Automating Parameter Learning for Classifying Terrestrial LiDAR Point Cloud Using 2D Land Cover Maps



Abstract
1. Introduction
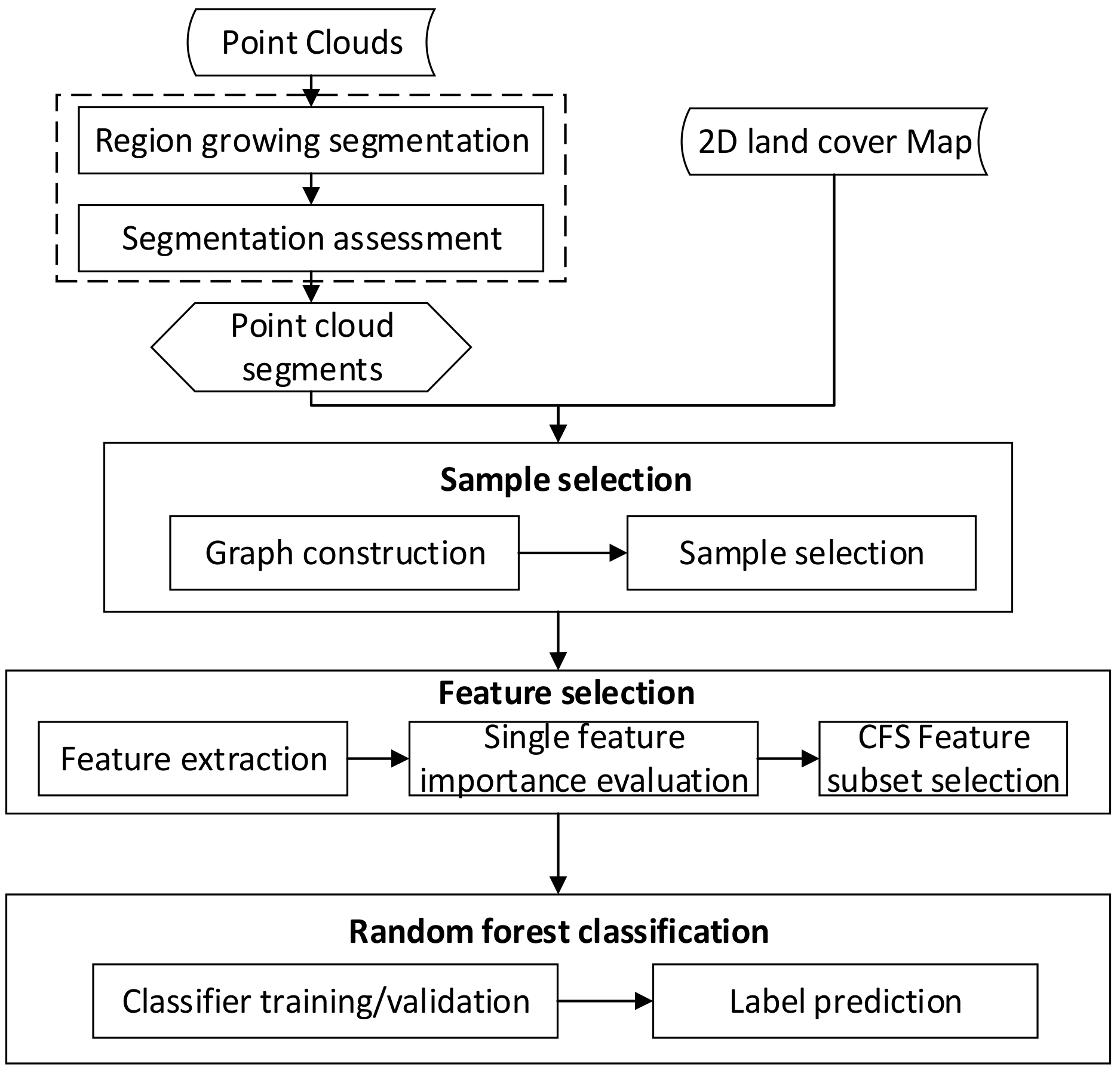
2. Parameter Learning Method
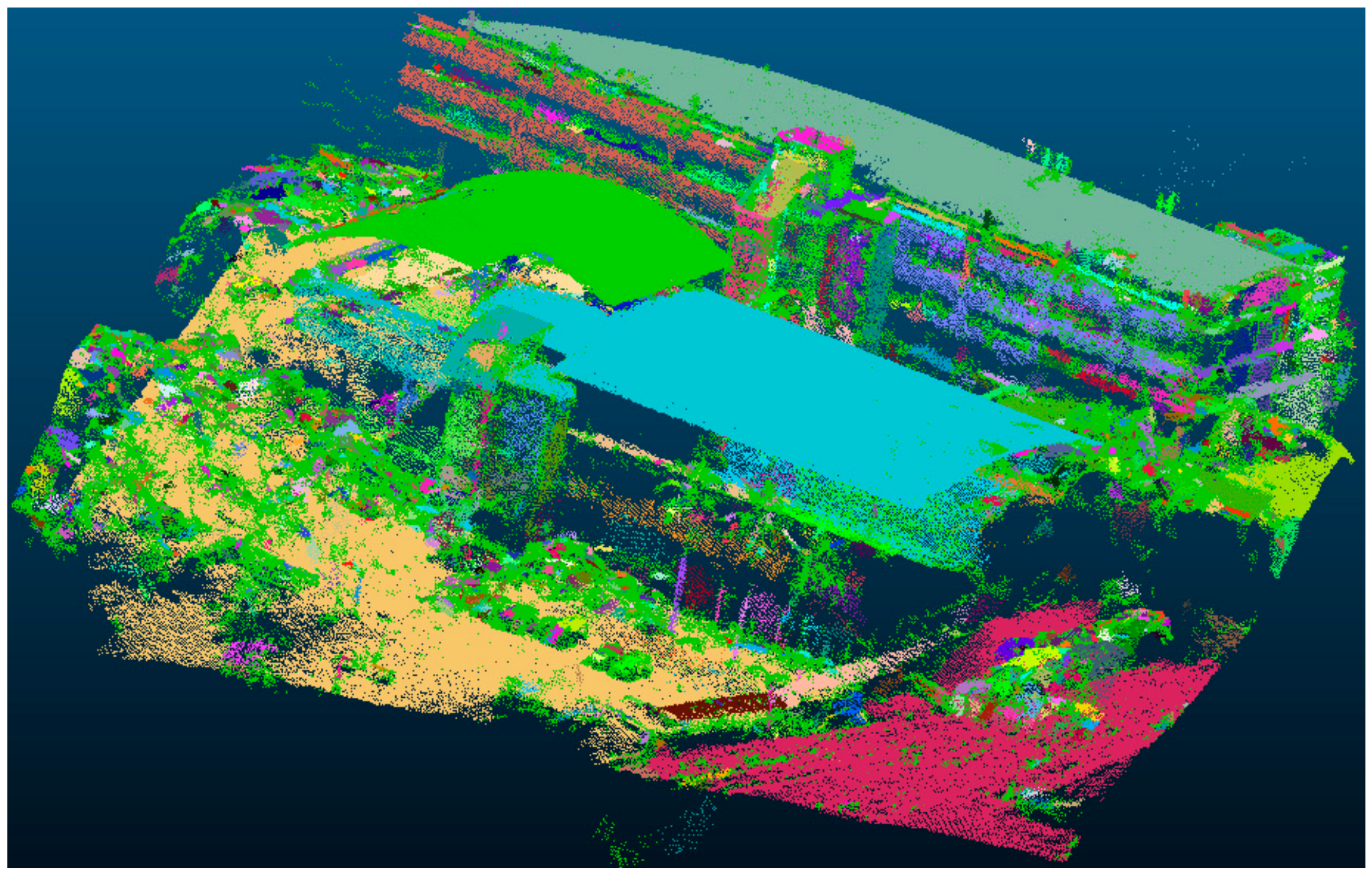
2.1. Segmentation of Point Clouds and Segmentation Assessment
2.1.1. Region Growing Segmentation
2.1.2. Quality Assessment
2.2. Sample Selection
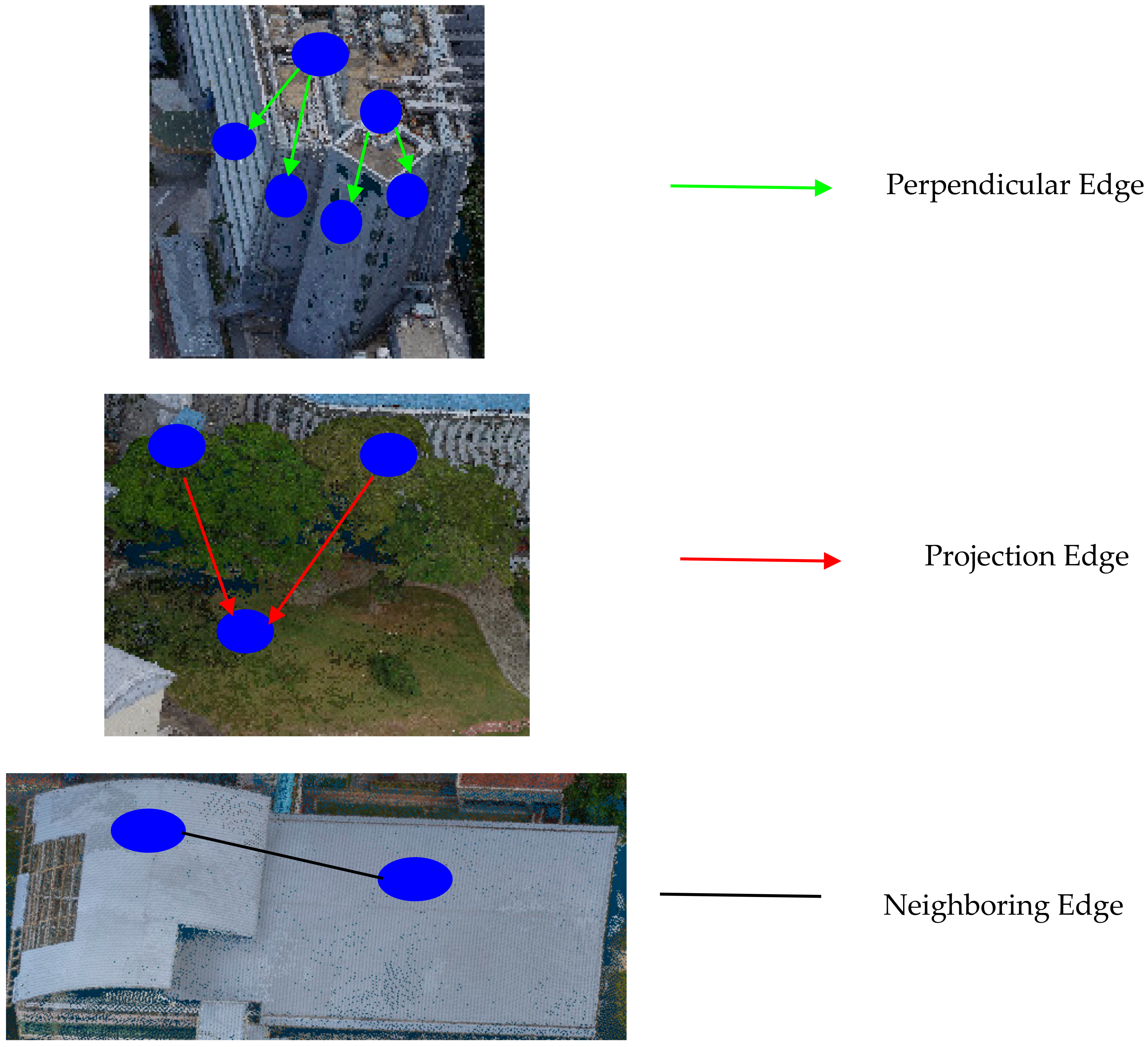
2.2.1. Graph Construction
- Perpendicular relationship. If two polygons meet the two requirements, (a) the normal vectors of two polygon surfaces are nearly perpendicular and (b) one of the normal vectors is nearly parallel to the vertical (i.e., the angle between the two is negligible). If two nodes, and , hold the perpendicular relationship, they are connected by a directed edge, . The node with the higher average height value is designated as the starting node, while the node with the lower average height value is designated as the ending node. In practice, a roof and the walls underneath it usually hold this relationship.
- Projection relationship. If two polygons do not hold the perpendicular relationship but meet the following requirement: the extent of overlap between the two polygons on the XY plane is larger than a specified threshold . Two nodes that satisfy such a requirement are connected by a directed edge, . Similar to the perpendicular relationship, the node with a higher average height value is designated as the starting node, while the node with the lower average height value is designated as the ending node. Each edge in this topological relation is further assigned a weight value, which is obtained by calculating the height difference between the high and low average height values. In practice, the tree tops and the grassland, or the tree tops and the ground usually hold this relationship.
- Neighboring relationship. If two polygons do not hold one of the two former relationships, but are neighbors on the XY plane. The nodes representing the two polygons are connected by an undirected edge.
2.2.2. Sample Selection with 2D Land Cover Map
- (1)
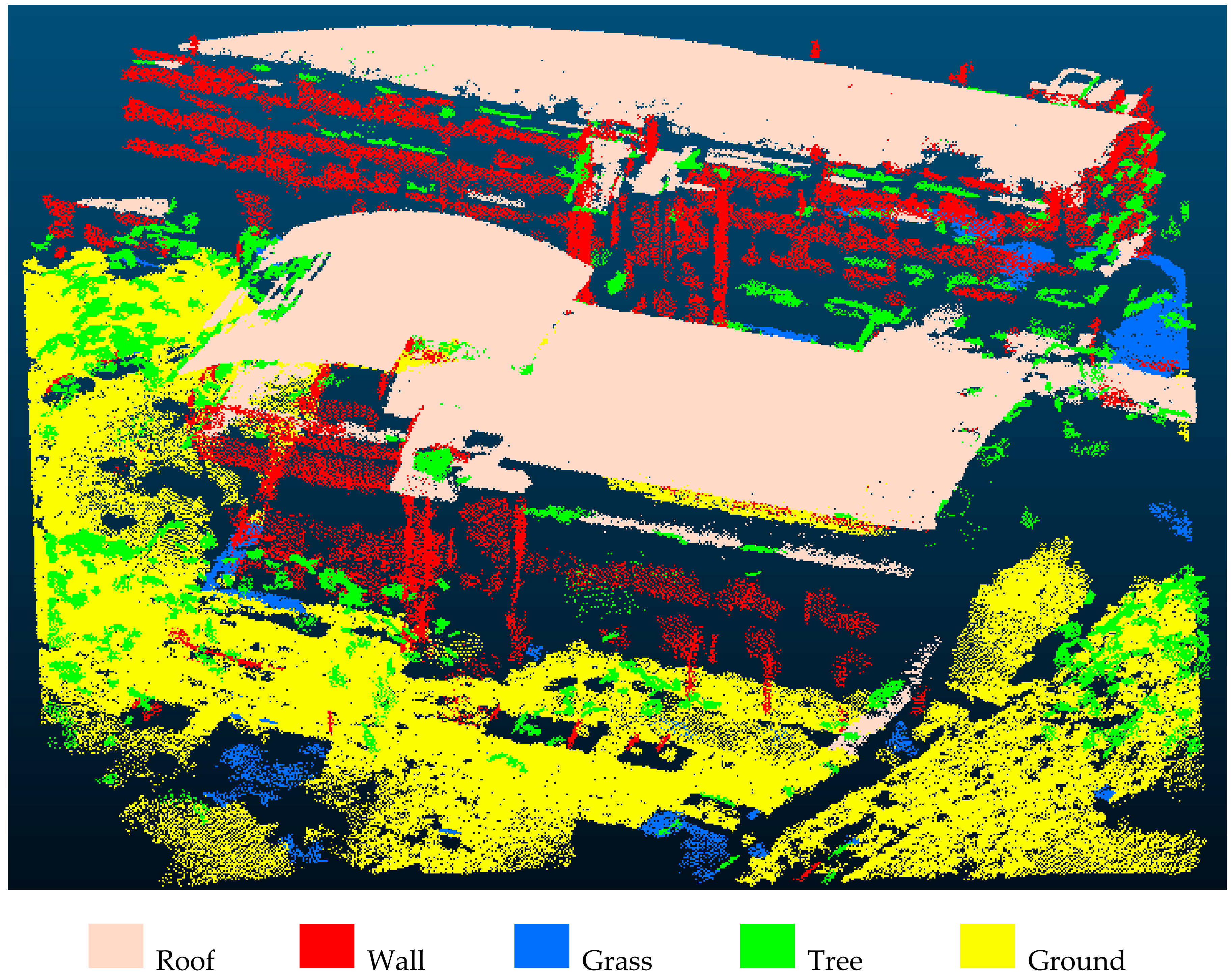
- Roof. A node is considered to be representing a roof segment according to the following criteria. Firstly, its HM-class must be building and the membership value is above a certain value. Secondly, the normal vector of the segment is nearly vertical. Thirdly, the area of the projection of the segment on the XY plane is larger than a specified threshold, . The threshold is selected as there is hardly a roof with an area smaller than .
- (2)
- Wall. Once all of the roof segments are identified, the remaining nodes in graph are searched for wall segments by first identifying all of the nodes that are connected to the roof nodes through the edges of the designated perpendicular relationships. To handle potential noises, the angles between the normal vector of the identified nodes, and the horizontal are examined. If the angles are negligible, the segments represented by the corresponding nodes are considered to belong to the wall.
- (3)
- Tree. Two criteria are used to identify the tree nodes. Firstly, if the HM-class of the node in the remaining list of nodes is tree, it is identified as a candidate node. Secondly, for each candidate node, identify all of the connected projection edges, which can be outgoing projection edges, with the candidate node being the starting node or the incoming projection edges with the candidate node being the ending node, and calculate two values—the sum of the weights of all of the incoming projection edges and the sum of the weights of all of the outgoing projection edges. If the former is larger than the latter, the candidate node is labeled tree. The intuition behind this rule to exclude the ground and grass segments, which might overlap with tree on the XY plane but have relatively lower height values.
- (4)
- Ground. Two criteria are used to identify ground nodes. Firstly, if the HM-class of a node is ground, the node is identified as a candidate node. Secondly, similar to the second step for identifying tree nodes, identify all of the outgoing edges and the incoming edges and obtain the sums of the corresponding edge weights. If the sum of the weights for the incoming edges is smaller than that of the outgoing edges, the candidate node is labeled ground. The intuition of the two criteria is to exclude the possible tree segments above the ground.
- (5)
- Grass. The criteria to identify grass nodes are exactly the same as the criteria to identify ground, except that the HM-class of the candidate nodes for grass must be grass. The intuition is to exclude the possible tree segments above the grassland.
2.3. Feature Extraction and Feature Selection
2.4. Classification of Point Cloud Segments
- (1)
- Select, randomly from the training set, a sample set by bagging or bootstrap [36];
- (2)
- Select, randomly, a feature subset from the optimal feature set. The number of selected features in the feature subset approximates , where is the number of features in the optimal feature set;
- (3)
- Find the largest information gain for node splitting. A feature and its splitting threshold is determined at each node;
- (4)
- Iterate the splitting process until all of the samples in the same node have the same label or the decision tree reaches a maximum depth.
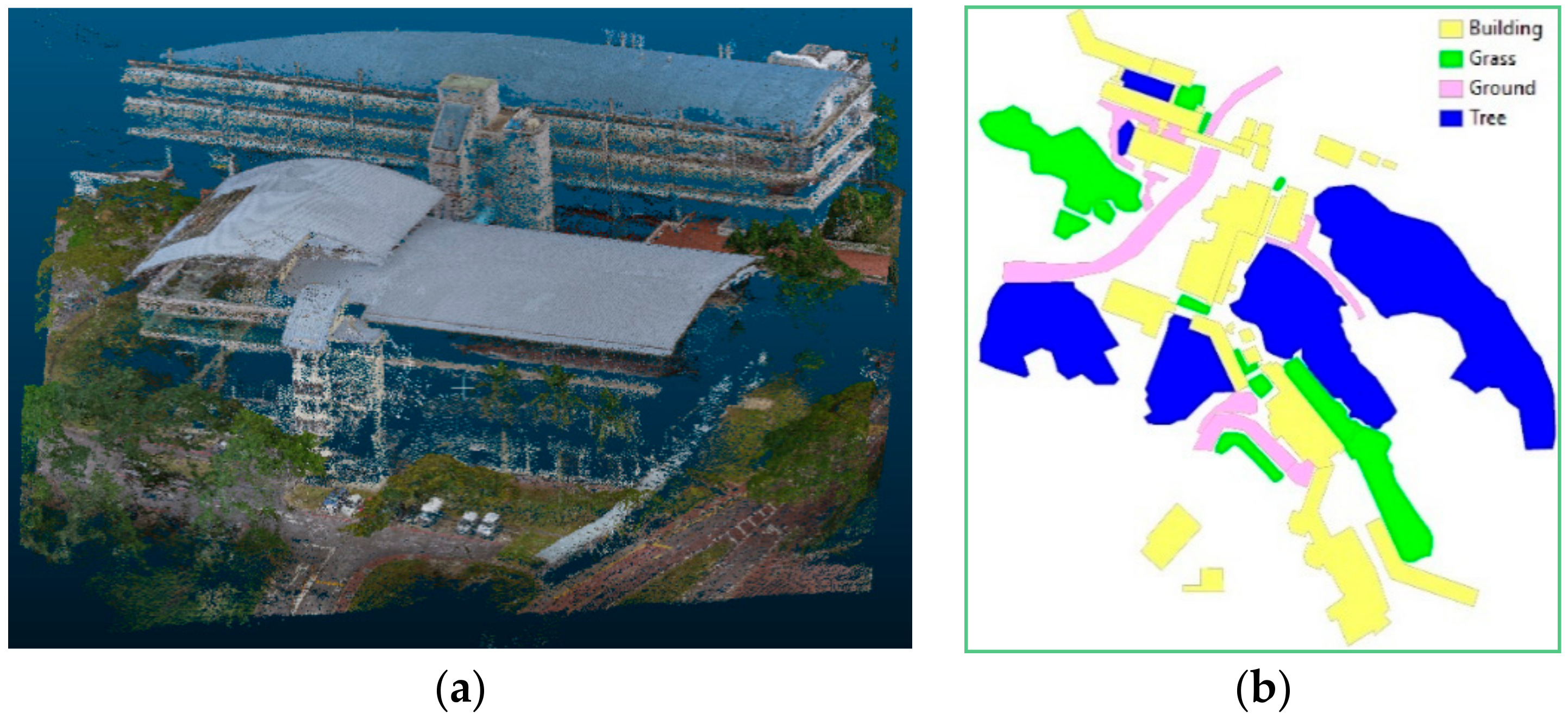
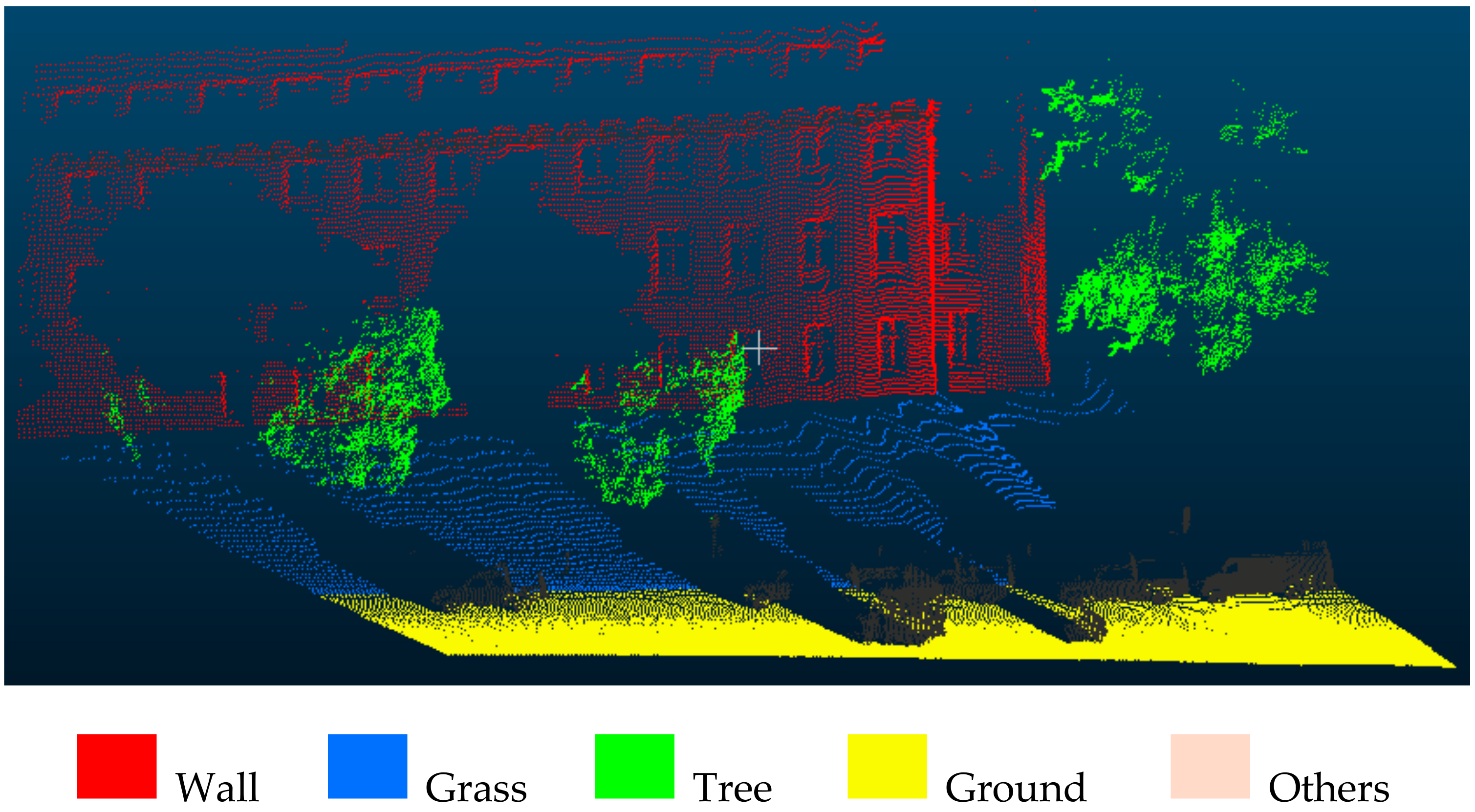
3. Study Area and Datasets
4. Experiments and Analysis
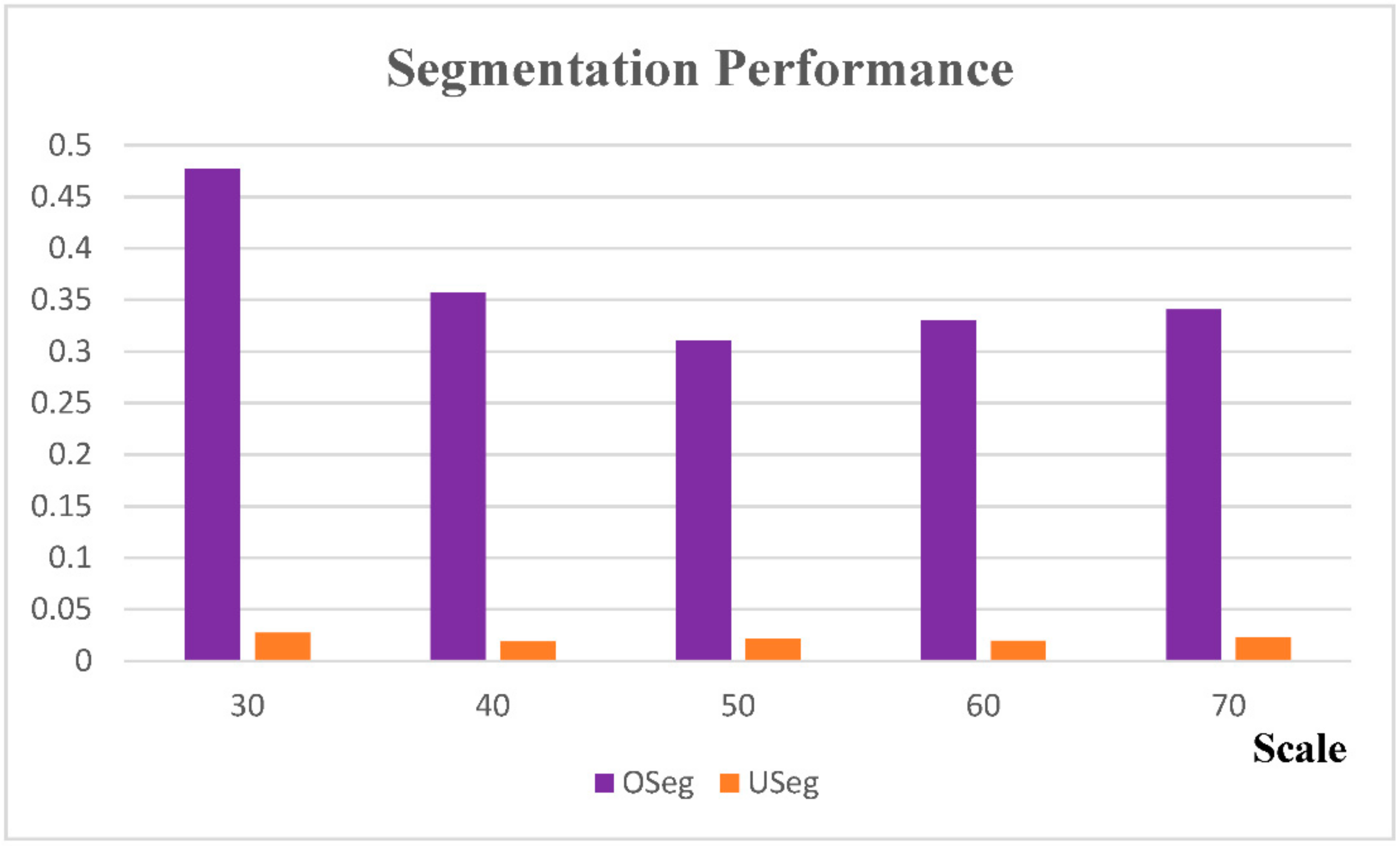
4.1. Segmentation Results of Multiple Scales
4.2. Results and Evaluations of Sample Selection
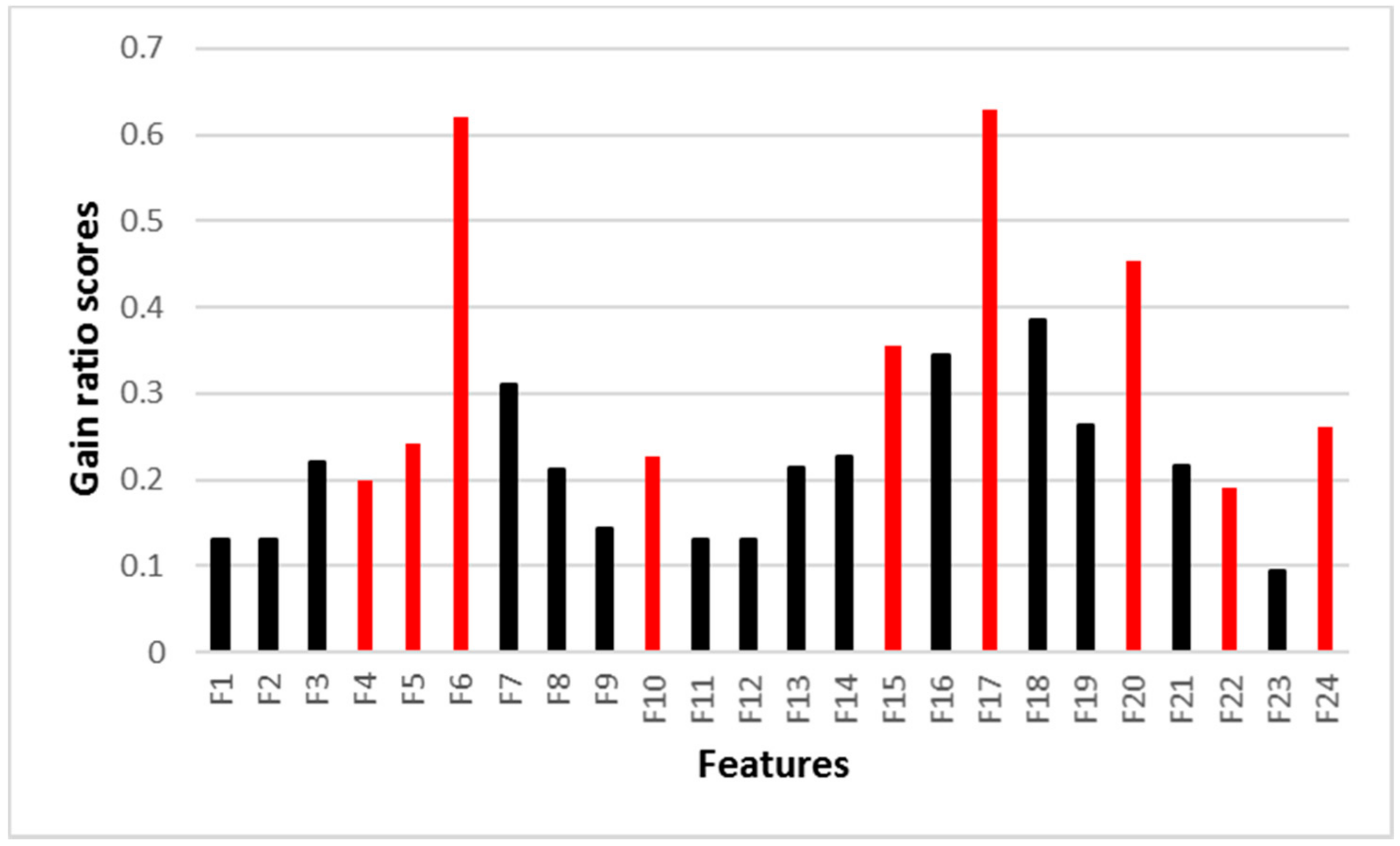
4.3. Results of Optimal Feature Set Selection
4.4. Classification Result of Dataset1
4.5. Classification Result of Dataset2
4.6. Classification Result of Dataset3
4.7. Comparison of Segment-Based and Point-Based Classification Results
4.8. Computational Performance
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alexander, C.; Tansey, K.; Kaduk, J.; Holland, D.; Tate, N. An approach to classification of airborne laser scanning point cloud data in an urban environment. Int. J. Remote Sens. 2011, 32, 9151–9169. [Google Scholar]
- Niemeyer, J.; Rottensteiner, F.; Soergel, U. Conditional random fields for lidar point cloud classification in complex urban areas. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 263–268. [Google Scholar] [CrossRef]
- Kwak, E.; Habib, A. Automatic representation and reconstruction of DBM from LiDAR data using recursive minimum bounding rectangle. ISPRS J. Photogramm. Remote Sens. 2014, 93, 171–191. [Google Scholar] [CrossRef]
- Dorninger, P.; Pfeifer, N. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef] [PubMed]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Applications in geomorphology. ISPRS J. Photogramm. Remote Sens. 2012, 68, 121–134. [Google Scholar] [CrossRef]
- Lin, C.; Chen, J.; Su, P.; Chen, C. Eigen-feature analysis of weighted covariance matrices for LiDAR point cloud classification. ISPRS J. Photogramm. Remote Sens. 2014, 94, 70–79. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, L.; Fang, T.; Tong, X.; Qu, H.; Xiao, Z.; Li, F.; Chen, D. A multiscale and hierarchical features extraction method for terrestrial laser scanning point cloud classification. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2409–2425. [Google Scholar] [CrossRef]
- Weinmann, M.; Jutzi, B.; Hinz, S.; Mallet, C. Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers. ISPRS J. Photogramm. Remote Sens. 2015, 105, 286–304. [Google Scholar] [CrossRef]
- Richter, C.; Behrens, M.; Dollner, J. Object class segmentation of massive 3D point clouds of urban areas using point cloud topology. Int. J. Remote Sens. 2013, 34, 8408–8424. [Google Scholar] [CrossRef]
- Vosselman, G.; Gorte, B.; Sithole, G.; Rabbani, T. Recognising structure in laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 46, 33–38. [Google Scholar]
- Aijazi, A.; Checchin, P.; Trassoudaine, L. Segmentation based classification of 3D urban point clouds: A super-voxel based approach with evaluation. Remote Sens. 2013, 5, 1624–1650. [Google Scholar] [CrossRef]
- Yang, B.; Dong, Z. A shape-based segmentation method for mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 81, 19–30. [Google Scholar] [CrossRef]
- Liu, K.; Boehm, J. A new framework for interactive segmentation of point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 357–361. [Google Scholar] [CrossRef]
- Awrangjeb, M. Using point cloud data to identify, trace, and regularize the outlines of buildings. Int. J. Remote Sens. 2016, 37, 551–579. [Google Scholar] [CrossRef]
- Zhu, Q.; Li, Y.; Hu, H.; Wu, B. Robust point cloud classification based on multi-level semantic relationships for urban scenes. ISPRS J. Photogramm. Remote Sens. 2017, 129, 86–102. [Google Scholar] [CrossRef]
- Lodha, S.; Fitzpatrick, D.; Helmbold, D. Aerial lidar data classification using Adaboost. In Proceedings of the IEEE International Conference on 3-D Digital Imaging and Modelling, Montreal, QC, Canada, 21–23 August 2007; pp. 435–442. [Google Scholar]
- Chehata, N.; Guo, L.; Mallet, C. Airborne lidar feature selection for urban classification using random forests. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, 207–212. [Google Scholar]
- Mahmoudi, M.; Sapiro, G. Three-dimensional point cloud recognition via distributions of geometric distances. Graph. Model. 2009, 71, 22–31. [Google Scholar] [CrossRef]
- Qi, C.; Su, H.; Mo, K.; Guibas, L. PointNet: Deep learning on point sets for 3d classification and segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; IEEE: Piscataway, NJ, USA, 2017; Volume 1, pp. 652–660. [Google Scholar]
- Qi, C.; Yi, L.; Su, H.; Guibas, L. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In Advances in Neural Information Processing Systems; MIT: Cambridge, MA, USA, 2017; pp. 2099–5108. [Google Scholar]
- Zhao, R.; Pang, M.; Wang, J. Classifying airborne LiDAR point clouds via deep features learned by a multi-scale convolutional neural network. Int. J. Geogr. Inf. Sci. 2018, 32, 960–979. [Google Scholar] [CrossRef]
- Khoshelham, K.; Oude Elberink, S. Role of dimensionality reduction in segment-based classification of damaged building roofs in airborne laser scanning data. In Proceedings of the International Conference on Geographic Object Based Image Analysis, Rio de Janeiro, Brazil, 7–9 May 2012; pp. 7–9. [Google Scholar]
- Duda, R.O.; Hart, P.E.; Stock, D.G. Pattern Classification, 2nd ed.; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Bouziani, M.; Goita, K.; He, D. Rule-based classification of a very high resolution image in an urban environment using multispectral segmentation guided by cartographic data. IEEE Trans. Geosci. Remote Sens. 2010, 8, 3198–3211. [Google Scholar] [CrossRef]
- Ma, L.; Cheng, L.; Li, M.; Ma, X. Training set size, scale, and features in Geographic object-based image analysis of very high resolution unmanned aerial vehicle imagery. ISPRS J. Photogramm. Remote Sens. 2015, 102, 14–27. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Automatic structure detection in a point cloud of an urban landscape. In Proceedings of the 2nd GRSS/ISPRS Joint Workshop on Remote Sensing and Data Fusion over Urban Areas: URBAN 2003, Berlin, Germany, 22–23 May 2003; pp. 67–71. [Google Scholar]
- Habib, A.; Lin, Y. Multi-class simultaneous adaptive segmentation and quality control of point cloud data. Remote Sens. 2016, 8, 104–126. [Google Scholar]
- Rabbani, T.; Van Den Heuvel, F.A.; Vosselman, G. Segmentation of point clouds using smoothness constraint. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 248–253. [Google Scholar]
- Hackel, T.; Wegner, J.; Schindler, K. Fast semantic segmentation of 3D point clouds with strongly varying density. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 177–184. [Google Scholar] [CrossRef]
- Lari, Z.; Habib, A. New approaches for estimating the local point density and its impact on Lidar data segmentation. Photogramm. Eng. Remote Sens. 2013, 79, 195–207. [Google Scholar] [CrossRef]
- Sampath, A.; Shan, J. Building boundary tracing and regularization from airborne LiDAR point clouds. Photogramm. Eng. Remote Sens. 2007, 73, 805–812. [Google Scholar] [CrossRef]
- Quinlan, J.R. Improved use of continuous attributes in C4. 5. J. Artif. Intell. Res. 1996, 4, 77–90. [Google Scholar] [CrossRef]
- Hall, M.A.; Holmes, G. Benchmarking attribute selection techniques for discrete class data mining. IEEE Trans. Geosci. Remote Sens. 2003, 15, 1437–1447. [Google Scholar] [CrossRef]
- Li, C.; Dong, X.; Zhang, Q. Multi-scale object-oriented building extraction method of Tai’an city from high resolution image. In Proceedings of the IEEE 3rd International Workshop on Earth Observation and Remote Sensing Applications, Changsha, China, 11–14 June 2014; pp. 91–95. [Google Scholar]
- Breiman, L. Random forests. In Machine Learning; Schapire, R.E., Ed.; Springer: Berlin, Germany, 2001; pp. 5–32. [Google Scholar]
- Efron, B. Bootstrap method: Another look at the jackknife. Ann. Stat. 1979, 7, 1–26. [Google Scholar]
- Munoz, D.; Bagnell, J.; Vandapel, N.; Hebert, M. Contextual classification with functional max-margon Markov networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 975–982. [Google Scholar]
- Guo, Z.; Du, S.; Li, M.; Zhao, W. Exploring GIS knowledge to improve building extraction and change detection from VHR imagery in urban areas. Int. J. Image Data Fusion 2015, 7, 42–62. [Google Scholar] [CrossRef]
- Najafi, M.; Namin, S.; Salzmann, M.; Petersson, L. Non-associative higher-order Markov networks for point cloud classification. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Cham, Switzerland, 2014; pp. 500–515. [Google Scholar]
- Blaschke, T.; Lang, S.; Lorup, E.; Strobl, J.; Zeil, P. Object-oriented image processing in an integrated GIS/remote sensing environment and perspectives for environmental applications. In Environmental Information for Planning, Politics and the Public; Cremers, A., Greve, K., Eds.; Metropolis Verlag: Marburg, Germany, 2000; Volume 2, pp. 555–570. [Google Scholar]
- Janecek, A.; Gansterer, W. A comparison of classification accuracy achieved with wrappers, Filters and PCA. In Proceedings of the Workshop on New Challenges for Feature Selection in Data Mining and Knowledge Discovery, Antwerp, Belgium, 15 September 2008. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Eigen-Based Features | Eigenvalue_1 | ||
| Eigenvalue_2 | |||
| Eigenvalue_3 | |||
| Normal_x | |||
| Normal_y | |||
| Normal_z | |||
| Sum | ++ | ||
| Omnivariance | |||
| Eigenentropy | |||
| Anisotropy | ()/ | ||
| Planarity | ()/ | ||
| Linearity | ()/ | ||
| Surface variation | |||
| Sphericity | |||
| Spectral Features | Mean red | M_R | |
| Mean green | M_G | ||
| Mean blue | M_B | ||
| Red deviation | Std_R | ||
| Green deviation | Std_G | ||
| Blue deviation | Std_B | ||
| Geometrical Features | Number of points | #N | |
| Area | S | ||
| Local point density | LPD | ||
| Average height | H_z |
| Class | Training Set (%) | Test Set (%) | ||||
|---|---|---|---|---|---|---|
| Precision | Recall | F-Score | Precision | Recall | F-Score | |
| Roof | 100 | 100 | 100 | 89.93 | 83.94 | 86.83 |
| Wall | 100 | 100 | 100 | 97.84 | 96.16 | 96.99 |
| Grass | 100 | 100 | 100 | 62.70 | 100.0 | 77.07 |
| Tree | 100 | 100 | 100 | 100.0 | 84.83 | 91.79 |
| Ground | 100 | 100 | 100 | 98.91 | 100 | 99.45 |
| Overall accuracy | 100 | 94.07 | ||||
| Class | Precision (%) | Recall (%) | F-Score (%) |
|---|---|---|---|
| Roof | 89.05 | 89.84 | 89.44 |
| Wall | 97.99 | 89.66 | 93.64 |
| Grass | 73.67 | 85.31 | 79.06 |
| Tree | 88.15 | 84.32 | 86.19 |
| Ground | 94.82 | 92.61 | 93.70 |
| Overall accuracy = 91.13% | |||
| Class | Accuracies of Different Methods (Precision-Recall-F-Score) | |||
|---|---|---|---|---|
| Our Method with Optimal Feature Set | Our Method with Full Feature Set | NAHO MRF | Weinmann et al. | |
| Wall | 94.74-85.02-89.62 | 94.13-84.27-88.93 | 91.0-94.0-92.0 | 92.73-65.80-76.98 |
| Grass | 87.12-81.67-84.31 | 76.24-78.18-77.20 | – | – |
| Tree | 82.15-92.09-86.89 | 79.57-88.54-83.82 | 95.0-94.0-94.0 | 89.82-93.35-91.55 |
| Ground | 100.0-100.0-100.0 | 99.96-99.32-99.64 | 99.0-99.0-99.0 | 98.98-97.89-98.43 |
| Pole | – | – | 70.0-56.0-62.0 | 45.75-70.52-55.50 |
| Wire | – | – | 66.0-89.0-76.0 | 10.19-82.31-18.13 |
| Vehicle | – | – | 75.0-87.0-81.0 | – |
| Overall Accuracy | 97.08 | 95.89 | – | 92.27 |
| Class | Training Set (%) | Test Set (%) | ||||
|---|---|---|---|---|---|---|
| Precision | Recall | F-Score | Precision | Recall | F-Score | |
| Roof | 99.71 | 99.84 | 99.77 | 88.67 | 84.72 | 86.65 |
| Wall | 99.63 | 99.62 | 99.63 | 92.13 | 94.59 | 93.34 |
| Grass | 98.78 | 97.85 | 98.31 | 76.9 | 71.2 | 73.94 |
| Tree | 96.76 | 93.02 | 94.85 | 80.3 | 84.91 | 82.54 |
| Ground | 98.14 | 99.46 | 98.80 | 92.18 | 94.67 | 93.41 |
| Overall accuracy | 98.76 | 89.41 | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, C.-C.; Guo, Z. Automating Parameter Learning for Classifying Terrestrial LiDAR Point Cloud Using 2D Land Cover Maps. Remote Sens. 2018, 10, 1192. https://doi.org/10.3390/rs10081192
Feng C-C, Guo Z. Automating Parameter Learning for Classifying Terrestrial LiDAR Point Cloud Using 2D Land Cover Maps. Remote Sensing. 2018; 10(8):1192. https://doi.org/10.3390/rs10081192
Chicago/Turabian StyleFeng, Chen-Chieh, and Zhou Guo. 2018. "Automating Parameter Learning for Classifying Terrestrial LiDAR Point Cloud Using 2D Land Cover Maps" Remote Sensing 10, no. 8: 1192. https://doi.org/10.3390/rs10081192
APA StyleFeng, C.-C., & Guo, Z. (2018). Automating Parameter Learning for Classifying Terrestrial LiDAR Point Cloud Using 2D Land Cover Maps. Remote Sensing, 10(8), 1192. https://doi.org/10.3390/rs10081192