Initial Assessment of Precise Point Positioning with LEO Enhanced Global Navigation Satellite Systems (LeGNSS)


 ,
, 
Abstract
1. Introduction
2. The LeGNSS Constellation
3. Simulation Configuration
3.1. The Simulation Software
3.2. The Adaption of PANDA Software
3.3. Setup
4. Assessment and Analysis of LeGNSS Precise Positioning
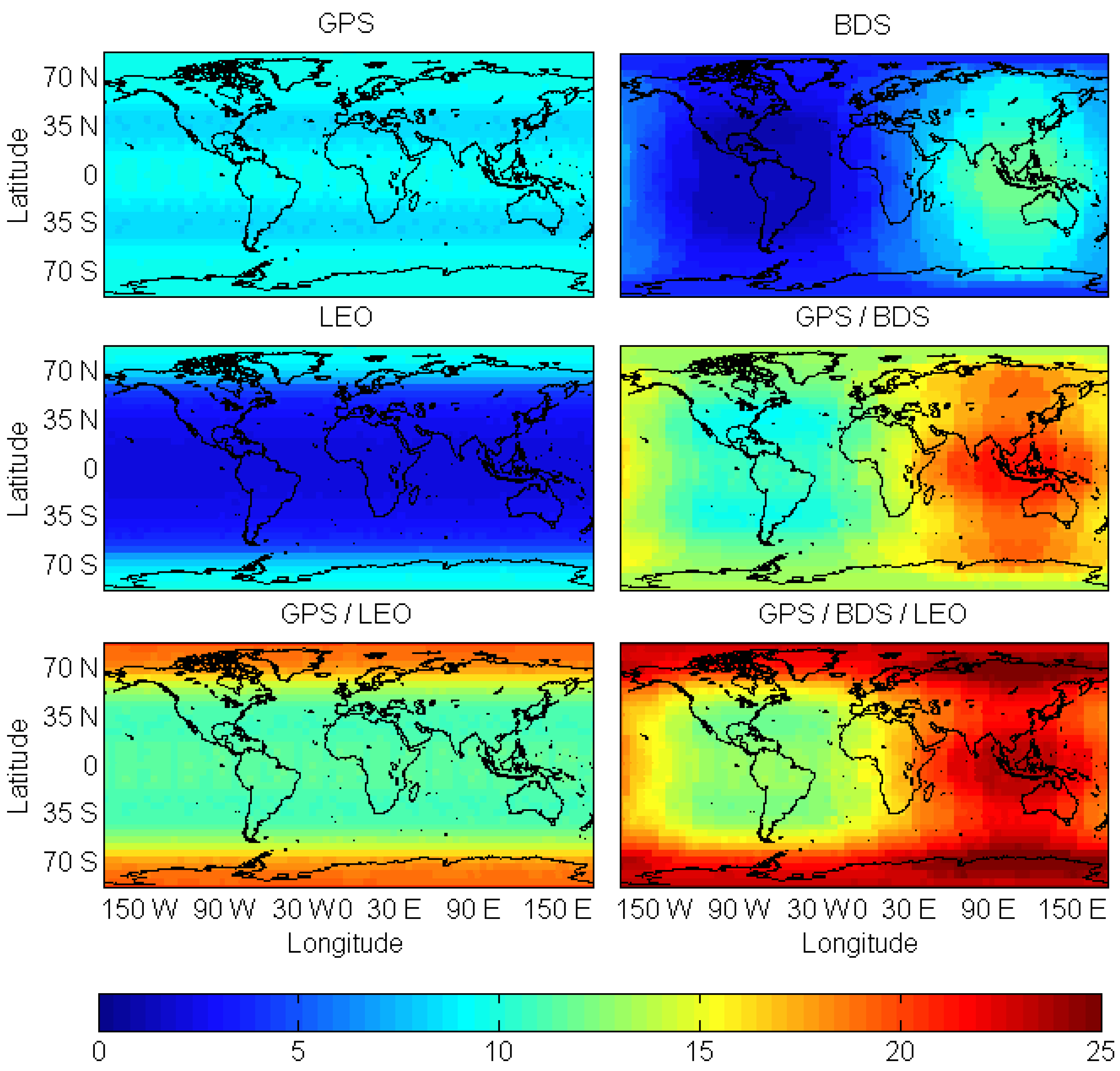
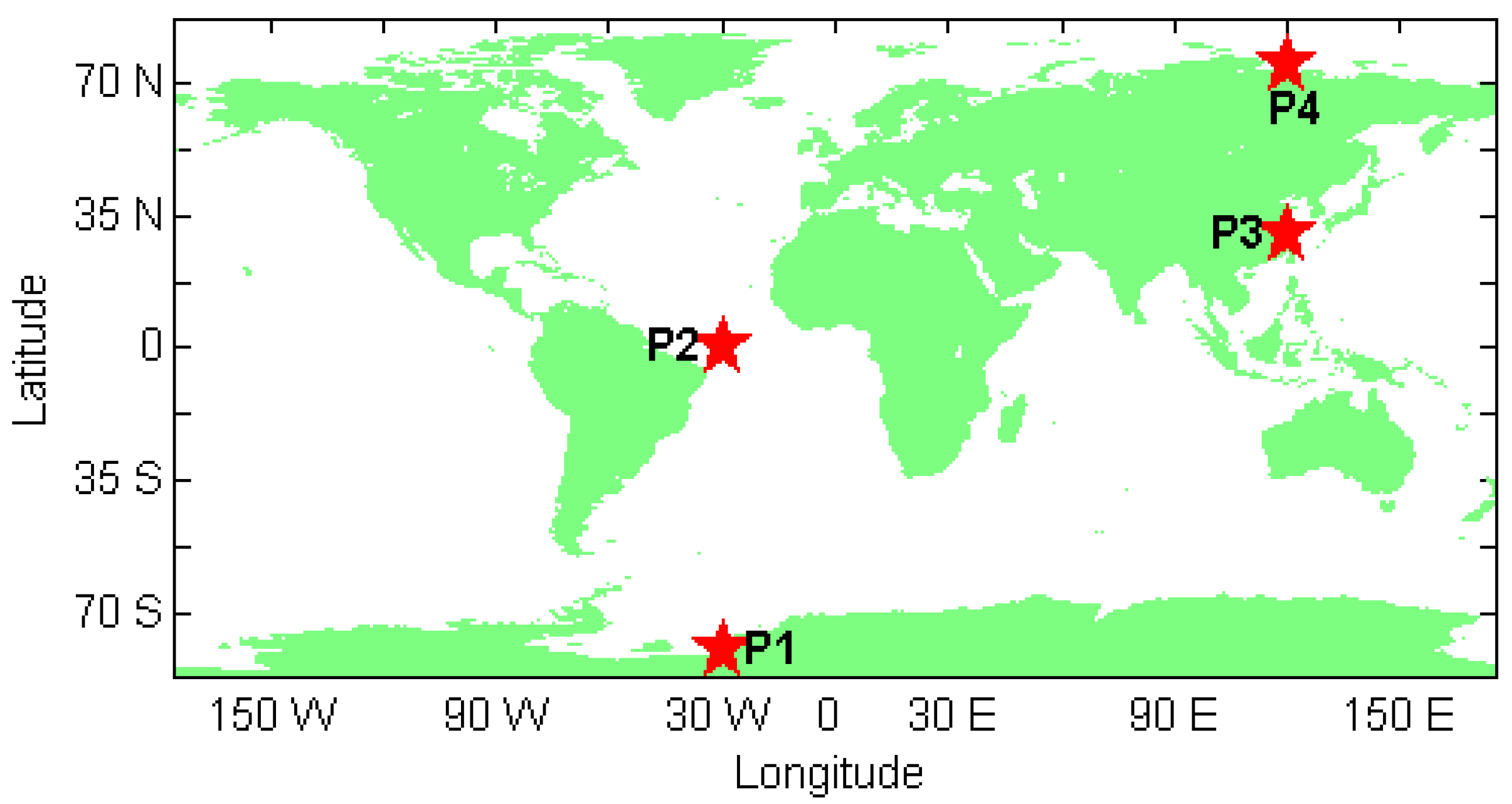
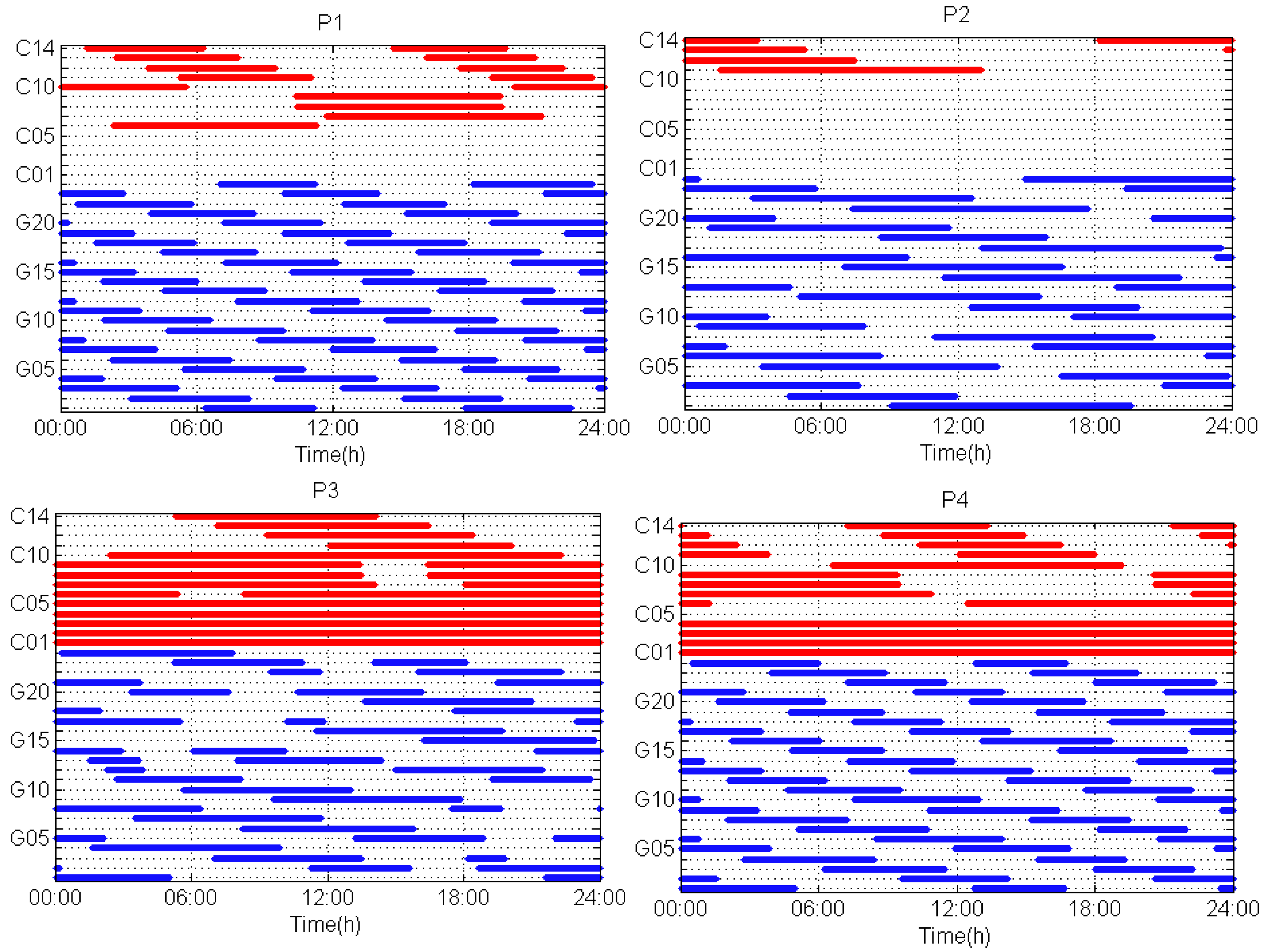
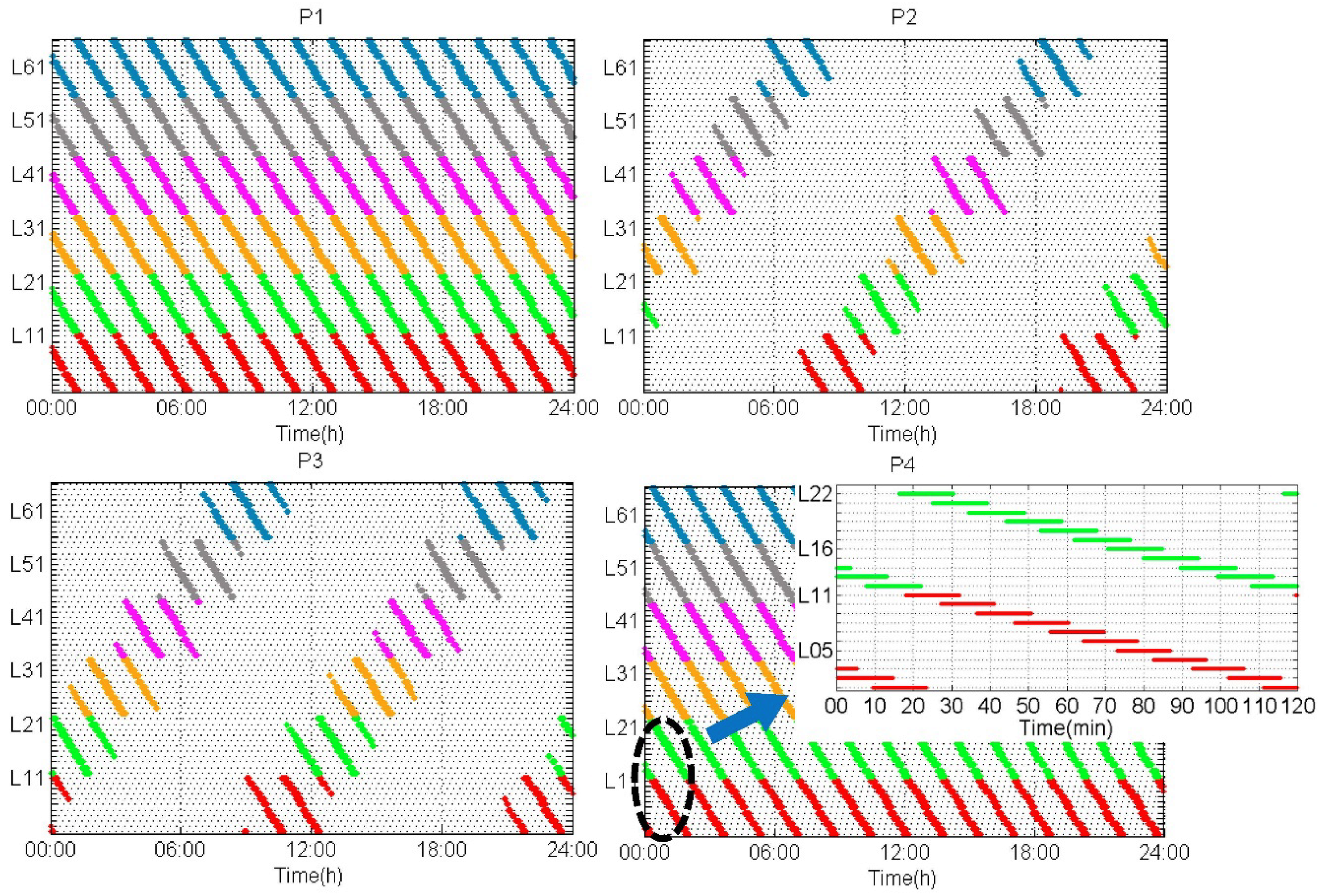
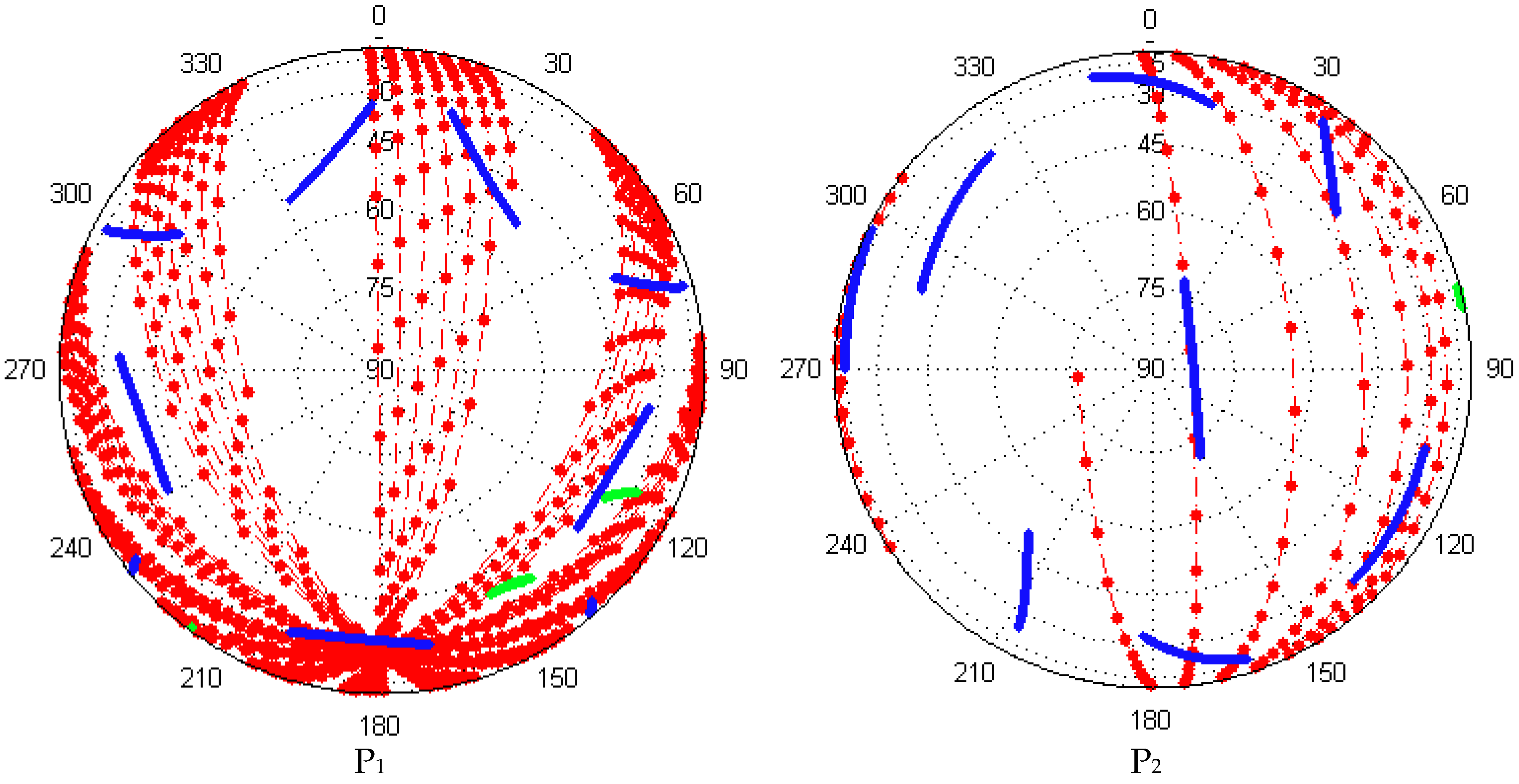
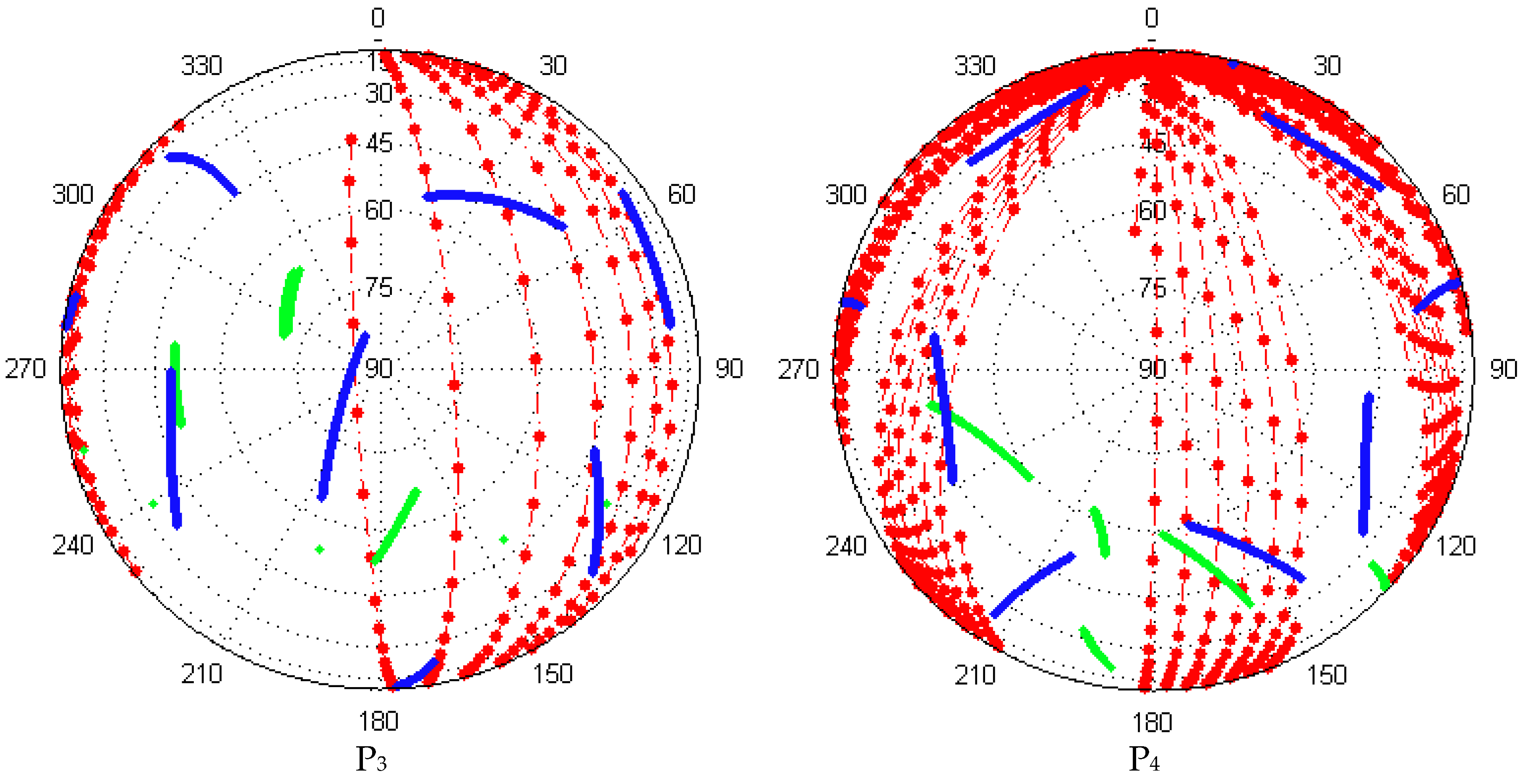
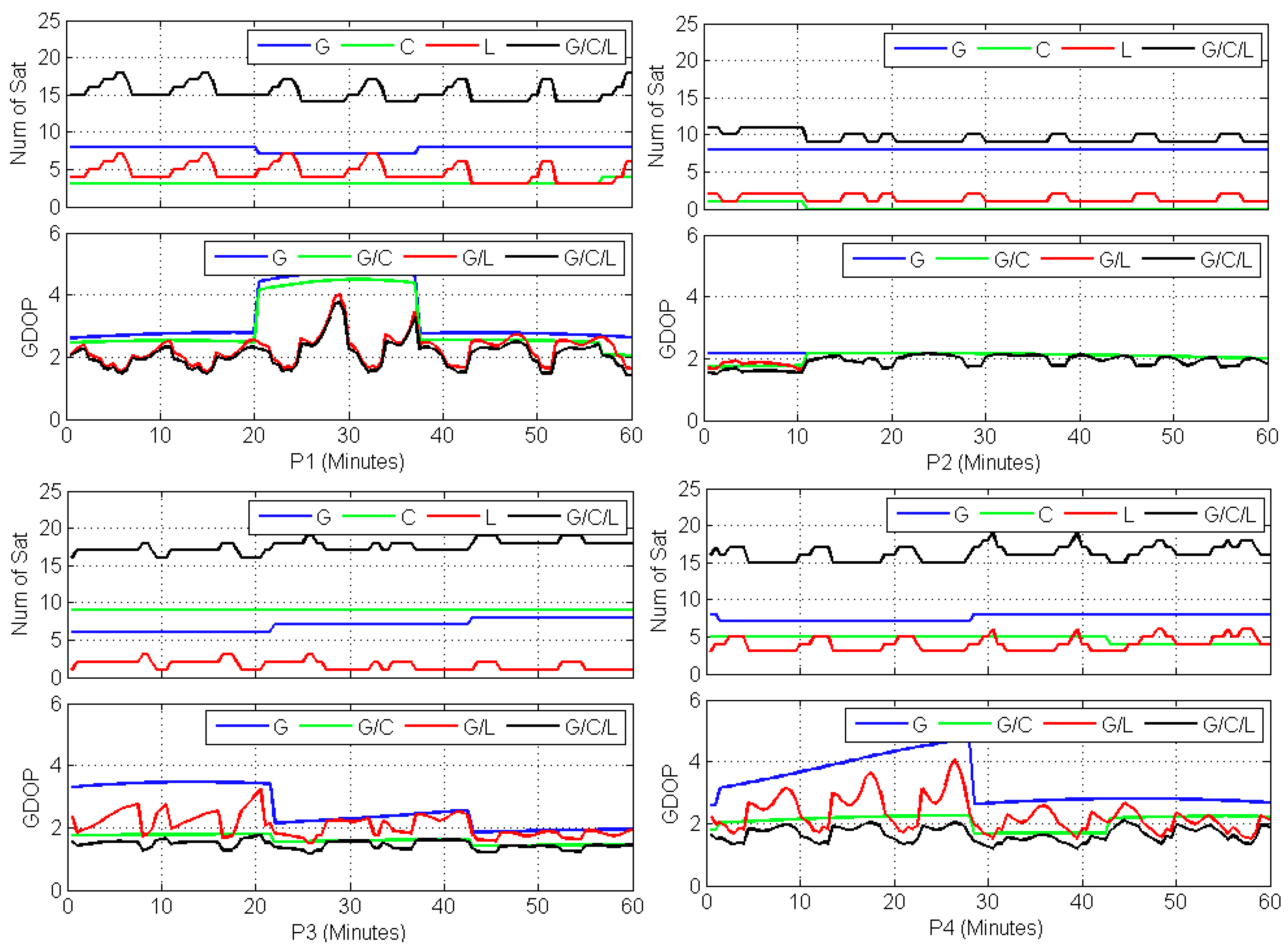
4.1. Satellite Visibility
4.2. Assessment and Analysis of LeGNSS PPP Performance
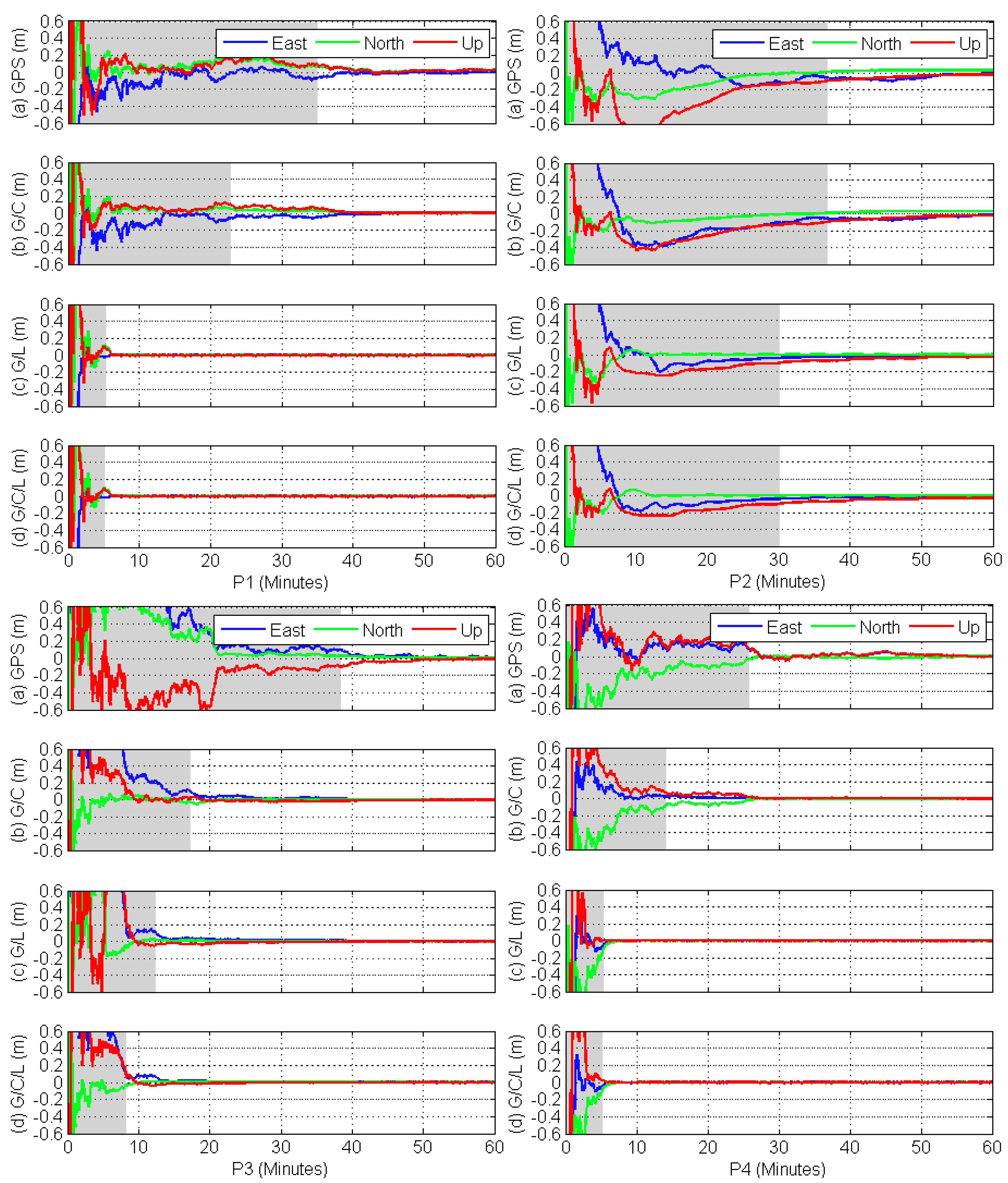
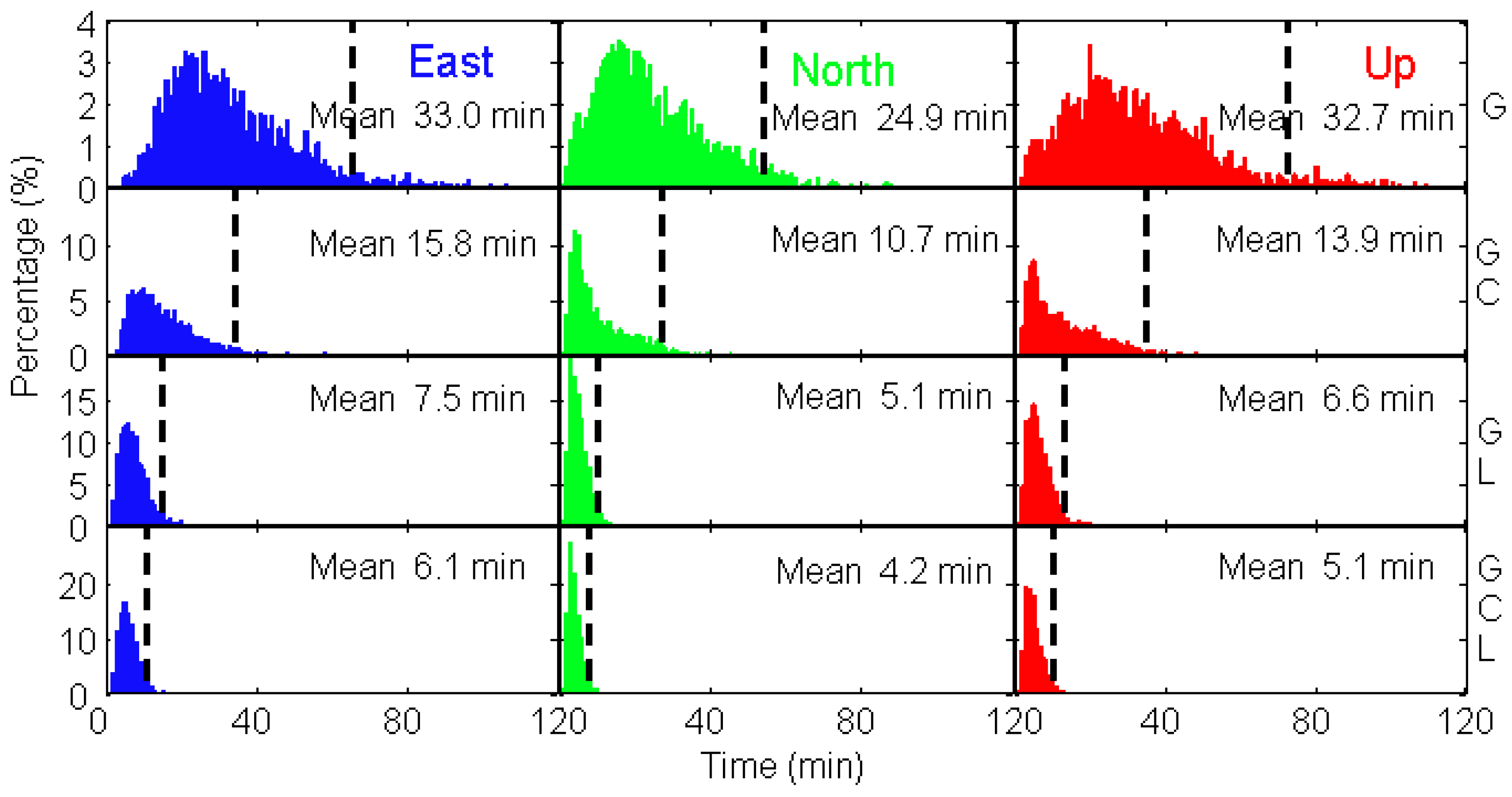
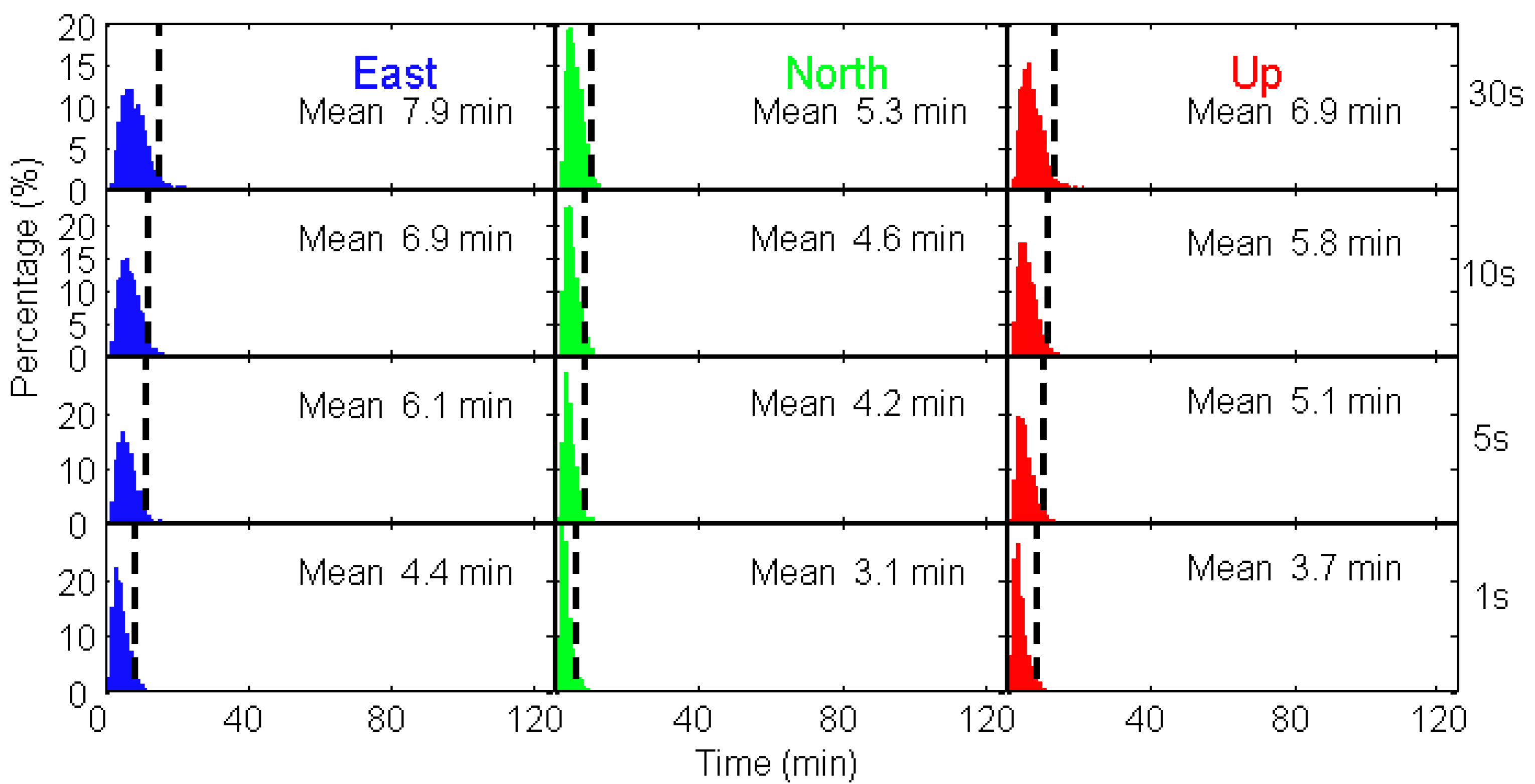
4.3. Statistical Analysis of Convergence Time on a Global Scale
5. Discussion
6. Conclusions
- (1)
- The LEO constellation can improve the availability of the current GNSS system, especially in the polar areas, since LEO are usually polar satellites. With 66 Iridium satellites, it is difficult to provide LEO-only positioning service since there are not enough satellites at medium and low latitudes.
- (2)
- LEO satellites are moving quite fast, flying overhead in minutes compared to the GNSS satellites in hours, which gives rise to improving the geometric condition of ground stations, resulting in the fast convergence time of PPP.
- (3)
- The convergence time of combined G/C/L can be shortened to 5 min in most of the areas of the world with 5 s data while, as far as we are concerned, it is impossible with GNSS to achieve such quick convergence even with 1 s data.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Bisnath, S.; Gao, Y. Current state of precise point positioning and future prospects and limitations. In Observing Our Changing Earth; Sideris, M.G., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 133, pp. 615–623. [Google Scholar]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geodesy 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Collins, P.; Lahaye, F.; Héroux, P.; Bisnath, S. Precise point positioning with ambiguity resolution using the decoupled clock model. In Proceedings of the ION GNSS 2008, Savannah, GA, USA, 16–19 September 2008; pp. 1315–1322. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geodesy 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Dodson, A.H.; Ge, M.; Teferle, F.N. Rapid re-convergences to ambiguity-fixed solutions in precise point positioning. J. Geodesy 2010, 84, 705–714. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y.; Feng, Y. Fast GNSS ambiguity resolution as an ill-posed problem. J. Geodesy 2010, 84, 683–698. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ge, M. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geodesy 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Geng, J.; Bock, Y. Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J. Geodesy 2013, 87, 449–460. [Google Scholar] [CrossRef]
- Li, M.; Qu, L.; Zhao, Q.; Guo, J.; Su, X.; Li, X. Precise point positioning with the BeiDou navigation satellite system. Sensors 2014, 14, 927–943. [Google Scholar] [CrossRef] [PubMed]
- Gu, S.; Lou, Y.; Shi, C.; Liu, J. BeiDou phase bias estimation and its application in precise point positioning with triple-frequency observable. J. Geodesy 2015, 89, 979–992. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y. Performance analysis of precise point positioning based on combined GPS and GLONASS. In Proceedings of the ION GNSS 2007, Fort Worth, TX, USA, 25–28 September 2007; pp. 858–865. [Google Scholar]
- Li, P.; Zhang, X. Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning. GPS Solut. 2014, 18, 461–471. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Cai, C.; Gao, Y. Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut. 2012, 17, 223–236. [Google Scholar] [CrossRef]
- Geng, J.; Shi, C. Rapid initialization of real-time PPP by resolving undifferenced GPS and GLONASS ambiguities simultaneously. J Geodesy 2017, 91, 361–374. [Google Scholar] [CrossRef]
- China Satellite Navigation Office (CSNO). BeiDou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal (Version 2.1); China Satellite Navigation Office: Beijing, China, 2016. [Google Scholar]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Li, T.; Wang, J.; Laurichesse, D. Modeling and quality control for reliable precise point positioning integer ambiguity resolution with GNSS modernization. GPS Solut. 2014, 18, 429–442. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X.; Guo, F. Ambiguity resolved precise point positioning with GPS and BeiDou. J Geodesy 2016, 91, 25–40. [Google Scholar]
- Pan, L.; Zhang, X.; Li, X.; Li, X.; Lu, C.; Liu, J.; Wang, Q. Satellite availability and point positioning accuracy evaluation on a global scale for integration of GPS, GLONASS, BeiDou and Galileo. Adv. Space Res. 2017. [Google Scholar] [CrossRef]
- Tegedor, J.; Øvstedal, O.; Vigen, E. Precise orbit determination and point positioning using GPS, Glonass, Galileo and BeiDou. J. Geod. Sci. 2014, 4, 65–73. [Google Scholar] [CrossRef]
- Hanson, W.A. In Their Own Words: OneWeb’s Internet constellation as described in their FCC form 312 application. New Space 2016, 4, 153–167. [Google Scholar] [CrossRef]
- Reid, T.G.; Neish, A.M.; Walter, T.F.; Enge, P.K. Leveraging Commercial Broadband LEO Constellations for Navigation. In Proceedings of the ION GNSS+ 2016, Portland, OR, USA, 12–16 September 2016; pp. 2300–2314. [Google Scholar]
- Liu, J.; Ge, M. PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ. J. Nat. Sci. 2003, 8, 603–609. [Google Scholar]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Use Artif. Satell. Geod. 1972, 15, 247–251. [Google Scholar]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- SMC/GP. Navstar Global Positioning System Interface Specification IS-GPS-200 (Revision D). 2004. Available online: https://www.gps.gov/technical/icwg/IS-GPS-200D.pdf (accessed on 21 June 2018).
- Enge, P.; Ferrell, B.; Bennett, J.; Whelan, D.; Gutt, G.; Lawrence, D. Orbital Diversity for Satellite Navigation. In Proceedings of the ION GNSS 2012, Nashville, TN, USA, 17–21 September 2012; pp. 3834–3845. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GNSS | LEO | ||
|---|---|---|---|
| Satellite part | BDS | GPS | LEO |
| Angular range | GEO/IGSO: 10° | 14.3° | 65° |
| MEO: 15° | |||
| PCO | YES | YES | NO |
| PCV | NO | YES | NO |
| Clock | YES | YES | YES |
| Receiver part | |||
| Cut off elev. | 1° | 1° | |
| PCO | YES | YES | |
| PCV | YES | YES | |
| Clock | YES | YES | |
| Solid/Pole/Ocean tidal | YES | YES | |
| Propagation path | |||
| Troposphere | YES | YES | |
| Ionosphere | NO | NO | |
| Phase windup | YES | YES | |
| General relativity | YES | YES | |
| STD of noise | |||
| Code | 1.0 m | 1.0 m | |
| Phase | 5 mm | 5 mm | |
| GPS-Only | GPS/BDS | GPS/LEO | GPS/BDS/LEO | |
|---|---|---|---|---|
| P1 | 34.9 | 22.8 | 5.2 | 5.2 |
| P2 | 36.8 | 36.8 | 30.0 | 30.0 |
| P3 | 38.3 | 17.1 | 12.3 | 8.2 |
| P4 | 26.0 | 14.0 | 5.3 | 5.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, H.; Li, B.; Ge, M.; Zang, N.; Nie, L.; Shen, Y.; Schuh, H. Initial Assessment of Precise Point Positioning with LEO Enhanced Global Navigation Satellite Systems (LeGNSS). Remote Sens. 2018, 10, 984. https://doi.org/10.3390/rs10070984
Ge H, Li B, Ge M, Zang N, Nie L, Shen Y, Schuh H. Initial Assessment of Precise Point Positioning with LEO Enhanced Global Navigation Satellite Systems (LeGNSS). Remote Sensing. 2018; 10(7):984. https://doi.org/10.3390/rs10070984
Chicago/Turabian StyleGe, Haibo, Bofeng Li, Maorong Ge, Nan Zang, Liangwei Nie, Yunzhong Shen, and Harald Schuh. 2018. "Initial Assessment of Precise Point Positioning with LEO Enhanced Global Navigation Satellite Systems (LeGNSS)" Remote Sensing 10, no. 7: 984. https://doi.org/10.3390/rs10070984
APA StyleGe, H., Li, B., Ge, M., Zang, N., Nie, L., Shen, Y., & Schuh, H. (2018). Initial Assessment of Precise Point Positioning with LEO Enhanced Global Navigation Satellite Systems (LeGNSS). Remote Sensing, 10(7), 984. https://doi.org/10.3390/rs10070984