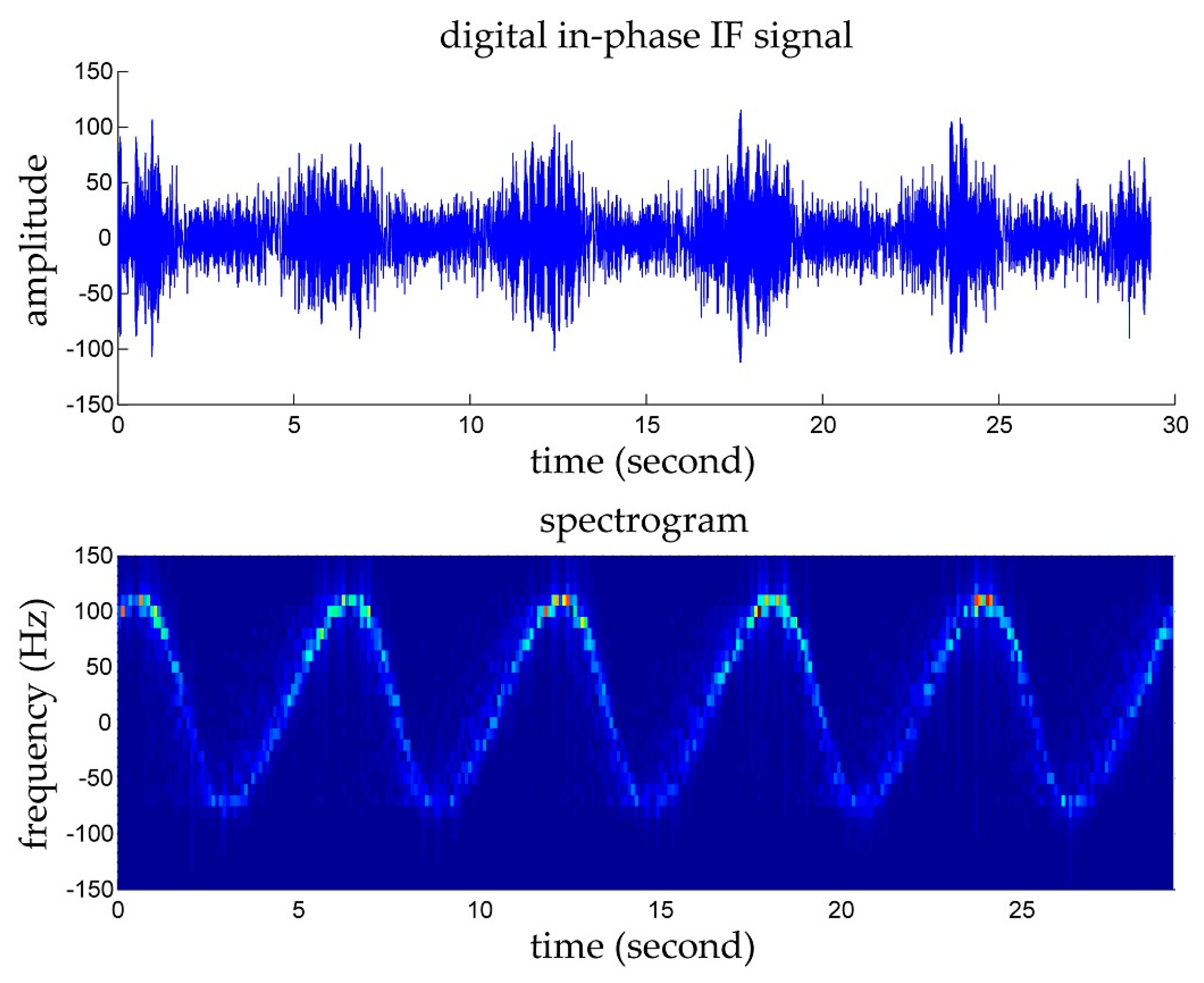
IF components and noise components. The
IF signal and its spectrogram are shown in
Figure 13. In the spectrogram, a bright line appears and is almost synchronized with the horizontal velocity of the dominant facet
in
Figure 12. This implies that the dominant facet
dominates the received power from the simulated sea surface, and the bright line illustrates the variation of the Doppler shift frequency caused by the motions of the dominant facet
. The bright line is extracted by finding the maximum value at each moment.
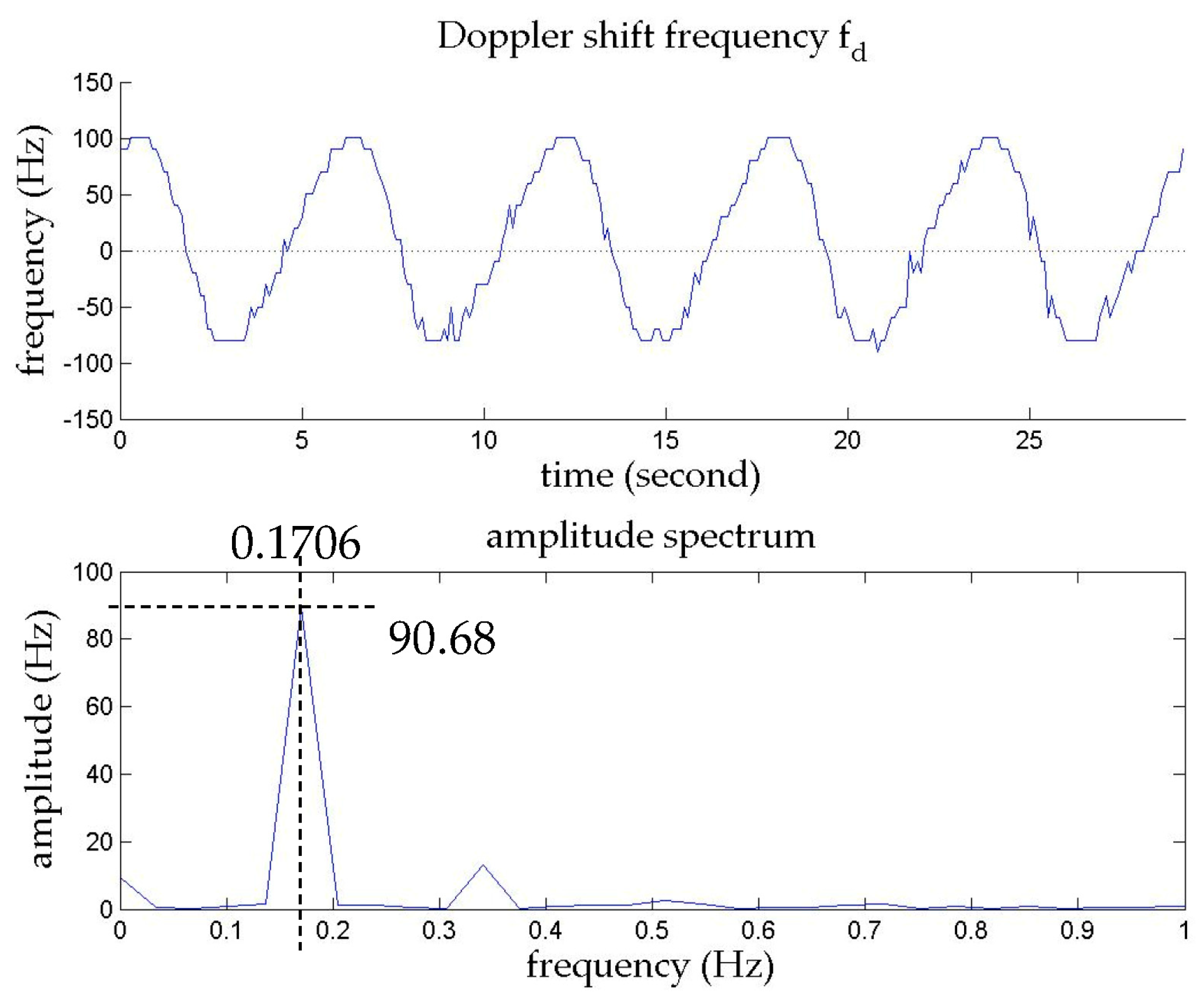
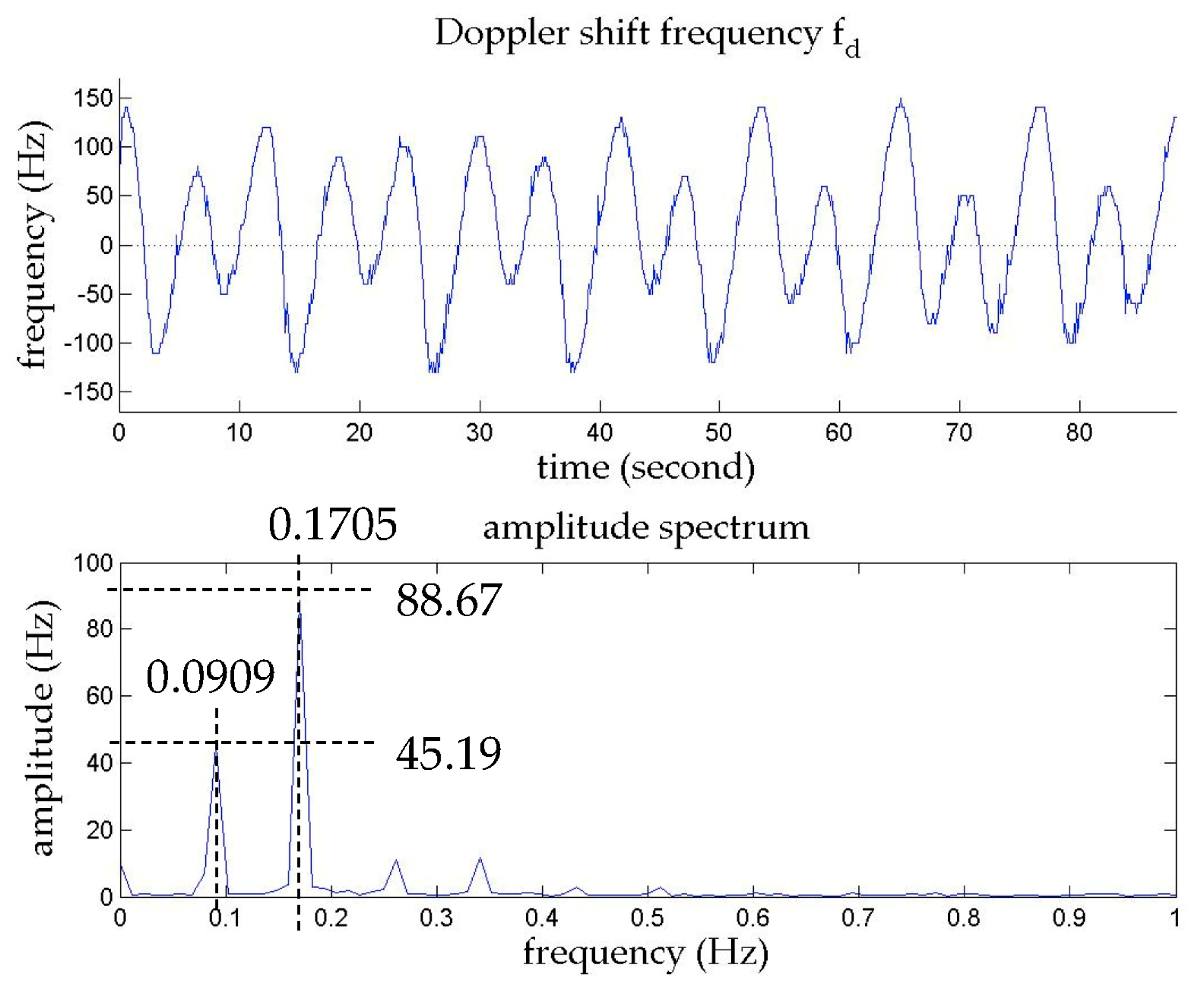
The extracted bright line, i.e., the time series of the Doppler shift frequency
, and its amplitude spectrum are plotted in
Figure 14. A significant peak can be seen in the amplitude spectrum and the corresponding amplitude and frequency are 90.68 Hz and 0.1706 Hz. Therefore,
is 90.68 Hz and
is 5.86 s. Substituting
and
into Equations (9) and (10), the measured wave period and wave height are 5.86 s and 1.05 m, respectively.
In addition to the significant peak at 0.1706 Hz, some other secondary peaks show up at the integer multiples of the frequency 0.1706 Hz because the velocities of the dominant facet are calculated according to Equations (5) and (6), which contain not only sinusoidal terms but also hyperbolic terms. According to the Taylor Series expansion of hyperbolic functions, the terms of cosh and sinh with variable z can be expressed as an infinite sum of terms which contain zn, n = 0, 1, 2, 3, …. Therefore the harmonics of the wave frequency exist in the velocities of the dominant facet as the result of the vertical coordinate z varying with same period of the generated wave.
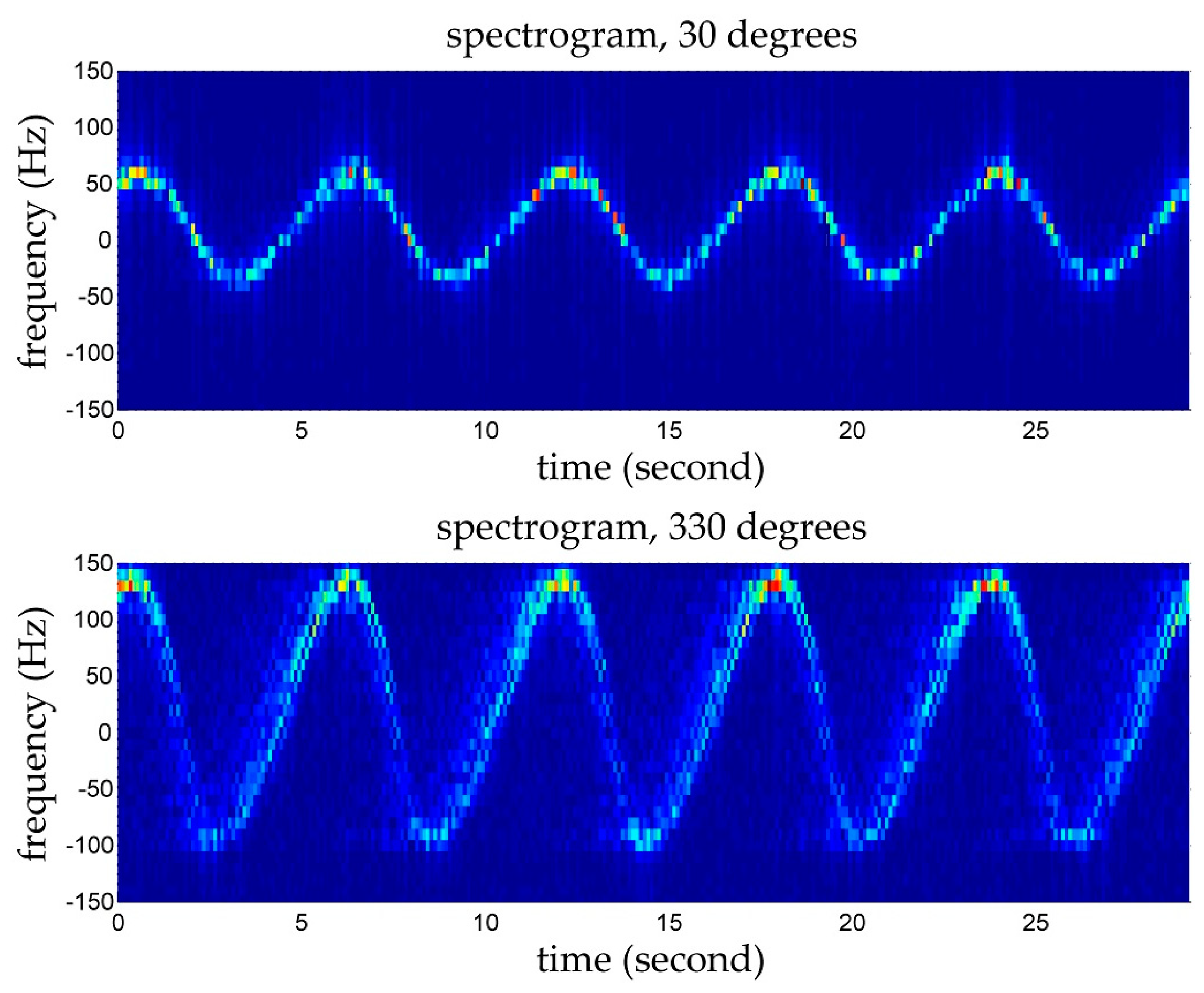
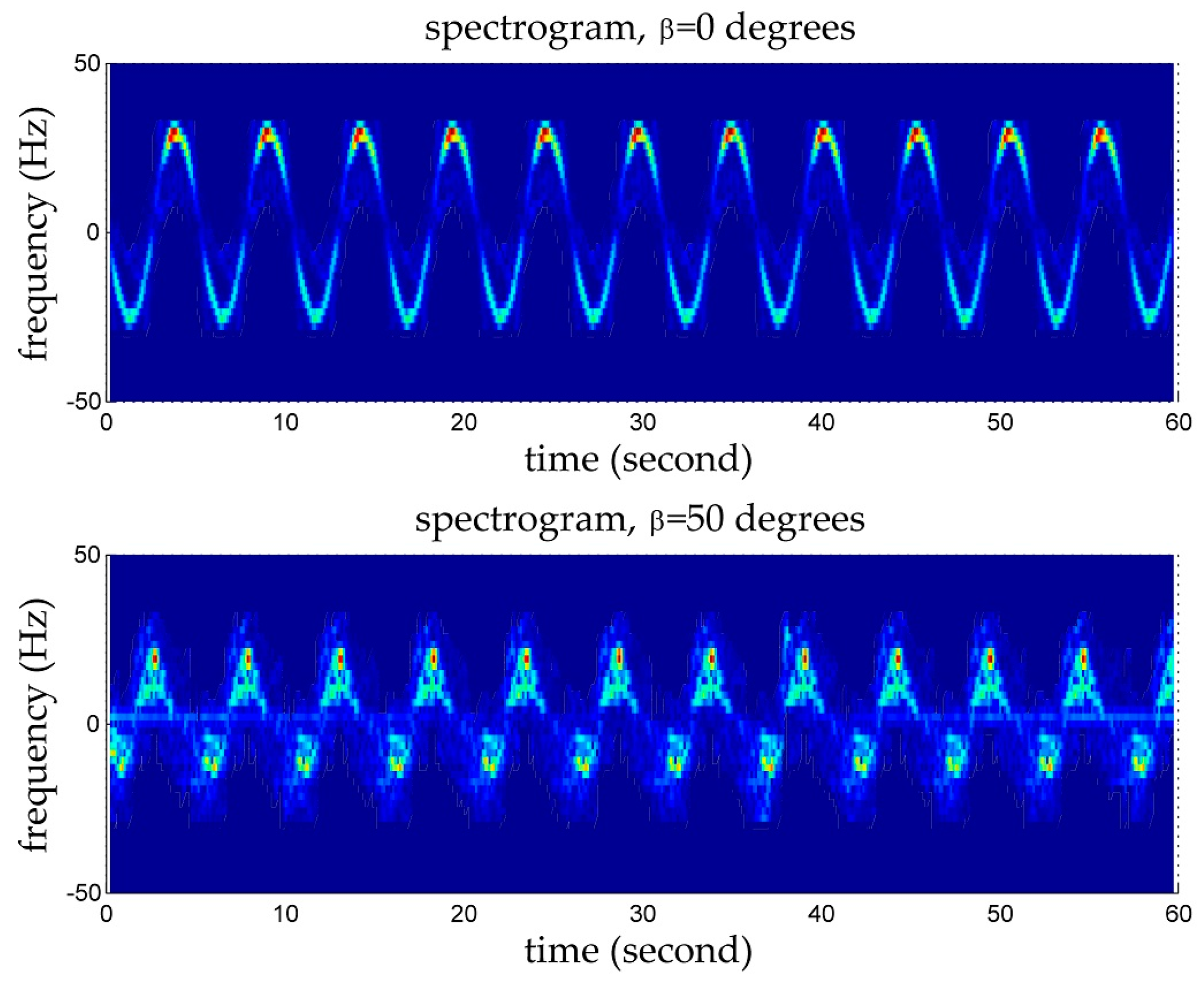
Two other simulations were executed for two radar directions, 30 degrees and 330 degrees. Two spectrograms of the
IF signals are shown in
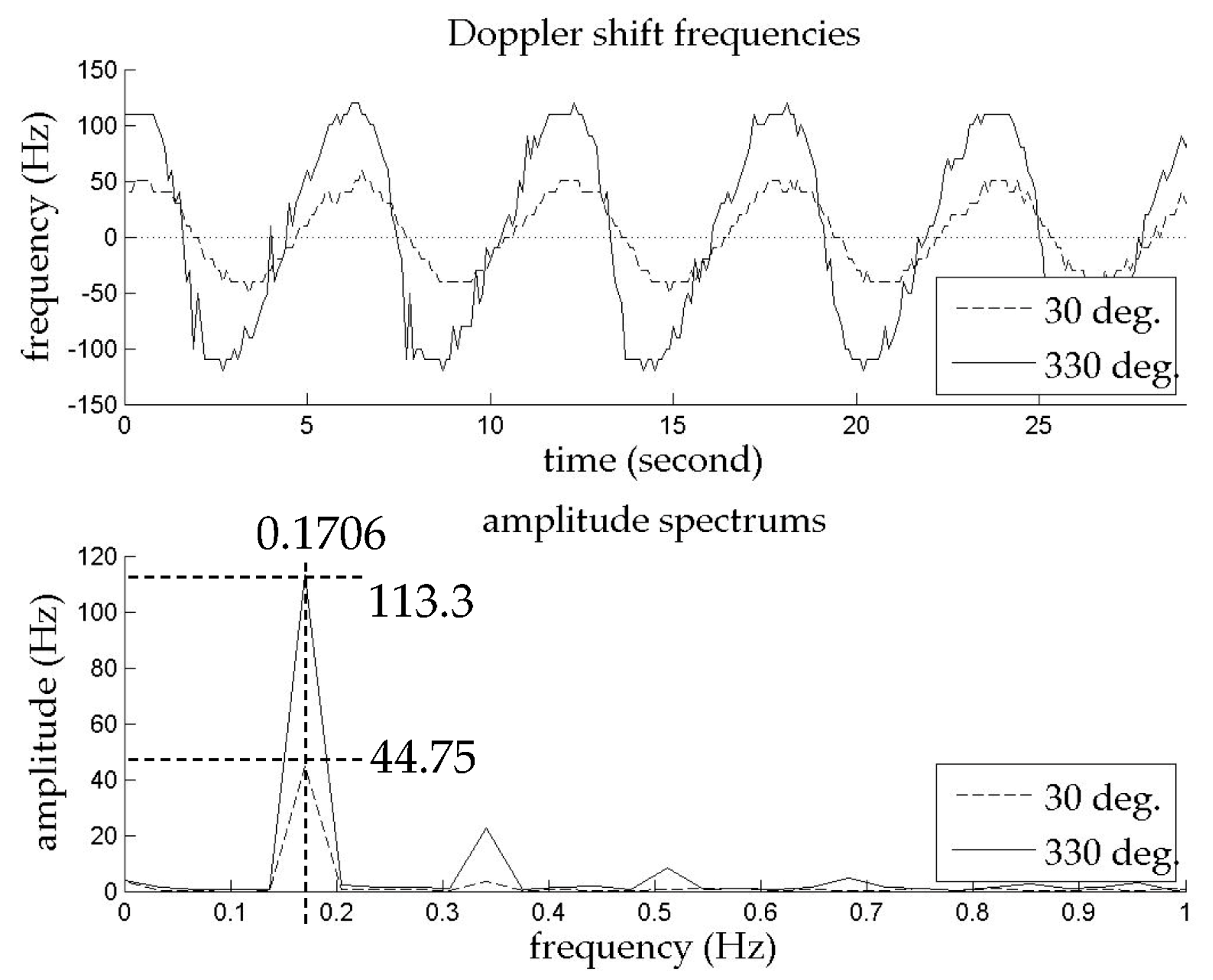
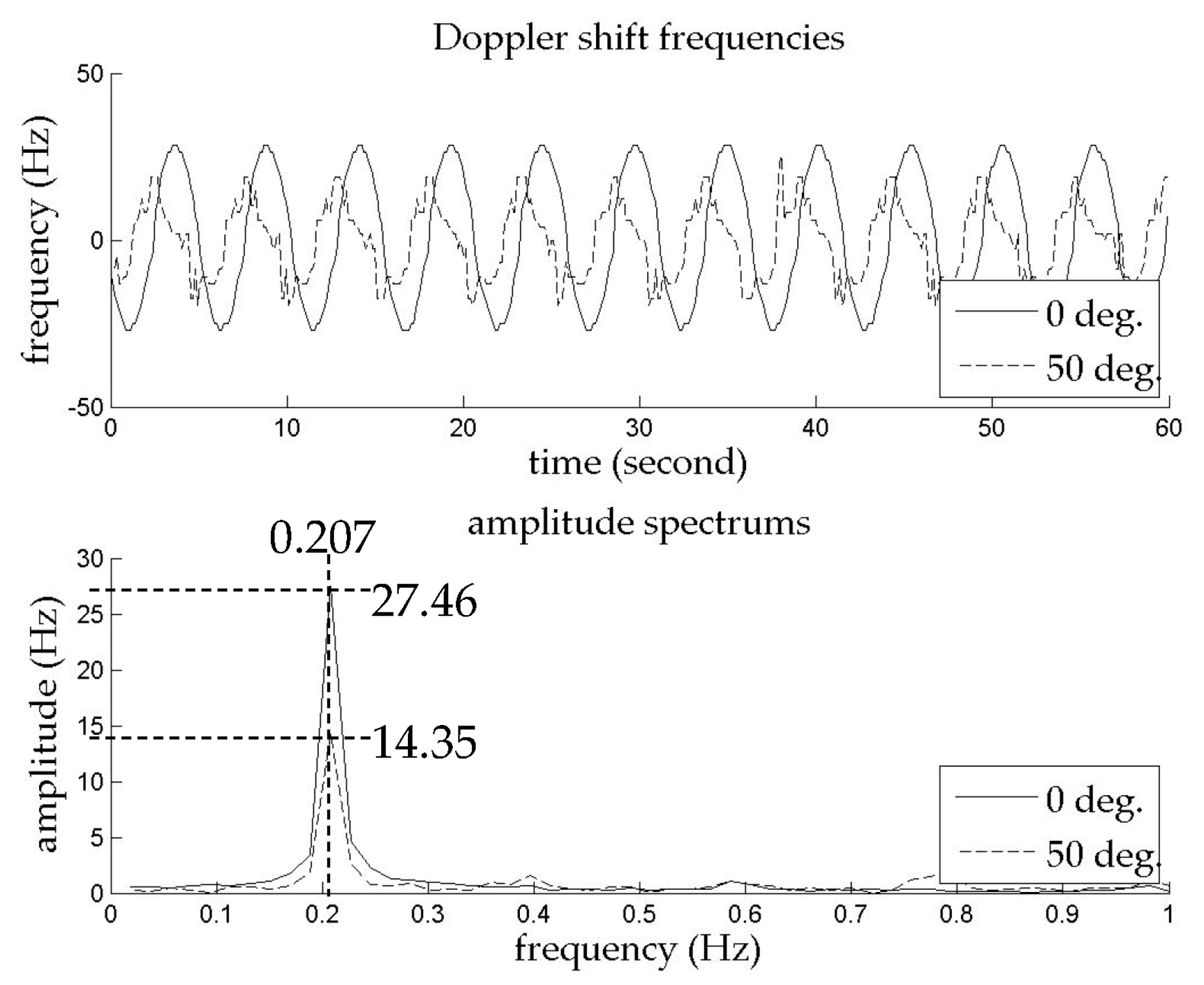
Figure 15. Two extracted Doppler shift frequencies and two amplitude spectra are shown in
Figure 16.
Similarly, two sets of results of wave period and height are obtained and shown in
Table 4 with the first results. The three measured wave periods are identical, 5.84 Hz, which are very close to the period of the simulated ocean wave. The error mainly comes from the frequency resolution of the amplitude spectrum.
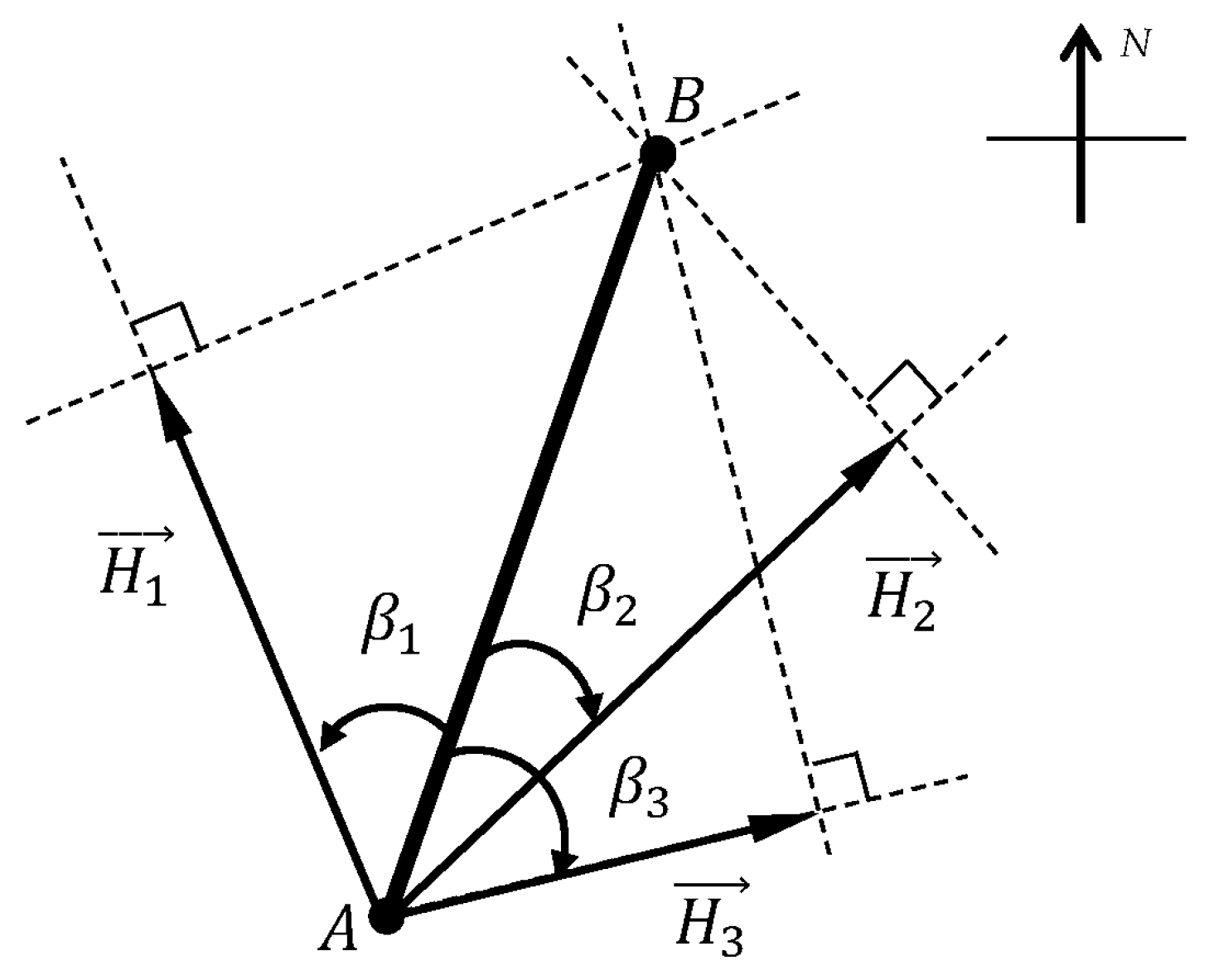
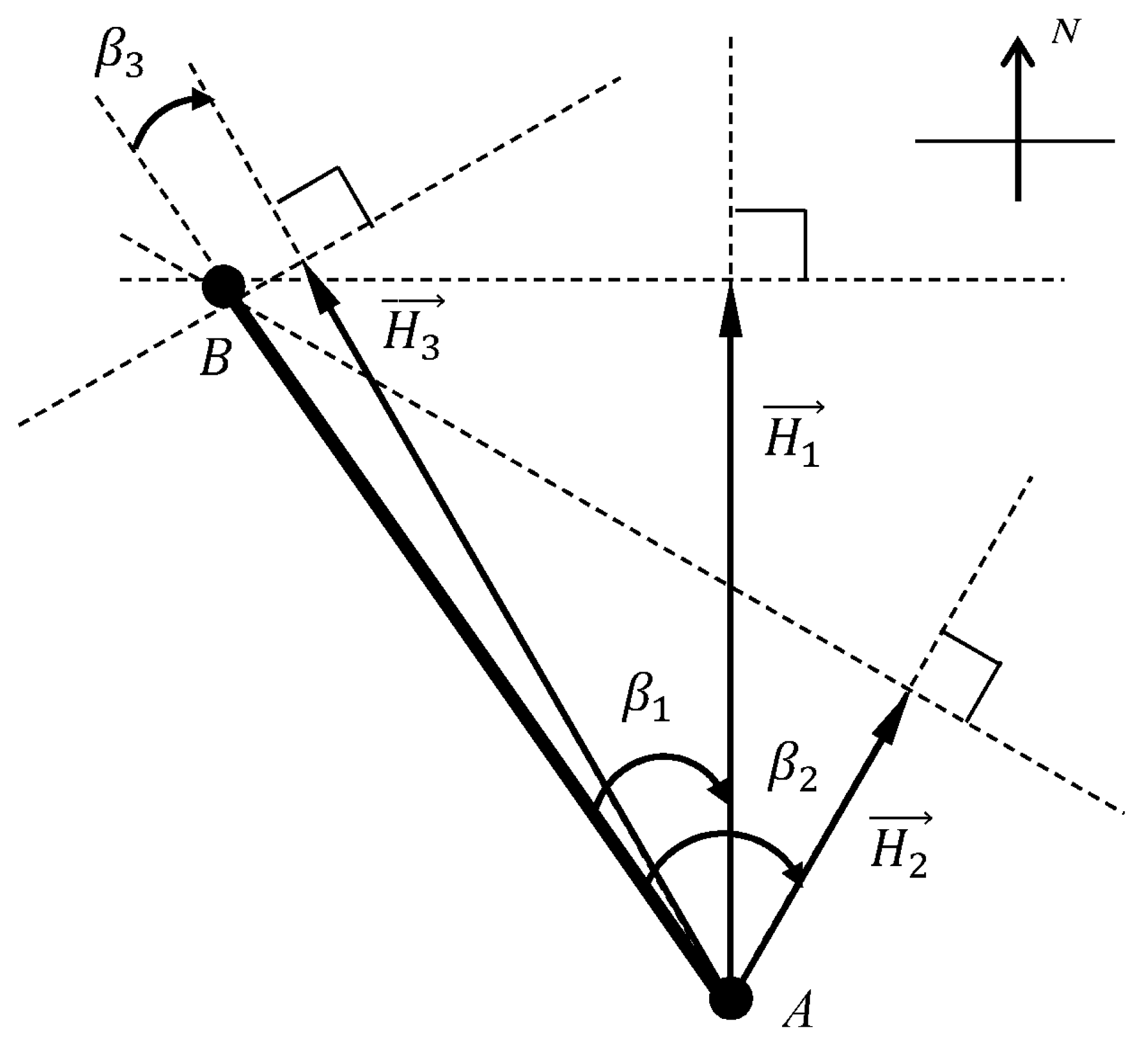
Three measured wave heights are less than 1.37 m because of the angles to the wave direction. Similarly, the true wave height can be retrieved with three measured wave heights and three radar directions, as shown in
Figure 17.
In this case, these perpendicular lines cannot cross because of the wave height measurement errors. Here, the centroid B of the intersecting points of the perpendiculars is used. The length of the line segment AB, 1.33 m, is the final result of wave height measurement and the wave direction is measured to be about 142.13 degrees. The resultant measurement approximates the wave height and direction in the simulation conditions but with errors of 3.7% and 1.5%, respectively. There are three main error sources: the frequency resolution in the spectrogram of IF signal; the noise components in IF signal; the constructive or destructive scattering originated from the facets adjacent to the dominant facet . The errors can be greatly decreased if the frequency resolution and the extraction method are improved.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}